Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica
Redes Neurais Artificiais no Ambiente de Redes
Industriais
Foundation Fieldbus
Usando Blocos
Funcionais Padr˜
oes
Autor: Diego Rodrigo Cabral Silva
Orientador: Prof D.Sc. Adri˜ao Duarte D´oria Neto
Co-orientador: Prof D.Sc. Luiz Affonso Henderson Guedes de Oliveira
Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica
Diego Rodrigo Cabral Silva
Redes Neurais Artificiais no Ambiente de Redes
Industriais
Foundation Fieldbus
Usando Blocos
Padr˜
oes
Disserta¸c˜ao submetida ao Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica do Centro de Tecnologia da Universidade Federal do Rio Grande do Norte, como parte dos requisitos necess´arios para obten¸c˜ao do grau de Mestre em Ciˆencias.
Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica
Aprovada em 15 de Fevereiro de 2005 pela comiss˜ao examinadora, formada pelos seguintes membros:
Prof. D.Sc. Adri˜ao Duarte D´oria Neto (Orientador) DCA - UFRN
Prof. D.Sc. Luiz Affonso Henderson Guedes de Olivera (Co-Orientador) DCA - UFRN
Prof. D.Sc. J´es de Jesus Fiais Cerqueira (Examinador Externo) UFBA
Prof. D.Sc. Jorge Dantas de Melo (Primeiro Examinador Interno) DCA - UFRN
Prof. D.Sc. Andr´e Laurindo Maitelli (Segundo Examinador Interno) DCA - UFRN
Gostaria de agradecer a toda minha fam´ılia, que sempre me incentivou aos estudos, em especial aos meus pais, Jorge Eider e Maria das Gra¸cas, que formaram a base para a minha educa¸c˜ao.
N˜ao poderia deixar de agradecer tamb´em a todos os integrantes do projeto REDE 10/06 que convivem e crescem comigo a cada dia, em especial aos professores Adri˜ao, Jorge e Affonso, que depositaram confian¸ca em meu trabalho e foram muito pacientes no acompanhamento do mesmo. Outras pessoas que tamb´em merecem agradecimentos especiais s˜ao: o amigo de faculdade e hoje, colega de laborat´orio, F´abio Lima, que ajudou bastante na adapta¸c˜ao do ´ultimo experimento realizado neste trabalho; e o amigo e tamb´em professor, Allan Medeiros, que sempre demonstrou interesse em discutir assuntos pertinentes ao trabalho.
No mais, a todas as pessoas que de alguma forma contribu´ıram com este trabalho, como, minha namorada e os amigos mais pr´oximos.
As redes para automa¸c˜ao industrial vˆem se destacando e substituindo aos poucos as arquiteturas mais antigas dos sistemas utilizados na ´area de automa¸c˜ao. Dentre as redes para automa¸c˜ao industrial j´a existentes, a que mais se destaca ´e aFoundation Fieldbus (FF). Essa arquitetura foi escolhida para desenvolver o presente trabalho devido `a completa especifica¸c˜ao da camada de aplica¸c˜ao e, por causa da sua interface com o usu´ario, organizada em blocos, o que possibilita a interoperabilidade entre os dispositivos de fabricantes diferentes. Atualmente, uma das aplica¸c˜oes mais procuradas na automa¸c˜ao industrial ´e a medi¸c˜ao indireta, que consiste em inferir um valor a partir das medidas de outros sensores. Isso pode ser realizado atrav´es da implementa¸c˜ao dos chamados software sensors, ou, sensores de software. Uma das ferramentas mais utilizadas no projeto e implementa¸c˜ao dos sensores de software
s˜ao as redes neurais artificiais. A falta de uma solu¸c˜ao padr˜ao que implemente redes neurais no ambiente de redes FF impossibilita o desenvolvimento de um projeto de medi¸c˜ao indireta para o campo, al´em de outros poss´ıveis projetos que envolvam redes neurais, a menos que se opte por uma solu¸c˜ao propriet´aria, o que n˜ao garante manter a interoperabilidade entre os dispositivos da rede, principalmente se esses forem de fabricantes diferentes. Visando manter a interoperabilidade, este trabalho objetiva desenvolver uma solu¸c˜ao para executar algoritmos de redes neurais artificiais no ambiente de redes para automa¸c˜ao industrial Foundation Fieldbus baseada em blocos funcionais padr˜oes. Ao fim deste trabalho, encontram-se alguns resultados da implementa¸c˜ao da solu¸c˜ao aqui abordada.
Industrial automation networks is in focus and is gradually replacing older architectures of systems used in automation world. Among existing automation networks, most prominent standard is theFoundation Fieldbus (FF). This particular standard was chosen for the development of this work thanks to its complete application layer specification and its user interface, organized as function blocks and that allows interoperability among different vendors’ devices. Nowadays, one of most seeked solutions on industrial automation are the indirect measurements, that consist in infering a value from measures of other sensors. This can be made through implementation of the so-called software sensors. One of the most used tools in this project and in sensor implementation are artificial neural networks. The absence of a standard solution to implement neural networks in FF environment makes impossible the development of a field-indirect-measurement project, besides other projects involving neural networks, unless a closed proprietary solution is used, which dos not guarantee interoperability among network devices, specially if those are from different vendors. In order to keep the interoperability, this work’s goal is develop a solution that implements artificial neural networks inFoundation Fieldbus
industrial network environment, based on standard function blocks. Along the work, some results of the solution’s implementation are also presented.
1 Introdu¸c˜ao 1
1.1 Evolu¸c˜ao da Automa¸c˜ao Industrial . . . 1
1.1.1 Breve Retrospecto . . . 1
1.1.2 Destaques das Redes Industriais . . . 2
1.1.3 A Escolha pela Foundation Fieldbus . . . 4
1.1.4 Software Sensors . . . 5
1.1.5 Motiva¸c˜ao e Objetivos do Trabalho . . . 5
1.2 Estrutura da Disserta¸c˜ao . . . 6
2 Foundation Fieldbus 7 2.1 Desenvolvimento Hist´orico . . . 7
2.2 Caracter´ısticas de Desempenho . . . 8
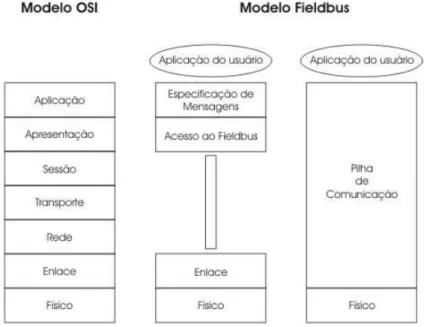
2.3 Modelo de Comunica¸c˜ao em Camadas . . . 9
2.3.1 Camada F´ısica . . . 10
2.3.2 Pilha de Comunica¸c˜ao . . . 15
2.3.3 Camada de Aplica¸c˜ao . . . 21
3 Redes Neurais Artificiais 26 3.1 Propriedades das Redes Neurais . . . 27
3.2 Modelos de um Neurˆonio . . . 28
3.2.1 Tipos de Fun¸c˜ao de Ativa¸c˜ao . . . 31
3.3 Arquiteturas de Redes Neurais . . . 34
3.3.1 Redes Alimentadas Adiante com Camada ´Unica . . . 35
3.3.2 Redes Alimentadas Diretamente com M´ultiplas Camadas . . . 35
3.3.3 Redes Recorrentes . . . 37
3.4 Processos de Aprendizagem . . . 37
4 Redes Neurais no Ambiente Foundation Fieldbus 39 4.1 Detalhamento T´ecnico . . . 39
5 Testes e Resultados 46
5.3 Exemplo 2: Fun¸c˜ao gaussiana . . . 52 5.4 Exemplo 3: Fun¸c˜ao quadr´atica de duas vari´aveis . . . 54 5.5 Exemplo 4: Fun¸c˜ao exponencial quadr´atica com duas vari´aveis . . . . 56 5.6 Exemplo 5: Controle de n´ıvel um tanque com dinˆamica n˜ao-linear . . 58
6 Conclus˜oes e Perspectivas 62
6.1 Vantagens e Desvantagens da Implementa¸c˜ao em Blocos Funcionais . 63
Referˆencias Bibliogr´aficas 66
1.1 Esquema de um software sensor. . . 5
2.1 Logomarca dos membros da Fieldbus Foundation. . . 8
2.2 Malha de controle baseada na tecnologia Foundation Fieldbus [4]. . . 10
2.3 Modelo de comunica¸c˜ao em camadas. . . 11
2.4 Estrutura f´ısica do barramento de comunica¸c˜ao da Foundation Fieldbus [4]. . . 11
2.5 Topologia mista em uma rede H1. . . 13
2.6 Comunica¸c˜ao s´ıncrona baseada na lista de transmiss˜ao [4]. . . 17
2.7 Transmiss˜ao s´ıncrona e comunica¸c˜ao ass´ıncrona[4]. . . 18
2.8 Transmiss˜ao ass´ıncrona com token[4]. . . 19
2.9 Controle de comunica¸c˜ao pelo LAS [4]. . . 20
2.10 Divis˜ao do dispositivo de campo em blocos[4]. . . 22
2.11 Conex˜ao de blocos funcionais [4]. . . 25
3.1 Modelo de um neurˆonio artificial. . . 29
3.2 Transforma¸c˜ao afim produzida pela presen¸ca do bias. . . 30
3.3 Representa¸c˜ao alternativa no modelo de um neurˆonio artificial. . . 31
3.4 Fun¸c˜ao de limiar. . . 32
3.5 Fun¸c˜ao linear por partes. . . 32
3.6 Fun¸c˜ao sigm´oide com parˆametro de inclina¸c˜ao vari´avel. . . 33
3.7 Rede alimentada adiante com apenas uma camada de neurˆonios. . . . 35
3.8 Rede alimentada adiante totalmente conectada com uma camada oculta e uma camada de sa´ıda. . . 36
3.9 Rede recorrente sem neurˆonios ocultos. . . 37
4.1 Esquema interno do bloco aritm´etico padr˜ao FF. . . 40
4.2 Esquema interno do bloco caracterizador de sinais padr˜ao FF. . . 41
4.3 Fun¸c˜ao tangente sigm´oide, usada como fun¸c˜ao de ativa¸c˜ao. . . 42
4.4 Pontos fornecidos pelo algoritmo gen´etico. . . 43
4.7 Neurˆonio artificial implementado no ambiente Foundation Fieldbus. . 45
5.1 Arquitetura do laborat´orio did´atico. . . 47
5.2 Teste de precedˆencia no ambiente FF. . . 48
5.3 Sa´ıda do bloco “arit2” para o teste de precedˆencia. . . 48
5.4 Fun¸c˜ao exponencial . . . 49
5.5 Arquitetura de rede neural utilizada para o experimento 1. . . 50
5.6 Resultado no ambiente de simula¸c˜ao. . . 50
5.7 Organiza¸c˜ao dos blocos funcionais correspondente a respectiva rede neural. . . 51
5.8 Resultado no ambiente real FF. . . 51
5.9 Distribui¸c˜ao dos pontos do conjunto de treinamento. . . 52
5.10 Sa´ıda da rede neural no ambiente de simula¸c˜ao. . . 53
5.11 Conjunto de dados de treinamento com trˆes dimens˜oes. . . 54
5.12 Arquitetura de rede neural utilizada para o experimento 3. . . 55
5.13 Resposta da rede neural no ambiente simulado para o exemplo 3. . . 55
5.14 Malha formada pelos pontos do conjunto de treinamento. . . 56
5.15 Arquitetura de rede neural utilizada no experimento 4. . . 57
5.16 Resultado da rede no ambiente de simula¸c˜ao. . . 57
5.17 Modelo do tanque a ser controlado. . . 59
5.18 Fun¸c˜ao de pondera¸c˜ao dos PIDs. . . 60
5.19 Esquema dos blocos funcionais. . . 60
5.20 Fun¸c˜ao de pondera¸c˜ao dos PIDs. . . 61
5.21 Sinais de controle, PIDs e rede neural. . . 61
2.1 Tamanho m´aximo dos ramos H1[4]. . . 12
2.2 Cabos fieldbus e seus respectivos tamanhos m´aximos[4]. . . 13
2.3 Lista de transmiss˜ao s´ıncrona. . . 16
2.4 Blocos funcionais t´ıpicos. . . 22
Introdu¸
c˜
ao
1.1
Evolu¸
c˜
ao da Automa¸
c˜
ao Industrial
1.1.1
Breve Retrospecto
O controle das plantas industriais inicialmente utilizava tecnologia pneum´atica. Esta foi posteriormente substitu´ıda pela tecnologia eletrˆonica anal´ogica, e depois pela eletrˆonica digital. Com o advento do controle digital, os sistemas passaram a ter uma separa¸c˜ao f´ısica mais acentuada entre o processo e os instrumentos de controle. A partir da d´ecada de 80, come¸caram a ser criados padr˜oes para a comunica¸c˜ao entre os instrumentos de um sistema de automa¸c˜ao. Surgiam, ent˜ao, as primeiras redes industriais, criadas para que o controle pudesse ser feito a grandes distˆancias do processo [14].
