Trabalho de conclusão de curso apresentado na Universidade Federal de Ouro Preto como parte dos requisitos para obtenção do título de bacharel em engenharia elétrica pelo Instituto de Ciências Exatas e Aplicadas da Universidade Federal de Ouro Preto. Após rodar as simulações em dois cenários, com e sem ruído, aplicadas a quadricópteros de diferentes tamanhos, as técnicas de controle estudadas apresentaram bons resultados, sendo o LQG o de melhor desempenho.
Histórico
Classificação
Os veículos aéreos são geralmente classificados de acordo com sua topologia como aeronaves de asa fixa (aviões), aeronaves de asa rotativa (helicópteros e multicópteros), entre outras (balões, dirigíveis, entre outros).
Aplicação
- Inspeção em linhas de transmissão de energia
- Busca e salvamento
- Mapeamento de ambientes
- Monitoramento
As VAANTs podem ser muito úteis em operações de busca e salvamento, utilizadas para escanear o ambiente, transportar equipamentos, coletar dados como a localização da vítima e até mesmo transportá-la para um local mais seguro. Exemplos dessas aplicações podem ser encontrados em (GHAZALI et al. 2019)), onde multirotores são utilizados para realizar busca e salvamento de pessoas e/ou animais, conforme ilustrado na Figura 5.

Motivação
Objetivos
Estrutura do trabalho
No capítulo 2 são apresentados os conceitos teóricos para identificação de sistemas, sistemas de controle e técnicas de controle. Essa combinação visa resumir as vantagens dos procedimentos de modelagem caixa branca e caixa preta (KARPLUS, 1977).
Representações de sistemas
Função de transferência
A função de transferência é uma função que relaciona algebricamente a saída de um sistema com sua entrada. O fundo do sistema é dado pela maior potência expressa no denominador da função de transferência (OGATA, 2011).
Espaço de estados
Se a função de transferência de um sistema não for conhecida, ela pode ser determinada experimentalmente com a ajuda de entradas conhecidas e do estudo das respectivas respostas do sistema. É possível representar a função em um diagrama de blocos, conforme a Figura 9, com a entrada à esquerda, a saída à direita e a função de transferência dentro do bloco.
Sistemas de controle
Sistema em malha aberta
Sistema em malha fechada
Projeto de sistemas de controle
Especificações de desempenho
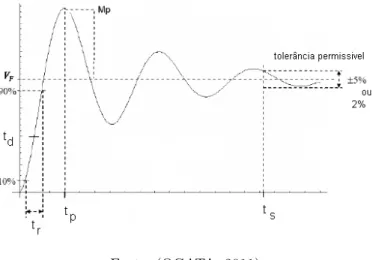
As condições necessárias de um sistema de controle são geralmente apresentadas como especificações de desempenho, geralmente declaradas em termos de resposta transitória e de estado estacionário, geralmente para uma entrada em degrau unitário. Mp - Overshoot máximo (em porcentagem): é o valor de pico máximo da curva de resposta medido a partir do valor unitário, para entradas padronizadas.
Técnicas de controle
Controle de estabilidade de quadotores
O trabalho de SHI et al. 2018) aponta uma comparação entre as técnicas de controle PD, Backstepping e Sliding Mode. Os trabalhos de BOAUBDALLAH e SIEGWART (2005) e ADIGBLI, MOURET e DONCIEUX (2007) apresentam uma comparação entre as técnicas de controle não linear Backstepping e Sliding Mode.
