CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E DA COMPUTAÇÃO
Obtenção dos Parâmetros-X de Estruturas
Planares
Pedro Ivo de Araujo do Nascimento
Orientador: Prof. Dr. Antonio Luiz Pereira de Siqueira Campos
Dissertação de Mestrado apresentada ao Programa
de Pós-Graduação em Engenharia Elétrica e da Computação (área de concentração: Telecomunicações) como parte dos requisitos para obtenção do título de Mestre em Ciências.
Obtenção dos Parâmetros-X de Estruturas Planares
Pedro Ivo de Araujo do Nascimento
Dissertação de mestrado aprovada em 11 de dezembro de 2012 pela banca examinadora composta pelos seguintes membros:
________________________________________
Prof. Dr. Antonio Luiz Pereira de Siqueira Campos - OrientadorUniversidade Federal do Rio Grande do Norte
____________________________________________
Prof. Dr. Luiz Felipe de Queiroz Silveira Universidade Federal do Rio Grande do Norte
____________________________________________
Prof. Dr. Ronaldo de Andrade Martins Universidade Federal do Rio Grande do Norte
____________________________________________
Prof. Dr. Jefferson Costa e Silva
Instituto Federal de Educação, Ciência e Tecnologia da Paraíba
Natal - RN
Agradecimentos
Agradeço primeiramente a minha família pela grande paciência, apoio e carinho durante
todo este longo processo. Em especial aos meus pais Pedro e Ivanete pela compreensão
durante a jornada, aos meus irmãos Analuiza e Gustavo por sempre estarem por perto e
ajudando quando precisei. E a meu Tio Dorian por sempre prestativo.
Agradeço imensamente a Rosy por sempre estar do meu lado, desde o primeiro dia no
mestrado, me segurando nos momentos mais complicados e difíceis, por ter me dado força e
apoio para que voltasse para o mestrado depois dos problemas que tive.
Ao professor Antônio Luiz pela oportunidade dada, pela ótima orientação que recebi durante
este mestrado, pelo aprendizado e pelas palavras de encorajamento e por toda a paciência
que teve comigo.
A todos os professores do departamento de engenharia elétrica, extremamente importantes
durante a minha formação. Como também ao professor Fernando Rangel por ter me
auxiliado na iniciação à área acadêmica e de pesquisa, mostrando pontos de vistas que antes
passavam despercebidos.
Aos companheiros de mestrado e de PotyChip, Adauto, Haulisson e Brito, que me ajudaram
demais na minha formação
Aos colegas de IFRN do campus Mossoró, Haulisson, Luiz Ricardo, Leopoldo, Jonh, André,
Giovane, Wagner, Priscylla, Emerson, Darcia e tantos outros que ajudaram durante a minha
passagem pelo campus.
Aos colegas de IFRN do campus Natal Zona Norte por todo o apoio nestes últimos tempos
minha situação e permitiram algumas facilidades para a que fosse possível à conclusão deste
mestrado.
Aos meus alunos atuais e passados, que me mostraram a beleza da docência e me fizeram
seguir esta carreira com tanto orgulho.
A Ivanilson e Evantuy amigos de todas as horas e momentos que precisei.
Aos meus amigos de tempos de Cefet que me ajudaram demais quando precisava fugir um
tanto da realidade. Em especial a Lorena por sempre está disponível, mesmo que distante,
pra me escutar.
Resumo
O grande desenvolvimento dos sistemas de comunicação nas últimas décadas trouxe
a necessidade de uma caracterização cada vez mais precisa dos componentes utilizados. A
modelagem por meio de parâmetros-S é utilizada para caracterização, simulação e testes de
sistemas de comunicação desde meados dos anos 60. Contudo a limitação dos parâmetros-S
para sistemas lineares fez crescer a necessidade por novos tipos de parametrizações que
incluam as características de sistemas não lineares.
A modelagem por distorção poli-harmônica é uma técnica de caracterização aplicada
a sistemas não lineares que vem ganhando espaço na literatura por sua praticidade e
semelhança conceitual com os parâmetros-S.
Este trabalho apresentará uma análise da modelagem por distorção harmônica, o
desenvolvimento de um banco de testes para simulação de estruturas planares e a
caracterização destas estruturas por meio de parâmetros-X. Com isso pretende-se analisar a
utilização, precisão e eficiência da modelagem por distorção poli-harmônica para estruturas
planares.
Palavras chaves: Modelagem por distorção poli-hamônica, Parâmetro-X, Banco de Testes,
Abstract
Due to major progress of communication system in the last decades, need for more
precise characterization of used components. The S-parameters modeling has been used to
characterization, simulation and test of communication system. However, limitation of
S-parameters to model nonlinear system has created new modeling systems that include the
nonlinear characteristics.
The polyharmonic distortion modeling is a characterizationg technique for nonlinear
systems that has been growing up due to praticity and similarity with S-parameters.
This work presents analysis the polyharmonic distortion modeling, the test bench
development for simulation of planar structure and planar structure characterization with
X-parameters.
Keywords: Polyharmonic distortion modeling, X-parameters, Test-Bench, planar structures,
Sumário
1 Introdução ... 16
2 Modelagem por distorção poli-harmônia ... 20
2.1 Introdução ... 20
2.1 Aspectos Básicos ... 21
2.2 Análise matemática dos parâmetros-X ... 22
2.3 Interpretação Intuitiva ... 28
2.4 Aplicações e Limitações práticas da modelagem PHD ... 29
2.4.1 Aplicações ... 30
2.4.2 Limitações ... 30
3 Banco de testes para simulação de parâmetros-X ... 33
3.1 Introdução ... 33
3.2 Caracterização do Dispositivo por meio de Parâmetros-S ... 33
3.3 Obtenção dos Parâmetros-X ... 35
3.4 Obtenção dos Parâmetros-S a partir do Modelo Caracterizado do DUT por meio de Parâmetros-X ... 37
3.5 Banco de Testes Completo ... 38
3.6 Banco de testes adaptado a estruturas planares de geometria diferenciada ... 39
4 Simulação de Parâmetros-X para estruturas planares ... 43
4.1 Introdução ... 43
4.2 Linha de Micro-Fita ... 43
4.2.1 Simulação de parâmetros-S ... 44
4.2.2 Caracterização da linha por parâmetros-X ... 44
4.3 Filtro passa-faixa ... 46
4.3.2 Caracterização do filtro passa-faixa por parâmetros-X ... 47
4.4 Filtro Passa-Faixa UWB ... 48
4.4.1 Simulação dos Parâmetros-S ... 49
4.4.2 Caracterização do Filtro Passa-faixa com banda ultra-larga por meio de Parâmetros-X ... 49
4.5 Antena Patch de 2.4 GHz ... 50
4.5.1 Simulação de Parâmetros-S ... 51
4.5.2 Caracterização da antena por parâmetros-X ... 53
4.6 Antenas de Microfita com patch Quase-Fractal usando a curva de Minkowski54 4.6.1 Simulação dos Parâmetros-S ... 55
4.6.2 Caracterização das antenas quase-fractais por meio de parâmetros-X ... 56
4.6.3 Análise do fator de compressão aplicado nas antenas de nível 1 e nível 2 .. 58
4.7 Análise dos Resultados ... 60
5 Conclusões ... 62
Lista de Figuras
Figura 2.1:Diagrama básico da caracterização por parâmetros-S ... 22
Figura 2.2: O conceito de funções descritivas ... 23
Figura 2.3: O princípio da superposição harmônica – baseado em (ROOT, 2010) e (VERSPECHT e ROOT, 2006) ... 26
Figura 2.4: Amplitude de e em relação a , retirado de (VERSPECHT e ROOT, 2006) ... 27
Figura 3.1: Simulação de parâmetros-S ... 34
Figura 3.2: Parâmetros de um filtro passa-baixa ... 35
Figura 3.3: Obtenção de Parâmetros-X ... 36
Figura 3.4: Parâmetro de um filtro passa-baixa ... 37
Figura 3.5: Simulação de Parâmetros S a partir da caracterização por meio de parâmetros-X ... 38
Figura 3.6: Fluxograma do banco de testes ... 39
Figura 3.7: Editor de Substrato do Momentum ... 40
Figura 3.8:Banco de testes modificado ... 41
Figura 4.1: Linha de microfita. ... 43
Figura 4.2: Parâmetro para a linha de micro-fita calculada ... 44
Figura 4.3: Magnitude e Fase do parâmetro para a linha de micro-fita ... 45
Figura 4.4: Parâmetros e para a linha de microfita... 46
Figura 4.5: Filtro Passa-faixa de um estágio ... 46
Figura 4.6: Simulação dos parâmetros e ... 47
Figura 4.7: Simulação de parâmetros-X aplicado a um filtro passa-faixa – Parâmetros e ... 48
Figura 4.8:Layout do Filtro banda larga (RAZALLI, ISMAIL, et al., 2007) ... 48
Figura 4.9: Parâmetros e do Filtro Banda Larga ... 49
Figura 4.10: Parâmetros e do Filtro Banda Larga ... 50
Figura 4.11: Antena patch 2,4 GHz ... 51
Figura 4.13: Componente Extraído do Momentum e utilizado no esquemático ... 52
Figura 4.14: Parâmetro da Antena Patch ... 53
Figura 4.15: Diferentes níveis da curva de Minkowski ... 54
Figura 4.16: Antenas Quase-Fractal propostas(medidas em mm) (OLIVEIRA, SILVA, et al.,
2010) ... 55
Figura 4.17: Perdas de Retorno simuladas para as antenas quase-fractais A0, M1 e M2 com
100% das suas dimensões físicas ... 56
Figura 4.18: Simulação do parâmetro para as antenas quase-fractais A0,M1 e M2
com 100% das suas dimensões físicas ... 57
Figura 4.19: Perda de Retorno para as antenas redimensionadas para 2,45 GHz ... 59
Figura 4.20: Parâmetro (linhas contínuas) em comparação a perda de retorno medida
Capítulo 1
Introdução
O crescente avanço tecnológico na construção de dispositivos com tecnologia planar
veio da grande necessidade da implementação de dispositivos com dimensões reduzidas
para as mais diversas aplicações.
