SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP Data de Depósito: 20.09.2004
Assinatura:,jJna ^cuJ^ t ^ a ^ r ^ / o ^ ^ .
Imersões horo-justas de variedades
Marcelo Buosi
Orientadora: Profa. Dra. Maria Aparecida Soares Ruas
Tese apresentada ao Instituto de Ciências Matemáticas e de Computação - ICMC-USP, como parte dos requisitos para obtenção do título de Doutor em Ciências - Matemática.
A Comissão Julgadora:
Profa. Dra. Maria Aparecida Soares Ruas
Prof. Dr. Washington Luiz Marar
Profa. Dra. Sueli Irene Rodrigues Costa
Prof. Dr. Ruy Tojeiro de Figueiredo Júnior
Prof. Dr. Antonio Carlos Asperti
A Carolina e Sofia
com amor...
Ao professor
Agradecimentos
Agradeço cm primeiro lugar a Deus, que durante este período esteve sempre ao meu lado, dando força e saúde.
Agradeço a minha família: meus pais, Geraldo e Maria e meus irmãos, Renato c Greciane, por compreender, aprovar e incentivar minhas escolhas.
Agradeço a minha esposa Carolina pelo seu amor, exemplo de vida e pela sua com-preensão e companheirismo irrestritos. A nossa filha Sofia que está chegando e que já é motivo de muita alegria e sonhos.
Agradeço à Profa. Maria Aparecida Soares Ruas que num primeiro instante orientou-me para um Doutorado "Sandwich" e em seguida, após o indeferiorientou-mento da bolsa, conti-nuou a orientação no trabalho outrora começado. Sou grato também pela sua disposição, seus estímulos e pela infinita paciência com que conduziu este trabalho de orientação.
Agradeço ao Prof. Shyuichi Izumiya, inicialmente por ter aceitado orientar-me num projeto de Doutorado "Sandwich", por ter proposto o tema desta tese e, após o inde-ferimento da bolsa, ter passado duas semanas no Brasil, onde juntamente com a Profa. Maria Aparecida Soares Ruas, tivemos valiosas discussões.
Agradeço à Profa. Dirce Kiyomi Hayashida por ter me apresentado ao Prof. Shyuichi Izumiya e por tudo que tem feito por mim desde o meu mestrado.
Agradeço à Profa. Maria dei Carmen Romero Fuster pelas sugestões e pelas discussões que tivemos durante suas visitas ao Brasil.
Agradeço ainda aos meus amigos pela convivência e companheirismo nesta longa jor-nada. Dentre eles eu não poderia deixar de citar aqueles que nos momentos mais difíceis me adotaram como parte de suas famílias: Fábio (Mineiro) e Maurício (Luke).
Agradeço ao meu companheiro de luta, compadre e irmão Luiz Fernando, que embora distante se manteve presente.
Resumo
Neste trabalho estudamos as imersões horo-justas de variedades em espaços hiperbólicos. Uma aplicação / :zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA X —> Hm é horo-justa se para todo h-semi-espaço f) a inclusão de
/_ 1(f)) em X induz monomorfismo na hornologia de Cech. Estudamos a equivalência desta
definição com a propriedade que toda função altura horoesférica não-degenerada é perfeita. Introduzimos também o conceito de curvatura hiperbólica absoluta total para imersões em espaços hiperbólicos e mostramos que imersões horo-justas são imersões com curvatura hiperbólica absoluta total mínima e mostramos uma extensão parcial do Teorema de Chern-Lashof.
Uma questão importante consiste um entender se este conceito é equivalente à justeza em espaços hiperbólicos. Nossa contribuição 6 mostrar que a resposta 6 positiva quando a imersão está contida em certas variedades umbílicas. Para imersões de Sl em ií2, ou
aquelas contidas em variedades umbílicas de H3, mostramos que horo-justeza e justeza
Abstract
In this work we study horo-tight immersions of manifolds in hyperbolic spaces. A map / of a topological spacezyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA X into Hm is called horo-tight if for every h-half-space t) in Hm,
the induced homomorphism H^j"1) —> H,(X) in Cech homology is injective. We show
that this definition is equivalent to require that every non-degenerate horospherical height, function is polar. We also introduce the concept of total absolute hyperbolic curvature of immersions into hyperbolic spaces and show that horo-tightness corresponds to minimal total absolute hyperbolic curvature. A partial extension of the Chern-Lashof theorern is then proved in this context.
A key point is to understand whether horo-tightness implies tightness. In this direction we prove that this is the case for some umbilical immersions. In the case of immersions of Sl into H2 or umbilical immersions into H3 we also show that horo-tightness is equivalent
Sumário
Introdução 1
1 Imersões Justas em Espaços Euclidianos 5
1.1 Teoria de Pontos Críticos 5 1.1.1 Desigualdades de Morse 6 1.2 Curvatura Absoluta Total 8
1.3 Aplicações Justas 12 1.4 Superfícies Justas 15 1.5 Aplicações "Taut" 17
2 Geometria Hiperbólica 19 2.1 O Espaço de Lorcntz 19 2.2 O Espaço Hiperbólico 22
2.2.1 Três Classes de Funções 25
2.3 Projeção Estercográfica 27
3 Imersões Justas e "Taut" em Espaços Hiperbólicos 29
3.1 Aplicações e Imersões "Taut" emzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Hrn 29
3.2 Imersões Justas no Espaço Hiperbólico 31 3.2.1 Imersões Justas de Esferas 31 3.2.2 Um Limite para a Codimensão de Imersões Justas 33
3.3 Observações sobre as funções L/, 33
4.3 Imersões Horo-justas e Umbílicas 44
5 Imersões Horo-justas de S11 emzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Hm 47
5.1 Motivação e Lema Básico 47
5.2 Curvas em H2 48
5.3 Curvas em Hs 51
6 Curvatura Hiperbólica Absoluta Total 55 6.1 Geometria Hiperbólica Local de Hipersuperfícies 55
6.2 Geometria Hiperbólica Local de Subvariedades 59 6.2.1 Hipersuperfície Canal Hiperbólica 62 6.3 Curvatura Hiperbólica Absoluta Total 66
6.3.1 Principais Resultados 69
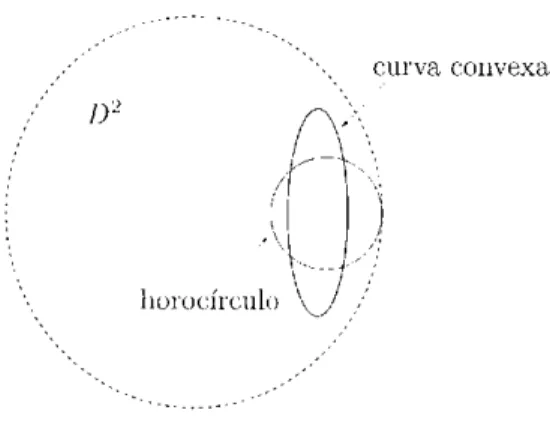
6.4 Horoconvexidade 70
A Programas utilizados no capítulo 5 73
Referências Bibliográficas 75
Introdução
As subvariedades justas e "taut" formam uma importante classe de variedades com pro-priedades especiais de curvatura, c que são estudadas intensivamente por geómetras desde os anos cinquenta. Ern alguns aspectos, essas variedades são as figuras mais simples de-pois dos corpos convexos: por exemplo, as subvariedades justas do espaço euclidiano são aquelas cujas intersecções com qualquer semi-espaço 6 conexa. Alguns exemplos são as esferas, as superfícies de Veronese, as hipersuperfícies isoparamctricas, e as ciclides de Dupin.
O conceito de imersão justa surgiu como uma generalização de imersões com curvatura absoluta total mínima. Esta última teve origem com o trabalho de W. Fenchcl em [17], no qual foi mostrado que a integral do módulo da curvatura de uma imersão / : S1 —• RJ,
denominadazyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA curvatura absoluta total e denotada por T(S] , / ) , é maior ou igual a 2n e que
este valor é atingido se, e somente se, a curva é plana e convexa. Na segunda metade da década de 40 este resultado foi generalizado para curvas em codimensão > 2 por K. Borsuk em [4].