A evolu¸c˜ao das arquiteturas de sistemas de controle para ind´ustria tem uma forte rela¸c˜ao com as tecnologias de transmiss˜ao de sinais, de forma que cada avan¸co na ´area de transmiss˜ao de sinais levou a um conseq¨uente avan¸co na arquitetura utilizada. Percebe-se que, `a medida que estas tecnologias avan¸caram, as arquiteturas dos sistemas de controle passaram a ser cada vez mais descentralizadas.
A primeira arquitetura de controle digital que se pode citar ´e a DDC (Direct Digital Control - Controle Digital Direto), que surgiu na d´ecada de 1970. Nessa arquitetura, o comando era feito de forma direta, ou seja, uma unidade central realizava todas as opera¸c˜oes de controle e acionamento [5].
Como toda a estrat´egia de controle era realizada em um ´unico elemento
centralizador, um problema em algum la¸co de controle era capaz de comprometer o sistema inteiro.
Em seguida surgiu uma arquitetura chamada DCS (Distributed Control System
- Sistema de Controle Distribu´ıdo). Na mesma ´epoca, surgiam os primeiros PLCs (Programmable Logic Controller) - os famosos Controladores L´ogicos Program´aveis. Tanto os sistemas DCS quanto os sistemas baseados em PLCs se caraterizavam por distribuir o controle em v´arias unidades, em oposi¸c˜ao `a abordagem do DDC. Isso trouxe um ganho imediato no sentido de que uma falha em um dos la¸cos de controle n˜ao comprometeria o sistema inteiro, mas apenas os dispositivos atribu´ıdos a ele. A diferen¸ca b´asica entre os dois sistemas era que o DCS era voltado ao controle de processo cont´ınuo, enquanto que o PLC era destinado ao controle discreto, como comando l´ogico e inter-travamento. Atualmente, essa divis˜ao ficou difusa, pois os PLCs incorporaram funcionalidades dos DCSs e vice-versa.
Mais recentemente, surgiram solu¸c˜oes que fazem uso de uma nova arquitetura de sistemas de controle, a FCS (Field Controller System - Sistema de Controle de Campo). Com o advento da arquitetura FCS, a estrat´egia de controle foi ainda mais distribu´ıda, de forma que agora cada dispositivo de campo seria capaz de participar de parte do controle, consistindo em um controle verdadeiramente descentralizado. A princ´ıpio, pode parecer estranho a substitui¸c˜ao de um potente computador por dispositivos de campo com limitada capacidade de processamento. Por´em, uma das grandes vantagens que a arquitetura FCS traz ´e que cadahardwarenovo incorporado `a rede ´e uma nova unidade que pode realizar controle, inclusive possibilitando redundˆancia, escalabilidade e tornando os la¸cos de controle ainda mais seguros [5].
1.1.2
Destaques das Redes Industriais
Uma sens´ıvel vantagem do uso de instrumenta¸c˜ao digital em rede ´e a redu¸c˜ao de cabeamento dos sensores aos equipamentos coletores. Em alguns casos, o pr´oprio cabo de alimenta¸c˜ao tamb´em ´e o cabo utilizado para a rede de dados. Como a informa¸c˜ao ´e digital, uma s´erie de dados adicionais, al´em da medi¸c˜ao, podem ser transmitidos, como medidas da qualidade do sinal medido ou informa¸c˜oes de diagn´ostico do sensor.
´
era invi´avel quando as medi¸c˜oes eram puramente anal´ogicas. A possibilidade de se obter informa¸c˜ao do estado do sensor ´e extremamente bem-vinda para se melhorar o processo de automa¸c˜ao industrial, uma vez que, manuten¸c˜oes preventivas podem ser otimizadas e falhas por quebra, imprecis˜ao ou baixa confiabilidade podem ser reduzidas, gerando-se uma grande economia para o processo como um todo, que passar´a a ter um tempo de paradas para manuten¸c˜ao bem menor.
Essa rede permite ainda que se configure equipamentos remotamente, facilitando a instala¸c˜ao ou altera¸c˜ao de parˆametros destes. Tal recurso pode evitar que um profissional tenha de se deslocar geograficamente para realizar uma configura¸c˜ao de um equipamento, o que tamb´em pode significar corte de gastos para a empresa em quest˜ao.
Por fim, a informa¸c˜ao digital ´e mais imune a ru´ıdos do que a anal´ogica. Adicionalmente, pode-se armazenar os dados em uma mem´oria tempor´aria para retransmiss˜ao, caso algum problema na transmiss˜ao anterior ocorra, ou simplesmente se queira ter acesso a um hist´orico de leituras, caso em que o sensor estaria atuando como um registrador.
Alguns pontos fracos da instrumenta¸c˜ao em rede, por´em, tamb´em devem ser levados em conta: o funcionamento do sistema supervis´orio, ou em alguns casos at´e o funcionamento do processo, dependem do bom estado da rede. Se a rede n˜ao funciona ou tem um ´ındice de indisponibilidade elevado, isto ir´a causar preju´ızo `a automa¸c˜ao. Os padr˜oes mais atuais tornam os equipamentos bastante autˆonomos, de forma que, mesmo que a rede pare de funcionar temporariamente, o equipamento continuar´a realizando a tarefa para qual foi configurado, como, por exemplo, realizar o controle de uma vari´avel de processo.
seguran¸ca, que s˜ao dispositivos ´opticos usados para fazer os acoplamentos dos cabos de instrumentos.
1.1.3
A Escolha pela
Foundation Fieldbus
Dentre as v´arias tecnologias de Sistemas de Controle de Campo, destacam-se as redes Foundation Fieldbus (FF) [4] por apredestacam-sentarem duas caracter´ısticas particulares e decisivas. Uma delas ´e a padroniza¸c˜ao da camada de aplica¸c˜ao, que ´e dividida em blocos contendo funcionalidades espec´ıficas. E a segunda, como conseq¨uˆencia da primeira somada `a possibilidade de processamento distribu´ıdo (os dispositivos FF s˜ao providos de processador e mem´oria e s˜ao capazes de executar seus pr´oprios algoritmos de controle), ´e a flexibilidade que a arquitetura permite ao engenheiro de automa¸c˜ao desenvolver sua estrat´egia de controle.
A padroniza¸c˜ao ´e de extrema importˆancia em uma funda¸c˜ao onde est˜ao filiadas dezenas de empresas, com interesse em produzir tecnologia compat´ıvel entre si. Ela garante a interoperabilidade entre os produtos das v´arias empresas associadas, al´em de abrir a possibilidade de escolha, por parte dos clientes, dentre dispositivos de v´arios fabricantes, sem sair da tecnologia FF.
Os blocos funcionais, correspondentes `a camada de aplica¸c˜ao na tecnologia FF, tˆem um papel de grande importˆancia no sucesso da interoperabilidade. Essa solu¸c˜ao simplifica o desenvolvimento de funcionalidades por permitir implementa¸c˜oes independentes, encapsuladas, que apresentam uma interface bem definida com o resto do ambiente, o que permite uma f´acil integra¸c˜ao de novas funcionalidades `as j´a existentes.
Atualmente, existem blocos funcionais que implementam diversos algoritmos no ambiente FF, alguns de extrema utilidade no mundo da automa¸c˜ao industrial, como mostrados no Cap´ıtulo 2. Por´em, com o constante avan¸co da ciˆencia, algoritmos mais inteligentes e ferramentas matem´aticas capazes de refor¸car as atividades do
1.1.4
Software Sensors
Software sensors ou sensores de software [10] nada mais s˜ao do que algoritmos computacionais utilizados para fazer medi¸c˜ao indireta. Desse modo, eles “substituem” um ou v´arios sensores f´ısicos, pois s˜ao capazes de inferir valores a partir de medidas de outros sensores. Um exemplo t´ıpico de sensores de software
pode ser visualizado na Figura 1.1, onde s˜ao fornecidas vari´aveis de entrada para o algoritmo e por sua vez, ele fornece como sa´ıda, a grandeza que se deseja medir.
