Identificação Visual de Caixas de Medicamentos
Usando Features Correspondentes
Xiankleber Cavalcante Benjamim
Orientador: Prof. Dr. Aquiles Filgueira de Medeiros Burlamaqui
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica da UFRN (área de concentração: Engenharia de Computação) como parte dos requisitos para obtenção do título de Mestre em Engenharia de Computação e Elétrica.
UFRN / Biblioteca Central Zila Mamede Catalogação da Publicação na Fonte
Benjamim, Xiankleber Cavalcante.
Identificação visual de caixas de medicamentos usando features correspondentes / Xiankleber Cavalcante Benjamim. – Natal, RN, 2012.
61 f. : il.
Orientador: Prof. Dr. Aquiles Medeiros Filgueira Burlamaqui.
Dissertação (Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação Engenharia Elétrica e da Computação.
1. Visão computacional - Algoritmos - Dissertação. 2. Algoritmos - Visão ocular - Dissertação. 3. Features de identificação - Dissertação. 4. Open Source Computer Vision Library - Dissertação. 4. Medicamentos - Dissertação. 5. Deficiência visual - Dissertação. I. Burlamaqui, Aquiles Medeiros Filgueira. II. Universidade Federal do Rio Grande do Norte. III. Título.
Identificação Visual de Caixas de Medicamentos
Usando Features Correspondentes
Xiankleber Cavalcante Benjamim
Dissertação de Mestrado aprovada em 30 de julho de 2012 pela banca examinadora composta pelos seguintes membros:
_____________________________________________________________________________ Prof. Dr.Aquiles Filgueira de Medeiros Burlamaqui(orientador) . . . . . . . . . . . DCA/UFRN
_____________________________________________________________________________ Prof. Dr. Ricardo Alexsandro de Medeiros Valentim. . . . . . . . . DCA/UFRN
AGRADECIMENTOS
Primeiramente, agradeço a Deus por ter me proporcionado persistência, dedicação, toda a força e energia para a conclusão de mais uma etapa na minha vida.
Agradeço à minha família que sempre me apoiou nos momentos mais difíceis.
Agradeço a todos os professores, em especial àqueles que me inspiraram e orientaram, Aquiles Burlamaqui, Luiz Eduardo Cunha Leite e Luiz Affonso H. Guedes de Oliveira os Coordenadores do Programa Andres Ortiz Salazar e Luiz Marcos G Goncalves.
Agradeço também àqueles que contribuíram, quer de forma direta ou indireta durante todo o mestrado, a saber:
- Aos meus amigos Rafael Gomes Bezerra e Gutemberg Santiago, pelas horas e horas de estudo na construção da dissertação.
- À diretora da Rádio Universitária, Sandra Mara Oliveira de Souza; ao jornalista e ao locutor Fernando Luiz Amaral Ferreira de Souza, e ao Editor de Áudio, Eduardo Pandolphi.
RESUMO
Este trabalho utiliza algoritmos de visão computacional relacionados às features na identificação de caixas de medicamentos para deficientes visuais. O sistema é para pessoas que apresentam alguma enfermidade que comprometa sua visão, prejudicando a identificação do medicamento correto a ser ingerido. Utilizamos a câmera, disponível em vários dispositivos populares como computadores, televisores e celulares, para identificar a caixa do medicamento correto através da imagem e áudio, mostrando ao deficiente as informações sobre a medicação, tais como: a posologia, indicação e contra indicações da medicação. Para isso, utilizamos um modelo de detecção de objetos, usando algoritmos, para identificar as features nas caixas dos medicamentos e tocando o áudio na hora da detecção das feauteres nas referidas caixas. Os experimentos realizados com 15 pessoas mostram que onde 93% acreditam que o sistema é útil e muito útil para identificar os medicamentos pelas caixas. Portanto, torna-se necessário fazer uso dessa tecnologia para ajudar várias pessoas com deficiência visual a tomarem o medicamento certo, na hora indicada, previamente pelo médico.
ABSTRACT
This work uses computer vision algorithms related to features in the identification of medicine boxes for the visually impaired. The system is for people who have a disease that compromises his vision, hindering the identification of the correct medicine to be ingested. We use the camera, available in several popular devices such as computers, televisions and phones, to identify the box of the correct medicine and audio through the image, showing the poor information about the medication, such: as the dosage, indication and contraindications of the medication. We utilize a model of object detection using algorithms to identify the features in the boxes of drugs and playing the audio at the time of detection of feauteres in those boxes. Experiments carried out with 15 people show that where 93 % think that the system is useful and very helpful in identifying drugs for boxes. So, it is necessary to make use of this technology to help several people with visual impairments to take the right medicine, at the time indicated in advance by the physician.
SUMÁRIO
Sumário i
Lista de Figuras iii
Lista de Tabelas v
1 Introdução . . . .13
1.1 Motivação . . . 15
1.2 Objetivo . . . 16
1.3 Metodologia . . . . . . 16
2 Embasamento Teórico . . . . . . 18
2.1 Visão Computacional . . . .. 18
2.2 FEATURES . . . . . . .19
2.2.1 SIFT . . . . . . .. .19
2.2.2 SURF . . . . 20
2.2.3 Detector Heissiano . . . . . . .. 21
2.3 Deficiência visual. . . . . . 23
2.3.1 Catarata. . . .. . . .. . . . .23
2.3.2 Glaucoma. . . . . 24
2.3.3 Degeneração Macular Relacionada à Idade – DMRI. . . .. 25
2.3.4 Retinopatia Diabética. . . 26
2.3.5 Cegueira Infantil. . . .27
2.3.6 Tracoma. . . ..27
2.3.7 Oncocerose. . . .29
3 Trabalhos Relacionados. . . .. . . .31
3.1 Visão em tempo real usando fóvea móvel com multi-resolução . . . .31
3.2 Bengala Eletrônica para a navegação de cego. . . . .32
3.3 Voz ativada para calcular a dosagem de insulina para diabetes em deficientes visuais. . .34
3.4Detecção de Objetos Rápidos através de um robô em um ambiente desordenado. . . 36
3.5 Reconhecimento de imagens usando técnicas visuais . . . 41
3.6 Google Goggles . . . . . . . 43
4.1 Reconhecimento das caixas utilizando recursos . . . 46
4.1.1 Detecção das imagens pelo Algoritmo SURF . . . . . . 46
4.1.2 Aplicando a Fóvea . . . .. . . 48
4.1.3 Reprodução do Áudio . . . . . . .. . 48
4.2 Interação Humano X Computador . . . .. . . 50
5 Experimentos e Resultados . . . 51
5.1 Experimentos e Resultados . . . 51
5.1.1 Recurso na detecção dos objetos . . . 51
5.1.2 Comportamento com olhos vendados . . . 54
6 Conclusões e Trabalhos Futuros . . . . . . . 58
Referências Bibliográficas. . . . . . .59
Lista de Figuras
1.1 Detecção da caixa de medicamento usando uma Câmera . . . ..15
2.1 Reconhecimento entre duas imagens . . . . . . 20
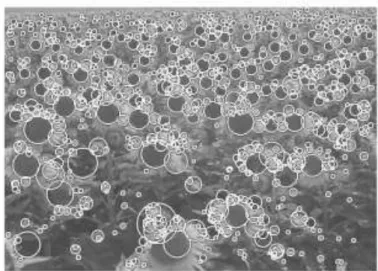
2.2 Exemplo de extração de features SURF. . . 21
2.3 Exemplo de uso de imagens integrais. . . .. . . . .22
3.1 Rastreamento de uma bola usando uma fóvea em movimento . . . . . . 32
3.2 (a) Diagrama do projeto SmartVision. (b) projeto SmartVision com as etiquetas RFID no chão. . . . . . 33
3.3 Diagrama de nível do bloco do sistema. . . . . . 35
3.4 Sistema de robô móvel equipado com uma câmera Flea2, um SR-4000 TOF sensor, e um sensor de UTM-30LX LRF. . . 36
3.5 Diagrama do Sistema . . . . . . .38
3.6 Visão geral de detecção de objetos, que consiste em extração de características, caixa deslizante, e cálculo da similaridade. . . .. . . 39
3.7 Ambiente de destino: (A) layout da sala, e (B) do mapa em 2D criado por SLAM . . . .. . 40
3.8 Exemplos de imagens capturadas durante o rastreamento automático . . . . 40
3.9 Imagens de 59 objetos-alvo, dispostos em ordem aproximada de tamanho cada vez maior de cima da esquerda para a direita. . . 41
3.10 Fotos pertencentes a cada classe . . . . . . .42
3.11 Google Goggles caixa do carregador Ipod . . . 44
4.1 Diagrama do sistema . . . .. . . .. . . .45
4.2 Detecção das features pelo algoritmo Surf . . . 47
4.3 Imagens Originais . . . .49
4.4 Imagens com as remoções . . . 49
5.1 Detecção da caixa pelas features . . . 52
5.2 Detecção da caixa pelas features . . . 53
Lista de Tabelas
5.1 Tempos de processamento das características de extração de cada caixa da
medicação computado apenas uma vez. . . 53
5.2 Taxa de sucesso na detecção das caixas . . . 54
5.3 Dimensões das Caixas . . . . . . 55
5.4 Aplicação do Formulário . . . . . . 56
Capítulo 1
Introdução
Uma pesquisa realizada pelo Instituto Brasileiro de Geografia e Estatística (IBGE) revela que no Brasil temos 9,6 % de analfabetos na população com idade acima de 15 anos. A maioria dos analfabetos no país está concentrada na região Nordeste, representando 53,3 % (7,43 milhões) de todos os brasileiros que não sabem nem ler nem escrever. Esta porcentagem é maior do que no ano de 2000, quando era de 51,4% (IBGE, 2010). Mesmo assim, o brasileiro agrega muito valor a dispositivos como celular e TV. Hoje temos mais de um celular por pessoa no Brasil, e a TV está presente em 96% das residências brasileiras.
