UTILIZAÇÃO DE UM SIMULADOR VIRTUAL 3D TIPO REACH STACKER APLICADO À ANÁLISE DE ACIDENTE EM UM PORTO REAL. UTILIZAÇÃO DE UM SIMULADOR VIRTUAL 3D TIPO REACH STACKER APLICADO À ANÁLISE DE ACIDENTES DE UM PORTO REAL / Nefi Augusto de Nóbrega Estork; consultor Sérgio A.

JUSTIFICATIVA
De acordo com o classificador de risco norueguês DNV GL®, a análise de acidentes ou quase acidentes é realizada por meio da verificação dos critérios para eventos não planejados com consequências de danos físicos a pessoas, estruturas ou processos. Com o objetivo de demonstrar a ocorrência de incidente, contatos, origem direta, origem básica e falta de controle, bem como aumentar a segurança da operação, além de aprimorar o método, o objeto de estudo “Usando um simulador de máquina virtual 3d " é originado. tipo reach stacker usado para análise de acidentes em um porto real" (DNV GL, 2022).
OBJETIVOS
Objetivo geral
Objetivos específicos
PRINCIPAIS CARACTERÍSTICAS TÉCNICAS DA REACH STACKER
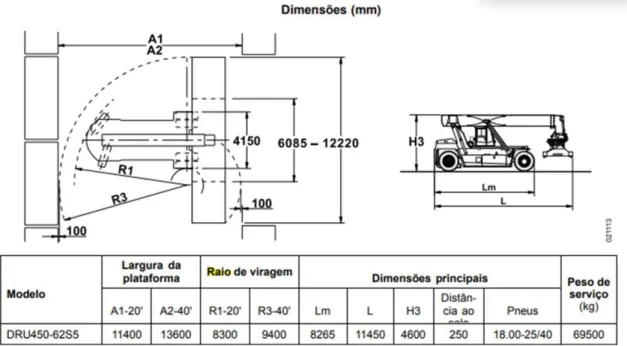
Um espalhador é usado para prender a máquina ao contêiner, que pode ser ajustado para tamanhos de contêiner padrão de 40' ou 20', ou seja, 12,18 m ou 6,08 m, respectivamente, e pode ser girado. 800°, cerca de duas voltas. Para isso, é necessário considerar uma máquina com peso total de aproximadamente 69,9 t, que está disposta no chassi do equipamento com aprox. A Figura 5 mostra o centro de gravidade da máquina em repouso, com o braço retraído e sem carga.
Porém, é possível analisar através da figura 6 que seu centro de gravidade se movimenta durante a operação, pois o fabricante limita a massa e a distância do engate do container conforme a distância entre a extremidade da roda dianteira e o centro de gravidade do container . carga, então pode-se dizer que o centro de gravidade do sistema muda de acordo com a massa do contêiner, sua distância e altura (KALMAR, 2019). As informações da placa da máquina permitem observar que os campos H e L indicam o tamanho da carga que a máquina pode levantar a uma determinada altura do dispositivo (H) e a distância da frente da máquina (L) ( KALMAR, 2019).