Figura 1.1: Esquema de um software sensor.
Umas das ferramentas matem´aticas mais utilizadas na implementa¸c˜ao de
software sensor s˜ao as redes neurais artificiais, pela capacidade de aprendizado e generaliza¸c˜ao de fun¸c˜oes n˜ao-lineares [10].
1.1.5
Motiva¸
c˜
ao e Objetivos do Trabalho
Este trabalho ´e fruto do projeto REDE10/06, que por sua vez, teve como proposta inicial, a investiga¸c˜ao das t´ecnicas de auto-calibra¸c˜ao, auto-valida¸c˜ao e auto-compensa¸c˜ao de sensores de campo FF [17]. De acordo com o projeto, essas t´ecnicas seriam implementadas atrav´es de t´ecnicas de inteligˆencia computacional, mais especificamente, redes neurais artificiais. A primeira abordagem para possibilitar essas funcionalidades, foi um poss´ıvel desenvolvimento de um bloco funcional padr˜ao FF que implementasse algoritmos de redes neurais artificiais [6]. Por´em, os custos elevados do ambiente de desenvolvimento tornaram essa alternativa invi´avel.
• Torna a solu¸c˜ao universal entre os equipamentos que seguem a especifica¸c˜ao FF.
• Diminui custos, visto que todos os blocos funcionais utilizados na solu¸c˜ao j´a est˜ao implementados.
• Mat´em a interoperabilidade, j´a que dispositivos de todos os fabricantes podem ter implementados os blocos padronizados.
Al´em destas, uma outra possibilidade ´e de se implementar t´ecnicas inteligentes em sistemas j´a em funcionamento sem ter que inserir nenhum componente externo. O sucesso desta abordagem torna, ainda, poss´ıvel outras possibilidades n˜ao propostas pelo projeto, tais como:
• Filtragem de sinais [8];
• Constru¸c˜ao de software sensors;
• Detec¸c˜ao de falhas [22];
• Controle inteligente.
Todas elas podendo ser implementadas diretamente nos dispositivos de campo.
1.2
Estrutura da Disserta¸
c˜
ao
O restante da disserta¸c˜ao est´a dividida da seguinte maneir: no Cap´ıtulo 2, ´e apresentada uma vis˜ao geral sobre as redes industriais padronizadas pela Fieldbus Foundation, detalhando-se o funcionamento do protocolo de comunica¸c˜ao utilizado entre os dispositivos de campo, enfatizando-se a camada de aplica¸c˜ao com o usu´ario.
No Cap´ıtulo 3, aborda-se as redes neurais artificiais, dando uma vis˜ao geral das arquiteturas existentes e de suas aplica¸c˜oes. D´a-se ˆenfase a arquitetura Multi Layer Perceptron (MLP) e ao algoritmo de treinamento Backpropagation, que s˜ao utilizados neste trabalho.
Foundation Fieldbus
2.1
Desenvolvimento Hist´
orico
Em 1992 um grupo internacional, o ISP - Interoperable System Project -foi fundado com a inten¸c˜ao de criar um padr˜ao internacionalmente uniforme de redes de campo para ser usado em ´areas classificadas1. Ao mesmo tempo, os
fabricantes e usu´arios da FIP (Flux Information Processus), conhecida anteriormente como Factory Instrumentation Protocol, estabeleceram a organiza¸c˜ao internacional
WorldFIP [3]. Juntamente com a FIP North America, eles se tornaram uma forte concorrente ao cons´orcio ISP.
Em 1994, por raz˜oes t´ecnicas, econˆomicas e pol´ıticas, a ISP e a WorldFIP se juntaram para formar a Fieldbus Foundation. A Fieldbus Foundation ´e uma organiza¸c˜ao independente que n˜ao visa o lucro e cujo prop´osito ´e desenvolver e manter um padr˜ao internacionalmente uniforme de redes de campo para automa¸c˜ao de processos: oFoundation Fieldbus[4]. Os membros incluem usu´arios e fabricantes dos dispositivos de campo e dos sistemas de automa¸c˜ao. O objetivo da Fieldbus Foudation foi, e ainda ´e, criar um padr˜ao simples, universal, de redes de campo para ´areas classificadas e que foi amplamente difundido como rede de campo padronizada pelo IEC (International Engineering Consortium). O mesmo objetivo foi perseguido pela organiza¸c˜ao PROFIBUS [2] com sua rede de campo PROFIBUS PA. Enquanto a Profibus PA tem suas ra´ızes e ´e amplamente usada na Europa, a comunidade
Foundation Fieldbus ´e concentrada predominantemente na Am´erica e ´Asia [4].
1Entenda-se como ´areas classificadas, ambientes de ind´ustrias qu´ımicas que apresentam gases
inflam´aveis e substˆancias corrosivas, por exemplo.
A Fieldbus Foundation utiliza alguns elementos da FIP para a especifica¸c˜ao do padr˜ao Foundation Fieldbus (FF), e tamb´em - assim como a Profibus PA - alguns detalhes da especifica¸c˜ao ISP. Essa ´e a justificativa de o projeto do barramento f´ısico ser o mesmo para os dois sistemas. A interface de dispositivos para aplica¸c˜ao, a qual ´e baseada em blocos funcionais, exibe muitas caracter´ısticas comuns. Isso ´e pelo fato de os dois sistemas terem as mesmas ambi¸c˜oes. De qualquer forma, quando vistos mais de perto e comparando os dois sistemas, pode-se notar que existem grandes diferen¸cas entre eles.
O Foundation Fieldbus ´e um padr˜ao aberto que possibilita dispositivos de diferentes fabricantes serem integrados em um ´unico sistema (interoperabilidade). Isto ´e poss´ıvel apenas quando todos os dispositivos seguem exatamente a especifica¸c˜ao. Os dispositivos aprovados pelaFieldbus Foundation s˜ao uma garantia para o usu´ario e o fabricante que eles seguem a especifica¸c˜ao, e possuem a logomarca da funda¸c˜ao (Figura 2.1).
Figura 2.1: Logomarca dos membros da Fieldbus Foundation.
2.2
Caracter´ısticas de Desempenho
A Foundation Fieldbus provˆe uma vasta gama de servi¸cos e fun¸c˜oes, como por exemplo:
• seguran¸ca intr´ıseca para ´areas de risco;
• capacidade de comunica¸c˜ao multi-mestre;
• comportamento dinˆamico determin´ıstico;
• transferˆencia de dados distribu´ıda (DDT);
• modelo de blocos padronizado para interfaceamento uniforme dos dispositivos (interoperabilidade, intercambialidade) e
• op¸c˜oes de extens˜oes flex´ıveis baseada em descritores de dispositivo (DD).
Para a descri¸c˜ao das fun¸c˜oes de um dispositivo e para a defini¸c˜ao de um acesso uniforme aos dados, a Foundation Fieldbus cont´em blocos de fun¸c˜oes pr´e-definidos. Os blocos funcionais implementados em um dispositivo fornecem informa¸c˜oes sobre as tarefas que o dispositivo pode executar. Sensores tipicamente incluem as seguintes fun¸c˜oes:
‘Analog Input’ (Entrada Anal´ogica) e ‘Discrete Input’ (Entrada Digital)
Atuadores usualmente cont´em os seguintes blocos funcionais:
‘Analog Output’ (Sa´ıda Anal´ogica) e ‘Discrete Output’ (Sa´ıda Digital)
Os seguintes blocos foram projetados para controle de processos:
‘Proportional/Derivative’ (Controlador PD) e ‘Proportional/Integral/Derivative’ (Controlador PID)
A mudan¸ca para o paradigma de automa¸c˜ao de processos em rede - desde o n´ıvel da automa¸c˜ao at´e o n´ıvel de campo - resulta em uma abordagem flex´ıvel e com processamento distribu´ıdo. Isso diminui a carga em uma esta¸c˜ao de controle de processos centralizada, a qual pode ser substitu´ıda inteiramente por instala¸c˜oes de pequena escala. Assim, uma malha de controle inteira pode ser implementada com pequenas unidades, consistindo apenas de um sensor e um atuador com um controlador de processos integrado se comunicando atrav´es da rede Foundation Fieldbus, como pode ser visto na Figura 2.2.
2.3
Modelo de Comunica¸
c˜
ao em Camadas
Figura 2.2: Malha de controle baseada na tecnologiaFoundation Fieldbus [4].
alimenta¸c˜ao dos dispositivos pode usar o mesmo cabo onde trafegam os dados. A camada de comunica¸c˜ao ´e composta por trˆes subcamadas: a subcamada inferior de enlace de dados (respons´avel pelo acesso ao meio f´ısico e controle de erro); a subcamada intermedi´aria de acesso a servi¸cos fieldbus - Fieldbus Access Sublayer
(FAS) - e a subcamada superior de montagem de mensagens - Fieldbus Message Specification (FMS). A camada de aplica¸c˜ao do usu´ario garante a interoperabilidade entre os dispositivos, sendo padronizada e completamente especificada. Nas pr´oximas sess˜oes, essas trˆes camadas FF ser˜ao abordadas com mais detalhes.
2.3.1
Camada F´ısica
A IEC fieldbus, resolveu o problema de comunica¸c˜ao usando dois sistemas de barramento, o lento, intrisicamente seguro, H1, e o r´apido, H2, barramento de alto n´ıvel com velocidade de 1 a 2,5 MBit/s [4].
Figura 2.3: Modelo de comunica¸c˜ao em camadas.
Figura 2.4: Estrutura f´ısica do barramento de comunica¸c˜ao daFoundation Fieldbus
[4].
Barramento H1
A especifica¸c˜ao do barramento H1 ´e baseado na IEC 61158-2, que possui as seguintes caracter´ısticas [4]:
• Codifica¸c˜ao Manchester para a transferˆencia de dados com velocidade de transferˆencia de 31,25 kBit/s.
• Para realizar a comunica¸c˜ao ´e necess´ario que o dispositivo tenha tens˜ao o suficiente. Cada dispositivo deve ter no m´ınimo 9 volts. Para ter certeza que este requisito est´a satisfeito, ferramentas de software est˜ao dispon´ıveis para calcular as correntes resultantes e as tens˜oes nos terminais baseando-se na topologia da rede, resistˆencia na linha e a tens˜ao da fonte.