Outra informação importante, considerando os objetivos deste trabalho, é salientar o número igualmente expressivo de pessoas idosas que segundo o IBGE (2000) a quantidade de idosos (60 anos e mais de idade) chega a 14,5 milhões, passando a representar 9,1% da população brasileira.
seu Diário Oficial, uma norma na qual diz que os fabricantes de medicamentos são obrigados a colocar nas caixas o nome do medicamento em braile, além de incluir informações sobre conservação e prazo de validade do produto após a abertura, grande parcela da população não é familiarizada com o método braile.
Pessoas com deficiência visual usam outros sentidos como o tato e a audição para perceber o ambiente. Todavia, muitas tarefas necessitam da visão para a sua realização, como a verificação de um semáforo, reconhecimento de edifícios, atravessar a rua e muitas outras. Para pessoas com baixa visão, ou com certos tipos de deficiência visual, existem ampliadores de óculos, telescópios e dispositivos eletrônicos, que as auxiliam nas tarefas diárias (MARGRAIN, 2000; SCOTT et al., 1999).
Figura 1.1: Detecção da caixa de medicamento usando uma Câmera.
Visão computacional é o conjunto de métodos e técnicas, através dos quais, sistemas computacionais são capazes de interpretar imagens. A interpretação de uma imagem pode ser definida em termos computacionais, como a transformação de um conjunto de dados digitais, representando uma imagem (TRUCCO e VERRI, 1998). Visão é o processo de descoberta, a partir de imagens que estão presentes no mundo (MARR, 1993).
1.1 Motivação
comumente manifestadas durante o envelhecimento e que levam à diminuição da acuidade visual, a qual pode ser ou não restabelecida (GASPARETTO, 2012). As doenças da visão se apresentam não somente na terceira idade, mas são muito numerosas também em indivíduos mais jovens, na vida adulta. De acordo com o Censo de 2000, 57,16% da população têm alguma dificuldade de enxergar, 9,90% da população têm grande dificuldade de enxergar e 0,6% da população é incapaz de enxergar (NERI, 2004).
O surgimento de novas tecnologias nos move a pensar em iniciativas eficientes que venham a contribuir com a melhoria da saúde e qualidade de vida, principalmente, dos idosos.
Pensando nisso este trabalho propõe-se, através de uma câmera instalada em qualquer dispositivo (Computador, celular ou televisão), a reconhecer as imagens das caixas dos medicamentos utilizando as Features, ajudando os idosos, os deficientes visuais em geral, os analfabetos, e outras pessoas que, por motivos diversos, apresentam problemas na visão, a tomarem seus medicamentos certos. Ao fazer uso dos medicamentos receitados pelo médico, sabendo da posologia do medicamento, das indicações e contraindicações, haverá uma melhoria tanto em qualidade quanto na expectativa de vida desta parcela da população.
1.2 Objetivo
O objetivo deste trabalho é ajudar adultos em geral e idosos em particular, alfabetizados ou não, portadores de deficiência visual, a identificar os medicamentos através das Features, utilizando uma câmera em qualquer dispositivo (Computador, Celular, TV) para assim melhorar a qualidade de vida desta parcela da população.
1.3 Metodologia
Capítulo 2
Embasamento Teórico
2.1 Visão Computacional
Com o surgimento da visão computacional na década de 70, pesquisadores implementaram técnicas para processar imagens. Uma das técnicas utilizada foi subdividida em partes específicas da visão computacional. Uma dessas subdivisões foi a utilização dos algoritmos de processamento de imagem: filtros, detecção de borda, etc., para extrair características humanas de uma imagem.
Em visão computacional existem algumas etapas importantes como:
a) Aquisição de Imagem: O processo de aquisição de imagem consiste em obter uma sequência de imagens digitais através, de sensores contidos em câmeras digitais.
b) Pré-processamento: O pré-processamento de imagem tem como objetivo preparara imagem para as etapas seguintes. Entre as técnicas comumente utilizadas em visão computacional está à correção da distorção barril, redução de ruídos de imagens e ajuste de contraste (TRUCCO e VERRI, 1998).
c) Extração de características: Alguns pontos da imagem são mais representativos que os demais. Esses pontos são caracterizados, por exemplo, por cantos, textura, bordas, etc. Tais pontos são denominados de características (features). Existem diversos algoritmos propostos na literatura que visam extrair tais pontos na imagem, como SURF (BAY et al., 2006) e SIFT (LOWE, 2004).
d) Detecção e segmentação: A detecção e segmentação destacam uma região da imagem e a segmentam, guardando a informação para um processamento posterior.
Uma vez detectado o objeto, um módulo de inteligência artificial pode utilizar essa informação para algum processo de decisão.
Nas aplicações de visão computacional, os computadores já são pré-programados para resolver uma determinada função. Os métodos de inteligência artificial estão se tornando cada vez mais comuns. A visão computacional é uma área bastante utilizada atualmente, como, por exemplo, em sistemas de aprendizagem ao analisar as imagens para reconhecimento de padrões, como o reconhecimento facial, que identifica e diferencia uma face da outra, ou também, para sistemas de rastreamento e para que robôs possam enxergar.
2.2 FEATURES
As features são pontos na imagem com variações constantes que destacam-se na região. Vários métodos estão disponíveis para detecção de features, tais como filtro de Roberts, filtro de Sobel e detectores de cantos, como o detector de Canny e o detector de Harris (GONZALES e WOODS, 1992).
Quando trabalhamos com as features, utilizamos dois modelos: SIFT (LOWE, 2004) e SURF (BAY et al., 2006). São features projetadas para serem invariantes à escala e à rotação. Quando a região ao redor de uma feature esteja numa rotação ou num escalonamento, o ponto continua a ser detectado como features.
2.2.1 SIFT
Figura 2.1Reconhecimento entre duas imagens.(SPERANDIO e SANTOS, 2011)
2.2.2 SURF
Segundo Bay et al (2006), o algoritmo SURF é inspirado parcialmente no SIFT, na medida em que irá detectar os pontos de interesse de uma imagem com bom desempenho. O algoritmo se divide em três etapas: Criação Integral da Imagem, Determinação de Pontos de Interesse e Criação do Descritor de cada ponto-chave.
