O impacto da função prejudicada das mãos e dos membros superiores provoca grandes desafios no cotidiano dos indivíduos que sobrevivem, dada a sua importância para a autonomia e o desempenho de tarefas simples do cotidiano, como o manuseio de objetos (AMERICAN STROKE ASSOCIATION, 2021; MORITZ et. al. ., 1997). Devido a esse aspecto, muitas vezes os indivíduos se sentem menos motivados para realizar o tratamento de longo prazo (BERTON et al., 2021; GOLOMB et al., 2010; HOLDEN; DYAR; DAYAN-CIMADORO, 2007).

OBJETIVO PRINCIPAL
OBJETIVOS SECUNDÁRIOS
A neuroprótese citada na lista é composta por um dispositivo vestível composto por uma órtese física, um conjunto de oito eletrodos para estimulação elétrica e um microcontrolador responsável por controlar o funcionamento do aparelho. Este dispositivo tem como objetivo auxiliar no tratamento de reabilitação por meio de Estimulação Elétrica Funcional (FES).
ACIDENTE VASCULAR CEREBRAL E COMPROMETIMENTO MOTOR . 21
O algoritmo Adaptive Weighting Regression (AWR) consiste em um modelo preditivo para detecção de pontos-chave manuais (HUANG et al., 2020). A Figura 2 mostra uma ilustração do fluxo de processamento realizado pelo modelo para estimar pontos-chave em uma imagem de profundidade.
REABILITAÇÃO
Essa unidade também possuía um objeto sensorizado em forma de bloco retangular utilizado para medir a força atuante em sua pegada. Dois médicos foram solicitados a preencher um questionário de 10 itens para avaliar o desempenho dos pacientes nos exercícios, durante o qual a precisão do movimento e a postura foram avaliadas para cada segmento corporal.

PROCESSAMENTO DE IMAGENS
Dentre os diversos algoritmos desenvolvidos nessas áreas, um ganhou importância porque permite a identificação de diferentes partes do corpo humano (face, mãos, pés, além das principais articulações do tronco e membros) em tempo real e por meio de um câmera simples (RGB), é um algoritmo conhecido como OpenPose, publicado por Cao et al. 2021) e possui versão open source publicada no GitHub (serviço em nuvem para hospedagem gratuita de repositórios de código-fonte). O erro médio para cada junta em cada pórtico e a média de todos os pórticos de teste, 2) a razão entre o número de juntas dentro do limite de erro e 3) a proporção de pórticos contendo todas as juntas dentro do limite de distância da posição real (KIM e outros, 2017). O modelo proposto por Huang et al. 2020) se destacou dos demais por superar as deficiências apresentadas pelos métodos baseados em detecção e regressão ao combinar as duas estratégias, além de utilizar uma técnica de integração discreta em todos os pixels da imagem, o que permite obter coordenadas conjuntas com o auxílio de mapas de pesos adaptativos .
Este capítulo apresenta em linhas gerais o panorama global dos principais componentes e arquitetura da plataforma, na qual está inserida a proposta elaborada neste projeto para a criação do módulo de monitoramento da evolução do paciente.

SISTEMAS AUXILIARES
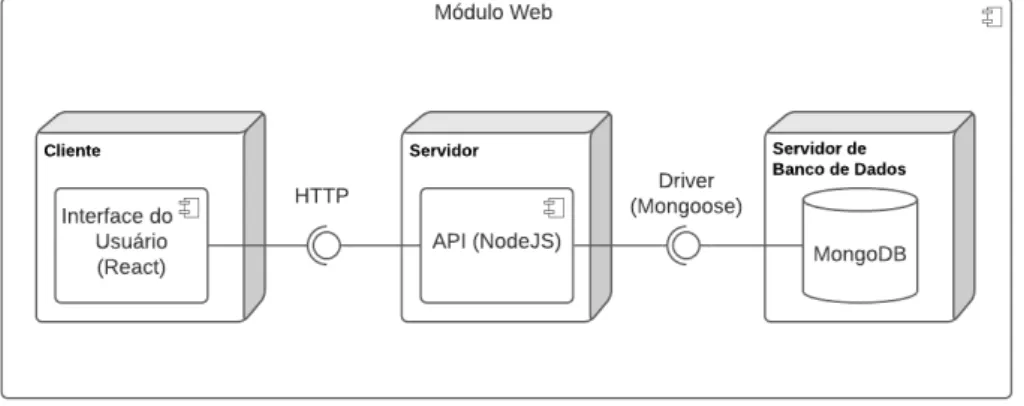
Módulo Web
Cada item de menu consiste em um ícone acompanhado por um nome que indica a tela de destino. É permitido adicionar novos pacientes através do CPF, excluir um paciente e alterar os dados do perfil do paciente. Dada a impossibilidade de adicionar um menu lateral para navegação, foi adicionado um botão em todas as telas para permitir ao paciente cancelar a operação acessada e retornar ao menu inicial do aplicativo.
A Figura 15 mostra algumas das telas implementadas para seleção da cirurgia e acompanhamento da sessão pelo paciente visualizadas através de um dispositivo móvel.
Sistema de Realidade Virtual
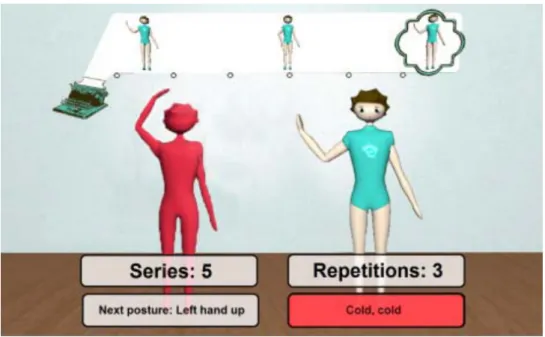
Depois de pronto o ambiente da cozinha, foram acrescentados objetos para interações nas atividades propostas, como uma garrafa na geladeira e um copo, para o usuário pegar a garrafa com a palma da mão e levar até o copo para encher isto. it.. Foram testadas três formas de interação do usuário com objetos no ambiente virtual, a primeira HPTK Posing & Snapping, que foi disponibilizada gratuitamente pelo desenvolvedor Jorge J González para fins de pesquisa, mas não pôde ser utilizada devido à configuração da conta Asset para outros headsets VR diferentes dos utilizados neste trabalho, o que poderia dificultar a integração com o HTC Vive. Por se tratar de um sistema de reabilitação motora que utiliza estimulador neuromuscular para realizar movimentos de compressão, o ambiente de treinamento do paciente Unity deve se comunicar com o estimulador e enviar um sinal sincronístico ao aplicativo de comando do estimulador indicando qual movimento realizar a atividade.
Foi implementada uma integração entre o sistema VR e o módulo web, descrita na seção 6.1.1, para permitir o envio de comandos do ambiente imersivo para o estimulador.