• O padr˜ao H1 permite que os dispositivos sejam alimentados pelo pr´oprio
barramento. A fonte de alimenta¸c˜ao ´e conectada ao barramento da mesma maneira que um dispositivo de campo. Dispositivos que n˜ao s˜ao alimentados pelo barramento devem ser adicionalmente conectados a suas pr´oprias fontes de alimenta¸c˜ao.
• Quando o barramento H1 alimenta os dispositivos, deve-se ter certeza que o consumo da energia necess´aria para isso seja menor que a energia disponibilizada pela fonte de alimenta¸c˜ao.
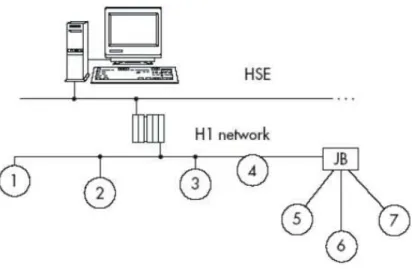
• As topologias utilizadas s˜ao geralmente em linha ou, quando equipadas com caixas de jun¸c˜ao (JB), podem ser em estrela ou em ´arvore, ou at´e uma combina¸c˜ao destas. Os dispositivos s˜ao melhor conectados com conectores em “T” que possibilitam conex˜oes e desconex˜oes de dispositivos sem interromper a comunica¸c˜ao (Figura 2.5).
• O tamanho m´aximo de um ramo do barramento ´e limitado em 120 metros e tamb´em depende no n´umero de ramos usados e do n´umero de dispositivos por ramo (Tabela 2.1).
Tabela 2.1: Tamanho m´aximo dos ramos H1[4]. N´umero de
dispositivos 1 dispositivo por ramo 2 dispositivos por ramo 3 dispositivos por ramo 4 dispositivos por ramo
25-32 1 m 1 m 1 m 1 m
19-24 30 m 1 m 1 m 1 m
15-18 60 m 30 m 1 m 1 m
13-14 90 m 60 m 30 m 1 m
Figura 2.5: Topologia mista em uma rede H1.
• Sem repetidores, o tamanho de um segmento H1 pode chegar at´e 1900 metros. Por´em, pode-se usar at´e 4 repetidores, o que d´a para interligar 5 segmentos H1 contendo 1900 metros cada, o que totaliza 9500 metros. Todos os ramos s˜ao inclusos nos c´alculos do tamanho total.
• O n´umero de dispositivos por segmento ´e limitado em 32 em ´areas intrisicamente seguras. Em ´areas de risco esse n´umero ´e reduzido por causa das limita¸c˜oes de fonte de energia e dependem do n´ıvel de seguran¸ca exigido.
• V´arios tipos de cabo podem ser usados como barramento H1 (Tabela 2.2). O cabo tipo A ´e o mais recomendado e apenas com ele o tamanho do segmento pode chegar a 1900 metros.
Tabela 2.2: Cabos fieldbus e seus respectivos tamanhos m´aximos[4]. Tipo A Tipo B Tipo C Tipo D Descri¸c˜ao par tran¸cado
blindado par simples ou multi tran¸cado blindado par multi tran¸cado sem blindagem par n˜ao tran¸cado sem blindagem, multi n´ucleo ´
Area da sec¸c˜ao
0.8mm2
(AWG 18)
0.32mm2
(AWG 22)
0.13mm2
(AWG 26)
1.25mm2
(AWG 16) Comprimento
m´aximo incluindo ramos
• E necess´ario ter dois terminadores por segmento, sempre nas pontas da linha´ de transmiss˜ao.
• N˜ao ´e necess´ario que os cabos sejam blindados, por´em, ´e recomendado a fim de se evitar interferˆencias e para melhor desempenho do sistema.
O Barramento High Speed Ethernet (HSE)
O HSE ´e baseado na tecnologia padr˜ao Ethernet. Os componentes utilizados s˜ao amplamente difundidos e encontrados por baixos custos. O HSE funciona a 100 MBit/s e al´em dos fios el´etricos tamb´em podem ser usados cabos de fibra ´optica como meio de transmiss˜ao.
OEthernet opera usando o algoritmo aleat´orio (n˜ao determin´ıstico) CSMA-CD para acesso ao barramento. Esse m´etodo s´o pode ser usado em algumas aplica¸c˜oes de automa¸c˜ao, pois na maioria dos casos, elas exigem capacidade de tempo-real. A taxa de transmiss˜ao extremamente alta permite ao barramento responder suficientemente r´apido quando sua carga est´a baixa, com poucos dispositivos [21].
Se a carga no barramento precisar ser reduzida em conseq¨uˆencia dos muitos dispositivos conectados, ou se a inten¸c˜ao ´e juntar v´arios segmentos HSE em uma ´unica grande rede, ent˜ao, deve-se usar equipamentos chamados de Ethernet Switches. UmSwitch lˆe o endere¸co de destino dos pacotes que devem ser repassados e redireciona-os para o segmento de rede correto. Dessa maneira, a carga do barramento e o tempo de acesso podem ser manipulados de acordo com as necessidades.
Em rela¸c˜ao `as exigˆencias da automa¸c˜ao industrial, caracter´ısticas de tempo real s˜ao necess´arias para controle de processos, enquanto que para atividades de supervis˜ao, em muitos casos, podem ser usados sistemas n˜ao determin´ısticos [15].
2.3.2
Pilha de Comunica¸
c˜
ao
Os dispositivos de campo Foundation Fieldbus s˜ao capazes de assumir fun¸c˜oes de controle de processos. Essa op¸c˜ao ´e baseada na comunica¸c˜ao distribu´ıda, o que garante que:
• cada dispositivo de campo possa trocar informa¸c˜oes com outros instrumentos da rede;
• a execu¸c˜ao das diversas malhas de controle (independentes) n˜ao se influenciam em rela¸c˜ao a tempo, e
• dois ou mais dispositivos nunca acessam o barramento simultaneamente.
Para garantir esses requisitos, o H1 da Foundation Fieldbus usa um sistema de controle de comunica¸c˜ao central: oLink Active Scheduler (LAS).
O LAS controla e organiza a comunica¸c˜ao sobre o barramento. Ele controla as atividades do barramento usando diferentes comandos, que s˜ao enviados via
broadcast para os dispositivos. Pelo fato do LAS estar sempre procurando endere¸cos de dispositivos n˜ao associados, ´e poss´ıvel conectar novos dispositivos durante a opera¸c˜ao e integr´a-los `a comunica¸c˜ao do barramento.
Dispositivos que tˆem a capacidade de se tornar LAS s˜ao chamados de Link Master, enquanto que dispositivos b´asicos n˜ao tˆem essa capacidade. Assim, em um sistema redundante contendo v´arios Link Masters, um deles poder´a se tornar LAS se o LAS ativo falhar.
Os servi¸cos de comunica¸c˜ao Foundation Fieldbus utilizam transmiss˜oes de dados agendados (s´ıncronos) e n˜ao agendados (ass´ıncronos). Tarefas de tempo cr´ıtico, como o controle de uma vari´avel de processo, s˜ao exclusivamente executadas por servi¸cos agendados, por outro lado, a parametriza¸c˜ao e as fun¸c˜oes de diagn´ostico utilizam os servi¸cos de comunica¸c˜ao n˜ao agendados.
Transmiss˜ao de dados agendada (s´ıncrona)
O LAS periodicamente difunde (atrav´es debroadcast) um sinal de sincroniza¸c˜ao (TD:Time Distribution) na rede para que todos os dispositivos tenham exatamente o mesmo tempo como referˆencia. Em transmiss˜oes agendadas, o tempo e a seq¨uˆencia s˜ao exatamente definidos dentro de um macro-ciclo. Por isso, ele ´e dito um sistema determin´ıstico.
A Tabela 2.3 representa um exemplo de agendamento de um sistema com dois sensores e dois controladores de v´alvula. O agendamento determina quando os dispositivos ir˜ao executar seus blocos funcionais (AI, AO, PID) e quando eles v˜ao transmitir dados.
Tabela 2.3: Lista de transmiss˜ao s´ıncrona. Dispositivo Tipo A¸c˜ao Offset
1 sensor execu¸c˜ao AI(1) 0 1 sensor transmiss˜ao AI(1) 20 2 sensor execu¸c˜ao AI(2) 0 2 sensor transmiss˜ao AI(2) 30 3 Atuador execu¸c˜ao PID(3) 40 3 Atuador execu¸c˜ao AO(3) 62
Cada atividade a ser executada ´e agendada para um certo tempo. Esse tempo ´e definido por um valor de offset, o qual reflete o atraso em rela¸c˜ao ao come¸co do ciclo de execu¸c˜ao.
Baseado nesse agendamento, uma lista de transmiss˜ao ´e gerada definindo quando um dispositivo de campo espec´ıfico estar´a apto a enviar seus dados. Ao receber a mensagem, o respectivo dispositivo (publisher) transmite embroadcast a informa¸c˜ao que estava em seu buffer para todos os dispositivos da rede que est˜ao configurados para receber os dados (subscriber). Esse tipo de transmiss˜ao de dados ´e conhecido comopublisher-subscriber.
O LAS ciclicamente envia os dados de acordo com a lista para todos osbuffers de dados em todos os dispositivos. Cada ciclo de transmiss˜ao de dados ´e explicitamente ativado pelo LAS e ´e conhecido como macro-ciclo (Figura 2.6). O LAS utiliza o seguinte procedimento:
dispositivo.
• Assim que o dispositivo recebe o CD, ele publica os dados do seu buffer na rede.
• Os subscribers dessa mensagem (como por exemplo, o dispositivo “c”, que ´e um controlador de v´alvula) podem ler e avaliar esses dados.
Figura 2.6: Comunica¸c˜ao s´ıncrona baseada na lista de transmiss˜ao [4].
Cada dispositivo de campo recebe um agendamento separadamente. Isso permite ao sistema de gerenciamento saber exatamente qual tarefa ´e para ser executada e quando deve-se receber ou enviar dados. Por exemplo, para o ciclo mencionado anteriormente, a seq¨uencia de a¸c˜oes no tempo est´a ilustrada na Figura 2.7 e descrita a seguir:
• No tempo zero, os sensores (1) e (2) come¸cam a fazer suas medidas.
• No tempo 20, o LAS permite ao sensor (1) que ele publique suas medidas para que o PID do controlador de v´alvula (3) possa recebˆe-las.
• No tempo 30, o LAS permite ao sensor (2) que ele publique seus dados para que o PID do controlador de v´alvula (4) possa lˆe-los.
