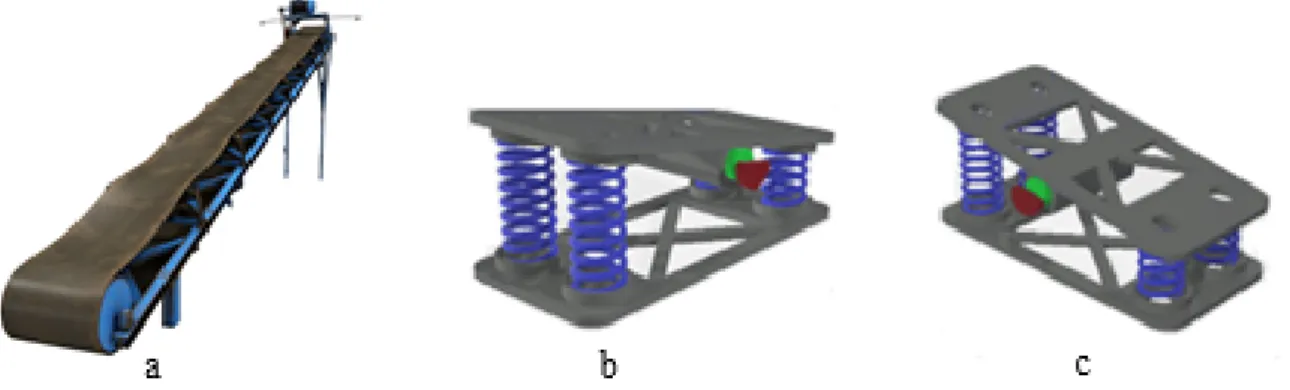
Em ambas as análises, a limitada fonte de energia que aciona a esteira, um motor DC não ideal, está ligada à sua estrutura, constituindo um sistema não ideal. O presente trabalho consiste no estudo de uma correia transportadora utilizada no processo de produção de açúcar e álcool, também conhecida como usina sucroalcooleira, muito comum no Brasil e na América Latina.
INTRODUÇÃO
- Motivação
- Descrição do Problema Abordado
- Objetivos
- Estrutura da Dissertação
O outro dispositivo no sistema é a rotina canvas, que é o foco deste estudo de pesquisa e está marcada em vermelho na Figura 1.3. Desta forma, o nível da calha; ilustrado na Figura 1.4, tem uma forte correlação com a produtividade do sistema.

REVISÃO E POSIÇÃO DO
PROBLEMA NA LITERATURA
Efeito Sommerfeld em Sistemas Dinâmicos Não- Ideais
Sommerfeld, em 1904, foi o primeiro a realizar um experimento analisando o acoplamento de uma fonte de alimentação (motor DC) a uma estrutura flexível. Neste experimento, diferentemente do esperado, o motor DC apresentou velocidade angular flutuante, apesar de continuar aumentando sua tensão de armadura. Kononenko revisou os trabalhos publicados e enfatizou que o primeiro trabalho em 1940 foi realizado para realizar um estudo qualitativo da interação existente entre a estrutura e a fonte, através da observação das oscilações que ocorriam na velocidade angular do motor próximo a a região de ressonância da estrutura, embora o mesmo fenômeno tenha sido discutido em 1939, mas sem analisar as variáveis de torque do motor, ou sem considerar o motor de corrente contínua como uma fonte de energia finita não linear.
O autor destaca que trabalhos anteriores demonstraram a detecção desse fenômeno, mas sem dar uma explicação completa de sua causa, sabendo apenas que se tratava de uma interação entre a fonte de energia e sua estrutura. Em 1958, o autor igualou a não linearidade de um motor DC e notou uma influência da velocidade ao passar pela zona de captura, com influência direta da velocidade na forma como ocorre a manifestação do efeito Sommerfeld, e esta observação foi confirmada experimentalmente mais tarde.
