Departamento de Física (DEFIS) da Universidade Federal de Ouro Preto, como parte dos requisitos para obtenção do título de Bacharel em Física. Caracterização do caos em sistemas dinâmicos por meio do método sali: estudo aplicado ao pêndulo amortecido forçado. Monografia apresentada ao curso de Física da Universidade Federal de Ouro Preto como requisito parcial para obtenção do título de Bacharel em Física.
O objetivo deste trabalho é apresentar o método Smaller Alignment Index (SALI) como uma ferramenta eficiente para detectar a presença de caos em sistemas dinâmicos não lineares. Em alguns casos, o caos pode ser observado em sistemas não lineares quando determinados valores de parâmetros são atingidos. Conclui-se que o método SALI é uma importante ferramenta para detecção de caos em sistemas dinâmicos não lineares.
INTRODUÇÃO
OBJETIVOS
METODOLOGIA OU INTRODUÇÃO TEÓRICA
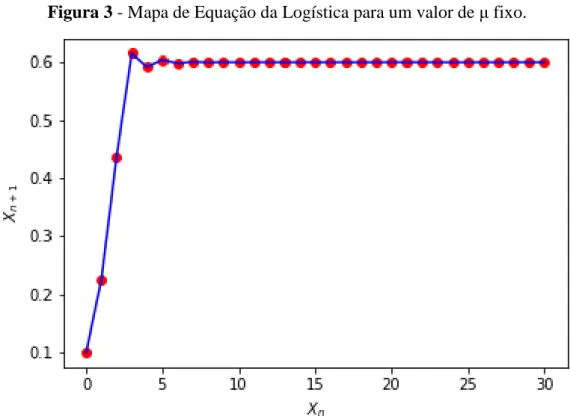
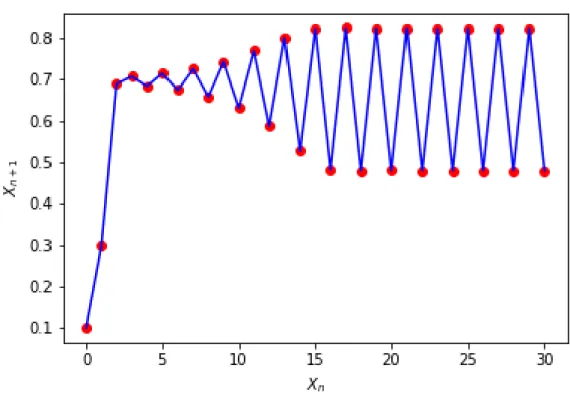
O MAPA LOGÍSTICO
A partir deste ponto, o ciclo do período 2 é substituído pelo ciclo do período 4, conforme mostra a Figura 5.

E XPOENTE DE L YAPUNOV PARA M APA L OGÍSTICO
12), podemos notar que se o valor do expoente de Lyapunov (λ) for negativo, então teremos um fator exponencial decrescente, o que significa uma diminuição da diferença entre os valores correspondentes de 𝑥𝑛 das duas sequências. for positivo, teremos um fator exponencial crescente, o que significa um aumento na diferença entre os valores correspondentes de 𝑥𝑛 das duas sequências. Mostramos no gráfico 1 o expoente de Lyapunov calculado conforme a Eq. 14) em função de 𝜇 para o mapa logístico. Variando nosso parâmetro 𝜇, observamos janelas onde λ < 0, indicando a existência de comportamento periódico, e λ > 0, indicando a existência de comportamento caótico.
A janela relativamente larga, logo acima de 𝜇 = 3,8, é visível na Figura 8 e na Figura 9, e pode ser vista no Gráfico 1.

