A Academia da Força Aérea sempre contribuiu para o conhecimento em todos os anos de sua existência. Rui José dos Santos Pedroso Pinheiro de Freitas, Major-General Piloto Aviador Comandante da Academia da Força Aérea.
Índice
Gabriel Santos, aluno tenente do Mestrado Integrado em Aeronáutica Militar na Especialidade de Engenharia Eletrotécnica. Luis Santos, Aluno Bandeira do Mestrado Integrado em Aeronáutica Militar na Especialidade de Engenharia Eletrotécnica.
A PROJEÇÃO DA UNIÃO EUROPEIA COMO UM ATOR GLOBAL ATRAVÉS DA SUA AÇÃO NO SAHEL
O ESTUDO DE CASO DO MALI
- O conflito no Mali – Análise PMESII-PT
- Fator Militar
- Fator Económico
- Fator Sociocultural
- Fator Infraestrutura
- Fator Informação
- Fator Ambiental
- A Política Comum de Segurança e Defesa
- Panorâmica geral das intervenções internacionais no Mali
- A abordagem europeia no Mali: Estratégias e Instrumentos Operacionais
- A ajuda financeira da UE para o Mali
- Forças
- Fraquezas
- Oportunidades
- Constragimentos
No quadro da articulação entre segurança e desenvolvimento, a UE dispõe de duas missões PCSD – a EUTM Mali e a EUCAP Sahel Mali – e diversos instrumentos financeiros de apoio ao desenvolvimento do país. A projeção da União Europeia como ator global através das suas ações no Sahel: o estudo de caso do Mali. pela presença de Portugal, ao longo da última década, em missões da UE, ONU e multilaterais, refletindo a complementaridade de esforços das várias organizações para a consecução da paz e segurança internacionais. 2015) Tomada de decisão reduzindo a incerteza em sistemas complexos de sistemas.
CIBERESPAÇO: DOMÍNIO ESTRATÉGICO DA SOBERANIA DE UM ESTADO
Contextualização e Problemática
Identificar os atores considerados 'referenciais' dentro de cada um dos modelos de governança do ciberespaço estudados e discutir a posição adotada por cada um neste contexto; O modelo multistakeholder tem precedência sobre o modelo de soberania cibernética em relação à governança do ciberespaço para construir e consolidar um domínio seguro e aberto.
A adoção do modelo de Cyber Sovereignty, poderá, paradoxalmente, resultar numa redução da sua soberania, através da perda de flexibilidade de ação e do abrandamento do desenvolvimento tecnológico, causados pelo
- União Europeia
- Rússia
Como mencionado anteriormente, o desenvolvimento do ciberespaço levou ao surgimento de um grande número de ameaças e perigos para seus usuários. A NATO Cyber Industry Partnership (NCIP) que visa aumentar a cooperação entre os Estados membros da aliança e o setor privado de cada um deles no contexto do ciberespaço e sua segurança.
A COVID-19 E O REFORÇO DA RESILIÊNCIA DA UE FACE A AMEAÇAS SANITÁRIAS TRANSFRONTEIRIÇAS
- Introdução
- Apresentação do Objeto de Estudo
- Metodologia, Pergunta de partida, Objetivos e Enquadramento Teórico-conceptual
- As Competências e os Instrumentos do Quadro Sanitário da UE
- A Resposta dos Estados-Membros e da UE à Pandemia da Covid-19
- Os Limites da Cooperação Intergovernamental e o Reforço do Mandato da UE
As evidências mostram que o quadro da UE para as ameaças sanitárias transfronteiriças ainda é muito fragmentado. Construir uma União Europeia da Saúde: tornar a UE mais resiliente às ameaças sanitárias transfronteiriças - COM(2020) 724 final.
