Ortogonalidade
5.1 Produto Escalar em R
n5.1.1 Produto Interno
Vimos que podemos estender a soma e a multiplicac¸ ˜ao de vetores por escalar para o Rn. Pode- mos estender tamb ´em os conceitos de produto escalar e ortogonalidade.
5.1 Produto Escalar em Rn 315
Definic¸ ˜ao 5.1. (a) Definimos o produto escalar ou interno de dois vetores
X = (x
1, . . . , x
n)
eY = (y
1, . . . , y
n) ∈
Rn porX · Y = x
1y
1+ x
2y
2+ . . . + x
ny
n=
n
X
i=1
x
iy
i.
(b) Definimos a normade um vetor
X = (x
1, . . . , x
n) ∈
Rn por|| X || = √
X · X =
qx
21+ . . . + x
2n=
v u u tn
X
i=1
x
2i.
Escrevendo os vetores como matrizes colunas, o produto interno de dois vetores
X =
x
1...
x
n
e
Y =
y
1...
y
n
pode ser escrito em termos do produto de matrizes como
X · Y = X
tY.
Exemplo 5.1. Sejam
V = (1, − 2, 4, 3, 5)
eW = (5, 3, − 1, − 2, 1)
vetores do R5. O produto escalar entreV
eW
´e dado porV · W = (1)(5) + ( − 2)(3) + (4)( − 1) + (3)( − 2) + (5)(1) = − 6.
As normas de
V
eW
s ˜ao dadas por|| V || =
p1
2+ ( − 2)
2+ 4
2+ 3
2+ 5
2= √ 55,
|| W || =
p5
2+ 3
2+ ( − 1)
2+ ( − 2)
2+ 1
2= √ 40.
S ˜ao v ´alidas as seguintes propriedades para o produto escalar e a norma de vetores do Rn.
Proposic¸ ˜ao 5.1. Se
X, Y
eZ
s ˜ao vetores de Rn eα
´e um escalar, ent ˜ao (a)X · Y = Y · X
(comutatividade);(b)
X · (Y + Z) = X · Y + X · Z
(distributividade em relac¸ ˜ao `a soma);(c)
(αX ) · Y = α(X · Y ) = X · (αY )
;(d)
X · X = || X ||
2≥ 0
e|| X || = 0
se, e somente se,X = ¯0
; (e)|| αX || = | α | || X ||
;(f)
| X · Y | ≤ || X |||| Y ||
(desigualdade de Cauchy-Schwarz);5.1 Produto Escalar em Rn 317
(g)
|| X + Y || ≤ || X || + || Y ||
(desigualdade triangular).Demonstrac¸ ˜ao. Sejam
X, Y, Z ∈
Rn eα ∈
R. Usando o fato de que se os vetores s ˜ao escritos como matrizes colunas, ent ˜ao o produto escalar pode ser escrito como o produto de matrizes,X · Y = X
tY
, e as propriedades da ´algebra matricial (Teorema 1.1 na p ´agina 10), temos que(a)
X · Y = x
1y
1+ · · · + x
ny
n= y
1x
1+ · · · + y
nx
n= Y · X
. (b)X · (Y + Z) = X
t(Y + Z ) = X
tY + X
tZ = X · Y + X · Z
.(c)
α(X · Y ) = α(X
tY ) = (αX
t)Y = (αX )
tY = (αX ) · Y
. A outra igualdade ´e inteiramente an ´aloga.(d)
X · X
´e uma soma de quadrados, por isso ´e sempre maior ou igual a zero e ´e zero se, e somente se, todas as parcelas s ˜ao iguais a zero.(e)
|| αX ||
2= (αx
1)
2+ · · · + (αx
n)
2= α
2(x
21+ · · · + x
2n) = α
2|| X ||
2. Tomando a raiz quadrada, segue-se o resultado.(f) A norma de
λX + Y
´e maior ou igual a zero, para qualquerλ
real. Assim,0 ≤ || λX + Y ||
2= (λX + Y ) · (λX + Y ) = ( || X ||
2)λ
2+ (2X · Y )λ + || Y ||
2,
para qualquer
λ
real. Logo, o discriminante deste trin ˆomio tem que ser menor ou igual a zero.Ou seja,
∆ = 4(X · Y )
2− 4 || X ||
2|| Y ||
2≤ 0
. Logo,| X · Y | ≤ || X || || Y ||
.(g) Pelo item anterior temos que
|| X + Y ||
2= (X + Y ) · (X + Y ) = || X ||
2+ 2X · Y + || Y ||
2≤ || X ||
2+ 2 | X · Y | + || Y ||
2≤ || X ||
2+ 2 || X |||| Y || + || Y ||
2= ( || X || + || Y || )
2.
Tomando a raiz quadrada, segue-se o resultado.
Dizemos que dois vetores
X
eY
s ˜ao ortogonais seX · Y = 0
. As propriedades do produto escalar permitem introduzir o conceito de bases ortogonais no Rn. Antes temos o seguinte resultado.Proposic¸ ˜ao 5.2. Se
V
1, . . . , V
k s ˜ao vetores n ˜ao nulos de Rn ortogonais, isto ´e,V
i· V
j= 0
, parai 6 = j
, ent ˜ao(a) O conjunto
{ V
1, . . . , V
k}
´e L.I.(b) Se
V =
k
X
i=1
α
iV
i, ent ˜aoα
i= V · V
i|| V
i||
2.
Demonstrac¸ ˜ao. (a) Considere a equac¸ ˜ao vetorial
x
1V
1+ . . . + x
kV
k= ¯0 .
(5.1)5.1 Produto Escalar em Rn 319
Fazendo o produto escalar de ambos os membros de (5.1) com
V
i,i = 1, . . . , k
e aplicando as propriedades do produto escalar, obtemosx
1(V
1· V
i) + . . . + x
i(V
i· V
i) + . . . + x
k(V
k· V
i) = 0 .