DETALHAMENTO DA ARQUITETURA
Detalhamento da Comunicação da Plataforma
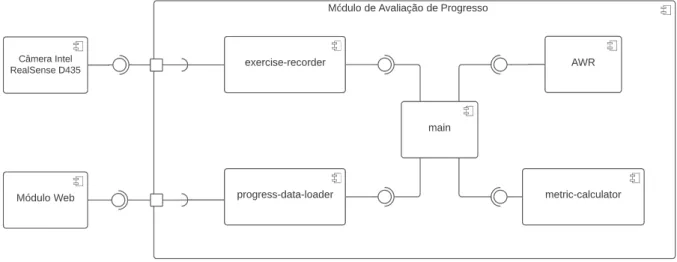
Para facilitar a distinção entre os tipos de comunicação utilizados, o diagrama de comunicação utiliza setas sólidas para representar chamadas e locais de métodos diretos, e setas pontilhadas para representar chamadas a sistemas remotos, utilizando o protocolo HTTP. Os módulos foram amplamente integrados por meio de chamadas de métodos locais usando interfaces de comunicação bem definidas entre os componentes. Para fornecer uma interface de comunicação externa com o algoritmo, foi implementada uma camada de comunicação sobre o protocolo HTTP utilizando a biblioteca flask, que permite criar servidores web para recebimento e envio de solicitações utilizando este protocolo.
Além do módulo AWR, também foi necessária a utilização de comunicação HTTP entre o módulo principal e o módulo web, uma vez que o segundo está hospedado em um serviço externo, podendo ser acessado remotamente pelos profissionais de saúde e pacientes nele cadastrados.

PROPOSTA EXPERIMENTAL
- Motivação para a análise de posicionamento e iluminação
- Coleta de dados
- Estudo de condições ideais para uso da plataforma - (A)
- Validação da aplicabilidade da plataforma como ferramenta para quantifi-
O roteiro consistia em tirar fotos em 9 condições de posicionamento diferentes, combinando 3 variações de distância entre a mão do usuário que foi capturada e a câmera (28cm, 35cm e 37cm) e 3 variações de posição relativa do sistema "voluntário-câmera". para a fonte de luz ambiente. Para quantificar a melhor configuração de utilização da câmera, foi desenvolvido um algoritmo que lê e processa as imagens capturadas e compara os resultados antes e depois do processamento para identificar a configuração que promoveu menos erros de captura. Conforme discutido na Seção 6.3.2, para cada uma das 9 configurações de posicionamento, os voluntários realizaram uma pegada padrão ouro com a mão esquerda realizando um movimento completo de abertura da mão e com a mão direita, para acompanhamento, realizaram 3 sequências de 4 movimentos , cada movimento é uma implementação parcial de uma abertura manual com amplitudes diferentes.
Este capítulo apresenta os resultados obtidos em cada uma dessas etapas e está organizado da seguinte forma: a Seção 7.1 detalha as versões finais dos módulos implementados e descreve os pontos mais relevantes do seu fluxo de processamento, e a Seção 7.2 apresenta os resultados obtidos nos experimentos. realizado para analisar a aplicabilidade do sistema.

