Neste trabalho foi estudado o equilíbrio e o controle de posição de um robô de duas rodas com autoequilíbrio. Portanto, o sistema normalmente consistirá de duas malhas fechadas de controle fuzzy: uma para controle de equilíbrio e outra para controle de posição/velocidade; semelhante à topologia de controle PID na Figura 2. Redes neurais artificiais são amplamente utilizadas para estratégias de controle adaptativo para robôs de duas rodas com autoequilíbrio.

O mecanismo de auto-equilíbrio
O problema do pêndulo invertido
O pêndulo invertido é um sistema dinâmico não linear típico que inclui um ponto de equilíbrio estável, que se refere ao pêndulo quando está na posição de repouso para baixo, e um ponto de equilíbrio instável quando o pêndulo está na posição vertical para cima. A estrutura do pêndulo invertido é muito simples, o que explica o desenvolvimento de muitos modelos virtuais e aplicações de dispositivos reais (BOUBAKER, 2012).
Aplicações
Os BallBot I e II da série BallBot possuem uma estrutura simples de uma haste de pêndulo delgada com um mecanismo de balanceamento de duas rodas. Uma rede perceptron multicamadas é usada e implementada em um DSP série 6000 para BallBot I (KIM et al., 2008), e uma rede de função de base radial é usada e implementada no DSP 2812 para BallBot II (NOH et al., 2008). .
Próximos desafios
Em relação à questão da ausência de um método matemático para uma abordagem de controle fuzzy que garanta estabilidade e robustez, uma solução para este problema foi proposta recentemente em (CASTILLO et al., 2008), onde controladores lógicos fuzzy tipo 1 e tipo 1 2 são baseado na teoria de Lyapunov. Uma extensão desta abordagem para sistemas mecânicos não suaves pode ser encontrada em (CÁZAREZ & CASTRO et al., 2012). As conquistas mais importantes e recentes incluem projeto de controle de sistemas de baixa potência (ORTEGA et al., 2002), pêndulos invertidos sobre rodas (YOUNIS et al., 2002) e geração de modelos de marcha para robôs humanóides e bípedes (AOYAMA et al., 2011) .
Para problemas de controle tão complexos, novas abordagens de controle híbrido estão crescendo, como as abordagens de controle neuro-fuzzy (CARDENAS & MACIEL et al., 2011). A aplicação de redes neurais tem aumentado na teoria de controle nos últimos anos, pois reduz o custo de desenvolvimento de controladores para sistemas complexos, especialmente sistemas não lineares (PEZESHKI et al., 2012). Para definir parâmetros e resolver problemas de otimização de controle restrito de sistemas robóticos, métodos bioinspirados como algoritmos genéticos (CÁZAREZ & CASTRO et al., 2010), otimização por enxame de partículas (MEHDI et al., 2011) e otimização de colônia de formigas (GARCÍA et al., 2011) al. al., 2009) são algoritmos de otimização promissores.
Recentemente foi demonstrado que se o pêndulo for colocado em determinados pontos, o movimento correspondente se tornará caótico (SAKTHIVEL et al., 2012). Novos resultados na sincronização do caos do movimento do pêndulo com outros sistemas também podem ser encontrados em (LUO et al., 2011).
PLATAFORMA DE DESENVOLVIMENTO DE HARDWARE
O controle principal é realizado por um microprocessador de 32 bits modelo AT91SAM7S256, com clock de 48 MHz, fabricado pela Atmel Corporation (http://www.atmel.com). O NXT inclui um microprocessador adicional para controlar os botões, servo motores e sensores do NXT: um AVR modelo ATmega48, CPU de 8 bits. Um terceiro processador é o NXT: um da CSR plc (http://www.csr.com), responsável por im.
O elemento sensor contido no Gyro é um giroscópio de estado sólido de eixo único Modelo XV. http://www.epsontoyocom.co.jp/english/). O sensor de velocidade rotacional é um componente essencial no desenvolvimento de um robô com autoequilíbrio de duas rodas. Embora sua saída seja analógica e, portanto, contínua, ela é amostrada a uma taxa fixa de 333 amostras/s pelo microprocessador ATmega48 do NXT.
O elemento sensor dentro do Gyro é um giroscópio de estado sólido de eixo único modelo XV-3500CB, da Epson Toyocom. http://www.epsontoyocom.co.jp/english/). O elemento sensor dentro do Gyro é um giroscópio de última geração da Epson Toyocom Corporation (http://www.epsontoyocom.co.jp/english/).