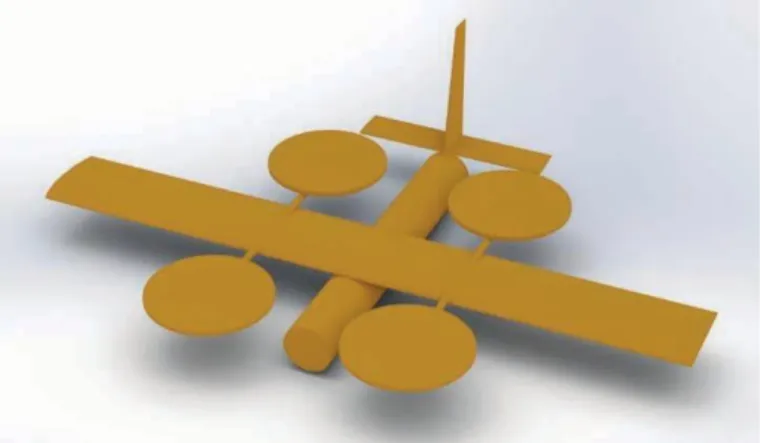
AERODYNAMIC DETAILED DESIGN OF AN UNMANNED AERIAL VEHICLE WITH VTOL CAPABILITIES
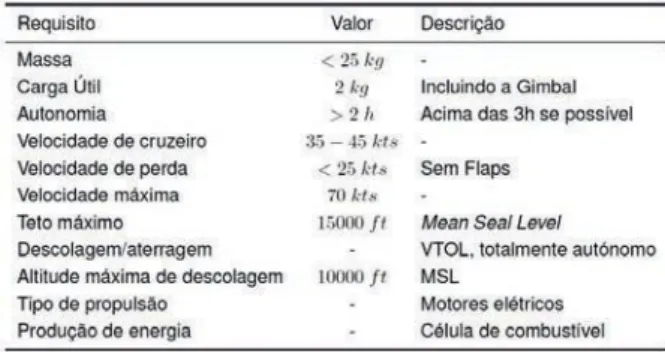
- Initial Design Requirements
- Design Features
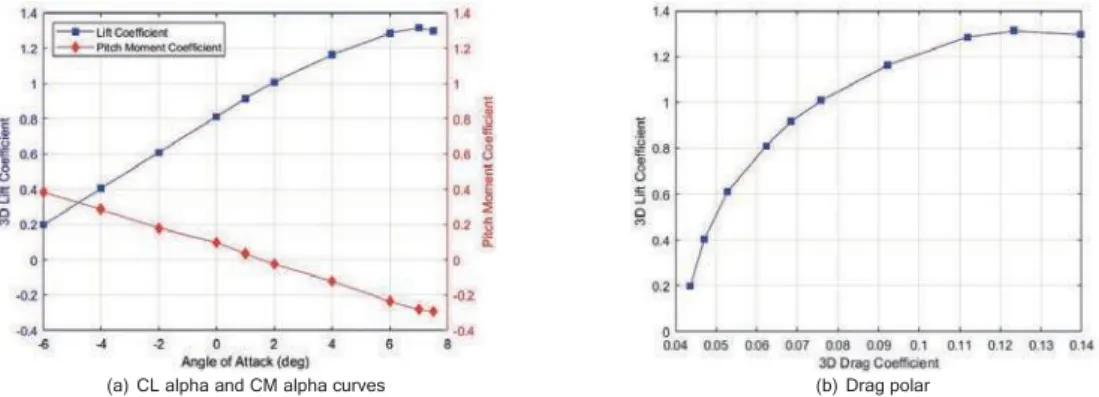
- Computational Fluid Dynamics
- Drag Build-Up
- Preliminary Characteristics of the UAV
- VTOL System Wind Tunnel Testing
- Full Plane Analysis
- VTOL System Integration
For the tail geometry, an inverted V-tail prevents the propeller wake and the downwash from the wing from disturbing the tail. With the update of the UAV characteristics complete, the preliminary design phase of the project is complete.

MULTIDISCIPLINARY OPTIMISATION OF AN UNMANNED AERIAL VEHICLE WITH A FUEL CELL POWERED ENERGY
SYSTEM
Abstract
1 Introduction
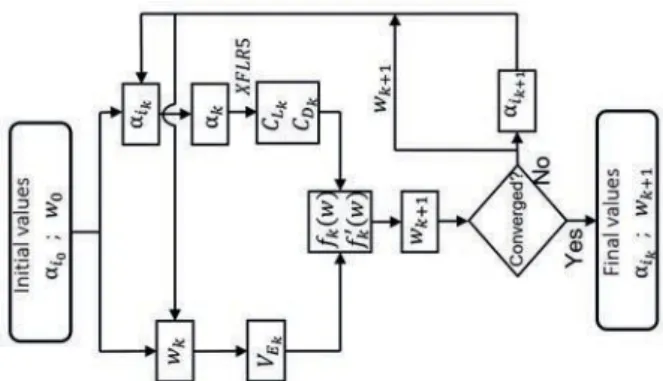
2 Methods
Multi-Objective Optimisation
A Multi-Disciplinary Approach to Aircraft Design
Finally, in the wingbox model used, the location of the shear center is also needed. Second, analytic partial derivatives of the output (mesh) with respect to the inputs (taper and offset) were defined.