Figura 2.2: Exemplo de extração de features SURF. Fonte: BAY et al ( 2006)
No SURF os detectores têm como objetivo detectar pontos salientes, distensíveis das imagens, como cantos. A repetição de um ponto refere-se a quanto esse mesmo ponto continua sendo detectado sob outros pontos de vista.
O descritor de uma feature é um vetor que atribui um valor único. É desejável que esse descritor seja robusto a ruído, às mudanças de iluminação e a deformações geométricas. Um vetor grande pode identificar melhor cada feature, porém é mais custoso computacionalmente. Enquanto um vetor curto tende a ser menos representativo, porém de baixo custo computacional.
2.2.3 Detector Hessiano
O detector usado é o mesmo proposto por Bay et al (2006), a matriz Hessiana.
Detecta-se como uma feature quando a determinante da matriz é maior que um determinante limiar. A matriz Hessiana é dada por:
H(x,s) = "Lxx(x,s) Lxy(x,s) Lxy(x,s) Lyy(x,s) #
3 Imagens integrais.
As imagens integrais são definidas como:
Para se obter o somatório de uma região delimitada pelos pontos A, B, C e D, realiza-se
I(A)−I(B)−I(C)+I(D), conforme ilustra a Figura 2.3.
Figura 2.3 Exemplo de uso de imagens integrais. Fonte: [Bay et al. 2006].
Os filtros utilizados para calcular Lxy e Lyy, os dois primeiros filtros usam valores flutuantes. Se utilizarmos somente pesos inteiros, podemos aproveitar os cálculos obtidos pela imagem integral e obter a resposta ao filtro com poucas operações.
A determinante da Hessiana é calculada da seguinte forma [BAY et al. 2006):
det(Happrox) = DxxDyy−(wDxy)2 , onde w ≃ 0.9.
Derivadas parciais em Y e em XY, e a aproximação usando imagens integrais.Fonte: (BAY et al. 2006)
Na segunda, passaremos por metade dessa frequência, isto é, de dois em dois pixels. Na terceira oitava, teremos intervalo de 22 = 4 pixels, e assim por diante para as demais oitavas.
2.3 Deficiência Visual
Deficiência visual é a perda ou redução da capacidade visual em ambos os olhos, com carácter definitivo, não sendo susceptível de ser melhorada ou corrigida com o uso de lentes e/ou tratamento clínico ou cirúrgico. De entre os deficientes visuais, podemos ainda distinguir os portadores de cegueira e os de visão subnormal.
As causas das deficiências visuais são de dois tipos, congênitas e adquiridas. Dentre as congênitas existem as malformações oculares, glaucoma congênito, catarata congênita. As adquiridas são traumas oculares, catarata, degeneração senil de mácula, glaucoma, alterações relacionadas à hipertensão arterial ou diabetes.
Dentre os problemas mais comuns existem:
2.3.1 Catarata
A catarata, definida como qualquer opacificação do cristalino que reduza a acuidade visual, acomete 75% dos indivíduos acima dos 70 anos de idade e pode causar cegueira (FERRAZ et al., 2002). A cegueira por catarata é reconhecida como grave problema de saúde pública nos países em desenvolvimento e, desta forma, programas de prevenção e controle têm sido estabelecidos para diminuir sua ocorrência. Esta doença ocular que pode ser congênita (mais rara) ou adquirida, que é a forma mais frequente. As cataratas adquiridas, em geral, ocorrem em pessoas acima dos 60 anos e também são conhecidas como cataratas senis (envelhecimento do cristalino). Traumas oculares, uso de corticoesteróides, inflamações intraoculares, exposição excessiva à radiação ultravioleta e diversas doenças associadas, como o diabetes, por exemplo, são causas conhecidas. (LOTTEN EYES, 2012)
para a leitura e a distância também e visão pior com luminosidade. Pode ocorrer bilateralmente e ainda é a maior causa de cegueira no mundo, atingindo milhões de pessoas.
Não existe tratamento clínico para catarata, este é sempre cirúrgico. A partir do momento em que a baixa acuidade visual não é mais corrigida com o uso de correções ópticas há indicação cirúrgica. O momento propício para a realização da cirurgia depende também do prejuízo e do comprometimento que esta opacificação vem trazendo ao cotidiano e as funções habituais do paciente. A técnica cirúrgica mais moderna para o tratamento da catarata, consiste da remoção do cristalino por microfragmentação e aspiração do núcleo, num processo chamado Faco-emulsificação com implante de lente intra-ocular, onde após a retirada completa da catarata, é implantada uma nova lente. Atualmente, temos também a opção de corrigir erros refrativos (miopia, hipermetropia, astigmatismo e presbiopia) na cirurgia de catarata, ou seja, além de retirarmos a catarata contamos com uma variedade de lentes intra-oculares que ajudam a corrigir esses erros refrativos. Consulte o nosso especialista em catarata para saber qual a lente intra-ocular é a mais indicada para melhor satisfazer a sua visão no pós-operatório (LOTTEN EYES, 2012).
2.3.2 Glaucoma
Glaucoma é uma doença ocular causada principalmente pela elevação da pressão intraocular que provoca lesões no nervo ótico e, como consequência, comprometimento visual. Se não for tratado adequadamente, pode levar à cegueira. Há vários tipos de glaucoma. Glaucoma é uma doença assintomática no início. A perda visual só ocorre em fases mais avançadas e compromete primeiro a visão periférica. Depois, o campo visual vai estreitando progressivamente até transformar-se em visão tubular. Sem tratamento, o paciente fica cego. A principal característica do glaucoma de ângulo fechado é o aumento súbito de pressão intraocular. O glaucoma congênito (forma mais rara) acomete os recém-nascidos e o glaucoma secundário que é decorrente de enfermidades como diabetes, uveítes, cataratas, etc.(VARELLA, 2012).
Inicialmente, o tratamento é clínico e à base de colírios. Existem drogas por via oral que só são usadas em casos emergenciais.
Portanto, a medicação oftalmológica é usada por prazo curto enquanto se trata a outra doença que provocou o glaucoma, por exemplo, diabetes. (ABRAG, 2012)
O glaucoma crônico – tipo mais comum da doença – exige o uso constante de colírios pela vida inteira, porque não tem cura. Como pode ser controlado por meio de medicação, cirurgia ou raio laser, o paciente precisa ser mantido sob controle ininterruptamente. Tratamento inadequado ou falta de tratamento podem levar à cegueira. (ABRAG, 2012)
2.3.3 Degeneração Macular Relacionada à Idade
–
DMRI
A Degeneração Macular Relacionada à Idade (DMRI) ou Age Related Macular Degeneration (AMD) é uma condição freqüentemente relacionada ao envelhecimento, de causa desconhecida, na qual ocorre crescimento anormal dos vasos sangüíneos sob a retina especificamente sob o tecido da coróide. A mácula é afetada e o resultado é a baixa súbita ou progressiva da visão central. É comum em pacientes com mais de 55 anos e chega a atingir, em todas as suas formas, mais de 25% dos pacientes acima de 75 anos. A falta de tratamento adequado pode levar à cegueira. Entre a retina (camada do olho altamente sensível aos raios luminosos) e a esclerótica (camada de proteção mecânica do olho, o branco do olho) existe a coróide (camada rica em vasos sanguíneos e células pigmentares estas funcionando como a câmara escura de uma máquina fotográfica). Entre 85 e 90% dos portadores de DMRI apresentam a forma seca da doença, mais branda e de evolução mais lenta. Entre 10 e 15% apresentam a forma exsudativa, bem mais agressiva. Cerca de 90% dos casos de cegueira ou de incapacitação ocorrem entre os que sofrem da forma úmida da doença (LAVINSKY, 2001).
