À Empresa Júnior de Controle e Automação (Automic Jr) pelas amizades e pela oportunidade de ver a Engenharia de forma prática, inovadora e muito próxima do mercado de trabalho. Este trabalho consiste no desenvolvimento e aprimoramento de uma bancada didática de baixo custo para auxiliar os alunos no processo de aprendizagem na disciplina de teoria de controle.
Objetivos gerais e específicos
A ferramenta didática apresentada neste trabalho consiste em: um túnel de acrílico de seção retangular, no qual a ventilação é forçada por meio de um miniventilador (resfriador); uma lâmpada halógena; quatro sensores de temperatura; e um circuito eletrônico com uma placa de desenvolvimento Arduino Nano, que se comunica serialmente com um sistema supervisório para realizar práticas de controle de temperatura em malha fechada por meio da manipulação da velocidade do cooler. dados seriais UART;.
Justificativa do trabalho
Estrutura do trabalho
Nesse contexto, o operador possui uma grande quantidade de malhas de controle e as controla por meio de uma tela de computador. Neste projeto foi desenvolvido um sistema de controle automático de temperatura de baixo custo para auxiliar no ensino da teoria de controle, através de aulas práticas na disciplina de Microcontroladores aplicados à engenharia de controle e automação, utilizando um controlador PI utilizando um sistema de supervisão.
Sistemas Embarcados
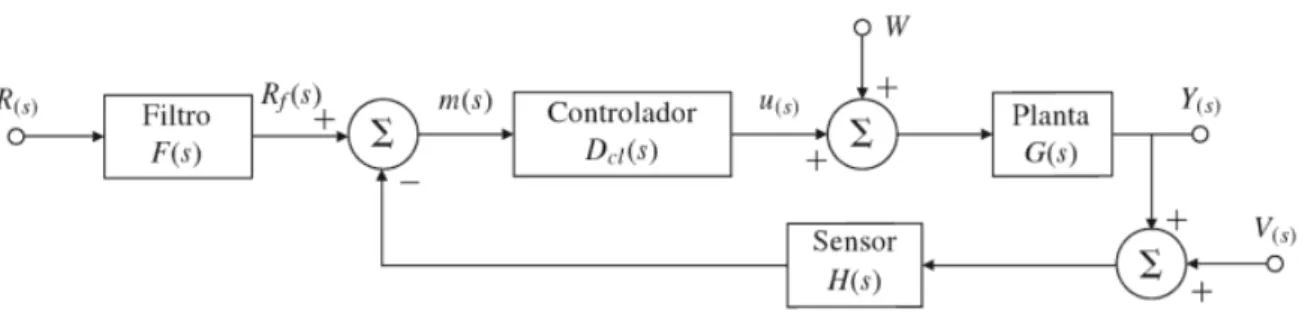
Pode-se dizer que existe a necessidade de um “cérebro” que controle todo o funcionamento deste sistema. A Figura 2 mostra o diagrama de blocos básico de um sistema embarcado que controla alguma variável ambiental, como temperatura, umidade ou pH do ar em uma estufa, sala ou depósito (CHASE; ALMEIDA, 2007).
Arduino
Neste projeto foi realizada a construção de um sistema embarcado, onde o código de um controlador PID foi embarcado na programação da plataforma Arduino Nano, tornando-o projetado exclusivamente para controle de temperatura do sistema. O Arduino Nano é uma versão menor do Arduino, semelhante ao Arduino Uno por possuir um chip ATMega328 na versão Surface Mount Device (SMD).

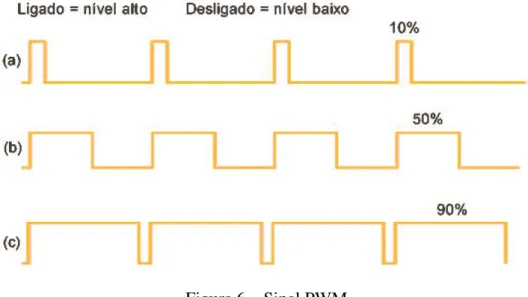
PWM
Outro exemplo de circuito simples que pode ser controlado via PWM é o circuito com LED alimentado por bateria de 9 V, conforme a Figura 7. Repetindo este ciclo 10 vezes por segundo, o LED acenderá como se estivesse conectado com uma bateria de 4,5 V (meio 9 V).
