AI-based radio access network (RAN) slicing and VNF placement are used as examples of the testbed capabilities. Artificial intelligence (AI) tools constitute an important part of the strategy to automate the implementation and configuration of parameters in a 5G network with the aim of achieving, for example, self-organizing networks (SON) [2] and zero-touch networks [ 3].
Related Works
Some other testbeds focus on MANO implementations to offer partial or full end-to-end network slicing across the RAN, Transport Network (TN) and Core Network. 5 MANO implementation can be avoided in research that is not focused on end-to-end network slicing or on aspects such as managing their life cycles.
Contributions
Outline
Outcomes
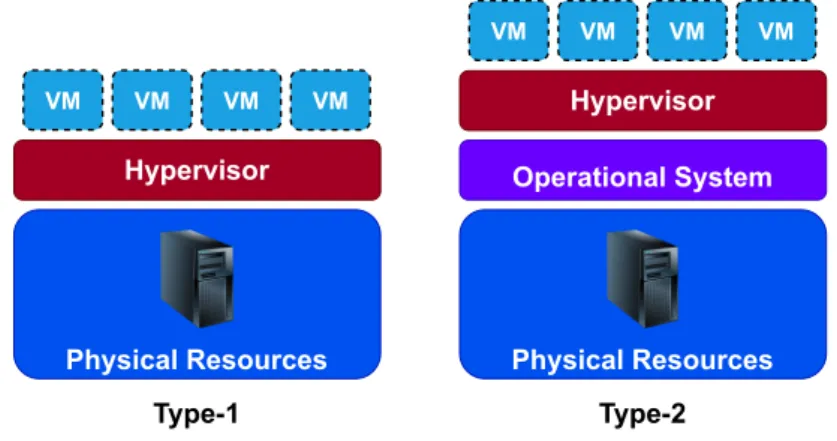
Cleverson Nahum, Leonardo Ramalho, Joary Fortuna, Chenguang Lu, Miguel Berg, Igor Almeida and Aldebaro Klautau. Deploying applications directly through operating systems (OS) in the physical infrastructure can make it difficult to isolate and manage the resources of those applications. There are two main types of hypervisor (type-1 and type-2) [27], where type-1 refers to the bare hypervisor because they are installed directly in the hardware of the host machine.
Each VM in type-2 virtualization has an entire OS structure which guarantees greater isolation with respect to other VMs with each guest OS having its own kernel. Alternatively, containers are an easy option, as they do not require deploying an entire guest OS due to sharing the kernel with the host OS as shown in Fig.
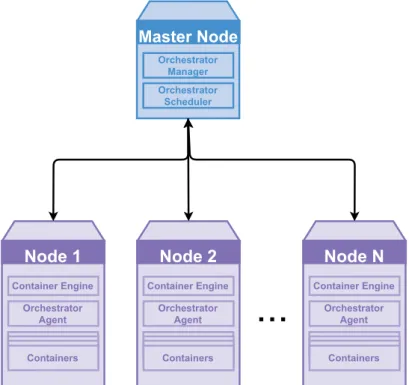
Containers orchestration
Containerized applications using Docker are built from images that act as the source code for the container [31]. Docker images are built using a file called a Dockerfile that describes a container image that specifies the OS file system, packages, and dependencies used for each container. The main functions of a container orchestrator are resource limit control, scheduling, load balancing, health checking, fault tolerance, and automatic scaling [33].
Scheduling defines the policy used to deploy the requested containers to worker nodes of the cluster. These policies can be based on resource constraints, node affinity, or manually specified by the user requesting the container deployment. Health check verifies that containers are responding to requests and observes port connections such as TCP, UDP, and SSH, which gives a good indication of whether the container is overloaded.
Software Defined Network (SDN)
Mininet
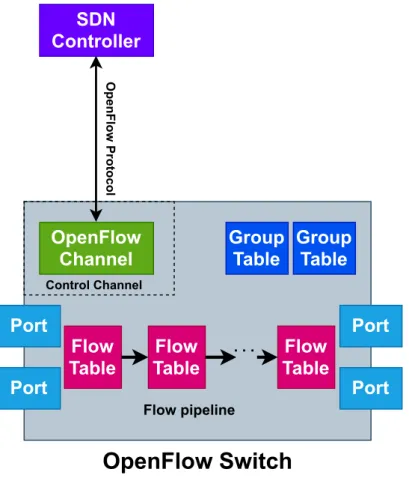
The topology to be emulated with Mininet is defined using scripts or a visual tool called MiniEdit. After topology implementation, all virtualized hosts are individually accessible and can communicate with other hosts according to the conditions defined in the topology description. In addition, an SDN controller with support for OpenFlow can be connected to the Mininet emulated topology to manage the network and control the Open vSwitches, enabling all activities of an SDN network.