O diagnóstico é comprovado pela cuidadosa avaliação biomicroscópica da mácula (região central da retina que é responsável pelo detalhamento da visão) com lentes de contato e por vários testes angiográficos do olho.
obter um melhor resultado. A terapia fotodinâmica com verteporfirina tem como perspectiva ser associada à terapia antiangiogênica à terapia com esteróide modificado ou desde já, com a terapia sobre o vaso nutridor, à termoterapia transpupilar (TTT), à fotocoagulação com laser argônio, à cirurgia submacular e à translocação macular.
Existem alguns fatores de risco para a Degeneração Macular Relacionada à Idade que são: idade (acima de 40 anos), sexo (ocorrência mais comum no sexo feminino), dieta e nutrição (deficiente em frutas e vegetais), incidência de luz solar, fumo, doenças cardíacas e hereditariedade.
2.3.4 Retinopatia Diabética
2.3.5 Cegueira Infantil
A cegueira infantil continua sendo um problema global sério, principalmente nos países em desenvolvimento. Quando doenças ou outros problemas oculares acometem as pessoas ainda na infância e não são tratados, eles podem resultar em deficiência visual ou cegueira. As causas principais variam e são determinadas, sobretudo por condições socioeconômicas e acesso aos cuidados básicos de saúde e atendimento oftalmológico. (BRITO e VEITZMAN, 2000)
Em países com baixa renda per capita, a cegueira infantil é normalmente causada por cicatrizes na córnea provocadas por sarampo e falta de vitamina A. Em países com renda média per capita, a retinopatia prematura (desenvolvimento anormal de vasos sanguíneos na retina de recém-nascidos) é uma das principais causas de cegueira infantil. Em todos os países, a cegueira infantil pode ser causada por anomalias congênitas, como catarata e glaucoma. Estima-se que 1,4 milhão de crianças são cegas e que 500.000 novos casos surgem a cada ano. Desses novos casos, 50% das crianças morrem em um ou dois anos. Em 1992, a OMS estimava em 1,5 milhões o número de cegos menores do que 16 anos no mundo, 90% dos quais viviam em países em desenvolvimento. Aquelas que sobrevivem, enfrentam grandes dificuldades para se desenvolverem educacional, física e socialmente e para viverem sem enxergar. O impacto econômico é substancial nas crianças e famílias, pois na maioria das vezes, a falta de oportunidades de aprendizagem e treinamento impossibilita as pessoas com deficiência visual de trabalharem. Os casos de deficiência visual infantil causada por Erro Refrativo Não Corrigido podem ser facilmente diagnosticados e corrigidos com o uso de óculos, lentes de contato ou cirurgia refrativa. A cegueira causada por catarata pode ser tratada com uma cirurgia simples e econômica (BRITO e VEITZMAN, 2000).
2.3.6 Tracoma
O agente etiológico do tracoma é a Chlamydia trachomatis, uma bactéria de aproximadamente 200 a 300 milimicra, GRAM negativa, de vida obrigatoriamente intracelular. Apresenta um tropismo pelas células epiteliais, onde se instala e se multiplica, formando inclusões citoplasmáticas. Além do tracoma, a Chlamydia trachomatis é responsável pela conjuntivite de inclusão, pelo linfogranuloma venéreo e por outros quadros de doenças sexualmente transmissíveis. Indivíduos até 10 anos de idade com infecção ativa são considerados o maior reservatório de transmissão da doença em uma comunidade. Crianças com tracoma também podem portar C. trachomatis nos tratos respiratório e gastrointestinal. Não há reservatório animal do tracoma e a Clamídia sobrevive mal fora do hospedeiro humano (FREITAS, 1976).
A transmissão da doença ocorre de forma direta, de olho para olho, ou de forma indireta, através de objetos contaminados. Os insetos podem atuar como vetores mecânicos, em especial a mosca doméstica e a mosca Hippelates sp (lambe-olhos) de importância em algumas regiões. O período de incubação dura em média de 5 a 12 dias. A doença é transmissível enquanto persistirem as lesões ativas da conjuntiva. A infectividade é maior no início da doença e quando coexistem infecções bacterianas agudas ou crônicas. Todos indivíduos são suscetíveis à doença, sendo que crianças reinfectam-se com maior frequência dependendo das condições do meio (LUNA, 1993).
A resposta imune celular é considerada necessária para a cura da infecção, mas provavelmente, também contribuí para o desenvolvimento das lesões conjuntivais cicatriciais.Os anticorpos responsáveis pela proteção podem ser diferentes dos que causam reações deletérias. Se fosse possível estimular, especificamente, as respostas imunológicas protetoras então teriam uma vacina de tracoma eficaz (PELICIONI, 1992).
2.3.7 Oncocerose
A Oncocercose, conhecida também como Cegueira dos rios, doença de Robles, volvulose, erisipela da costa, mal morado, é uma doença parasitária humana crônica. Pode atingir ombros, membros inferiores, pelves e cabeça. Em infecções muito intensas, pode-se encontrar microfilárias na urina, lágrima, escarro e sangue, podendo causar cegueira. A doença ocorre na África, Mediterrâneo, América Central e América do Sul. No Brasil, a maioria dos casos advém dos estados de Roraima e Amazonas, com ocorrência nas reservas das populações Yanomami e Makiritari. A prevalência da Oncocercose é influenciada pela proximidade dos rios e afluentes, locais de desenvolvimento larvar do vetor. Adultos, principalmente do sexo masculino, são afetados nas zonas endêmicas (BRASIL, MINISTÉRIO DA SAÚDE, 2010).
Esta enfermidade (oncocercose ou oncocerciase) se adquiere através da inoculacão das larvas da Onchocerca volvulus pela picada da mosca negra o Simulium, e em especial pela Simulium damnosus, «mosca dos búfalos». O simulídeo é conhecido popularmente como
“borrachudo”, “pium”, que proliferam em córregos e rios de correnteza rápida. É caracterizada pelo aparecimento de nódulos subcutâneos fibrosos sobre superfícies ósseas, em várias regiões, a exemplo de ombros, membros inferiores, pelves e cabeça. Esses nódulos são indolores e móveis e neles são encontrados os vermes adultos que eliminam as microfilárias, as quais, ao se desintegrarem na pele, causam manifestações cutâneas agudas, como o prurido intenso, ou crônicas, caracterizadas por xerodermia, liquenificação ou pseudoictiose, despigmentação nas regiões pré-tibial e inguinal, atrofia, estase linfática (lesões típicas de dermatite crônica). Um dos mais graves comprometimentos do verme ocorre nos olhos causando a cegueira, como ilustra a figura ao lado (BRASIL, MINISTÉRIO DA SAÚDE, 2010).
Os nódulos de parasitas adultos são identificados por técnicas de imagiologia (tomografia computadorizada ou ecografia) ou por análise microscópica de amostra de biópsia. As microfilárias são detectadas em biópsias da pele, assim como frequentemente vistas diretamente pela observação do fundo do olho com um oftalmoscópio. Existe ainda uma técnica de detecção do DNA do parasita por PCR (BRASIL, MINISTÉRIO DA SAÚDE, 2010).
Capítulo 3
Trabalhos Relacionados
Prover um sistema visual a deficientes visuais é um grande passo para aplicações em visão computacional, onde a ideia consiste em os deficientes visuais identificarem seus remédios sem a intervenção humana no ambiente em que se encontram. Porém, o processamento de imagens em tempo real ainda hoje é um dos grandes desafios em visão computacional. Os dados visuais adquiridos através de câmeras instaladas em vários dispositivos são requisitados em tempo real. O problema torna-se crítico quando se extrair diversas informações das caixas de medicamentos podendo haver na hora a troca dos remédios.
3.1 Visão em tempo real usando fóvea móvel com multi-resolução
Os robôs esforçam-se e levam um tempo relativamente longo para detectar imagens em um espaço físico. Existem vários algoritmos que visam melhorar as estimativas do robô na hora de detectar as imagens. De acordo com Hespanha et al.(1998), e Murray e Little (2000) afirmam que existem outras formas de usar a visão nos robôs, sendo elas através das características: textura, bordas, movimento, wavelets.