Para o projeto e desenvolvimento destes dispositivos é necessária uma caracterização
precisa e confiável dos parâmetros de seus componentes internos.
A modelagem por meio de parâmetros-S é utilizada para caracterização e testes,
desde meados dos anos 1960. Os parâmetros-S é, provavelmente, o tipo de modelagem
comportamental mais utilizada e difundida na atualidade.
A importação dos parâmetros-S para o desenvolvimento de sistemas de comunicação
se dá por várias razões. Por um lado são fáceis de medir. Um analisador de rede vetorial
padrão fornece, facilmente os parâmetros dos componentes. Os parâmetros obtidos são
relevantes pois, representam a caracterização do dispositivo sob teste(Dispositive Under
Test - DUT) e está caracterização é independente do sistema de medição utilizado para
fornecer estes parâmetros, podendo com isso utiliza-los em qualquer sistema de medição ou
modelagem. Em sistemas de duas portas, por exemplo, os parâmetros-S são definidos por
relações, que produzem resultados independentes do detalhamento do sinal de estímulo.
Com isso, outra vantagem destacável é que os parâmetros-S deu um determina DUT são
invariantes em relação ao tipo de onda incidente.
Mesmo com a grande gama de utilização, os parâmetros-S, ditos convencionais, são
limitados. Os parâmetros-S são definidos para sistemas lineares, ou para sistemas com
comportamento linear dentro de uma determinada faixa de trabalho. Contudo todos os
sistemas são não lineares, gerando distorções harmônicas, intermodulações causando
degradação espectral. Em teoria os parâmetros-S não são aplicáveis para sistemas não
lineares.
A introdução dos parâmetros-X (VERSPECHT e ROOT, 2006), trouxe novas
possibilidade para os projetos de sistemas eletrônicos e de telecomunicação, com a
modelagem por distorção poli-harmônica (PolyHarmonic Distortion Modeling – PHD).
na teoria dos parâmetros de dispersão e por isso é considerado uma evolução desses. Na
modelagem PHD a relação entre ondas incidentes e dispersas não é descrita somente por
meio de relações entre as portas, mas sim pela relação entre harmônicas.
O princípio da distorção poli-harmônica vem sendo desenvolvido e atualizado para
amenizar suas limitações nas duas últimas décadas (VERSPECHT, 1995), (VERSPECHT e
ESCH, 1998), (VERSPECHT, WILLIAMS, et al., 2005), (VERSPECHT e ROOT, 2006),
(VERSPECHT, HORN, et al., 2009), (VERSPECHT, HORN e ROOT, 2010). Suas
principais aplicações se baseiam em sistemas ativos não lineares como amplificadores e
mixers (BOAVENTURA, A.J.S. e CARVALHO, N.B., 2011), (HORN, VERSPECHT, J, et
al., 2008), (NIELSEN, GILLEASE, C e TORRES, V., 2012), (WOOD, J e COLLINS, G,
2010), (XIE, TAO ZHANG e DI LIU, 2012), (XIN DONGDONG e LIN MAOLIU, 2011).
O objetivo deste trabalho é analisar a utilização da caracterização de parâmetros-X
para estruturas planares e observar as diferenças encontradas em relação a parametrização
por meio de parâmetros-S. Ao final espera-se determinar se há ou não melhoras substanciais
na utilização de parâmetros-X para estruturas planares.
Neste trabalho foi desenvolvido um banco de testes a ser utilizado por todas as
estruturas planares testadas, como também foram simuladas diversos tipos de estruturas
planares para obter ao final resultados conclusivos sobre esta utilização.
A principal contribuição deste trabalho é a análise de estrutura planares por meio de
parâmetros-X utilizando como meio de simulação a suíte de ferramentas Advanced Design
System (ADS) da Agilent Technologies.
No Capítulo 2, é apresentada uma descrição geral da modelagem por distorção
poli-harmônica, mostrando um breve desenvolvimento matemático, uma interpretação intuitiva
dos parâmetros-X, as aplicações mais comuns e as limitações encontradas para a modelagem
PHD.
O Capítulo 3 apresenta o conceito básico do banco de testes utilizado durante este
trabalho, onde são apresentadas todas as etapas da modelagem, partindo da simulação de
parâmetros-S, a caracterização por parâmetros-X e a análise de erros. Além disto, também é
incluída ao final do capítulo, uma modificação do banco de testes para a utilização deste
A obtenção dos parâmetros-X de estruturas planares são relatadas no Capítulo 4.
Nesse capítulo são apresentadas as estruturas básicas, como também é aplicado o banco de
testes desenvolvido no Capítulo 3. Os resultados são observados e as devidas análise e
comparações em relação à modelagem por parâmetros-S são descritas.
Para finalizar, no Capítulo 5 são apresentadas as conclusões dos principais aspectos
abordados durante este trabalho, propostas e sugestões para trabalhos futuros e a publicação
Capítulo 2
Modelagem por distorção poli-harmônia
2.1
Introdução
A modelagem por distorção poli-harmônica, como também por parâmetros-S, pode
ser considerada uma técnica de modelagem “caixa-preta” no domínio da frequência. Recebem esta denominação, pois não são necessários conhecimentos prévios do dispositivo
em teste. Toda a caracterização é obtida por meio de estímulos externos aplicados às portas
do DUT e pela medição dos sinais de resposta. Este tipo de modelagem realizada no domínio da frequência é adequada para sistemas em alta frequência, tanto no que se refere a
técnicas de medição como de caracterização.
Este tipo de modelagem é, provavelmente, a representação mais fiel do circuito, pois
inclui os efeitos parasitas que não são analisados em outros tipos de simulação. (CEPERIC e
BARIC, 2012) Na área industrial este tipo de modelagem também é atraente, pois permite
de forma clara, a proteção da propriedade intelectual, podendo o projeto pode ser
compartilhado sem a necessidade do detalhamento dos circuitos internos do dispositivo.
Neste caso o desenvolvedor só iria fornecer os parâmetros importantes para o teste a ser
realizado.
Obviamente, a modelagem caixa-preta também possui algumas desvantagens. Entre
elas pode-se citar o fato de que ela só é válida para regiões próximas ao ponto de operação
do dispositivo. Se o dispositivo foi construído para trabalhar em largas faixas de frequência
então, uma larga faixa de sinais é necessária para excitar o dispositivo e como resultado o
tempo de medição ou de simulação pode se tornar longo, resultando em um modelo
complexo e de um maior esforço computacional.
