Methodological proposals regarding the acquisition of velocities and propagation of uncertainties in the process of matching time and geodetic references. It includes determining the velocity of GNSS stations, obtaining a velocity model for the South American plate (Brazil) and evaluating the effect of the propagation of uncertainties in the reference change process as well as updating the coordinates - the final accuracy of the estimated coordinates.
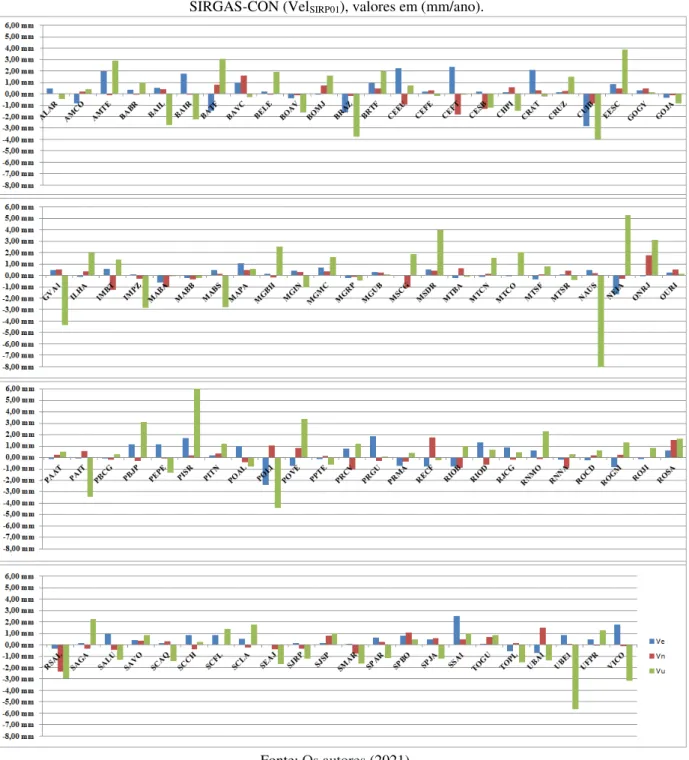
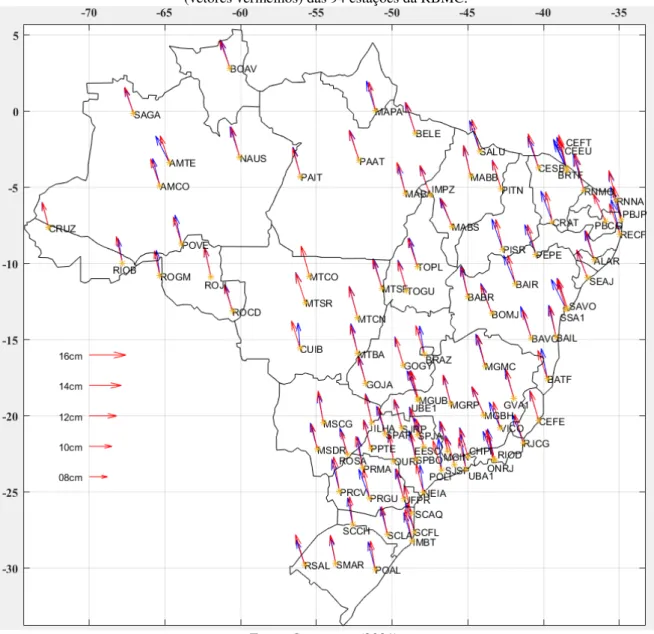
36 Figura 4 - Discrepância entre as velocidades obtidas no experimento VelTSR com os valores obtidos na implementação do SIRGAS-CON (VelSIRP01), valores em (mm/ano). 42 Figura 5 – Vetores resultantes do experimento VelTSR (vetores azuis) e VelSIRP01 (vetores vermelhos) das velocidades planimétricas de 94 estações da RBMC.