All hosts can communicate with each other through the network paths defined in the topology description. When there is more than one possibility of a path to reach the destination, a default path can be defined in the topology.
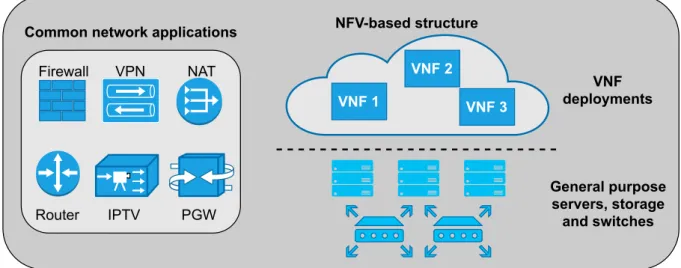
Network Function Virtualization (NFV)
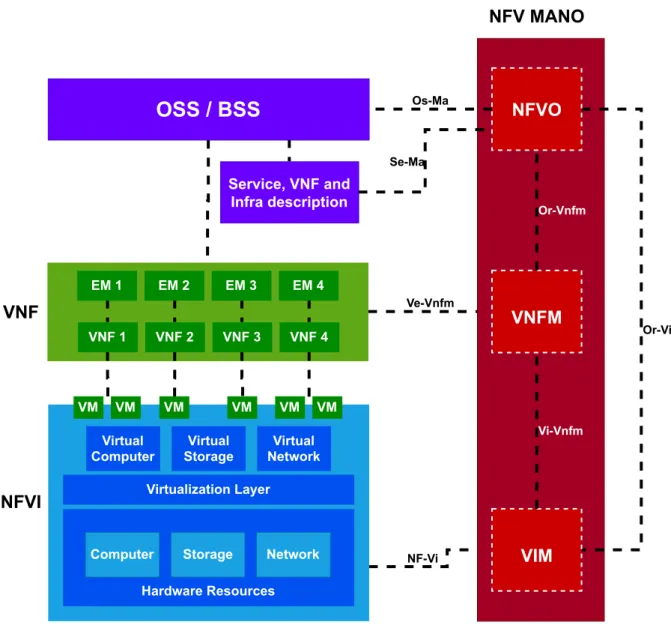
The NFVI component is responsible for managing the hardware resources such as compute, storage, and network, and through a virtualization layer (which can be a hypervisor or container engine), provides virtualized resources that can be used by VNFs. MANO is responsible for managing and orchestrating both VNFs and NFVI to meet user-requested service requirements. The automation, management and operation of the distributed NFVI in the NFV system is responsible for orchestrating and managing both software and hardware and providing NFV services [1].
First, OSS and BSS request a specific service, including details of the applications to be deployed, from the NFV operator who provides a service, VNF and infrastructure description with requirements to be able to provide the requested service. The NFV MANO evaluates the requested service and its requirements and translates the description into the deployment of VNFs using VNFs and NFVI to meet the SLA defined by OSS and BSS.
Network Slicing
RAN slicing
Some of the RAN requirements related to network slicing are dynamic resource management, resource isolation, and sharing [1]. However, complete isolation of each slice can reduce the multiplexing gains in the processing and spectrum resources. RAN slicing applications to network slicing are broad, and in the context of this thesis there is a focus in the RRM applications on different segments.
It is considered that slice A requires a higher data rate than slice B, but it does not have strict latency requirements, while slice B represents a low latency requirement with a small and constant data rate. Given that slice A does not have a constant data rate and it does not use the four RBs available all the time, a new slice C with a low data rate and no low latencies requirements could be allocated by splitting the RBs in slice A.