(5.2) Mas,V
i· V
j= 0
, sei 6 = j
. Assim, de (5.2) obtemos quex
i|| V
i||
2= 0 .
Mas, como
V
i6 = ¯0
, ent ˜ao|| V
i|| 6 = 0
ex
i= 0
, parai = 1 . . . , k
. (b) SejaV =
k
X
i=1
α
iV
i.
(5.3)Fazendo o produto escalar de
V
comV
j, paraj = 1, . . . , k
, obtemos queV · V
j=
k
X
i=1
α
iV
i!
· V
j=
k
X
i=1
(α
iV
i· V
j) = α
j|| V
j||
2.
Assim,
α
j= V · V
j|| V
j||
2,
paraj = 1, . . . , k
.Definimos a projec¸ ˜ao ortogonalde um vetor
V
sobre um vetor n ˜ao nuloW
porproj
WV =
V · W
|| W ||
2W
.Observe que a projec¸ ˜ao ortogonal de um vetor
V
sobre um vetor n ˜ao nuloW
´e um m ´ultiplo escalar do vetorW
. Al ´em disso temos o seguinte resultado.Proposic¸ ˜ao 5.3. Seja
W ∈
Rn um vetor n ˜ao nulo. Ent ˜ao,V − proj
WV
´e ortogonal aW
, para qualquer vetorV ∈
Rn.Demonstrac¸ ˜ao. Precisamos calcular o produto escalar de
W
comV − proj
WV
:(V − proj
WV ) · W = V · W −
V · W
|| W ||
2W · W = 0.
Portanto,
V − proj
WV
´e ortogonal aW
.O pr ´oximo resultado ´e uma generalizac¸ ˜ao daProposic¸ ˜ao 5.3.
Proposic¸ ˜ao 5.4. Sejam
W
1, W
2, . . . , W
k vetores n ˜ao nulos do Rn, ortogonais entre si, ent ˜ao para qualquer vetorV
,V − proj
W1V − . . . − proj
WkV
´e ortogonal aW
i, parai = 1, . . . , k
.5.1 Produto Escalar em Rn 321
Demonstrac¸ ˜ao. Vamos calcular o produto interno de
V − proj
W1V − . . . − proj
WkV
comW
j, paraj = 1, . . . , k
.V −
k
X
i=1
proj
WiV
!
· W
j= V · W
j−
k
X
i=1
V · W
i|| W
i||
2W
i· W
j= V · W
j−
V · W
j|| W
j||
2W
j· W
j= 0,
pois
W
i· W
j= 0
, sei 6 = j
eW
j· W
j= || W
j||
2.Exemplo 5.2. Considere o sistema linear homog ˆeneo
AX = ¯0
, em queA =
1 1 0 0 1
− 2 − 2 1 − 1 − 1
1 1 − 1 1 0
.
Escalonando a matriz aumentada do sistema acima, obtemos a matriz escalonada reduzida
1 1 0 0 1 0 0 0 1 − 1 1 0 0 0 0 0 0 0
.
E assim a soluc¸ ˜ao geral do sistema pode ser escrita como
x
1= − α − γ, x
2= γ, x
3= − α + β, x
4= β x
5= α
para todos os valores de
α, β, γ ∈
R, ou seja, o conjunto soluc¸ ˜ao do sistemaAX = ¯0
´e W= { (x
1, x
2, x
3, x
4, x
5) = ( − α − γ, γ, − α + β, β, α) | α, β, γ ∈
R} .
Agora, um elemento qualquer de Wpode ser escrito como uma combinac¸ ˜ao linear de vetores deW:
( − α − γ, γ, − α + β, β, α) = ( − α, 0, − α, 0, α) + (0, 0, β, β, 0) + ( − γ, γ, 0, 0, 0)
= α( − 1, 0, − 1, 0, 1) + β (0, 0, 1, 1, 0) + γ( − 1, 1, 0, 0, 0)
Assim, todo vetor de Wpode ser escrito como combinac¸ ˜ao linear dos vetores
V
1= ( − 1, 0, − 1, 0, 1)
,V
2= (0, 0, 1, 1, 0)
eV
3= ( − 1, 1, 0, 0, 0)
pertencentes a W (V
1 ´e obtido fazendo-seα = 1
eβ = γ = 0
,V
2 fazendo-seα = γ = 0
eβ = 1
eV
3 fazendo-seα = β = 0
eγ = 1
). Al ´em disso segue da equac¸ ˜ao anterior queV
1, V
2 eV
3 s ˜ao L.I. Logo{ V
1, V
2, V
3}
´e uma base de W.Vamos, agora, encontrar uma base ortonormal para W. Para isso vamos aplicar a Proposic¸ ˜ao5.3 na p ´agina 320.
W
1= V
1= ( − 1, 0, − 1, 0, 1);
W
2= V
2− proj
W1V
2= (0, 0, 1, 1, 0) + 1
3 ( − 1, 0, − 1, 0, 1) = 1
3 ( − 1, 0, 2, 3, 1) W
3= V
3− proj
W1V
3− proj
W2V
3= ( − 1, 1, 0, 0, 0) − 1
3 ( − 1, 0, − 1, 0, 1) − 1
15 ( − 1, 0, 2, 3, 1)
= 1
5 ( − 3, 5, 1, − 1, − 2)
Agora, vamos “dividir” cada vetor pela sua norma para obtermos vetores de norma igual a
1
5.1 Produto Escalar em Rn 323
(unit ´arios).