Entretanto o resultado que realmente motivou o estudo de imersões justas foi o teorema de S. S. Chern e R. K. Lashof em [14], em que os autores generalizam os resultados de W. Fenchel e K. Borsuk para imersões de esferas em espaços euclidianos de qualquer codimensão: se / : SN — Rm é uma imersão então r(5", / ) ^ 2 e r(M, / ) — 2 somente se f mergulha Sn como uma hipersuperfície convexa em algum (n + l)-plano de IR™. Este
resultado é conhecido como Teorema de Chern-Lashof.
função de Morse definida emzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA M pode ter. Além disso, este limite inferior é atingido se, e somente se, toda função altura linear não-degenerada, definida em M, possui j(M) pon-tos críticos. Urna tal imersão é denominada imersão com curvatura absoluta total mínima ou imersão convexa, conforme Kuiper [24, 25]. No trabalho de T. F. Banchoff [1], tais imersões foram pela primeira vez denominadas imersões justas, "tight immersions".
Para uma variedade M em que 7(M) é igual à soma dos números de Betti de M com relação a um corpo F, Kuiper mostrou que a curvatura absoluta total mínima de uma imersão f : M —> IR"1 é equivalente a requerer que para todo semi-espaço fechado h em
Km, o homomorfismo induzido
é injetivo, conforme [25, 27]. Esta abordagem permite, por um lado, generalizar o estudo de imersões justas para a categoria dc aplicações contínuas cujos principais resultados são devidos a Kuiper, e por outro lado, permite caracterizar justeza de imersões em termos de funções perfeitas, como descrevemos a seguir.
Nos espaços euclidianos, há dois tipos de subvariedades umbílicas: os planos e as esferas. Cada uma delas pode ser obtida como conjunto de nível de uma função distância. Os planos são conjuntos de níveis de funções alturas lineares, tç(x) = {x,Ç), onde £ é um vetor unitário, e as esferas são conjuntos de níveis de funções quadrado da distância euclidiana, íp{x) = \\p — x\\2. Em [6] S. Cárter e A. West caracterizam imersões justas
como aquelas em que toda função de Morse do tipo iç é uma função perfeita, c imersões "taut" como aquelas cm que toda função dc Morse do tipo ív é uma função perfeita.
Em [11], T. E. Cecil e P. J. Ryan estendem para imersões no espaço hiperbólico o estudo
desenvolvido por S. Cárter e A. West em da seguinte maneira: comozyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA 110 espaço hiperbólico
há três tipos de subvariedades umbílicas, há também três famílias de funções distância, Lp, Lu, Lh, cujos conjuntos de níveis são as subvariedades umbílicas do espaço. As funções Lp(x), L^{x) e Lh(x) medem, respectivamente, o quadrado da distância hiperbólica entre
os pontos p e x, a distância hiperbólica entre o ponto x e o hiperplano ir e a distância hiperbólica entre x e a horoesfera h. Os autores estudam imersões em que toda função de Morse, de cada tipo, é uma função perfeita. Com relação às funções dos tipos L^, Lp
estão associados o conceitos de imersões justas e imersões "taut", respectivamente. T. E. Cecil e P. J. Ryan em [12], resumem os resultados conhecidos sobre imersões justas e "taut" em espaços hiperbólicos, que essencialmente estão contidos nos artigos
[7, 10, 11], e propõem algumas questões originais sobre o assunto.
Cecil e Ryan definem então que uma imersão / :zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA M —> Hm c horo-justa se toda Lh
não-degenerada é uma função perfeita. Eles observam que toda imersão justa e toda imersão "taut" de uma variedade compacta são imersões horo-justas, e além disso, em dimensão 2, horo-justeza coincide com a propriedade dos dois pedaços em relação a horoesferas. Estes são praticamente os únicos resultados conhecidos de imersões horo-justas. Eles também propõem o seguinte problema:
Estudar a classe das imersões horo-justas: em, particular, determinar as imersões horo-justas de Sn e caracterizar quais superfícies que admitem, imersão horo-justa em H3.
O objetivo deste trabalho é estudar imersões horo-justas. Uma aplicação / : X —> H"' é horo-justa se para, todo h-semi-espaço h a inclusão de f~l(h) em X induz monomorfismo
na homologia de Cech. Estudamos a equivalência desta definição com a propriedade que toda função altura horoesférica não-degenerada é perfeita. Introduzimos também o conceito de curvatura hiperbólica absoluta total para imersões em espaços hiperbólicos e mostramos que imersões horo-justas são imersões com curvatura hiperbólica absoluta total mínima.
Uma questão importante na teoria consiste em entender se este conceito é equivalente à justeza em espaços hiperbólicos. Nossa contribuição é mostrar que a resposta é positiva quando a imersão está contida em certas variedades umbílicas.
Nos capítulos 1, 2 e 3 recordamos resultados conhecidos sobre imersões justas em espaços euclidianos, geometria hiperbólica o imersões justas o "taut" em espaços hiper-bólicos, respectivamente. Os conceitos utilizados de geometria riemanniana podem sem encontrados em [5]. Para uma lista quase completa de referências sobre imersões justas, veja [21], Os resultados originais deste trabalho aparecem nos capítulos 4, 5 e 6.
No capítulo 5 estudamos as imersões horo-justas dezyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA S1 em Hm. Para imersões de S1
em H2, ou aquelas contidas em variedades umbílicas de H'\ mostramos que horo-justeza
e justeza são equivalentes.
O capítulo 6 trata da teoria local de subvariedades em espaços hiperbólicos. Inicial-mente, com base nos artigos de S. Izumiya e seus colaboradores [18, 19, 20], descrevemos os resultados sobre a geometria diferencial local de hipersuperfícies e subvariedades em eodimensão maior no espaço hiperbólico. Neste capítulo introduzimos o conceito de vatura hiperbólica absoluta total. Assim como no caso euclidiano, mostramos que cur-vatura hiperbólica absoluta total mínima e horo-justeza são equivalentes e provamos urna extensão parcial do Teorema de Chern-Lashof.
Capítulo 1
Imersões Justas em Espaços
Euclidianos
O objetivo deste capítulo ó introduzir os conceitos de aplicação e imersão justas em espaços
euclidianos e descrever alguns resultados importantes da teoria.
Inicialmente apresentamos a terminologia básica da teoria de pontos críticos assim
como alguns resultados que serão necessários neste trabalho. As principais referências são
[12, 30, 31, 35].
Em seguida, apresentamos o Teorema de Chern-Lashof sobre curvatura absoluta total
e introduzimos o conceito de justeza estabelecido por Kuiper em [25]. Discutimos a
equivalência entre imersões com curvatura absoluta total mínima e imersões justas, que
por sua vez c equivalente a exigir que toda função altura não-degenerada c uma função zyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA
Z2-perfeita.
Na seção 1.4 são apresentados os principais resultados da teoria para o caso de
varie-dades bidimensionais e na última seção introduzimos o conceito de aplicação "taut".
1.1 Teoria de Pontos Críticos
Sejam Mi, M2 variedades diferenciáveis e / : Mi —> M2 uma aplicação diferenciável. Um
pontozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA x 6 Mi é chamado de ponto crítico de f se a Jacobiana /* em x é singular (não
possui posto máximo). Um ponto y <G M2 ó um valor crítico de f se algum x € .f~x(y) é
um ponto crítico de / , os demais pontos dc M2 são chamados valores regulares de f.
p o n t o c r í t i c o e mzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA x G M é e q u i va le n t e a d ize r q u e (/?* = 0 e m x. E m u m s i s t e m a d e c o o r d e n a d a s ( 1/ 4 , . . . ,un) n u m a v i z i n h a n ç a d e x, is t o s i gn i fi ca q u e
dip(x) _ __ dip(x) _
é não-singular. Esta matriz é denominada a Hessiana de p em x e será denotada por Hessx {ip). O índice de <p em um ponto crítico não-degenerado x G M é o número de
autovalores negativos da Hessx (</?).
