O processo de construção de um modelo matemático a partir dos dados disponíveis de um sistema dinâmico e a capacidade de tirar conclusões sobre o sistema real é conhecido na área de controle como Identificação de Sistemas. Técnicas de identificação de sistemas são amplamente utilizadas para obtenção de modelos de aeronaves a partir de testes de voo para desenvolvimento de simuladores e sistemas de controle.
Motivação
Objetivos
Neste capítulo, fornecemos uma breve introdução às equações de movimento que levam aos modelos dinâmicos usados. Tais considerações permitem a linearização das equações de movimento que, juntamente com a simetria do plano, permitem decompô-las em um conjunto de equações para movimento longitudinal e outro conjunto de movimento lateral-direcional (SCHMIDT, 1998).
Sistema de coordenadas
Ângulos de Euler e atitude da aeronave
Esta descrição informa sobre a posição atual da aeronave em relação aos sistemas de coordenadas na superfície da terra, ou seja, uma referência para o corpo da aeronave em relação ao Nordeste-Baixo (NED), onde obtemos a posição x0 ,y0ez0. Os ângulos φ, θ e ψ são chamados de ângulos de Euler e a posição do corpo em relação à Terra é chamada de atitude da aeronave.
Mudança de coordenadas
As rotações sobre os eixos são definidas chamando φ emx de ângulo de guinada, θ emye de ângulo de inclinação e ψ emze de ângulo de guinada. As velocidades angulares ω do corpo em relação à Terra, que são as derivadas temporais das posições angulares, são determinadas pela seguinte transformação.
Forças e Momentos
Forças e Momentos Aerodinâmicas
Mesmo quando os efeitos e coeficientes são encontrados empiricamente, erros significativos podem surgir devido às condições de teste. Esses coeficientes são características dos planos encapsulados devido à sua complexidade, geralmente não lineares e tabulados. Quando há uma grande dependência de α, esses coeficientes são chamados longitudinais, ou seja, sustentação, arrasto e passo ou momento de passo.
Ao analisar os coeficientes aerodinâmicos do avião, eles podem ser divididos em: Derivadas amortecidas, quando estas tendem a criar forças e momentos opostos ao movimento p,qer; e Derivadas aceleradas, quando o aumento devido a esta derivada é diretamente proporcional às taxas dos ângulos ˙α (em alguns casos também para ˙β).
Forças e Momentos Propulsivos
Em muitos casos a posição vertical da hélice proporciona um braço de momento longitudinal desprezível em relação ao CG da aeronave, sendo esta contribuição para o momento de arfagem muito pequena assim como os efeitos giroscópicos de qualquer elemento rotativo, além do fato de que , em geral os efeitos das forças propulsivas são incluídos nas forças e coeficientes aerodinâmicos.
Forças Gravitacionais
Modelo
Desacoplando as equações
Como visto anteriormente, as equações que regem o movimento de uma aeronave podem ser simplificadas, e caso este trabalho seja limitado a pequenas perturbações e movimentos de nível, pode-se realizar uma linearização nas estabilidades derivadas dimensionais. Os produtos de inércia também podem ser inseridos nas equações, mas geralmente sua contribuição é pequena, e se um momento de inércia tiver uma contribuição significativa no projeto e não estiver nas equações, pode ser erroneamente interpretado como uma derivada aerodinâmica, apenas observadas em condições especiais. Uma inspeção dos coeficientes e elicia o raciocínio sobre a simetria sobre o plano exze em relação aos movimentos planos, segue-se que os vetores de estados e entradas podem ser estabelecidos de tal forma que;
Movimento Longitudinal
- Modelo Período Curto
- Modelo Fugóide
Para modelar o modo de período curto linearmente, a variação do ângulo de inclinação e a velocidade relativa podem ser aproximadas como equivalentes para calcular o ângulo de ataque e a velocidade de inclinação, ou seja. Na modelagem para o modo fugóide, consideramos que o ângulo de ataque permanece constante, tornando a velocidade de referência um valor muito próximo de 0, portanto:. 2.16c). Dessa forma, também é valioso indicar os valores de referência em torno do equilíbrio representado pelo índice eq.