UNITY 3D
Uma característica importante do Unity é que ele permite que o editor seja customizado por meio de código de programação, aumentando os recursos dos dials do editor (HOCKING, 2018). A sequência de desenvolvimento visual é única, a maioria dos softwares para desenvolvimento de jogos e simulações geralmente formam uma combinação de diferentes partes que podem ser desde programação até bibliotecas que requerem uma configuração de ambiente de desenvolvimento integrado (IDE), uma rede de construção ou outros suportes para Unity ( HOCKING, 2018). A área de interação do Unity é dividida nas seguintes partes: guia cena, guia jogo, barra de ferramentas, guia hierarquia, guia inspeção.
Você pode encontrar todos os arquivos na aba do projeto e também adicionar itens à cena de criação mostrada na aba da cena. A inspeção lista informações sobre os objetos selecionados na aba cena, incluindo o script utilizado no objeto, execução de testes no simulador na aba jogo enquanto apresenta o erro na aba console (HOCKING, 2018).
VISUAL STUDIO
PROGRAMAÇÃO C# (C SHARP) NO UNITY
Para a realização deste trabalho foram utilizadas informações sobre acidentes e incidentes do terminal portuário estudado, modelo 3D da reach stacker e contêineres, fotos aéreas do pátio portuário analisado e os softwares Unity e Visual Studio. Como esta é uma informação sensível para a empresa, o nome e local deste trabalho não serão divulgados neste trabalho.
DADOS UTILIZADOS
Por se tratar de informações sigilosas para a empresa, o nome e localização desta parte não serão divulgados nesta parte. salvou);. Categoria "Reach Stacker": categoria em que apenas um reach stacker está participando do evento, podendo ser apenas um ou mais. Os critérios de identificação dos acidentes/incidentes a simular basearam-se na frequência do tipo de ocorrência e na sua gravidade, tendo em conta os acidentes graves com elevado risco para a integridade física do operador da máquina ou trabalhadores próximos.
SIMULAÇÃO DOS ACIDENTES
Os objetos gráficos reach stacker e container (Figura 13) foram adquiridos pelo IFSC por meio do projeto de pesquisa PVITJ2439/2021 do edital interno 38/2021/PROPPI. A simulação da máquina foi realizada através de código de programação utilizando o programa Microsoft® Visual Studio de um sistema veicular Unity padrão, adaptado e adaptado para uma máquina reach stacker, as configurações e condições iniciais foram alteradas para adaptação ao reach stacker. O trabalho é desenvolvido implementando os movimentos da máquina (física), implementações gráficas como luz e som, configuração para um movimento realista da máquina, definindo os acidentes a serem simulados de acordo com os critérios adotados e a simulação de acordo com os estudos de acidentes obtidos com o terminal portuário.
CONFIGURAÇÃO DA REACH STACKER
Também foram configuradas as luzes do veículo, faróis e lanternas traseiras na cor branca, luzes de freio na cor vermelha, luzes de sinalização na cor laranja e luzes da lança na cor azul claro, que é a intensidade do farol, freio e lança alta, luzes de sinalização média e ré. luz baixa. Foi utilizado o sistema convencional para movimentar o reach stacker, configurado "W" para deslocamento para frente e "S" para deslocamento para trás, a tecla "A" movimenta as rodas para a direita e "D" para a esquerda. É importante esclarecer que os movimentos da lança (boom) e do espalhador não foram desenvolvidos neste estudo, pois foram realizados em um trabalho de conclusão de curso paralelo intitulado “IMPLEMENTAÇÃO DE UM SISTEMA DE FASES E TAREFAS UTILIZANDO O SIMULADOR 3D EM EMPILHADEIRAS DO TIPO REACH PILHAS PARA TREINAMENTO E RECICLAGEM DE OPERADORES” de Fabricio Simões Fonseca Hermes, e são de extrema importância na simulação de partes móveis em acidentes e incidentes.
Os movimentos da lança (boom) eram realizados pelas teclas “I”, “K”, “J” e “L”, nas quais são levantadas, abaixadas, retraídas e estendidas respectivamente, no espalhador são realizadas por meio das teclas "Q", "E", "T", "U", "O", "V" e "B", que diminui para container a 20', aumenta para 40', prende-se ao container, gira contra no sentido horário, gira no sentido horário, rola para a esquerda e rola para a direita, respectivamente. A primeira é a câmera alta, que mostra o reach stacker e possibilita a visualização da simulação por cima e por trás da máquina (Figura 14).
SELEÇÃO DOS ACIDENTES
SIMULAÇÃO DOS ACIDENTES
Simulação do acidente 01
O operador da máquina posicionou o container cheio de referência em relação à pilha de itens vazios posicionados ao lado, com os cantos moldados (peças quadradas com cavidades ovais colocadas nas quatro extremidades do container com a intenção de apoiar um container sobre o outro e sendo o ponto de içamento) errado, fator que contribuiu para a queda dos contêineres, estando em desacordo com o Procedimento Operacional Padrão (POP). Para visualizar como os contêineres foram posicionados, foi feita uma projeção gráfica da situação e anexada ao relatório de investigação do acidente, onde o contêiner de referência cheio é sinalizado pelo contêiner azul e os contêineres laranja são os que caíram (figura 19). Tendo a investigação como guia para a criação do cenário do acidente 1, desenvolveu-se um terreno com características semelhantes, bem como as pilhas de contentores.
Para os armazéns foram utilizados 22 contentores, 1 cinzento com peso de 40 t para simular um contentor cheio, 2 azuis fabricados pela CMA CGM e COSCO com 7 t, onde um serviu tanto de base como na vida real, e outro 19 contentores vermelhos de 4 t cada, que simulam contentores vazios. Com a configuração inicial do cenário foi possível realizar a simulação desejada, colocar a máquina em frente a uma pilha de contêineres e abrir o espalhador por 40', o braço foi levantado e a máquina se aproximou (Figura 23), o braço foi abaixado e o espalhador foi preso ao container (Figura 24) e por fim levantando o container com a queda das demais unidades.
Simulação do acidente 02
A investigação do acidente envolveu o técnico de segurança do trabalho, o gerente de HSSE e o gerente de pessoal, as causas encontradas foram operação defeituosa do reach stacker, contêiner mal revestido, sequência de manobras e comandos executados pelo operador não foi o mais adequado para situações ruins de recipiente oval. Conseqüentemente, o trabalhador deve realizar o curso de reciclagem de empilhadeiras de grande porte, incluir no POP o item operação de reach stacker nas situações em que tenha utilizado embalagens mal utilizadas. Usando as informações da investigação deste acidente como fonte para construir a simulação, foi utilizado o cenário padrão e 20 contêineres, 10 cinzas com massa de 40 t para simular os contêineres cheios que estavam na pilha, 2 azuis do CMA CGM de 7 t , como o da foto do exame 01 (Figura 26) e outros 8 vermelhos, incluindo um mal ovova que causou o evento.
Para simular um contêiner com o centro de massa deslocado para simular um contêiner mal ovóide, o centro de massa de um contêiner no Unity 3D foi movido (Figura 27). Para simular este acidente, posicionou-se o contentor com o ovo estragado à frente da pilha, abriu-se o espalhador 40' e juntou-se ao contentor (figura 28), após juntar e levantar tentou-se rodar o espalhador (figura 29), a visualização é realizada por outro ângulo (figura 30).