Para sistemas lineares, a modelagem por parâmetros-S fornecer um bom modelo
caixa-preta baseado em medições e no modelo comportamental do componente, (WOOD e
ROOT, 2005) considerando as limitações da faixa de frequência, ruído e outras restrições
dos componentes envolvidos.
Infelizmente, os sistemas não lineares são mais comuns e possuem uma
ser modelados. A principal razão está no fato de que há diversos tipos de sistemas não
lineares com comportamentos dinâmicos complexos (RUTENBAR, GIELEN e
ROYCHOWDHURY, 2007). Métodos de modelagem não linear, geralmente, são altamente
interdisciplinares e envolvem desde a física do componente, matemática até ferramentas de
simulação utilizadas. (CEPERIC e BARIC, 2012)
Para contornar a problemática destes sistemas, foram desenvolvidos vários métodos
de modelagem e caracterização. Um destes é o a modelagem por distorção poli-harmônica,
que pela sua similaridade com os parâmetros-S tornou-se uma ferramenta atrativa para os
desenvolvedores.
Neste trabalho, será feita uma abordagem matemática da modelagem por
parâmetros-X, como também a análise de estruturas utilizando softwares de simulação para
caracterizar estes modelos.
2.1
Aspectos Básicos
O modelo PHD é caracterizado a partir da resposta do dispositivo sob teste,
estimulado por um conjunto de tons discretos relacionados harmonicamente, considerando o
tom fundamental como dominante e as harmônicas relativamente pequenas. E a resposta aos
estímulos é analisada não somente entre a relação dos tons fundamentais mas também, pela
relação entre fundamentais e harmônicas e a relação entre as harmônicas.
A ideia básica é que a modelagem PHD pode ser utilizada como uma extensão
natural dos parâmetros-S para condições que envolvem grandes sinais, além da análise das
respostas relacionadas às harmônicas, ou seja, o efeito de não linearidade dos dispositivos.
Ao se conectar o DUT a um analisador de espectro para grandes sinais (LSNA -
Large-Signal Network Analyzer) o modelo é extraído e pode-se descrever todos os tipos de
comportamento não linear, como a amplitude e fase das harmônicas. O modelo PHD
também pode ser utilizado em projetos desenvolvidos em ferramentas computacionais e
descrever as mesmas características de não linearidade. Este tipo de caracterização não pode
ser feita utilizando parâmetros-S, pois a modelagem é incompleta em relação aos efeitos de
não linearidade. Uma característica interessante é que o modelo PHD pode ser reduzido a
2.2
Análise matemática dos parâmetros-X
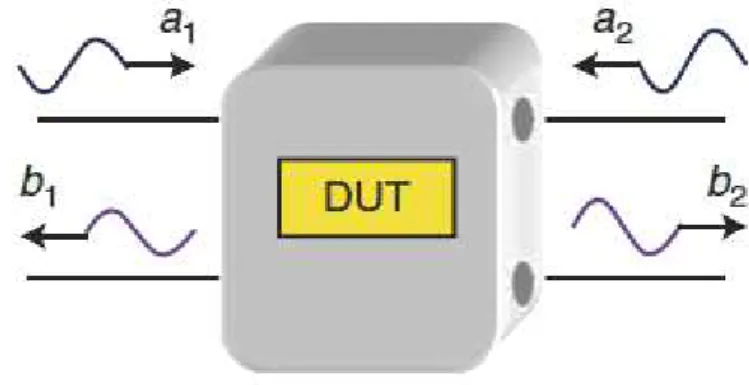
Na caracterização por meio de parâmetros-S, as ondas incidentes e refletidas são
medidas em cada uma das portas. Na Figura 2.1 é mostrado o diagrama básico dos
parâmetros-S, onde são as ondas incidentes e são as ondas refletidas.
Figura 2.1:Diagrama básico da caracterização por parâmetros-S
As equações dos parâmetros-S definem que as ondas refletidas em cada porta são
compostas pela combinação linear de todas as ondas incidentes no dispositivo. Para duas
portas:
(2-1)
Para a medição de cada um dos parâmetros-S de cada porta é necessário que não
exista uma onda incidente na porta não utilizada.
|
| | |
(2-2)
Estas medições são feitas por um analisador de rede vetorial (VNA – Vector Network Analyzer) excitando as portas do DUT e realizando as medições da magnitude e
fase das portas apropriadas.
Para um dispositivo com N portas, a expressão geral para a onda de saída na porta x em termos dos parâmetros-S é dada por:
∑
(2-3)
Seguindo o equacionamento dos parâmetros-S, para análise dos parâmetros-X, a
unidade básica de trabalho são as ondas de tensão que passam pelo sistema. As ondas são
porta , considerando que a corrente será positiva se estiver entrando no dispositivo. As
ondas incidentes A e as ondas refletidas B são definidas a seguir:
(2-4)
(2-5)
Onde é a impedância característica, padronizada em 50 Ω.
Durante este trabalho as relações não lineares entre as ondas serão analisadas. Isto é
o que diferencia, basicamente, os parâmetros-X dos parâmetros-S que, descrevem somente
relações lineares. O modelo PHD assume a presença de tons de sinais discretos (multi-tons)
nas ondas incidentes e nas ondas refletidas. Durante a análise só serão considerados, o tom
fundamental e suas harmônicas (VERSPECHT, WILLIAMS, et al., 2005). Neste caso, cada
frequência portadora será descrita por meio do índice de harmônicas, sendo o índice 0 para
contribuição DC, 1 para o tom fundamental e 2 para a segunda harmônica. Na notação
utilizada para indicar as variáveis da onda, o primeiro índice refere-se a porta e o segundo
refere-se ao índice da harmônica. Por exemplo, a notação , refere-se à segunda
harmônica do sinal de entrada A na porta 1.
A relação entre os sinais é com feita a partir da função que correlaciona todos
os componentes espectrais relevantes na entrada com os componentes espectrais de
saída . Nesta notação, e e g representam a porta relativa ao sinal analisado e m e n
representam o índice do harmônico do sinal.
(2-6) Para a Eq. (2-6) foi assumido que a frequência fundamental é uma constante
conhecida. As funções são chamadas de funções descritivas (PEYTON e BILLINGS,
1991) e o seu conceito é ilustrado na Figura 2.2.
Diferentemente do que ocorre nos parâmetros-S, a Figura 2.2 ilustra que as funções
descritivas são utilizadas para descrever que a relação entre as ondas incidentes e refletivas
leva em consideração não somente o tom fundamental, mas também as harmônicas
envolvidas e a correlação entre elas.
A Eq. (2-6) é uma estrutura matemática muito generalista, utilizada por
praticamente todos os modelos desenvolvidos no domínio da frequência. O modelo PHD é
uma aproximação particular da Eq. (2-6), que envolve a linearização da equação em torno
de um tom fundamental. Para ser possível esta aproximação, foi necessário o
desenvolvimento de determinadas propriedades. Estas propriedades, que tornaram possível o
desenvolvimento da modelagem PHD, estão descritas em (VERSPECHT, 1995).
A primeira propriedade considera que a função dever ser invariante no tempo.
Isto implica que se for aplicado um atraso nos sinais de entrada (ondas incidentes), sempre
resultará num atraso exatamente igual nos sinais de saídas (ondas refletidas). No domínio da
frequência, a aplicação de um atraso é equivalente à aplicação de um deslocamento de fase,
podendo ser representado matematicamente por:
(2-7)
Considerando que a Eq. (2-7) é válida para todos os valores de θ, então para auxiliar
a simplificação considera-se que o atraso θ deverá ser a igual à fase de invertida, então
(2-8)
Este valor foi escolhido por ser a componente dominante no sinal de entrada. Para a
notação daqui em diante será introduzido o fasor P, definido como:
(2-9)
Substituindo por na Eq. (2-7) resulta em
(2-10)
Como representa a fase invertida do sinal (representado na forma polar),
então ao se multiplicar o sinal pela sua fase invertida resulta no módulo do sinal, portanto
| | (2-11)
A vantagem da Eq. (2-11), quando comparado a Eq. (2-6) é que o primeiro
argumento de entrada, ou seja, a amplitude da componente fundamental da entrada na porta
1, será sempre positiva, diferentemente do que ocorre na Eq. (2-6), onde a componente
fundamental é uma componente complexa, facilitando assim a análise matemática do
modelo.