CONSIDERAÇÕES E MOTIVAÇÃO
Para isso, é importante que os parâmetros de Helmert sejam monitorados por sua precisão e que a propagação da incerteza seja realizada no processo de compatibilidade de referência. Dessa forma, é possível ter acesso à precisão das coordenadas ao longo do processo de referência e compatibilidade de época.
OBJETIVOS
CONTEÚDO DO TRABALHO
GERAÇÃO DE MODELO DE VELOCIDADE PARA UMA PORÇÃO
Introdução
As velocidades das estações GNSS são obtidas através da análise de séries temporais de coordenadas GNSS. Berthier et al., 2019 investigaram, a partir de séries temporais de coordenadas GNSS, os efeitos da sazonalidade na determinação da velocidade vertical por uma estação GNSS para analisar a deformação induzida pelo carregamento sazonal.
Séries temporais de coordenadas GNSS
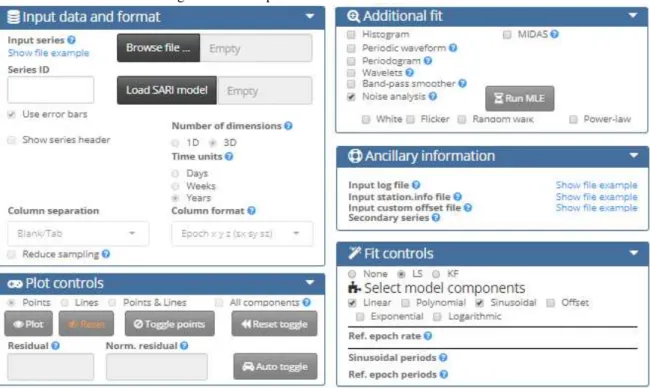
- Análise de séries temporais no SARI
Assim, um modelo de ruído de lei de potência é ruído branco quando k é zero (k=0); o ruído flicker quando k é igual a -1 e k é igual a -2 é ruído de passeio aleatório (WANG; ruído HERRING começa a se tornar mais importante do que sinais periódicos (sazonalidade) para séries temporais em 9 anos. Santamaría-Gómez (2019) recomenda amostragem semanal em análise de longas séries temporais de coordenadas obtidas por GNSS.
Materiais e métodos
Materiais
- Métodos
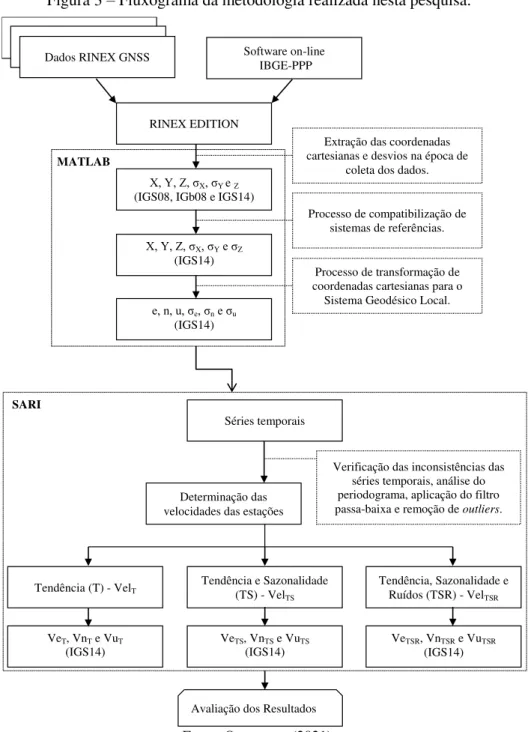
Além do software SARI e do serviço online do IBGE-PPP, também foram utilizados os softwares Matlab (versão 2012b) e RINEX EDITION (NASCIMENTO et al., 2017). As coordenadas diárias estimadas para cada componente do SGL ao longo de um período representam a série temporal da estação, ou seja, cada estação gerou três séries temporais. Após a etapa de determinação das coordenadas no SGL, foram realizados três experimentos para determinar as velocidades da estação, nos quais as séries temporais foram ajustadas por meio do software SARI do MMQ.