U
1=
1
|| W
1||
W
1= ( − 1
√ 3 , 0, − 1
√ 3 , 0, 1
√ 3 ) U
2=
1
|| W
2||
W
2= ( − 1
√ 15 , 0, 2
√ 15 , 3
√ 15 , 1
√ 15 ) U
3=
1
|| W
3||
W
3= ( − 3 2 √
10 , 5 2 √
10 , 1 2 √
10 , − 1 2 √
10 , − 1
√ 10 )
5.1.2 Bases Ortogonais e Ortonormais
Definic¸ ˜ao 5.2. Seja
{ V
1, . . . , V
k}
uma base de um subespac¸o de Rn.(a) Dizemos que
{ V
1, . . . , V
k}
´e uma base ortogonal, seV
i· V
j= 0
, parai 6 = j
, ou seja, se quaisquer dois vetores da base s ˜ao ortogonais;(b) Dizemos que
{ V
1, . . . , V
k}
´e uma base ortonormal, se al ´em de ser uma base ortogonal,|| V
i|| = 1
, ou seja, o vetorV
i ´e unit ´ario, parai = 1, . . . m
.Exemplo 5.3. A base can ˆonica de Rn, que ´e formada pelos vetores
E
1= (1, 0, . . . , 0), E
2= (0, 1, 0, . . . , 0), . . . E
n= (0, . . . , 0, 1)
´e uma base ortonormal de Rn.
Exemplo 5.4. No Exemplo 5.2,
{ W
1, W
2, W
3}
´e uma base ortogonal de W e{ U
1, U
2, U
3}
´e uma base ortonormal de W.O resultado a seguir mostra que o procedimento usado noExemplo5.2conhecido comoprocesso de ortogonalizac¸˜ao de Gram-Schmidtpode ser aplicado a qualquer subespac¸o de Rn. NasFiguras 5.3 e 5.4 vemos como isto ´e poss´ıvel no caso em que o subespac¸o ´e oR3, j ´a que o R3 ´e subespac¸o dele mesmo.
Teorema 5.5. Seja
{ V
1, . . . , V
k}
uma base de um subespac¸o W de Rn. Ent ˜ao, existe uma base{ U
1, . . . , U
k}
de W que ´e ortonormal e tal que o subespac¸o gerado porU
1, . . . , U
j ´e igual ao subespac¸o gerado porV
1, . . . , V
j paraj = 1, . . . , k
.Demonstrac¸ ˜ao. (a) Sejam
W
1= V
1,
W
2= V
2− proj
W1V
2,
W
3= V
3− proj
W1V
3− proj
W2V
3, . . .
W
k= V
k− proj
W1V
k− proj
W2V
k. . . − proj
Wk−1V
k.
5.1 Produto Escalar em Rn 325
PelaProposic¸ ˜ao5.3, segue-se que
W
2 ´e ortogonal aW
1 eW
26 = ¯0
, poisV
1 eV
2 s ˜ao L.I. Assim,W
1 eW
2 formam uma base ortogonal do subespac¸o gerado porV
1 eV
2. Agora, supondo queW
1, . . . , W
k−1 seja uma base ortogonal do subespac¸o gerado porV
1, . . . , V
k−1, segue- se da Proposic¸ ˜ao 5.4, queW
k ´e ortogonal aW
1, . . . , W
k−1.W
k6 = ¯0
, pois caso contr ´ario,V
k pertenceria ao subespac¸o gerado porW
1, . . . , W
k−1 que ´e igual ao subespac¸o gerado porV
1, . . . , V
k−1 e assimV
1, . . . , V
k seriam L.D. ComoW
1, . . . , W
k s ˜ao ortogonais n ˜ao nulos, pela Proposic¸ ˜ao 5.2 na p ´agina 318, eles s ˜ao L.I. e portanto formam uma base do subespac¸o W. (b) Sejam, agoraU
1=
1
|| W
1||
W
1, U
2=
1
|| W
2||
W
2, . . . , U
k=
1
|| W
k||
W
k.
Assim,
{ U
1, . . . , U
k}
´e uma base ortonormal para o subespac¸oW.
Exerc´ıcios Num ´ericos (respostas na p ´agina 595)
5.1.1. Sejam
X = (1, 1, − 2)
eY = (a, − 1, 2)
. Para quais valores dea
,X
eY
s ˜ao ortogonais?5.1.2. Sejam
X = (1/ √
2, 0, 1/ √
2)
eY = (a, 1/ √
2, − b)
. Para quais valores dea
eb
, o conjunto{ X, Y }
forma uma base ortonormal do subespac¸o gerado por eles?5.1.3. Use o processo de ortogonalizac¸ ˜ao de Gram-Schmidt para encontrar uma base ortonormal para o subespac¸o de R4 que tem como base
{ (1, 1, − 1, 0), (0, 2, 0, 1), ( − 1, 0, 0, 1) }
.5.1.4. Use o processo de ortogonalizac¸ ˜ao de Gram-Schmidt para transformar a base do R3
{ (1, 1, 1), (0, 1, 1), (1, 2, 3) }
em uma base ortonormal doR3.5.1.5. Encontre uma base ortonormal para o subespac¸o de R3 que consiste de todos os vetores
(a, b, c)
tais quea + b + c = 0
.5.1.6. Encontre uma base ortonormal para o subespac¸o do R4 que consiste de todos os vetores
(a, b, c, d)
tais quea − b − 2c + d = 0
.5.1.7. Encontre uma base ortonormal para o espac¸o soluc¸ ˜ao do sistema homog ˆeneo
x + y − z = 0
2x + y + 2z = 0.
5.1.8. Considere as retas
(x, y, z) = t(1, 2, − 3)
e(x, y, z) = (0, 1, 2) + s(2, 4, − 6)
em R3. Encontre a equac¸ ˜ao geral do plano que cont ´em estas duas retas e ache uma base ortonormal para este plano. Complete esta base a uma base ortonormal de R3.Exerc´ıcios Te ´ oricos
5.1 Produto Escalar em Rn 327
5.1.9. Mostre que para todo vetor
V ∈
Rn e todo escalarα
,|| αV || = | α | || V || .