Modelagem matemática do VAANT
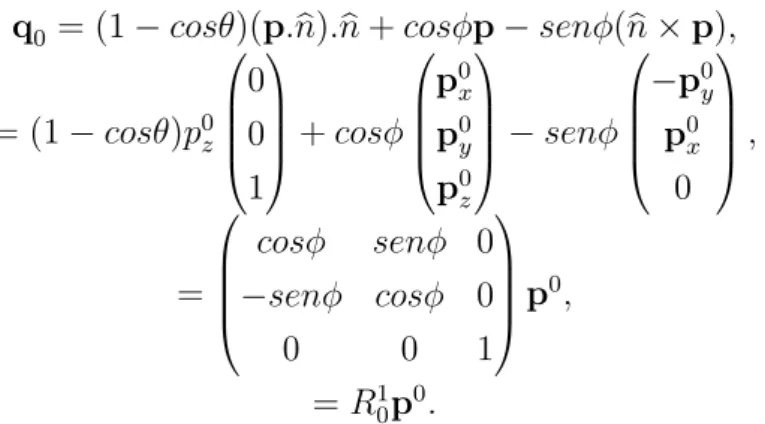
- Matrizes de rotação
- Sistema de coordenadas do quadrotor
- Referencial inercial F i
- Referencial inercial F v
- Referencial inercial F v1
- Referencial inercial F v2
- O referencial fixo ao corpo F b
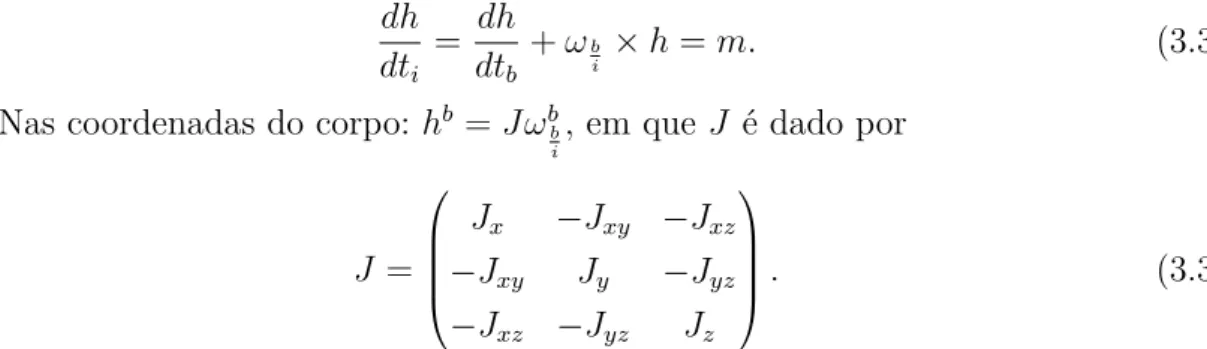
- Equação de Coriolis
- Cinemática e dinâmica
- Variáveis de estado do quadrotor
- Dinâmica dos corpos rígidos
- Forças e momentos
- Modelo matemático
- Modelo matemático simplificado
Por convenção, são assumidos os seguintes quadros: quadro inercial, quadro do veículo, quadro do veículo 1, quadro do veículo 2 e quadro preso à carroceria. O eixo x aponta para o norte, o eixo y aponta para o leste e o eixo z aponta para o centro da terra. O eixo x aponta para o norte, o eixo y aponta para o leste e o eixo z aponta para o centro da terra.
A origem do ponto de referência 1 do veículo é idêntica ao ponto de referência do veículo, ou seja, o centro de gravidade ou centro de massa. Este referencial é obtido girando o chassi do veículo 2 por um ângulo φ (inclinação), em termos da regra da mão direita, cerca de ˆiv2.