MÓDULOS DO SISTEMA
Exercise Recorder
O algoritmo de captura de imagem usa duas fontes de streaming lirealsense; o primeiro para capturar quadros RGB para facilitar a visualização da imagem e o segundo para adquirir dados do sensor de profundidade. A imagem à esquerda mostra os dados RGB dos pixels dentro do limite do filtro, e a imagem à direita mostra os dados capturados pelo sensor de profundidade após a aplicação de um mapa de cores. A segunda imagem mostra que os pontos ao redor dos objetos mais próximos da câmera aparecem em tons mais escuros porque a câmera não consegue capturar a nuvem de pontos do sensor de profundidade nesses pixels.
Para mitigar a ocorrência desse tipo de falha na captura de imagens de profundidade e melhorar a precisão na detecção de bordas, foram aplicados filtros de pré-processamento nos dados de entrada.

AWR
Imagens de profundidade capturadas em perspectiva frontal foram utilizadas para treinar o modelo AWR, e 14 dos 36 pontos foram utilizados para treinamento e predição. Conforme descrito anteriormente, o modelo foi analisado para familiarização com o código-fonte implementado, o que permitiu modificá-lo para tratar os dados capturados pelo módulo gravador de exercícios. A customização deste módulo foi feita em três fases: criação do algoritmo de carregamento de dados do modelo; criação da interface para recebimento de dados em tempo real e modificação do script de teste do modelo para facilitar as previsões.
O algoritmo adaptado também utiliza os parâmetros do modelo pré-treinado baseado na NYU para prever os pontos; porém, não realiza as seções de cálculo de erros, pois as imagens captadas pelo módulo anterior não possuem anotações manuais das coordenadas reais.

Metric Calculator
A Figura 40 mostra um exemplo do resultado do processamento do módulo AWR para um conjunto de imagens capturadas pelo gravador de exercícios. Neste cenário, a biblioteca numpy foi utilizada para gerar pontos-chave com valores aleatórios utilizando a mesma estrutura de dados derivada do módulo AWR. São criados dois casos de teste para validação, um para validar o resultado do MPJPE ideal resultando em zero para duas entradas com os mesmos pontos, e outro para validar que a métrica seria maior que zero para pontos diferentes.
Como foram implementados testes unitários específicos para validar o valor exato, esta validação não foi necessária no teste funcional.
Sistema Web
A Figura 42 mostra um exemplo de chamada para esta rota feita pela ferramenta Insomnia, software de simulação de cliente e validação de chamadas HTTP. A Figura 43 mostra o registro criado no banco de dados MongoDb, que consiste em um documento no formato JSON. Os registros de acompanhamento podem ser recuperados do servidor por meio de outra rota HTTPGET /follow-up/all/:therapistPatient, onde terapeutaPatient é o identificador exclusivo do relacionamento profissional de saúde e paciente.
Por fim, foi adicionado um gráfico interativo à interface gráfica do sistema, que permite selecionar o exercício e filtrar por data para visualizar os valores da métrica.

Main
- Interface de Linha de Comando (CLI)
Duas interfaces foram desenvolvidas para utilização do módulo principal; a primeira, descrita na Seção 7.1.5.1, é uma interface de linha de comando para utilização através do terminal do sistema operacional (SO), enquanto a segunda, descrita na Seção 7.1.5.2, é uma interface gráfica, que permite a configuração e o sistema inicialização de maneira semelhante. A Interface de Linha de Comando (CLI) do Módulo de Acompanhamento de Progresso permite a configuração do sistema passando parâmetros para o programa Python, que são lidos por meio da biblioteca argparse nativa. O arquivo deve conter uma variável de ambiente chamada AWR_URL e a URL de conexão. A Figura 50 mostra um exemplo de configuração desta variável apontando para uma URL dinâmica gerada pelo flask-ngrok.
A Figura 51 mostra um exemplo de como o arquivo executável, seu arquivo de configuração e sua pasta de imagens são armazenados no sistema de arquivos de uma máquina Windows.
EXPERIMENTOS
ILUMINAÇÃO E POSICIONAMENTO
De forma análoga, a Tabela 4 apresenta o resultado da métrica RMSE agrupada por configuração de iluminação utilizada para registro. A Figura 53 mostra a dispersão dos dados RMSE em um box plot agrupado por configuração de luz. Por fim, a Tabela 5 mostra os resultados do RMSE agrupados por configuração de distância entre a mão do voluntário e a câmera, e a Figura 54 mostra a dispersão desses dados em um box plot, agrupados por configuração de distância.

FUNCIONAL
Conforme verificado no experimento anterior, os valores de MPJPE também apresentaram distribuições semelhantes em todas as configurações de iluminação (tabela 7 e figura 56). Também foram analisados os valores individuais do MPJPE do PSQM para cada voluntário e, como pode ser observado na Figura 58, percebe-se que para os voluntários 1 e 2, cada PSQM possui espaços bem definidos. Porém, pode-se observar que o sistema foi capaz de inferir o posicionamento dos nós e calcular os valores de MPJPE correspondentes à qualidade esperada para essas execuções.
Vale ressaltar também que o sistema apresentou valores proporcionais de MPJPE do PSQM mesmo para voluntários com mãos diferentes (Tabela 1 e Figura 58), o que sugere que o sistema não apresenta resultados tendenciosos com base na mão dominante do usuário utilizando isto. .