Trabalhos publicados com diferentes abor- dagens estruturais e estratégias de controledagens estruturais e estratégias de controle
Esta técnica vem sendo estudada como uma das estratégias de controle, pois sua capacidade de alterar suas propriedades permite que seja utilizada como atuador, onde (KOSSOSKI et al., ) realizaram um estudo através da variação de temperatura em materiais inteligentes, verificando a viabilidade. na aplicação deste tipo de material para um modelo matemático que consiste em uma viga fixada em uma extremidade com um motor de corrente contínua fixado em sua extremidade livre. Alternativas de controle para amortecimento de amplitudes de vibração que visam alterar a massa ou rigidez da estrutura representam uma alternativa à supressão de vibração, uma vez que a característica limitada da fonte de energia pode não representar possibilidade de alteração. Os trabalhos (PETROCINO et al., 2022) e (GONÇALVESet al., 2014b) abordam claramente a característica da potência limitada da fonte de energia, que pode apresentar um problema ao passar pela região de ressonância, devido à falta de potência disponível . para vencer a região de ressonância da estrutura, fazendo com que o motor CC fique preso nesta região. Em ambos os trabalhos, a estrutura utilizada consiste em uma viga fixada em uma de suas extremidades e um motor DC desbalanceado fixado na extremidade livre, porém com análise numérica e experimental com maior concentração nos parâmetros elétricos do motor DC.
A estratégia para resolver o problema do salto vibratório controlando o motor DC foi investigada por (BISOI; SAMANTARAY; BHATTACHARYYA, 2017) modificando as características do motor DC para que mais corrente possa ser entregue na faixa de frequência natural da estrutura, como , como encontrado na pesquisa de. MUKHERJEE; KARMAKAR; SAMANTARAY, 1999), o motor não pode ultrapassar seu limite de estabilidade, pois próximo a este limite, qualquer energia adicional fornecida ao motor irá excitar a estrutura e assim aumentar a amplitude das vibrações estruturais, conforme também relatado por (CVETIĆANIN, 2010). Em ambos os trabalhos, a estrutura utilizada consiste na mesma estrutura que foi utilizada no trabalho com (BALTHAZAR et al., 2001).
Trabalhos publicados com estruturas seme- lhantes ao modelo utilizado neste trabalholhantes ao modelo utilizado neste trabalho
Esse tipo de aumento nas vibrações estruturais foi observado por (TSUCHIDAet al., 2003), que realizou um estudo utilizando um sistema de dois graus de liberdade com ressonância 1:1 e observou um aumento na amplitude de vibração da estrutura. D representa o centro do eixo do motor e r, a distância do eixo até sua extremidade representada por A, onde está localizada a massa desbalanceada. A análise do modelo matemático da obra de (ALIŞVERIŞÇIet al., 2015), permitiu o desenvolvimento da estrutura utilizada neste trabalho para análise numérica e experimental, representando a esteira com uma abordagem que apresenta a parte móvel da estrutura como um corpo sólido.
Portanto, uma visão geral dos trabalhos publicados permite concluir que diversas configurações construtivas apresentam a manifestação do efeito Sommerfeld e que as observações realizadas, tanto nas variáveis da estrutura quanto da fonte de energia, demonstram um desafio para a engenharia. Estratégias para reduzir os efeitos do aumento da amplitude da estrutura possuem abordagens que consistem em alterar as propriedades mecânicas da mesma, através do uso de absorvedores e materiais inteligentes.
MODELAGEM MATEMÁTICA
Representação do Modelo Físico
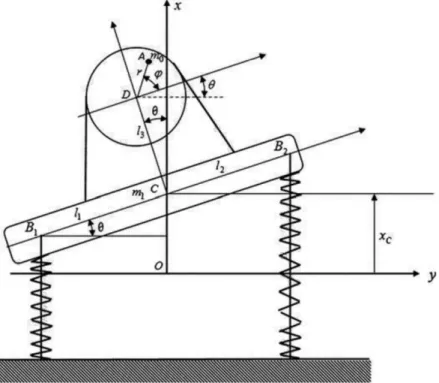
A Figura 3.1 mostra o modelo e as relações geométricas, onde o corpo rígido representa a correia transportadora e os comprimentos são definidos tendo como referência o centro de gravidade da estrutura. Esses comprimentos, denominados a, b, c e d, representam o tamanho da esteira, h representa o comprimento entre o vetor de força vertical e o centro de massa da estrutura C, e representa o comprimento entre o centro de massa C e o centro da estrutura. Eixo do motor CCB. A variável r representa o comprimento entre e o centro do eixo do motor DC B e a posição da massa desbalanceada A, onde a massa m2 é fixa.
O sistema foi modelado para obter variações angulares transversais, através do ângulo α, e variações angulares longitudinais, através do ângulo θ.