O comportamento de p numa vizinhança de um ponto crítico não-degenerado é com-pletamente determinado pelo seu índice.
Lema 1.1 (Lema de Morse) Seja x G M " um ponto crítico não-degenerado de índice
A da função p : M —> ]R. Então existe um sistema de coordenadas locais . . . , un cm uma vizinhança U de x com u,;{x) = 0, (i — 1,..., n), tal que
Demonstração: Veja [35], Teorema 2.2.5, pg. 144.
Portanto um ponto crítico de índice A é um máximo local de p se A = n, um mínimo local se A = 0, e os demais valores de A correspondem a diferentes tipos de pontos de sela. Note também que os pontos críticos não-degencrados são isolados.
Uma função p : M —> IR que tem somente pontos críticos não-degenerados é chamada de função de Morse ou função não-degenerada. Se M é compacta então toda função de Morse possui apenas um número finito de pontos críticos.
du
Dizemos que um ponto crítico x € M é não-degenerado se a matriz
p{u) — p(x) — u u\ + u\+l + • • • + u2n. para todo u G U.
1.1.1 Desigualdades de Morse
Seja p : M R uma função de Morse tal que o conjunto
Mr(p) = {x G M | <p(x) sí r }
é compacto para todo r G R. Isto é sempre verdade se M for compacta. Seja Hk(<p, r) o
número de pontos críticos de p de índice k em Mr(p). Para M compacta, seja Hk(f) 0
número de pontos críticos dezyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA tp de índice k em M, e /.i(p) o número de pontos críticos de p. Para um corpo F, seja
fh:(p, T, F) - dimp{Hk(Mr(<p); F))
o k-ésimo número de Betti de Mr(ip) em relação ao corpo F, c seja j3k(M, F) o fc-ésimo
número de Betti de M em relação ao corpo F. As desigualdades de Morse afirmam que
(1-1) M<P,r) > Pk(<P,r,F)
para todotsronmliedbaUSPOFC F,yutsrqpomlkjihgfedcbaVSRPMJHDCBA r, k. Para uma demonstração das desigualdades de Morse, veja [35],
Pro-posição 2.7.1, pg 159. Se M c compacta, definimos o número de Morse de M, 7(Aí), por
7(M) = min{//(</?) | Lp é uma função de Morse em M}. As desigualdades de Morse implicam que
n
7( M ) ^ / ? ( M ; F ) = ] £ / ?f c( M ; F ) k=0
para todo F.
A seguir apresentamos uma condição necessária e suficiente para que as desigualdades de Morse tornem-se igualdades.
Teorema 1.2 Seja ip : M ^ R, uma função de Morse tal que Mr(p) é compacto para todo rzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA G R. Então , para um, corpo arbitrário F. as seguintes condições são equivalentes:
(i) /ífc(</?,r) = Pk^pjV, F) para todo k E 2 c todo r 6 R. (ii) A aplicação em homologia
H>(Mr(<p)-F) H,(M-,F)
induzida pela inclusão de Mr(p) em M é injetiva para todo r 6 R.
Este resultado, cuja demonstração requer um estudo mais detalhado da teoria de pontos críticos, segue do Teorema 2.2 de [31], e foi primeiramente ressaltado 110 contexto
de imersões justas por Kuiper em [25].
Definição 1.3 Uma função de Morse p> : M —> R tal que Mr(p>) e compacto para todo r G R e que satisfaz uma (e portanto ambas) das condições do Teorema 1.2, com relação
a um corpo F, c denominada uma função F-perfeita. Dizemos simplesmente que p é
perfeita quando <p for perfeita para algum, corpo F.
1.2 Curvatura Absoluta Total
Nesta seção estudamos a teoria de curvatura absoluta total de imersões em espaços eu-clidianos. Este estudo foi iniciado por S. S. Chern e R. K. Lashof nos artigos [14, 15].
Sejam / :zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Mn —• Rm, m — n + k, uma imersão diferenciável e S™"1 a esfera unitária
de ETO. Para £ e 5"""1, a função altura linear ^ : Rm —• R é definida por
onde (Ç,q) é o produto interno euclidiano. A restrição de ^ a M, definida por = {£, f(x)} é uma função real definida em M.
Recordemos alguns fatos fundamentais sobre subvariedades de espaços euclidianos. Como / é uma imersão, segue que / é um mergulho numa vizinhança conveniente de qualquer ponto xzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA G M. Para cálculos locais, podemos então identificar TXM e f*(TxM).
Sejam X G TXM e £ um campo de vetores unitários normais a f(M) numa vizinhança de x. Seja D a derivada covariante euclidiana em R"'. Temos a seguinte equação
DXS, = -AçX + V ^ ,
onde — AçX é a componente de Dxt, tangente a M, e é a componente normal a M.
O operador linear Aç c denominado a segunda forma fundamental de / na direção e V1 é chamada a conexão normal.
Seja BM o librado normal unitário de M. BM 6 uma variedade de dimensão m — 1. Seja 7r : BM —> M a projeção natural. A aplicação de Gauss
(1.2) u-.BM —> Sm-1
le va o p o n t o E, G M a o ve t o r p a r a le lo a £ n a o r i ge m .
Teorema IA A nulidade da aplicação de Gauss u no ponto £ G BM é igual a nulidade de Aç. Em particular, £ e um ponto crítico de v se, e somente se, é singular.
Demonstração: Ver [12, Teorema 1.3.1].
Examinemos a teoria de pontos críticos das funções alturas lineares.
Teorema 1.5 Sejam f : M —• Rm uma imersão e p G .
(i) £p tem um ponto crítico em x G M se, e somente se, p é ortogonal a TXM.
(i)zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Seja x um ponto crítico de íp. Então para X,y G TXM, a Hessiana de £p rio ponto x satisfaz
Hess x{Zp){X,y) = (ApX,y).
Demonstração: Ver [12], Teorema 3.2, pg 10.
Os seguintes resultados são consequências diretas do Teorema 1.5.
Corolário 1.6 Seja p G TXM. Então
(i) íp tem um ponto crítico degenerado no ponto x se, e somente se, Ap é singular.
(ii) Se x é um ponto crítico não-degenerado de £p, então o índice de lv em x é igual ao número dc autovalores negativos de Ap.
Dos Teorema 1.4 e Corolário 1.6 segue-se o seguinte resultado.
Teorema 1.7 Para p G S,n~l, £p é uma função de Morse se, e somente se, p é um valor regular da aplicação de Gauss v.
Como BM e S"l~x são variedades de mesma dimensão, segue do Teorema de Sard o
seguinte resultado:
Corolário 1.8
(i) Para quase todo p G Sm~l, £p é uma função de Morse.
(ii) Seja x G M um ponto crítico não-degenerado de índice j da função íp. Então existe uma função de Morse £q com um ponto crítico y G M de índice j, onde q e y podem ser escolhidos arbitrariamente próximos de p e x, respectivamente.
Retornamos agora à questão da curvatura absoluta total. Para um valor regular £ da aplicação de Gauss v, seja //(£) o número de pontos críticos da função de Morse O ponto £ tem uma vizinhança U tal que U) é a união disjunta dos conjuntos abertos e conexos V , , . . . , Vk, k = /i(£), nos quais v : V, —> U é um difeomorfismo. A curvatura de Lipschitz-Killvrig 0 em BM é definida pela equação
ondezyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA da é o elemento de volume de Sm 1 normalizado de tal maneira que
/ da = 1, Js™-1
e d A é o elemento de volume de BM. Portanto em Vi temos
/ 0 dA = / da, se <25 > 0 em V, 'Vi Ju
/ & dA = - da, se (55 < 0 em K: JVi Ju
Ou seja,
(1.3) / |0|(M= / da.
JVÍ Ju
Seja C o conjunto de medida nula constituído dos valores críticos de u. A função //(£) é localmente contínua e portanto contínua em S*"1-1 — C. A curvai,ura absoluta total ou a
área de 5"'"1 coberta pela imagem da aplicação de Gauss é
(1.4) r(MJ)= [ fí(Oda.
