Considera-se a utilização do método de Evolução Diferencial (DE) no problema inverso de identificação de danos. Para resolver o problema inverso de identificação de danos, foram considerados Algoritmo Genético (AG) e PSO.
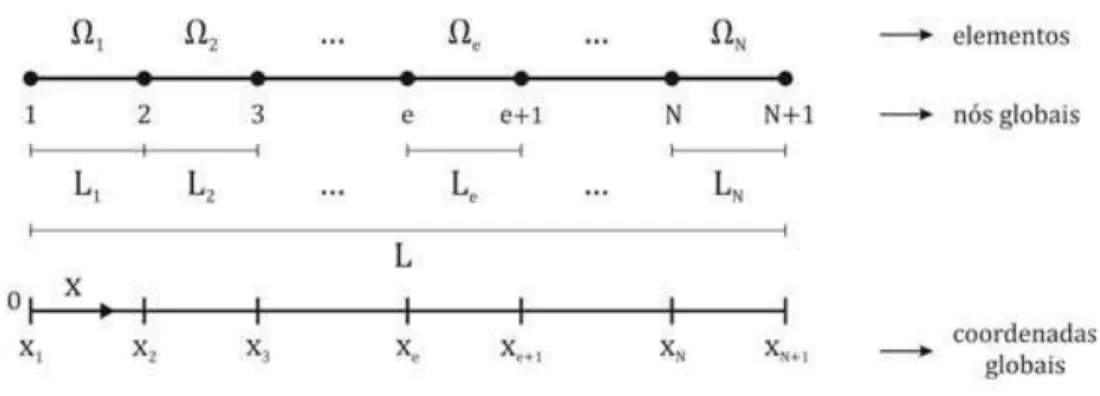
Modelo de elementos finitos
Eles permitem um grande número de simulações de pequenas alterações no sistema (condições de contorno, condições ambientais, parâmetros físicos, etc.), facilitando o projeto de testes e o posicionamento ideal de transdutores para realizar as medições necessárias à identificação de danos.
Campo de danos
Modelo de dano constante por partes
Considerando que, na presença de dano, este reduz o módulo de elasticidade dos elementos da área danificada, situação aceita pela comunidade científica e analisando a equação 2. a constante de proporcionalidade da matriz de rigidez nominal, ou seja, da matriz de rigidez sem danos, quantificando a rigidez de um elemento danificado.
Modelo de dano cont´ınuo
Ressalta-se que a discretização do campo de coesão β independe da discretização do campo de deslocamentos, podendo ser adotadas diferentes malhas. A Figura 8 ilustra a relação entre a relação de espessura da viga com e sem danos e o parâmetro de coesão.

Montagem das matrizes globais
Os princípios básicos necessários para modelar o comportamento de dano de um corpo contínuo são apresentados detalhadamente em Costa Matos e Sampaio (1996) e Costa Matos et al. Para determinar a energia potencial do feixe, segue-se o mesmo raciocínio para obter a energia cinética, que é descrita por.
Imposic¸ ˜ao das condic¸ ˜oes de contorno
Par ˆametros modais do sistema
No Modelo de Superfície de Resposta (MSR), são definidas relações explícitas entre parâmetros estruturais - no caso especial de identificação de danos, os parâmetros de coesão nodal - e respostas de interesse. De acordo com Myers et al. 1989), no procedimento de otimização busca-se identificar uma função matemática que modele a variação das respostas em função da variação dos fatores investigados, sendo os polinômios os algoritmos mais utilizados. Montgomery (1991), afirma que o teste estatístico do modelo linear não satisfaz as condições de operação do sistema, devido à existência de curvatura na superfície de resposta, portanto uma superfície O design não plano adaptará melhor a variação da resposta. dependendo dos fatores.
Portanto, para determinar os coeficientes da função resposta, é necessário ter mais dados, que sejam maiores ou pelo menos iguais ao número de coeficientes. Deve-se notar que existe uma superfície de resposta para qualquer resposta escalar considerada.
Projeto de experimentos
Projeto fatorial 2 k
Portanto, neste projeto há um total de 2k observações de resposta do sistema, uma para cada combinação possível de níveis de fatores. A resposta do sistema deve ser observada, numericamente ou experimentalmente, para cada combinação de fatores em um planejamento fatorial completo, e cada observação representa um teste realizado no sistema. Em um planejamento fatorial completo, um número menor de testes está disponível para os quais os kfatores podem ser examinados. Isto ocorre porque existem simplesmente dois níveis de cada fator, o que pressupõe que a resposta é aproximadamente linear ao longo do intervalo. - todos os níveis de fatores selecionados.
Projeto fatorial fracionado
Com este projeto é possível analisar os efeitos sobre uma resposta de interesse de 2k fatores em combinações 2k−f, analisando assim apenas uma fração de todas as combinações possíveis. Por exemplo, quando se deseja utilizar meia fração do projeto 2k, é realizado um experimento com combinações 2k−1, chamando assim o projeto fatorial 2k−1. Este projeto é indicado apenas quando os efeitos principais dos fatores e interações de baixa ordem são considerados importantes.
Projeto composto central
Na Tabela 1 é mostrada a correlação dos k fatores com o número de pontos fatoriais2k, o número de pontos axiais2k, o número total de combinações que possuem apenas uma repetição no ponto central. Número Número de pontos Número de pontos Número de fatores,k fatoriais,2k axiais,2k combinações. Pode-se observar na Tabela 1 que o aumento no número de fatores provoca um aumento significativo no número de combinações, esse aumento se deve ao fato do número de pontos dos fatores aumentar rapidamente.
Conforme mostra a Tabela 1, o aumento no número de fatores implica um aumento significativo no número de combinações, o que aumenta o custo computacional. Para reduzir o número de combinações, aplica-se a técnica de Design Fatorial Fracionário ou Design Ótimo.

