Trabalho de conclusão de curso apresentado na Universidade Federal de Ouro Preto como parte dos requisitos para obtenção do título de bacharel em engenharia elétrica pelo Instituto de Ciências Exatas e Aplicadas da Universidade Federal de Ouro Preto. E por fim, à Universidade Federal de Ouro Preto, bem como a todos os seus colaboradores, pelo apoio prestado nesta jornada.
Introdução 1
Motivação e justificativa
Objetivos
Divisão do Trabalho
Revisão Bibliográfica 3
Encontrar todas as soluções para um grande problema pode se tornar inviável por limitações computacionais ou pelo tempo necessário para resolvê-lo. 2018) apresentam uma estratégia ótima de atribuição de PMU, formulada como um Problema de Programação Linear Inteira Mista (MILP), que leva em consideração quais fasores de corrente de ramificação cada PMU medirá, além de quais barras as PMUs serão instaladas. .
Modelagem do Problema 5
Introdução
Analogia ao problema
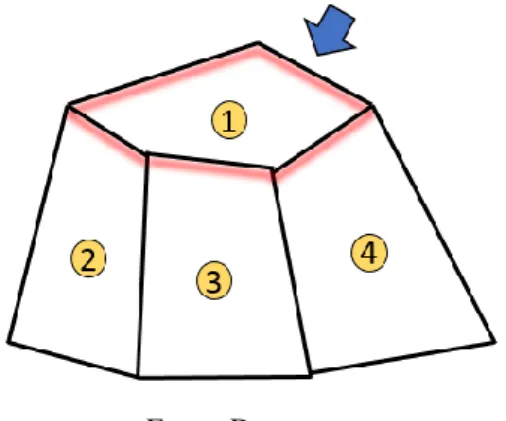
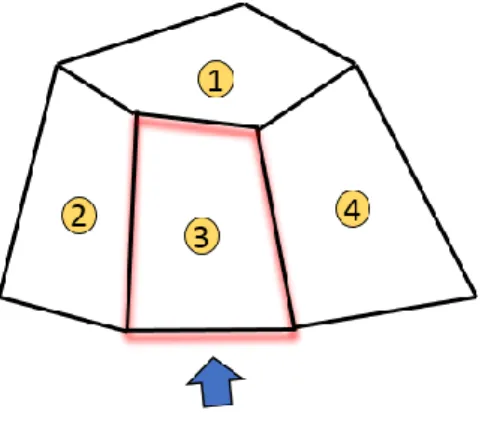
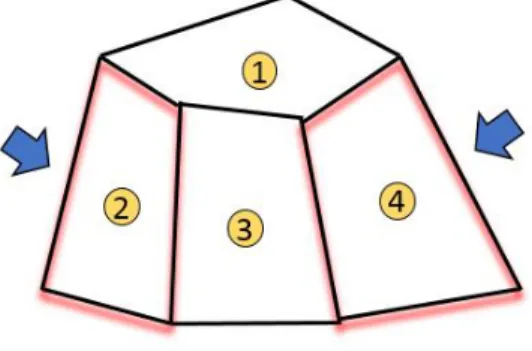
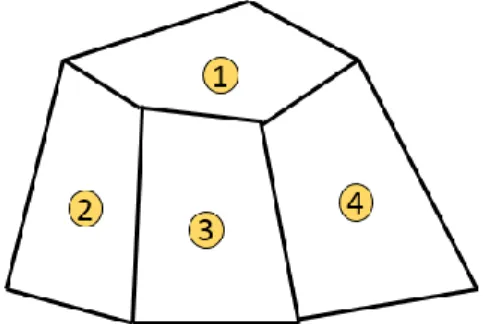
De acordo com o mapa da Figura 3.1, é possível observar que se trata de uma cidade dividida em quatro regiões distintas. Pelos números, é possível ter um número diverso de postos para atender toda a região.