5.1.10. Mostre que se
V
´e ortogonal aW
, ent ˜aoV
´e ortogonal aαW
, para todo escalarα
.5.1.11. Mostre que se
V
´e ortogonal aW
1, . . . , W
k, ent ˜aoV
´e ortogonal a qualquer combinac¸ ˜ao linear deW
1, . . . , W
k.5.1.12. Sejam
X
,Y
eZ
vetores do Rn. Prove que seX · Y = X · Z
, ent ˜aoY − Z
´e ortogonal aX
. 5.1.13. Mostre que seW
1, . . . , W
k s ˜ao vetores n ˜ao nulos ortogonais entre si eX = α
1W
1+. . .+α
kW
k,ent ˜ao
X = proj
W1X + . . . + proj
WkX
.5.1.14. Sejam
V
1, . . . , V
k vetores linearmente dependentes. Mostre que, aplicando-se o processo de ortogonalizac¸ ˜ao de Gram-Schmidt aos vetoresV
1, . . . , V
k, se obt ´em um vetorW
i que ´e nulo, para algumi = 1, . . . , k
. (Sugest ˜ao: SejaV
i o primeiro vetor tal queV
i∈ [V
1, . . . , V
i−1] = [W
1, . . . , W
i−1]
e use o exerc´ıcio anterior.)5.1.15. Seja
S = { W
1, . . . , W
k}
uma base ortogonal de um subespac¸o WdeRn. Mostre que um todo vetorV
deW pode ser escrito comoV = V · W
1|| W
1||
2W
1+ V · W
2|| W
2||
2W
2+ . . . + V · W
k|| W
k||
2W
k.
(Sugest ˜ao: escreva
V = x
1W
1+ . . . + x
kW
k, fac¸a o produto escalar deV
comW
i e conclua quex
i=
||VW·Wi||i2, parai = 1, . . . , k
.)5.1.16. Mostre que o conjunto de todos os vetores doRn ortogonais a um dado vetor
V = (a
1, . . . , a
n)
, W= { X = (x
1, . . . , x
n) ∈
Rn| X · V = 0 }
´e um subespac¸o do Rn.5.1.17. Demonstre que, se
V
eW
s ˜ao vetores quaisquer do Rn, ent ˜ao:(a)
V · W =
14[ || V + W ||
2− || V − W ||
2]
(identidade polar);(b)
|| V ||
2+ || W ||
2=
12( || V + W ||
2+ || V − W ||
2)
(lei do paralelogramo).(Sugest ˜ao: desenvolva os segundos membros das igualdades acima observando que
|| V + W ||
2= (V + W ) · (V + W )
e|| V − W ||
2= (V − W ) · (V − W )
)5.1.18. Seja
{ U
1, . . . , U
n}
uma base ortonormal de Rn. SeA = [ U
1. . . U
n]
´e uma matrizn × n
cujas colunas s ˜ao os vetoresU
1, . . . , U
n, ent ˜aoA
´e invert´ıvel eA
−1= A
t. (Sugest ˜ao: mostre queA
tA = I
n, usando o fato de queU
i· U
j= U
itU
j.)5.1.19. Mostre que o ˆangulo entre dois vetores n ˜ao nulos
X = (x
1, . . . , x
n)
eY = (y
1, . . . , y
n)
de Rn, que ´e definido como sendo o n ´umero realθ
entre0
eπ
tal quecos θ = X · Y
|| X || || Y || ,
est ´a bem definido, ou seja, que existe um tal n ´umero real
θ
e ´e ´unico. (Sugest ˜ao: mostre, usando a desigualdade de Cauchy-Schwarz, que− 1 ≤ X · Y
|| X || || Y || ≤ 1
.)5.1.20. SejaWum subespac¸o deRn. Mostre que o conjunto de todos os vetores ortogonais a todos os vetores deW ´e um subespac¸o deRn. Este subespac¸o ´e chamado decomplemento ortogonal de We denotado por W⊥, ou seja,
W⊥
= { X ∈
Rn| X · Y = 0,
para todoY ∈
W} .
5.1 Produto Escalar em Rn 329
5.1.21. Mostre que todo subespac¸o W de Rn ´e o espac¸o soluc¸ ˜ao de um sistema linear homog ˆeneo.
(Sugest ˜ao: seja
{ W
1, . . . , W
k}
uma base deW⊥ tomeA = [ W
1. . . W
k]
t.)5.1.22. Embora n ˜ao exista o produto vetorial de dois vetores em Rn, para
n > 3
, podemos definir o produto vetorial den − 1
vetores,V
1= (v
11, . . . , v
1n), . . . , V
n−1= (v
(n−1)1, . . . , v
(n−1)n)
comoV
1× V
2× · · · × V
n−1=
"( − 1)
n+1det(v
ij)
j6=1, ( − 1)
n+2det(v
ij)
j6=2, . . . , ( − 1)
2ndet(v
ij)
j6=n.