PLATAFORMA DE DESENVOLVIMENTO DE SOFTWARE: ROBOTC
A estrutura principal do chip consiste em dois ressonadores de quartzo com braços em T e dois braços sensores, montados perpendicularmente (ver Figura 12). A aplicação de uma tensão alternada com frequência de cerca de 50 kHz gera uma força oscilante nos 6 ressonadores, devido ao efeito piezoelétrico reverso (Figura 12, painel 'a'). Quando a peça é submetida a rotação no mesmo plano dos braços em T, eles começam a sentir o efeito de uma força de Coriolis (Figura 12, painel 'b').
Esta força distorce mecanicamente os braços do sensor, gerando uma tensão através do efeito piezoelétrico direto (figura 12, painel 'c'). Ambiente de Desenvolvimento Integrado (IDE) com editor e depurador, possibilitando a utilização de breakpoints, execução passo a passo e visualização de valores de variáveis (clocks) - veja figura 14. Gere códigos executáveis muito rápidos: 130 vezes mais rápidos que os gerados com NXT-G e 86% mais rápido que aqueles gerados com RoboLab, que é a segunda linguagem mais rápida para NXT.
Ela gera códigos executáveis muito menores que a maioria das outras linguagens: 20 vezes menores em média que os executáveis gerados no NXT-G. Isso permite o desenvolvimento de algoritmos muito complexos que cabem na memória flash do processador principal do NXT (256 KB).
PLATAFORMA DE SIMULAÇÃO
MODELAGEM MATEMÁTICA
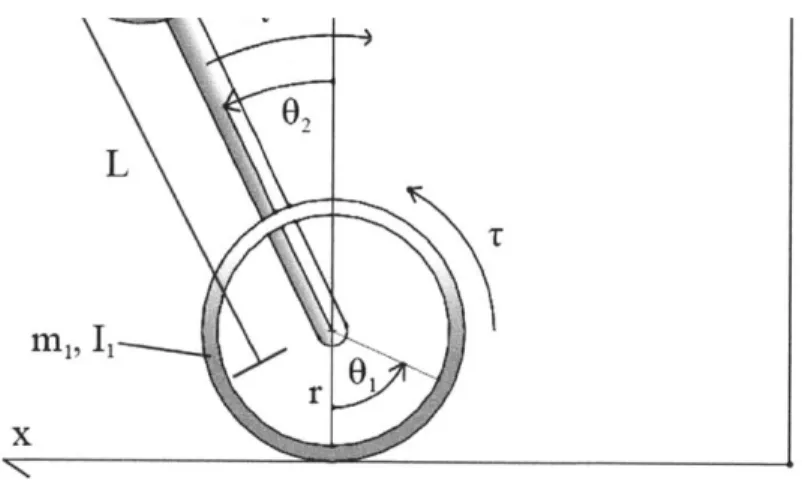
Para simplificar esta derivação, as duas rodas serão tratadas como uma única roda e será assumido que o robô se desloca apenas em linha reta. O modelo pode ser simplificado considerando o corpo como um ponto de massa girando em torno do eixo das rodas. A resposta do sistema elétrico é significativamente mais rápida que a do sistema mecânico, portanto a dinâmica do sistema elétrico pode ser desprezada.
O movimento do robô é limitado a uma linha reta, portanto o sistema pode ser analisado como um sistema bidimensional com apenas movimento planar. O ângulo de inclinação vertical do corpo elevado é suficientemente pequeno para permitir a linearização do sistema; As coordenadas (x,y) do centro de gravidade do corpo: As coordenadas (x,y) do centro de gravidade da roda: Ângulo do corpo a partir da linha vertical.
Momento de inércia da roda em relação ao centro de gravidade: Momento de inércia do corpo em relação ao centro de gravidade: Força normal. Para derivar as equações de movimento do sistema, considere o diagrama de corpo livre da roda, mostrado na Figura 19.
PARÂMETROS DA PLANTA
SISTEMA DE CONTROLE
Um sistema perfeitamente estável não tem deslocamento angular em relação ao eixo vertical, nem velocidade angular, nem deslocamento linear, nem velocidade linear. Neste projeto, as constantes foram RoboSquare (WITZAND, a estratégia obteve bons resultados para o carro-robô LEGO. De acordo com o diagrama de controle apresentado na Figura 21, o erro é a variável de controle: ângulo de inclinação) e velocidade linear. Portanto, a estratégia de controle adotada neste trabalho utilizará apenas um controlador PID de malha fechada para controlar o equilíbrio do robô autoequilibrado de duas rodas.
Para determinação dos ganhos do controle PID, os valores de tc, td e t_ foram ajustados conforme método Ziegler-Nichols (OGATA, 2003). No código de controle da balança do software RobotC, que será detalhado, são implementados os ganhos da tabela 6. O erro de posição é multiplicado por um ganho (k) e adicionado à realimentação negativa das quatro variáveis ponderadas.