Formulação Matemática do Problema de Recobrimento
- Exemplo Básico
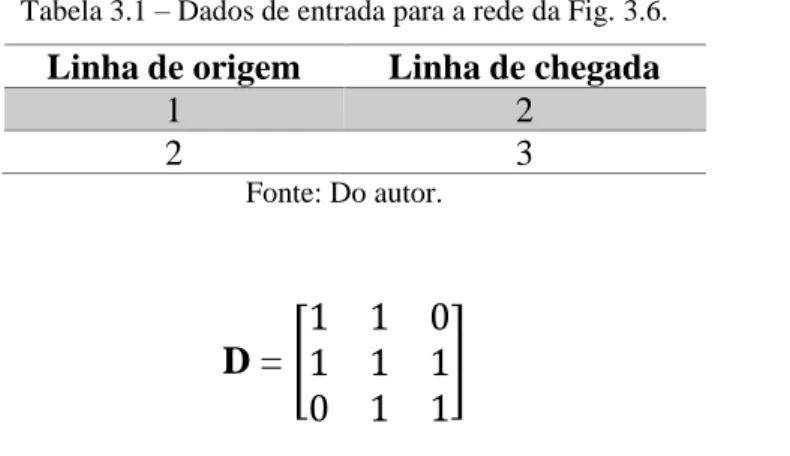
As restrições do problema de alocação devem caracterizar matematicamente as regiões vizinhas, pois uma região só é atendida se possuir quartel de bombeiros ou for adjacente a outra que o possua. Neste item, o problema apresentado é modelado, como exemplo de uma cidade dividida em quatro regiões, conforme a Figura 3.1.
Formulação Matemática do Problema de Alocação de Monitores
- Vetor de Existência
- Vetor de Custo
- Função Objetivo
- Descrição das Restrições do Problema
Os dados medidos e calculados são as correntes nas linhas de transmissão e as tensões nas barras. O problema de alocação de monitores PQ pode ser descrito como um PR da seguinte forma: devido às possíveis posições dos mediadores e feixes do sistema, bem como ao custo de instalação, o problema será encontrar o custo mínimo do sistema de monitoramento e sua solução deve mostrar o número mínimo necessário de monitores e suas possíveis localizações, garantindo total observabilidade das variáveis de estado. Para um sistema trifásico representado por seu equivalente monofásico, com n barras, L linhas em variáveis de estado, o número total de variáveis de estado é igual à soma do número de barras e linhas, como segue: m = n + l.
Os vetores de custo, c, e os vetores de existência, x, são semelhantes aos apresentados na Seção 3.3, mas sua dimensão é determinada de forma diferente, conforme detalhado abaixo. O objetivo deste problema é minimizar o custo total do sistema de monitoramento, que é dado pela soma dos custos de instalação de cada um dos medidores e pode ser descrito a seguir. As restrições deste problema devem garantir que todas as variáveis de estado sejam medidas ou calculadas por pelo menos um monitor PQ, isso é garantido pelas leis de Ohm aplicadas às redes elétricas, para que todas as variáveis de estado do Sistema Elétrico de Potência (SEP) sejam observadas.
Inicialmente, considera-se apenas a topologia da rede, após o que cada barra e linha de transmissão do sistema é identificada e listada com suas respectivas impedâncias. Assim como no exemplo da seção 3.2, onde foi garantido que uma estação instalada em uma região atende todas as regiões vizinhas, agora é necessário garantir que para qualquer sistema um monitor instalado em um barramento seja capaz de medir a tensão neste barramento e todas as correntes que saem desta barra, permitindo calcular a tensão nas outras barras desde que os parâmetros da linha sejam conhecidos.