Mostre que:
(a)
V
1× V
2× · · · × V
n−1 ´e ortogonal aV
1, . . . , V
n−1. (b)α(V
1× V
2× · · · × V
n−1) = V
1× · · · αV
i× · · · × V
n−1W V
W
V V−projWV
V−projWV
projWV projWV
Figura 5.1: Projec¸ ˜ao ortogonal do vetorV sobre o vetor W
5.1 Produto Escalar em Rn 331
projW
1V+projW 2V
projW 1V
projW 2V
V
V−projW
1V−projW 2V W1
W2
Figura 5.2: V −projW1V −projW2V ´e ortogonal a W1 e aW2
W1 =V1
V3
V2
projW 1V2
W2= V2−projW
1V2
Figura 5.3: W1 = V1 eW2 = V2−projW1V2
V3
W1
projW 1V3
W2
W3 = V3−projW
1V3
−projW 2V3
projW 2V3
projW
1V3+projW 2V3
Figura 5.4: W3 = V3−projW1V3−projW2V3
5.2 Subespac¸os Ortogonais 333
5.2 Subespac¸os Ortogonais
Se
N = (a, b, c)
´e um vetor n ˜ao nulo de R3, o conjunto dos vetores que s ˜ao ortogonais aN
, ´e um plano que passa pela origem e temN
como vetor normal. Neste caso dizemos que o plano ´e o subespac¸o ortogonal ao conjunto{ N }
.Definic¸ ˜ao 5.3. SejaSum subconjunto n ˜ao vazio de Rn. O complemento ortogonal de S, denotado por S⊥, ´e o conjunto de todos os vetores deRn que s ˜ao ortogonais a todo vetor deS. Ou seja,
S⊥
= { X ∈
Rn| X · Y = 0
para todoY ∈ S } .
Mesmo quando Sn ˜ao ´e um subespac¸o, S⊥ ´e um subespac¸o.
Proposic¸ ˜ao 5.6. SejaS um subconjunto de Rn. Ent ˜ao, o conjunto S⊥ ´e um subespac¸o.
Demonstrac¸ ˜ao. Vamos verificar as propriedades (a) e (b) na p ´agina246 que definem um subespac¸o.
(a) Sejam
X
1 eX
2 vetores de S⊥. Ent ˜ao,(X
1+ X
2) · Y = X
1· Y + X
2· Y = 0 + 0 = 0,
para todoY ∈ S
.(b) Seja
X ∈ S
⊥ eα
um escalar. Ent ˜ao,(αX ) · Y = α(X · Y ) = α0 = 0,
para todoY ∈ S
.
Exemplo 5.5. Se S
= { ¯0 } ⊂
Rn, ent ˜aoS⊥=
Rn. Se S=
Rn, ent ˜ao S⊥= { ¯0 }
.Exemplo 5.6. SejaS
= { N = (a
1, . . . , a
n) } ⊂
Rn. Ent ˜ao,S⊥
= { X = (x
1, . . . , x
n) ∈
Rn| a
1x
1+ . . . + a
nx
n= 0 } .
Exemplo 5.7. SejaS
= { V
1, . . . , V
m} ⊂
Rn, em queV
1= (a
11, . . . , a
1n), . . . , V
m= (a
m1, . . . , a
mn)
. Ent ˜ao,S⊥
= { X ∈
Rn| A X = ¯0 } ,
em queA = (a
ij)
m×n.
SeS
=
W ´e um subespac¸o, al ´em deW⊥ ser um subespac¸o, s ˜ao v ´alidas as propriedades a seguir.Proposic¸ ˜ao 5.7. Sejam Wum subespac¸o de Rn e W⊥ o seu complemento ortogonal. Ent ˜ao:
5.2 Subespac¸os Ortogonais 335
(a) Todo vetor de
V ∈
Rn se decomp ˜oe de maneira ´unica como uma soma de dois vetoresV
1 eV
2, sendoV
1 pertencente a W eV
2 pertencente a W⊥, ou seja, para todoV ∈
Rn existe um´unico
V
1∈
W e um ´unicoV
2∈
W⊥ tal queV = V
1+ V
2.
(b) O subespac¸o ortogonal de W⊥ ´e W, ou seja,(
W⊥)
⊥=
W.
Demonstrac¸ ˜ao. (a) Seja
V
um vetor qualquer deV. SejaW
1, . . . , W
m uma base ortogonal deW. DefinaV
1= proj
W1V +. . .+proj
WmV
. PelaProposic¸ ˜ao5.4na p ´agina320, o vetorV
2= V − V
1´e ortogonal a
W
k, parak = 1, . . . , m
. Logo,V
2 ´e ortogonal a todo vetor de W e portantoV
2∈
W⊥. Assim,V = V
1+ V
2, comV
1∈
WeV
2∈
W⊥.Sejam
X ∈
WeY ∈
W⊥ tais queV = X + Y
. Ent ˜ao,V
1= proj
W1V + . . . + proj
WmV = proj
W1(X + Y ) + . . . + proj
Wm(X + Y )
= proj
W1X + . . . + proj
WmX = X,
pois como
Y ∈
W⊥,proj
Wk(X + Y ) = proj
WkX
, parak = 1, . . . , m
e comoX ∈
W, pela Proposic¸ ˜ao 5.2 na p ´agina 318,X = proj
W1X + . . . + proj
WmX
.E
Y = V − X = V − V
1= V
2.
(b) Todo elemento de W claramente pertence a
(
W⊥)
⊥. Assim, W⊆ (
W⊥)
⊥. Falta mostrar que(
W⊥)
⊥⊆
W. SejaX ∈ (
W⊥)
⊥. Ent ˜ao,X = U + V
, em queU ∈
WeV ∈
W⊥. Assim,0 = X · V = (U + V ) · V = U · V + V · V = V · V = || V ||
2.
Conseq ¨uentemente,
V = ¯0
. Assim,X ∈
We(
W⊥)
⊥⊆
W. Portanto,(
W⊥)
⊥=
W.Seja Wum subespac¸o do Rn. Dado um vetor
V ∈
Rn, em virtude da Proposic¸ ˜ao 5.7 existe uma´unica decomposic¸ ˜ao
V = V
1+ V
2, comV
1∈
W eV
2∈
W⊥. O vetorV
1 ´e chamado projec¸ ˜ao ortogonal deV
no subespac¸o We ´e denotado porproj
WV
.Se
{ W
1, . . . , W
m}
´e uma base ortogonal de W, ent ˜ao decorre da demonstrac¸ ˜ao da Proposic¸ ˜ao 5.7 queproj
WV = proj
W1V + . . . + proj
WmV .