JS"'-L-C
Por outro lado, da equação (1.3) e da discussão que a precede, e da teoria de integração, vemos que
[i(()da= / |<S|dA
C J BM
JS">-1 -c
Portanto, o estudo da curvatura absoluta total pode ser formulado em termos da função
Como toda função de Morse ^ : M —> R satisfaz /x(£) ^ T(M), onde j(M) é o número de Morse de M, temos
t(MJ)zyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA ^ 7 ( M ) .
Embora o seguinte resultado tenha sido descoberto por Kuiper em [22], somente com um resultado de J. P. Wilson em [37] é que foi possível demonstrá-lo.
Teorema 1.9 Seja M urna variedade compacta. Então
7( M ) = inf{r(M, / ) | / : M —• Rm e imersão}.
Como 7(Aí) é a maior cota inferior para r(M, / ) , temos a seguinte definição.
Definição 1.10zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Uma 'imersa,o f : M —> Rm tem curvatura absoluta total mínima se
r(M,f)= 7(M).
O próximo teorema fornece uma condição equivalente para que uma imersão / : Aí —> E,?n tenha curvatura absoluta total mínima.
Teorema 1.11 Uma imersão f : Aí —> IR™ tem curvatura absoluta total mínima se, e somente se, toda, função altura não-degenerada possui 7(Aí) pontos críticos.
Demonstração: Se toda £^ de Morse temzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA 7(AÍ) pontos críticos então, por (1.4), r(AÍ, f ) =
7(Aí). Reciprocamente, se //(£) > 7'(Aí) para alguma de Morse, então p > 7(Aí) em um conjunto de medida positiva pois p, c constante numa vizinhança U de £ em S"1 - 1.
Como /i > 7(M) em g"' "1 - Q segue que r(AÍ,/) > 7(AÍ), uma contradição.
Os exemplos mais simples de subvariedades com curvatura absoluta total mínima são as hipersuperfícies convexas, aquelas que são o bordo de um conjunto convexo B de algum espaço euclidiano. Um conjunto B é convexo se para quaisquer p, q E B o segmento de reta pq está contido em B. Mais precisamente, tem-se o seguinte resultado.
Proposição 1.12 Seja f : Sn —> R"+ 1 uma imersão. Se f(Sn) ê urna hipersuperfície convexa então r(Sn, f) = 2. Em outros termos, f mergulha Sn com curvatura absoluta total mínima.
Demonstração: Veja [12], Teorema 4.8, pg 20.
A recíproca da proposição acima é um resulado bem mais profundo e é devido a S. S. Chern e R. K. Lashof [14], Encerramos esta seção com um dos mais significativos teoremas sobre curvatura absoluta total de imersões cm espaços euclidianos, a saber, o Teorema de Chern-Lashof.
Teorema 1.13 (Chern-Lashof) Seja f : Mn —> Rm uma imersão de uma variedade fechada. Então:
(i) r ( M , / ) > 2 .
(ii) se T(AÍ, / ) < 3 então Aí é homeornorfa à esfera Sn.
Demonstração: ComozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA M é compacta, para todo £zyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA G - C, tem pelo menos dois
pontos críticos e assim //(£) ^ 2. Portanto, por (1.4), r(M, / ) ^ 2, o que prova (i). Sc r(M, / ) < 3 então /x(0 = 2 para algum £ G S™"1 - C e portanto ^ á uma função de
Morse com apenas dois pontos críticos. A prova de (ii) segue então do Teorema de Reeb, veja [30], Teorema 4.1, pg 25. O caso (iii) segue do Lema 1.14 abaixo.
O seguinte lema contém a parte mais importante do teorema de Chern-Lashof.
Lema 1.14 Seja f : Mn —• Rw+P urna imersão. Se toda função altura não-degenerada : M —>• R,£ G 5n + p - 1, possui exatamente dois pontos críticos, então f é um mergulho. f(M) está contida em um (n + 1 )-subespaço afim A de R"'+?J e É o bordo, em A, de um conjunto aberto, convexo e limitado de A.
Demonstração: Veja [35], Lema 3.4.2, pg 180.
Observação 1.15 O Teorema de Chern-Lashof generaliza resultados antigos sobre imer-sões com curvatura absoluta total mínima: Em 1929, no artigo [17], Fenchel provou que se f : S1 —» R3 é uma imersão então T(S1,J') atinge o mínimo valor possível, 2IR, se,
e somente se, f mergulha SL como uma curva plana e convexa. A prova do teorema
de Fenchel pode ser encontrada em [13]. O mesmo resultado vale para curvas em Rm, conforme
[4]-1.3 Aplicações Justas
A teoria de imersões com curvatura absoluta total mínima, após o trabalho de Chern e Lashof em [14], foi reformulada e desenvolvida. Como esta noção é uma generalização de convexidade, Kuiper em [24, 25] chamava tais imersões de imersões convexas. O termo justa, "tight" em inglês, foi utilizado pela primeira vez em [1] por Banchoff. Em [25] Kuiper formulou o conceito de justeza em termos de intersecções com semi-espaços e injetividade em homologia de aplicações induzidas. Ele observou que sua formulação é equivalente à curvatura absoluta total mínima para variedades que satisfazem
(1.5) 7( M ) = / ? ( M ; F )
para algum corpo F.
Kuiper também observou que toda variedade bidimensional satisfaz (1.5) com F = Z2.
SejazyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA M uma variedade compacta cujo número de Morse 7(M) é igual a soma dos números de Betti /?(M, Z2) e seja / : M —> Rm uma imersão com curvatura absoluta
total mínima. Se o hiperplano 7r é uma superfície de nível de uma função altura linear não-degenerada eh é um semi-espaço fechado determinado por ir, então pelo Teorema 1.2 a aplicação
H*(f~l{h)) —• H.(M) (Z2 - homologia)
é injetiva. Isto motiva a seguinte a definição de justeza, veja Kuiper [27].
Definição 1.16 Uma aplicação f : X —> Rm de um espaço topológico compacto X no espaço euclidiano Rm é justa se para todo semi-espaço fechado h em R'm, o homomorfismo induzido por inclusão
H^f-\hy,Z2) —>Ht(M]Z2)
na homologia de Cech é monomorfismo. Um subconjunto U de Rm é justo se a inclusão natural i : U —> Rm é justa.
A definição acima estende a noção de justeza para a categoria de aplicações contínuas / : .Y —> R'n de espaços topológicos compactos. O uso da homologia dc Cech é motivado
pela sua propriedade de continuidade que é necessária para eliminar a hipótese de que o semi-espaço h seja determinado por uma função altura não-degenerada. Ressaltamos que para espaços triangularizáveis e portanto para variedades diferenciáveis, a homologia de Cech coincide com a homologia singular.
Observação 1.17 Justeza é uma propriedade projetiva e projeções ortogonais de aplica-ções justas são justas. Veja [12], Observaaplica-ções 5.2(b) e 5.2(c), pg 23.
Para uso posterior incluímos a seguinte:
Proposição 1.18 Projeções ortogonais de aplicações justas são justas.
Demonstração: Seja f : X R"' uma aplicação justa e $ : Rm —> Rfc uma projeção
ortogonal, então í> o / : X —> Rfe é justa. De fato, seja h o semi-espaço fechado em Rfe
determinado por ív 7' r, pzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA G Rfc. A mesma inequação em R1" determina um semi-espaço h' em Rm tal que Q-^h) = h'. Portanto ($ o f)~\h) = e a justeza de $ o /
inclusão, entãozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA i o f \ X Rm + f c é justa. Basta notar que se h é um semi-espaço em e h, = hn então 0 /)-i(/i) = f~l(tí).
A seguir estabelecemos o principal resultado desta seção que é devido a Kuiper, veja
[27]-Teorema 1.19 Uma imersão f : M —> Rm de uma variedade fechada é justa se, e semente se, j(M) = /?(AÍ;Z2) e f tem curvatura absoluta total mínima.