Técnicas de controle
- Controle PID
- Sintonia do controlador PID por Successive Loop Closure
- Sintonia do controlador PID pelo método Twiddle
- Sintonia do controlador LQR
- Sintonia do controlador LQG
- Filtro de Kalman
- Sintonia do controlador Lyapunov
- Definições matemáticas
- Segundo método de Lyapunov
- Verificação da estabilidade de Lyapunov para sistemas lineares e invariante no tempo 44
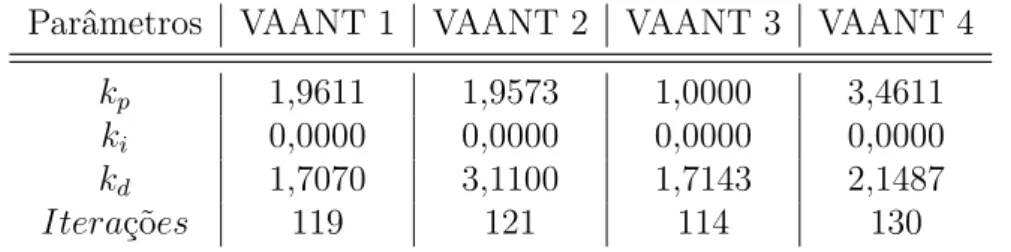
Para escolher kd, fixamos o valor de kp e consideramos ki = 0, torna-se a função de transferência em malha fechada do sistema da equação 3.60. 3.61). O modelo do sistema a ser controlado é dado pela equação 3.55, que representa a equação de movimento para o ângulo φ. Diferenciando a equação 3.73 e substituindo a equação do sistema em malha fechada (Equação 3.71) temos: 3.75) Observe que a última equação é preservada para todos os valores de x(t), portanto o tempo entre os colchetes deve ser zero.
Onde Ad, Bd, Cd e Bw,d são as representações discretizadas das matrizes A, B, C e Bw do sistema mostrado na Equação 3.80. Dado um sistema descrito pela equação 3.87, onde x é um vetor de n estados e f(x, t) é um conjunto cujos n elementos são funções dependentes de x e t.
Controle PID via Successive Loop Closure
Com a ferramenta Simulink é possível desenvolver um diagrama de blocos do circuito de controle PID, mostrado na Figura 29, no qual os parâmetros do quadrotor são aplicados para analisar o comportamento de cada quadrotor nos dois cenários. Como esse método de ajuste é realizado a partir dos limites de saturação dos atuadores, um aspecto importante a ser considerado no projeto é o esforço de controle necessário, que indicará se o sistema pode ou não atender a especificações rígidas, que exigem muito desempenho. resposta dinâmica dos sistemas. Como pode ser visto, no projeto do controlador os limites dos atuadores foram pré-determinados para calcular os benefícios desta técnica de controle.
Para validar esta informação, o esforço de controle é usado para verificar se os atuadores estão realmente saturados. Para isso, avaliando inicialmente o eixo x, utiliza-se o mesmo sinal de entrada padrão para este trabalho, porém com amplitude igual a 100o, valor que se refere à variação máxima permitida, e considerando a resposta do esforço de controle para estes quatro VAANTs, pode-se constatar que o controle não irá saturar o atuador, conforme a figura 31.
Controle PID via Twiddle
Sabe-se que o ângulo de movimento no eixo x é de até 100o, e isso exige que o atuador receba um sinal de entrada PWM com variação de até 700µs. O teste do eixo z foi realizado de forma semelhante, mas o sinal de entrada tinha amplitude de 360° e a resposta, mostrada na Figura 32, também apresenta um comportamento que leva à não saturação dos atuadores. Por fim, o IAE apresenta valores muito altos, indicando que existe uma diferença significativa entre o sinal de saída e a referência.
O erro de estado estacionário para todos os quadricópteros é zero, o que significa que, com o tempo, a saída atinge e permanece na mesma amplitude do sinal de entrada. Por fim, IAE é a área da diferença entre o sinal de saída e o sinal de entrada, então quanto menor o valor, mais igual será a saída do sinal de entrada, neste caso os quadrotores não tiveram baixas velocidades, como esperado, quando comparados aos nas demais técnicas, porém, vale ressaltar, que este método visa minimizar o valor de IAE para atingir os ganhos do controlador.
Controle via LQR
De maneira geral, o tempo de resposta dos quadrotrees é bom, sendo o VAANT 4 o de melhor desempenho, fator benéfico quando se deseja uma resposta mais rápida do sistema, considerando todos os parâmetros de desempenho relacionados ao tempo do drive. Assim, a Tabela 12 apresenta os valores de lucro calculados para todas as VAANTs em estudo. Com base nessas respostas, é possível destacar os seguintes parâmetros de desempenho dos sistemas mostrados na Tabela 14.