3 Results
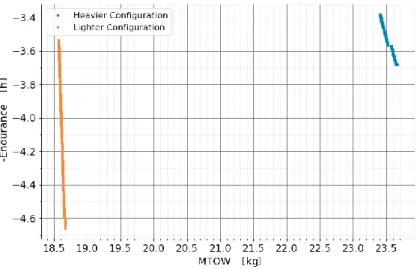
Conceptual Aircraft Design Using Multi-Objective Optimisation
For simplicity, it was assumed that the derivative of the mesh with respect to the offset would be zero, hence this parameter cannot be used as a design variable. Another parameter with great uncertainty is the estimated weight of the hydrogen tank, as it was estimated with a constant ratio and the amount of hydrogen needed.
Next Generation UAV Design
- Optimisation With Geometric Twist
- Optimisation With Taper, Chord at Root and Wingspan
- Final Optimal Solution
Using wing twist as the only design variable was not enough to improve baseline UAV performance. The constraint was verified to be active for two of the previously found optimal solutions.
4 Conclusion
There was a reduction of the wing area, which was realized with λ = 0.44, slip = 0.272 m and an increase in the wingspan. The absence of a stall constraint allowed the optimizer to take advantage of the problem formulation.
Aerodynamically detailed design of an unmanned aerial vehicle with a fuel cell-powered energy system (unpublished master's thesis). Long-term strategy for the development of low greenhouse gas emissions of the european union and its member states.
Background and Motivation
Countless contributions have been made over the years to the creation and refinement of various forms of FC, with the first applications only being validated in the twentieth century. The use of this energy source in UAVs began in the twenty-first century, when it was tried in various aircraft.
Objectives
Years later, in 1962, he joined Energy Conversion, an industrial corporation that, in collaboration with Pratt & Whitney, created the first FC that was used in the Apollo space program (Blomen & Mugerwa, 2013). The Portuguese Air Force (FAP), a mission-based institution, is working to use hydrogen as an energy source in the operation of its assets.
Payload
2 Literature and Technology Review
Market Research
Propulsive System
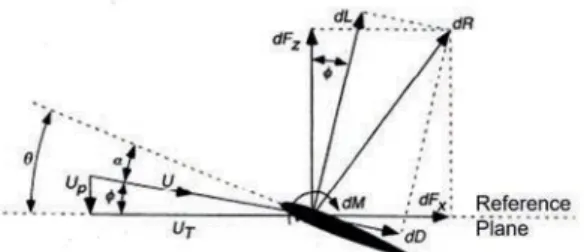
- Propeller - Blade Element Theory
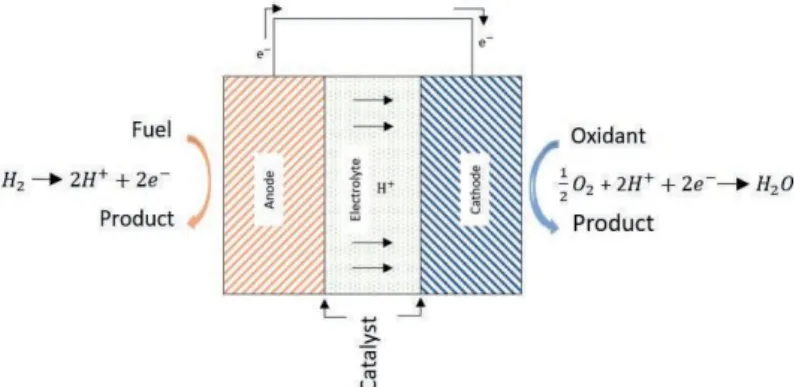
- Fuel Cell
To generate power, heat and water, H2O, this appears as a reactant hydrogen, H2, and oxygen, O2. In that case, new approximation models, such as the turbulence model, must be introduced to close the system of equations.
3 Conceptual Design - Performance Considerations
The take-off mass for the upper limit is set at the highest figure in the specifications – 25 kg. Based on the market survey and analysis of numerous FCs, the Intelligent Energy components were selected as having the best power-to-weight ratio among the FCs in the analysis.