Demonstração: Se f é justa e ip é uma função altura não-degenerada então, pelo
Teo-rema 1.2, íp possui exatarnente /V(M; Z2) pontos críticos. Portanto $(Aí;Z2) ^ j ( M ) e r(MJ) = ft(M; Z2). Por outro lado, pelas desigualdades de Morse, j(M) ^ ft(M;Z2) e
assim T(M, f ) = ou seja, / tem curvatura absoluta total mínima.
Reciprocamente, se / tem curvatura absoluta total mínima e y(M) = 0(M\ Z2) então,
pelos Teoremas 1.11 e 1.2, para todo semi-espaço h determinado por qualquer função altura não-degenerada tem-se injetividade no homomorfismo induzido
(1.6) H*(f-l{h)-Z2) —> H*(M\ Z2).
Se f~l(h) = Mr(p) para alguma função altura degenerada ip e para algum r 6 R, então
devemos mostrar que o homomorfismo induzido em homologia é ainda injetivo. O con-junto Mr(p) pode ser aproximado por conjuntos da forma f~l{hi) onde cada h{ é um
semi-espaço determinado por uma função de Morse e que satisfaz 1.6. Em seguida, pela continuidade da homologia de Cech, mostra-se que Mr(p) também satisfaz 1.6, o que
conclui a demonstração.
Durante algum tempo todo exemplo conhecido de imersão / : M —> Rm com curvatura
absoluta total mínima satisfazia j(M) = f3(M; Z2), veja [27]. Entretanto, em [28], Kuiper
e Meeks encontraram, para cada m ^ 4, uma hipersuperfície M em Rm + 1 com curvatura
absoluta total mínima r = 12 e 6(M; Z-2) = 8.
Analisando a demonstração do teorema anterior temos como consequência o seguinte corolário.
Corolário 1.20 Seja f : M — R " ' uma imersão de uma variedade fechada. Então são equivalentes:
(i) / é justa.
(ii)zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Toda não-degenerada, £ G Sm \ é urna função ^-perfeita.
(iii) Toda não-degenerada, £ G Sm~l, possui 7( M ) = (J(M, Z2) pontos críticos.
O corolário acima explica porque muitas vezes, na literatura, se diz que uma imersão é justa quando toda função altura de Morse possui o número mínimo de pontos críticos (permitido pelas desigualdades de Morse). Este resultado também possibilita uma nova definição de justeza.
Definição 1.21 Uma imersão f : M Rm é justa se toda de Morse é uma função perfeita.
Observe-se que, se / : M —• Rm é uma imersão justa, 110 sentido da definição 1.21,
então M é compacta. Nesta linha de pesquisa indicamos o artigo [6]. Observamos também que nos restringiremos à primeira definição de justeza, Definição 1.16.
1.4 Superfícies Justas
Nesta seção apresentamos sucintamente alguns dos principais resultados sobre superfícies (variedades de dimensão 2) justas.
A seguinte definição desempenha papel importante no estudo de superfícies justas e foi introduzida por T. F. Banchoff em [1],
Definição 1.22 Urna aplicação / : X —> R"\ onde X é um espaço topológico conexo, tem, a propriedade dos dois pedadços (PDP) se f~l{h) é conexo para todo semi-espaço fechado h em Rm.
O seguinte teorema caracteriza as superfícies justas cm R"\
Teorema 1.23 Sejam M2 urna variedade fechada e f : M —> R! urna imersão. As seguintes afirmações são equivalentes:
(i) / é justa.
(ii) / tem a PDP.
(iv) ^zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA fM \K\ d,A = 4 — x(M), onde K é a curvatura gaussiana de Aí, dA é o elemento de área de Aí e x{M) é a característica de Euler de Aí.
(v) ~ JM \K\dA = 7(Aí), onde 7(Aí) e o número de Morse de M.
Demonstração: Ver [3, pg 57].
Sobre a existência de imersões justas para variedades bidimensionais, tem-se o seguinte resultado:
Teorema 1.24 Seja M2 urna variedade fechada c conexa. Se M é orientável ou se M não é orientável e satisfaz x{M) ^ —2, então existe uma imersão justa f : M R3. Por outro lado, não existe imersão justa de M em, R3 se M for o plano projetivo, a garrafa de Klein ou satisfaz x(M) = —1.
Demonstração: Ver [3], Teoremas 1.3.3 e 1.3.7, pg 67 e 70, respectivamente.
Os demais casos ainda são problemas em aberto, veja [3, pg 70], onde também são propostas várias questões originais sobre superfícies justas.
Quando se consideram imersões de codimensão maior do que 1, a seguinte definição é importante no contexto de imersões justas.
Definição 1.25 Um,a aplicação f : X —> Rm é substancial se a imagem f(X) não está
contida em, nenhum, hiperplano de Rm.
O principal resultado sobre imersões PDP e substanciais é o seguinte teorema de Kuiper que estabelece um limite superior para a codimensão destas imersões e que este limite só pode ser atingido para imersões de variedades de Veronese.
Teorema 1.26 Sejam Mn uma variedade fechada e f : Aí —> R,"' uma imersão PDP e substancial. Então m ^ nin + 3)/2. Se n = 2 então m = n{n + 3)/2 somente se M for uma variedade Veronese.
Demonstração: Ver [12], Teorema 5.18, pg 33 para a primeira parte e [3], Teorema 1.3.6, pg 69, para a segunda parte.
A segunda parte do teorema acima também é verdadeira para n > 2 e foi provada por J. A. Little e W. F. Pohl em [29],
1.5 Aplicações "Taut"
Encerramos este capítulo com o conceito de aplicação "taut". Em [2], T. F. Banchoff iniciou o estudo de imersões "taut" ao tentar encontrar todas as superfícies justas contidas na esfera euclidianazyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA S'n em Rm + 1.
Definição 1.27 Seja X um espaço topológico compacto. Uma aplicação f : X —> Rm é denominada "taut" se para toda bola fechada, todo complemento de bola aberta, ou semi-espaço fechado Í1 em Rm ; o homomorfismo induzido
na homologia de Cech c injetwo.
Uma consequência imediata da definição acima e da definição de justeza é o seguinte teorema:
Teorema 1.28 Toda aplicação "taut" de X em Rm é justa.
Eni seguida observamos que uma aplicação justa e esférica é "taut".
Teorema 1.29 Seja f : X —• Rm uma aplicação esférica, isto é, f(X) está contida em alguma esfera euclidiana. Então f é justa somente se f é "taut".
Demonstração: Seja Q uma bola fechada ou o complemento de uma bola aberta cm Rm.
Então nonlecaZSMH n Sm = h n Srn para algum semi-espaço fechado h em Rm. Como f{X) C Sm,
tem-se
r1 ^ ) = r\n n sm) = r\h n sm) = r\h).
Como / é justa segue que a aplicação (/?,); Z2) —> H*(X; Z2) é injetiva e portanto
/ é "taut".
As imersões "taut" assim como as imersões justas também são caracterizadas em termos de funções perfeitas. Seja f : M —> Rm uma imersão. Para p e R"\ a função
quadrado da distância euclidiana é definida em R"1 por
-Teorema 1.30zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Seja f : M —> Rm uma imersão de um,a variedade fechada. Então são equivalentes:
(i) / é "taut".
(ii) Toda, íp não-degenerada, pzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA G R"\ é um,a função Z2-perfeita.
(iii) Toda íp de Morse, p G Rm, possui 7 ( M ) = (3(M, Z2) pontos críticos.
Demonstração: Ver [12], Teorema 1.12 e Corolário 1.13, pg 118.
Tem-sc também que toda imersão "taut/' é um mergulho. Para uma demonstração deste resultado, assim como maiores detalhes sobre imersões "taut", veja [12, Teorema 2.1.23] ou o artigo [6] onde os autores generalizam o conceito de imersões "taut" para variedades não-compactas.