Projeto ´otimo
No presente trabalho foi utilizado o Projeto Ótimo, pois seleciona o melhor subconjunto de todas as combinações possíveis, Aguiar et al.
Matriz de projeto (X)
- Projeto D- ´otimo
- Crit ´erio A
- Func¸ ˜ao de vari ˆancia
- G-efici ˆencia
O projeto MatrixX contém o melhor subconjunto de combinações da matriz de pontos candidatos. Os elementos da diagonal principal da matriz de dispersão representam a variância dos coeficientes do modelo (bij, onde i = j) e os demais elementos (bij, onde i6=j) representam a covariância. Minimizar o determinante da matriz de dispersão (XTX)−1 equivale a maximizar o determinante da matriz de informação (XTX).
Quanto maior o determinante da matriz de informação, mais próxima a matriz de dispersão está da ortogonalidade. Como critérios adicionais para determinar a matriz de projeto ótima, são utilizados os seguintes critérios: Critério A, Função de Variância e Eficiência G.

Algoritmo de Fedorov
- Adic¸ ˜ao e exclus ˜ao de combinac¸ ˜oes
O critério G-eficiência considera não apenas o número de coeficientes do modelo, mas também o número de combinações e a função de variância, e pode ser descrito como 52), onde d(x) é o valor máximo da função de variância do projeto en é o número de combinações da matriz do projeto X. No presente trabalho, o algoritmo de Fedor é utilizado para selecionar o projeto ótimo, devido ao fato de ser baseado no projeto MatrixX. A matriz de projeto ideal, ou seja, o número ideal de combinações no domínio experimental, é escolhida observando o efeito da substituição de uma combinação por outra desse conjunto.
Sua matriz de informação correspondente é dada por (XTncXnc)(0) e a função de variância (d) de um ponto candidato xj, no domínio de combinações, é dada por . No algoritmo de Fedorov, o ponto xi da matriz de projeto X é trocado simultaneamente pelo ponto xj da matriz de pontos candidatos, onde a nova matriz de informação é descrita por.
An ´alise do modelo
- An ´alise de vari ˆancia
- Coeficiente de determinac¸ ˜ao
- Coeficiente de determinac¸ ˜ao ajustado
- Erro relativo
Cada soma quadrática está associada a um determinado número de graus de liberdade, indicando quantos valores independentes envolvendo as combinações nc são necessários para determiná-la. Em um modelo com parâmetros cb, o número de graus de liberdade é obtido a partir da soma quadrada residual da diferença entre o número de observações (combinações) e o número de parâmetros estimados (coeficientes do modelo), assim, vr = (nc −cb ). O número de graus de liberdade da soma dos quadrados devido à regressão deve ser igual ao número de parâmetros (coeficientes do modelo) menos um, vR= (cb −1).
Para formular o problema de identificação de danos no domínio da frequência, o vetor de resposta generalizado é definido como,. Ao definir o problema de identificação de danos, existe uma função definida com base na diferença entre a resposta experimental e a resposta prevista pelo MSR.
M ´etodo de otimizac¸ ˜ao utilizado
Algoritmo Evoluc¸ ˜ao Diferencial (ED)
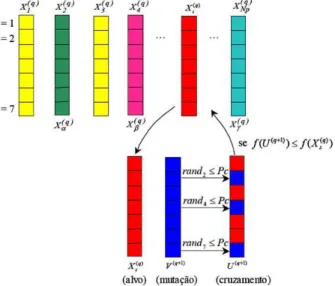
O processo de troca dos componentes do indivíduo doador pelos componentes do vetor alvo é frequentemente referido como cruzamento no grupo de algoritmos evolutivos. Se o vetor de tentativa produzir um valor na função objetivo que seja menor que o valor do vetor alvo, então o vetor de tentativa se tornará o vetor alvo da próxima geração. Mutação: Para obter o vetor doador V(q+1), considere os vetores Xα(q),