Ressalta-se que a detecção de outliers é uma parte importante, pois eles podem interferir na aquisição de velocidade das estações GNSS e dificultar a análise de outros sinais na série temporal (GEIRSSON, 2003).
Resultados e Discussão
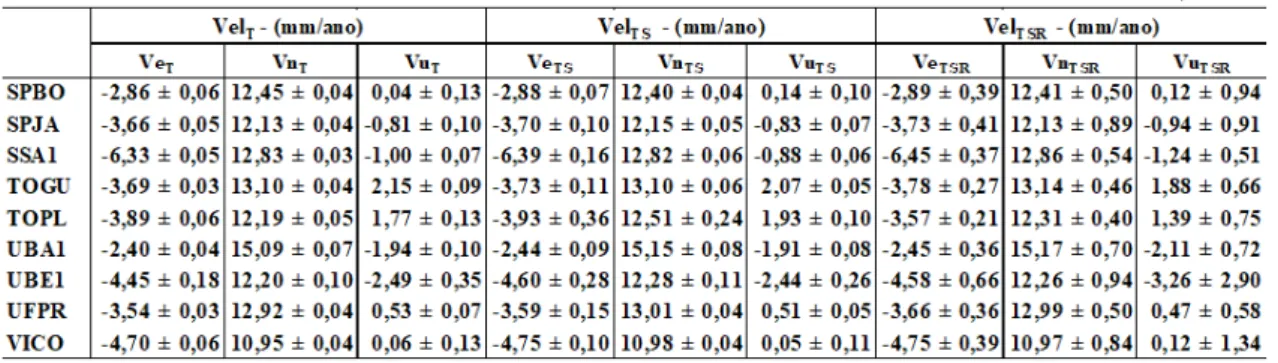
Assim, assumindo que as velocidades obtidas pelo experimento VelTSR correspondem aos valores mais confiáveis para as estações, este experimento foi comparado com outros. Em seguida, as velocidades obtidas no experimento VelTSR foram comparadas com os valores obtidos no SIRGAS-CON (SIR17P01, temporada 2015). Também é possível notar que as discrepâncias são menores que 1 mm em 81%, 87% e 37% nas componentes (e), (n) e (u), respectivamente, indicando concordância nas componentes horizontais e um comportamento de a componente diferenciada (u) ao comparar as velocidades fornecidas pela realização do SIRGAS-CON (VelSIRP01) com os valores obtidos no experimento VelTSR.
Para uma melhor visualização das velocidades das estações analisadas nesta pesquisa, será apresentada a Figura 5, correspondente aos vetores derivados das velocidades planimétricas do experimento VelTSR e VelSIRP01.
Considerações finais e conclusões
Por fim, Smith (2020) desenvolveu uma pesquisa com o objetivo de verificar e avaliar a influência da precisão PT, coordenadas e velocidades da estação no processo de propagação de incertezas na compatibilidade de referências e tempo. Para realizar a propagação das incertezas na compatibilidade do referencial, primeiro é necessário propagar as incertezas no processo de atualização do PT do referencial para as coordenadas, que é dado pela Eq. C”, verifica-se o efeito da precisão das velocidades das estações GNSS na compatibilidade de época das coordenadas.
Os resultados obtidos na Tabela 6 mostram que a precisão planimétrica média das coordenadas apresenta depreciações significativas quando se considera a precisão dos PTs e as velocidades das estações GNSS no processo de referência e compatibilidade temporal (Simulação “D”).