Todos possuem erro em regime permanente igual a 0o, ou seja, em regime permanente a saída atinge a mesma amplitude da referência. O IAE é baixo para os quadrotores, indicando que a saída desse quadrotor é mais parecida com o sinal de referência.

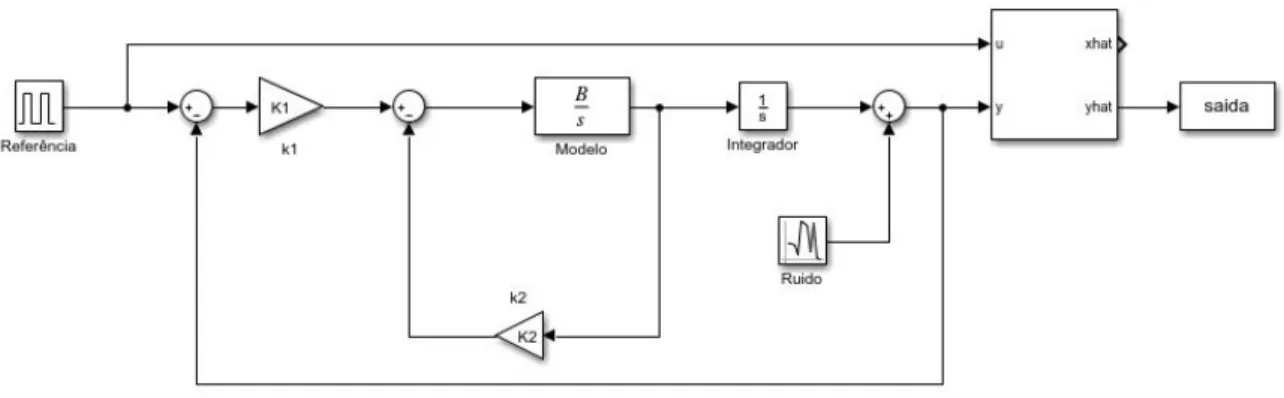
Controle via LQG
Uma grande questão discutida em projetos de controle via LQR são as matrizes Qk e Rk, pois são as matrizes de covariância dos ruídos implementadas no sistema, porém esses valores são desconhecidos na prática. Como o sistema de controle LQG é uma melhoria do sistema LQR, onde o objetivo é atenuar a interferência de ruídos no sistema, o diagrama de blocos do controle LQG e LQR são semelhantes, sendo a diferença a adição do filtro de Kalman. Os ganhos k1 e k2 são os mesmos usados no controle LQR, a diferença são os parâmetros do bloco Fiter Kalman que requer as matrizes de espaço de estados do modelo e as matrizes Qk e Rk.
O erro de estado estacionário foi insignificante para este estudo, então a saída é equivalente ao sinal de entrada, em estado estacionário. Para o IAE, os valores encontrados são baixos, o que significa que o comportamento da saída é mais parecido com o sinal de entrada.
Controle via Lyapunov
É necessário que ˙V(x) seja definido negativamente para garantir a estabilidade assintótica do sistema, para isso a entrada de controle é escolhida como. Observe que a função de transferência em malha fechada do sistema, vista na Equação 4.19, é semelhante a uma função de transferência canônica de segunda ordem. Para realizar o controle pela técnica de controle de estabilidade de Lyapunov, utiliza-se o diagrama de blocos mostrado na Figura 38.
Examinando o overshoot máximo, nota-se que os valores são baixos com exceção da VAANT 2, que apresenta grande discrepância em relação às demais. A velocidade de resposta do sistema é rápida ao analisar os tempos de lag, rise, pico e acomodação, exceto pelo tempo de acomodação do VAANT 2, que é significativamente maior que os demais, implicando em um atraso para entrar no estado estacionário.