Exemplo 5.8. Seja W o subespac¸o gerado pelos vetores
V
1= (1, 0, 0, 0)
,V
2= (1, 1, 0, 0)
,V
3= ( − 4, − 4, 1, 1)
. SejaX = ( − 2, − 4, 0, 2)
. Vamos encontrarY ∈
WeZ ∈
W⊥ tais queX = Y + Z
. Basta tomarmosY = proj
WX
eZ = X − Y
.Para encontrar esta decomposic¸ ˜ao vamos aplicar o processo de ortogonalizac¸ ˜ao de Gram- Schmidt aos vetores
V
1, V
2 eV
3 obtendoW
1, W
2 eW
3 uma base ortogonal de W.W
1= V
1, W
2= V
2− proj
W1V
2= (0, 1, 0, 0), W
3= V
3− proj
W1V
3− proj
W2V
3= (0, 0, 1, 1).
Assim,
Y = proj
WX = proj
W1X + proj
W2X + proj
W3X = ( − 2, − 4, 1, 1)
eZ = X − Y = (0, 0, − 1, 1)
5.2 Subespac¸os Ortogonais 337
W2 =W⊥
1
W1 =W⊥
2
¯0
Figura 5.5: Complementos ortogonais
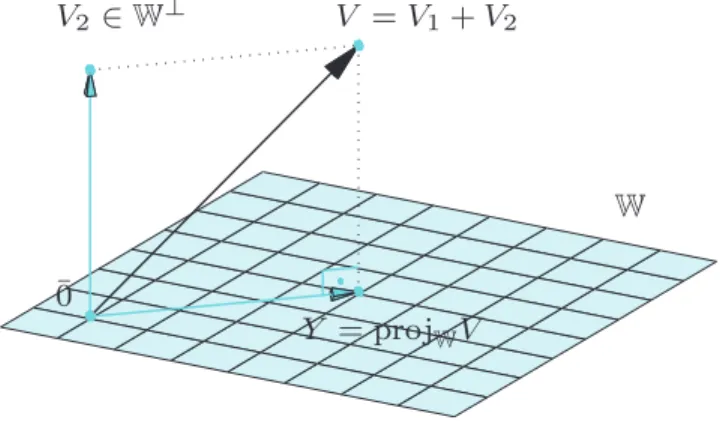
Y = projWV
W V =V1+V2
V2 ∈W⊥
¯0
Figura 5.6: Decomposic¸ ˜ao de um ponto V = V1 + V2, com V1 ∈ W, V2 ∈ W⊥
5.2.1 Subespac¸os Fundamentais
Lembramos que a imagem de uma matriz
A
,m × n
, ´e o subespac¸o definido por I(A) = { Y ∈
Rm| A X = Y
para algumX ∈
Rn} ,
que ´e igual ao espac¸o coluna de
A
(Proposic¸ ˜ao 4.17 na p ´agina 289). Lembramos tamb ´em que o n ´ucleo deA
´e definido porN
(A) = { X ∈
Rn| A X = ¯0 } .
J ´a vimos que
dim(
N(A)) + dim(
I(A)) = n
(Teorema 4.18 na p ´agina 289). Observe que enquanto N(A)
´e um subespac¸o do Rn, I(A)
´e um subespac¸o do Rm. Mas,I(A
t)
´e tamb ´em um subespac¸o de Rn e N(A
t)
´e um subespac¸o do Rm. Assim, N(A)
e I(A
t)
s ˜ao subespac¸os do Rn e N(A
t)
e I(A)
s ˜ao subespac¸os do Rm e s ˜ao v ´alidas as seguintes relac¸ ˜oes de ortogonalidade.5.2 Subespac¸os Ortogonais 339
Teorema 5.8. Se
A
´e uma matrizm × n
, ent ˜ao (a) N(A) =
I(A
t)
⊥.(b) N
(A
t) =
I(A)
⊥.Demonstrac¸ ˜ao. (a) Um vetor
V
pertence ao n ´ucleo deA
se, e somente se,AV = ¯0
. Isto acon- tece se, e somente se,AV
´e ortogonal a todo vetorY ∈
Rm, ou seja, se, e somente se,Y
tAV = 0
para todo vetorY ∈
Rm. Esta equac¸ ˜ao ´e equivalente a sua transposta, ou seja,V
tA
tY = 0
. Variando-seY
em Rm,A
tY
percorre toda a imagem deA
t. Assim,V
tA
tY = 0
, para todoY ∈
Rm se, e somente se,V ∈
I(A
t)
⊥. Portanto,V ∈
N(A)
se, e somente se,V ∈
I(A
t)
⊥.(b) Basta aplicar o item anterior a
A
t.
5.2.2 Problema de Quadrados M´ ınimos
Muitos problemas, quando modelados, levam a sistemas lineares
A X = B
, que s ˜ao inconsisten- tes (isto ´e, n ˜ao possuem soluc¸ ˜ao), apesar dos problemas que os originaram requererem soluc¸ ˜ao. A inconsist ˆencia vem com freq ¨u ˆencia devido a erros experimentais na matrizB
. Uma forma de resolver esta inconsist ˆencia ´e resolver o problema de quadrados m´ınimos associado, ou seja,min || A X − B ||
2.