Transistor Darlington TIP 122
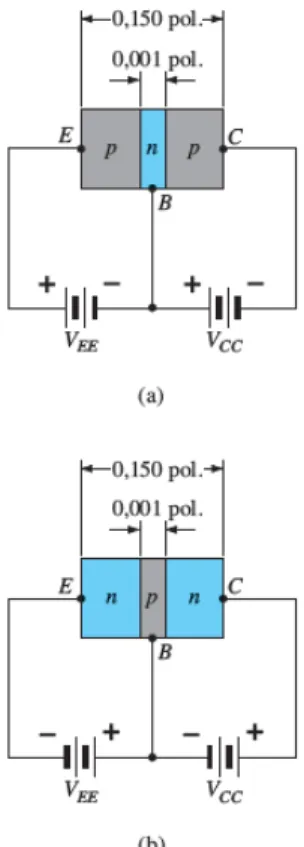
Existem dois materiais extrínsecos de grande importância para a fabricação de um dispositivo semicondutor: materiais tipo n e tipo p. Ambos os materiais do tipo n e do tipo p são formados pela adição de um número predeterminado de átomos de impureza a uma base de silício. O material do tipo p é formado pela dopagem de um cristal puro de germânio ou silício com átomos impuros que possuem três elétrons de valência.
Lâmpada Halógena
Cooler
Sensor de temperatura LM35
O LM35 consiste em um sensor de precisão que gera uma saída de tensão linear proporcional à temperatura em que se encontra, de modo que sua saída é um sinal de 10mV para cada 1oC de temperatura. Nenhuma calibração externa é necessária para que o LM35 forneça com precisão valores de temperatura com variações de 14 ou mesmo 34oC dentro da faixa de temperatura entre -55 e 150oC. Pode ser utilizado de duas formas: com alimentação simples ou simétrica, dependendo do objetivo desejado com o sinal de saída, mas independente dessas formas, a saída ainda será de 10 mVoC (SILVEIRA, 2019).
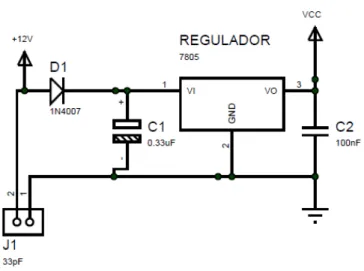
Regulador de Tensão LM7805
Segundo Silveira (2019), o sensor LM35 possui as seguintes especificações: .. e) baixa impedância de saída. com outros componentes para obter tensões e correntes ajustáveis. O regulador de tensão LM7805 foi utilizado neste projeto para regular a tensão de saída de 12 V da fonte de alimentação para 5 V, para alimentar os 4 sensores de temperatura LM35.
Proteus
Visual Studio
Tipos de Comunicação
Comunicação paralela
As linhas de sinal são divididas em 8 linhas de dados, 5 linhas de status e 4 linhas de controle, que possibilitam o fluxo de informações do computador para os periféricos, pois cada registro é comandado pelo software (REIMBOLD; RASIA; WEBER, 2000).
Comunicação serial
PARITY ERROR Output Indica se um erro de paridade foi detectado durante a recepção do pacote de dados. FRAME ERROR Output Indica que o formato de dados enviado da entrada serial para rx não corresponde ao formato de dados UART correto. DADOS (8 bits de dados - 7 a 0) Entrada/Saída Barramento de dados bidirecional para enviar/receber dados via UART.
Sistemas de controle
Sistemas de controle digital
Sua grande vantagem é que é possível controlar várias meshes pelo mesmo computador através do time sharing. Você pode fazer o ajuste desejado nos parâmetros do controlador para produzir a saída desejada por meio de alterações de software em vez de hardware. Portanto, o código de programação do controlador PID embarcado na plataforma Arduino Nano e utilizando o sistema de supervisão para monitorar o comportamento da temperatura e controlá-la conforme desejado (NISE;.
Controlador PID
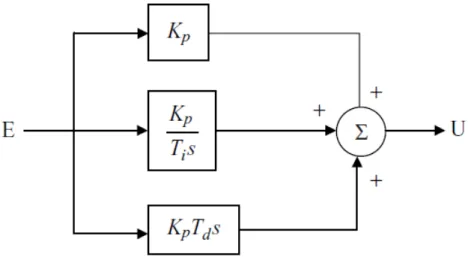
A Figura 24 mostra o diagrama de blocos do controlador PID de tempo contínuo, onde E representa seu sinal de entrada e U sua saída (IBRAHIM, 2006, p. 230–231). Para implementar o controlador PID usando um computador digital, é necessário converter a Equação 3.1 da representação contínua para a representação discreta. A fórmula do controlador PID fornecida pela Equação 3.9 está pronta para ser implementada em um computador digital.