Pc é definido como a probabilidade de interseção (fornecida pelo usuário e incluída no intervalo entre [0,1]), que simboliza a chance de o vetor esforço herdar os valores das variáveis do vetor doador. Se o custo do vetor de esforço for inferior ao custo do vetor alvo, o vetor alvo se tornará o vetor de esforço da próxima geração.
Propriedades da viga simulada
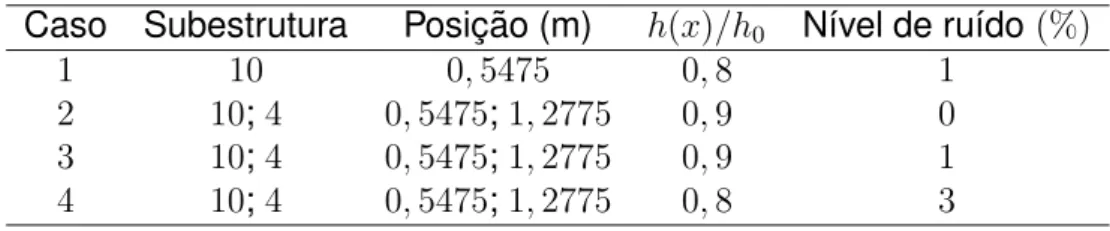
Por fim, o problema de identificação de danos é considerado para diferentes cenários de danos e diante de dados corrompidos com ruído adicional. O MEF é utilizado com os valores nodais do parâmetro de coesão descritos de acordo com os cenários de dano considerados, para gerar as frequências naturais da estrutura danificada, representando assim os dados experimentais sintéticos utilizados no processo de identificação de danos. A Tabela 5 apresenta as primeiras dez frequências naturais não danificadas e os correspondentes erros relativos, em relação às frequências naturais teóricas, para o feixe não danificado.
Na Tabela 5 observa-se que os erros relativos das dez primeiras frequências naturais possuem tamanho pequeno, o que indica a precisão do modelo adotado. No presente trabalho, com o objetivo de simular os dados experimentais de forma mais realista, foi considerada a presença de ruído aditivo, com média zero, nas frequências naturais experimentais sintéticas da seguinte forma.

An ´alise do comportamento da viga em func¸ ˜ao da localizac¸ ˜ao do
Gerac¸ ˜ao da superf´ıcie de resposta
- Escolha do tipo de superf´ıcie de resposta
- Escolha do tipo de superf´ıcie de resposta pela identificac¸ ˜ao de danos
- Projeto ´otimo de experimentos
- An ´alise da superf´ıcie de resposta
Nesta subseção é avaliada a diferença efetiva entre diferentes tipos de superfícies de resposta em um problema de identificação de danos. A Figura 27(a) apresenta a média das dez simulações utilizando o método ED, utilizando a superfície de resposta LI. A Figura 28(a) apresenta a média das dez simulações utilizando o método ED, utilizando a superfície de resposta QP.
A Figura 29(a) apresenta a média das dez simulações utilizando o método ED utilizando a superfície de resposta QI. Pelas Tabelas 16 podemos considerar que os resultados da análise de variância demonstram que os modelos de superfície de resposta estão ajustados.

Identificac¸ ˜ao de danos - Viga simplesmente apoiada
Para validar o resultado são calculados os erros relativos das quatro primeiras frequências naturais, antes e depois da identificação dos danos, conforme mostra a Figura 43. A Figura 45 apresenta os erros relativos das quatro primeiras frequências naturais, antes e depois da identificação dos danos. No presente trabalho foi considerado um Modelo de Superfície de Resposta (MSR) adaptado às frequências naturais para a identificação de danos estruturais.
O método de evolução diferencial estocástica (DE) foi utilizado para o problema de identificação de danos neste trabalho. Modelagem do problema inverso de detecção de danos utilizando parâmetros de identificação e técnicas de otimização.