![Figura 3.1: Representação do Modelo[Desenvolvido pelo autor]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17605001.4190567/33.892.117.778.625.853/figura-representação-do-modelo-desenvolvido-pelo-autor.webp)
Equações Governantes do Movimento
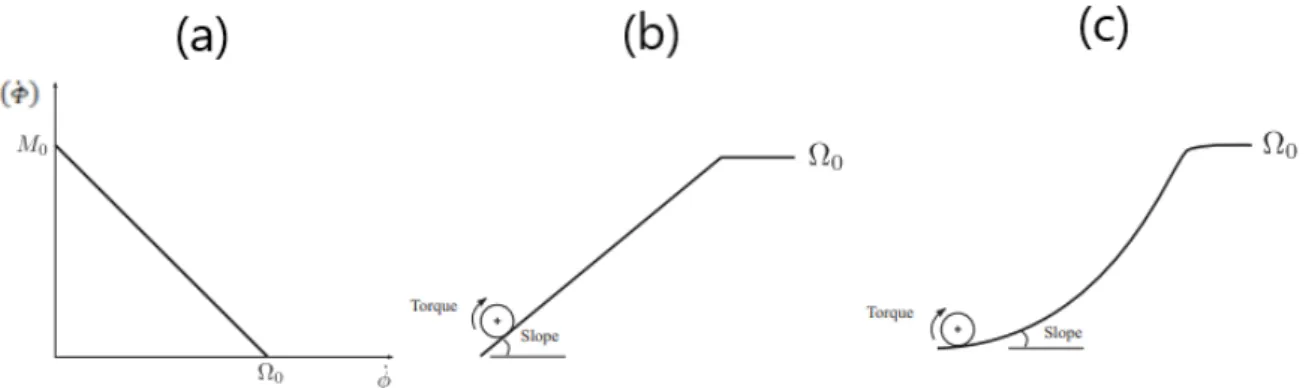
Onde τ representa o torque disponível no eixo do motor DC em função da velocidade de acordo com a Eq. Conforme a Figura 3.3(a), quando a velocidade angular Φ é igual a zero, o torque M0 é máximo, ou seja, o valor do torque transmitido ao eixo do motor DC e consequentemente convertido em força para o movimento da esteira motorizada . À medida que a velocidade angular aumenta, o torque disponível no eixo do motor DC diminui linearmente, como mostrado na Figura 3.3(b), chegando a um valor igual a zero, e Ω0 representa a velocidade angular quando o torque disponível no eixo do motor DC é zero.
Para obter o efeito da aceleração do motor entre o torque inicial e final, é necessário definir Ω0 como uma função dependente do tempo conforme a Eq. A variável t2 representa o tempo de aceleração para a variação do motor DC entre a velocidade angular inicial Ω1 e a velocidade angular final Ω2.
Equações Governantes do Movimento em Va- riáveis de Estadoriáveis de Estado
Assim, o valor do torque passa a depender de Ω2, que é a velocidade angular quando o torque é zero, e Ω1, a velocidade angular inicial quando o torque é máximo. A variável t2 influencia diretamente como ocorre o efeito Sommerfeld, onde uma passagem mais rápida pela frequência de ressonância faz com que a captura da velocidade angular do motor DC apresente oscilações de velocidade de formas distintas. A representação do modelo para obtenção do comportamento dinâmico da esteira real e desenvolvimento das equações de movimento do sistema, bem como sua representação em espaço de estados para análise do comportamento dinâmico da esteira, mostrou-se eficiente, com um modelo que permite a verificação das variáveis de interesse para este estudo.
As referências utilizadas para o desenvolvimento do modelo foram muito importantes para a obtenção de um modelo confiável, pois a representação da correia transportadora como um corpo rígido difere de vários trabalhos que retratam a correia como um conjunto de elementos.