Identificação de sistemas
Identificação pelo método da curva de reação
Segundo Goodwin, Graebe e Salgado (2000, p) para aplicar o método, o valor de saída do sistema em malha aberta deve estar em estado estacionário, conforme representado por y0 na Figura 25. Nessa situação, um degrau (de 10 por 20 ) % do fundo de escala) na entrada em um dado instante (t0) Assim, para Goodwin, Graebe e Salgado (2000, p é possível encontrar a função de transferência de um sistema de primeira ordem com atraso, conforme a Equação 3.14 ( modificado) .):.
Métodos de Sintonia para Controladores PI
Método Ziegler-Nichols
Método Cohen-Coon
Método CHR
Este foi o primeiro estudo publicado que possui regras para sintonizar controladores, através de testes práticos realizados com inovação e simplicidade. As Tabelas 2 e 3 mostram os cálculos de ganho proporcional (Kp) e tempo integral (Ti) para os métodos de sintonia do controlador PI mencionados anteriormente, usando os parâmetros τ e θ obtidos pelo teste da curva de resposta, (MATOS et al., 2019). Nas Tabelas 2 e 3, τ é a constante de tempo (s),θ, o tempo morto ou tempo de atraso (s), Kdc, o ganho direto e λ, o parâmetro que define a rapidez com que a saída do sistema segue o valor de referência ( MATOS et al., 2019).
Projeto do circuito eletrônico
- Plataforma Arduino
- Sensores de temperatura LM35
- Circuito eletrônico do cooler
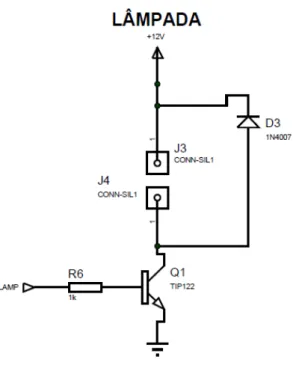
- Circuito eletrônico de aquecimento
- Circuito de alimentação do sistema
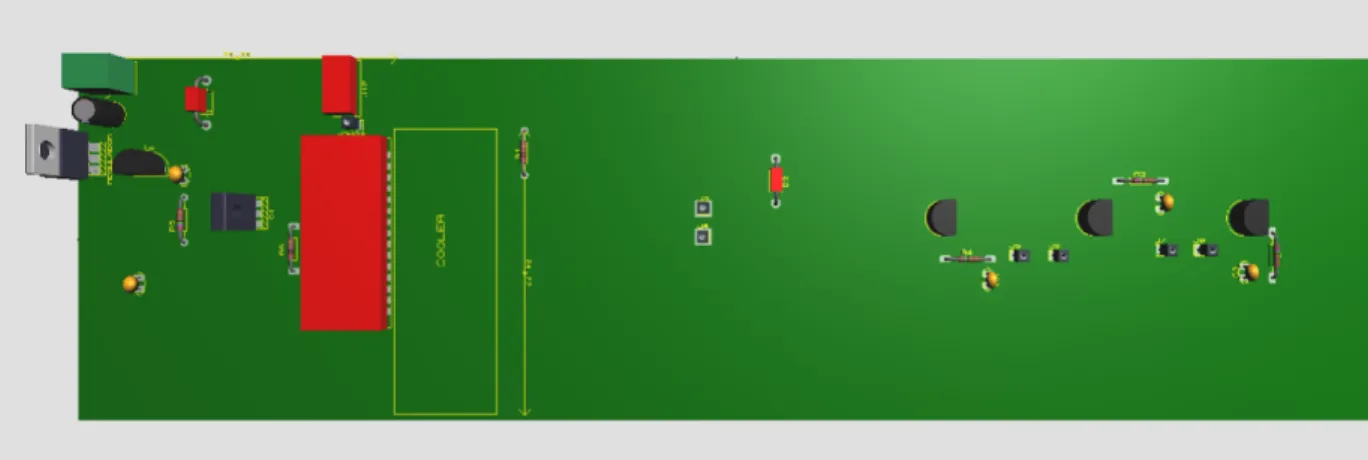
- Placa de circuito impresso
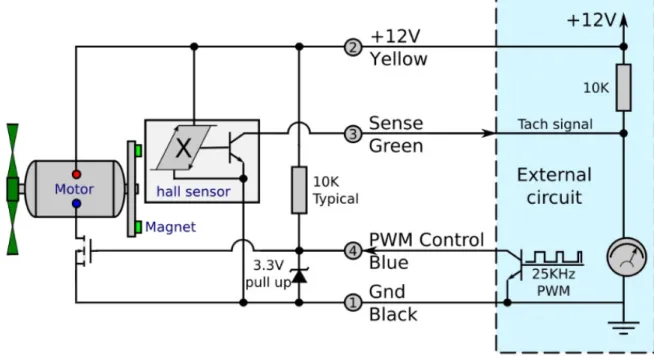
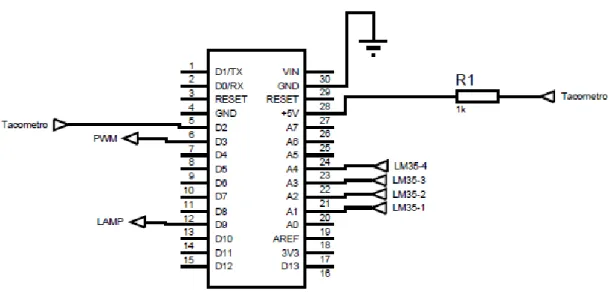
