Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de P´os-Gradua¸c˜ao em Engenharia de Produ¸c˜ao
Joelton Fonseca Barbosa
O EFEITO DA AUTOCORRELA ¸
C ˜
AO NO
DESEMPENHO DO GR ´
AFICO
T
2DE
HOTELLING: CASO BIVARIADO
Joelton Fonseca Barbosa
O EFEITO DA AUTOCORRELA ¸
C ˜
AO NO
DESEMPENHO DO GR ´
AFICO
T
2DE
HOTELLING: CASO BIVARIADO
Trabalho apresentado ao Programa de P´os-Gradua¸c˜ao em Engenharia de Produ¸c˜ao da Universidade Federal do Rio Grande do Norte, em cumprimento com as exigˆencias legais para obten¸c˜ao do t´ıtulo de Mestre.
´
Area de Concentra¸c˜ao: Qualidade e Estra-t´egia.
Orientador:
Prof
o. Dr
o. Pledson Guedes de Medeiros
Co-orientador:
Prof
o. Dr
o. Antˆonio Fernando Branco Costa
Cataloga¸c˜ao da Publica¸c˜ao na Fonte. UFRN / SISBI / Biblioteca Setorial Centro de Ciˆencias Exatas e da Terra – CCET.
Barbosa, Joelton Fonseca.
O efeito da autocorrela¸c˜ao no desempenho do gr´aficoT2 de Hotelling: caso bivariado /
Joelton Fonseca Barbosa. - Natal, 2013. 76 f. il.
Orientador: Prof. Dr. Pledson Guedes de Medeiros. Co-orientador: Prof. Dr. Antˆonio Fernando Branco Costa.
Disserta¸c˜ao (Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de P´os-Gradua¸c˜ao Engenharia de Produ¸c˜ao.
1. Multivariado – Disserta¸c˜ao. 2. Controle de processos – Disserta¸c˜ao. 3. Autocorrela¸c˜ao – Disserta¸c˜ao. 4. Limites de controle – Simula¸c˜ao – Disserta¸c˜ao. I. Medeiros, Pledson Guedes de. II. Costa, Antˆonio Fernando Branco. III. T´ıtulo.
RN/UF/BSE-CCET CDU: 519.237
Joelton Fonseca Barbosa
O EFEITO DA AUTOCORRELA ¸
C ˜
AO NO
DESEMPENHO DO GR ´
AFICO
T
2DE
HOTELLING: CASO BIVARIADO
Disserta¸c˜ao de Mestrado submetida ao Programa de P´os-Gradua¸c˜ao Engenharia de Produ¸c˜ao da Universidade Federal do Rio Grande do Norte como parte dos requisitos para a obten¸c˜ao do grau de Mestre em Engenharia de Produ¸c˜ao.
Aprovado em: / /
Banca Examinadora:
Prof. Dr. Pledson Guedes de Medeiros Universidade Federal do Rio Grande do Norte
Orientador
Prof. Dr. Antonio Fernando Branco Costa Co-orientador
Agradecimentos
Agrade¸co primeiramente a Deus, por ter me dado essa oportunidade e enfrent´a-la com muita for¸ca e determina¸c˜ao. Muito obrigado senhor.
`
A minha av´o que n˜ao mediu esfor¸cos para que eu pudesse chegar at´e aqui e me ajudou sempre com suas palavras de incentivo.
`
A minha m˜ae que sempre acreditou e mostrou que eu era capaz, mesmo que nos momentos mais dif´ıceis. A minha irm˜a tamb´em que acompanhou e acreditou em mim.
`
A minha namorada L´ıgia Lisliˆe que me motivou nos momentos que mais precisei.
Ao Prof. Pledson Guedes de Medeiros pela amizade e paciˆencias que teve com as minhas orienta¸c˜oes. Por ter dado uma base na estat´ıstica que foi de fundamental im-portˆancia para a compreens˜ao e desenvolvimento desta disserta¸c˜ao.