Exemplos de Redes de Energia Elétrica
- Sistema de 3 barras
- Sistema de 7 barras
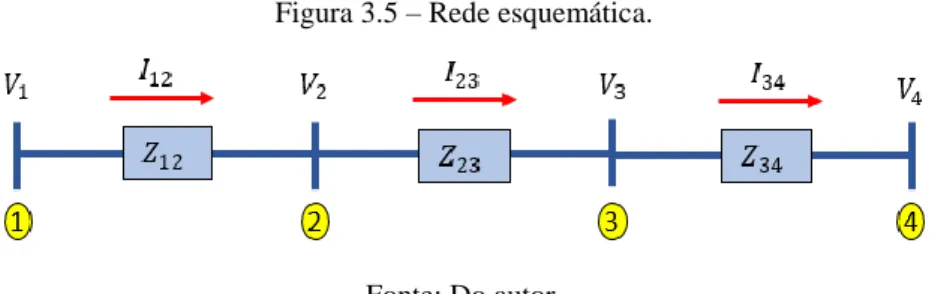
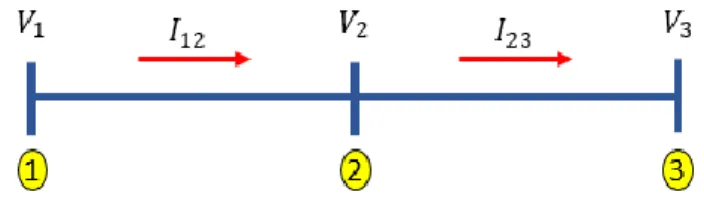
Para o sistema da Figura 3.5, por exemplo, um monitor colocado na barra 2 é capaz de medir a tensão nessa barra e as correntes que passam por ela, i12 e i23. Para descrever essa limitação, Eldery et al propuseram o uso das leis de Ohm, considerando o uso de dois lemas: tensão e corrente. Desta forma, o monitor instalado na barra 1 não cobre a tensão na barra 3 e a corrente na linha 2-3 e vice-versa.
A solução para este sistema seria a instalação de um monitor na barra 2, cobrindo a tensão e a corrente em todas as barras e linhas do sistema. Com base neste modelo, a próxima seção descreve o algoritmo de solução desenvolvido para encontrar as soluções ótimas, que fornecem o menor custo total do sistema de monitoramento e as possíveis localizações dos medidores neste sistema. A Figura 3.7 mostra um exemplo de um sistema de potência de sete barras, do qual será modelado.
Como esse sistema possui sete colunas, seu vetor de existência consistirá em sete variáveis de estado, conforme a seguir.
Construção da Matriz de Densidade através de matrizes auxiliaries
Sua coluna p representa o monitor montado no barramento p, e sua linha r representa a variável de estado r que se refere ao ijk atual na linha. Cada elemento dessas matrizes é composto pelos vetores aj e ak, que são os vetores correspondentes às linhas j e k da matriz de conectividade A. É importante ressaltar que os vetores Bj e Bk são definidos apenas para as variáveis de estado que representam as atual .
As matrizes A, Bj e Bk são escritas de forma que: a tensão nas barras esteja em ordem crescente de sua numeração e a corrente tenha os índices em ordem crescente. Apresentadas as matrizes auxiliares, pode-se construir a matriz densidade D, que terá dimensão igual ao número de barras ou variáveis de tensão, n, mais o dobro do número de linhas, 2L, em torno das variáveis de corrente que dependem de a tensão em duas barras, j e k, genérica. Onde A(1:n) n é a submatriz obtida da matriz de conexão das linhas 1 a n e todas as colunas, A(L:m) n é a submatriz obtida da matriz de conexão das linhas L a m e todas as colunas, Bj (L:m) n e Bk(L:m) n são as submatrizes obtidas das matrizes de interconexão das linhas L a me todas as colunas.