• No tempo 40, os dois controladores de v´alvula processam seus blocos funcionais PID.
• No tempo 57 o controlador de v´alvula (4) come¸ca seu processo de atua¸c˜ao.
Figura 2.7: Transmiss˜ao s´ıncrona e comunica¸c˜ao ass´ıncrona[4].
• No tempo 140, todo o ciclo ´e repetido.
Cada malha de controle acessa o barramento apenas uma vez em um intervalo pequeno de tempo. Por´em, o barramento pode ser usado por muitas outras malhas de controle, e tamb´em para outras atividades. Isso mostra que a estrat´egia de controle distribu´ıdo reduz drasticamente o n´umero de transmiss˜oes de dados sobre o barramento.
Transmiss˜ao de dados n˜ao agendada (ass´ıncrona)
Parˆametros de dispositivos e dados de diagn´ostico podem ser transmitidos quando requisitados. A transmiss˜ao desses dados n˜ao ´e cr´ıtica em rela¸c˜ao ao tempo. Para esse tipo de comunica¸c˜ao aFoundation Fieldbusprovˆe a transmiss˜ao ass´ıncrona (n˜ao agendada).
intervalo (ver Figura 2.7).
A permiss˜ao para um certo dispositivo usar o barramento ´e garantida pelo LAS quando ele passa um comando PT (pass token) ao dispositivo. O PT ´e enviado a todos os dispositivos que entraram naLive List (Figura 2.8), a qual ´e administrada pelo LAS. Cada dispositivo pode usar o barramento at´e que retorne otoken ou at´e que o m´aximo de tempo garantido seja atingido.
A Live List ´e constantemente atualizada pelo LAS. Este, envia um comando especial, o Probe Node (PN), para os endere¸cos que n˜ao est˜ao na Live List, procurando por dispositivos rec´em adicionados. Se um dispositivo retornar um
Probe Response (PR), o LAS adiciona esse dispositivo `a Live List e ele passar´a a receber o PT para comunica¸c˜ao ass´ıncrona de acordo com a ordem de entrada na
Live List. Dispositivos que n˜ao responderem ao comando PT ou retornar o token
depois de trˆes tentativas sucessivas s˜ao removidos da Live List.
Figura 2.8: Transmiss˜ao ass´ıncrona comtoken[4].
Agendamento da Comunica¸c˜ao
O LAS segue um agendamento estrito (Figura 2.9) para garantir que a comunica¸c˜ao ass´ıncrona usando o token assim como os comandos TD ou PN n˜ao interfiram na comunica¸c˜ao s´ıncrona.
Antes de cada opera¸c˜ao, o LAS consulta a lista de transmiss˜ao para checar por alguma transmiss˜ao agendada. Se for o caso, ele espera (modo idle) por, precisamente, o tempo agendado e ent˜ao envia o comando Compel Data (CD) para ativar a opera¸c˜ao.
No caso de n˜ao haver comunica¸c˜oes agendadas e existir tempo dispon´ıvel para opera¸c˜oes extras, o LAS envia um dos comandos a seguir: O PN, para procurar por novos dispositivos; um comando TD para que todos os dispositivos estejam exatamente no mesmo tempo; ou o comando PT para passar otokenda comunica¸c˜ao ass´ıncrona. Esse ciclo fica se repetindo, come¸cando sempre pela checagem na lista de transmiss˜ao.
Figura 2.9: Controle de comunica¸c˜ao pelo LAS [4].
2.3.3
Camada de Aplica¸
c˜
ao
Uma caracter´ıstica importante para um sistema de redes de campo ser aceito no mercado ´e a interoperabilidade dos dispositivos. Interoperabilidade ´e a capacidade de dispositivos de diferentes fabricantes se comunicarem entre si. Adicionalmente, deve-se garantir que um dispositivo de um fabricante qualquer possa ser substitu´ıdo por um de outro fabricante, o que ´e chamado de intercambialidade.
Isso requer uma especifica¸c˜ao aberta de um protocolo que defina fun¸c˜oes uniformes de dispositivos e interfaces para aplica¸c˜ao. Para que outros dispositivos da rede esoftwares aplicativos possam usar essas interfaces para acessar as fun¸c˜oes e os parˆametros dos dispositivos de campo. AFoundation Fieldbus implementa esses conceitos baseando-se em blocos e descritores de dispositivos.
Modelo de Blocos
A Foundation Fieldbus associa todas as fun¸c˜oes e dados dos dispositivos a trˆes tipos de blocos (Figura 2.10), cuja associa¸c˜ao depende do tipo do dispositivo. Dependendo da funcionalidade do dispositivo, ele pode ser descrito da seguinte maneira:
• bloco de recurso (Resource Block);
• um ou m´ultiplos blocos funcionais e
• v´arios blocos transdutores, se necess´ario.
O bloco de recurso descreve caracter´ısticas de um dispositivo, como o nome, o fabricante, o n´umero serial, as vers˜oes do hardware e firmware, etc.
Os blocos funcionais descrevem as funcionalidades do dispositivo e definem como elas podem ser acessadas. Cada bloco tem um objetivo al´em de suas pr´oprias entradas e sa´ıdas. Cada dispositivo ´e equipado com pelo menos um bloco funcional.
A especifica¸c˜ao FF define conjuntos de blocos padr˜ao que podem ser usados para descrever as funcionalidades b´asicas. Eles est˜ao listados na Tabela 2.4.
Figura 2.10: Divis˜ao do dispositivo de campo em blocos[4].
Tabela 2.4: Blocos funcionais t´ıpicos. Sigla Descri¸c˜ao do bloco
AI Analog Input (entrada anal´ogica) AO Analog Output (sa´ıda anal´ogica)
B Bias (bias)
CS Control Selector (seletor de controle) DI Discrete Input (entrada discreta) DO Discrete Output (sa´ıda discreta) ML Manual Loader (carregador manual)
PD Proportional/Derivative (proporcional/derivativo)
PID Proportional/Integral/Derivative (proporcional/integral/derivativo) RA Ratio (taxa)
funcionais. Eles podem ser usados para calibrar, deslocar medidas, posicionar dados, linearizar caracter´ısticas e converter unidades f´ısicas.
Ao lado dos trˆes tipos de blocos, os seguintes objetos tamb´em s˜ao definidos no modelo de blocos:
• Link Objects (liga¸c˜oes entre objetos) - definem as liga¸c˜ao entre os blocos funcionais, sendo essas internas em um dispositivo ou atrav´es da rede.
• Alert Objects (objetos de alerta) - permitem reportar alarmes e eventos na rede.
de blocos funcionais para acesso e an´alise a partir de sistemas de ato n´ıvel.
• View Objects (objetos de visualiza¸c˜ao) - s˜ao grupos predefinidos de dados e parˆametros de blocos que podem ser usados para ver e mostr´a-los rapidamente de acordo com suas tarefas: controle de processos, configura¸c˜ao, manuten¸c˜ao, informa¸c˜oes adicionais, etc.
Descri¸c˜oes de Dispositivos
Durante a inicializa¸c˜ao ou no gerenciamento, um sistema de comunica¸c˜ao aberto deve garantir que computadores de alto n´ıvel (supervis˜ao) possam acessar todos os dados dos dispositivos de campo e ter o pr´oprio controle de como fazer isso.
As descri¸c˜oes de dispositivos (DDs) contˆem a informa¸c˜ao necess´aria para preencher esses requisitos. Elas fornecem a informa¸c˜ao necess´aria para entender o significado dos dados e apresent´a-los ao operador [11].
Para as fun¸c˜oes b´asicas dos dispositivos, a Foundation Fieldbus usa diferentes blocos funcionais e blocos transdutores. Por isso, diferentes DDs est˜ao dispon´ıveis e podem ser obtidos a partir da Fieldbus Foundation. Dispositivos FF podem interpretar e mostrar os dados e fun¸c˜oes desses blocos padronizados, assim como apresent´a-los ao usu´ario atrav´es de uma interface de opera¸c˜ao.
Se um fabricante implementa fun¸c˜oes e parˆametros extras em um dispositivo, ele deve definir o conte´udo, o acesso e a representa¸c˜ao em uma descri¸c˜ao de dispositivo completa (estendida). Somente com o DD completo o dispositivo pode ser operado e aplicado por inteiro.
As descri¸c˜oes de dispositivos s˜ao escritas usando aDevice Description Language - DDL (Linguagem de Descri¸c˜ao de Dispositivos) em forma de arquivo texto. Este arquivo ´e, ent˜ao, convertido com a ajuda de um ‘Tokenizer’ e distribu´ıdo via Internet. Se o fabricante registrou o seu dispositivo e seu respectivo DD `a FF, ent˜ao o DD pode ser obtido tamb´em, a partir daFieldbus Foundation.
Gerenciamento do Sistema
O sistema de gerenciamento de cada dispositivo tem as seguintes fun¸c˜oes:
transmiss˜ao s´ıncrona predefinida e
• processamento c´ıclico da lista de transmiss˜ao (apenas LAS), dentro do agendamento de tempo predefinido.
As atividades de responsabilidade do sistema de gerenciamento s˜ao:
• associa¸c˜ao autom´atica da fun¸c˜ao de LAS a outro dispositivo Link Master, se o LAS ativo falhar;
• sincroniza¸c˜ao doclock e
• endere¸camento autom´atico associado a cada novo dispositivo adicionado a rede.
O endere¸camento autom´atico permite a um dispositivo ser associado a apenas um endere¸co enquanto o processo estiver ativo.
Para o software que controla o endere¸camento autom´atico, existem endere¸cos especiais reservados onde os novos dispositivos podem ser acessados. Depois que um novo e ´unico endere¸co for associado ao novo dispositivo, ele ´e integrado na rede de comunica¸c˜ao e o endere¸co especial pode ser dispon´ıvel novamente para a utiliza¸c˜ao em outros dispositivos.
Configura¸c˜ao do Sistema
Todos os dispositivos de campo devem ser parametrizados antes da primeira inicializa¸c˜ao. Os DDs de todos os dispositivos usados devem entrar na configura¸c˜ao do dispositivo. O software deve ser capaz de acessar os DDs a partir de uma biblioteca predefinida, ou carreg´a-las a partir de fontes externas como drives de disquete, por exemplo.