Análise comparativa entre as técnicas de controle
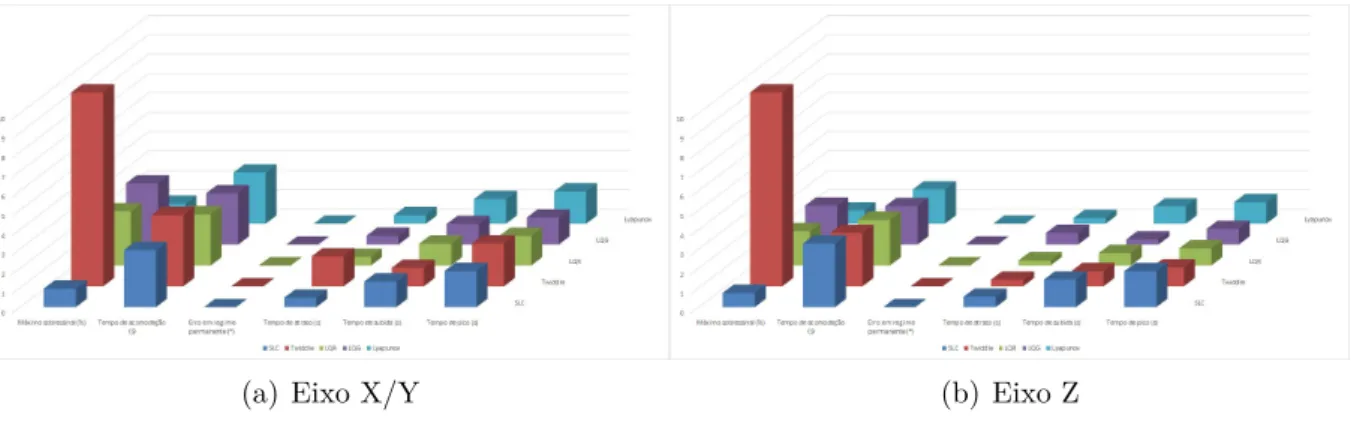
Em relação à velocidade de resposta, para VAANT 2 e 3 as técnicas LQR e LQG obtiveram melhores resultados, enquanto para VAANT 4 a técnica de controle baseada na estabilidade de Lyapunov obteve melhor desempenho. A Figura 41 exibe a faixa IAE de todas as técnicas de controle para os quadrotors relevantes. Para aplicar as técnicas de controle estudadas, a modelagem matemática do quadrotor é fundamental.
Por meio de simulações em dois cenários, com e sem ruído, observa-se se as técnicas de controle atingem os objetivos propostos por cada técnica. Com relação às técnicas de controle utilizadas, todas obtiveram bons resultados, pois os sistemas convergiram para a estabilidade em todos os casos.
Trabalhos futuros
Em relação ao funcionamento dos atuadores, a técnica que obteve os melhores resultados proporcionando segurança quanto aos valores máximos e mínimos permitidos de operação foi a técnica PID com fechamento sequencial do loop e Lyapunov, ambas com valores muito semelhantes. A escolha da técnica a ser utilizada depende do desempenho desejado do sistema, mas em geral, ao analisar os parâmetros de desempenho presentes no texto e utilizar o quadrotor em ambientes ruidosos, a melhor técnica analisada nas quatro VAANTs foi o controle LQG. uma técnica que, além do menor erro médio de resposta e índices de desempenho satisfatórios, também é responsável por uma redução significativa na interferência de ruídos. A seguir são apresentadas simulações referentes a outras VAANTs para cada técnica de controle utilizada, bem como as medidas de desempenho alcançadas em cada aeronave para o eixo de guinada.
PID - Successive Loop Closure
PID - Twiddle
LQR
LQG
Lyapunov
Comparação entre as técnicas
Attitude stabilization of uav quadrotor using fuzzy backstepping logic and least mean square controller. Detailed technology research of autonomous inspection of uav multi-rotor transmission lines based on path planning.