4 Preliminary Design
The disc loading, induced power factor, ki, rotor solidity, airfoil drag coefficient, CD0 and Mach peak were all considered in the early calculations for the conceptual design of the rotors. These characteristics were determined at this early stage of the research based on the bibliography, particularly in Leishman (2006).
5 Detailed Design Phase – Theoretical-Practical Analysis
Blade Element Theory
Following the selection of the two FCs in the previous chapter and an initial study of fuel tanks, a trade-off study was carried out at this stage of the project to determine which choice of FC - the set of fuel tanks to be used was the best. . At the end of this phase, batteries for use with a FC as well as batteries for VTOL mode were selected, followed by the weight of the propulsion system and the energy system being installed as the mode in Table 6, corresponding to 45.6% of the aircraft's total mass .
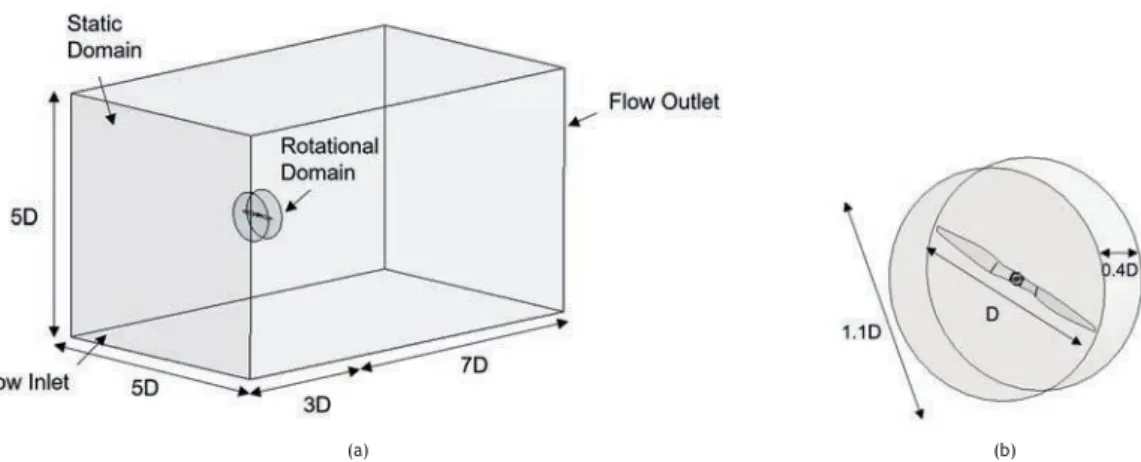
Computational Fluid Dynamics
After determining the local improvements in the computational domain described previously, a mesh convergence analysis was performed for each helix under consideration, referring to the size of the elements in each region. The number of elements per mesh, the value of the variables of interest and the corresponding error with respect to the finest mesh for the 20x10E helix can be found in Table 7.
6 Detailed Design Phase – Experimental Analysis
Wind Tunnel Analysis
Propulsion system detailed design of an unmanned aerial vehicle with VTOL capabilities and a hydrogen fuel cell. a) Wind tunnel results for the 20x10E propeller (b) Wind tunnel results for the 22x7.4 rotor Figure 11: Box diagram of the wind tunnel results.
Global Results Comparison
According to the results of the analysis performed on the y+ parameter at low rpm, after reducing the variable, the relative error is predicted to increase with decreasing RPM. As a result, the proposed process is validated, allowing a more economical examination of the propulsion assembly without the use of a wind tunnel.
7 Conclusions and Recommendations
95 As a future development, a CFD analysis of the propulsion system in the configuration pusher is proposed. As a result, it is proposed to model the fuselage of the produced UAV and incorporate the propeller.