Ao meu Prof. Antˆonio Fernando Branco da Costa por aceitado ser meu co-orientaor por t˜ao prontamente responder minha perguntas e sugerir as dire¸c˜oes desta pesquisa.
`
A Profa. Dione Maria Valen¸ca por tirar algumas d´uvidas em das partes mais deci-sivas da minha pesquisa e por participar da banca examinadora.
`
A Elvis Sampaio que me ajudou na minha forma¸c˜ao da base estat´ıstica estudando e resolvendo lista de exerc´ıcios da disciplinas de controle estat´ıstico da qualidade.
“ O que prevemos raramente ocorre; o que menos esperamos geralmente acontece.”
Resumo
O gr´afico de controle T2
de Hotelling tem sido o principal dispositivo
estat´ıstico utilizado no monitoramento de processos multivariados. Atual-mente com o desenvolvimento tecnol´ogico dos sistemas de controle e au-toma¸c˜ao possibilitou uma elevada taxa de coletas das informa¸c˜oes dos sis-temas produtivos em intervalos de tempo muito curto, provocando uma dependˆencia entre os resultados das observa¸c˜oes. Este fenˆomeno conhecido como autocorrela¸c˜ao provoca no controle estat´ıstico de processos multivari-ado uma grande quantidade de alarmes falsos, prejudicando no desempenho do gr´afico. Isto acarreta na viola¸c˜ao do pressuposto de independˆencia e da normalidade da distribui¸c˜ao. Nesta disserta¸c˜ao considerou-se n˜ao s´o a cor-rela¸c˜ao entre duas vari´aveis, mas tamb´em a dependˆencia entre observa¸c˜oes de uma mesma vari´avel, isto ´e, a autocorrela¸c˜ao. Estudou-se, por meio de simula¸c˜ao, o caso bivariado e o efeito da autocorrela¸c˜ao no desempenho do gr´afico T2
de Hotelling.
Palavras-chave: Controle multivariado de processos, autocorrela¸c˜ao, limites de controle e simula¸c˜ao.
Abstract
The chart of control of Hotelling T2
has been the main statistical de-vice used in monitoring multivariate processes. Currently the technologi-cal development of control systems and automation enabled a high rate of collection of information of the production systems in very short time intervals, causing a dependency between the results of observations. This phenomenon known as auto correlation causes in the statistical control of the multivariate processes a high rate of false alarms, prejudicing in the chart performance. This entails the violation of the assumption of inde-pendence and normality of the distribution. In this thesis we considered not only the correlation between two variables, but also the dependence between observations of the same variable, that is, auto correlation. It was studied by simulation, the bi variate case and the effect of auto correlation on the performance of the T2
chart of Hotelling.
Keywords: Multivariate processes control, autocorrelation, control limits and si-mulation.
Sum´
ario
1 Introdu¸c˜ao 1
1.1 Objetivos . . . 3
1.2 Justificativa e importˆancia . . . 3
1.3 M´etodo do trabalho . . . 4
1.4 Abrangˆencia do Trabalho . . . 4
2 GR ´AFICOS DE CONTROLE 5 2.1 Princ´ıpios dos gr´aficos de controle . . . 5
2.2 Subgrupos racionais . . . 6
2.3 Alarmes nos gr´aficos de controle . . . 6
2.4 Desempenho dos gr´aficos de controle . . . 9
2.5 Gr´afico de controle univariado . . . 10
2.6 Gr´afico de controle multivariado . . . 11