Capítulo 2
Geometria Hiperbólica
Neste capítulo introduzimos conceitos e resultados básicos da geometria hiperbólica. São
definidos o espaço de Lorentz, as transformações de Lorentz, o espaço hiperbólicozyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Hrn
e urna métrica em Hm. Em especial definimos três classes de funções distância cujas
superfícies de nível são as hipersuperfícies umbílicas de Hm. As principais referências são
[10] e [33, capítulo 3] em que o presente capítulo foi baseado.
2.1 O Espaço de Lorentz
Sejam x = (XQ,.T[,. . . ,xm) e y = (yQ, y{,. . . ,ym) vetores de Rm + 1 com m > 0. O produto
interno de Lorentz de x e y é definido por
b(x, y) = ~xQyQ + xiijx H h xmyrn.
O espaço vetorial Rm + 1 munido do produto interno de Lorentz recebe o nome de espaço
de Lorentz (de dimensão m, + 1) e é denotado por K,"l+1.
A norma lorentziana de um vetor x em R™+1 é dada pelo número complexo
||.x|| = \/b(x, x).
Aqui ||.T|| é positivo, zero, ou imaginário. Se ||.T|| C imaginário, denotamos seu valor
absoluto (módulo) por |||.x||[.
A distância de Lorentz entre os vetores xey em R™+1 é definida pelo número complexo
(k{-i',y) = ||a--
-y\\-Note que dL(x, y) é positivo, zero, ou imaginário. O conjunto de todos os x em R"1+1 tais
cone de luzzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA de E™+1. Se x / Oe ||.xj[ = 0 então x é tipo-luz. Urri vetor tipo-luz 6 positivo
(resp. negativo) se :c0 > 0 (resp. x0 < 0). O conjunto dos vetores tipo-luz positivos é
denotado por LC* e é denominado cone de luz futuro. A esfera de luz S*" 1 é o conjunto
dos pontos xzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA G LC*+ tais que x0 = 1.
Se ||.x|| > 0 então x c tipo-espaço. Assim x c tipo-espaço se, e somente se, suas coordenadas satisfazem a inequação XQ < xj + • • • + x2rn.
O exterior de LC cm R'"+ 1 6 o aberto de K™+1 consistindo de todos os vetores
tipo-espaço.
Se ||z|| o imaginário então x c tipo-tem/po. Assim x c tipo-tempo so, o somente se, suas coordenadas satisfazem a inequação XyutsrqpomlkjihgfedcbaVSRPMJHDCBAq > x\ + ... + x2m.
Um vetor tipo-tempo é positivo (resp. negativo) se x-0 > 0 (resp. x0 < 0). O interior
de LC em R™+1 é o aberto de R™+1 consistindo de todos os vetores tipo-tempo.
Proposição 2.1 Se x e y são vetores tipo-tempo positivos (resp. negativos) de R"l + 1 e t > 0 então
(i) o vetor tx é tipo-tempo positivo (resp. negativo);
(ii) o vetor x + y é tipo-tempo positivo (resp. negativo).
Corolário 2.2 O conjunto dos vetores tipo-tempo positivo (resp. negativo) é um subcon-junto convexo de R"t + 1.
Tranformações de Lorentz
Definição 2.3 Uma função ([> : R", + 1 —>• W(l+1 é urna transformação de Lorentz se
b(f,6(:/;), è{y)) = b(x,y), para todo x, y em R"l + 1.
Uma base {r>0, v\, • • • , vm) de R"'+ 1 ó Lorentz ortonorrnal se b(vo, "o) = —1 e b(vl, v7) = ôij caso contrário. Note que a base canónica {e0, e1,... ,em} de Rm + 1 é Lorentz
ortonor-rnal.
Teorema 2.4 Uma funçãof (f> : K"l+1 —> R"'+ 1 e uma transformação de Lorentz se. e somente se, (p é linear e (0(eo), <j>{e{)...., ó(em)} é uma base Lorentz ortonorrnal de R'™4"1.
A matriz real ^4(m+i)x(m+i) ézyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA lorentziana se a transformação linear associada A :
R,m.+1 definida por A(x) = AT, for lorentziana. O conjunto de todas as matrizes
(m +1) x (m +1) Lorentzianas equipado com a multiplicação de matrizes forma um grupo 0(1, m), chamado o grupo de Lorentz das matrizes (m + 1) x (m + 1). Pelo Teorema 2.4, o grupo 0(1, m) é naturalmente isomorfo ao grupo das transformações de Lorentz de R™+1.
O seguinte teorema segue diretamente do Teorema 2.4.
Teorema 2.5 Seja A uma matriz (rn + 1 ) x (m + 1) com coeficientes reais. Então são equivalentes:
(i) A matriz A é lorentziana.
(ii) As colunas de A formam uma base Lorentz ortonormal de R"'+ 1.
(iii) A matriz A satisfaz a equação AlJA = J, sendo que J é a matriz que se obtém da matriz identidade multiplicando-se a primeira linha por — 1.
(iv) A matriz A satisfaz a equação AJA1 - J.
(v) As linhas de A formam uma base Lorentz ortonormal de R"í + 1.
Pelo Corolário 2.2, o conjunto dos vetores tipo-tempo de R™+1 tem duas componentes
conexas, o conjunto dos vetores tipo-tempo positivos e o conjunto dos vetores tipo-tempo negativos. Uma matriz lorentziana A é positiva (resp. negativa) se A transforma vetores tipo-tempo positivos (resp. negativos) em vetores tipo-tempo positivos (resp. negativos). Por exemplo, a matriz J é negativa. Por continuidade, uma matriz lorentziana é positiva ou negativa.
Seja PO(1,TO) O conjunto de todas as matrizes positivas de 0(1,m). Então PO(l,m) é um subgrupo dc índice dois de 0(1, m). O grupo P O ( l , m ) é chamado o grupo de Lorentz positivo.
Definição 2.6 Dois vetores x,y em R'"+ 1 são Lorentz ortogonais se b(x,y) = 0.
Teorema 2.7 Sejam x,y vetores não-nulos e Lorentz ortogonais em R"l + 1- Se x é tipo-tempo então y é tipo-espaço.
(i)zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA tipo-tempo se V contém um, vetor tipo-tempo,
(ii) tipo-espaço se todo vetor não-mdo em, V é tvpo-espaço,
(iii) tipo-luz se todo vetor não-nulo de V é um vetor tipo-luz ou, tipo-espaço.
E conveniente classificar os hipcrplanos cie R"l + 1. Seja
HP(v,c) = {xonlecaZSMH e R7t+1 t b(;x,v) = c}
o hiperplano Lorentz ortogonal à v. Em analogia com a definição anterior temos que, HP(v, c) é um hiperplano tipo-tempo, tvpo-espaço ou tipo-luz se v for espaço, tipo-tempo ou tipo-luz, respectivamente. As hipersuperfícies umbílicas de Hm são dadas pelas
interseções H"' Pi HP(v,c). A hipersuperfície H"1 n HP(v,c) 6 denominada hiperesfera, hiperplano (hiperplano equidistante) ou hiperhoroesfera se v for tipo-tempo, tipo-espaço e c = 0 (tipo-espaço e c / 0 ) ou tipo-luz, respectivamente.
Os seguintes resultados são importantes na demonstração do Teorema 2.15.
Teorema 2.9 Para cada dimensão n, a ação natural de PO(l,m) no conjunto dos n-subespaços vetoriais tipo-tempo deR 1 R " '+ 1 é transitiva.
Teorema 2.10 Sejam, x,y vetores tipo-tempo positivos (resp. negativos) em R"7'+1. Então b(x,y) ^ ||x||||y|| e a igualdade ocorre se, e somente se, x ey são linearmente dependentes.
O Angulo Tipo-Tempo entre Vetores Tipo-Tempo
Sejam x e y vetores tipo-tempo positivos (negativos) de E"l + I. Pelo teorema 2.10, existe
um único número real não-negativo r](x,y) tal que
b(x,y) = ||x|| ||y|| cosh(r/(x, y))
O ângulo tipo-tempo lorentziano entre x e y é definido por rj(x,y). Note que r)(x, y) = 0 se, e somente se, x, = Xy com A > 0.