A Figura 2.11 ilustra um exemplo de controle usando blocos funcionais onde o valor da sa´ıda do sensor ´e conectado a um bloco funcional PID. Esse bloco pode ser implementado, por exemplo, em um controlador de v´alvula posicionadora. A sa´ıda do bloco PID ´e ligada ao bloco AO (sa´ıda anal´ogica) do mesmo dispositivo, o que significa que esse dado n˜ao ´e transmitido pela rede.
Figura 2.11: Conex˜ao de blocos funcionais [4].
Al´em da interconex˜ao dos blocos funcionais, o software configurador tamb´em define o tamanho do ciclo de execu¸c˜ao. Baseado nesses dados e no diagrama da rede, a ferramenta de configura¸c˜ao gera a informa¸c˜ao necess´aria para controlar os dispositivos e a comunica¸c˜ao.
Finalmente, os dados s˜ao introduzidos em cada dispositivo de campo. Durante este processo, o LAS ´e configurado e todos os Link Masters recebem a atual lista de transmiss˜ao para comunica¸c˜ao s´ıncrona.
Redes Neurais Artificiais
O desenvolvimento das redes neurais artificiais, desde o seu surgimento, vem sendo impulsionado pelo fato de que o c´erebro humano processa informa¸c˜oes de maneira diferente de um computador digital convencional. O c´erebro pode ser visto como um computador extremamente complexo, n˜ao-linear e paralelo. Ele tem a capacidade de organizar seus constituintes estruturais, conhecidos por neurˆonios, de forma a realizar seus processamentos de maneira muito eficiente.
Na sua forma mais geral, uma rede neural artificial ´e um modelo matem´atico constru´ıdo para tentar modelar a maneira como o c´erebro realiza uma tarefa particular ou fun¸c˜oes de interesse; essa rede ´e geralmente implementada a partir de componentes eletrˆonicos ou simulada atrav´es da programa¸c˜ao em um computador digital. Para alcan¸carem um bom desempenho, as redes neurais empregam uma interliga¸c˜ao maci¸ca de c´elulas computacionais simples, denominadas neurˆonios.
Ent˜ao, pode-se definir uma rede neural como[13]:
“Um processador composto de unidades de processamentos simples, distribu´ıdas e paralelas, que tˆem a propens˜ao natural para armazenar conhecimento experimental e torn´a-lo dispon´ıvel para o uso. Ela se parece com o c´erebro em dois aspectos:
1. O conhecimento ´e adquirido pela rede a partir de seu ambiente atrav´es de um processo de aprendizagem.
2. For¸cas de conex˜ao entre neurˆonios, conhecidas como pesos sin´apticos, s˜ao utilizadas para armazenar o conhecimento adquirido”.
O procedimento utilizado para realizar o processo de aprendizegem ´e chamado
de algoritmo de aprendizagem, cuja fun¸c˜ao ´e alterar os pesos sin´apticos da rede de forma a alcan¸car um objetivo desejado.
3.1
Propriedades das Redes Neurais
Existem duas caracter´ısticas destac´aveis nas redes neurais. Primeiro, sua estrutura paralela e distribu´ıda. Segundo, sua habilidade de aprender e consequentemente de generalizar. A generaliza¸c˜ao refere-se ao fato de uma rede neural produzir sa´ıdas adequadas para entradas que n˜ao fizeram parte do conjunto de treinamento (aprendizagem). Essas duas propriedades de processamento de informa¸c˜ao tornam poss´ıvel para as redes neurais tratarem de forma vantajosa problemas complexos (de grande escala), quando comparadas com abordagens tradicionais [7] que s˜ao atualmente intrat´aveis. Outras propriedades das redes neurais s˜ao enumeradas a seguir [13]:
1. N˜ao-linearidade: Uma rede neural formada por neurˆonios n˜ao-lineares permite efetuar relacionamentos n˜ao-lineares entre entradas e sa´ıdas.
2. Mapeamento de entrada-sa´ıda: a aprendizagem supervisionada, ou aprendizagem com um “professor” envolve a modifica¸c˜ao dos pesos sin´apticos de uma rede neural pela aplica¸c˜ao de um conjunto de amostras de treinamento rotuladas ou exemplos da tarefa. Cada exemplo consiste de um sinal de entrada ´unico e de uma resposta desejada correspondente. Apresenta-se para a rede um exemplo escolhido ao acaso do conjunto, e os pesos sin´apticos (parˆametros livres) da rede s˜ao modificados para minimizar a diferen¸ca entre a resposta desejada e a resposta real da rede, produzida pelo sinal de entrada, de acordo com um crit´erio estat´ıstico apropriado. O treinamento da rede ´e repetido por muitos exemplos do conjunto at´e que a rede alcance um estado est´avel onde n˜ao haja mais modifica¸c˜oes significativas nos pesos sin´apticos. Os exemplos de treinamento previamente aplicados podem ser reaplicados durante a sess˜ao de treinamento, mas em uma ordem diferente. Assim, a rede aprende dos exemplos ao construir um mapeamento entrada-sa´ıda para o problema considerado.
neural treinada para atuar em um ambiente espec´ıfico pode ser facilmente retreinada para lidar com pequenas modifica¸c˜oes nas condi¸c˜oes operativas do ambiente. Al´em disso quando est´a operando em um ambiente n˜ao estacion´ario, uma rede neural pode ser projetada para modificar seus pesos sin´apticos em tempo real.
4. Resposta a evidˆencias: no contexto da classifica¸c˜ao de padr˜oes, uma rede neural pode ser projetada para fornecer informa¸c˜ao n˜ao somente sobre qual padr˜ao particular selecionar, mas tamb´em sobre a confian¸ca ou cren¸ca na decis˜ao tomada. Esta informa¸c˜ao pode ser utilizada para rejeitar padr˜oes amb´ıguos, caso eles estejam presentes, e com isso melhorar o desempenho de classifica¸c˜ao da rede.
5. Tolerˆancia a falhas: uma rede neural, implementada na forma f´ısica (em
hardware) ´e inerentemente tolerante a falhas, ou capaz de realizar computa¸c˜ao robusta, no sentido de que seu desempenho se degrada suavemente sob condi¸c˜oes de opera¸c˜ao adversas. Se um neurˆonio ou suas conex˜oes s˜ao danificados, por exemplo, a recupera¸c˜ao de um padr˜ao armazenado ´e prejudicada em qualidade. Contudo, devido a natureza distribu´ıda da informa¸c˜ao armazenada na rede, o dano deve ser extenso para que a resposta global da rede seja degradada seriamente. O que deve ser observado nessas condi¸c˜oes, ´e uma degrada¸c˜ao suave do desempenho em vez de uma falha seriamente comprometedora.
3.2
Modelos de um Neurˆ
onio
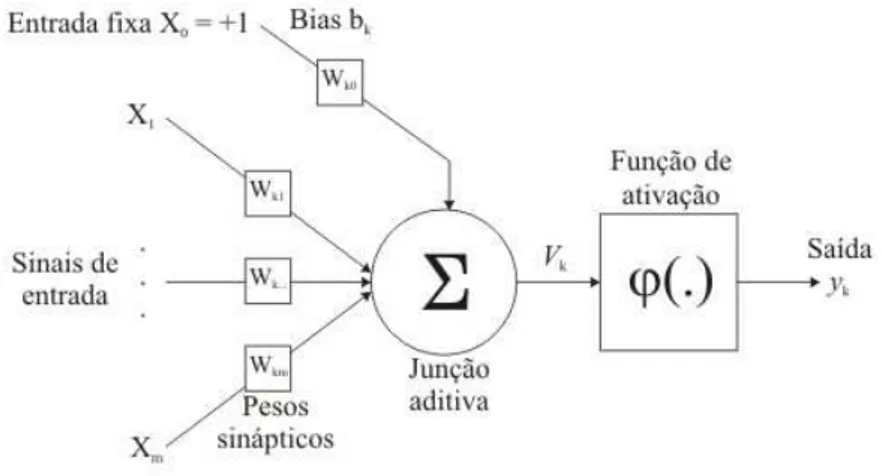
Um neurˆonio ´e uma unidade b´asica de processamento de informa¸c˜ao que ´e fundamental para o funcionamento de uma rede neural. A Figura 3.1 mostra o modelo de um neurˆonio, conhecido como modelo de McCulloch-Pitts, que forma a base para os projetos de redes neurais artificiais [7]. Identifica-se trˆes elementos b´asicos neste modelo neuronal.
1. Um conjunto de sinapses ou elos de conex˜ao, cada uma caracterizada por um peso ou for¸ca pr´opria. Especificamente, um sinal xj na entrada da sinapse
j conectada ao neurˆonio k ´e multiplicado pelo peso sinaptico wkj. Onde o
Figura 3.1: Modelo de um neurˆonio artificial.
segundo se refere ao terminal de entrada da sinapse `a qual o peso se refere. 2. Um combinador linear, para somar os sinais de entrada, ponderados pelas
respectivas sinapses do neurˆonio.
3. Uma fun¸c˜ao de ativa¸c˜ao para associar o sinal resultante do combinador linear, conhecido como potencial de ativa¸c˜ao, a um valor de sa´ıda, podendo aplicar n˜ao linearidade ou restri¸c˜ao. A fun¸c˜ao de ativa¸c˜ao ´e tamb´em definida como fun¸c˜ao restritiva, j´a que pode restringir (limitar) o intervalo permiss´ıvel de amplitude do sinal de sa´ıda a um valor finito. Geralmente essa limita¸c˜ao fica entre [0, 1] ou [-1, 1], por quest˜ao de normaliza¸c˜ao da informa¸c˜ao [7][13].
O modelo neuronal mostrado na Figura 3.1 inclui tamb´em um sinal de bias
aplicado externamente, representado por bk. Obias bk tem o efeito de aumentar ou
diminuir a entrada l´ıquida da fun¸c˜ao de ativa¸c˜ao, dependendo se ele ´e negativo ou positivo, respectivamente.
Em termos matem´aticos pode-se descrever um neurˆonio k escrevendo o seguinte par de equa¸c˜oes:
uk = m
j=1
wkjxj (3.1)
e
onde x1, x2, ..., xm s˜ao os sinais de entrada; wk1, wk2, ..., wkm s˜ao os pesos
sin´apticos do neurˆonio k; uk ´e a sa´ıda do combinador linear devido aos sinais de
entrada;bk´e o bias;ϕ(.) ´e a fun¸c˜ao de ativa¸c˜ao; eyk ´e o sinal de sa´ıda do neurˆonio.