Geralmente, os sistemas analisados devem funcionar em condições de grandes
sinais e nestas condições o princípio da superposição não é válido. Mas na maioria dos casos
de sistemas que trabalham em grandes sinais só há um sinal dominante presente ( ),
enquanto todos os outros componentes das entradas (harmônicas) são relativamente
pequenos. Levando em conta esta característica, pode-se utilizar o princípio da
superposição. Esta é a segunda propriedade utilizada, conhecida como o princípio da
superposição harmônica (VERSPECHT e ESCH, 1998).
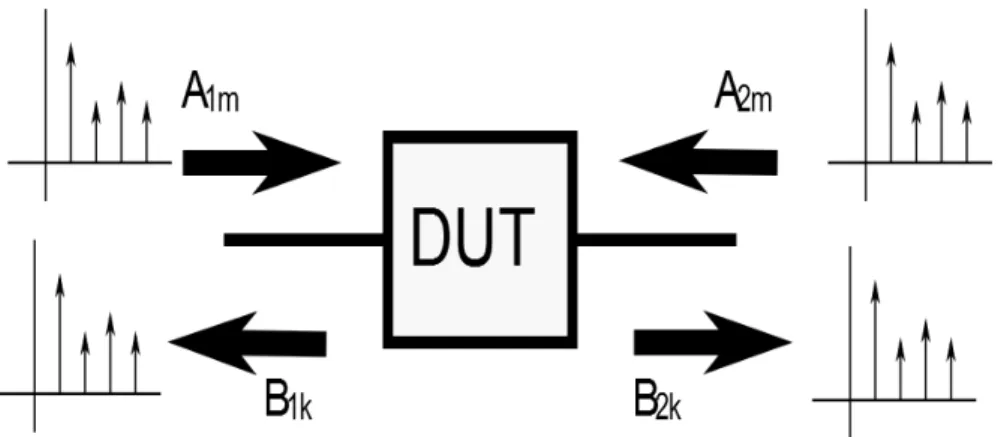
A Figura 2.3 ilustra graficamente o princípio da superposição harmônica. Para
simplificar a análise do gráfico é considerada, somente, a presença de e . Também é
considerado que o tom fundamental é diferente de zero. Todos estes componentes são
representados pelas setas pretas, tanto na entrada como na saída. Mas ao analisar a
componente (seta vermelha, referente à segunda harmônica na entrada), este sinal
resultará em um desvio no espectro da saída , indicado pela seta vermelha. O mesmo
princípio ocorre para as outras harmônicas. O principio da superposição harmônica é válido
enquanto os desvios totais do espectro da saída forem iguais à superposição de todos os
desvios individuais. Este princípio foi comprovado por meio de testes experimentais
utilizando amplificadores de potência como estrutura básica e foi válido para todas as
Figura 2.3: O princípio da superposição harmônica – baseado em (ROOT, 2010) e (VERSPECHT e ROOT, 2006)
O principio da superposição harmônica é o ponto base do modelo PHD.
Linearizando a Eq. (2-11) em relação ao sinal de entrada obtém-se
| | ∑ | |
∑ | |
(2-12)
Onde | | é a parcela constante relacionada a primeira harmônica
| | , é a parte real e | | é a parte imaginária da função .
As partes real e imaginária dos argumentos de entrada são tratadas separadamente.
Isso ocorre porque o mapeamento espectral da função é não-analítica, devido a não
lineariedade da função. Se observarmos os parâmetros-S clássicos, onde consideramos como
sendo um modelo comportamental de sistemas lineares, seu mapeamento espectral resulta
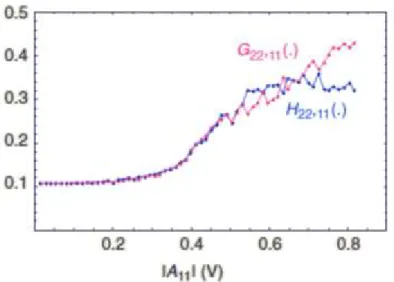
em uma função analítica. Na Figura 2.4 é descrita a medição da amplitude de e de
em função de | | para um amplificador de RF. Enquanto | | é pequeno, o
modelo de parâmetros-S é válido e as amplitudes de e são idênticas,
indicando que o mapeamento espectral é analítico. Mas, a partir do momento que o | | é
considerado um grande sinal, e começam a se comportar de maneiras
Figura 2.4: Amplitude de e em relação a | |, retirado de (VERSPECHT e ROOT, 2006)
As equações do modelo PHD são derivadas da substituição das partes real e
imaginária dos argumentos de entrada na Eq. (2-12), pela combinação linear dos argumentos
de entrada e seus conjugados correspondentes (VERSPECHT e ROOT, 2006).
Após o rearranjo da equação básica, considerando a substituição das partes real e
imaginária, obtêm-se a equação básica do modelo PHD.
| | ∑ | |
∑ | |
(2-13)
As funções e são definidas como
| | | | |
| (2-14)
| | (2-15)
{ } { } | | | | | | (2-16)
2.3
Interpretação Intuitiva
O modelo PHD básico, disposto na Eq. (2-13), indica que as ondas refletidas são
resultantes do mapeamento linear das ondas incidentes, similarmente ao que acontece com
os parâmetros-S clássicos. Contudo existem diferenças que podem ser analisadas do
seguinte modo:
O lado direito da Eq. (2-13) contêm a contribuição das ondas incidentes associadas
com os seus conjugados. Comparando com os parâmetros-S clássico, o termo conjugado não
está presente, o que ocorre devido ao fato que, na análise por parâmetros-S a contribuição de
um sinal de entrada no sinal de saída não está relacionada com a fase do sinal de entrada. Para os parâmetros-X, qualquer deslocamento de fase no sinal de entrada será refletido em
um deslocamento de fase no sinal de saída. Mas, ao considerar que o sinal é um sinal na
frequência fundamental e que é relativamente grande comparado às harmônicas (como
definido nas propriedades), este sinal será utilizado como uma referência de fase para todos
os outros sinais de entrada e a contribuição no sinal de saída de um determinado sinal de
entrada dependerá da relação entre este sinal e a fundamental ( ). Este relacionamento
entre os sinais está representado na Eq. (2-13) pela presença do conjugado. Como exemplo,
será feita uma análise somente sob o caso do parâmetro (fundamental na saída)
dependente de (fundamental refletida na saída) e de (fundamental incidente na
entrada). Desta forma a Eq. (2-13) pode ser reduzida para:
| | | | | | (2-18)
A contribuição de em , utilizando a notação , resulta em:
| | | | (2-19)
Dividindo todos os termos da Eq. (2-19) por , resulta no parâmetro ,
equivalente para grandes sinais.
| | | |
Utilizando a Eq. (2-9), pode-se reescrever a Eq. (2-20) como:
| | | |
(2-21)
O parâmetro , equivalente para grandes sinais, possui dois termos. O primeiro
termo está relacionado somente com a amplitude de , com comportamento idêntico ao
parâmetro clássico. O segundo termo não depende somente da amplitude do sinal de
entrada, mas também da diferença de fase entre e . Nota-se também que esta parcela
não depende da amplitude do sinal . Então, pode-se afirmar que o sinal é descrito
pela somatória de duas funções complexas (utilizando o sinal de entrada como argumento):
a primeira função , que representa a parte independente da relação de fases entre e
, e a segunda função , que representa a parte dependente da relação de fases entre
e .
2.4
Aplicações e Limitações práticas da modelagem PHD
O objetivo principal dos parâmetros não lineares é de auxiliar o projeto de sistemas não lineares com técnicas de simulação que não utilizem modelos simplificados ou
compactos dos dispositivos. Os parâmetros-X sobrepõem o paradigma da utilização dos
parâmetros-S para pequenos sinais, para o regime de grandes sinais e reduz a complexidade
da modelagem e do projeto na maioria dos casos.