PROJETO ESTRUTURAL DE UM VEÍCULO AÉREO NÃO TRIPULADO COM UMA CÉLULA DE COMBUSTÍVEL DE HIDROGÉNIO
- Materiais Compósitos
- Análise Estrutural
- Método Numérico com Recurso a Análise de Elementos Finitos
- Modelo de Estimativa do Peso Inicial
- Envelope de Voo
- Dimensionamento Analítico da Longarina Principal
- Seleção de Materiais e Respetivas Propriedades Mecânicas
- Projeto da Longarina da Asa
- Distribuição de Massa e Centro de Gravidade
- Modelo de Elementos Finitos
- Estudo Paramétrico da Longarina da Asa
- Estudo da Convergência da Malha
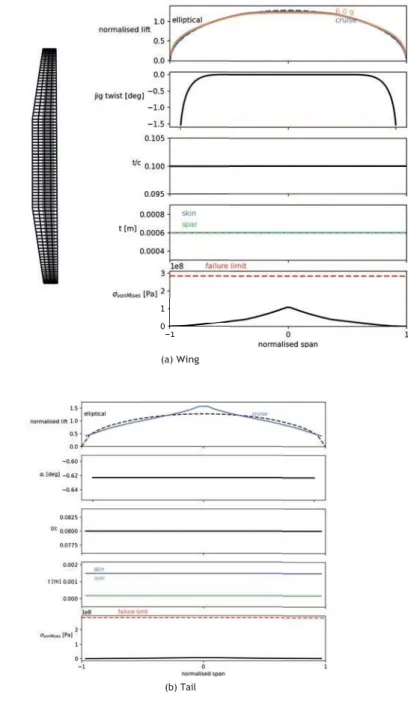
Observe que as cargas distribuídas são aplicadas em todas as superfícies da longarina (flanges e almas). Como esperado, verificou-se que a tensão máxima ocorreu na raiz da longarina principal, mais especificamente na superfície externa da asa visível na Fig.13(a).
COVERAGE IMPROVEMENT OF NAVIGATION AND COMMUNICATION AERONAUTICAL SERVICES BASED IN THE AZORES
- Aeronautical Communications System Under Study
- Application Scenario
- Application Scenario
- Application Scenario
- Definition of Scenarios
- Omnidirectional Stations
- Sectorial Stations
In the second scenario, the antennas at two thirds of the maximum height of the support tower have been taken into account. In subsequent tests, it was found that the antennas were about two-thirds of the support tower's maximum height.

3D HEAD POSE ESTIMATION AND MOVEMENT CLASSIFICATION FROM 2D DATA
Motivation
Although this may be perceived as a simple task, it is not and can be even more challenging for the robot as it requires sensing the user's posture. With this algorithm, the robot could know what type of head movement the user is making and respond to it effectively.
Contributions
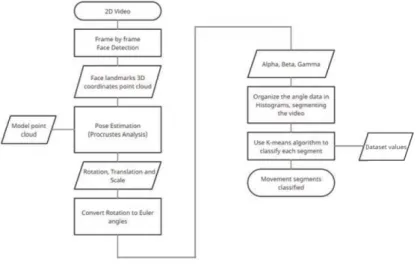
From time series head pose data, it is possible to analyze, segment and classify the data to understand what kind of movement the user is making according to a set of data. This information can be used to make a robotic arm perform better and determine a better trajectory in order to interact with the user.
2 Background
Face Detection
A correct functioning of the robotic arm would be to move the spoon into the user's mouth, for people who cannot move at all. It is capable of acquiring food from a static board using a demonstration of a kick trajectory, tracking whether the acquisition of the food was successful, real-time tracking of the user's mouth position and real-time adjustment of the trajectory of the robotic end effector from the board to the user's mouth.
Classification Methods
It allowed the user to choose between seven different types of food using buttons and the robot would move, along a predetermined path, from the plate to the location of the user's mouth. For example, it would be preferable to leave some distance between the end effect and the user's mouth if the user was able to lean their upper body forward so they could reach the spoon whenever they wanted.
3 Head Pose and Movement Analysis
- Face Detection
- Pose Estimation .1 Procrustes problem
- Movement Descriptor
- Histogram segmentation
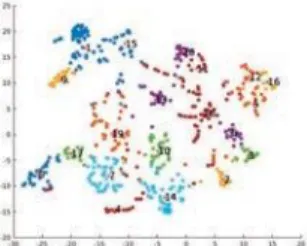
- K-means classification
- Verification and Validation .1 Face detection evaluation
- R, S and T validation
For example, the type of person is not taken into account when the trajectory of the end effect is predetermined. This method is then applied to one video, where the subject's motion types are known, and to another video, where the details of the motion are unknown.
4 Dataset
Data model
Subjects
Types of Movement
5 Results
It is now possible to use the K-nearest neighbors algorithm (Altman, 1992) to compare the data from each video with the centroid data. The scale factor s and the translation t can be used to further differentiate the rates, although this is not addressed in this work.
6 Conclusions
Future Work
Improved performance of k-means clustering using sum of squared error (sse) optimized using elbows method.