MODELO DE VELOCIDADE PARA UMA PORÇÃO DA PLACA
Introdução
A determinação de um modelo de velocidade pode ser realizada conforme Sánchez et al. 2018), através da interpolação matemática de velocidades específicas. Sánchez e Drewes (2016), que estudaram a deformação da costa latino-americana após o terremoto de 2010, bem como o modelo de superfície cinemática; Salamanca (2016), que elaborou um modelo da deformação da costa continental ao norte dos Andes; e ainda Luna et al. 2018), que determinou um campo de velocidade para o Equador. Sánchez e Drewes (2020), que realizaram monitoramento geodésico da deformação variável da superfície na América Latina usando dados GNSS e técnicas de processamento de mínimos quadrados; Funderburk e Oguntuase (2019), que estudaram a variabilidade espacial do deslocamento vertical e horizontal por meio da análise de séries temporais de estações de monitoramento na rede CORS ativa; Li, Ching e Chen (2019), que produziram um modelo de deformação usando o método de interpolação de krigagem em Taiwan; Ansari e Bae (2020), que avaliaram a análise de deformação e o padrão de deformação na Coreia do Sul com dados GNSS; Ren, Lian e Wang (2021), que propuseram um método para obter deformações sísmicas em séries temporais de estações GNSS a serem usadas para determinar o campo de velocidade GNSS; e Manevich et al. 2021), que modelou o campo de velocidade horizontal usando redes neurais artificiais e desenvolveu um modelo de velocidade na Rússia.
Nesse sentido, tendo em vista a importância de um modelo de velocidade mais preciso ao realizar a atualização das coordenadas GNSS e a necessidade contínua de aprimorar e atualizar os modelos de movimentação das placas tectônicas, este trabalho teve como objetivo determinar um modelo de velocidade para o Brasil utilizando o interpolador geoestatístico de krigagem ordinária em velocidades de interpolação de estações GNSS obtidas a partir de séries temporais de coordenadas GNSS (considerando tendência, sazonalidade e ruído).
Modelo de Velocidade de Placa Tectônica
- Estatística Espacial
- Modelos de movimento de placa (MMP)
- VEMOS2017
Depois de escolher o modelo matemático. semivariograma teórico), a interpolação de dados é realizada para gerar a grade do modelo de velocidade. Depois de executar as etapas acima, é possível determinar um modelo de velocidade de uma determinada placa tectônica, outra maneira de realizar a modelagem do movimento da placa tectônica é determinar o modelo do movimento da placa (PMM ou MMP). Vale ressaltar que nesta pesquisa o MMP será utilizado apenas para validar o modelo de velocidade desenvolvido.