2.7 Distribui¸c˜ao Normal Multivariada . . . 13
2.7.1 Estimando o vetor de m´edias e matriz de covariˆancia . . . 14
2.8 A Estat´ıstica T2 de Hotellinge o gr´afico de controle multivariado . . . . 16
3 PROCESSO AUTOCORRELACIONADO 19 3.1 Considera¸c˜oes iniciais . . . 19
3.2 Modelo auto-regressivo AR(1) . . . 21
4 MODELO DA SIMULA ¸C ˜AO 22 4.1 Gerando Amostras . . . 22
4.2 Determina¸c˜ao dos limites de controle . . . 25
4.3 Simula¸c˜ao do LSC pelo algoritmo proposto . . . 27
4.4 Desempenho do gr´aficoT2 sob autocorrela¸c˜ao com novos limites de controle 30 5 CONCLUS ˜OES 39 5.1 Sugest˜oes para pesquisas futuras . . . 40
A ALGORITMO NO SOFTWARE R 41
A.1 Fase I para n=3 . . . 41
A.2 Fase I para n=4 . . . 47
A.3 Fase I para n=5 . . . 53
A.4 Fase II para n=3 . . . 60
A.5 Fase II para n=4 . . . 64
A.6 Fase II para n=5 . . . 68
Referˆencias 73
Lista de Figuras
2.1 Ocorrˆencia de um alarme falso. . . 8 2.2 Ocorrˆencia de um alarme verdadeiro. . . 8 2.3 Curva de NMA vs δ. . . 10 2.4 Distribui¸c˜ao normal multivariada com p= 2, µ1 =µ2 = 0, σ11=σ22= 1
e p12= 0. . . 14 2.5 Distribui¸c˜ao normal multivariada com p= 2, µ1 =µ2 = 0, σ11=σ22= 1
e p12= 0,9. . . 15 2.6 Gr´afico de controle T2
de Hotelling. . . 17
4.1 Gr´afico utilizado para validar o algoritmo que determina limite de controle. 26 4.2 Gr´afico T2
de Hotelling sob efeito de autocorrela¸c˜ao φ= 0,5 . . . 27 4.3 Comparativo dos limites de controle tabelado e simulado para um gr´afico
T2
de Hotelling na presen¸ca de autocorrela¸c˜ao φ = 0,5 . . . 30
Lista de Tabelas
4.1 Novos limites de controle na presen¸ca de autocorrela¸c˜ao para n= 3. . . 28 4.2 Novos limites de controle na presen¸ca de autocorrela¸c˜ao para n= 4. . . 28 4.3 Novos limites de controle na presen¸ca de autocorrela¸c˜ao para n= 5. . . 29 4.4 Valores de N M A para o gr´afico T2
sob autocorrela¸c˜ao (ρ= 0,0). . . . 34 4.5 Valores de N M A para o gr´afico T2
sob autocorrela¸c˜ao (ρ= 0,3). . . . 35 4.6 Valores de N M A para o gr´afico T2
sob autocorrela¸c˜ao (ρ= 0,5). . . . 36 4.7 Valores de N M A para o gr´afico T2
sob autocorrela¸c˜ao (ρ= 0,7). . . . 37
Cap´ıtulo 1
Introdu¸c˜
ao
A crescente concorrˆencia em n´ıvel internacional criou nas empresas a necessidade de priorizarem o objetivo qualidade como um diferencial competitivo de sua participa¸c˜ao no mercado. Estas buscaram melhorar de forma cont´ınua a qualidade de seus produtos, servi¸cos e processos. Atualmente existe a necessidade de uma resposta r´apida e com qualidade ao mercado, isso implica na importˆancia de utilizar o controle estat´ıstico de processos (CEP) como um instrumento gerencial para redu¸c˜ao das varia¸c˜oes entre itens manufaturados.
O controle estat´ıstico de processos foi criado por Shewhart (33), quando ele apre-sentou o primeiro esbo¸co de um gr´afico de controle univariado na Bell Telephone La-boratories. Embora seu quadro inicial fosse pra controlar o percentual de defeitos em um processo de produ¸c˜ao, mais tarde ele estendeu sua ideia para o gr´afico de controle de m´edia e desvio padr˜ao de um processo. Esta ferramenta foi amplamente utilizada pela ind´ustria pela sua facilidade de implementa¸c˜ao, an´alise e n˜ao demandava recursos computacionais.