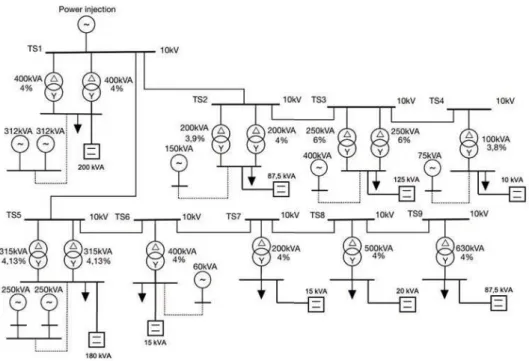
QUALITY AND MANAGEMENT OF A MV-LV GRID
ANALYSIS OF THE POWER NETWORK AND OPTIMIZATION CONSIDERING NEW STRATEGIES
This methodology involves the solution of an optimization problem that can be achieved using a computer tool. The program is developed based on NSGA-II (as cited in Deb, Pratap, Agarwal, and Meyarivan (2002) and Konak, Coit, and Smith (2006)), where evaluation of optimization strategies can be completed.
2 Optimization of Sintra’s Military Complex power distribution network regard- ing energy efficiency
Modeling Sintra’s Military Complex power distribution network
Quality and management of an MV-LV network: analysis of the power network and optimization taking into account new strategies. Quality and management of an MV-LV network: analysis of the power network and optimization taking into account new strategies.
Power losses and optimization strategies
Furthermore, PR can be defined by Equation 15, where I(x) is the investment cost, CF is the sum of the cash flows and years are the years in which the project will generate a financial return. Therefore, CF can be calculated by Equation 16, which indicates that the resulting PR is an updated variable, and years depend on the characteristics of the project and the organization's point of view.
3 Methodology
- The mathematical formulation of the multiobjective optimization problem
- Definition of power consumption scenarios
- Development of a computational tool for solving the multiobjective optimization problem The computational tool used for solving the multiobjective optimization problem is based on NSGA-II due to its short
- Decision-making process based on the MP Approach
Due to the lack of real-time electricity consumption data, there is uncertainty regarding the definition of load profiles. If there are violations, the power of the capacitor banks to be installed is calculated according to the Schneider Electric catalog (in Electric (2020)).
![Table 1: Definition of the scenarios considered for the optimization Scenario Definition S [kVA]](https://thumb-eu.123doks.com/thumbv2/123dok_br/19318156.0/153.680.219.462.566.655/table-definition-scenarios-considered-optimization-scenario-definition-kva.webp)
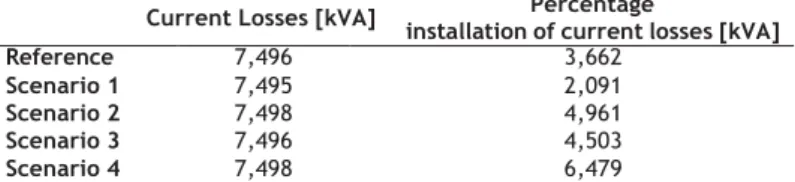
4 Results
Furthermore, the reduction of power losses shown in Table 2 depends on the implementation of the four optimization strategies considered in this investigation. Limiting the topological reconfiguration strategy to the installation of a power line between TS 4 and TS 9;.
5 Conclusions
The study of the applicability of traditional strategies in terms of power loss mitigation for the considered power network;. The investigation into the feasibility of the considered strategies in terms of grid reliability, taking into account the associated decrease in energy efficiency.
CONTROLO DE VOO DE FORMAÇÃO PARA MISSÕES DE BUSCA EM AMBIENTE MARÍTIMO COM UAVS
- Enquadramento e Motivação
- Missões com interesse de utilização de voo cooperativo/de formação
- Classificação de estruturas multi-UAV
- Arquitetura de controlo de UAVs
- Métodos de voo de formação
- Escolha do padrão de busca a implementar
- Footprint dos Sensores
- Arquitetura escolhida
Inicialmente, são estudadas as principais referências para controle de movimento e busca marítima de UAV. Os resultados obtidos permitem validar o projeto realizado, que consiste numa versão preliminar de uma solução de aeronave de treino para utilização em missões de busca em ambiente marítimo.