O cabo do tacômetro do cooler foi conectado à caixa digital 2 (D2), que foi conectada a um resistor pull-up de 1 kΩ (R1) conectado à caixa de +5 V do Arduino, com o objetivo de filtrar a rotação do mini- fã. sinal. Seu circuito é composto por dois capacitores ligados em paralelo (C1 e C2) para ajudar a regular a tensão de 12 a 5 V (VCC), para alimentação dos 4 sensores de temperatura LM35. A Figura 32 mostra o sistema completo implementado no software Proteus e as Figuras 33 e 34 mostram as vistas tridimensionais superior e lateral da placa desenvolvida.
Programação da plataforma Arduino Nano
Modo manual
O modo manual garante que o miniventilador e a lâmpada sejam ativados por um sinal de controle PWM, emitido pelo usuário através do software de supervisão. Este modo foi utilizado para obter resultados usando o método da curva de resposta de Ziegler-Nichols e permite ao usuário selecionar manualmente o nível de ventilação e aquecimento do sistema.
Modo automático
A programação do controlador PID implementado na plataforma Arduino Nano é composta pelas seguintes etapas: .. a) recebe-se do supervisor a temperatura do sensor utilizado no controle PID;. Após esse passo a passo, o valor final do PID é encontrado somando os três termos a 26, pois é o valor da velocidade inicial (0 V) do miniventilador (PID = P + I + D + 26); . d) o valor do PID é: sempre limitado à faixa de valores de 26 a 79, para corresponder à faixa de operação do sinal PWM docooler; e ajustado nele para que atue no sistema regulando a temperatura e aproximando-a o mais possível do valor (set point) desejado pelo usuário.