De certa forma, o valor do ângulo de ataque não é exatamente constante, mas sim pequeno em relação à componente u0/vT, que é exatamente o comportamento oposto ao apresentado no modo de curto período.
Movimento Latero-direcional
- Modelo latero-direcional
Neste capítulo, descrevemos brevemente os métodos de erro de previsão (MEP) usados na análise de dados. Estes dois últimos casos são classificados como métodos Erro de Equação e Erro de Saída, respectivamente. Por outro lado, podemos dizer que o método de erro de filtro é uma extensão natural dos métodos de comparação e erro de saída.
Antes de mergulharmos nos métodos de erro de previsão, vamos fazer uma breve introdução à estimativa de máxima verossimilhança.
Princípio da Máxima Verossimilhança
Em geral, os métodos de erro de previsão possuem características estatísticas herdadas dos métodos de verossimilhança, como variância (λ(θ)) e função de distribuição de probabilidade (PDF → f(e,θ)), que são considerados robustos o suficiente para lidar com ruído. Se considerarmos que o ruído está contido tanto na dinâmica do processo quanto na saída do sistema, esses modelos são chamados de métodos de erro de filtro. Com as breves definições acima, podemos dizer que os métodos de erro de comparação e erro de saída são casos especiais de um caso mais geral, o método de erro de filtro.
Este método também é conhecido como método de Gauss-Newton (JATEGAONKAR, 2015, Seç e será utilizado na etapa de minimização da função de custo.
Métodos de erro de saída
Para a minimização da função de custo, uma expansão em série de Taylor pode ser usada para a solução exata em relação a um parâmetro θi, ou seja Para usar tal método, precisamos calcular o gradiente da função de custo, que é encontrado pela equação de diferenciação (3.9) em relação aos parâmetros, ou seja, 3.11) Para finalmente obter o valor mínimo da função custo precisamos Tais resultados podem levar a valores numéricos incorretos, porém já fornecem uma minimização inicial da função de custo e da matriz R (JATEGAONKAR, 2015, Apêndice E).
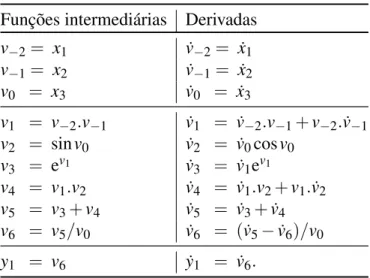
Como o conjunto de observações e o total de pontos coletadosN são constantes e definidos, o primeiro e o último termos da função de custo tornam-se constantes e podem ser ignorados. Podemos usar métodos de diferenças finitas, que dependem apenas dos valores da função e avaliam totalmente seu gradiente ao final da etapa de avaliação da função. Diferenciação automática ou diferenciação algorítmica é um termo geral que inclui métodos de diferenciação computacional que usam uma representação de uma função para fornecer o valor de suas derivadas.
Observe que a última etapa é atribuir as últimas (ou últimas) funções intermediárias como a saída da função. Para avaliar a função de custo da equação 3.10 quando a matriz de covariância é fornecida inicialmente, é necessário calcular o erro.

Método do Erro de Equação
Método do Erro de Filtro
O método do erro do filtro (FEM), também conhecido como erro de predição, é baseado no princípio da probabilidade máxima e assume que o sistema sob avaliação é estocástico, com ruído tanto na saída quanto no processo. Em suma, o método do erro do filtro pode ser interpretado de forma que o erro seja proporcional ao número de correções necessárias (DUTRA, 2010, seção 4.4). O processo de minimização é semelhante ao realizado no OEM, utilizando o método de Gauss-Newton.
Na otimização de Gauss-Newton, a maioria dos métodos de otimização usados para identificação requer atualização iterativa de parâmetros.
Diferenças finitas
Passo a Frente
Assumindo que a função f é duplamente diferenciável continuamente e escolhendo um valor de εlique que represente uma pequena perturbação compatível com uma mudança perceptível no valor da função no ponto x0, usar essa aproximação permite reduzir o erro de tal forma que pode ser tão pequeno quanto desejado. Quando lidamos com problemas matemáticos por meios computacionais, temos que considerar algumas limitações das máquinas para o valor de ε, onde a ordem de grandeza dos resultados é limitada pelos valores que a máquina consegue calcular. Este valor de ε é uma generalização e pode variar um pouco quando a rotina de otimização for executada para obter o valor ideal para este caso.
Isso adiciona um custo computacional, fazendo com que muitos autores utilizem o valor de ε próximo ao citado sem nenhuma otimização prévia (NOCEDAL; WRIGHT, 2006, Sec. 8.1).
Diferença Central
A unidade de arredondamento limita significativamente os valores nos quais f pode ser calculado, e um valor convencionalmente ideal para a maioria dos casos é ε =√u, que é aprox. Este ε leva a valores otimizados consideravelmente pequenos para que uma curva suave possa ser obtida, mas não permite que os valores de perturbação fiquem muito próximos do ponto onde ocorrem erros de aproximação, que ainda existem, mas são tão pequenos quanto √ u .
Passo Complexo
As diferenças finais representam a simplicidade que resulta da fácil implementação em código, mas o erro associado ao tamanho do passo acaba por ser o principal fator limitante em algumas aplicações, ainda que seja menor num passo complexo.
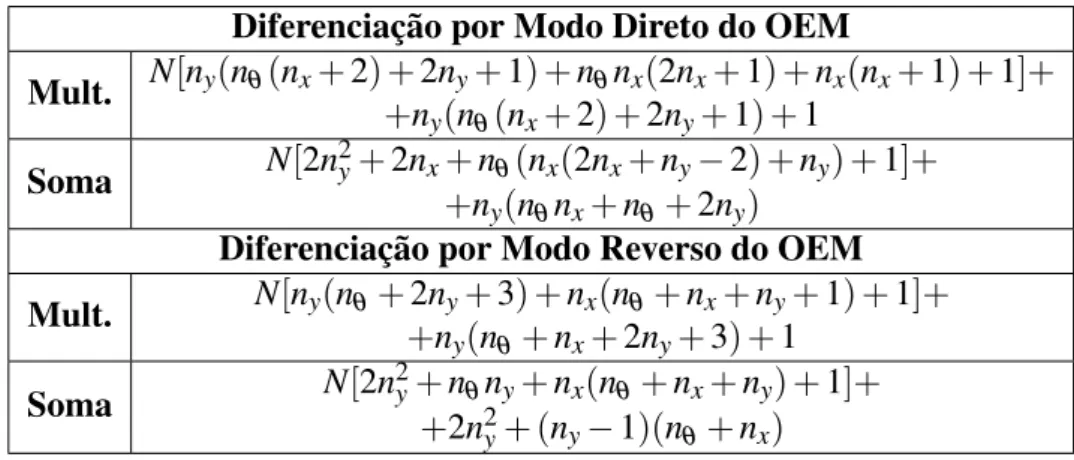
Diferenciação Algorítmica e Modos de Cálculo de Derivadas
Modo Direto
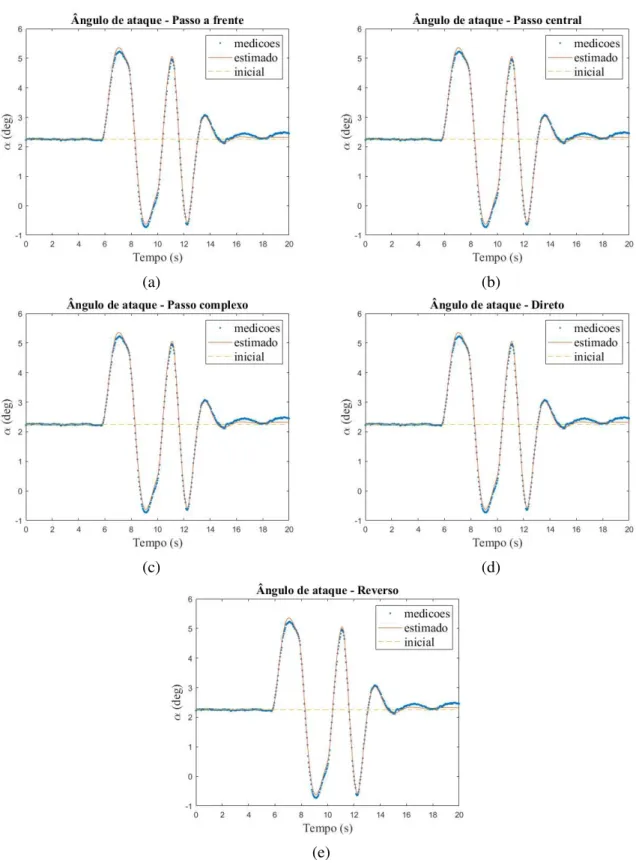
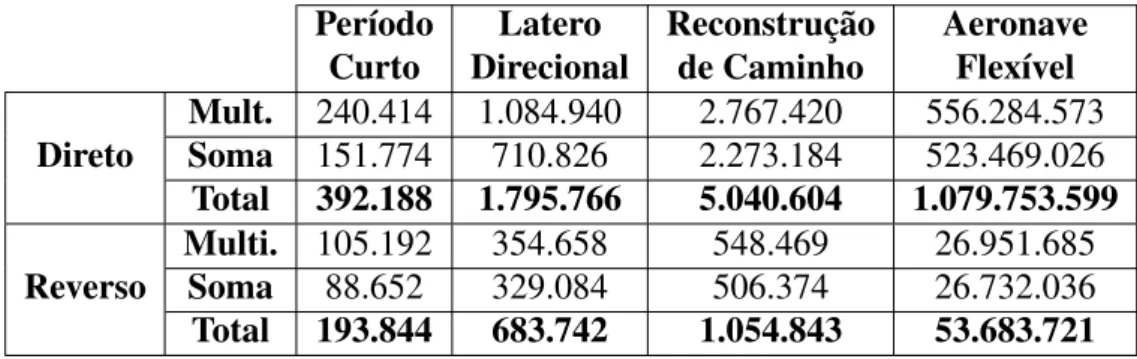
Obtivemos os resultados mostrados na Tabela 14 para os métodos de diferenças finitas e na Tabela 15 para os métodos direto e inverso. No entanto, ao comparar os métodos direto e inverso, há uma diferença importante entre os tempos. Semelhante ao modelo longitudinal, o modelo de direção lateral apresentou o menor tempo de avanço entre os métodos de diferenças finitas, enquanto o método de diferenças centrais apresentou o pior resultado.
Sugerimos também a criação de uma biblioteca específica para os métodos direto e inverso para simplificar a implementação.
Modo Reverso