S EÇÃO DE P OINCARÉ
C AOS PARA UM PÊNDULO
A existência de regimes caóticos e não caóticos depende sensivelmente dos valores dos parâmetros 𝑞, 𝑔 e 𝜔𝑑. O gráfico 2 e o gráfico 3 mostram o espaço de fase para um pêndulo amortecido ou amortecido forçado obtido a partir da solução numérica da equação. 17) com o método Runge-Kutta. O espaço de fase mostrado no gráfico 2, onde 𝑔 = 0, incide sobre o sistema sem força externa, mas com amortecimento. O espaço de fase para este sistema consiste em trajetórias em forma de espiral que convergem para um ponto chamado ponto de equilíbrio estável localizado em θ = θ' = 0.
As trajetórias no espaço de fase correspondem a oscilações de pêndulo amortecidas, onde a amplitude e a velocidade angular diminuem com o tempo devido ao efeito de amortecimento. No gráfico 3 temos um sistema com uma força senoidal externa aplicada e amortecimento presente. Mais adiante mostraremos que esse tipo de comportamento para o espaço de fase é gerado pela dinâmica caótica.
No pêndulo amortecido, 𝑔 = 0, a velocidade angular ω diminui com o tempo devido às forças dissipativas presentes no sistema, como o atrito do ar ou a resistência do material do pêndulo. Isso ocorre porque essas forças dissipativas reduzem a energia total do sistema, o que se traduz em uma redução na amplitude de oscilação e uma diminuição na velocidade angular. No Gráfico 7 e no Gráfico 8, ω apresenta um comportamento periódico, após um transiente, em resposta a uma força externa, conforme observado no espaço de fase do Gráfico 3 e do Gráfico 4.
No gráfico 9 apresentamos a evolução temporal da velocidade angular de dois pêndulos forçados e amortecidos com os mesmos parâmetros do gráfico 5. Para identificar se um sistema é caótico pela seção de Poincaré, é necessário examinar o padrão de pontos na gráfico. Em um diário, o caminho no espaço de fase sempre cruza a seção no mesmo ponto, como podemos ver no gráfico 10 e no gráfico 11.
Isso ocorre porque o sistema evolui periodicamente no espaço de fase, passando pela seção de Poincaré em intervalos regulares. Isso acontece porque o sistema apresenta um comportamento complexo e errático no espaço de fase, levando a interseções irregulares e imprevisíveis com a seção de Poincaré, exemplo que temos no gráfico 12. afeta a dinâmica do sistema e pode levar a intervalos de 𝑔 onde o sistema se comporta de forma caótica e não caótica conforme este parâmetro varia.

A PLICAÇÃO DO E XPOENTE DE L YAPUNOV NO P ÊNDULO F ORÇADO E
O expoente de Lyapunov é calculado como o limite de tempo da média dos valores absolutos das partes reais dos autovalores, pois os componentes da matriz Jacobiana mudam ao longo do tempo: As taxas médias de expansão ou contração ao longo dos eixos principais 𝐿𝑖(𝑡) são expoentes de Lyapunov. Calculando os expoentes da Eq. 30) é impraticável porque pontos iniciais próximos divergem rapidamente uns dos outros por distâncias próximas ao tamanho do atrator, o que torna o cálculo impraticável para capturar taxas locais de divergência e contração.
Os expoentes de Lyapunov são calculados como a média de muitos segmentos do caminho central. Para o pêndulo, existem três expoentes de Lyapunov, pois as equações têm três variáveis e a soma dos expoentes deve ser negativa, pois o sistema é dissipativo. Um expoente corresponde à direção paralela ao caminho e não contribui para a expansão ou contração dos volumes de fase, sendo seu correspondente expoente de Lyapunov igual a zero.
Por outro lado, os expoentes de Lyapunov medem o crescimento exponencial ou a taxa de decaimento das perturbações no sistema. Esta equação nos mostra que a taxa de dissipação de energia do sistema está diretamente relacionada à soma dos expoentes de Lyapunov. Quanto maior a soma dos expoentes de Lyapunov, maior a taxa de dissipação de energia, implicando em um sistema mais caótico e menos previsível.
Observamos que ambos os expoentes se tornam assintoticamente negativos, indicando que o sistema se comporta corretamente. No entanto, os valores absolutos dos expoentes são maiores do que no primeiro sistema, o que indica que as trajetórias próximas se aproximam ou se afastam mais rapidamente. Em resumo, a análise do expoente de Lyapun bidimensional para diferentes valores de amplitude e amortecimento em um oscilador forçado amortecido permite identificar diferentes comportamentos, do regular ao caótico, e entender como a dinâmica do sistema muda com o parâmetro variação.
Também podemos ver que, como mostra a equação (32), a soma dos expoentes de Lyapunov é igual à razão 1/q, ilustrando o que ocorre na Figura 11.