2.2 O Espaço Hiperbólico
O produto interno de Lorentz induz na variedade
Hm = {xe R f+ 1 | b(x,x) = - 1 e x0 > 0} J
uma métrica riemanniana e assimzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA H"' é uma variedade riemanniana de curvatura seccional constante —1. Hm é denominado o espaço hiperbólico.
Sejam x,y vetores em Hm e seja rj(x.y) o ângulo tipo-tempo lorentziano entre x e y.
A distância hiperbólica entre x e y é definida pelo número real
dH(x,y) = rj(x, y).
Como b(x,y) = ||.x|| ||y|| cosh(r/(x, y)), temos a equação
cosi i(dH(x,y)) = -b(x,y).
Provaremos que dfi é uma métrica em tí'n, mas antes precisamos de alguns resultados
preliminares sobre produtos vetoriais em R3.
Produto Vetorial Lorentziano
Sejam x, y vetores em R3 e seja
/ _ 1 o 0 ^ J =
\
0 1 o 0 0 1
/
O produto vetorial lorentziano de x e y é definido porx A y = J(x x y),
onde x x y indica o produto vetorial usual. Observe que
b(z, x A y) = b(x, J(x x y)) = (x, x X y) = 0, b{y, x A y) = b(y, J(x x y)) = (y, x x y) = 0. Portanto x A y é Lorentz ortogonal a x e y.
Lema 2.11 Se x e y são vetores em R3 então x A y — J(x) x J(y).
Teorema 2.12 Se w,x,y,z são vetores em. R3 então
(i) x A y = —y A x,
(ii) b((xA y),z) =
(iii)zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA x A (y A z) — b(x, y)z - b(z, x)y
( iv)zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA b((.x A y), z A w) =
b(x,w) b(x,,
b {y,w) b(y,.
Corolário 2.13 Se x,y são vetores tipo-tempo positivos (resp. negativos) de Rf, então x A y é tipo-espaço e \\x A y\\ = — | | .x| | | | j/ j| sen h (r / (x, y)).
Corolário 2.14 Se x e y são vetores tipo-espaço de R"5 então
(i) | b(.T,y)| < ||x'|| Hí/K ^ x A y é tipo-tempo,
(ii) | b(x, y)\ = ||.t|| ||yj| ^ x Ay é tipo-luz,
(iii) \b(x,y)\ > | | x| j| | y| | O x A y é. tipo-espaço.
Teorema 2.15 A função distância hiperbólica d# é uma métrica em Hm.
Demonstração: A função dH c claramente não-negativa e simétrica, e não-dcgenerada
pelo Teorema 2.10. Só resta então provar a desigualdade triangular
dH{x, z) < dH{x,y) + dH(y, z).
As transformações de Lorentz positivas de R"t+1 atuam em Hr" e obviamente preservam
distâncias hiperbólicas. Portanto, ternos a liberdade de transformar x, y, z por uma trans-formação de Lorentz positiva. Os vetores x, y, z geram um subespaço vetorial de Rm + 1 de
dirrrerrsão ^ 3. Pelo Teorema 2.9, poderrros supor que x, y, z estão no subespaço de R"'+1
gerado por eo1e1,e2- Em outras palavras, podemos assumir que m = 2. Pelo Corolário
2.13, ternos
| b(.x A y,y A z)\ < \\x A y\\\\y A z\\
e assim
cosh(?/(x, y) + rj(y, z)) = cosh(r/ (.x, y)) cosh(r/ (y, z)) + scnh(r/(a,\ y)) senh(r/ (y, z)) = b(x, y)b(y, z) + \\x A y| | ||y A z\\
^ b{x,y)b(y,z) + b(:/ ; A y, y A z)
= b{x,y)b(y,z) + b{x,z)b(y,-y) - b{x,y)b{y,z)
= —b(x,z) = cosh(r](x,z)).
Portanto, temos r/(x,zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA z) ^ rj(x, y) + r/(?y, z). A métrica Au em Hm é chamada métrica hiperbólica. A topologia de Hm determinada
por dfj ê a mesma que provém da métrica euclidiana.
Teorema 2.16 Toda transformação de Lorentz positiva de R"t+1 restrmge-se a urna isornetria de H'", e toda isometria de H"' cstendc-sc a urna única transformação de Lorentz positiva de R"í + 1.
2.2.1 Três Classes de Funções
Nesta seção introduzimos três classes de funções distância que permitem caracterizar as subvariedades umbílicas do espaço hiperbólico Hrn, veja [10].
Para p em Hm. defina a função Lp em Hm por,
Lp(x) = (cosh(-b(x,p)))2 para x E Hm
isto é, L.p(x) é o quadrado da distância em Hrn de p à x. Seja
S(p, r) = {x E Hr" | /.;.,./M /• '}.
Então para 0 < r < oo,
(i) S(p, r) é uma liipersuperfície umbílica, c:ompacta e de curvatura constante senh~2('r),
denominada hiperesfera.
(ii) A distância de S(p,r) à S(p, s) é |r —zyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA a-| para 0 < 6' < oo.
(iii) Toda hipersuperfície completa de curvatura positiva é da forma S(p,r) com per sendo unicamente determinados.
Os hiperplanos hiperbólicos e suas hipersuperfícies eqiiidistant.es também podem ser caracterizados como conjuntos dc nível. Seja S™ o espaço de Sitter definido por
S r = { • >• e R71+1 | = !}•
Para cada hiperplano ir existe um ponto a em S\n tal que
O ponto (j é denominado polo do hiperplano ir, e a é determinado por n a menos de sinal.
Fixe um polo a de 7r, e seja
LzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA7T{X) = s e n h "1 ( - b ( . x\ a ) ) , p a r a x G H"\
isto é, L7T(X) é a distância de x ao hiperplano TT, e seja
n(cr, r) = {xE Hm | L«(x) = r}.
Portanto n = Í2(cr, 0). Então para —oo < r < oo,
(i) Í2(cr, r) é uma hipersuperfície umbílica, completa e de curvatura constante - •
(ii) A distância de Çt{o, r) à Q(cr, s) é \r — s| para —00 < s < 0 0 .
(iii) Toda hipersuperfície umbílica completa de curvatura negativa 6 da forma íl(a,r),
com a e r sendo determinados a menos de sinal. Na verdade, íl(—o~, —r) = 0(cr, r),
e urna escolha de a ou r determina o outro.
Finalmente, consideramos as horoesferas, i.e. as hipersuperfícies umbílicas, completas
de curvatura seccional constante nula de HRN. Considere o cone de luz futuro
LC*+{x G R™+1 | b(x,x) = 0,x0> 0}.
Através de um argumento simples pode-sc mostrar que se v G V " , x G Hr", então
b(x, v) < 0. Seja h, uma horoesfera arbitrária de Hm. Então existe um único v G Vm tal
que
h = {xE Hrnni | b{x,v) = -1}.
Seja
Lh{x) = hi(-b( : i; , ?;)), p a r a x G Hm,
is t o é, Lh(x) é a d i s t â n ci a d e x k h o r o e s fe r a h, e s e j a
H(v,r) = {xeHm | Lh(x) = r}.
Portanto h = H(v, 0). Então para —00 < r < 00,
(i) H(v,r) é uma horoesfera.
(ii) A distância de H(v,r) à H(v,s) é |?' — ,s| para — 00 < ,s < oc.
(iii) Toda horoesfera ocorre como uma H(v, r). Entretanto, v é determinado a menos de
um fator positivo. Uma vez escolhido v, r é unicamente determinado.
2.3 Projeção Estereográfica
SejamzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA pzyxwvutsrqponmljihgfedcbaZWUTSRPONMLKHGEDCA <E Hm, E™ = {3; £ R", + 1 | b(x,p) = 0} o hiperplano tangente a H"1 110 ponto p transladado para a origem, D™ = {y e Ep |yutsrqpomlkjihgfedcbaVSRPMJHDCBA b(y, y) < 1} a bola aberta de raio 1 e
centrada 11a origem de que é denominada a bola de Pomcaré.