Esse procedimento melhora a detecção de imagens, através das câmeras do robô, em tempo real, com o mínimo esforço físico, utilizando multi-resolução e as características citadas Rafael Gomes et al (2008), utiliza o modelo da fóvea móvel para o desenvolvimento de sistemas de visão ativa, na implementação de processos visuais em tempo real Segundo Marr e Batista (1993) e Batista et al. (2000). Para realizar este trabalho utilizamos o este modelo fóvea móvel para melhorar a velocidade quando processa as imagens das caixas dos medicamentos.
desse trabalho é que o robô não precisa deslocar-se para a detecção de imagens, só a câmera acompanha a imagem em tempo real, porém uma das desvantagens é à distância da câmera para a detecção das imagens as quais não têm um alcance muito longo.
Figura 3.1: Rastreamento de uma bola usando uma fóvea em movimento Fonte [Gomes 2008]
3.2 Bengala Eletrônica para a navegação de cegos
No sistema o SmartVision utiliza visão estéreo, tags e RFID para minimização dos erros nas coordenadas enviadas pelo GPS para o deficiente chegar ao seu destino; os sinais são enviados através dos pontos de acesso; essas informações enviadas aos deficientes estão armazenadas no servidor chamado GIS que funciona gerenciando e atualizando as informações, como é mostrado na figura 3.2. Essas tecnologias são utilizadas com dois objetivos, o primeiro diz respeito à localização dos usuários cegos, e o segundo refere-se à orientação, fornecendo informações sobre o meio ambiente (FARIA et al., 2010).
Figura 3.2: (a) Diagrama do projeto SmartVision. (b) projeto SmartVision com as etiquetas RFID no chão. Fonte:[Faria et al. 2010].
A bengala apresentou algumas dificuldades para detectar e transmitir as coordenadas ao deficiente, e o tempo de resposta foi bastante lento e desordenado para enviar as coordenadas para a bengala do paciente por causa dos barulhos, buracos, movimentação de várias pessoas, na cidade.
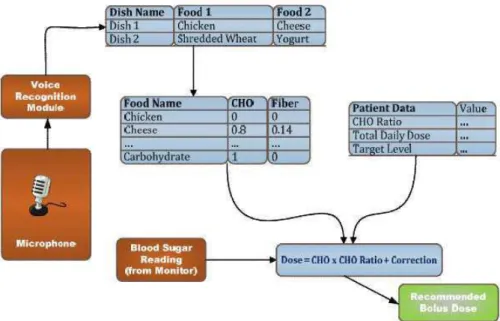
3.3 Voz ativada para calcular a dosagem de insulina para diabetes em
deficientes visuais.
O número de pessoas portadoras de diabetes, tipos 1 e 2, está crescendo mundialmente, por isso um dos objetivos deste trabalho foi abordar as deficiências de calculadoras. bolus para os usuários diabéticos que têm deficiência visual. A deficiência visual é uma complicação para diabéticos, atrapalhando usuário ao utilizar as ferramentas disponíveis para controlar sua doença.
Estima-se que 23,6 milhões de pessoas, somente nos Estados Unidos, têm diabetes, (DIABETES, 2011); destes, aproximadamente 40 a 45% sofrem de alguma forma de retinopatia diabética. A retinopatia diabética varia em gravidade, de visão turva à cegueira (DISEASE, 2012).
Esta diminuição da visão limita a capacidade do usuário para utilizar telas pequenas. Durante as refeições da manhã e à noite, uma dose basal de insulina é administrada nos pacientes com diabetes para coincidir com a taxa metabólica basal. Além disso, o usuário deve calcular este bolus com base na quantidade de carboidratos a serem consumidos e o desvio do nível de glicose no sangue. Para realizar esse cálculo, o usuário utiliza a calculadora bolus, que foi desenvolvida para auxiliar no cálculo na hora das suas medicações.
No entanto, modelos testados para os diabéticos, com uso da calculadora, têm botões pequenos para operá-los, criando uma barreira ao ser usado pelos diabéticos que são deficientes visuais.
Figura 3.3: Diagrama de nível do bloco do sistema. Fonte: Radfar et al. (2011).
O sistema só funciona com um número limitado de palavras, porém seu vocabulário pode ser estendido. O sistema de reconhecimento foi proposto pela primeira vez por.
O algoritmo consistiu em duas fases: na primeira fase foram utilizados quatro alto-falantes e convidadas quatro pessoas para proferir o conteúdo das palavras relacionadas, que são gravadas com um microfone de alta qualidade. As palavras selecionadas compreendem os quarenta alimentos compostos na tabela, utilizados pelos pacientes. Na segunda fase, conhecida como a fase de teste, utilizou-se alto-falantes, fazendo uma comparação com os modelos de referência conhecida como tempo dinâmico. No teste final, escolheu-se o modelo de referência, e falou-se palavras sem estarem gravadas em uma tabela de alimentos (RABINER e JUANG, 1994).
Esta experiência gerou bons resultados nas duas fases, utilizando a interface de voz para deficientes visuais e utilizando a calculadora bolus. Assim houve um controle maior da glicose no sangue dos diabéticos.
3.4 Detecção de Objetos Rápidos através de um robô em um ambiente
desordenado.
Muitas pessoas têm dificuldade de localizar objetos em um ambiente interno desordenado. Isto é comum em um escritório ou laboratório, onde os objetos são muitas vezes perdidos, porque eles foram mudados de lugar.
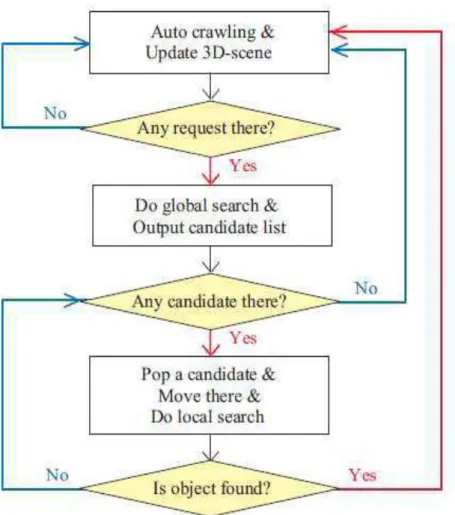
Este trabalho trata do desenvolvimento de um robô móvel (ver figura 3.4) para localizar, automaticamente, objetos, em um vasto ambiente interior, no qual pessoas residem ou trabalham. De forma automática, o robô atualiza os dados do ambiente em cena 3D; quando o sistema envia um pedido para procurar um objeto específico, o robô executa uma pesquisa global dos dados nas cenas em 3D e seleciona várias regiões em que aparecem mais objetos semelhantes ao objeto a ser encontrado. O robô então prossegue para cada uma destas áreas, em ordem decrescente de similaridade, para localizar o objeto.
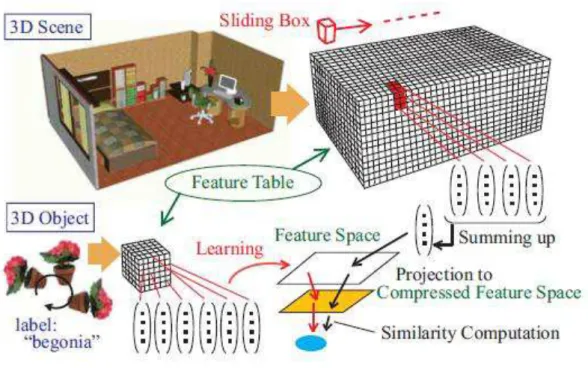
O foco dessa experiência é a detecção de objetos, usando os dados de cenas em 3D de um meio ambiente. Existem várias abordagens para a detecção de objetos em um ambiente 3D; uma delas envolve a detecção de pontos-chave através do SURF (BAY et al., 2006) ou em imagens 2D do meio ambiente, comparando-os aos pontos-chave nas imagens do objeto (LOWE, 2004). Em seguida, verificar a validade 3D geométrico dos keypoints selecionados; a abordagem é para coincidir com o ponto 3D no ambiente e os dos alvos dos objeto do modelo 3D, e então, considerar a similaridade da cor e texturas nestes pontos.