Ambos os modelos MMP ITRF2014 e GSRM2014 foram selecionados para comparação com o modelo de velocidade gerado usando krigagem ordinária.
Materiais e Métodos
- Materiais
- Métodos
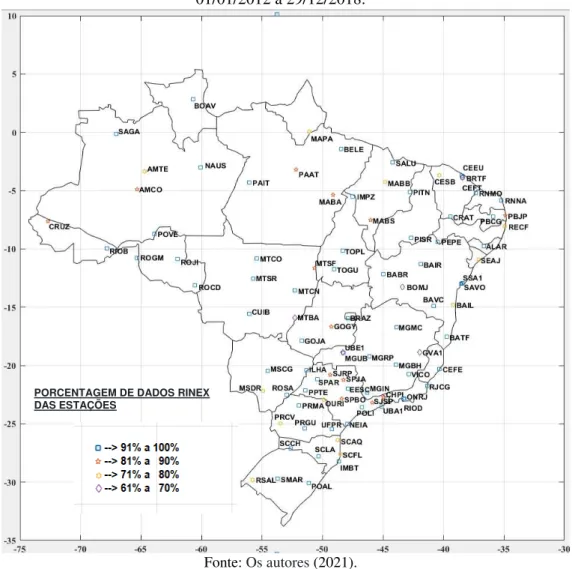
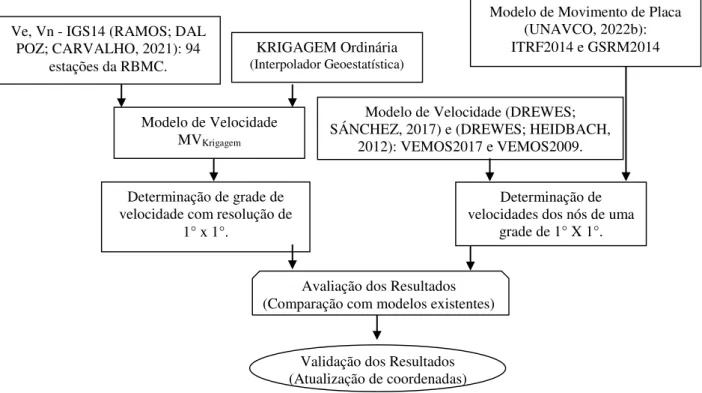
IBGE-PPP na realização de pós-processamento de dados GNSS; RINEX EDITION (NASCIMENTO et al., 2017), que auxiliou na transferência e pós-processamento de dados GNSS e extração de informações de arquivos para processamento; software R para realizar análises estatísticas e interpolar dados de velocidade; e Matlab (versão 2012b) na confecção das figuras. Após determinar as velocidades das estações da RBMC (RAMOS; DAL POZ; CARVALHO, 2021), o próximo passo foi a realização da análise estatística dos dados (análise exploratória) e a utilização de um interpolador geoestatístico, que incluiu a determinação do modelo de velocidade. usando krigagem ordinária como interpolador. Além disso, uma grade regular (1° x 1°) foi determinada com valores de velocidade obtidos do MVKriging.
Também foram realizadas atualizações das coordenadas de 62 estações da RBMC com os quatro (4) modelos de velocidade utilizados nesta pesquisa, que é mais uma forma de testar o desempenho do modelo de velocidade com o objetivo de validar os resultados.
Resultados e Discussão
Por fim, uma grade regular com resolução de 1° x 1° foi gerada com os valores de velocidade obtidos por interpolação, criando o modelo de velocidade MVKriging (Lat, Long, Vn e Ve). Pela Tabela 4 é possível perceber que o modelo de velocidade elaborado neste trabalho (MVKriging) deu resultados significativos na atualização das coordenadas. Assim, pode-se dizer que o modelo de velocidade MVKriging se mostrou mais eficaz que o GSRM 2014(MMP) e os modelos VEMOS2017 e 2009 na atualização de coordenadas.
Neste cenário, o modelo de velocidade desenvolvido apresentará resultados semelhantes aos modelos de velocidade ITRF2014 (MMP) e VEMOS2009.

Conclusão
Modeling of the velocity field in a regular grid in the area of Poland based on the velocities of European permanent stations. Determination of the tectonic plate movement parameters based on SLR, DORIS and VLBI station positions. Methods and results of determining movements and deformations of the Earth's crust according to GNSS data at the Nizhne-Kansk geodynamic test network in the field of radioactive waste disposal.
The ongoing modernization of Taiwan's semi-dynamic datum based on the horizontal surface deformation model using GNSS data from 2000 to 2016.