Exemplos utilizando a nova matriz de densidade D
- Sistema de 3 barras
- Sistema de 6 barras
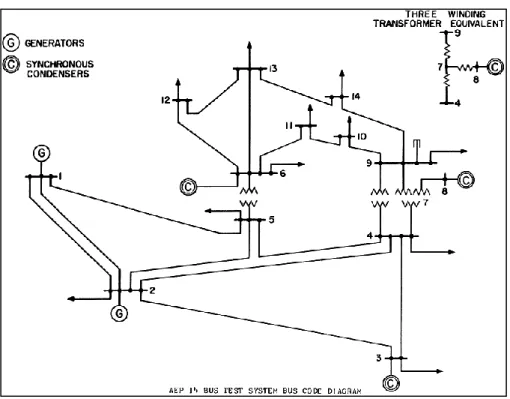
- Sistema IEEE 14 Barras
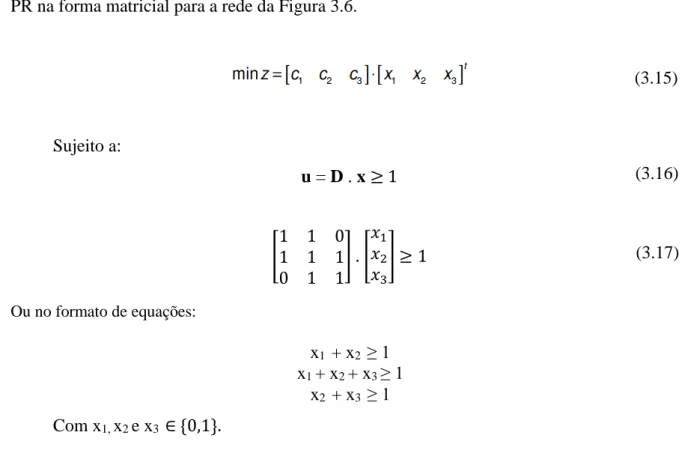
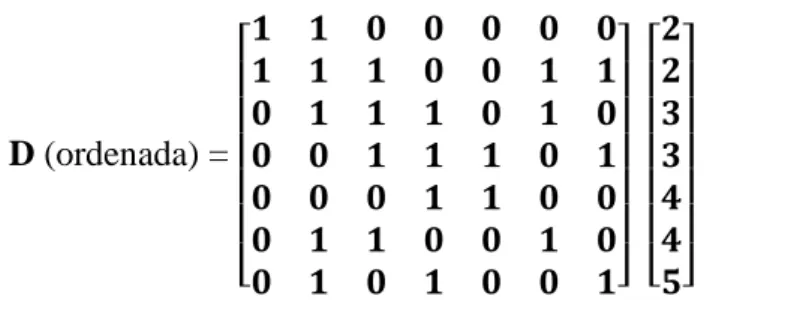
A formatação final do problema se dá através da modelagem matemática do PR na forma matricial a seguir. A modelagem PR completa do Sistema de Transmissão na Figura 3.8 apresentada por Eldery et al. Suas linhas representam as variáveis de estado, tensão ou corrente e as colunas os possíveis locais para instalação de medidores.
Em que suas linhas representam as variáveis de estado, tensão ou corrente e suas colunas as barras com os possíveis locais de instalação dos medidores.
Comparação entre os métodos de construção da Matriz de Densidade
Ou seja, embora o algoritmo realizado com a matriz simplificada D tenha se mostrado mais eficiente, a diferença de tempo foi muito pequena. Portanto, pode-se dizer que a escolha do método construtivo para a matriz densidade fica, portanto, a cargo dos critérios de projeto. Para redes com um número muito alto de barras, é definitivamente sugerido o uso da matriz simplificada D.
Solução do problema 30
Técnicas Aplicadas
- Variable Neighborhood Search (VNS)
Portanto, uma boa estratégia de busca local não deve se limitar a uma determinada região do espaço de soluções, por exemplo, em torno de uma solução construída por um algoritmo guloso. Na primeira fase, todos os dados do problema são lidos, a partir dos quais é gerada uma primeira solução do problema. Na segunda fase, uma solução é construída com base nas características arbitrárias e gulosas do GRASP.
Ou seja, a cada iteração, uma solução melhorada é obtida a partir da vizinhança da solução existente, até que nenhuma melhoria seja alcançada. Assim, as características favoráveis de uma solução existente serão preservadas e utilizadas para obter soluções vizinhas promissoras e/ou até melhores (MLADENOVIĆ; HANSEN, 1997). Feito isso, encontra-se uma solução inicial x, com a opção de aplicar uma busca local, visando melhorá-la.
Se a última vizinhança for alcançada sem que uma solução melhor do que a estabelecida seja encontrada, a busca é retomada na primeira estrutura de vizinhança N1(x) até que o critério de parada definido seja atingido (POSSAGNOLO, 2015). Inicialização: Escolher o conjunto de estruturas de vizinhança Nk, k = 1, …, kmax a ser utilizado na busca; encontre uma solução inicial x; definir um critério de parada;

Aplicação das Técnicas GRASP e VNS ao Problema de Alocação de PMUs
- Primeira Etapa (fase construtiva) – Algoritmo GRASP
- Segunda Etapa (fase de busca local) – Algoritmo VNS
Uma vez gerada uma solução (configuração dos locais de instalação das PMUs), na primeira fase (GRASP - fase de construção) é realizada uma busca local, ou seja, todas as soluções vizinhas desta configuração devem ser geradas dentro da estrutura do ambiente (MLADENOVIC , 1995), movendo-se um metro (aleatoriamente) em outro compasso. No caso de alocação de PMUs, uma solução é considerada mais próxima da outra, quanto menor o número de barras (locais) de alocação dos monitores que assumem estados diferentes do atual. Por outro lado, a geração de estruturas de vizinhança pode ser feita a partir de critérios de seleção, tais como: seleção de heurísticas existentes; alteração de parâmetros de métodos existentes; uso de k-shift; divisão de bairro entre outros.