O uso do bias bk tem o efeito de aplicar uma transforma¸c˜ao afim `a sa´ıda uk do
combinador linear do modelo da Figura 3.1, como mostrado a seguir:
vk=uk+bk (3.3)
Dependendo se o sinal debias bk´e positivo ou negativo, a rela¸c˜ao entre o campo
local induzido ou potencial de ativa¸c˜ao vk do neurˆonio k e a sa´ıda do combinador
linearuk´e modificada de forma mostrada na Figura 3.2. Nota-se que como resultado
desta transforma¸c˜ao afim, o gr´afico de vk em fun¸c˜ao de uk n˜ao passa mais pela
origem.
Figura 3.2: Transforma¸c˜ao afim produzida pela presen¸ca dobias.
O bias bk ´e um parˆametro externo do neurˆonio artificial k. Pode-se considerar
a sua presen¸ca como na equa¸c˜ao 3.2. Equivalentemente, pode-se formular a combina¸c˜ao das equa¸c˜oes 3.1 at´e 3.3 como segue:
vk = m
j=0
wkjxj (3.4)
e
Na equa¸c˜ao 3.4, adicionou-se mais uma sinapse. A sua entrada ´e
x0 = +1 (3.6)
e o seu peso ´e
wk0 =bk (3.7)
Pode-se, portanto, reformular o modelo do neurˆoniokcomo na Figura 3.3. Nessa figura, o efeito do bias ´e levado em conta de duas maneiras: (1) adicionando-se um novo sinal de entrada fixo em +1 e (2) adicionando-se um novo peso sin´aptico igual ao biasbk. Embora os modelos das Figuras 3.1 e 3.3 sejam aparentemente diferentes,
eles s˜ao matematicamente equivalentes.
Figura 3.3: Representa¸c˜ao alternativa no modelo de um neurˆonio artificial.
3.2.1
Tipos de Fun¸
c˜
ao de Ativa¸
c˜
ao
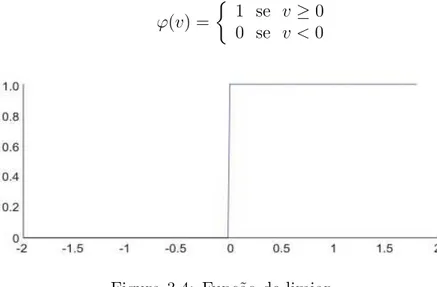
A fun¸c˜ao de ativa¸c˜ao, representada por ϕ(v), define a sa´ıda de um neurˆonio em termos do campo local induzido v. Lista-se a seguir trˆes fun¸c˜oes comumente utilizadas como fun¸c˜ao de ativa¸c˜ao.
ϕ(v) =
1 se v ≥0
0 se v <0 (3.8)
Figura 3.4: Fun¸c˜ao de limiar.
Correspondentemente, a sa´ıda do neurˆoniokque emprega esta fun¸c˜ao de limiar ´e expressa como
yk =
1 se vk ≥0
0 se vk <0
(3.9)
ondevk´e o campo local induzido do neurˆonio como mostrado na equa¸c˜ao 3.4.
Um neurˆonio utilizando esta fun¸c˜ao como sua fun¸c˜ao de ativa¸c˜ao ´e conhecido na literatura como o modelo de McCulloch-Pitts, em reconhecimento ao trabalho pioneiro realizado por McCulloch e Pitts em 1943 [13]. Nesse modelo, a sa´ıda do neurˆonio assume o valor 1, se o campo local induzido daquele neurˆonio ´e n˜ao-negativo, e 0 caso contr´ario. Esta defini¸c˜ao descreve a propriedade tudo-ou-nada do modelo deMcCulloch-Pitts.
2. Fun¸c˜ao Linear por Partes. Para esta fun¸c˜ao, mostrada na Figura 3.5 tem-se
ϕ(v) =
⎧ ⎨ ⎩
1, v ≥+1 2
v, +12 > v >−1
2
0, v ≤ −12
(3.10)
onde assume-se que o fator de amplifica¸c˜ao dentro da regi˜ao linear de opera¸c˜ao ´e a unidade. Esta forma de fun¸c˜ao de ativa¸c˜ao pode ser vista como uma aproxima¸c˜ao de um amplificador n˜ao-linear. As duas situa¸c˜oes seguintes podem se vistas como formas especiais da fun¸c˜ao linear por partes:
• Se a regi˜ao linear de opera¸c˜ao ´e mantida sem entrar em satura¸c˜ao, surge um combinador linear.
• A fun¸c˜ao linear por partes se reduz a fun¸c˜ao de limiar, se o fator de amplifica¸c˜ao da regi˜ao ´e feito infinitamente grande.
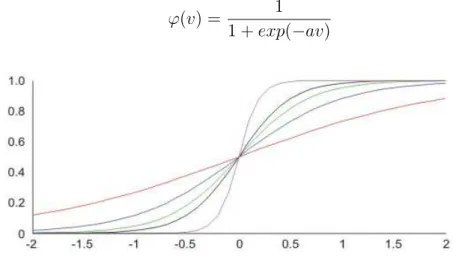
3. Fun¸c˜ao Sigm´oide. A fun¸c˜ao sigm´oide, cujo gr´afico, em forma de “S” ´e ilustrado na Figura 3.6, ´e a fun¸c˜ao de ativa¸c˜ao mais comum na constru¸c˜ao de redes neurais artificiais. Ela ´e definida como uma fun¸c˜ao estritamente crescente que exibe um balanceamento adequado entre comportamento linear e n˜ao-linear. Um exemplo de fun¸c˜ao sigm´oide ´e a fun¸c˜ao log´ıstica, definida por
ϕ(v) = 1
1 +exp(−av) (3.11)
Figura 3.6: Fun¸c˜ao sigm´oide com parˆametro de inclina¸c˜ao vari´avel.
fun¸c˜ao sigm´oide assume um intervalo cont´ınuo de valores entre 0 e 1. Nota-se tamb´em que a fun¸c˜ao sigm´oide ´e infinitamente diferenci´avel, enquanto que a fun¸c˜ao de limiar n˜ao ´e.
As fun¸c˜oes de ativa¸c˜ao definidas at´e agora se estendem de 0 a +1. Por´em, algumas vezes ´e desej´avel que a fun¸c˜ao de ativa¸c˜ao se estenda de -1 a +1, assumindo neste caso uma forma anti-sim´etrica em rela¸c˜ao a origem; isto ´e, a fun¸c˜ao de ativa¸c˜ao ´e uma fun¸c˜ao ´ımpar do campo local induzido. Especificamente, a fun¸c˜ao de limiar, seria agora definida como
ϕ(v) =
⎧ ⎨ ⎩
1 se v >0 0 se v = 0
−1 se v <0
(3.12)
a qual ´e normalmente denominada fun¸c˜ao sinal.
Para a forma correspondente de uma fun¸c˜ao sigm´oide pode-se utilizar a fun¸c˜ao tangente hiperb´olica, definida por
ϕ(v) = tanh(v) (3.13)
Essa altera¸c˜ao, permitindo-se que a fun¸c˜ao de ativa¸c˜ao do tipo sigm´oide assuma valores negativos traz benef´ıcios, como melhora na convergˆencia do algoritmo de treinamento [13].
3.3
Arquiteturas de Redes Neurais
A maneira pela qual os neurˆonios de uma rede neural est˜ao estruturados est´a intimamente ligada com o algoritmo de aprendizagem usado para treinar a rede. O presente trabalho n˜ao se aprofundar´a nos tipos de treinamentos existentes, para tal, consultar referˆencias [13].
3.3.1
Redes Alimentadas Adiante com Camada ´
Unica
Essa arquitetura ´e um caso particular das redes neurais organizadas em v´arias camadas, onde ´e composta pela camada de entrada de dados, seguida de uma ´unica camada de processamento, que calculam e fornecem as sa´ıdas. A Figura 3.7 ilustra uma rede neural de camada ´unica para o caso de quatro n´os na camada de entrada. Esta rede ´e chamada “rede de camada ´unica” referente a apenas uma camada de neurˆonios de processamento. A nomenclatura n˜ao considera a camada de entrada pois ela n˜ao realiza nenhuma computa¸c˜ao.
Figura 3.7: Rede alimentada adiante com apenas uma camada de neurˆonios.
3.3.2
Redes
Alimentadas
Diretamente
com
M´
ultiplas
Camadas
a sa´ıda da rede de uma maneira ´util. Adicionando-se uma ou mais camadas ocultas, torna-se a rede capaz de extrair estat´ısticas de ordem elevada. Em um sentido bastante livre, a rede adquire uma perspectiva global, apesar de sua conectividade local, devido ao conjunto extra de conex˜oes sin´apticas e da dimens˜ao extra de intera¸c˜oes neurais. A habilidade de os neurˆonios ocultos extra´ırem estat´ısticas de ordem elevada ´e particularmente valiosa quando o tamanho da camada de entrada ´e grande.
Nessa arquitetura, os n´os de fonte da camada de entrada da rede fornecem os sinais de entrada aos neurˆonios (n´os computacionais) da primeira camada oculta. Onde, por sua vez, suas sa´ıdas ser˜ao usadas como entradas dos neurˆonios da pr´oxima camada, e assim por diante para o resto da rede. O conjunto de sinais de sa´ıda dos neurˆonios da ´ultima camada constituem a resposta global da rede. A Figura 3.8 mostra o esquema de uma rede neural com uma camada oculta. Esta rede pode ser definida como uma rede 4-4-2 pois apresenta quatro n´os de entrada, quatro neurˆonios na primeira camada de processamento e dois na camada de sa´ıda.
A rede neural descrita na Figura 3.8 ´e dita totalmente conectada, pelo fato de que cada n´o de uma camada est´a ligado a todos os n´os da camada seguinte. De forma an´aloga, se alguma conex˜ao sin´aptica estiver faltando na rede, diz-se que a rede ´e parcialmente conectada.
3.3.3
Redes Recorrentes
Essa arquitetura de redes neurais se distingue da mostrada anteriormente por ter pelo menos uma la¸co de realimenta¸c˜ao.
A presen¸ca de la¸cos de realimenta¸c˜ao, tem um impacto profundo na capacidade de aprendizagem da rede e no seu desempenho. Al´em disso, os la¸cos de realimenta¸c˜ao envolvem o uso de ramos particulares compostos de elementos de atraso unit´ario, o que resulta em um comportamento dinˆamico n˜ao-linear, admitindo-se que a rede neural contenha unidades n˜ao-lineares. Essa rede ´e ilustrada na Figura 3.9.
Figura 3.9: Rede recorrente sem neurˆonios ocultos.