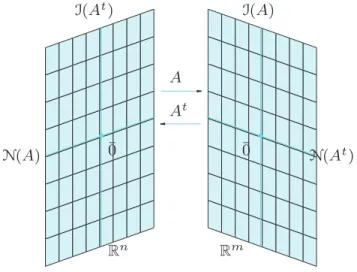
I(A) I(At)
A At
¯0 N(At)
¯0 N(A)
Rn Rm
Figura 5.7: Subespac¸os N(A),I(At), I(A) eN(At)
Q
W B
¯0
Figura 5.8: Ponto em um subespac¸o mais pr ´oximo do pontoB
5.2 Subespac¸os Ortogonais 341
Apesar de n ˜ao ser esta a ´unica forma de resolver a inconsist ˆencia, pode-se mostrar que se os erros em
B
forem n ˜ao viciados e osb
i tiverem a mesma vari ˆancia (fixa), ent ˜ao a soluc¸ ˜ao do problema de quadrados m´ınimos ´e a que tem a menor vari ˆancia dentro de um certo conjunto de “soluc¸ ˜oes”.O teorema seguinte ´e a chave para a soluc¸ ˜ao do problema de quadrados m´ınimos.
Teorema 5.9. Seja
A
uma matrizm × n
. O problema de quadrados m´ınimos:min || AX − B ||
2´e equivalente a resolver o sistema linear consistente
A
tAX = A
tB,
chamado de sistema de equac¸ ˜oes normais.Demonstrac¸ ˜ao. O problema de quadrados m´ınimos
min || AX − B ||
2 pode ser escrito comoY
min
∈I(A)|| Y − B ||
2 eY = A X.
(5.4) Seja W=
I(A)
. Segue da Proposic¸ ˜ao 5.7 na p ´agina 334 que existe uma ´unica decomposic¸ ˜ao deB
comoB = Q + Z,
em que
Q ∈
WeZ ∈
W⊥. Vamos mostrar queY
min
∈W|| B − Y || = || B − Q || .
SejaY
um vetor qualquer deW. Temos que|| Y − B ||
2= || (Y − Q) + (Q − B) ||
2= || Y − Q ||
2+ 2(Y − Q) · (Q − B) + || B − Q ||
2.
Mas,(Y − Q) · (Q − B) = Q · (B − Q) − Y · (B − Q) = 0,
poisY, Q ∈
W eB − Q = Z ∈
W⊥. Logo,|| Y − B ||
2= || (Y − Q) + (Q − B) ||
2= || Y − Q ||
2+ || B − Q ||
2.
(5.5) VariandoY
em W, vemos de (5.5) que o m´ınimo de|| Y − B ||
ocorre somente paraY = Q
, j ´a que|| B − Q ||
2 permanece fixo em (5.5) quando variamosY
em W. Portanto,Y
min
∈W|| B − Y || = || B − Q || ,
em que o ponto
Q
´e tal queB − Q ∈
W⊥. Assim, a soluc¸ ˜ao do problema (5.4) ´e um pontoX ∈
Rn tal queB − A X ∈
I(A)
⊥. Mas, Pelo Teorema 5.8 I(A)
⊥=
N(A
t)
. Assim,X
´e tal queA
t(B − AX ) = ¯0.
Ou seja, a soluc¸ ˜ao do problema de quadrados m´ınimos ´e a soluc¸ ˜ao do sistema linear
A
tA X = A
tB.
5.2 Subespac¸os Ortogonais 343
AX = ˆB B
¯0 X
Rn Rm
Figura 5.9: A soluc¸ ˜ao de quadrados m´ınimos
−4 −3 −2 −1 0 1 2 3 4
−1 0 1 2 3 4 5 6 7
x y
Figura 5.10: Reta que “melhor” se ajusta a quatro pontos
Exemplo 5.9. Vamos determinar a reta de equac¸ ˜ao
y = ax + b
que melhor se ajusta aos pontosP
1= ( − 3, 6), P
2= (0, 4), P
3= (1, 0)
eP
4= (2, 2)
no sentido de quadrados m´ınimos, ou seja, tal que4
X
i=1
(y
i− ax
i− b)
2 seja m´ınimo. Substituindo-se estes pontos na equac¸ ˜ao da reta obtemos o seguinte sistema
− 3a + b = 6 b = 4 a + b = 0 2a + b = 2
Para este sistema temos que
A =
− 3 1 0 1 1 1 2 1
e
B =
6 4 0 2
. Para encontrar a soluc¸ ˜ao de quadrados
m´ınimos deste sistema temos que resolver as equac¸ ˜oes normais
A
tAX = A
tB
. Neste caso,A
tA =
14 0 0 4
e
A
tB =
− 14 12
Assim a soluc¸ ˜ao de quadrados m´ınimos ´e
X = [ − 1 3]
t, oua = − 1, b = 3
. A retay = − x + 3
´e a reta procurada.Exemplo 5.10. Vamos determinar a par ´abola de equac¸ ˜ao
y = ax
2+ bx + c
que melhor se ajusta aos pontosP
1= ( − 2, 0), P
2= ( − 1, 2), P
3= (1, 2)
eP
4= (2, 10)
no sentido de quadrados m´ınimos, ou seja, tal que4
X
i=1
(y
i− ax
2i− bx
i− c)
2 seja m´ınimo. Substituindo-se estes pontos na equac¸ ˜ao da5.2 Subespac¸os Ortogonais 345
par ´abola obtemos o seguinte sistema
4a − 2b + c = 0
a − b + c = 2
a + b + c = 2
4a + 2b + c = 10
Para este sistema temos que
A =
4 − 2 1 1 − 1 1 1 1 1 4 2 1
e
B =
0 2 2 10
. Para encontrar a soluc¸ ˜ao de
quadrados m´ınimos deste sistema temos que resolver as equac¸ ˜oes normais
A
tAX = A
tB
. Aqui,A
tA =
34 0 10 0 10 0 10 0 4
e
A
tB =
44 20 14
Escalonando a matriz aumentada
[A
tA | A
tB]
obtemos que a soluc¸ ˜ao de quadrados m´ınimos ´eX = [1 2 1]
t, oua = 1, b = 2
ec = 1
. Ey = x
2+ 2x + 1