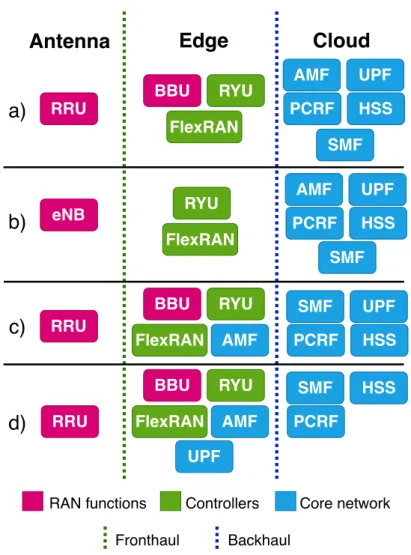
VNF placement
RRM is a process within the base station based on disk information that decides how the RBs should be divided between disks. If the slice B is an application that requires low latency but not a high data rate, RRM can allocate fewer resource blocks to guarantee the application traffic, while RRM allocates a larger number of RBs to slice A. Slice A concentrates its VNFs in the cloud, which guarantees a lower cost in relation to slices B and C, but offers a greater latency to applications.
Slice B moved some core network functions to the edge location to ensure a decrease in latency, and slice B moved the entire core network to the edge and the eNB to the antenna location, which increases cost but provides the best possible latency and application response guarantees for these mobile phones. network slices. In addition to latency and cost, other aspects must also be considered to achieve efficient VNF allocation, such as an analysis of the physical resources available at each location and the utilization of network connections to better meet the conditions specified in SLA have been established [51].
AI for mobile networks
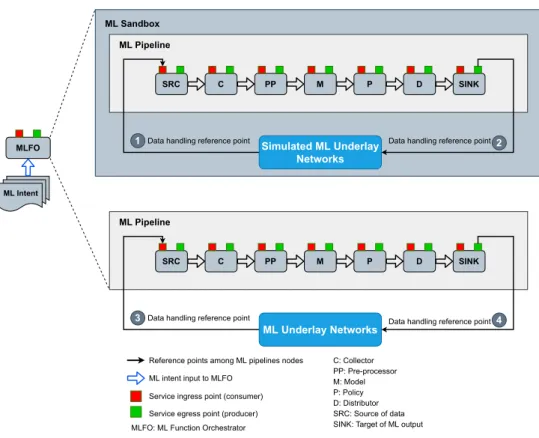
Therefore, AI and more specifically ML methods are very important to investigate network slicing in the mobile network context. The SINK component is the output target of ML, which typically uses the actions suggested by the model in the cellular network to implement improvements in network operations. An ML sandbox is an isolated domain with a simulation of a mobile network system that allows training, testing and evaluation of ML operations before deploying them in a real mobile network.
The ML function orchestrator (MLFO) is a logical node that controls and orchestrates the components of the ML pipeline based on ML intents and network conditions [9]. The next chapter starts a discussion of the implementation of CAI testbed components, focusing on implementation details such as virtualization, orchestration, and connected AI structures used to generate the cellular network to perform tests.
Orchestration
All the code for setting up the testbed and running the use cases that will be explained in the following sections is available on Github.1 The following sections describe each aspect of the testbed in detail. NFVI consists of hardware resources represented by Kubernetes cluster computers in the testbed. A test rig does not need all of these machines, as all VNF functions can be assigned on the same machine using an orchestrator.
The number of machines required in the testbed depends on the scenario to be deployed. The testbed has containers to emulate UEs and baseband functions to enable the use of emulated UEs in the testbed.