Devido a esta facilidade no desenvolvimento de projetos, foram desenvolvidas
ferramentas de simulação que utilizam parâmetros-X para simulação de sistemas não
lineares. Como por exemplo, a suíte de ferramentas Advanced Design System da Agilent
Technologies que utiliza os parâmetros-X extraídos dos dispositivos para as diversas
simulações disponíveis. Além disso, seguindo a utilização dos S, os
2.4.1 Aplicações
Para a operação de amplificadores em pequenos sinais, algumas características
como, por exemplo, o ganho de potência e o produto de intermodulação são descritos
totalmente dependentes dos parâmetros-S, da carga e dos coeficientes de reflexão da fonte
(GONZALEZ, 1997). Então, como extensão natural para a análise não linear desses
dispositivos, pode-se descrever estas características dependentes dos parâmetros-X, por
exemplo, além de obter outras figuras de mérito de sistemas não lineares, tais como
estabilidade e o ponto de interceptação de terceira ordem. Por isto os parâmetros-X estão
sendo utilizados constantemente para o auxilio no projeto de amplificadores de potência
(BOAVENTURA, A.J.S. e CARVALHO, N.B., 2011), (HORN, VERSPECHT, J, et al.,
2008), (XIN DONGDONG e LIN MAOLIU, 2011).
Outra aplicação difundida é na análise de mixers utilizados em receptores, pois a
análise das harmônicas e da defasagem entre os sinais é de extrema importância para o
projeto destes dispositivos (XIE, TAO ZHANG e DI LIU, 2012), (HORN, J., ROOT, D.E. e
SIMPSON, G., 2010).
2.4.2 Limitações
Os parâmetros-X como descritos na Eq. (2-13) podem ser considerados como uma
plataforma de caracterização de dispositivos não lineares e umas das principais
considerações feitas para o desenvolvimento da modelagem PHD considera que o sistema é
invariante no tempo. Contudo, ao se desenvolver sistemas para rádio frequência (RF) os
dispositivos podem ter um comportamento variante no tempo. Entre eles podemos citar o
efeito da influência da variação da temperatura. Esses efeitos são conhecidos como “efeito
memória”. A modelagem PHD foi modificada em (VERSPECHT, HORN, et al., 2009) para incluir estes efeitos, mas a modificação sugerida somente é válida quando a taxa de variação
for insignificante quando comparada com a velocidade da modulação. O artigo de (VERSPECHT, HORN e ROOT, 2010) estende a funcionalidade dos parâmetros-X para
descrever sinais modulados em banda-larga, ou sinais nos quais o envelope varia mais
artigos, teoricamente, não há limitações para o uso dos parâmetros-X, embora, a modelagem
do “efeito memória” ainda não tenha sido implementada nas ferramentas de simulação e nas
soluções de medições.
Outro detalhe da utilização dos parâmetros-X para aplicações não lineares é o
número limitado de harmônicas que podem ser medidas. Esta limitação é proveniente do
alto esforço computacional utilizada durante as simulações, pois quanto maior for a
Capítulo 3
Banco de testes para simulação de parâmetros-X
3.1
Introdução
A introdução dos parâmetros-X foi feita Vespecht e Root abriu novas possibilidades
na área de projetos de sistemas não lineares. O método da distorção poli-harmônica pode ser
utilizado para criar representações precisas de sistemas eletrônicos que incluem não
linearidades. (VERSPECHT e ROOT, 2006)
A modelagem por meio dos parâmetros-X é baseada na teoria dos parâmetros-S e por isso é considerado uma evolução desses. A relação entre ondas incidentes e refletidas não é
descrita somente por meio de relações entre as portas, mas sim na relação entre harmônicas.
Este trabalho tem como objetivo analisar a caracterização por parâmetros-X de
estruturas planares e observar as diferenças encontradas em relação a parametrização por
meio de parâmetros-S.
Os parâmetros-X são marca registrada da empresa Agilent Technologies, por isso,
será utilizado o programa computacional comercial Advanced Design System 2011.05(ADS)
da empresa citada.
Para realizar esta análise foi desenvolvido um banco de testes para padronizar o
sistema de caracterização de todas as estruturas planares. A descrição e as características
básicas do banco de testes serão descritas nesse capítulo.
3.2
Caracterização do Dispositivo por meio de Parâmetros-S
O primeiro passo para a obtenção dos parâmetros-X é realizar a caracterização básica
do dispositivo sob teste (Device Under Test - DUT) por meio da simulação dos
parâmetros-S. Esta caracterização é necessária para observar se o projeto do dispositivo foi feito
corretamente, como também para utilizar os resultados obtidos ao final do banco de teste
como referência, para compará-los com os resultados obtidos por meio da caracterização por
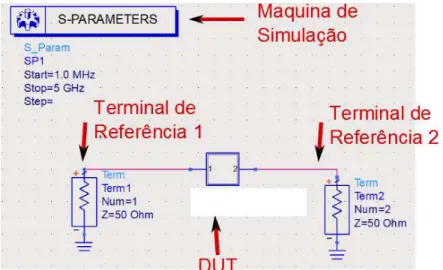
Para a caracterização utiliza-se a ferramenta de simulação de parâmetros-S
disponível no ADS. Na Figura 3.1 é ilustrado o esquema e os componentes necessários para
esta simulação.
Por meio da máquina de simulação são feitos os ajustes na frequência de varredura e
no passo de simulação, conhecido como setup de simulação.
Os terminais de referência são necessários para informar a maquina de simulação as
portas do sistema, suas impedâncias e demais características relevantes.
O dispositivo sob teste (DUT) pode ser incluído diretamente na simulação ou por
meio de um objeto separado, referenciado na simulação.
Figura 3.1: Simulação de parâmetros-S
Após o desenvolvimento e a parametrização do setup de simulação, o sistema está
preparado para simular e fornecer como resultados os parâmetros-S do DUT. Na Figura 3.2
está exemplificado um dos resultados que podem ser obtidos, neste caso o parâmetro de
Figura 3.2: Parâmetros de um filtro passa-baixa
3.3
Obtenção dos Parâmetros-X
O segundo passo na construção do banco de testes é a obtenção dos parâmetros-X do
DUT. Para realizar esta caracterização é necessária a simulação de parâmetros-X disponível
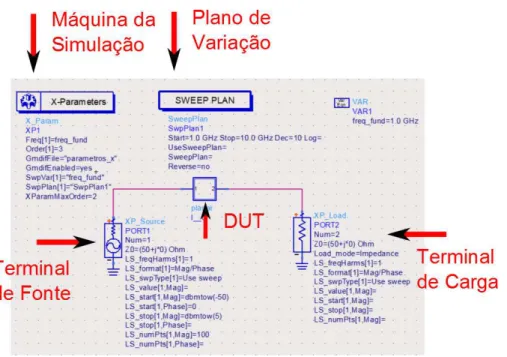
no ADS. Nesta simulação, apresentada na Figura 3.3, são necessários os seguintes
componentes básicos:
Máquina de Simulação;
Plano de Variação;
Terminal da Fonte;
Terminal de Carga;
Terminal de Alimentação DC;
DUT;
A máquina de simulação é o componente básico da simulação, no qual são ajustados
os valores de frequência fundamental e suas harmônicas, a ordem máxima dos
parâmetros-X, a informação da variável que será incrementada durante a simulação e as informações do
arquivo de saída contendo a caracterização de todos os parâmetros do DUT.
O plano de variação é responsável por ajustar a variável a ser modificada durante os
O terminal fonte, diferente do utilizado na simulação por parâmetros-S, além de ser
utilizado como referência também é definido como fonte de sinal. Ele é responsável pelo
ajuste da magnitude do sinal de entrada, seu plano de variação e seu valor final;
O terminal de carga é utilizado para indicar os terminais que não são utilizados como
entrada de sinal e também deve ser ajustada para detectar as variações dos sinais do terminal
de fonte.
O terminal de alimentação DC é necessário quando se deseja trabalhar com
dispositivos ativos e, neste caso, não está sendo utilizado, por se tratar de análise de
estruturas planares passivas.
O DUT é o dispositivo sob teste e foi descrito na Seção 3.2
Figura 3.3: Obtenção de Parâmetros-X
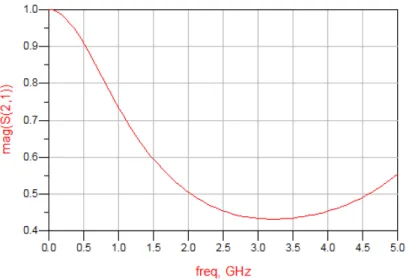
Após a configuração e parametrização, o sistema está pronto para realizar as
simulações e com isso obter os parâmetros-X do DUT. Para simples ilustração, é
apresentada na Figura 3.4, o parâmetro referente à influência da primeira harmônica
da onda de entrada na porta 1 na primeira harmônica da onda de saída da porta 2 de um
Figura 3.4: Parâmetro de um filtro passa-baixa
3.4
Obtenção dos Parâmetros-S a partir do Modelo Caracterizado do
DUT por meio de Parâmetros-X
O terceiro componente do banco de testes é utilizado para a verificação do modelo
caracterizado por meio de parâmetros-X e sua comparação com o modelo obtido a partir dos
parâmetros-S. Para esta caracterização é feita uma nova análise das simulações de
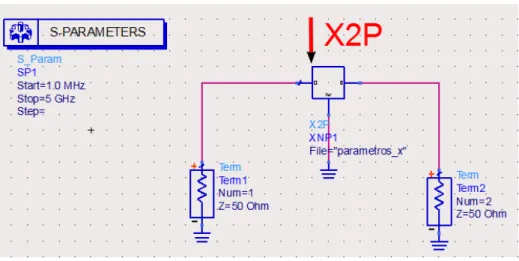
parâmetros-S utilizando agora o modelo obtido no segundo passo do banco de testes. Para
esta simulação é utilizado um novo componente, o X2P que é descrito a seguir e
apresentado na Figura 3.5.
O X2P é um dispositivo de dados de duas portas que tem como entrada o arquivo de
dados obtido durante a simulação de parâmetros-X, ajustado na máquina de simulação.
Com os resultados obtidos nas três etapas do banco, é feita a verificação do erro
Figura 3.5: Simulação de Parâmetros S a partir da caracterização por meio de parâmetros-X
3.5
Banco de Testes Completo
O banco de testes foi desenvolvido de modo a facilitar o desenvolvimento do projeto
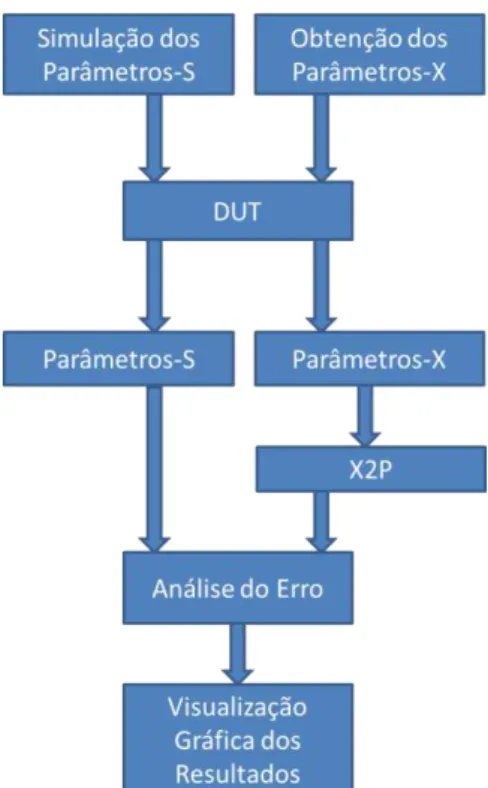
e minimizar os erros que podem ocorrer durante o processo. Resumidamente, pode-se listar
o passo-a-passo do banco da seguinte maneira:
1. Simulação dos parâmetros-S;
2. Obtenção e simulação dos parâmetros-X;
3. Simulação e comparação dos parâmetros-S a partir dos resultados obtidos dos
parâmetros-X;
4. Comparação entre os resultados e análise do erro.
Na Figura 3.6 é apresentado o esquema simplificado do banco de testes utilizado
Figura 3.6: Fluxograma do banco de testes
3.6
Banco de testes adaptado a estruturas planares de geometria
diferenciada
Para caracterizar estruturas planares de geometria diferenciada é feita uma inclusão
de passos adicionais no banco de testes já descrito. Esta inclusão deve-se ao fato de que este
tipo de estrutura precisa ser desenvolvida inicialmente pela ferramenta Momentum, que faz
parte da suíte ADS, para só depois ser caracterizada pelo banco de testes.
O Momentum fornece uma ferramenta de simulação para avaliação e projetos de
sistemas de comunicação. Momentum é uma ferramenta otimizada para simulação de
parâmetros de circuitos planares que incluem linhas de micro-fita, slotlines, striplines, guias
de onda, entre outras. Circuitos de comunicação multicamada e placas de circuito impresso
também podem ser simulados no Momentum com resultados precisos. Por isso o Momentum
é considerado uma ferramenta completa para a análise de desempenho de placas de circuitos
em altas frequências, antenas e circuitos integrados (ADVANCED DESIGN SYSTEM
2011.5, 2011).
Para utilizar o Momentum deve-se inicialmente utilizar a área disponível para
Após o desenho é necessário definir o substrato, as demais camadas utilizadas e os
parâmetros necessários. A Figura 3.7 apresenta o editor de substrato do Momentum.
Figura 3.7: Editor de Substrato do Momentum
Para finalizar as configurações do Momentum, é necessário realizar o setup de
simulação, que é responsável por todos os passos de simulação e extração de parâmetros da
estrutura e a criação do componente equivalente a ser utilizado no banco de testes original.
Com a inclusão destes passos adicionais o banco de testes modificado é apresentado
Capítulo 4
Simulação de Parâmetros-X para estruturas planares
4.1
Introdução
Para a verificação da funcionalidade do banco de testes e da análise dos
parâmetros-X de estruturas planares, faz-se necessário a simulação destas estruturas. De acordo com a
análise dos resultados obtidos, será investigada a utilidade da caracterização por
parâmetros-X destas estruturas.
Serão feitas as análises de quatro estruturas planares: uma linha de micro-fita, um
filtro passa-faixa, um filtro passa-faixa com banda ultra-larga e uma antena patch. Os
resultados obtidos a partir do banco de teste serão apresentados neste capítulo.
4.2
Linha de Micro-Fita
A linha de micro-fita é uma estrutura composta basicamente de uma linha metálica
disposta sobre uma camada dielétrica e um plano de terra, como ilustrado na Figura 4.1.
Figura 4.1: Linha de microfita.
Para realizar os testes necessários, foi escolhida uma linha de micro-fita com
substrato de fibra de vidro (FR-4) com espessura de 1 e permissividade elétrica
relativa de , projetada para trabalhar em 2,4GHz com fase de -90º. De acordo com as
4.2.1 Simulação de parâmetros-S
O primeiro passo do banco de testes é a verificação do funcionamento da linha de
micro-fita por meio de simulação de parâmetros-S. Para esta simulação foi feita uma
varredura com frequência inicial de 1 MHz até a frequência final de 5 GHz. A faixa de
simulação foi dividida em 100 pontos espaçados linearmente. A Figura 4.2 apresenta os
resultados desta simulação, tomando como referência a magnitude e a fase do parâmetro
. Pode-se observar que a linha está funcionando de maneira correta, sem atenuações e
com a fase de -90º em 2.4GHz. Com isso pode-se seguir para o próximo passo do banco de
testes e realizar a caracterização por meio de parâmetros-X.
Figura 4.2: Parâmetro para a linha de micro-fita calculada
4.2.2 Caracterização da linha por parâmetros-X
Para a caracterização da linha de micro-fita por meio de parâmetros-X, foram
realizadas simulações com as seguintes características:
Frequência Fundamental: 2,4 GHz;
Plano de Variação da Frequência:
o Inicial: 1 MHz;
o Final: 5 GHz;
Máxima ordem dos parâmetros-X: 3ª ordem;
Fonte de entrada: Ajustada na frequência fundamental com a potência
variando entre -50 dBm e 5 dBm;
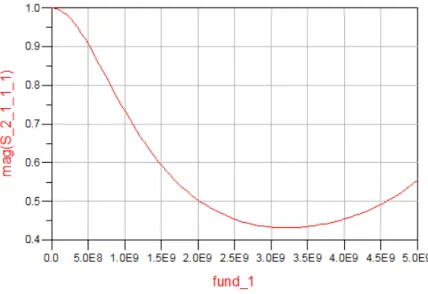
Os resultados obtidos a partir da simulação demonstram uma similaridade com os
resultados que foram obtidos nas simulações de parâmetros-S. A Figura 4.3 apresenta o
parâmetro , referente à relação entre a primeira harmônica da onda de saída na porta 2
em relação a primeira harmônica da onda de entrada na porta 1, mostrando uma semelhança
em relação ao parâmetro apresentado na Figura 4.2.
Figura 4.3: Magnitude e Fase do parâmetro para a linha de micro-fita
Ao analisar os parâmetros característicos de sistemas não lineares, como o parâmetro
que referencia a influência da segunda harmônica na porta 2 em relação a primeira
harmônica na porta de saída 1, pode-se concluir que para este tipo de linha de micro-fita
não há nenhum tipo de relação entre as harmônicas nas portas de entrada e de saída, sendo
esta uma característica pertinente a sistemas lineares. Outra análise que pode ser realizada é
em relação aos parâmetros do tipo , como se pode observar na Figura 4.4, a estrutura
Figura 4.4: Parâmetros e para a linha de microfita
4.3
Filtro passa-faixa
A segunda estrutura a ser analisada é um filtro passa-faixa, construído em micro-fita.
A estrutura testada durante este trabalho foi apresentada em (LIMA DA SILVA, PAIVA
LACERDA e GOMES NETO, 2007). As medidas utilizadas e a disposição do conjunto
estão disponíveis na Figura 4.5. O substrato utilizado nesta simulação possui h=0,794 mm e
.
Figura 4.5: Filtro Passa-faixa de um estágio
4.3.1 Simulação de parâmetros-S
O primeiro passo do banco de testes é a verificação da funcionalidade do filtro
passa-faixa por meio da simulação de parâmetros-S. Para esta simulação, foi feita uma varredura
da frequência com início em 1 GHz e final em 10 GHz, simulado com 100 pontos
parâmetro pode se observar que o filtro apresentou uma banda passante de
aproximadamente 2 GHz. Além disto, também é apresentado na Figura 4.6 a magnitude do
coeficiente de reflexão do conjunto representado pelo parâmetro .
Figura 4.6: Simulação dos parâmetros e
4.3.2 Caracterização do filtro passa-faixa por parâmetros-X
Para a caracterização do filtro por meio de parâmetros-X, foram realizada simulações
de parâmetros-X com as seguintes características:
Frequência Fundamental: 1 GHz;
Plano de Variação da Frequência:
o Inicial: 1 GHz;
o Final: 10 GHz;
o Pontos de Simulação: 100 pontos linearmente espaçados;
Máxima ordem dos parâmetros-X: 3ª ordem;
Fonte de entrada: Ajustada na frequência fundamental com a potência variando entre de -50 dBm e 5 dBm;
Da mesma maneira que ocorreu na linha de micro-fita, os resultados obtidos a partir
da simulação do filtro passa-faixa demonstram uma similaridade com os resultados que
com o comportamento similar ao parâmetro observado na Figura 4.6. Outro parâmetro a
se observar é o , com o comportamento semelhante ao parâmetro da simulação de
parâmetros-S.
Figura 4.7: Simulação de parâmetros-X aplicado a um filtro passa-faixa – Parâmetros e
4.4
Filtro Passa-Faixa UWB
A terceira estrutura a ser analisada é o filtro passa-faixa com banda ultra-larga
apresentado em (RAZALLI, ISMAIL, et al., 2007), este filtro foi desenvolvido em uma
estrutura de micro-fita com stubs curto-circuitados em um quarto de onda com substrato do
tipo RT Duroid 5880, com e . O layout da estrutura é apresentado na
Figura 4.8 e as suas dimensões estão disponíveis na Tabela 4.1.
Tabela 4.1:Dimensões dos Stubs e das Linhas de Transmissão (RAZALLI, ISMAIL, et al., 2007)
Stubs Linha de Transmissão
Linha de Transmissão 50 Ω i L(mm) W(mm) L(mm) W(mm) L(mm) W(mm) 1 8,6 0,4 8,2 1,8 4,0 1,5 2 8,6 0,4 8,3 1,6 4,0 1,5
3 8,6 0,5 8,3 1,6 - -
4 8,6 0,4 8,2 1,8 - -
5 8,6 0,7 - - - -
4.4.1 Simulação dos Parâmetros-S
Inicialmente, a verificação da funcionalidade é feita por meio da simulação dos
parâmetros-S. Para esta simulação foi feita uma varredura da frequência com início em 1
GHz e final em 11 GHz, simulado com 200 pontos linearmente espaçados. Na Figura 4.9
são apresentados como resultado da simulação os parâmetros e . Observando os
parâmetros de dispersão pode-se afirmar que o filtro tem uma resposta em banda larga entre
2,8 GHz e 10,8 GHz, resultado este semelhante aos obtidos em (RAZALLI, ISMAIL, et al.,
2007).
Figura 4.9: Parâmetros e do Filtro Banda Larga
4.4.2 Caracterização do Filtro Passa-faixa com banda ultra-larga por meio de Parâmetros-X
Para caracterizar o filtro passa-faixa com banda ultra-larga larga foram realizadas
Plano de Variação da Frequência:
o Inicial: 1 GHz;
o Final: 11 GHz;
o Pontos de Simulação: 200 pontos linearmente espaçados;
Máxima ordem dos parâmetros-X: 3ª ordem;
Fonte de entrada: Ajustada na frequência fundamental com a potência
variando entre -50 dBm e 5 dBm.
Os resultados obtidos a partir da simulação demonstram uma similaridade aos
resultados que foram obtidos nas simulações de parâmetros-S. A Figura 4.9 apresenta o
parâmetro com o comportamento similar ao parâmetro observado na Figura 4.9.
Outro parâmetro a se observar é o com o comportamento semelhante ao parâmetro
da simulação de parâmetros-S.
Figura 4.10: Parâmetros e do Filtro Banda Larga
4.5
Antena Patch de 2.4 GHz
Para a simulação desta antena patch de 2,4 GHz será utilizado o ADS Momentum e o
banco de testes modificado. Esta utilização é justificada pela complexidade geométrica desta
estrutura, impossibilitando assim o seu desenvolvimento nas ferramentas já utilizadas
Figura 4.11: Antena patch 2,4 GHz
Esta antena foi projetada em substrato RO4003 com espessura de
e permissividade elétrica relativa de .
4.5.1 Simulação de Parâmetros-S
Neste primeiro passo, será feita a caracterização da antena por meio da simulação de
parâmetros-S. Para esta simulação foi feito um plano de variação de frequência iniciando em
1 GHz e finalizando em 3 GHz, com 200 pontos espaçados linearmente. Os resultados
visualizados na Figura 4.12 demonstram que a antena foi corretamente desenvolvida, com a
Figura 4.12: Magnitude em dB de para a antena patch
Seguindo o banco de testes desenvolvido anteriormente, após a verificação da antena
por meio dos parâmetros-S deve-se então, obter os parâmetros-X desta estrutura. O
Momentum não permite que isto seja feito diretamente, mas fornece uma ferramenta de
criação de um componente equivalente ao modelo construído e simulado no momentum. Na
Figura 4.13 é visualizado este componente extraído do Momentum e que pode ser utilizado
pelas demais ferramentas do ADS.
4.5.2 Caracterização da antena por parâmetros-X
Para a caracterização por meio de parâmetros-X da antena, foram realizadas
simulações de parâmetros-X com as seguintes características:
Frequência Fundamental: 2,4 GHz
Plano de Variação da Frequência:
Inicial: 1 MHz
Final: 5 GHz
Pontos de Simulação: 100 pontos linearmente espaçados;
Máxima ordem dos parâmetros-X: 3ª ordem;
Fonte de entrada: Ajustada de acordo com a frequência fundamental com variações
entre -50 dBm e 5 dBm;
Os resultados obtidos a partir da simulação demonstram similaridade aos resultados
obtidos no Momentum. A Figura 4.14 apresenta o parâmetro , mostrando que este
parâmetro pode ser simplificado para o parâmetro .
4.6
Antenas de Microfita com patch Quase-Fractal usando a curva de
Minkowski
Antenas Fractais tem recebido atenção dos pesquisadores da área de micro-ondas
devido a suas características atrativas. A aplicação da geometria fractal numa estrutura de
antena planar, otimiza a configuração da antena, aumenta seu comprimento elétrico,
reduzindo assim suas dimensões (OLIVEIRA, SILVA, et al., 2010).
Durante esta sessão serão analisadas antenas de micro-fita com patch quase-fractal
desenvolvidas em (OLIVEIRA, SILVA, et al., 2010). As antenas propostas pelo artigo
consistem em uma antena patch em um substrato de FR-4 de fibra de vidro com constante
dielétrica de 4,4.
A geometria fractal utilizada no artigo é baseada na curva de Minkowski (Figura
4.15). Esta curva é caracterizada por dois fatores: O fator de iteração e o número de
iterações. Se o número de iterações for zero, obtêm-se a configuração inicial da antena
patch, por exemplo.
Figura 4.15:Diferentes níveis da curva de Minkowski
Para a caracterização por parâmetros-X serão utilizadas as antenas desenvolvidas no
artigo utilizando a curva de Minkowski nos níveis 0(A0), nível 1(M1) e nível 2(M2). As
Figura 4.16:Antenas Quase-Fractal propostas(medidas em mm) (OLIVEIRA, SILVA, et al., 2010)
4.6.1 Simulação dos Parâmetros-S
As antenas foram construídas de acordo com as suas dimensões e características de substrato utilizando o software Momentum. No primeiro passo da utilização do banco de
testes serão feitas as simulações dos parâmetros-S para caracterizar as antenas e compara-las
com os resultados obtidos na referência.
Para cada um dos níveis serão utilizados parâmetros de simulação diferente. No nível
0 utilizou-se um plano de variação com inicio em 2,2 GHz e final em 3,2 GHz com 1000
pontos linearmente espaçados. Para o nível 1 foi utilizado um plano de variação ente 1,2
GHz e 1,8 GHz. Já no nível 2 o plano de variação teve início em 1,1 GHz e final em
1,8GHz. A Figura 4.17 apresenta os resultados obtidos para cada uma das antenas e estes
resultados mostram que o modelo desenvolvido das estruturas no Momentum está de acordo
Figura 4.17: Perdas de Retorno simuladas para as antenas quase-fractais A0, M1 e M2 com 100% das suas dimensões físicas
Após a simulação dos parâmetros-S os modelos são extraídos pela ferramenta do
Momentum e serão caracterizados por meio de parâmetros-X.
4.6.2 Caracterização das antenas quase-fractais por meio de parâmetros-X
Para a caracterização por meio de parâmetros-X das antenas, foram realizadas
simulações com as seguintes características:
Nível 0 (A0):
o Frequência Fundamental: 2,45 GHz;
o Plano de Variação da Frequência: Inicial: 2 GHz;
Final: 3,2 GHz;
o Pontos de Simulação: 200 pontos linearmente espaçados;
o Máxima ordem dos parâmetros-X: 3ª ordem;
o Fonte de entrada: Ajustada de acordo com a frequência fundamental
com variações entre -50 dBm e 5 dBm;
Nível 1 (M1):
o Frequência Fundamental: 1,62 GHz;
Inicial: 1,2 GHz;
Final: 2,2 GHz;
o Pontos de Simulação: 200 pontos linearmente espaçados;
o Máxima ordem dos parâmetros-X: 3ª ordem;
o Fonte de entrada: Ajustada de acordo com a frequência fundamental
com variações entre -50 dBm e 5 dBm;
Nível 2 (M2):
o Frequência Fundamental: 1,4 GHz;
o Plano de Variação da Frequência: Inicial: 1,2 GHz;
Final: 1,8 GHz;
o Pontos de Simulação: 200 pontos linearmente espaçados;
o Máxima ordem dos parâmetros-X: 3ª ordem;
o Fonte de entrada: Ajustada de acordo com a frequência fundamental
com variações entre -50 dBm e 5 dBm;
Os resultados obtidos a partir da caracterização por parâmetros-X demonstram
similaridade aos resultados obtidos na simulação realizada no Momentum. A Figura 4.18
apresenta o parâmetro , mostrando que pode ser simplificado para a perda de retorno
obtida por meio dos parâmetros-X.
A Tabela 4.2 mostra um resumo comparativo entre os resultados obtidos durante a
caracterização por meio de parâmetros-X(1), simulação de parâmetros-S(2) e resultados das
simulações obtidos em (OLIVEIRA, SILVA, et al., 2010) (3).
Tabela 4.2: Resumo dos resultados das simulações das antenas quase-fractais, parâmetros-X(1), parâmetros-S(2) e resultados de simulação obtidos em (OLIVEIRA, SILVA, et al., 2010) (3)
Parâmetros
Antenas
A0 M1 M2
1 2 3 1 2 3 1 2 3
Frequência de
Ressonância (GHz)
2,46 2,46 2,45 1,61 1,61 1,62 1,41 1,41 1,42
Largura de Banda
(MHz)
56 56 60 23 23 26 21 21 21
Perdas de Retorno (dB) -44,71 -44,71 -48,43 -32,2 -32,2 34 -34 -34 -32,81
4.6.3 Análise do fator de compressão aplicado nas antenas de nível 1 e nível 2
Com o intuito de analisar a potencialidade dos parâmetros-X para caracterização de
estrutura planares será feita a análise do fator de compressão aplicado nas antenas de nível 1
e nível 2. De acordo com (OLIVEIRA, SILVA, et al., 2010) o fato de compressão aplicado
na antena de nível 1 para obter a frequência de ressonância próximo da antena de nível 0 é
de 34% e da antena de nível 2 de 42%. Este fator de compressão será aplicado na antena
diretamente no Momentum e será extraído o modelo e caracterizado por meio de
parâmetros-X como feito no banco de testes utilizado. A Figura 4.19 apresenta o resultado desta
Figura 4.19:Perda de Retorno para as antenas redimensionadas para 2,45 GHz
Já na Figura 4.20 são mostrados os resultados obtidos por meio da caracterização de
parâmetros-X comparado com os resultados medidos das estruturas disponibilizados em
(OLIVEIRA, SILVA, et al., 2010).
Figura 4.20: Parâmetro (linhas contínuas) em comparação a perda de retorno medida em (OLIVEIRA, SILVA, et al., 2010)(linhas tracejadas).
A Tabela 4.3 mostra um resumo da comparação entre os parâmetros-X (1), e os
Tabela 4.3:Parametro das estruturas redimensionadas (1) em comparação com os parâmetros das estruturas medidas em (OLIVEIRA, SILVA, et al., 2010) (2)
Parâmetros
Antenas
A0 M1 M2
1 2 1 2 1 2
Frequência de Ressonância (GHz) 2,46 2,46 2,41 2,41 2,44 2,44
Largura de Banda (MHz) 56 60 40 38 41 37
Perda de Retorno (dB) -43 -33 -39,4 -33,43 -38,76 -26,58
Taxa de Compressão --- --- 34% 34% 42% 42%
Os resultados demonstram que, mesmo para estruturas de maior complexidade
geométrica com tamanho reduzido, os parâmetros-X caracterizam adequadamente a
estrutura e não apresentam nenhuma diferença em relação aos parâmetros-S. Como também
não foram observadas durante os processos de caracterização nenhum outro parâmetro-X
que possa mostrar algum princípio de não linearidade da estrutura.
4.7
Análise dos Resultados
Por meio do banco de testes desenvolvido, foi possível analisar as quatro estruturas
de modo a comparar os resultados obtidos por meio da simulação dos parâmetros-S e da
caracterização por meio de parâmetros-X. Com isto observa-se que os resultados das
simulações são semelhantes e por meio do banco de testes pode-se obter um erro percentual
inexistente. Portanto pode-se afirmar que não há diferença significativa na utilização dos
parâmetros-X para simulação destes tipos de estruturas planares. Além disso, por meio dos
resultados obtidos, pode-se concluir que os parâmetros-X para dispositivos lineares podem
ser simplificados para os parâmetros-S equivalentes.
Quando comparado com resultados de medições práticas de parâmetros-S, a
caracterização por parâmetros-X também se mostra válida, mesmo para aplicação que se utilizam de estrutura complexas e de dimensões reduzidas.
Outro ponto a ser considerado é que não há o aparecimento da parcela em
nenhuma das simulações realizadas, isso se dá pelo fato de que não há dependência entre a
A caracterização de estruturas planares por meio de parâmetros-X pode ser
justificada no momento em que estas são utilizadas em conjunto com dispositivos não
lineares e que necessitam de uma caracterização mais adequada. Podemos citar como
exemplo um receptor homodino utilizado em sistemas de comunicação, onde se pode