´e a equac¸ ˜ao da par ´abola procurada.Exemplo 5.11. Vamos determinar o c´ırculo de equac¸ ˜ao
x
2+ y
2= ax + by + c
que melhor se ajusta aos pontosP
1= ( − 2, 0), P
2= (0, 2), P
3= (1, − 3)
eP
4= (3, 1)
no sentido de quadrados m´ınimos, ou seja, tal que4
X
i=1
(x
2i+ y
i2− ax
i− by
i− c)
2 seja m´ınimo. Substituindo-se estes pontos na equac¸ ˜ao−8 −6 −4 −2 0 2 4 6 8
−2 0 2 4 6 8 10 12 14
x y
Figura 5.11: Par ´abola que “melhor” se ajusta a quatro pontos
−2 −1 0 1 2 3 4
−4
−3
−2
−1 0 1 2 3
x y
Figura 5.12: C´ırculo que “melhor” se ajusta a quatro pontos
5.2 Subespac¸os Ortogonais 347
do c´ırculo obtemos o seguinte sistema
− 2a + c = 4
+ 2b + c = 4 a − 3b + c = 10 3a + b + c = 10
Para este sistema temos que
A =
− 2 0 1 0 2 1 1 − 3 1 3 1 1
e
B =
4 4 10 10
. Para encontrar a soluc¸ ˜ao de
quadrados m´ınimos deste sistema temos que resolver as equac¸ ˜oes normais
A
tAX = A
tB
. Aqui,A
tA =
14 0 2 0 14 0 2 0 4
e
A
tB =
44 20 14
Escalonando a matriz aumentada
[A
tA | A
tB]
obtemos que a soluc¸ ˜ao de quadrados m´ınimos ´eX = [18/13 − 6/7 82/13]
t, oua = 18/13, b = − 6/7
ec = 82/13
. A equac¸ ˜ao do c´ırculo procurado ´ex
2+ y
2− (18/13)x + (6/7)y = 82/13
. O centro do c´ırculoP
0= (x
0, y
0)
e o raior
s ˜ao obtidos pelas equac¸ ˜oesa = 2x
0, b = 2y
0 er
2= c + x
20+ y
02. Assim,x
0= 9/13, y
0= − 3/7
er =
q57724
8281
≈ 2, 6
.Exerc´ıcios Num ´ericos (respostas na p ´agina 600)
5.2.1. Para cada uma das seguintes matrizes determine uma base para cada um dos seguintes subespac¸os I
(A
t),
N(A),
I(A)
e N(A
t)
.(a)
4 − 2
1 3
2 1
3 4
(b)
1 0 0 0 0 1 1 1 0 0 1 1 1 1 2 2
5.2.2. SejaWo subespac¸o deR3 gerado por
V = (1, − 1, 1)
. Encontre uma base para W⊥ e d ˆe uma interpretac¸ ˜ao geom ´etrica para W eW⊥.5.2.3. Seja W o subespac¸o do R4 gerado pelos vetores
V
1= (1, 0, − 2, 1)
eV
2= (0, 1, 3, − 2)
. Encontre uma base para W⊥.5.2.4. Encontre a equac¸ ˜ao da par ´abola que melhor se ajusta aos pontos dados no sentido de quadra- dos m´ınimos, ou seja, tal que
4
X
i=1
(y
i− ax
2i− bx
i− c)
2 seja m´ınimo:(a)
P
1= ( − 2, 1), P
2= ( − 1, 2), P
3= (1, 0)
eP
4= (2, 7)
. (b)P
1= ( − 2, 1), P
2= ( − 1, 3), P
3= (1, 3)
eP
4= (2, 11)
.5.2.5. Encontre a equac¸ ˜ao do c´ırculo que melhor se ajusta aos pontos dados no sentido de quadrados m´ınimos, ou seja, tal que
4
X
i=1
(x
2i+ y
i2− ax
i− by
i− c)
2 seja m´ınimo:(a)
P
1= ( − 2, 0), P
2= (0, 1), P
3= (1, − 2)
eP
4= (2, 1)
. (b)P
1= ( − 2, 1), P
2= ( − 1, − 2), P
3= (0, 1)
eP
4= (2, 0)
.5.2 Subespac¸os Ortogonais 349
5.2.6. Encontre a soluc¸ ˜ao de quadrados m´ınimos dos seguintes sistemas:
(a)
x + 2y = 3 2x + 4y = 2
− x − 2y = 1
(b)
− x + y = 10 2x + y = 5 x − 2y = 20
(c)
x + y + z = 4
− x + y + z = 2
− y + z = 1
x + z = 2
Exerc´ıcios usando o M ATLAB
r5.2.7. (a) Use o comando P=randi(5,2), para gerar
5
pontos com entradas inteiras e aleat ´orias entre− 5
e5
. Os pontos est ˜ao armazenados nas linhas da matriz P.(b) Use o MATLABr para encontrar os coeficientes
a, b, c
ed
da func¸ ˜ao polinomialp(x) = ax
3+ bx
2+ cx + d
que melhor se ajusta aos pontos dados pelas linhas da matriz P, no sentido de quadrados m´ınimos, ou seja, tal queP(y
i− ax
3i− bx
2i− cx − d)
2 seja m´ınimo.A matriz A=matvand(P(:,1),3) pode ser ´util na soluc¸ ˜ao deste problema, assim como a matriz B=P(:,2).
(c) Desenhe os pontos e o gr ´afico do polin ˆomio com os comandos
clf,po(P), syms x, plotf1(a*x^3+b*x^2+c*x+d,[-5,5]), em que a,b,c e d s ˜ao os coeficientes j ´a encontrados. Desenhe os eixos coordenados com o comandoeixos. 5.2.8. (a) Use o comando P=randi(6,2), para gerar
6
pontos com entradas inteiras e aleat ´oriasentre
− 5
e5
. Os pontos est ˜ao armazenados nas linhas da matriz P.(b) Use o MATLABr para encontrar os coeficientes