3.4
Processos de Aprendizagem
As primeiras se caracterizam pela presen¸ca de um “professor”, que tem conhecimento sobre o ambiente. O conhecimento se encontra na forma de conjuntos de exemplos de entrada-sa´ıda e ´e atrav´es deles que a rede consegue aprender. O processo de aprendizagem ´e realizado atrav´es da altera¸c˜ao dos pesos sin´apticos, o que proporciona a diminui¸c˜ao do erro na sa´ıda.
Na aprendizagem n˜ao supervisionada, n˜ao existe um “professor” para acompanhar o processo, o que significa que n˜ao h´a exemplos rotulados do ambiente a serem aprendidos pela rede. Para mais detalhes sobre este tipo de aprendizagem, consultar referˆencias [13].
Dentre os v´arios algoritmos de treinamento supervisionado existentes na literatura [16] o algoritmo back propagation, ou, retropropaga¸c˜ao do erro, ´e o mais utilizado para treinar redes perceptrons de m´ultiplas camadas, que ´e a arquitetura de redes neurais implementada neste trabalho.
O procedimento da retropropaga¸c˜ao do erro envolve duas fases. A primeira, ocorre quando as entradas s˜ao apresentadas `a rede e propagadas adiante at´e que seja computado um valor de sa´ıda. Esse valor ´e comparado com a sa´ıda desejada, e ent˜ao ´e calculada a diferen¸ca entre esses dois valores, ou, o erro.
Redes Neurais no Ambiente
Foundation Fieldbus
De acordo com a fundamenta¸c˜ao te´orica apresentada at´e o presente momento e com os objetivos descritos na Se¸c˜ao 1.1.5, a proposta a ser detalhada neste cap´ıtulo ´e de se implementar as redes neurais artificiais, apresentadas no Cap´ıtulo 3, em ambientes de redes de campo FF (Foundation Fieldbus) fazendo uso apenas de blocos funcionais padronizados pelaFieldbus Foundation.
Essa solu¸c˜ao surgiu da dificuldade de implementa¸c˜ao de um bloco funcional com a capacidade de executar algoritmos de redes neurais, que era a solu¸c˜ao inicial assumida pelo Projeto REDE 10/06 [18]. Dificuldade esta, diretamente ligada aos ambientes de desenvolvimento e testes que envolvem custos bastante elevados, chegando a ser proibitivos.
A solu¸c˜ao aqui abordada, apresenta vantagens no que diz respeito `a interoperabilidade, que, como j´a mencionado, ´e uma das caracter´ısticas que impulsionam o sucesso das redes de campo, al´em de ser econˆomico no ponto de vista do desenvolvimento.
4.1
Detalhamento T´
ecnico
Para a constru¸c˜ao de uma rede neural artificial, s˜ao necess´arios v´arios neurˆonios artificiais interligados, formando a arquitetura desejada (a arquitetura implementada neste trabalho ´e a perceptron de m´ultiplas camadas, mostrada na Se¸c˜ao 3.3.2).
Dentre os blocos funcionais (FF) padronizados, os mais importantes para a implementa¸c˜ao da ferramenta em quest˜ao, s˜ao os blocos aritm´etico e caracterizador, que s˜ao diretamente utilizados no projeto de um neurˆonio artificial.
Atrav´es da configura¸c˜ao e interliga¸c˜ao desses dois blocos funcionais, pode-se obter um modelo de neurˆonio pr´oximo ao mostrado na Se¸c˜ao 3.3. As diferen¸cas ficam por conta da fun¸c˜ao de ativa¸c˜ao, como ser´a mostrado mais adiante.
O bloco funcional aritm´etico est´a ilustrado na Figura 4.1 [12]. Pode-se observar no seu esquema geral, a presen¸ca de trˆes entradas, rotuladas de IN 1, IN 2 e IN 3, de trˆes ganhos correspondentes `as entradas, denominados GAIN IN 1, GAIN IN 2 e GAIN IN 3. Al´em disso, existe tamb´em um sub bloco rotulado de “Algorithm Type”. O sub bloco Algorithm Type pode assumir diversos comportamentos, executando v´arias fun¸c˜oes matem´aticas, bastando para isso que se escolha um dentre os v´arios algoritmos a seguir [12]:
Figura 4.1: Esquema interno do bloco aritm´etico padr˜ao FF.
• Compensa¸c˜ao de Fluxo, linear;
• Compensa¸c˜ao de Fluxo, ra´ız quadrada;
• Compensa¸c˜ao de Fluxo, aproxima¸c˜ao;
• Fluxo BTU;
• Multiplicador/Divisor Tradicional;
• M´edia;
• Somador Tradicional;
Esse bloco ´e utilizado para calcular o campo local induzido do neurˆonio a partir de suas entradas (Equa¸c˜ao 3.4). Esse valor ´e calculado aplicando-se um peso para cada entrada do neurˆonio (o bloco funcional provˆe esses pesos como parˆametros), e depois somando-os com um valor adicional, chamado debias, tamb´em dispon´ıvel no bloco funcional como parˆametro. Para isso, escolheu-se entre as v´arias fun¸c˜oes do sub blocoalgorithm type, o algoritmo somador tradicional.
Depois de calculado o campo local induzido, para que seja poss´ıvel implementar um neurˆonio artificial (com at´e trˆes entradas), falta apenas a fun¸c˜ao de ativa¸c˜ao, que ser´a implementada usando-se o bloco funcional padr˜ao chamado de “Caracterizador de Sinais”.
O bloco caracterizador ´e mostrado na Figura 4.2 e tem a fun¸c˜ao de fazer uma mapeamento entre uma entrada e sua respectiva sa´ıda. Esta fun¸c˜ao, ´e definida a partir de uma tabela com no m´aximo 21 pontos (x-y), onde os pontos intermedi´arios s˜ao obtidos a partir de uma interpola¸c˜ao linear executada pelo bloco funcional [11].
Figura 4.2: Esquema interno do bloco caracterizador de sinais padr˜ao FF.
Ligando-se a sa´ıda de um bloco aritm´etico, configurado como descrito acima, `a entrada de um bloco caracterizador implementando uma fun¸c˜ao de ativa¸c˜ao (ver Se¸c˜ao 3.2.1), tem-se um neurˆonio artificial, como mostrado na Figura 3.3. Pode-se, ent˜ao, formar uma rede neural artificial interligando-se a sa´ıda desse neurˆonio, `as entradas de outros neurˆonios e organiz´a-los de maneira desejada (ver Sess˜ao 3.3).
Atrav´es da escolha dos pontos dispon´ıveis no bloco caracterizador, objetivou-se mapear a fun¸c˜ao tangente sigm´oide, mostrada na Figura 4.3.
Figura 4.3: Fun¸c˜ao tangente sigm´oide, usada como fun¸c˜ao de ativa¸c˜ao.
Com o uso de apenas um bloco caracterizador, tem-se dispon´ıvel apenas vinte pontos1 para fazer o mapeamento entre a entrada e a sa´ıda (Figura 4.2). A qualidade
dessa aproxima¸c˜ao ´e inversamente proporcional ao erro gerado pelo neurˆonio, o que torna de extrema importˆancia conseguir a melhor aproxima¸c˜ao poss´ıvel.
Para a melhor sintonia dos pontos, usou-se uma t´ecnica de inteligˆencia computacional chamada de algoritmos gen´eticos [19]. Para isso, foi definida uma fun¸c˜ao de avalia¸c˜ao, afim de mensurar a qualidade da aproxima¸c˜ao. A fun¸c˜ao definida foi o erro m´edio quadr´atico entre a fun¸c˜ao original e a fun¸c˜ao a ser aproximada. O objetivo da t´ecnica utilizada ´e achar a combina¸c˜ao de pontos que minimiza a fun¸c˜ao de avalia¸c˜ao, mostrada a seguir:
A=
m
i=1
f rac(ai−ri)2m (4.1)
Onde m ´e o n´umero total de pontos do vetor, a ´e a fun¸c˜ao aproximada e r ´e a fun¸c˜ao real. Os melhores pontos, de acordo com o algoritmo, s˜ao mostrados na
1O bloco caracterizador utilizado foi o da empresa SMAR que disponibiliza 20 pontos ao inv´es
Figura 4.4. O erro m´edio quadr´atico dessa aproxima¸c˜ao para um vetor de tamanho
m= 201 pontos foi de
erro= 6,4518×10−6
Como esperado, as regi˜oes onde a fun¸c˜ao apresenta maior curvatura tˆem a maior concentra¸c˜ao de pontos (Figura 4.5).
Figura 4.4: Pontos fornecidos pelo algoritmo gen´etico.
Na Figura 4.5, os pontos s˜ao ligados atrav´es de uma interpola¸c˜ao linear, formando a fun¸c˜ao aproximada.
Na Figura 4.6, al´em dos pontos, est˜ao as duas fun¸c˜oes sobrepostas, a aproxima¸c˜ao e a original, afim de se visualizar a qualidade da aproxima¸c˜ao.
Figura 4.5: Aproxima¸c˜ao da fun¸c˜ao tangente sigm´oide.

![Tabela 2.1: Tamanho m´aximo dos ramos H1[4]. N´ umero de dispositivos 1 dispositivopor ramo 2 dispositivospor ramo 3 dispositivospor ramo 4 dispositivospor ramo 25-32 1 m 1 m 1 m 1 m 19-24 30 m 1 m 1 m 1 m 15-18 60 m 30 m 1 m 1 m 13-14 90 m 60 m 30 m 1 m 1](https://thumb-eu.123doks.com/thumbv2/123dok_br/15555503.97572/23.892.129.760.936.1108/tabela-tamanho-aximo-dispositivos-dispositivopor-dispositivospor-dispositivospor-dispositivospor.webp)
![Figura 2.7: Transmiss˜ao s´ıncrona e comunica¸c˜ao ass´ıncrona[4]. • No tempo 140, todo o ciclo ´e repetido.](https://thumb-eu.123doks.com/thumbv2/123dok_br/15555503.97572/29.892.220.670.190.588/figura-transmiss-ıncrona-comunica-ıncrona-tempo-ciclo-repetido.webp)
![Figura 2.10: Divis˜ao do dispositivo de campo em blocos[4]. Tabela 2.4: Blocos funcionais t´ıpicos.](https://thumb-eu.123doks.com/thumbv2/123dok_br/15555503.97572/33.892.224.665.192.479/figura-divis-dispositivo-blocos-tabela-blocos-funcionais-ıpicos.webp)