O sistema supervisório
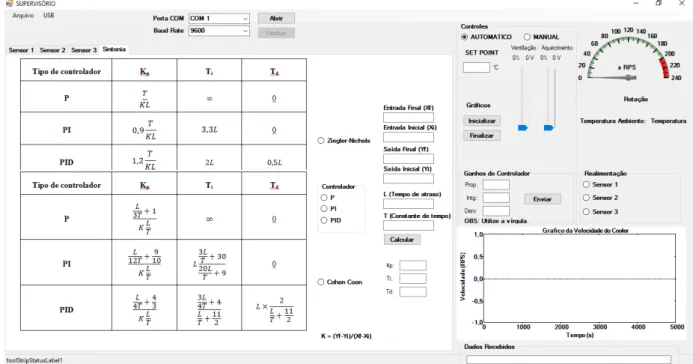
O sistema funciona da seguinte forma: .. a) primeiro inicie a comunicação serial, selecionando a porta serial "COM" do computador e a velocidade de transmissão de dados "Baud Rate" de 9600, pressionando o botão .. b) com a comunicação serial estabelecida , os valores de temperatura e a rotação por segundo do mini ventilador serão recebidos pelo Arduino e exibidos em gráficos e indicadores analógicos, e se o modo automático estiver ativado, o gráfico de erro mostrará os valores de diferença entre o conjunto apontar. e a temperatura de cada sensor; Depois de encontrar os parâmetros da curva de realimentação (Entradas finais e iniciais (Xf e Xi), Saídas finais e iniciais (Yf e Yi), Tempo de atraso (L) e Constante de tempo (T)), insira-os no supervisor da guia de ajuste. escolha entre os métodos Ziegler-Nichols e Cohen-Coon e entre os controladores P, PI e PID e pressione o botão "Calcular", obterá o ganho proporcional (Kp), tempo integral (Ti) e tempo derivativo (Td ). Uma vez encontrados esses parâmetros, ele consegue determinar os outros dois ganhos do controlador, e inserindo os três ganhos na aba inicial e pressionando o botão "Enviar", os ganhos serão enviados para o Arduino, que calcula o valor do PID e atua de acordo com a regulação de tensão aplicada ao miniventilador, controlando automaticamente o nível de ventilação, que regula a temperatura no túnel de vento; .. e) o supervisor possui 4 abas, sendo 3 para monitorar o comportamento de cada sensor e velocidade do ventilador e 1 para sintonizar o controlador PID; .. f) na caixa de texto "Dados recebidos" você pode ver os dados vindos da serial, enviados pelo Arduino.
Construção física da bancada
Neste trabalho, a identificação do sistema foi realizada por meio da construção da curva de resposta para determinar os parâmetros necessários para a sintonia do controlador nos quatro métodos aproximados. Calculando esses parâmetros e aplicando as equações e fórmulas das Tabelas 2 e 3, foi possível projetar o controlador PI e obter os resultados do experimento. Após isso, foi possível encontrar a função de transferência do controlador e sua modelagem discreta, de acordo com cada método.

Identificação do sistema e sintonia de controladores
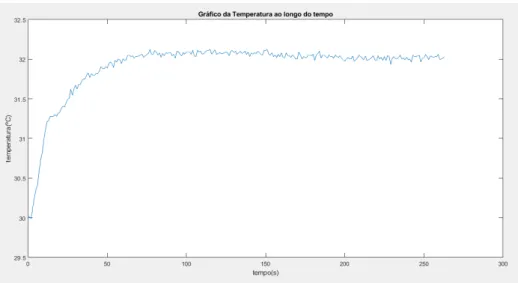
Construção da curva de reação
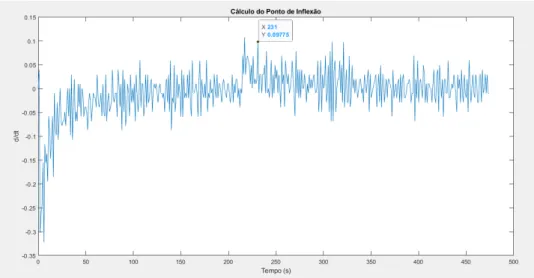
Para a construção da curva de reação, segundo Oliveira et al. (2018), encontra-se o ponto de inflexão, que geralmente é o ponto mais alto (derivada máxima) após o momento do degrau. Como o ponto mais alto após o momento do degrau é o tempo 231 s, que foi o ponto de inflexão selecionado, foi utilizado o valor da derivada de 0,09775. Porém, como não é possível enviar um sinal de controle negativo já que a tensão de alimentação do miniventilador é positiva, a realimentação do sistema deve ser positiva, ao contrário do que é mostrado na Figura 23, pois só assim o sistema em malha fechada ficaria estável (MATOS et al., 2019).
Identificação do sistema e projeto do controlador PI
Teste e validação do sistema
- Método de Ziegler-Nichols
- Método de Cohen-Coon
- Método de Chien, Hrones e Reswick
- Método do Modelo interno
- Validação do sistema
O funcionamento do controlador é mostrado na Figura 48, que contém um gráfico do erro de temperatura durante o experimento, e pode-se observar que em cerca de 105 s o erro foi praticamente zero, o que significa que o sistema chegou muito próximo do desejado. temperatura (32oC). Você pode visualizar o funcionamento do regulador na Figura 56, onde é mostrado o gráfico do erro de temperatura durante o experimento. Para mostrar o funcionamento do controlador, um gráfico do erro de temperatura durante o experimento é mostrado na Figura 60 e pode ser visto que em aprox.
Comparação dos resultados
Disponível em: