UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA
ELÉTRICA
CONTROLE VETORIAL PARA VELOCIDADE DE UM MOTOR
DE INDUÇÃO TRIFÁSICO UTILIZANDO ESTIMADOR
FILTRO DE KALMAN
FLÁVIO GONÇALVES DANTAS
ii
Seção de Informação e Referência
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede
Dantas, Flávio Gonçalves
Controle vetorial para velocidade de um motor de indução trifásico utilizando estimador filtro de Kalman / Flávio Gonçalves Dantas. – Natal, RN, 2011.
56 f.; il.
Orientador: Andres Ortiz Salazar.
Dissertação (Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. Controle vetorial – Dissertação. 2. Motor de indução trifásico – Dissertação. 3. Estimador – Dissertação. 4. Filtro de Kalman – Dissertação. 5. Controle de velocidade sensorless – Dissertação. I. Salazar, Andres Ortiz. II. Universidade Federal do Rio Grande do Norte. III. Título.
iii
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
CONTROLE VETORIAL PARA VELOCIDADE DE UM
MOTOR DE INDUÇÃO TRIFÁSICO UTILIZANDO
ESTIMADOR FILTRO DE KALMAN
FLÁVIO GONÇALVES DANTAS
Orientador: Prof. Dr. Sc. Andres Ortiz Salazar – UFRN – CT – DCA.
Natal, RN – Brasil Agosto / 2011
Dissertação submetida ao corpo docente da Coordenação do Programa de Pós-Graduação em Engenharia Elétrica da UFRN (Área de concentração: Automação e Sistemas) como parte integrante dos requisitos para obtenção do título de Mestre em
iv
FLÁVIO GONÇALVES DANTAS
CONTROLE VETORIAL PARA VELOCIDADE DE UM
MOTOR DE INDUÇÃO TRIFÁSICO UTILIZANDO
ESTIMADOR FILTRO DE KALMAN
Dissertação submetida ao corpo docente da Coordenação do Programa de
Pós-Graduação em Engenharia Elétrica da Universidade Federal do Rio Grande do
Norte como parte integrante dos requisitos necessários para a obtenção do título de
Mestre em Engenharia Elétrica.
Aprovado por:
___________________________________________________________ Prof. Andres Ortiz Salazar, D.Sc.(UFRN) - Orientador
___________________________________________________________ Prof. Jose Andres Santisteban Larrea, D.Sc.(UFF-RJ) - Examinador Externo
___________________________________________________________ Prof.André Laurindo Maitelli, D.Sc.(UFRN)
v
________________________________________
Agradecimentos
________________________________________
Ao Deus Pai Criador, entrego os meus mais jubilosos louvores de gratidão! A Ele
dou graças por mais essa grande conquista.
Ao Mestre dos mestres, Filho de Deus, Senhor e Salvador, Jesus Cristo.
Ao Consolador de todas as horas, Espírito Santo.
À minha querida e amada esposa, Sara Liziany, por todo seu amor e dedicação.
Aos meus pais Fernandes e Severina, meus irmãos Flademir e Fernanda, meus
sogros Francisco Júnior e Maria das Dores, meu cunhado Joás Letelier, e aos meus
demais familiares, por sempre acreditarem que seria possível alcançar esse ideal.
Ao Professor Andres Ortiz Salazar, por sua orientação, confiança e paciência.
Aos Professores Rasiah Ladchumananandasivam e Marcos Silva, pelo incentivo e
apoio, além do Superintendente de Infraestrutura da UFRN, Gustavo Rosado, pela
compreensão e apoio.
Aos meus estimados amigos e irmãos em Cristo, em especial a Emanuel Jônatas,
Emerson Natã, Isaque Leonardo e Fábio Barbosa, além de todos aqueles que se
lembram de mim em suas orações.
E aos companheiros da pós-graduação que pesquisam no LAMP e no LECA pela
vi
Aos meus amados pais, Fernandes e Severina, e meus irmãos;
À minha adorável esposa, Sara Liziany.
“Porque Deus amou o mundo de tal maneira que deu seu Filho unigênito, para que
vii
________________________________________
Sumário
________________________________________
Sumário Vii
Lista de Figuras e Tabelas ix
Lista de Símbolos xi
Resumo xiii
Capítulo 1 - Introdução 1
1.1. Estimação de Velocidade 2
1.2. Objetivos da Dissertação 2
1.3. Organização da Dissertação 3
Capítulo 2 - Modelagem do Motor de Indução Trifásico 4
2.1. Introdução 4
2.2. Equações do Motor de Indução Trifásico 6
2.3. Transformação
αβ
82.4. Transformação
d
−
q
122.5. Modelo Vetorial do Motor Orientado pelo Fluxo do Rotor 16
2.6. Conclusões 18
Capítulo 3 - Filtro de Kalman (KF) 20
3.1. Introdução 20
3.2. Definição Matemática do Filtro de Kalman (KF) 21
viii
3.4. Discretização do Estimador Filtro de Kalman (KF) 24
3.5. Conclusões 26
Capítulo 4 - Filtro de Kalman Estendido (EKF) 27
4.1. Introdução 27
4.2. Estimador Filtro de Kalman Estendido (EKF) 28
4.3. Conclusões 32
Capítulo 5 - Estimação de Grandezas do Motor de Indução Trifásico
Utilizando o Algoritmo Filtro de Kalman Estendido 34
5.1. Introdução 34
5.2. Discretização do Modelo do Motor 34
5.3. Conclusões 39
Capítulo 6 - Resultados Obtidos 40
6.1. Introdução 40
6.2. Parâmetros do Motor 40
6.3. Inicialização das Matrizes do EKF 41
6.4. Projeto Proposto para Simulação 42
6.5. Resultados da Simulação 46
6.6. Conclusões 50
Capítulo 7 - Conclusões Finais 51
7.1. Trabalhos Futuros 52
ix
________________________________________
Lista de Figuras e Tabelas
________________________________________
Figura Pág.
2.1 Esquema elétrico do motor de indução trifásico 6
2.2a Máquina trifásica simétrica 9
2.2b Máquina equivalente de duas fases simétricas 9
2.3 Seção transversal do motor de indução com enrolamentos bifásicos
9
2.4 Representação vetorial de uma grandeza elétrica do motor 10
2.5 Referência estacionária, transformação de eixos a-b-c para αβ 13
2.6
Transformação da referência estacionária αβ para referência
de rotação síncrona d−q
15
2.7 As correntes do motor nos diferentes referenciais abordados 16
3.1 O ciclo contínuo do Filtro de Kalman discreto 25
3.2
Um quadro completo da operação do Filtro de Kalman,
combinando o diagrama de alto-nível com as equações de
(3.13) à (3.17)
26
4.1 Um quadro completo da operação do EKF, combinando o diagrama de alto-nível com as equações de (4.21) a (4.25)
32
5.1 Estrutura do Sistema de Controle do EKF 38
6.1 Projeto utilizado para simulação 43
x
6.3 Estrutura interna do bloco “Controle de Pulsos” 44
6.4
Comparação da velocidade pelo Sistema de Controle Escalar
(Referência) com a velocidade do Controle Vetorial EKF
(Velocidade Estimada) com aumento de carga
47
6.5
Comparação das correntes de campo e quadratura do Controle
Escalar (Referência) com as correntes de campo e quadratura
do Controle Vetorial EKF (Estimada) sem aumento de carga
48
6.6
Comparação do torque do Sistema de Controle Escalar
(Referência) com o torque do Controle Vetorial EKF (Estimada)
sem aumento de carga
49
6.7
Comparação da velocidade do Sistema de Controle Escalar
(Referência) com a velocidade do Controle Vetorial EKF
(Velocidade Estimada) com aumento de carga
49
Tabela Pág.
xi
________________________________________
Lista de Símbolos
________________________________________
Símbolo Descrição
δ Defasagem angular entre o enrolamento da fase “a” do estator e a fase “a” do rotor φ Defasagem angular no referencial genérico
αβ Coordenadas Bifásicas
d−q Eixos direto e quadratura
s
i e ir Corrente do estator e do rotor
s
V e Vr Tensão do estator e do rotor
s
R e Rr Resistências de estator e de rotor por fase
s
λ e λr Fluxo de enlace do estator e rotor
θ
ω Velocidade angular do referencial genérico
mec
ω e ωˆmec Velocidade angular do rotor medida e estimada
mr
ω Velocidade angular referente à corrente de magnetização do rotor
LH Indutância de mútua entre enrolamentos de estator e rotor
Ls e Lr Indutâncias próprias do estator e do roto por fase
Te Torque Eletromagnético
Kd Coeficiente de atrito dinâmico
np Número de pares de pólos
J Momento de inércia do rotor
ml Carga constante imposta ao motor
σ Fator de dispersão
Ts Constante de tempo do estator
Tr Constante de tempo do rotor
KF Filtro de Kalman
xii
( )
v k e w k( ) Ruídos do processo e da medida
( )
x k e z k( ) Vetores de medida e estado atuais
( )
x kɶ e z kɶ( ) Vetores de medida e estado aproximados
ˆ( )
x k Estimativa de estado anterior
ˆ( 1)
x k+ Estimativa de estado atual
( )
y k e y kˆ( ) Valores das saídas reais e estimadas
( )
u k e u kˆ( ) Valores das entradas de controle reais e estimados
A, B e C Matrizes de relações do Filtro de Kalman
Ad, Bd e Cd Matrizes de relação A e B discretizadas
R Matriz de ruídos de medição
Q Matriz de ruídos de estados
P Matriz de covariância
K Matriz ganho de Kalman
T Intervalo de amostragem
( )
x k
e e ez k( ) Erro de processo e de medida
( )
ˆx k
e e eˆz k( ) Erro estimado de processo e de medida
s
i e ir Vetor de correntes do estator e do rotor
s
V e Vr Vetor de corrente de estator e do rotor
s
λ e λr Vetor de fluxo do estator e do rotor
dt d
Operador de derivação de uma função ou variável
∫
Operador de integração de uma função ou variávelsen x e cos x Funções seno e cosseno de um ângulo x genérico
xiii
________________________________________
Resumo
________________________________________
Dissertação de Mestrado
Programa de Pós-Graduação em Engenharia Elétrica
Universidade Federal do Rio Grande do Norte
Controle Vetorial Para Velocidade De Um Motor de Indução
Trifásico Utilizando Estimador Filtro de Kalman
Autor: Eng. Flávio Gonçalves Dantas
Orientador: D. Sc. Andres Ortiz Salazar
Esta dissertação apresenta o desenvolvimento de uma simulação
computacional com a finalidade de demonstrar o funcionamento do controle vetorial
para velocidade de um motor de indução trifásico utilizando método de estimação
pelo Filtro de Kalman Estendido, bem como os procedimentos necessários para sua
implementação prática. A motivação maior que influenciou a pesquisa está na
utilização de um sistema de controle inovador que não necessita de sensores no
eixo da máquina (técnica sensorless), proporcionando desta forma uma considerável
redução nos custos de acionamentos e manutenção, aumento da confiabilidade, da
robustez e da imunidade a ruídos em relação ao controle de motores convencionais
com sensores.
xiv
________________________________________
Abstract
________________________________________
Master Thesis on Electrical Engineering
Post-Graduate Program of Electrical Engineering
Federal University of Rio Grande of Norte
Speed Vector Control of Triphasic Induction Motor Estimator Using
Kalman Filter
Author: Eng. Flávio Gonçalves Dantas
Research Supervisor: D. Sc. Andres Ortiz Salazar
This paper describes the study, computer simulation and feasibility of
implementation of vector control speed of an induction motor using for this purpose
the Extended Kalman Filter as an estimator of rotor flux. The motivation for such
work is the use of a control system that requires no sensors on the machine shaft,
thus providing a considerable cost reduction of drives and their maintenance,
increased reliability, robustness and noise immunity as compared to control systems
with conventional sensors.
Keywords: vector control, triphasic induction motor, estimator, Kalman filter,
1
_______________________________________
Capítulo 1
_______________________________________
Introdução
Na atualidade diversas pesquisas são realizadas na área de controle para
velocidade de motores de indução trifásico com a finalidade de se obter um
desempenho mais próximo possível do comportamento do motor de corrente
contínua, mantendo as grandes vantagens do motor de indução como a
robustez, construção simples, necessidade de pouca manutenção e
possibilidade de fornecer um motor totalmente fechado (motor de gaiola),
permitindo assim suprir uma maior demanda de aplicações, como em lugares
mais profundos ou submetidos à alta poluição.
Em aplicações onde se faz necessário um alto desempenho dinâmico,
respostas rápidas e alta precisão de regulação de velocidade, o motor elétrico
deve fornecer essencialmente um controle preciso de torque para uma faixa
extensa de condições de operação. Para tais aplicações os acionamentos com
corrente contínua sempre representaram uma solução ideal, pois a
proporcionalidade da corrente de armadura, do fluxo e do torque num motor de
corrente contínua proporcionam um meio direto para o seu controle. Contudo, a
busca por avanços tecnológicos significativos tem diminuído esta hegemonia e,
gradativamente, estão aparecendo opções de novas alternativas, como o uso de
acionamentos em corrente alternada do tipo controle vetorial (Weg, 2004).
Em razão do controle vetorial nas máquinas de corrente alternada, as
2
desta forma as características de resposta transitória são similares às das
máquinas de corrente contínua de excitação independente. O sistema poderá
se adaptar a qualquer variação de carga e/ou variação do valor de referência
tão rápido quanto à máquina de corrente contínua (Gonzalez, 2004).
Para a aplicação do controle vetorial é de suma importância conhecer a
posição exata das componentes dos eixos d−q, ou seja, a posição correta do
fluxo do rotor (se este for utilizado como referência). Assim, se faz necessário
ter o conhecimento de algum parâmetro que auxilie a encontrar o ângulo do
fluxo do rotor ou a posição dele, obrigando desta forma a medir ou estimar a
velocidade do rotor, e, com o cálculo da velocidade do escorregamento,
determinar a velocidade do fluxo do rotor.
1.1. Estimação da Velocidade
No setor industrial é essencial a redução de custos em sistemas de
acionamentos. Isto pode ser obtido substituindo sensores mecânicos por
técnicas de estimação de velocidade. Esse processo de estimação sem o
auxílio de sensores é denominado técnica “sensorless”. Uma possível
alternativa para determinação da velocidade rotórica do motor é a utilização do
Filtro de Kalman.
1.2. Objetivos da Dissertação
A meta principal deste trabalho é analisar a possibilidade de
implementação de um sistema para controle da velocidade de um motor de
indução trifásico sem a utilização de sensores no eixo da máquina (sensorless)
pelo uso do algoritmo estimador Filtro de Kalman (na sua forma “estendida”, que
será abordada no capítulo 4), o que proporcionaria uma economia nos custos
de acionamentos e manutenção, além do aumento da confiabilidade e robustez
no controle da velocidade.
Para tal objetivo, foi projetado e simulado na plataforma computacional
“Simulink” do Software Matlab um sistema para controle da velocidade rotórica
3
acionamentos, bem como o algoritmo estimador Filtro de Kalman Estendido
(EKF) inserido no bloco “Embedded Function” do Simulink destinado para
programação.
1.3. Organização da Dissertação
No Capítulo 2 são apresentadas as equações que determinam o
comportamento das grandezas eletromecânicas do motor de indução trifásico,
bem como as transformações necessárias para implementação do modelo do
motor no Flitro de Kalman e para o controle vetorial da máquina.
O Capítulo 3 apresenta uma introdução do Filtro de Kalman, aborda seus
conceitos matemáticos bem como seu princípio de funcionamento e introduz os
conhecimentos que serão aplicados no estimador Filtro de Kalman.
No Capítulo 4 é abordada a variação estendida do Filtro de Kalman que
será aplicada ao modelo vetorial do motor de indução .
No Capítulo 5 são demonstradas as equações discretizadas e o algoritmo
do Filtro de Kalman Estendido que será usado para o controle sem sensor da
velocidade do motor e em seguida é apresentado o desenvolvimento de uma
simulação através da ferramenta Simulink/Matlab.
Já no capítulo 6 comprovam-se através de simulações os resultados do
funcionamento do controle da velocidade através do algoritmo estimador Filtro
de Kalman Estendido.
No Capítulo 7 são expostas as conclusões oriundas dos trabalhos
4
_______________________________________
Capítulo 2
_______________________________________
Modelagem do Motor de Indução Trifásico
2.1. Introdução
A facilidade de controle de fluxo e conjugado através das correntes de
campo e de armadura e o menor custo de implantação dos acionamentos de
corrente contínua, fizeram do motor de corrente contínua o mais utilizado nas
aplicações onde se exige rapidez de resposta e operação com alto
desempenho, sobretudo em baixas velocidades (Stopa, 1997).
Por outro lado, as desvantagens inerentes à existência de comutadores e
escovas no motor de corrente contínua, com manutenção excessiva,
não-aplicabilidade a ambientes corrosivos e explosivos, capacidade limitada de
comutação em altas velocidades e limitações a tensões e/ou sobrecargas
elevadas, levaram à procura de soluções que empregassem motores de
corrente alternada.
As máquinas de corrente alternada, entre elas os motores de indução
trifásico, são amplamente utilizados nas mais variadas aplicações em
instalações industriais e comerciais. Eles são adequados para o uso em cargas
que exigem velocidades constantes ou variáveis, ou ainda, com as que exigem
reversões e variadas velocidades.
Existem muitos tipos disponíveis, os quais cobrem uma larga faixa de
5
tipos de fontes de alimentações com diferentes combinações e valores de
número de fases, freqüências e tensões (De Almeida, 2001).
Os principais obstáculos à aplicação da máquina de indução em
acionamentos onde se empregavam máquinas de corrente contínua eram
associados ao limitado desempenho dinâmico das técnicas de controle até
então existentes. O fato das correntes de excitação e de carga na máquina de
indução circularem no mesmo enrolamento e não em enrolamentos separados,
como na máquina de corrente contínua, dificultava o controle. O
desenvolvimento das técnicas de controle vetorial mostrou ser possível o
controle da velocidade nos motores de corrente alternada com desempenho
competitivo com o motor de corrente contínua, despertando a atenção para o
uso de motores de corrente alternada em acionamentos controlados. As
vantagens do controle vetorial são (Weg, 2004):
•
Boa regulação de velocidade;•
Alto desempenho dinâmico;•
Controle de torque linear para aplicações de posição ou de tração;•
Operação suave em baixa velocidade e sem oscilações de torque, mesmo com variação de carga.O motor de indução com o rotor em gaiola de esquilo, em particular, por
ser uma das máquinas de corrente alternada mais barata e robusta, disponível
em várias as faixas de potência, é uma alternativa bastante interessante.
Os avanços na área de eletrônica de potência, com o barateamento dos
semicondutores de potência e também na área de processamento digital de
sinais, com o surgimento de processadores com velocidades cada vez maiores
e a custos decrescentes, tornaram os motores de corrente alternada uma opção
aos de corrente contínua em acionamentos com velocidades controladas.
Entre as principais vantagens dos motores de indução trifásicos,
podemos citar: menor custo, manutenção mais simples e menos freqüente,
menor relação peso/potência, potências maiores, mais simples de proteger em
ambientes com risco de explosão, além de potências limites superiores ao de
6
2.2. Equações do Motor de Indução Trifásico
Para a modelagem matemática de um motor de indução trifásico é
necessário conhecer sua estrutura física e o comportamento dinâmico das
grandezas internas como a corrente e tensão, os enlaces dos fluxos, o torque
eletromagnético além da velocidade e posicionamento do eixo do motor. Ainda
devem ser consideradas as seguintes informações (Krishnan, 2001):
•
O entreferro do motor precisa ter tamanho uniforme;•
Os enrolamentos do estator devem ser idênticos;•
A saturação e mudanças de parâmetros não são consideradas.O motor de indução escolhido para o desenvolvimento deste trabalho foi
do tipo “rotor em gaiola”, conforme as razões explicadas anteriormente. Este
tipo de motor apresenta curto-circuito nos terminais do rotor, o que torna a
tensão nos terminais do rotor nula, ou seja, Vr =0.
O modelo para este tipo de motor possui bobinas trifásicas no rotor e no
estator, conforme representado na figura 2.1, onde δ é a defasagem angular
entre o enrolamento da fase “a” do estator e a fase “a” do rotor, e θ é a
defasagem angular no referencial genérico, e V é a tensão entre os terminais da
bobina, referida “s” para estator e “r” para rotor, assim como sua respectiva fase
(“a”, “b” ou “c”).
7
Admitindo-se um referencial trifásico genérico “θ”, o comportamento
dinâmico da máquina, expresso em função das variáveis de estado velocidade,
fluxo do rotor e correntes do estator, é apresentado nas equações a seguir
(Maschio, 2006):
Vs R is s d s Km s dtλ ωθ λ
= + + (2.1)
0 r r r 2 m r
d
R i K
dtλ ω λ
= + + (2.2)
λs =L is s+L iH r (2.3)
λr =L iH s +L ir r (2.4)
Te = −npλsTK im s =npλrTK im r (2.5)
d mec 1(Te KD mec ml)
dtω = J − ω − (2.6)
Com:
ωele =ωθ −npωmec (2.7)
0 1 1
1
1 0 1
3
1 1 0
m
K
−
= −
−
(2.8)
Onde:
Rs = Resistência do estator;
Rr = Resistência do rotor;
Vs = Tensão no estator;
Vr = Tensão no rotor;
is = Corrente do estator;
ir = Corrente do rotor;
λs= Fluxo de enlace do estator;
λr= Fluxo de enlace do rotor;
8
ωmec= Velocidade angular do rotor;
np = Número de par de pólos do motor;
LH = Indutância mútua entre enrolamentos de estator e rotor;
Ls = Indutância própria do estator;
Lr = Indutância própria do rotor;
Te = Torque eletromagnético;
J = Momento de inércia do motor;
Kd = Coeficiente de atrito dinâmico;
ml = Carga constante imposta ao motor;
As equações do motor podem ser descritas em diferentes referenciais.
Os casos mais adotados são:
•
Referência no estator (estacionária): ωθ =0•
Referência no rotor: ωθ =npωmec•
Referência no campo do estator (síncrona): ωθ =ωeleNo processo de estimação de velocidade são necessárias medições de
tensões e correntes no estator da máquina, por esse motivo o referencial mais
adequado será o estacionário.
2.3. Transformação
αβ
Modelar um motor de indução trifásico de corrente alternada é
consideravelmente complexo, em razão das três fases do circuito rotórico
mover-se em relação às três fases do circuito estatórico.
O fato do comportamento dinâmico do motor apresentar equações
diferenciais com indutâncias mútuas variando no tempo dificulta ainda mais sua
modelagem. Porém, um motor de três fases pode ser representado por uma
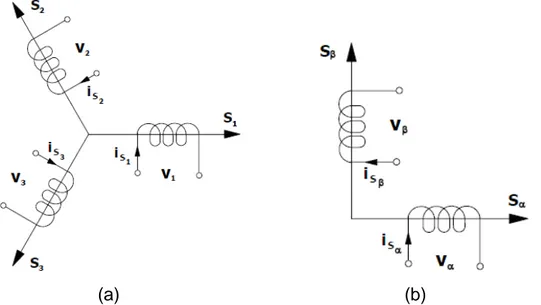
máquina equivalente de duas fases, como mostrado na figura 2.2. Essa
9
(a) (b)
Figura 2.2 – (a) Máquina trifásica simétrica; (b) Máquina equivalente de duas
fases simétricas.
Fisicamente a transformação αβ0 transforma o motor trifásico simétrico
em uma máquina simétrica bifásica, representado na figura 2.3, com mesma
potência mecânica, torque, velocidade e número de pólos (Barbi, 1985). Esse
tipo de abordagem no motor é também designado de “Transformação de
Clarke”.
Figura 2.3 - Seção transversal do motor de indução com enrolamentos
bifásicos.
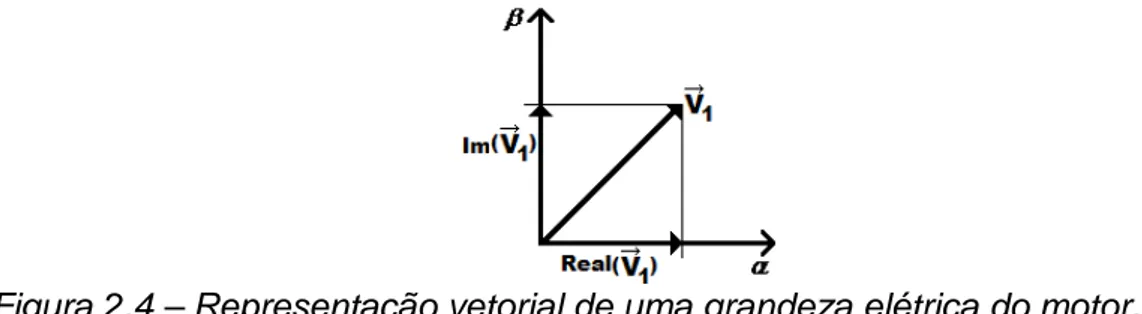
As grandezas que descrevem o modelo do motor passam a ter
representação como entidades complexas, sendo o eixo Real a projeção em α
10
Figura 2.4 – Representação vetorial de uma grandeza elétrica do motor.
As equações das grandezas do motor representadas no plano complexo,
considerando que a fase “a” coincida com o eixo real do plano, são
apresentadas a seguir:
2 2
( )
3 a b c
V Vα jVβ V αV α V →
= + = + + (2.9)
2 2
( )
3 a b c
i iα jiβ i αi α i →
= + = + + (2.10)
2 2
( )
3 a b c
j
α β
λ λ λ λ αλ α λ
→
= + = + + (2.11)
Com:
j2 /3 e π
α = (2.12) 2 j4 /3
e π
α = (2.13) correspondentes à direção espacial geométrica nas fases “b” e “c”, equivalente
aos operadores de deslocamento espacial de 120º e 240º, respectivamente.
Aplicando a transformada αβ0 nas equações (2.1) a (2.6) para o
referencial estacionário (ωθ =0), ou referencial fluxo do estator, obtém-se:
s s s s
d V R i
dtλ
= + (2.14)
0 R ir r d r jnp mec r dtλ ω λ
= + − (2.15)
λs =L is s+L iH r (2.16)
λr =L iH s +L ir r (2.17)
3
( )
* 3( )
*Im Im
2 2
e p s s p r r
11
d mec 1(Te KD mec ml)
dtω = J − ω − (2.19)
O modelo do motor de indução no domínio contínuo pode ainda ser
escrito na forma de equações de estado, que será necessário para a
implementação do Filtro de Kalman, segmentando em parte real e imaginária
em função das variáveis corrente do estator e fluxo do rotor, obtendo-se:
1 1 1 H H
s s s r r r
s s r s r r s r
L L
d
i V i
dt α L α T T α L L T α L L β
σ λ ω λ
σ σ σ σ σ
−
= − + + −
(2.20)
1 1 1 H H
s s s r r r
s s r s r r s r
L L
d
i V i
dt β L β T T β L L T β L L α
σ λ ω λ
σ σ σ σ σ
−
= − + + −
(2.21)
1 H
r r s r r
r r
L d
i
dtλα = −T λα + T α+ω λβ (2.22)
1 H
r r s r r
r r
L d
i
dtλβ = −T λβ + T β−ω λα (2.23)
3 ( )
2
e H p r s r s
r
T L n i i
L λα β λβ α
= − (2.24)
Com: 2 1 H s r L L L
σ = −
é o fator de dispersão; (2.25)
s s s L T R
= é a constante de tempo do estator; (2.26)
r r r L T R
= é a constante de tempo do rotor; (2.27)
Representando as equações acima através de vetores e matrizes,
obtém-se o resultado a obtém-seguir (Kubota, 1993):
d x Ax Bu
dt = + (2.28)
12
Onde:
x=isα isβ λrα λrβT (2.30)
u=Vsα VsβT (2.31)
y=isα isβT (2.32)
1 2 3
1 3 2
4 5 4 5 0 0 0 0 mec mec p mec p mec
a a a
a a a
A
a a n
a n a
ω ω ω ω − − − = − − − (2.33) 1/ 0 0 1/ 0 0 0 0 s s L L B σ σ = (2.34)
1 0 0 0
0 1 0 0 C=
(2.35)
Sendo os coeficientes da matriz A definidos por:
1 1 1 s r a T T σ σ σ − = +
(2.36)
2
H s r r
L a
L L Tσ
= (2.37)
3 H p s r L a n
L Lσ
= (2.38)
4 H r L a T
= (2.39)
5
1
r
a T
= (2.40)
2.4. Transformação
d
−
q
Se para o processo de estimação da velocidade é ideal o referencial
estacionário (orientado pelo fluxo do estator) em coordenadas αβ , por outro
lado no controle vetorial é necessária a orientação pelo fluxo do rotor em
13
torque e fluxo, transforma-se o modelo da máquina de indução em um modelo
similar ao das máquinas de corrente contínua, cujo controle é bem mais simples
e eficaz, tanto para altas como para baixas rotações. O controle vetorial é
executado através das componentes d−q das correntes de campo e
quadratura, oriundas da transformação trifásica para bifásica αβ estacionária e
em seguida para coordenadas d−q, designada de “Transformação d−q”. A
seguir é apresentado o método para obtenção dessas correntes em
coordenadas d−q.
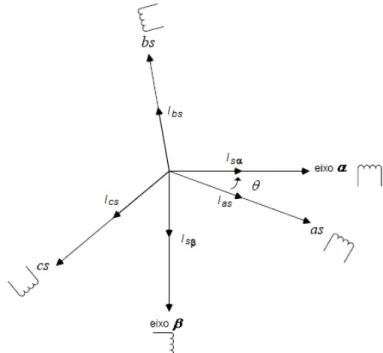
Considere uma máquina de indução de três fases simétricas, com os
eixos as-bs-cs estacionário, defasados de um ângulo de 2π/3, como mostrado
na figura 2.5.
O objetivo é transformar as variáveis as-bs-cs da estrutura de referência
estacionária das três fases em variáveis αβ da estrutura de referência
estacionária de duas fases e então, transformá-la na estrutura d−q de
referência de rotação síncrona e vice-versa. Fisicamente, será a transformação
da máquina bifásica com enrolamentos estatóricos fixos e enrolamentos
rotóricos girantes em enrolamentos estatóricos fixos e rotóricos
pseudo-estacionários (Barbi, 1985). Essa abordagem da máquina é também
denominada de “Transformação de Park”.
14
Supondo que os eixos αβ sejam orientados pelo ângulo θ, como
mostrado na figura 2.5, as correntes isα e isβ podem ser expressas em
componentes as-bs-cs e representadas na forma de matriz por:
(
)
(
)
(
)
(
)
0cos 1
cos 120º 120º 1
cos 120º 120º 1
as s
bs s
cs s
i sen i
i sen i
sen i i α β θ θ θ θ θ θ = − − + +
(2.41)
A relação inversa correspondente é dada por:
(
)
(
)
(
)
(
)
0
cos cos 120º cos 120º 2
120º 120º
3
0.5 0.5 0.5
s as
s bs
cs s
i i
i sen sen sen i
i i
α
β
θ θ θ
θ θ θ
− + = − + (2.42)
is0 é adicionado como componente de seqüência zero, que talvez esteja
presente ou não. A tensão e o fluxo podem ser transformados por equações
semelhantes.
É conveniente fixar θ=0, de modo que o eixo α esteja alinhado com o
eixo as. Ignorando a componente de seqüência zero, a relação de
transformação pode ser simplificada como:
as s
i =iα (2.43)
1 3
2 2
bs s s
i = − iα − iβ (2.44)
1 3
2 2
cs s s
i = − iα+ iβ (2.45)
e inversamente:
2 1 1
3 3 3
s as bs cs as
iα = i − i − i =i (2.46)
1 1
3 3
s bs cs
15
A figura 2.6 mostra os eixos d−q em rotação síncrona, que giram com
velocidade síncrona ωele com relação aos eixos αβ e o ângulo θele =ωelet. As
duas fases do enrolamento αβ são transformadas em um enrolamento
hipotético projetados nos eixos d−q. As correntes nos eixos αβ podem ser
transformadas para uma estrutura de eixos d−q, como mostrado a seguir:
Figura 2.6 – Transformação da referência estacionária αβ para
referência de rotação síncrona d−q.
Com base no diagrama acima, aplica-se a “Transformação de Park”:
cos
qs s ele s ele
i =iα θ −i senβ θ (2.48)
ids =i sensα θele+isβcosθele (2.49)
E a relação inversa, que também é conhecida como “Transformação
Inversa de Park”, é obtida por:
isα =iqscosθele−i sends θele (2.50)
cos
s qs ele ds ele
16
2.5. Modelo Vetorial do Motor Orientado pelo Fluxo do Rotor
Após as transformações αβ durante a modelagem do motor de indução
de corrente alternada foi estabelecida uma relação entre o torque
eletromagnético e as grandezas fluxo do rotor e corrente do estator, conforme
exposta na equação Te=(3 / 2L L nr) H p[λrα βis −λrβ αis ]. No entanto, para obter um
controle de velocidade idêntico ao do motor de corrente contínua, é necessário
o desacoplamento entre o torque e o fluxo do rotor, sendo este último o
referencial para o referido controle. É possível esta orientação estimando a
magnitude e a posição exata desse fluxo do rotor girante baseado no modelo
vetorial do motor, método pelo qual executa o Filtro de Kalman (KF).
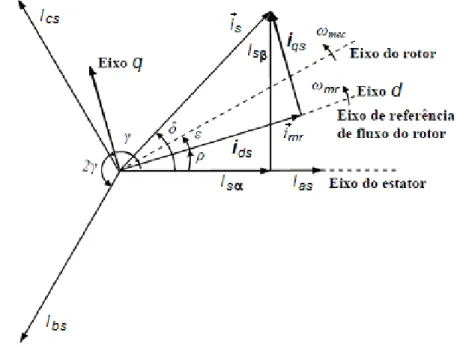
Representando as correntes do motor nos diferentes referenciais
abordados e no mesmo diagrama vetorial, obtém-se o esquema da figura 2.7:
Figura 2.7 – As correntes do motor nos diferentes referenciais abordados
Onde:
mec
ω é a velocidade mecânica do rotor;
mr
ω é a velocidade do campo girante do rotor;
mr
i é a corrente de magnetização que está relacionada com a
17 r mr H i L λ
= (2.52)
Entretanto, se λr =L iH s+L ir r, então a nova equação para imr será:
r
mr s r
H
L
i i i
L
= + (2.53)
Observando o diagrama vetorial, tem-se que:
s sd sq
i =i + ji (2.54)
De maneira análoga, aplica-se também:
r rd rq
i = +i ji (2.55)
Substituindo (2.54) e (2.55) em (2.53), obtem-se:
( ) r ( )
mr sd sq rd rq mrd mrq
H
L
i i ji i ji i ji
L
= + + + = + (2.56)
Adotando o referencial solidário com fluxo do rotor, orientado por ωmr,
considera-se que imr possui apenas parte real, pode-se obter então:
r
mrd sd rd
H
L
i i i
L
= + (2.57)
r 0
mrq sq rq
H
L
i i i
L
= + = (2.58)
Com intuito de encontrar as componentes d−q da corrente rotórica em
18
H ( )
rd mrd sd
r
L
i i i
L
= − (2.59)
H rq sq r L i i L
= − (2.60)
E finalmente, o modelo vetorial contínuo do motor de indução orientado pelo
fluxo do rotor, segmentado em parte real e imaginária, é mostrado a seguir:
mr 1 (mr sd)
r
d
i i i
dt =T − (2.61)
mr sq p mec
r mr
i n T i
ω = + ω (2.62)
Te =K i im mr sq (2.63)
Onde:
3(1 ) 2
m s
K = −σ L (2.64)
Como se observa na equação (2.63), o torque eletromagnético Te é
determinado em função da corrente de magnetização imr (que depende da
corrente ids) e da componente em quadratura da corrente do estator isq,
consequentemente promovendo o desacoplamento entre os vetores fluxo e
torque, o que permitirá o controle vetorial independente de um em relação ao
outro, aproximando-se de um sistema de controle para máquina de corrente
contínua.
2.6. Conclusões
Neste capítulo foi apresentado o modelo vetorial contínuo do motor de
indução na forma de equações de estado em coordenadas αβ de referencial
estacionário, explicitado nas equações (2.28) a (2.40) e que serão utilizados na
implementação do estimador Filtro de Kalman Estendido. Também foi abordada
19
campo ids, que é a responsável pela produção de fluxo, e quadratura iqs, que é
a responsável pela produção de torque, ambas no referencial síncrono (fluxo do
20
_______________________________________
Capítulo 3
_______________________________________
Filtro de Kalman (KF)
3.1. Introdução
Conforme explicado anteriormente, será aplicado um algoritmo estimador
de velocidade denominado “Filtro de Kalman Estendido (EKF)”, que é um
método derivado do “Filtro de Kalman (KF)” convencional. Portanto, para se
compreender o funcionamento do EKF será imprescindível dominar a
metodologia utilizada pelo KF. A seguir será abordada a teoria que envolve as
características do estimador Filtro de Kalman.
O Filtro de Kalman é um conjunto de equações matemáticas que fornece
uma solução recursiva para o problema de estimação de estados para um
processo. A principal vantagem do método recursivo é sua eficiência
computacional em comparação com métodos clássicos, como os mínimos
quadrados, por exemplo. Outra característica importante é que no método
clássico, todas as medidas devem ser conhecidas de antemão para a
estimação, enquanto que o Filtro de Kalman atualiza os cálculos a cada nova
medida que é fornecida pelo sistema de observação. O filtro é muito importante
em vários aspectos como: estimação de estados passados, presentes e futuros,
mesmo quando a natureza do sistema modelado não seja conhecida. O objetivo
deste capítulo é fornecer uma conceituação teórica para a utilização do Filtro de
21
3.2. Definição Matemática do Filtro de Kalman (KF)
O Filtro de Kalman é utilizado em um problema geral da tentativa do
cálculo do estado n
x∈ℜ de um controle discreto de processo que é governado
por uma equação diferencial estocástica linear (Welch, 2004):
x k( )= Ax k( − +1) Bu k( − +1) w k( −1) (3.1)
e com uma medida m
z∈ℜ dada por:
z k( )=Hx k( )+v k( ) (3.2)
As variáveis aleatórias w e v representam ruídos do processo e da
medida (respectivamente). É assumido que os mesmos são independentes um
do outro, são do tipo branco, e com distribuições de probabilidade normais:
p w( )∼N(0, )Q (3.3)
p v( )∼N(0, )R (3.4)
Na prática, as matrizes de covariância do ruído Q e a covariância do
ruído R, podem mudar a cada passo de tempo ou medida, porém aqui são
assumidas como constantes.
A matriz Anxn na equação diferencial (3.1) relaciona os estados no
instante k-1 com o estado do passo k, na ausência de uma função ativadora ou
ruído de processo. A matriz Bnxl relaciona a entrada de controle u∈ℜlao estado
x. A matriz Hnxm na equação da medida (3.2) relaciona o estado com a medida
z. Como as matrizes R e Q, a matriz H também pode mudar a cada passo de
22
3.3. Estimador Filtro de Kalman (KF)
Definindo ˆ( ) n
x k −∈ℜ (notação “super menos”) como sendo o estimador
de estado a priori no passo k, determinando o conhecimento do processo antes
do passo k, e ˆ( ) n
x k ∈ℜ como sendo o estimador de estado a posteriori no
passo k, após a medida z k( ). Então se podem definir os erros dos estimadores
a priori e a posteriori como:
e k( )− ≡x k( )−x kˆ( )− (3.5)
e k( )≡x k( )−x kˆ( ) (3.6)
A covariância do erro no estimador a priori é dada por:
P k( )− =E e k e k[ ( )− ( ) ]−T (3.7)
e a covariância do erro no estimador a posteriori como:
( ) [ ( ) ( ) ]T
P k =E e k e k (3.8)
Ao derivar as equações para o Filtro de Kalman, tem-se como meta
encontrar uma equação que calcule uma estimativa de estado a posteriori x kˆ( ),
como uma combinação linear do estimador a priori x kˆ( )− e uma diferença
ponderada entre a medida atual z k( ) e uma predição de medida Hx kˆ( )−, como
mostrado na equação (3.9):
x kˆ( )=x kˆ( )−+K z k[ ( )−Hx kˆ( ) ]− (3.9)
A diferença [ ( )z k −Hx kˆ( ) ]− em (3.9) é chamada de inovação medida ou
residual. O resíduo reflete a discrepância entre a predição da medida Hx kˆ( )− e a
23
A matriz Knxm em (3.9) é escolhida para ser o ganho ou fator de mistura
que minimiza a covariância do erro a posteriori (3.8). Essa minimização pode
ser realizada primeiramente substituindo (3.9) na definição do erro e k( ), e em
seguida em (3.8), executando as expectativas indicadas, levando a derivada da
substituição do resultado com relação a K, colocando o resultado igual a zero e
resolvendo então para K.
Uma forma para K que resulta na minimização de (3.8) é dada por:
1
( ) ( ) T[ ( ) T ]
K k =P k −H HP k −H +R − ou ( ) ( ) ( )
T T
P k H K k
HP k H R −
−
=
+ (3.10)
Observando (3.10), pode-se notar que se a covariância do erro na
medida R k( ) se aproxima de zero, o ganho K atua sobre o resíduo mais
intensamente, especificamente:
1 ( ) 0
lim ( )
R k K k H
−
→ = (3.11)
Por outro lado, quando a covariância do erro do estimador a priori P k( )−
aproxima-se de zero, o ganho K atua menos intensamente no resíduo,
especificamente:
( ) 0
lim ( ) 0
P k
K k
−→ = (3.12)
Outro modo de pensar sobre a atuação de K é que quando a covariância
do erro de medida R se aproxima de zero, a medida atual z k( ) é cada vez mais
confiável, enquanto a predição da medida Hx kˆ( )− é cada vez menos confiável.
Por outro lado, quando a covariância do erro do estimador a priori P k( )− se
aproxima de zero, a medida atual z k( ) é cada vez menos confiável, enquanto a
24
3.4. Discretização do Estimador Filtro de Kalman (KF)
O Filtro de Kalman faz as estimativas de um processo usando uma forma
de controle de realimentação: o filtro estima o estado do processo em algum
momento e então obtém a realimentação na forma de medidas (ruidosas).
Como tal, as equações para o Filtro de Kalman se dividem em dois grupos:
equações de atualização de tempo e equações de atualização de medida. As
equações de atualização de tempo são responsáveis para projetar adiante o
estado atual, e o estimador da covariância do erro para obter um estimador a
priori para o próximo instante. As equações de atualização de medida são
responsáveis pela realimentação, isto é, por incorporar uma medida nova na
estimativa a priori para obter um estimador melhorado a posteriori.
As equações de atualização de tempo também podem ser vistas como
equações de predição, enquanto as equações de atualização de medida podem
ser vistas como equações de correção. Realmente o algoritmo final de
estimação se assemelha a um algoritmo de predição-correção para resolver
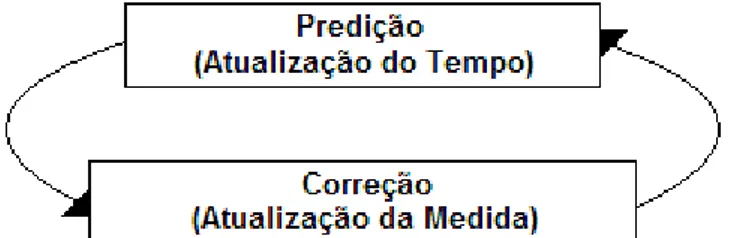
problemas numéricos como mostrado na figura 3.1. As atualizações de tempo
projetam o estimador de estado atual à frente no tempo. A atualização de
medida ajusta o estimador projetado, por uma medida atual naquele momento.
As equações específicas para as atualizações de tempo e medida são
apresentadas abaixo:
x kˆ( )− = Ax kˆ( − +1) Bu k( −1) (3.13)
( ) ( 1) T
P k − = AP k− A +Q (3.14)
Novamente nota-se que as equações de atualização de tempo (3.13) e
(3.14) projetam o estimador de estado e a covariância do erro de estado do
passo de tempo k-1 para o passo k.
1 ( ) ( ) T[ ( ) T ]
K k =P k −H HP k −H +R − (3.15)
ˆ( ) ˆ( ) ( )[ ( ) ˆ( ) ]
x k =x k −+K k z k −Hx k − (3.16)
( ) [ ( ) ] ( )
25
Figura 3.1 - O ciclo contínuo do Filtro de Kalman discreto.
A primeira tarefa durante a atualização de medida é calcular o ganho de
Kalman, K k( ). Note que a equação dada em (3.15) é igual a (3.10). O próximo
passo é medir de fato o processo para obter z k( ), e então gerar um estimador
de estado a posteriori incorporando a medida como em (3.16). Novamente
(3.16) simplesmente é (3.9) repetida aqui. O passo final é obter um estimador
da covariância de erro a posteriori calculado por (3.19).
Depois de cada par de atualizações de tempo e de medida, o processo é
repetido com o estimador a posteriori anterior usado para projetar ou predizer o
novo estimador a priori. Esta natureza recursiva é uma das características muito
atraentes do Filtro de Kalman e torna a implementação prática muito mais
viável. O Filtro de Kalman recursivamente condiciona a estimativa atual em
todas as medidas passadas.
A figura 3.2 oferece um quadro completo da operação do filtro,
combinando o diagrama de alto-nível da figura 3.1 com as equações (3.13),
26
Figura 3.2 – Um quadro completo da operação do Filtro de Kalman,
combinando o diagrama de alto-nível com as equações de (3.13) à (3.17).
3.5. Conclusões
Os conhecimentos adquiridos neste capítulo auxiliarão na compreensão
da versão estendida do Filtro de Kalman, pois o princípio de funcionamento do
Filtro de Kalman Estendido (EKF) é semelhante à versão convencional
abordada neste capítulo, divergindo apenas nas aproximações executadas pela
27
_______________________________________
Capítulo 4
_______________________________________
Filtro de Kalman Estendido (EKF)
4.1. Introdução
Como descrito no capítulo anterior, o Filtro de Kalman é utilizado em um
problema geral da tentativa do cálculo do estado n
x∈ℜ de um controle discreto
de processo que é governado por uma equação diferencial estocástica linear.
Mas, e se o processo a ser estimado e/ou o relacionamento das medidas do
processo for não-linear? Algumas das aplicações mais interessantes e bem
sucedidas da filtragem de Kalman tem sido nessas situações. O Filtro de
Kalman que lineariza determinado modelo de processo, sobre a covariância e o
modelo corrente, é conhecido como “Filtro de Kalman Estendido” ou “EKF”.
O Filtro de Kalman Estendido é basicamente, um observador estocástico
de ordem completa apropriado para estimação ótima recursiva de estado de
sistemas dinâmicos não-lineares (em tempo real), usando sinais que são
corrompidos por ruídos.
De certa forma, relacionado com as Séries de Taylor, é possível
linearizar a estimação em torno da estimativa atual, usando derivadas parciais
do processo e funções medidas para computarem estimativas (mesmo diante
de relacionamentos não-lineares). Assumindo que o processo tem um vetor de
estado n
x∈ℜ , mas agora é governado por uma equação diferencial estocástica
28
x k( )= f x k[ ( −1), (u k−1), (w k−1)] (4.1)
E com uma medida m
z∈ℜ dada por:
z k( )=h x k v k[ ( ), ( )] (4.2)
As variáveis aleatórias w k( ) e v k( ) novamente representam o ruído do
processo e da medida (respectivamente), como em (3.3) e (3.4). Neste caso, a
função não-linear da equação (4.1) relaciona o estado no instante k-1 com o
estado no instante k. Isso inclui como parâmetros algumas direções de funções
( 1)
u k− e o ruído do processo w k( ) médio nulo. A função não-linear h da
equação (4.2), relaciona o estado x k( ) com a medida z k( ).
Na prática, não se conhecem os valores individuais dos ruídos w k( )e
( )
v k para cada passo. No entanto, podem-se aproximar os vetores de estado e
medidas sem eles, como:
x kɶ( )= f x k[ (ˆ −1), (u k−1), 0] (4.3)
E:
( ) [ ( ), 0]
z kɶ =h x kɶ (4.4)
Onde x kˆ( ) é qualquer estimativa a posteriori do estado (vindo do passo
no instante k).
É importante notar que uma falha fundamental do EKF, é que a
distribuição (ou densidade no caso contínuo) das várias variáveis aleatórias,
não é normal depois de submeterem-se as respectivas transformações
não-lineares.
4.2. Estimador Filtro de Kalman Estendido (EKF)
Para estimar um processo com relacionamento de medidas e equações
29
( 1)
ˆ
( ) ( ) [ ( 1) ( 1)] W k
x k ≈x kɶ +A x k− −x k− +W − (4.5)
( )
( ) ( ) [ ( ) ( )] V k
z k ≈z kɶ +H x k −x kɶ +V (4.6)
Onde:
( )
x k e z k( ) são os vetores de medida e estado atuais;
( )
x kɶ e z kɶ( ) são vetores de medida e estado aproximados de (4.3)
e (4.4);
ˆ( )
x k é uma estimativa a posteriori do estado no passo k;
As variáveis aleatórias w k( )e v k( )representam os ruídos das
mediadas e do processo como em (3.3) e (3.4);
A é a matriz Jacobiana das derivadas parciais de f referente a x,
calculado como:
[ ] [ , ]
[ ]
ˆ
[ ( 1), ( 1), 0]
i i j
j
f
A x k u k
x
δ δ
= − − (4.7)
W é a matriz Jacobiana das derivadas parciais de f referente a w,
calculada como:
[ ] [ , ]
[ ]
ˆ
[ ( 1), ( 1), 0]
i i j
j
f
W x k u k
w
δ δ
= − − (4.8)
H é a matriz Jacobiana das derivadas parciais de h referente à x,
calculada como:
[ ] [ , ]
[ ]
[ ( ), 0] i
i j
j
h
H x k
x
δ δ
= ɶ (4.9)
V é a matriz Jacobiana das derivadas parciais de h referente à v,
calculada como:
[ , ] [ ] [ ]
[ ( ), 0] i
i j
j
h
V x k
v
δ δ
= ɶ (4.10)
Para simplificar a notação, não foi usado subscrito do passo no tempo k
com as matrizes Jacobianas A, W, H e V mesmo sendo elas diferentes em cada
passo de tempo.
Agora definindo uma nova notação para a predição do erro:
30
E a medida residual:
eɶz k( ) ≡z k( )−z kɶ( ) (4.12)
Relembrando que na prática, não se tem acesso a x k( ) em (4.11), ele é o
vetor de estado atual, por exemplo, a grandeza a ser estimada. Por outro lado,
tem-se acesso a z k( ) em (4.12), que é a medida atual usada para estimar x k( ).
Usando (4.11) e (4.12), as equações do processo de erro tornam-se:
eɶx k( ) ≈A x k[ ( − −1) x kˆ( − +1)] ε( )k (4.13)
eɶz k( ) ≈Heɶx k( )+η( )k (4.14)
Onde ε( )k e η( )k representam novas variáveis aleatórias, tendo matrizes
de covariância WQWT e VRVT, com Q e R como em (3.3) e (3.4),
respectivamente.
Note que as equações (4.13) e (4.14) são lineares, e são muito parecidas
com as equações de medida e diferença (3.1) e (3.2) do Filtro de Kalman
Discreto. Isso motiva a usar a medida atual residual e kɶz( ) em (4.13) e um
segundo Filtro de Kalman (hipotético) para estimar a predição do erro e kɶx( )
dado por (4.13). Esta estimativa, chamada de e kˆ( ), poderia ser usada junto com
(4.11) para obter uma estimativa do estado a posteriori para um processo
não-linear como:
x kˆ( )=x kɶ( )+e kˆ( ) (4.15)
As variáveis aleatórias de (4.13) e (4.14) tem aproximadamente as
seguintes probabilidades de distribuição:
[ ( )] [0, ( ( ) ( ) )]
T
x k x k x k
p eɶ ∼N E eɶ eɶ (4.16)
p[ ( )]ε k ∼N[0,WQ k W( ) T] (4.17)
[ ( )] [0, ( ) T]
31
Dado estas aproximações, a equação do Filtro de Kalman para estimar
ˆ( )
e k é:
e kˆ( )=K k e( )ɶz k( ) (4.19)
Substituindo (4.19) em (4.15) e usando (4.12), vê-se que não há
necessidade do segundo Filtro de Kalman (hipotético):
x kˆ( )=x kɶ( )+K k e( )ɶz k( ) =x kɶ( )+K k z k( )[ ( )−z kɶ( )] (4.20)
A equação (4.20) pode agora ser usada na atualização de medidas do
Filtro de Kalman Estendido, com x kɶ( ) e z kɶ( ) vindo de (4.3) e (4.4), e o ganho
de Kalman vindo de (3.15), com a substituição apropriada para a covariância do
erro medida.
O conjunto de equações de atualização de tempo e de medida do EKF é
mostrado seguir:
x kˆ( )−= f x k[ (ˆ −1), (u k−1), 0] (4.21)
P k( )− = A k P k( ) ( −1) ( )A k T +W k Q k( ) ( −1)W k( )T (4.22)
As equações de atualização de tempo (4.21) e (4.22) projetam os
estados e a covariância estimada do tempo k-1 para o tempo k. Novamente, f
em (4.21) vem de (4.3), já A(k) e W(k) são as Jacobianas no passo k, enquanto
Q(k) é a covariância do ruído (3.3) no passo k.
1
( ) ( ) ( ) [T ( ) ( ) ( )T ( ) ( ) ( ) ]T
K k =P k −H k H k P k −H k +V k R k V k − (4.23)
x kˆ( )=x kˆ( )−+K k z k( )[ ( )−H x k( ( ) , 0)]ˆ − (4.24)
P k( )= −[I K k H k P k( ) ( )] ( )− (4.25)
As equações de atualização de medidas (4.23), (4.24) e (4.25) corrigem a