Um diagrama do sistema de busca é mostrado na figura 3.5. O robô rotineiramente rasteja em torno de um ambiente interno, fazendo a atualização regular dos dados das cenas em 3D do meio ambiente.
Quando o sistema recebe um pedido para localizar um objeto, ele executa uma pesquisa global dos dados da cena em 3D. Neste processo, o sistema realiza uma pesquisa para calcular todas as semelhanças entre as regiões e locais do objeto a ser localizado, e, em seguida, gera uma lista de regiões com similaridades superiores num certo limite. Com a movimentação da área em ordem decrescente de similaridade, o robô procura na área os dados atualizando, as cenas em 3D, e repetitivamente executa detecção de objetos. Se o objeto de destino não é descoberto, o robô se move para a próxima área na lista. Se o alvo do objeto não pode ser encontrado em qualquer uma das zonas na lista, o robô reinicia sua rotina e busca-o em todo o ambiente novamente (KANEZAKI et al., 2011).
Figura 3.6: Visão geral de detecção de objetos, que consiste em extração de características, caixa deslizante, e cálculo da similaridade. Fonte: Kanezaki et al. (2011).
O local utilizado para testar o robô foi o laboratório em que eles trabalhavam (Figura 3.7 (a), que tem 7,950 (comprimento) x 11,800 (largura) x 2700 (altura) mm. Como uma etapa de pré-processamento, criaram um mapa; 2D (Fig. 3.7 (b); os pesquisadores moviam o robô, manualmente, em torno do quarto; as cenas iniciais 3D foram os dados utilizados para a aprendizagem de projeção. Para coleta dos dados das cenas em 3D para o teste, o robô foi movido ao redor da sala, automaticamente, ao longo de uma rota circular dada ao robô.
Figura 3.7: Ambiente de destino: (A) layout da sala, e (B) do mapa em 2D criado por SLAM Fonte: Kanezaki et al. (2011).
Figura 3.9: Imagens de 59 objetos-alvo, dispostos em ordem aproximada de tamanho cada vez maior de cima da esquerda para a direita. Fonte: Kanezaki et al.(2011).
Nesta situação ou contexto foi desenvolvido um sistema robótico móvel, que realiza o rastreamento automático em um ambiente interior, e reconstrói os dados das cores em 3D do ambiente para a detecção de objetos, através de uma pesquisa local e global. Com isso, o sistema robótico ajuda a encontrar objetos dentro de um ambiente, pelo reconhecimento 3D.
Em relação a este trabalho, conseguimos relacionar a identificação dos remédios através dos pontos das imagens presente na caixa do medicamento utilizando o algoritmo SURF.
3.5 Reconhecimento de imagens usando técnicas visuais e classificando
características visuais
O número de pessoas que possui máquinas fotográficas e aparelhos celulares com câmeras vem aumentando a cada dia. Partindo dessa ideia, este trabalho foi desenvolvido através da utilização de algoritmos para avaliar e analisar as características de imagens.
Foram avaliadas características de fotos global e local. Como era esperado, as características locais tiveram desempenho melhor dado a sua capacidade de ser menos afetada.
Os smartphones equipados com câmeras têm a capacidade de procurar informações na web, simplesmente apontando a câmera do aparelho para imagens como: um monumento, um restaurante, uma pintura. Considerar a este respeito o serviço experimental "Google Goggles” lançado em 2010 pelo Google, que permite que você obtenha informações sobre uma imagem, através de seu smartphone.
Com os algoritmos utilizados neste trabalho (SIFT, Color SIFT e SURF) pudemos observar analisar e em seguida escolherual usar na nossa pesquisa. Optamos por utilizar o SURF, pois foi o mais rápido na hora da detecção dos medicamentos.
O conjunto de dados construídos, ou seja, as características extraídas das fotos utilizadas e seus rótulos estão disponíveis para o público, na internet (AMATO et al., 2010).
A lista de rótulos atribuídos para as fotos e o número de fotos pertencentes a cada classe pode ser verificada na figura 3.10.
3.6 Google Goggles
O Google lançou uma nova ferramenta de busca visual que é o goggles, criada para smartphones com Android. O Goggles tem a capacidade de reconhecer recentes anúncios, impressos em grandes revistas e jornais americanos, e retornar uma página de buscas sobre o produto ou marca. O usuário aponta a câmera do aparelho para uma placa, um papel, um livro, enfim, aperta um botão, aguarda o programa capturar a informação escrita, escolhe um idioma e, em instantes, terá a tradução. Na figura 3.11 abaixo temos um exemplo do google goggles identificando a caixa do carregador de Ipod.
Capítulo 4
Identificação Visual dos Medicamentos através das Features
Como já foi citado anteriormente, esse trabalho é uma contribuição para pessoas com deficiência visual, como glaucoma, alta miopia, ou outras retinopatias, ao ajudar a identificar os nomes dos medicamentos pelas imagens e pelo áudio, como também associar o momento correto de fazer uso das determinadas medicações. Para realizar este trabalho, foram utilizados algoritmos para a identificação das caixas de medicação, através das Features, ajudando os deficientes visuais a identificarem seus medicamentos, usando a câmera instalada num dispositivo (Computador, celular, tv) e também a tomarem seus medicamentos certos, escutando através do áudio a posologia, a indicação e contraindicação da medicação a ser utilizada.
O diagrama (figura 4.1) abaixo mostra o funcionamento do sistema. Primeiramente, se executa o programa deixando a câmera pronta, depois o paciente identifica onde está a câmera e aponta a caixa de remédio para a mesma, até ser identificada; em seguida, inicia-se o funcionamento do áudio com a posologia, indicações e contraindicações do remédio; se não for o medicamento correto, o paciente troca a caixa da medicação, e aponta novamente para câmera até achar o remédio certo.
4.1 Reconhecimento das caixas utilizando recursos
Cada caixa de remédio é detectada através de suas características visuais. Recentemente, entre os recursos mais utilizados são: SIFT (LOWE, 2004) e SURF (BAY et al., 2006).
São recursos destinados a ser invariantes de escala e rotação. Nesta condição, ambas as propriedades permitem que o sistema detecte o medicamento.
Ao calcular uma homografia entre duas imagens usando o casamento de pontos entre o modelo do objeto e a imagem capturada, e o modelo para o sistema da coordenada da imagem através da decomposição em valores singulares (SVD), obtêm-se a matriz de homografia, e as características dos seus pontos são extraídos e combinados. No entanto, todas as características devem ser coplanares.
Normalmente, cada caixa de medicamento é reconhecida pelo seu lado frontal, que é plano. A parte traseira pode também ser usada, mas pode não ser tão eficaz quanto ao número de acertos como o lado da frente da caixa. No entanto, pode-se optar por registrar ambos os lados, a fim de que o utilizador possa apresentar a caixa à câmera, usando os dois lados.
4.1.1 Detecção das imagens pelo Algoritmo SURF
O processamento da detecção é uma questão importante, porque o sistema deve fornecer um feedback ao usuário sobre a detecção do objeto em tempo real, caso contrário, o utilizador teria que estar com a caixa de medicamento por um longo período de tempo até que o sistema resolvesse detectá-lo. Dentre tantas características sugeridas pela literatura, optamos por utilizar as do SURF porque, atualmente, é uma das mais rápidas em termos de cálculo (BAY et al., 2006). Geralmente, as características são extraídas toda a imagem, o que requer muito tempo de processamento. Por exemplo, no processamento para extrair 780 características, o SURF leva cerca de 150 ms utilizando um Intel Core i5 de 2,3 GHz.
dados. A escala de espaço é dividida em oitavas. Para cada oitava, a taxa de amostragem é reduzida em 2. Na primeira oitava, os filtros têm uma dimensão de 9 x 9.