PROPAGAÇÃO DE INCERTEZAS NO PROCESSO DE COMPATIBILIZAÇÃO
Introdução
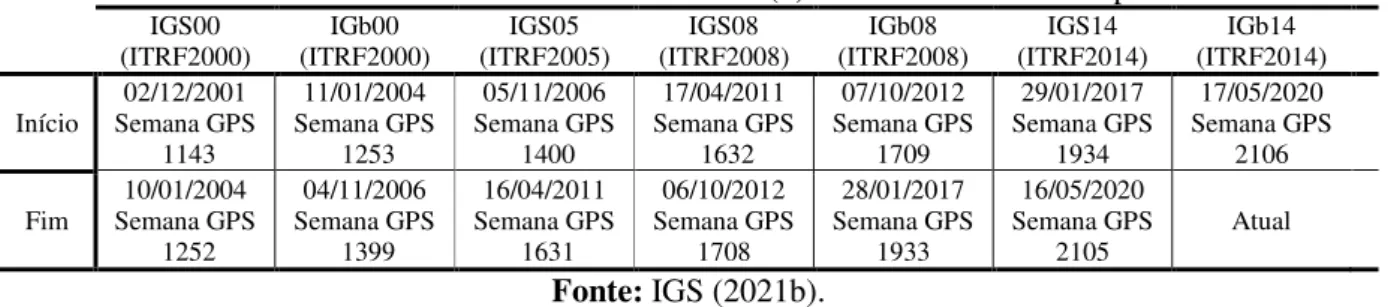
Para que a referência seja compatível (transformação de referência), devem ser utilizados os parâmetros de transformação (PT), que são fornecidos pelo IBGE (2021b). Assim, para poder determinar a influência das precisões dos PTs nas precisões das coordenadas após o processo de compatibilidade de referência, usando técnicas de propagação de incerteza, é importante obter as precisões dos PTs de ITRF2014 a SIRGAS2000(ITRF2000 ), que permite realizar a transformação de referência diretamente (utilizando apenas estes PTs). Para verificar a influência da precisão das velocidades na propagação das incertezas no processo de casamento de época das coordenadas, é necessário obter a precisão das velocidades das estações.
Ou seja, atingir a precisão de todos os elementos envolvidos no processo de compatibilidade de referência (PT, variações temporais de PT e coordenadas) e tempo (velocidade das estações GNSS) é essencial no processo de propagação de incertezas, pois só assim, será possível determinar a influência de incertezas generalizadas na precisão das coordenadas que são compatíveis em referência e época.
Compatibilização de referenciais e época
- Compatibilização de referencial
- Compatibilização de época das coordenadas e mudança de referencial das
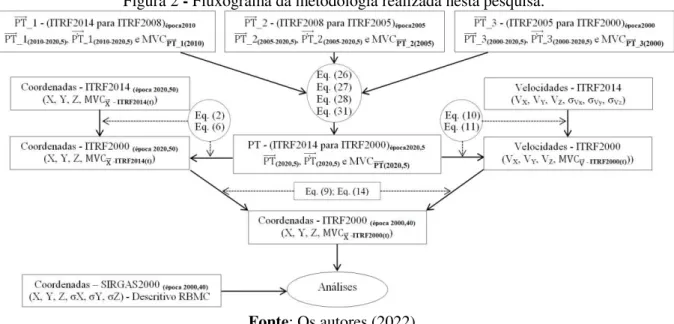
Após a atualização dos TPs de referência, a referência de coordenadas é alterada usando a transformação de Helmert, com a Eq. Onde: - MVCX⃗⃗ B(t) matriz de covariância das coordenadas após a mudança de referência, da referência "A" para "B"; - Matriz jacobiana JMR – derivada parcial da equação. Para realizar a propagação das incertezas no casamento das épocas (Eq. 9) é necessário, primeiro, propagar as incertezas na mudança das velocidades de referência (Eq.
Por fim, após realizar a propagação das incertezas na mudança de referência das coordenadas (Eq. 11)), é possível realizar a propagação das incertezas na compatibilidade de época das coordenadas (Eq.
Sistema Geodésico Local
JAC Matriz jacobiana – derivada parcial da Eq. 9) em relação aos seus parâmetros (coordenadas no referencial "B"; J matriz jacobiana, é a derivada parcial da Eq. 17) em relação às coordenadas cartesianas geocêntricas; e - MVCx,y,z a matriz de covariância das coordenadas cartesianas geocêntricas. Nesse sentido, deve-se notar que a mudança da referência de velocidades do sistema de coordenadas cartesianas para o SGL é análoga à transformação da referência de coordenadas (Eq.
Deve-se notar que a propagação das incertezas das velocidades é semelhante à propagação das incertezas das coordenadas (Eq.