`
A medida que crescia a necessidade de monitorar a qualidade de produtos e das v´arias etapas dos processos produtivos, aumentou consequentemente a quantidade de vari´aveis da qualidade que deveriam ser monitoradas (controle multivariado). Isto fez com que v´arios gr´aficos univaridos de Shewhart fossem utilizados simultaneamente, e de forma independente, para monitorar o processo de produ¸c˜ao, ver Montgomery (23). Este modelo se tornava invi´avel de ser utilizado quando a quantidade de caracter´ısticas da qualidade aumentava e possu´ıam correla¸c˜ao entre elas, isso levava a uma interpre-ta¸c˜ao errˆoneas sobre a estabilidade do processo. Um outro aspecto que poderia levar a conclus˜oes errˆonea da estabilidade do processo foi o efeito da autocorrela¸c˜ao nas
2
observa¸c˜oes de uma mesma vari´avel, que caracterizava-se por uma observa¸c˜ao atual est´a correlacionada com a observa¸c˜ao anterior, ver Costa et al. (7). Isso provocava uma grande quantidade de ”alarmes falsos”, ou seja, concluir que o processo est´a fora de controle quando na realidade o processo est´a sob controle estat´ıstico. Este fato foi muito observado quando se tentava implementar gr´aficos convencionais utilizando dados com autocorrela¸c˜ao encontrado nas ind´ustrias de processos cont´ınuos, qu´ımica, farmacˆeutica e automatizadas.
Observa-se ent˜ao, que as situa¸c˜oes problem´aticas do controle multivariado e proces-sos com dados autocorrelacionados, citadas anteriormente, foram encontradas pela n˜ao adequabilidade de utiliza¸c˜ao do gr´afico de Shewhart, pois o gr´afico por ele proposto foi criado para monitorar processos da ind´ustria de partes discretas (Costa et al. (7)) que tenham observa¸c˜oes independentes e normalmente distribu´ıdas. Para tentar cons-truir um modelo que incorporasse a correla¸c˜ao na an´alise de processos multivariados Hotelling (12) propˆos a Estat´ıstica T2
que se baseou nos princ´ıpios do gr´afico ¯X de Shewart univariado. Esta estat´ıstica ficou conhecida como T2
Hotelling, foi estimada de forma a fornecer valores que medem a distˆancia entre cada observa¸c˜ao do vetor de m´edia amostral. J´a para melhorar o desempenho dos gr´aficos de controle capazes de li-dar com observa¸c˜oes dependentes ao longo do tempo os pesquisadores est˜ao realizando estudos para verificar o efeito da autocorrela¸c˜ao no controle estat´ıstico de processos univariados, Alwan e Roberts (2), Montgomery e Mastrangelo (25), Lu e Reynolds (18). J´a no controle estat´ıstico de processos multivariados existe uma maior complexi-dade por tratar um n´umero maior de vari´aveis, e aumenta quando h´a autocorrela¸c˜ao em observa¸c˜oes de subgrupos racionais.
1.1 Objetivos 3
´e ajustando os limites de controle para reduzir o n´umero de alarmes falsos, permane-cendo com os dados originais.
1.1
Objetivos
O objetivo geral deste trabalho ´e analisar um gr´aficoT2
de Hotelling bivariado, sob efeito da autocorrela¸c˜ao em suas observa¸c˜oes de acordo com o modeloAR(1) e propor limites de controle utilizando simula¸c˜ao computacional.
Para alcan¸car o objetivo geral, foi necess´ario seguir os seguintes objetivos espec´ıficos:
• Verificar o efeito da autocorrela¸c˜ao no desempenho do gr´afico T2
utilizado no monitoramento de processos bivariados com vari´aveis dependentes.
• Encontrar limites de controle para o gr´afico T2
sujeito a dados com autocorrela-¸c˜ao o diminuir´a a quantidade de alarmes falso.
• Analisar o desempenho na fase II dos gr´aficos T2
Hotelling bivariados sujeitos a diferentes deslocamentos de m´edia.
• Analisar o desempenho do gr´afico de controle com diferentes tamanhos de amos-tras.
• Comparar o modelo proposto por simula¸c˜ao com os encontrados na literatura.