Os seguintes filtros têm uma incrementação de 6 pixels. Esta incrementação é dobrada após cada oitava. Se a resposta a estes filtros é maior do que um limite, então o ponto centrado é extraído como um recurso. Para cada recurso, um descritor é extraído. Este descritor é utilizado para coincidir com características diferentes (ver Figura 4.2); a orientação da característica é obtida pelo cálculo da resposta dentro de um círculo de raio 6s,que é a escala de recurso.
4.1.2 Aplicando a Fóvea
A fim de reduzir este tempo de processamento usamos uma fóvea, o modelo guiado por mecanismos visuais de atenção. Este modelo fóvea é formado por um conjunto consecutivo de pequenas imagens do mesmo tamanho. O primeiro nível contém a imagem inteira, o segundo nível contém uma menor, e assim por diante. O último nível é um redimensionamento de uma região do mesmo tamanho. Este nível está centrado numa posição chamada fóvea. Em outras palavras, a vizinhança da fóvea tem uma maior resolução e zona periférica (representada pelos primeiros níveis) (GOMES et al., 2008).
Neste trabalho, a quantidade de características extraídas é inversamente proporcional à distância para fóvea.
4.1.3 Reprodução do Áudio
A caixa do medicamento, estando numa posição plana, é detectada com sucesso, usando os recursos correspondentes entre duas imagens, porém podem ocorrer detecções falsas. Esses falsos positivos podem levar a erros inaceitáveis, uma vez que o sistema não deve, sob nenhuma circunstância, indicar o remédio errado.
Desta forma, um histograma é computado contando quantas vezes cada medicamento das caixas utilizadas foi detectado. Se uma caixa de remédio é visualmente detectada, então o áudio é reproduzido.
É necessário um tempo maior suportando a caixa em frente a câmera. Um tempo relativamente longo para acionar o funcionamento do áudio pode irritar o usuário, contudo o algoritmo pode exigir esse tempo. A imagem da caixa ao ser captada de maneira mais rápida aumenta a taxa de detecção de falsos positivos.
de remédios também podem ser muito semelhantes entre si em algumas características, que podem induzir a erro do sistema.
Figura 4.3: Imagens Originais
4.2 Interação Humano X Computador
Antes do início da aplicação do sistema, cada medicamento é registrado com uma imagem e um arquivo de som. A ideia é que, quando uma caixa de medicamento é colocada em frente da câmera, o sistema relata as características da caixa que utilizam a combinação com o áudio. Há duas possibilidades quando um medicamento da caixa é detectado: o sistema está bloqueado e o respectivo arquivo de áudio é reproduzido até que chega ao fim, ou até colocar outra caixa para ser detectada. Outra possibilidade é usar o nome da medicação automaticamente para a detecção, podendo utilizar arquivos que estão na web, de modo que o registro da caixa de medicamento não seria necessário.
Mas, estas abordagens são sujeitas a erros e foram evitadas. Além de fala, utilizamos um sintetizador para ler a medicação, mas depois de algum ensaios, decidimos pedir a um locutor de rádio para gravar partes da medicação como: a posologia indicações e contraindicações da medicação a ser ingerida pelos pacientes.
Capítulo 5
Experimentos e Resultados
5.1 Experimentos e Resultados
Para realizar estes testes, usamos algumas ferramentas como biblioteca OpenCV (Open Source Computer Vision Biblioteca). Os módulos têm imagem OpenCV Processamento e Vídeo I / O, estruturas de dados, álgebra linear,GUI(Graphical User Interface), Basic janela, sistema independente, controlar o mouse e teclado, além de mais de 350 algoritmos, visão por computador, tais como filtros de imagem, calibração da câmera, objeto de reconhecimento, análise estrutural e outros.
As experiências foram divididas em duas partes. Na primeira parte (5.1.1), os usuários estavam com os olhos abertos, e os resultados foram satisfatórios, na detecção dos objetos, ou seja, o sistema detectou com sucesso os medicamentos. Na segunda parte (5.1.2) o mesmo processo é feito com os usuários de olhos vendados.
5.1.1 Recurso na detecção dos objetos
também proporcional ao tempo de processamento. A detecção de duas caixas pode ser visto na Figura 5.1 e 5.2.
Figura 5.2: Detecção da caixa pelas features
Caixa de Medicamentos Número de Features Processamento de Tempo(ms)
#1 345 40.02ms
#2 300 28.77ms
#3 434 33.47ms
#4 242 23.30ms
#5 135 14.50ms
#6 408 32.72ms
#7 325 24.35ms
Caixa da Medicação Taxa de Sucesso #1 #2 #3 #4 #5 #6 #7 100% 100% 100% 90% 100% 100% 100%
Tabela 5.2: Taxa de sucesso na detecção das caixas
5.1.2 Comportamento com olhos vendados
O sistema proposto foi testado com 15 voluntários vendados. Embora estejam vendados, eles não têm quaisquer informações visuais sobre o sistema. Já os deficientes visuais usando seus outros sentidos mais aguçados são capazes de perceber o ambiente de forma diferente das pessoas com os olhos vendados. Após as experiências de identificar os medicamentos, os voluntários são convidados a preencher um formulário (ver Tabela IV), onde responderam sobre o uso do sistema visual.
Caixa da Medicação Dimensões
#1 (11:6 7:0 3:5)cm3
#2 (7:1 3:2 3:0)cm3
#3 (10:5 5:0 2:2)cm3
#4 (11:0 4:6 2:5)cm3
#5 (13:6 5:0 2:5)cm3
#6 (11:1 4:7 2:4)cm3
#7 (7:1 3:2 3:0)cm3
O sistema permitiu que você possa identificar com sucesso uma caixa de remédio?
Sim ( ) Não ( )
Em uma escala de 1 a 5, quão útil você acha o sistema na ajuda para deficientes visuais na identificação de remédios?
( ) 1 Inútil ( ) 2 ( ) 3 Útil ( ) 4 ( ) 5 Muito útil
Em uma escala de 1 a 5, quão difícil foi utilizar o sistema?
( ) 1 Muito fácil ( ) 2 Fácil ( ) 3 Razoável ( ) 4 Difícil ( ) 5 Muito difícil
Indique as dificuldades na utilização do sistema:
( ) Demora para detectar a caixa ( ) Eu não consegui usar
( ) É difícil localizar a câmera e apontar o remédio
( ) É desconfortável usar
( ) Tenho medo que o sistema detecte o remédio errado
( ) Outra: ______________________ Sugestões?
Tabela 5.4: Aplicação do Formulário
Este experimento foi aplicado em 15 estudantes universitários. Todos eles verificaram que o sistema detecta com êxito o medicamento das caixas. Sobre o quão útil o sistema é para o deficiente visual, 80% disse que poderia ser muito útil (escala de 5), cerca de 13% disse que poderia ser útil (escala de 4) e cerca de 6% (1 aluno) disse que é apenas um pouco útil (escala 2). Quando perguntado sobre como é fácil usar o sistema, 40% disse que é razoável (escala 3), cerca de 6% disse que é difícil (escala 4), cerca de 46% disse que é fácil e cerca de 6% disseram que é muito fácil.
Capítulo 6
Conclusão e Trabalhos Futuros
Propomos um sistema de visão computacional que se destina a ajudar pessoas com deficiência visual, detectando e fornecendo informações sobre medicamentos. O uso da detecção das características das caixas dos medicamentos selecionadas tem sido um sucesso.
Porém, rótulos comuns podem dificultar a detecção do objeto. O pré-processamento das imagens pode ser utilizado para remover estas peças manualmente ou automaticamente.
A utilização de uma fóvea modelo proposto por Rafael Gomes et al. (2008) reduziu o processamento do tempo. Deste modo, estes parâmetros devem ter um ajustamento mais fino. Claro, com os olhos vendados, as pessoas podem subestimar ou superestimar alguns aspectos sobre a interação de sistema de visão e tarefas imunológicas. Para trabalhos futuros, pretendemos testar um grupo selecionado de pessoas com deficiência visual.