ANÁLISE DAS FREQUÊNCIAS NATURAIS
Frequências Naturais e Modos de Vibração Lineares
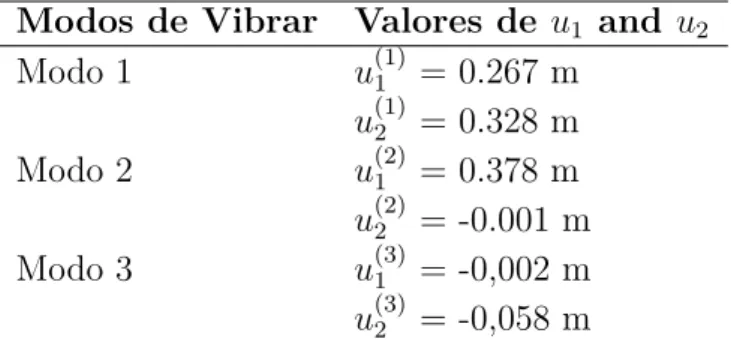
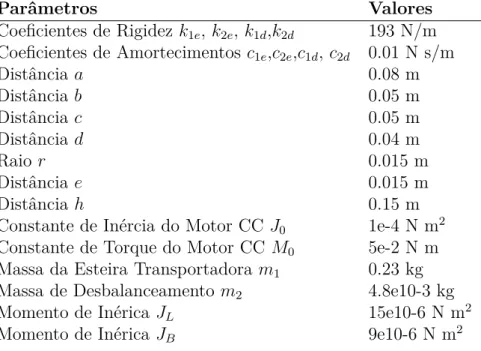
Os valores dos parâmetros foram escolhidos de acordo com o modelo experimental para as distâncias a, b, c, d, g, h e rand para as massas m1 e m2. Mostra os valores obtidos, onde para o terceiro modo de oscilação, para cada unidade de deslocamento em x, realiza um grande deslocamento angular α. Verificou-se que o terceiro modo de vibração representa um limite a ser evitado, pois pode comprometer a integridade do equipamento.
Na figura 4.1 é apresentada a projeção das distâncias obtidas na tabela 4.2 e as linhas tracejadas ilustram os deslocamentos angulares de α e θ, o que permite visualizar como ocorrerão os deslocamentos de cada ângulo conforme as vistas frontal e horizontal de o equipamento. A normalização foi realizada para determinar as variações angulares para cada unidade de variação x, o que permite determinar a influência de cada modo de vibração nos movimentos angulares transversais e longitudinais.
Conclusões Sobre o Capítulo
RESULTADOS NUMÉRICOS
Simulação Numérica
Novamente há um aumento, desta vez mais modesto, nas amplitudes de vibração até cerca de 160 s quando ocorre novamente a diminuição característica do efeito. A Figura 5.3 apresenta o ângulo transversal da estrutura, evidenciando o aumento das amplitudes de vibração da estrutura com posterior diminuição brusca em cerca de 50 segundos, assim como a Figura 5.2. Para esta figura, ainda existem regiões onde o aumento das amplitudes de vibração ocorreu de forma significativa, como em cerca de 160 segundos, mas a diminuição não ocorre abruptamente, como é característico do efeito Sommerfeld, e diminui gradativamente até cerca de 220 segundos.
A Figura 5.4 apresenta o deslocamento angular longitudinal da estrutura, mostrando o aumento das amplitudes das oscilações da estrutura a partir de cerca de 90 segundos. O aumento do valor das amplitudes de vibração ocorre de maneira típica do efeito Sommerfeld, ocorrendo uma diminuição brusca em aprox.
Conclusões Sobre o Capítulo
RESULTADOS DA ANÁLISE EXPERIMENTAL
Materiais e Métodos
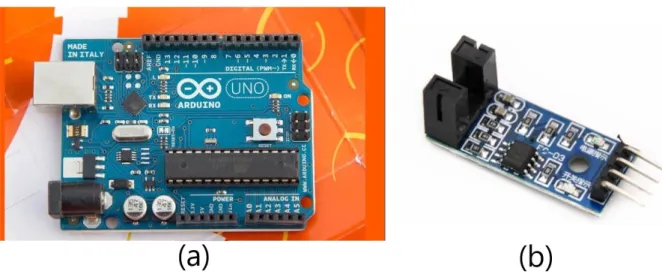
A Figura 6.2 mostra uma estratégia semelhante usada para medir a velocidade angular, onde um disco com 4 furos é preso ao eixo do motor para permitir a passagem do feixe de luz vindo do transmissor. O número de interrupções, que é igual ao número de furos na bobina, corresponde a uma rotação, o que permite medir a velocidade angular do motor DC. A medição da vibração é realizada com um celular iPhone 6, que pode ser visto na Figura 6.3.
Existe um acelerômetro que permite a identificação de vibrações através de diversos aplicativos disponíveis gratuitamente.