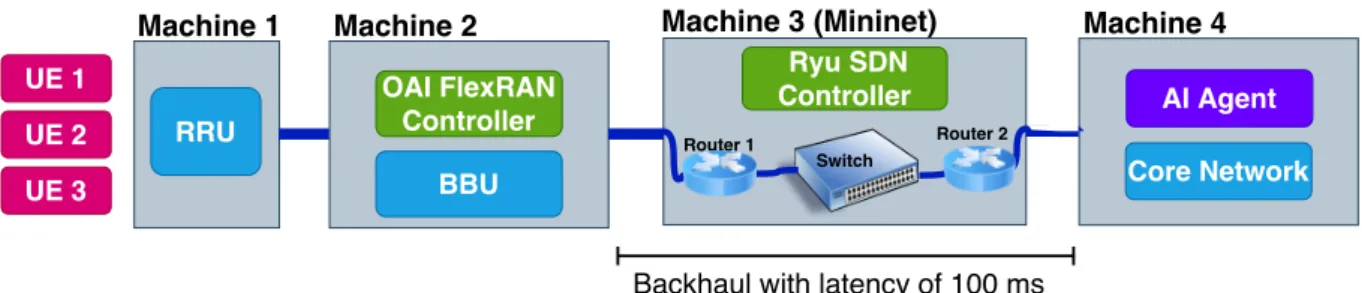
Virtualized fronthaul/backhaul and SDN controller
This figure does not show the SDN controller or other Mininet hosts (routers and switches) because it focuses on how the machine interfaces are connected to the virtual network for ease of understanding. Mininet hosts can communicate with each other through virtual interfaces (VIs) and virtual switches defined in the Mininet topology script, but they are unable to communicate with ETHs from machines, so fronthaul traffic is unable be forwarded through the Mininet topology using the default deployment. The creation of VETHs, machine interfaces, and Mininet hosts can establish a communication link, enabling front-end traffic to be forwarded between RRUs and BBUs.
Using Mininet to deploy the fronthaul increases the flexibility to build different scenarios, as only a script configuration is sufficient to change the topology, packet delay in the VIs and to connect an SDN controller to the virtual switches that was deployed. The SDN controller acts as an information source about the network conditions and as an agent to deploy online changes in the structure of how the Mininet hosts communicate with each other.
RAN programmability
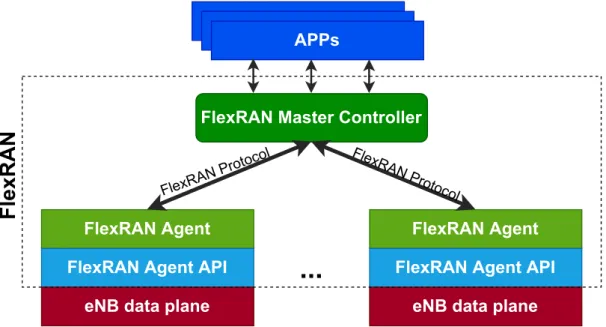
The FlexRAN agent obtains information from eNB and has the function to change the eNB configuration online using the API. In a C-RAN scenario, the FlexRAN agent resides in the OAI BBU instances, also shown in Figure. The FlexRAN Agent API provides the separation of the control and data planes, allowing the control data to be managed by the FlexRAN controller and the eNB data plane on the other side.
FlexRAN APIs enable the development of applications related to the control and management of RAN resources [59], e.g., schedulers, interventions, and mobility managers. FlexRAN does not control flows in the wired domain, so it does not support route management, packet filtering, and other functions related to the computer network domain (routers and switches).
AI Integration
The P component enables the application of policies to the output of the model, e.g. it can be used to define when the output should be sent by the AI agent in a live testbed, since there are actions that have specific events to be applied in networks. The D component sends the model outputs to the corresponding SINK components, which promote actions in the controllers and the core network (represented by process “2” in Fig. 3.6). The random forest also defines the percentage of RBs for each slice to meet the requirements defined in the SLA.
42 When assigning an AI agent, the requirements specified for CBR and MBR slices are met in the first 20 seconds. During the last 20 seconds, the AI agent provides more resources to the MBR and also fulfills the 5 Mb/s required by the less-priority slice (BE).
VNF placement
Ohlen et al., “RAN and Transport Network Orchestration for 5G: An SDN Approach,” IEEE Communications Magazine, vol. Banchs, “POSENS: A Practical Open Source Solution for End-to-End Network Slicing,” IEEE Wireless Communications, vol. Bao, “A survey on software-defined networking and open flow: from concept to implementation,” IEEE Communications Surveys & Tutorials, vol.
Boutaba, "Network Function Virtualization: State of the Art and Research Challenges," IEEE Communications Surveys and Tutorials, vol. Dittmann, "Cloud RAN for Mobile Networks—A Technology Overview," IEEE Communications Surveys and Tutorials, vol. Nikaein, "Forcing network slicing on RAN: Flexibility and resources abstraction," IEEE Communications Magazine, vol.
Soldati, "Radio Teaching Resource Management in RANs: Framework, Opportunities, and Challenges," IEEE Communications Magazine, vol.