Definição 2.17 O difeomorfismo
P : Hrn -> D™\ P{x) = -p + ea(x + p) onde er" = 1 - b(.x, p)
é denominado projeção estereográfica com pólo —p.
Geometricamente P{x) é a intersecção de D™ com a reta que passa pelos pontos ~p e x, veja Figura 2.1. A inversa da projeção estereográfica é
P l : D™ ^ Hm- P-\X) = -p + es(x + p) onde e"á = 1 ~ .
Figura 2.1: Projeção estereográfica com p = c0.
Observamos que U C H'n é urna subvariedade umbílica se, e somente se, P(U) é uma
Capítulo 3
Imersões Justas e "Taut" em
Espaços Hiperbólicos
O objetivo deste capítulo é apresentar os resultados conhecidos sobre imersões justas e "taut" em espaços hiperbólicos. Estes resultados datam do final da década de 70 e estão essencialmente contidos nos artigos [7, 10, 11] de T. E. Cecil e P. J. Ryan.
Dentre as referências citadas acima, o artigo [11] é o que contém os principais resul-tados da teoria e desempenhou um papel fundamental no nosso trabalho. Nesse artigo
os autores generalizam para imersões emzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Hm o estudo de imersões justas e "taut" em
espaços euclidianos desenvolvida por S. Cárter e A. West em [6],
Um dos principais resultados é o seguinte teorema, que estabelece uma condição equi-valente para que uma imersão na bola de Poincaré seja um mergulho "taut" no sentido euclidiano.
Teorema 3.1 Sejam, f : M —> Hm urna imersão de uma, variedade fechada e conexa, e P um,a, projeção estereográfica com polo arbitrário. Então P o / é um m,ergulho "taut," no sentido euclidiano se, e somente se, toda função não-degenerada de cada um dos três tipos (Lp, L^, Lh) é uma função perfeita.
Demonstração: Ver [11, Teorema 2.1].
3.1 Aplicações e Imersões "Taut" em
mJHAH
mhomomor-fisrrio induzido
na homologia de Ceeh é injetivo.
Para imersões no espaço hiperbólico, assim como 110 caso euclidiano, pode-se provar o seguinte resultado.
Proposição 3.3 Sejam M uma variedade fechada e f : M —> H"1 uma imersão. Então f é "taut" se, e somente se, toda Lv de Morse, p <E Hr", é uma função perfeita.
Por intermédio das funções perfeitas pode-se generalizar o conceito de imersões "taut" para variedades não-compactas. Para maiores detalhes veja [11, 12]. Quando dim(M) = 2, para que / : M —• Hm seja "taut" é necessário e suficiente que / possua a propriedade
dos dois pedaços com respeito a hiperesferas de Hni.
Em [7], o autor utiliza a teoria dc Morse para caracterizar as esferas métricas de Hrn,
como consequência tem-se o seguinte resultado, veja [7, Teorema 2].
Teorema 3.4 Seja f : Sn —>• Hm uma imersão. Se f é "taut" então f mergulha Sn como uma esfera métrica de Hm.
Assim como 110 caso euclidiano, as imersões "taut" são mergulhos.
Lema 3.5 Toda imersão "taut" f : M —> Hm é um mergulho.
A demonstração deste resultado segue as mesmas linhas do análogo euclidiano, con-forme [11, Lema 3.2],
Em [2], Banchof provou que uma superfície fechada e "taut" em R3 deve ser uma esfera
ou uma ciclide de Dupin. Para encerrar esta seção apresentamos o principal resultado sobre superfícies "taut" em H3 obtido por Cecil e Ryan em [11]. Observe-se que este
teorema não segue diretamente dos resultados de Banchof sobre; superfícies "taut" cm K3
e é um dos mais profundos teoremas de [11].
Teorema 3.6 Seja f : M2 —>• H3 urna imersão "taut'' de uma superfície fechada e
conexa. Seja P : Hs D3 uma projeção estereográfica com polo arbitrário. Então
P o f mergulha M em D3 como uma esfera euclidiana ou uma ciclide de Dupin.
3.2 Imersões Justas no Espaço Hiperbólico
Definição 3.7zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA Uma aplicação f : X —> H"' de um espaço topológico compacto X no espaço hiperbólico H"' é justa se para todo semi-espaço hiperbólico fechado h em H'", o homomorfismo induzido por inclusão
H*{f-l(h)]r£2) —> H*(M\Z2)
na hornologia de Cech é monom,orfismo.
Quando X = Mn é uma variedade diferenciável fechada e / : M —• Hm é uma imersão
então tem-se a seguinte caracterização:
Teorema 3.8 Uma imersão f : M —> Hm de uma variedade fechada é justa se, e somente se, toda função de Morse L^, onde n é um hiperplano de Hrn, é uma função perfeita.
Observemos que se / : Mn —• H"' é uma imersão c sc toda função de Morse do tipo L7r c uma função perfeita então M c compacta. Quando n = 2, justeza é equivalente a
propriedade dos dois pedaços em relação a hiperplanos e hipersuperfícies equidistantes. 0 seguinte resultado relaciona justeza hiperbólica com justeza euclidiana e mostra que a primeira é uma condição mais forte que a segunda, veja [11, Teorema 4.1].
Teorema 3.9 Uma imersão f : M —> Hrn é justa se, e somente se, P o f : M —> Dm é justa no sentido euclidiano para toda projeção estereográfica P.
A seguinte reformulação do Teorema 3.9 em termos da métrica de Poincaré g - I''b em Dr" pode ser verificada, conforme [11, Corolário 4.2].
Corolário 3.10 Seja f : M —* D"1 uma imersão. Seja g a métrica de Poincaré em D"'. Então f é uma imersão justa cm (D"' ,Q) .se, e somente se, $ o / : M Dm é justa no sentido euclidiano para toda isometria $ de (Dm,Q).
3.2.1 Imersões Justas de Esferas
Nesta subseção são caracterizadas as imersões justas de esferas Sn em Hm. O seguinte
lema será necessário.
(i)zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA f é um mergulho "taut" de Mn em Hm;
(ii) P o f é um mergulho "taut" no sentido euclidiano para toda escolha de projeção estereográfica P.
Demonstração: Polo Teorema 3.1, (ii) => (?'). Para provar (ii), seja V a subvariedade umbílica em questão. Podemos supor que V é uma hipersuperfície completa. Escolha uma projeção estereográfica, Pq de Hm em D™ tal que
Pq(V) = s™-1onlecaZSMH
n
D™,para alguma esfera euclidiana Como / é justa segue-se do Teorema 3.9 que Pq o fé
justa no sentido euclidiano. Como Pqo f(M) está contida na esfera S""- 1, o Teorema 1.29
garante que Pq o f é um mergulho "taut" no sentido euclidiano. Portanto, pelo Teorema
3.1, Po f é "taut" no sentido euclidiano para qualquer escolha de projeção estereográfica P.
O Lema 3.11 fornece um interessante contraste entre justeza e justeza euclidiana. No caso euclidiano a justeza de uma imersão não é alterada quando se aumenta a codimensão da mesma. Mais precisamente, dado
Mn -U Rm -U K"í+k,
onde i é a aplicação de inclusão, então i o f é justa se, e somente se, / é justa, veja Proposição 1.18. Agora considere uma imersão
Mn -U Hrn ^ Hm+k,
onde i mergulha H"' como uma subvariedade1 totalmente geodésica de Hní+k. Pelo Lema
3.11, se / é justa então i o f será justa somente se / for "taut". Os próximos dois teoremas ilustram este fenómeno para Mn homeomorfa à S".
Teorema 3.12 Seja f : Mn H"+k, k > 1, uma, imersão. Se M"' é homeomorfa à esfera Sn, então f é justa se, e somente se, f mergulha Mn com,o uma esfera métrica de dimensão n.
Demonstração: Suponhamos inicialmente que / seja justa. Pelo Teorema 3.9, P o f é justa no sentido euclidiano para qualquer escolha de projeção estereográfica P e assim,