![Figura 1: Representação gráfica das classificações de sistemas multi-UAV: (a) acoplamento físico, (b) formação, (c) swarm e (d) cooperação intencional (retirado de [14])](https://thumb-eu.123doks.com/thumbv2/123dok_br/19318156.0/163.680.259.436.252.402/representação-gráfica-classificações-sistemas-acoplamento-formação-cooperação-intencional.webp)
DESIGN OF A FIXED-WING TILT-ROTOR QUADCOPTER CLASS I MINI UNMANNED AIRCRAFT – PROPULSION
- UAS Classification
- Aircraft Design Process
- UAS Propulsion Systems
- Propellers and the Blade Element Theory
- Computational Verification Methods
- Quadcopter Dynamics
- Flight Tests
- Tail Sizing Revision
- Center of Gravity Position
- Fuselage
- Landing Gear
- Required Thrust
- Selecting the Propulsion System Components
- Selecting the Propellers
- Propulsion System Configuration Selection
- Recommendations for Further Studies
Changed from ∗ = 0.401 to = 0.6 to increase the longitudinal stability of the aircraft. Given the nature of aircraft control (via servomotors, which keep the control surfaces fixed), the Center of Gravity (CG) envelope is determined through a single estimate of the stick-fixed neutral point position ( 𝑁𝑃) (Gudmundsson, 2014).
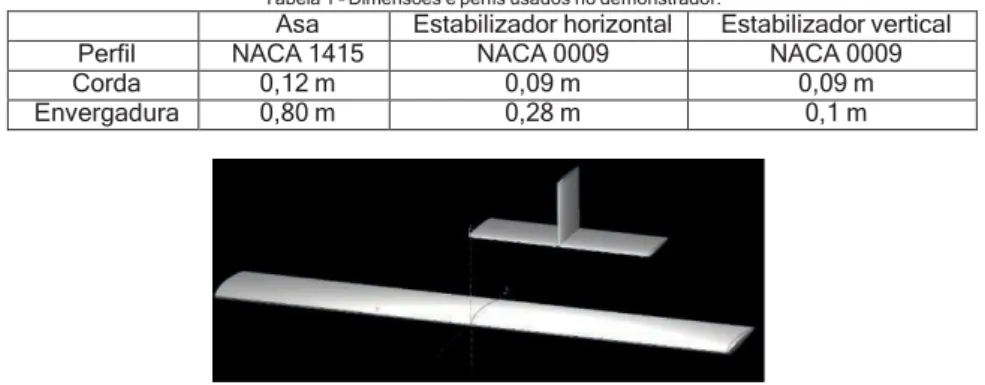
DEMONSTRADOR MODULAR DE ESTABILIDADE E CONTROLO DE VOO PARA TÚNEL AERODINÂMICO
- Conceitos de Estabilidade e Controlo
- Estado da arte
- Projeto Conceptual
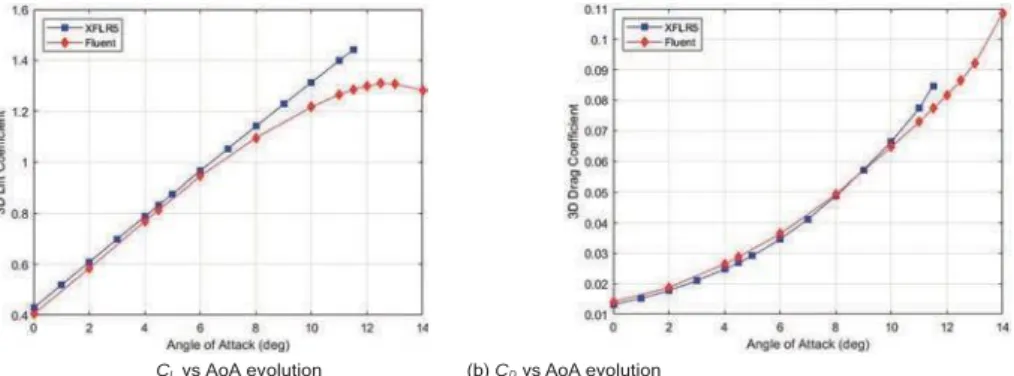
- Simulação em XFLR5
- Apresentação e Discussão de Resultados
Assim como o demonstrador projetado neste trabalho, estes possuem a capacidade de demonstrar alguns conceitos de estabilidade e controle. Para testes de um grau de liberdade, tentamos demonstrar os conceitos EDL com a configuração básica do demonstrador.