No RobotC, o código de controle NXT foi implementado e pode ser visto conforme mostrado na Figura 29. O comportamento oscilante em torno do ponto de posição desejado em estado estacionário indica a característica do controlador proporcional.

CARACTERIZAÇÃO DO SENSOR GYRO
Utilizando o gabarito de teste, montado para garantir a posição estacionária do giroscópio (figura 33-A), a saída do giroscópio foi obtida em condições estacionárias. Além dos recursos apresentados, alguns girosensores como o giroscópio Hitechnic são diretamente afetados por alterações na entrada de tensão. A ativação dos motores NXT resulta numa queda de tensão e, portanto, numa alteração no offset (figura 24).
A relação entre a tensão e o deslocamento do giroscópio é linear: uma queda de tensão de 1 V fará com que o deslocamento caia 5 graus, conforme mostrado na Figura 34. Para evitar os problemas apresentados do giroscópio, deve haver algum tipo de compensação no algoritmo de controle. . .

MONTAGEM MECÂNICA DO ROBÔ
O elevado consumo de corrente dos servomotores (máximo 2 A) indicou a necessidade de aquisição de bateria recarregável, a fim de reduzir o custo da substituição frequente de pilhas alcalinas AA. A bateria recarregável possui tecnologia de polímero de íon de lítio com capacidade de 2100 mAh e fonte de 120 Vac/10 Vdc – 7 W para a bateria. É necessária uma pequena modificação na montagem estrutural do robô através da inserção de uma bateria recarregável (Figura 37). a) Composição sem bateria recarregável; (b) montagem com bateria recarregável; (c) bateria recarregável; (d) Carregador de bateria.
CÓDIGO DE CONTROLE E PROGRAMAÇÃO
O valor do erro do controlador é então calculado através dos valores da vazão e do motor multiplicados pelos seus respectivos ganhos. O valor do erro é passado através do controlador, que tentará corrigir o erro para o valor de referência desejado, que é a posição de equilíbrio vertical. Como o sensor de rpm opera a uma frequência de 333 Hz, o ciclo é atrasado para evitar que as rpm sejam lidas com muita frequência.
Durante cada tempo de amostragem, a velocidade angular do giroscópio é medida e multiplicada pelo tempo de amostragem (10 ms), fornecendo um valor aproximado para o deslocamento angular. Para compensar o problema do desvio sistemático do rendimento (viés), o cálculo do deslocamento foi introduzido no início do programa. Como o sensor giroscópio não pode ser recalibrado durante a operação, foi criado um elemento para compensar o problema.
O valor de α foi escolhido de forma que o sensor giroscópio possa contribuir com a maioria das mudanças angulares em curtos períodos de tempo, mas não tão próximo que o deslocamento angular possa ocorrer. Como o sensor giroscópio não pode ser recalibrado durante sua operação, foi desenvolvido um elemento para compensar o problema de polarização ao longo do ângulo de deslocamento.
TESTES E VALIDAÇÃO EXPERIMENTAL
Sob condições de operação não perturbadas, o deslocamento angular é de cerca de ±1o, (figura 41), o que está dentro da faixa de precisão do sensor giroscópio utilizado. No caso de uma perturbação externa durante a execução do programa, o robô retorna rapidamente à posição de estabilidade, conforme visto na Figura 45. Para o teste aplicado, o tempo para restabelecer o autoequilíbrio foi de aproximadamente quatro segundos, conforme mostrado na Figura 46.
MODELAGEM COMPUTACIONAL
O controle estacionário considera o vetor de referência nulo, ou seja, os deslocamentos angulares e lineares e as velocidades angulares e lineares são equilibrados. A condição inicial determina o ângulo inicial do robô para o caso. A variável de força externa prevê a introdução de uma força externa no sistema durante. Selecionando o tipo de controle na plataforma de simulação. a figura 50) apresenta outros subblocos semelhantes.
O bloco controlador consiste em três tipos de controladores: PID, ONFC e PIDNN; que pode ser selecionado conforme desejado. Observa-se que o valor de saída do sensor giroscópio durante a operação é periódico, ruidoso e com picos positivos e negativos, conforme mostrado na Figura 53. Para simular o comportamento ruidoso do giroscópio, um bloco com dois geradores é inserido no simulink.
Para simular o comportamento ruidoso do giroscópio, um bloco com dois geradores de pulsos, faseados em 0,25 segundos, foi inserido no simulink. A implementação da equação de integração (20) no Simulink é dada por O ganho de feedback pode ser ajustado através da janela da figura.

TESTES E VALIDAÇÃO DO MODELO COMPUTACIONAL
Por fim, as Figuras 60(c), 61(c), 62(c) e 63(c) mostram a correlação entre as variáveis simuladas e reais como forma de validação do modelo computacional.