M ÉTODO SALI
A existência do expoente positivo confirma o comportamento caótico revelado pela seção de Poincaré para este conjunto de valores. Para simplificar nossa representação, consideramos a norma euclidiana usual (denotada por ‖∙‖) e normalizamos os vetores para vetores unitários. No caso de órbitas caóticas, esse procedimento é mostrado esquematicamente na Figura 13, onde os dois vetores de desvio unitário inicialmente distintos 𝑤̂1(0), 𝑤̂2(0) convergem na mesma direção.
A legenda descreve uma representação esquemática da evolução dos dois vetores de deflexão e o SALI correspondente para uma órbita caótica. Os valores SALI são dados pelo comprimento das menores diagonais dos paralelogramos cinza definidos pelos vetores 𝑤̂1(0), 𝑤̂2(0) e 𝑤̂1(𝑡), 𝑤̂2(𝑡), representados por SALI(0) e SALI (t) respectivamente. É importante ressaltar que a Figura 13 é apenas uma representação esquemática no plano dos vetores de desvio, que são objetos que evoluem em espaços multidimensionais.
No caso de órbitas regulares, os vetores de deflexão caem no espaço tangente do toro em que ocorre o movimento e geralmente têm direções diferentes, pois não há razão para que se alinhem [13, 14]. Na prática, os valores de SALI exibem flutuações limitadas em torno de um número positivo constante. Consideramos dois vetores inicialmente distintos de desvio unitário 𝑤̂1(0), 𝑤̂2(0) do ponto P(0), que não necessariamente estão no espaço tangente do toro (esse espaço é representado por um paralelogramo sombreado passando por P( 0).
À medida que o tempo evolui, os vetores de desvio tendem a cair no espaço tangente do toro e os vetores unitários correspondentes 𝑤̂1(𝑡), 𝑤̂2(𝑡) em um determinado momento t > 0 estão "mais próximos" do espaço tangente atual (ou seja, o paralelogramo sombreado passando por P(t), conforme mostrado pelo encurtamento das linhas tracejadas perpendiculares aos espaços tangentes das arestas dos vetores de deslocamento. Como não há razão para os vetores de deslocamento se alinharem, SALI não se tornará zero .Calcular o expoente de Lyapun, por exemplo, pode ser computacionalmente caro, pois envolve calcular infinitas pequenas diferenças no tempo que aumentam ou diminuem exponencialmente com o tempo.
Além disso, o SALI pode ser usado em sistemas de alta dimensão onde o cálculo do expoente de Lyapunov é muitas vezes inviável.

RESULTADOS E DISCUSSÃO
O gráfico da escala loglog mostra a evolução temporal do SALI para um determinado tempo t iteração com os seguintes valores de parâmetros para o pêndulo amortecido e forçado: q=4, g=0,8 e 𝜔𝑑 = 2. O gráfico da escala loglog mostra o tempo evolução do SALI para um determinado tempo t iteração com os seguintes valores de parâmetros para o pêndulo amortecido e forçado: q=4, g=0,95 e 𝜔𝑑 = 2. Em todos eles, a quantidade de tempo é reduzida, confirmando a eficácia do método SALI em distinguir entre órbitas caóticas e regulares e a velocidade com que pode detectar a presença de comportamento caótico em um sistema dinâmico.
Por outro lado, o método SALI pode ser ineficaz quando órbitas caóticas estão muito próximas de órbitas regulares, por exemplo visto no Gráfico 22 (curva laranja), no Gráfico 23 (curva verde), a convergência orbital é mista. Neste caso, a diferença entre os valores de SALI para órbitas caóticas e órbitas regulares pode ser pequena, dificultando a distinção entre ambas, levando-nos a concluir que, em situações onde o sistema dinâmico é muito complexo e presente. muitas órbitas, o método pode demorar muito para calcular os valores de SALI para cada órbita, o que pode ser impraticável em termos computacionais, ou seja, outras técnicas de análise de sistemas dinâmicos podem ser necessárias [12]. O gráfico em escala loglog mostra a evolução temporal do método SALI, para um determinado tempo t de iteração, com quatro valores do parâmetro g, com q=4 e 𝜔𝑑 = 2.
O gráfico loglog mostra a evolução temporal do método SALI para um determinado tempo de iteração t, com quatro valores dos parâmetros g, onde q=3,9 e 𝜔𝑑 = 2. O gráfico log log mostra a evolução temporal do método SALI para um dado tempo de iteração t, com quatro valores dos parâmetros g, onde q=4,1 e 𝜔𝑑 = 2. No geral, os resultados mostram que o método SALI é uma ferramenta promissora para detecção de caos em sistemas dinâmicos.
Os gráficos apresentados mostram claramente a diferença no comportamento do índice SALI para trajetórias regulares e caóticas no sistema de pêndulo forçado amortecido. Além disso, o método SALI se mostrou mais eficiente no cálculo do expoente de Lyapunov com menor custo computacional. Assim, conclui-se que o método SALI é uma ferramenta útil para detecção de caos em sistemas dinâmicos de baixa dimensão, sendo capaz de fornecer informações importantes sobre o comportamento de trajetórias.

CONCLUSÃO