A estratégia utilizada neste trabalho foi por k-mudanças, conforme ilustrado na Figura 4.2, que é a forma mais simples de gerar estruturas de vizinhança. Nessa busca, é realizada uma busca exaustiva, passando por todas as configurações na vizinhança da solução atual e determinando qual delas produzirá uma maior melhoria no valor da função objetivo atual; e (ii) Busca do primeiro melhor vizinho, que se caracteriza por percorrer todas as configurações de vizinhança até encontrar a primeira configuração de vizinho com melhor qualidade do que a solução atual. Se for encontrada uma solução com valores de seu vetor maiores que um, o número de monitores é reduzido em uma unidade.
Se o algoritmo encontrar uma configuração com qualidade melhor que a solução atual (solução atual), ele se torna a nova solução atual (solução atual) e a busca é retomada em k=1. Caso contrário, quando o número de trocas de posição das PMUs atingir três vezes o número de barras, a seguinte estrutura de vizinhança k=k+1 é passada.
Resultados e Discussões 42
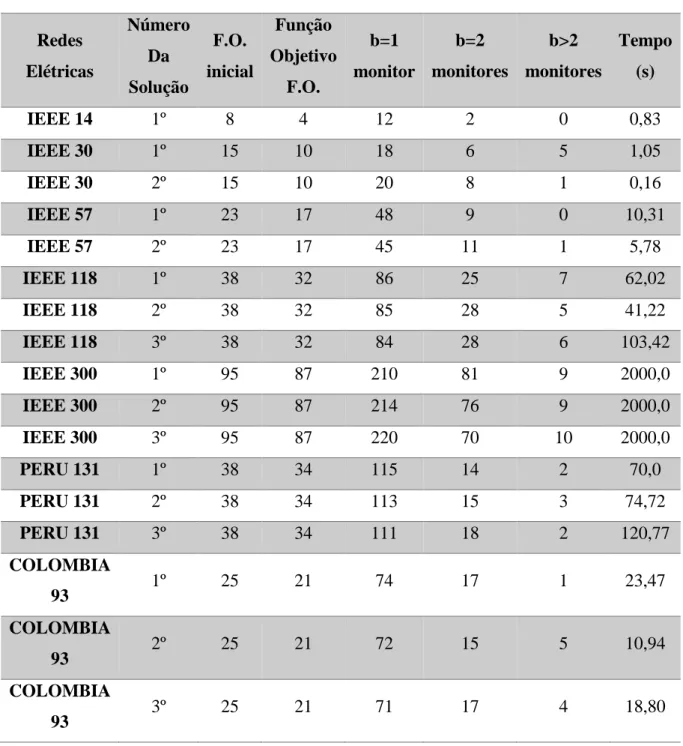
Analisando a Tabela 5.1, percebe-se que o número de PMUs (F.O.) é muito inferior ao número de barras em todas as redes, o que indica que a solução ótima encontrada foi satisfatória para otimizar o layout do monitor. O número de linhas observadas por mais de dois monitores aumentou na última solução em relação à primeira, como é o caso das redes: IEEE 30, IEEE 118, IEEE 300 e COLOMBIA 93. Ou a maior observabilidade foi alcançada na primeira soluções ou foi devido a.
A Tabela 5.2 acima mostra a comparação entre os resultados obtidos pelo método neste trabalho e os encontrados na literatura.
Conclusão 45
Allocation of Power Quality Supervisors with Clone Algorithm Paulo Estevão Teixeira Martins; 17th International Conference on Harmonics and Quality of Power (ICHQP), pp.