Simulação do acidente 03
Momentos após o posicionamento para movimentação, as portas se abrem e tombam as caixas de material metálico (figura 32). Para simular a queda do objeto de dentro do recipiente, foram colocados 3 cubos dentro do recipiente como se fossem peças de metal (figura 33).

SIMULAÇÃO DO INCIDENTE
Na Figura 36c, ocorreu uma colisão entre os dois veículos, com um terceiro caminhão passando dentro do raio de giro da empilhadeira. Na segunda sequência de registros apresentada (Figura 37), o trator terminal para, a empilhadeira inicia o movimento e bate no caminhão. Se o conjunto do trator terminal já estiver carregado com um contêiner de descarga, o operador do trator terminal.
Após o descarregamento, o operador do Terminal Tractor deve aguardar a sinalização do operador da Reach Stacker para iniciar o percurso.” (ANÁLISE DE ACIDENTES, 2021). O veículo utilizado é modelo fornecido gratuitamente para o serviço, não sendo o mesmo modelo dos caminhões ou tratores terminais de terceiros envolvidos nas investigações de acidentes.

ACIDENTE 01
ACIDENTE 02
Os resultados dessas simulações mostram que é possível simular e verificar os riscos de acidentes por meios computacionais e demonstrar o funcionamento da operação portuária através da máquina reachstacker. A Figura 42 permitiu analisar que não seria viável continuar com a manobra de giro do contêiner.
ACIDENTE 03
SIMULAÇÃO DE INCIDENTE
Para a realização desta parte final do curso, foi fundamental a parceria estabelecida com a Área de Segurança do Trabalho do Terminal Portuário para análise de ocorrências envolvendo máquinas do tipo reach-fork; que forneceu as informações necessárias para análise e posterior simulação. Em resposta às informações prestadas pela empresa, as simulações foram apresentadas ao Departamento de Segurança do Trabalho, que manifestou interesse em utilizá-las para futuras investigações como forma de apresentação gráfica, uma vez que a utilização de um simulador virtual 3D para análise de acidentes permite a investigador com a possibilidade de repetir o acidente e as experiências do ocorrido, além da observação de vários ângulos diferentes, que podem subsidiar o direcionamento da investigação e auxiliar na resolução do sinistro. Os cenários desenvolvidos no ambiente virtual para simular acidentes e incidentes no ambiente portuário, bem como para controlar movimentos reais de máquinas para essas situações no ambiente de simulação, foram desenvolvidos conforme o esperado.
Ainda como opção para trabalhos futuros, sugere-se a realização de uma simulação do funcionamento de um complexo portuário completo, como empilhadeiras, porteiros, navios, terminal tratores e demais instalações que compõem um complexo portuário. Disponível em: