O Capítulo 1 apresenta uma visão bibliográfica dos métodos de extração de características lineares e rodoviárias. Normalmente, os métodos de extração de estradas seguem duas abordagens: automática e semiautomática.
M´ etodos autom´ aticos
Long e Zhao (2005) usam segmentação por deslocamento médio para detectar estradas, aplicando posteriormente um limite para separar as estradas do fundo. 1999) aplicam morfologia matemática para limpar o ruído durante a detecção de caminho a partir de uma ortofoto.
M´ etodos semiautom´ aticos
Primeiro, o usuário amostra uma pequena seção inicial da estrada e um perfil perpendicular a esta seção, para coletar uma amostra de cor que se refere aos níveis de cinza da estrada. Após este procedimento, dois vértices equidistantes são inseridos entre cada par de vértices do caminho originalmente traçado pelo operador.

Atualiza¸c˜ ao e controle da qualidade de bases cartogr´ aficas
Para verificar a qualidade dos dados, é gerada uma região de interesse (buffer) ao redor de cada estrada com largura igual à largura da estrada mais o valor de 3 metros, que é a precisão desejada para a base. Cada estrada possui uma área de influência demarcada com base no erro máximo aceitável.
Termos relacionados a resolu¸c˜ ao de imagens no sensoriamento
Programa¸c˜ ao Dinˆ amica
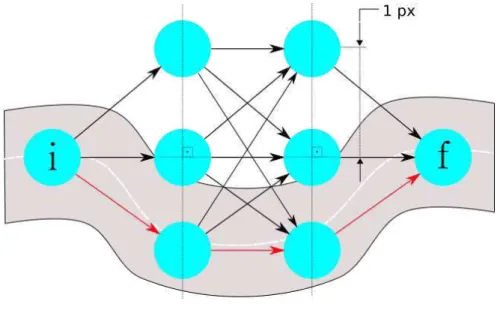
Exemplo de otimiza¸c˜ao com programa¸c˜ao dinˆamica
Para que seja possível obter o caminho de custo mínimo ao final da programação dinâmica, outra ação tomada será registrar a decisão de custo mínimo para cada vértice. Esta decisão é o vértice da próxima etapa que leva a um caminho de custo mínimo até o vértice final t.
A ferramenta de mapeamento QgsMapTool
A seguir são apresentados os métodos virtuais da classe QgsMapTool considerados mais relevantes para a implementação do ToolBox Adaplin. Conceitualmente, a implementação do método afirma o estado ativo de utilização da ferramenta, mantém o botão da interface gráfica pressionado e define o novo cursor para o mouse.
M´ etodo original de Gruen e Li
Fun¸c˜ao objetivo
A função objetivo de Gruen e Li busca combinar a modelagem matemática de seis propriedades de caminho, sendo esta modelagem apresentada para o caso discreto em que uma polilinha de n vértices é descrita por P = {p1, p2, p3, .., pn} , onde pi = (xi, yi) são as coordenadas do segundo ponto da polilinha. Existe também uma restrição Cg que impõe uma restrição à curvatura do caminho, e a função objetivo é avaliada somente quando a condição definida por Cg é verdadeira.
M´ etodo empregado na ferramenta Adaplin
Modelo conceitual da estrada
Assim, deve-se destacar que tudo depende da relação entre a largura da estrada e a resolução espacial da imagem. Portanto, no caso de estradas com largura menor que a resolução espacial da imagem, a influência do entorno da estrada não pode mascarar a resposta espectral da estrada de tal forma que ela se torne invisível. A abordagem de programação dinâmica utilizada neste trabalho assume que as propriedades da estrada são modeladas matematicamente.
Com um alcance maior, a soma dessas diferenças ao longo do caminho deve ser mínima. Como a estrada é representada por uma polilinha formada por segmentos, os ângulos de deflexão entre os segmentos devem ser mínimos para que a curvatura da estrada seja minimizada. A sua importância justifica-se pelo facto da sua forma ser uma característica proeminente da estrada.
Algoritmo de inser¸c˜ao e otimiza¸c˜ao de pontos
Com a combinação das 3 propriedades na função objetivo E, buscamos maximizar (P rop1), minimizar (P rop2) (daí o sinal negativo), enquanto suavizar (P rop3). Quanto menor Θ, maior será a suavidade e consequentemente maior será o valor da função E; quanto maior Θ, menor será a suavidade e consequentemente E será menor. É importante notar que Gruen e Li colocam β e γ como constantes positivas na função objetivo para atribuir pesos às propriedades.
Além disso, cada aresta do gráfico tem como peso o valor correspondente da função objetivo, considerando a imagem de entrada. Uma vez criado o gráfico, o procedimento de busca pelo caminho ótimo pode ser realizado considerando a função objetivo mostrada na equação 21. Para calcular os componentes RGB de uma imagem em um determinado ponto (xA, yA), é utilizada uma função QGIS que trunca a imagem raster naquele ponto, retornando o valor do pixel naquela posição.
A classe AdaplinTool
A próxima seção apresenta a implementação da classe que modela o funcionamento prático da ferramenta. Dois atributos essenciais são as listas de pontos e pontos interpolados, que armazenam os pontos marcados pelo usuário e os pontos resultantes da interpolação, respectivamente. O método canvasP ressEvent foi projetado para adicionar um ponto toda vez que o botão esquerdo é pressionado.
O método CanvasM oveEvent é implementado de forma que sempre que o usuário move o mouse pela tela da aplicação, é realizada a otimização dinâmica do caminho de programação e a visualização da respectiva linha é desenhada na tela. Esta funcionalidade é muito útil para o operador, pois ao adicionar um novo ponto pressionando o botão esquerdo, ele já sabe antecipadamente como ficará a polilinha formada. A tecla Esc é utilizada para completar a função desde o teclado, sendo uma opção do botão direito.
Disponibilidade de imagens e software
Período de revisão Diariamente para observação fora do nadir (fora do nadir) 5,5 dias para observação do nadir.
Base de Dados
Informa¸c˜oes sobre as imagens Rapideye
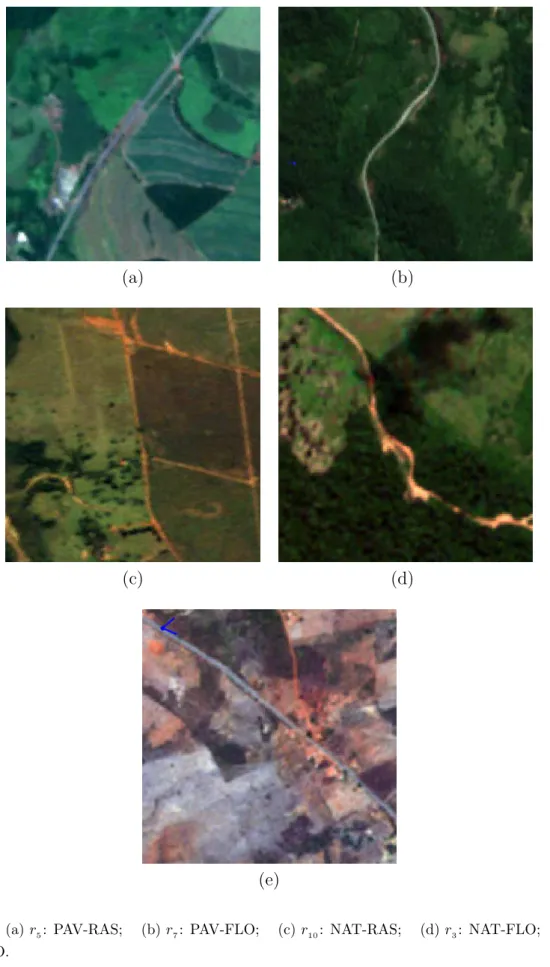
Recortes Rapideye utilizados
Dados de Referˆencia
Clipes de imagem da classe Rapideye no banco de dados Clip PAV-RAS PAV-FLO NAT-RAS NAT-FLO PAV-SOLO.

Parˆ ametros de an´ alise da qualidade da extra¸c˜ ao das polilinhas
A Equação 22 implica que para cada ponto a ∈A existe um certo ponto b ∈B cuja distância euclidiana a a é mínima. Portanto, existe um conjunto de distâncias mínimas de AtoB, uma distância para cada ponto a∈ A. Mozas (2008) propõe uma extensão da métrica de Hausdorff tomando a média e o desvio padrão em distâncias mais curtas.
Nesta dissertação, as medidas representadas pelas Equações 22 a 24 são utilizadas para avaliar a qualidade cartográfica do eixo extraído. Inicialmente, o script substitui os pontos inicial e final do eixo extraído pelos pontos inicial e final do eixo de referência. Então, considerando a densificação como um requisito para tornar a forma mais aproximada do conjunto correspondente de pontos, o script aumenta a densidade de pontos em ambas as meias-linhas em comparação.
Experimentos realizados e resultados obtidos
Experimentos com os recortes da classe PAV-RAS
- M´etodo manual
- Extra¸c˜ao Toolbox Adaplin
- Compara¸c˜ao dos resultados
Os resultados da extração manual para os recortes da classe PAV-RAS são apresentados na Tabela 5. Os parâmetros relacionados aos resultados da extração de estradas usando a ferramenta Adaptlin Toolbox para os recortes da classe PAV-RAS são apresentados na Tabela 6. Os resultados para o PAV-RAS serão analisados recortes de classes com o objetivo de descobrir quantas vezes ou em quantos trechos a extração com o Toolbox Adaptlin é melhor que a manual ou vice-versa, com base nos parâmetros avaliados.
O dH médio para extração manual foi de 8,1 metros para extração manual e 14,8 metros para extração utilizando o Adaptin Toolbox, indicando um m´edio. A extração utilizando o Adaplin Toolbox apresentou melhores resultados com menor tempo em 18 dos 20 ou 90%. O tempo total gasto em toda a vetorização foi de 13 minutos e 11 segundos para extração manual e 10 minutos e 28 segundos para extração do Toolbox.

Experimentos com a classe PAV-FLO
- Extra¸c˜ao manual
- Extra¸c˜ao Toolbox Adaplin
- Compara¸c˜ao dos resultados
- Extra¸c˜ao Toolbox Adaplin
- Compara¸c˜ao dos resultados
A extração manual apresentou melhores resultados para o deslocamento máximo dH e o deslocamento médio dH em todos os trechos. A média dos desvios máximos representados pelo dH foi de 6,5 m para extração manual e 15,4 m para extração utilizando o Adaplin Toolbox, indicando um aumento menor na versão de 8,9 m. A extração usando o Adaplin Toolbox, por outro lado, resultou em menor duração e esforço em todas as seções.
Os parâmetros relacionados aos resultados da extração manual para fragmentos pertencentes à classe NAT-RAS são mostrados na Tabela 11. Os parâmetros relacionados aos resultados da extração utilizando a caixa de ferramentas Adaplin para fragmentos pertencentes à classe NAT-RAS são mostrados na Tabela 12. Extração o uso da caixa de ferramentas Adaplin mostrou menor duração em 19 dos 20 cortes, ao mesmo tempo em que apresentou menor esforço em todos os cortes.

Experimentos com a classe NAT-FLO
- Extra¸c˜ao manual
- Extra¸c˜ao Toolbox Adaplin
- Compara¸c˜ao dos resultados
A extração manual apresentou melhores resultados em todos os cortes para dH e σH, enquanto apresentou menores desvios máximosdH em 19 dos 20 ou 95% dos cortes. A média dos desvios máximos apresentados pelo dH foi de 6,5 m para extração manual e 13,8 m para extração utilizando o Adaplin Toolbox, indicando um aumento menor de 7,3 m no deslocamento máximo entre a cinza extraída e o eixo de referência. Para o parâmetro dH, que calcula o deslocamento médio entre o eixo extraído e o eixo de referência, o valor limite médio foi igual a 1,5 m para extração manual e 2,5 m para extração manual.
A média do σH foi de 1,2 m para extração manual e 2,2 m para extração em caixa de ferramentas, o que também representa uma diferença média de 1 m na distribuição dos erros nos recortes. A extração com Toolbox Adaplin apresentou melhores resultados em termos de duração e esforço em todos os cortes. O tempo total gasto na vetorização manual foi de 16 minutos e 54 segundos para extração manual, enquanto o cálculo para extração com Toolbox Adaplin foi de 14 minutos e 16 segundos, indicando um racionamento de 2 minutos e 38 segundos.

Experimentos com a classe PAV-SOLO
- Extra¸c˜ao manual
- Extra¸c˜ao Toolbox Adaplin
- Compara¸c˜ao dos resultados
Para o desvio médio máximo dH entre o eixo extraído e o eixo de referência, a extração manual atingiu 8,1 metros e a extração utilizando a caixa de ferramentas Adaplin obteve 19,3 metros, indicando um aumento médio de 11,2 metros. A DH média apresentou resultado de 2,6 m para extração manual e 6,8 m para extração com caixa de ferramentas, indicando um aumento médio de 4,2 metros. A distribuição média dos desvios σH entre o eixo extraído e o eixo de referência foi de 1,9 m para a extração manual e 4,7 m para a extração em caixa de ferramentas, representando um aumento médio de 2,8 m.
O único parâmetro de análise que a extração pelo Adaplin Toolbox apresentou melhores resultados foi no esforço, onde houve menos pontos marcados em 13 dos 20 ou 65% dos cortes. O tempo total gasto na vetorização manual foi de 10 minutos e 3 segundos para extração manual e 11 minutos e 5 segundos para extração utilizando a caixa de ferramentas Adaplin, representando um aumento de 1 minuto e 2 segundos utilizando a caixa de ferramentas. O esforço total foi de 361 para a extração manual e 243 para a extração da caixa de ferramentas, mostrando uma economia de 118.

Experimentos com a ferramenta Erdas Easytrace
- Compara¸c˜ao dos resultados
Discuss˜ ao dos resultados
O desvio médio por corte foi de 1,74 metros para extração manual e 3,1 metros para extração com ferramenta. No entanto, a média marginal dos maiores desvios foi de 15,4 metros para amostragem de ferramenta e 6,5 metros para amostragem manual. O tempo foi economizado para a classe NAT-RAS em comparação com a extração manual usando o Adaplin Toolbox.
A duração média por O corte medido para a classe NAT-FLO foi de 50,7 segundos para extração manual e 42,8 segundos para extração usando Adaplin Toolbox, representando uma economia de 15,6% de tempo. O esforço médio por a média foi de 64,9 para extração manual e 25,2 para extração usando o Adaplin Toolbox, mostrando uma redução de 61,2% na pontuação do operador. A duração média por a extração foi de 30,2 segundos para extração manual e 33,3 segundos para extração usando Adaplin Toolbox, representando um aumento de 10,3% no tempo de extração.
Contudo, é necessária cautela para a classe PAV-SOLO e é preferível utilizar a extração manual nesta situação. A ferramenta também pode ser testada para extração de trechos de drenagem utilizando a faixa infravermelha.