Materiais e Métodos
- Materiais
- Métodos
Obtidas as coordenadas da estação, PTs e velocidades, iniciou-se o processo de referência e compatibilização de horários. Simulação B: assumindo a precisão de PT e as velocidades iguais aos valores estimados na propagação da incerteza e precisão zero das velocidades; Simulação C: assumindo que as precisões de PT e velocidade são zero e que as precisões de velocidade são iguais aos valores estimados pela propagação de incertezas;
Simulação D: Utilizando os valores de precisão de PT e velocidades correspondentes aos valores estimados na propagação das incertezas e considerando a precisão das velocidades correspondentes aos valores estimados na propagação das incertezas.
Resultados e Discussão
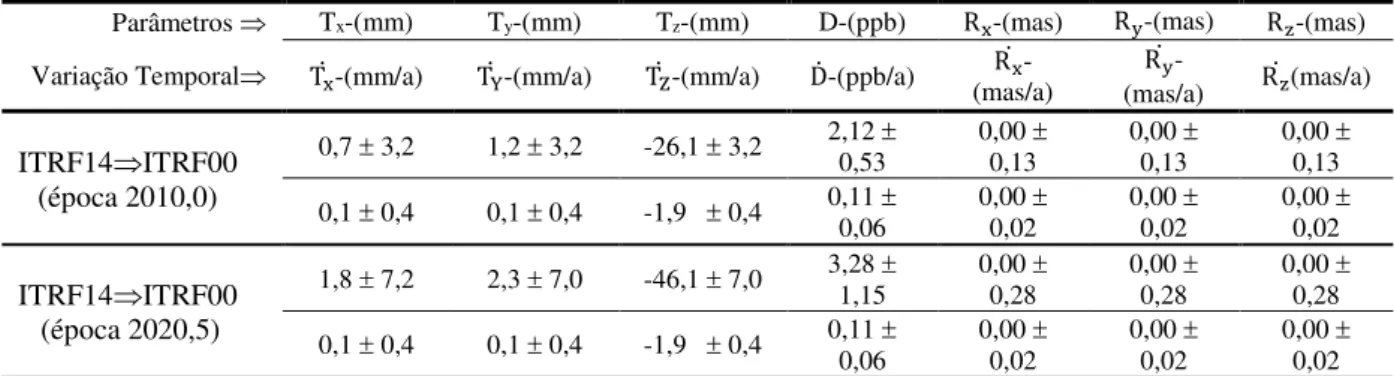
Como pode ser observado na Tabela 3, as precisões do PT (ITRF14ITRF00) deterioram-se aproximadamente duas vezes quando são compatibilizadas na safra (de 2010,0 a 2020,5). Também foram determinadas as precisões do PT e taxas, bem como suas respectivas precisões de ITRF2014 a ITRF2005 e ITRF2008, na época de 2020.5. A precisão das coordenadas, após compatibilização no referencial e no tempo e referidas ao sistema de coordenadas geocêntricas cartesianas (σx, σy e σz), foi transformada para SGL (σee σn).
Em geral, ignorando toda a precisão dos elementos utilizados na distribuição das incertezas, ao realizar a compatibilização de referência e tempo, os resultados tornam-se mais otimistas, ou seja, sua qualidade é superestimada.
Considerações Finais e Conclusões
Por fim, é importante destacar a relevância de se realizar a propagação de incertezas no processo de compatibilização de referências e épocas estimando a precisão das coordenadas compatibilizadas em referência e época, para não superestimar a qualidade. Também é digno de nota que a realização da propagação de incertezas ao realizar correspondência de referência e época não é usada na prática. Portanto, objetivou-se determinar a precisão dos parâmetros de transformação entre ITRF2014 e ITRF2000, além de mostrar como a precisão das coordenadas é depreciada quando se propagam incertezas na compatibilidade de época e referência.
Além disso, procurou-se apresentar detalhadamente todas as etapas necessárias para realizar a disseminação de incertezas na compatibilidade de época e referência.