Depois das experiências, 93% dos voluntários disseram que o sistema poderia ser útil ou muito útil para eles. Observamos que, apesar da maioria das caixas da medicação conter o nome da medicação em Braille, eles não têm posologia, indicações e contra indicações legíveis para pessoas com deficiência visual. Desta forma, o nosso trabalho, também, além de identificar as caixas, ajuda o usuário a lê-los.
A título de informação, esclarecemos que o artigo desse trabalho Visual Identification of Medicine Boxes Using Features Matching foi aceito e apresentado no congresso internacional Ieee International Conference on Vecims Virtual Enviroments Human- Computer Interfaces and Measurement Systems, 2012, Tianjin (China).
Referências Bibliográficas
ABRAG (Associação brasileira dos amigos, familiares e portadores de glaucoma). Tipos de Glaucoma. Em: <http://www.abrag.org.br/index.php?tipos-de-glaucoma>. Acesso em 30 junho 2012.
AMATO, G.; FALCHI, F; BOLETTIERI, P. Recognizing landmarks using automated
classification techniques: Evaluation of various visual features. In: Advances in Multimedia
(MMEDIA) Second International Conferences. 2010. Atenas. p. 78 –83.
BATISTA, J.; PEIXOTO P; ARAÚJO H. Binocular tracking and accommodation controlled
by retinal motion flow. In: Pattern Recognition, 2000. Proceedings. 15° International
Conference on’, Vol. 1, p. 171–174.
BAY, H. et al. Surf: Speeded up robust features. In: ECCV. 2006. p. 404–417. BOELTER, Maria Cristina. et al. Fatores de risco para retinopatia diabética. Arq Bras
Oftalmol. v.66, p. 239-47. 2003.
BRASIL. Ministério da Saúde. Secretaria de Vigilância em Saúde. Departamento de Vigilância Epidemiológica. Doenças infecciosas e parasitárias: guia de bolso. Ministério da Saúde,
Secretaria de Vigilância em Saúde, Departamento de Vigilância Epidemiológica. 8. ed. rev. – Brasília : Ministério da Saúde, 2010.
BRITO, Patrícia Ribeiro; VEITZMAN, Sílvia. Causas de cegueira e baixa visão em ciranças.
Arq. Bras. Oftal. v.63. n.1.Fev. 2000.
BRADSKY, G. R. et al. Learning opencv, Computer Vision with the OpenCV Library. Springer. 2006
BURGHOUTS, G. J.; GEUSEBROEK, Jan-Mark. Performance evaluation of local colour invariants, Comput. Vis. Image Underst. Vol.113. n.1. p. 48–62. 2009.
CHUMKAMON, S. et al. A blind navigation system using rfid for indoor environments, In: Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, 2008. ECTI-CON 2008. 5° International Conference. Vol. 2. p. 765 –768. Diabetes. DISEASE, FACTS ABOUT DIABETIC EYE (2012). Facts about diabetic eye disease
nei health information. Em: www.diabetes.org/about- diabetes.jsp. Acesso em: 26 junho 2012 FARIA, J. Electronic white cane for blind people navigation assistance. In: World Automation
Congress (WAC). 2010. p. 1 –7.
FREITAS, C. A. Prevalência do tracoma no Brasil.Rev. Bras. Malarial D.Trop., v.28.p. 227 – 380. 1976.
GASPARETTO, M. E. R. F. Perda visual em idosos.
Em: http://www.fcm.unicamp.br/auxiliosopticos/index.php/perda-visual-emidosos 33. Acesso em 26 Maio 2012.
GOMES, R. B. et al. Real time vision for robotics using a moving fovea approach with multi resolution, In:IEEE International Conference on Robotics and Automation. pp. 2404–2409. 2008. Gonzales, Rafael C. & Richard E. Woods (1992), Digital Image Processing, Addison- Wesley Publication Company.
HESPANHA, J.P et al. Decidability of robot positioning tasks using stereo vision systems, em Decision and Control. 1998. Proceedings of the 37th IEEE Conference. v. 4. p. 3736 –3741 vol.4.
IBGE (2000). Ibge censo. Em:
http://www.ibge.gov.br/home/presidencia/noticias/25072002pidoso.sht. Acesso em 23 Maio 2012.
IBGE.Ibge censo.Em: http://www.ibge.gov.br/ Acesso em 23 Maio 2012.
KALACHE, A. et al. O envelhecimento da população mundial: Um desafio novo. Rev. Saude publ. Sao Paulo. v. 2. n. 3. p.200-210. 1987.
KANEZAKI, A. et al. Fast object detection for robots in a cluttered indoor environment using integral 3d feature table. In: Robotics and Automation (ICRA), 2011 IEEE International Conference. p. 4026 –4033.
LEVINSKY, Jacó. Degeneração Macular relacionada à idade. 2001. Em: < http://www.abcdasaude.com.br/artigo.php?98> Acesso em: 26 junho 2012.
LOTTEN EYES. O que é catarata. Em: < http://www.lotteneyes.com.br/patologias-catarata/> Acesso em: 26 junho 2012.
LOWE, D. G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 60. p. 91–110. 2004.
LUNA, E. J. A. A epidemiologia do tracoma no Estado de São Paulo. 1993. Dissertação (Mestrado em Saúde Coletiva)- Programa de Pós Graduação em Saúde coletiva. Faculdade de Ciências Médica. Universidade Estadual de Campinas. Campinas, 1993.
MARGRAIN, T. H. Helping blind and partially sighted people to read: the effectiveness of low vision aids. British Journal of Ophthalmology. n.84. v.8.p. 919–921. 2000.
MARR, D. Active Perception: Advances in Computer Vision Series. v. 1.
MURRAY, D.; LITTLE, J. Using real-time stereo vision for mobile robot navigation.
Autonomous Robots. 2000.
NERI, M.C.; SOARES, W.L. Idade incapacidade e o numero de pessoas com Deficiência. R. bras. Est. Pop. Campinas. v. 21. n. 2. p. 303-321. 2004.
PELICIONI, M. C. F. e col.: Educação em saúde na prevenção, tratamento e controle do tracoma: Rev. Bras. Saúde Esc. v. 2.2o sem. 1992.
RABINER, L.; JUANG B. J.Fundamental of speech recognition. Prentice Hall. 2ed. 1994.
RADFAR, M.H. et al. A voice activated device for insulin dosage calculations for visually impaired diabetes, In: Electrical and Computer Engineering (CCECE), 2011. 24º Canadian Conference. p. 904 –907.
RESNIKOFF, S. et al. Global data on visual impairment in the year. 2002. Bulletin of the World Health Organization. v.82.p. 844 – 851.
SCOTT, I. U. et al. Quality of life of low-vision patients and the impact of low-vision services.
American Journal of Ophthalmology. n.128. v.1. p. 54 – 62.
SPERANDIO, C Mariana; SANTOS, E. Paulo. Interpretação de imagens de um robô móvel usando logica probabilística. Centro universitário da Fei. 2011.
TRUCCO, E.; VERRI A. Introductory Techniques for 3-D Computer Vision, Prentice Hall PTR, Upper Saddle River, NJ, USA. 1998.
VARELLA, Dráuzio. Glaucoma. Em: <http://drauziovarella.com.br/crianca-2/glaucoma/ > Acesso em 30 junho 2012.
WILLIS, S.; HELAL, S. Rfid information grid for blind navigation and wayfinding,
![Figura 2.3 Exemplo de uso de imagens integrais. Fonte: [Bay et al. 2006].](https://thumb-eu.123doks.com/thumbv2/123dok_br/15550091.94748/22.892.280.624.459.709/figura-exemplo-uso-imagens-integrais-fonte-bay-al.webp)
![Figura 3.1: Rastreamento de uma bola usando uma fóvea em movimento Fonte [Gomes 2008]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15550091.94748/32.892.281.651.296.595/figura-rastreamento-bola-usando-fóvea-movimento-fonte-gomes.webp)