Desenvolvimento do Experimento
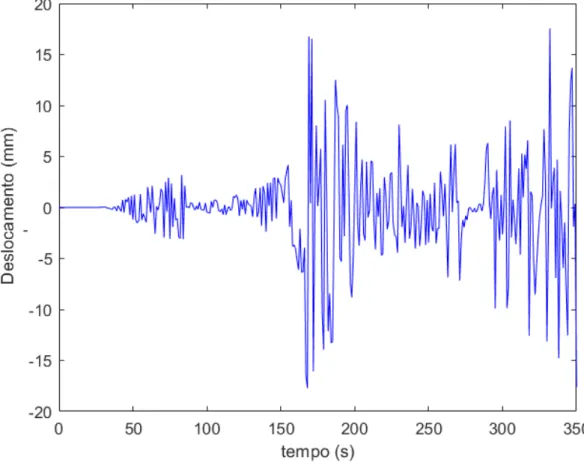
A Figura 6.5, que apresenta a resposta no tempo para a variável x, demonstrando que o início da captura do motor DC ocorre em cerca de 50 s. As amplitudes apresentam valores que diminuem gradativamente ao longo do tempo, apresentando após 220 segundos altos e baixos valores oscilatórios de amplitudes. A Figura 6.6 representa a variável y, que equivale ao deslocamento transversal da estrutura, nos mesmos instantes em que se observa a variável x, onde se observa um aumento das amplitudes de vibração em cerca de 120 s, que evolui para um aumento da constante picos de até cerca de 150 s.
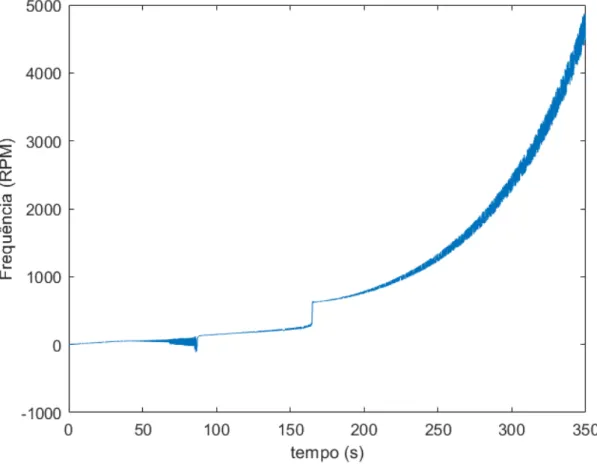
Um comportamento semelhante ao observado na Figura 6.5 é visualizado com o aumento das amplitudes de vibração de aprox. 50 s. Uma flutuação na velocidade angular é observada em aprox. 75 s, com aumento súbito, característico do efeito Sommerfeld, a aprox. 160 s, representado na Figura 6.8 por uma linha vertical.
Conclusões Sobre o Capítulo
COMPARAÇÕES ENTRE AS ANÁLISES NUMÉRICA E
Conclusões Sobre o Capítulo
Este capítulo permite concluir que o modelo físico utilizado para o desenvolvimento deste trabalho apresenta grande aderência ao modelo real devido ao comportamento semelhante das amplitudes de vibrações representadas ao longo do tempo, embora diferentes unidades técnicas sejam utilizadas. e movimentos longitudinais da estrutura.
CONCLUSÕES E TRABALHOS FUTUROS
SÚMULA CURRICULAR
Remarks on the passage through resonance of a two-degree-of-freedom vibrating system excited by a non-ideal energy source. Journal of Sound and Vibration, v. An insight into the occurrence of the sommerfeld effect and the saturation phenomenon in non-ideal vibrational systems (nis) at the macro and mems scales. Dynamic behavior of a cantilever beam coupled with a non-ideal unbalanced motor through numerical and experimental analysis.
Vibration control of a cantilever coupled to a non-ideal power source by coil impedance matching. On chaotic vibrations of a non-ideal system with two degrees of freedom: 1:2 resonance and sommerfeld effect.
![Figura A.1: Localização do Aplicativo Bússula [Desenvolvido pelo Autor]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17605001.4190567/71.892.276.614.152.752/figura-a-localização-aplicativo-bússula-desenvolvido-pelo-autor.webp)

![Figura 1.3: Fluxograma do Sistema de Recebimento, Preparo e Extração[Desenvolvido pelo Autor]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17605001.4190567/19.892.136.756.103.293/figura-fluxograma-sistema-recebimento-preparo-extração-desenvolvido-autor.webp)