Modo Direto e Reverso no Método de Erro de Saída
Comparação entre os Métodos
Podemos observar claramente a limitação da máquina quando comparamos os métodos derivados por diferenças finitas com os métodos analíticos. Este trabalho utilizou o OEM para estimar dados de um modelo direcional de curto período e posterior, comparou os métodos derivados e avaliou o custo computacional de cada método. O método direto e inverso no modelo longitudinal levou menos tempo que os métodos de diferenças finitas, que aproveitam a eficiência de conhecidas bibliotecas de diferenciação simbólica, mas apresentam maior dificuldade de implementação.
Dessa forma, os métodos são todos satisfatórios para os casos analisados e a implementação em outros modelos depende do nível de exigência, como custos operacionais computacionais, capacidades de implementação e requisitos de precisão dos dados.

Sugestões para trabalhos futuros
Podemos concluir que o método step-ahead é o mais fácil de implementar e os resultados são satisfatórios desde o ajuste da curva até o tempo de execução do algoritmo, que é o menor tempo entre diferenças finitas no modelo longitudinal. O método das diferenças centrais leva muito tempo para ser executado, com um valor de tempo de 51,5. maior que o passo para frente e 23,8% maior que o passo complexo no modelo longitudinal. Métodos de Identificação de Sistema para Desenvolvimento de Controle de Aeronaves e Avanços de Validação em Controle de Aeronaves, Taylor & Francis New York, p.
Uma comparação entre o resultado do modelo estimado e as medições disponíveis para uma manobra longitudinal de curta duração usando dados disponíveis em (JATEGAONKAR, 2015, Capítulo 4, Seção 4.20.1)).