1.2
Justificativa e importˆ
ancia
1.3 M´etodo do trabalho 4
ou seja, ir´a apontar causas especiais indevidamente. Muitos processos industriais mo-dernos est˜ao propensos a gerar dados com efeito de autocorrela¸c˜ao. Esta situa¸c˜ao pode ser explicada pelo desenvolvimento tecnol´ogico dos equipamentos de controle em automa¸c˜ao, que possibilitou uma elevada taxa de coleta de informa¸c˜oes nos sistemas produtivos. Tais processos com esse efeito da autocorrela¸c˜ao passam a quebrar o pressu-posto da independˆencia das observa¸c˜oes. Seguindo essa nova tendˆencia da necessidade de controlar v´arias caracter´ısticas de qualidade de forma simultˆanea (controle multiva-riado) e sujeitas a autocorrela¸c˜ao, propomos neste trabalho analisar o comportamento dos gr´aficos deT2
de Hotelling sob efeito da autocorrela¸c˜ao em diferentes deslocamen-tos de m´edia do processo e, em seguida, encontrar um limite de controle ajustado por meio de simula¸c˜ao que garanta a efic´acia do gr´afico.
1.3
M´
etodo do trabalho
Como este trabalho tem como objetivo investigar o efeito da autocorrela¸c˜ao no controle multivariado de processos, esta pesquisa ´e classificada quanto modalidade como uma pesquisa aplicada com objetivos explorat´orios. J´a em com rela¸c˜ao a sua abordagem ´e classificado como uma pesquisa quantitativa que utiliza o m´etodo da modelagem e simula¸c˜ao.
1.4
Abrangˆ
encia do Trabalho
Os resultados obtidos neste trabalho abrangem:
• Processos bivariados;
• O modelo auto regressivo AR(1);
• Correla¸c˜ao entre z caracter´ısticas da qualidade;
• Autocorrela¸c˜ao nas observa¸c˜oes da mesma caracter´ıstica de qualidade;
Cap´ıtulo 2
GR ´
AFICOS DE CONTROLE
2.1
Princ´ıpios dos gr´
aficos de controle
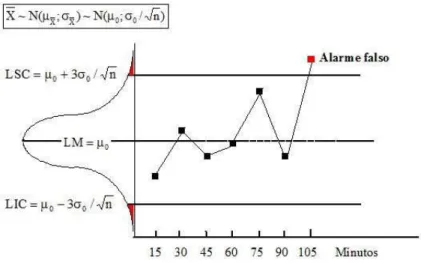
Shewhart desenvolveu o gr´afico de controle como uma ferramenta de apoio ao con-trole estat´ıstico de processos. Esta ´e capaz de monitorar o desempenho de um deter-minado processo ao longo do tempo e detectar causas especiais que o desajustam. O gr´afico de controle apresenta observa¸c˜oes de uma determinada caracter´ıstica de quali-dade em uma ordem temporal e ´e composto por um limite superior de controle (LSC) e um limite inferior de controle (LIC), al´em de uma linha m´edia (LM). Quando as obser-va¸c˜oes da caracter´ıstica de qualidade est˜ao dentro destes limites, n˜ao seguem nenhuma tendˆencia e est˜ao distribu´ıdos aleatoriamente considera-se que este processo est´a sob controle estat´ıstico. J´a quando alguns desses pontos est˜ao fora dos limites de controle ou seguem uma tendˆencia especial ou sistem´atica sinaliza que este processo poder´a estar fora de controle estat´ıstico.
Estes gr´aficos s˜ao bastante utilizados pela sua simplicidade na aplica¸c˜ao e interpre-ta¸c˜ao. Em um gr´afico de Shewhart, por exemplo, para monitorar uma determinada caracter´ıstica de qualidade Xc coleta-se, em um determinado intervalo de tempo h, amostras de tamanhon e calcula-se uma estat´ıstica ¯X. Assumindo que essas observa-¸c˜oes s˜ao rea¸c˜ao de vari´aveis aleat´orias independentes e normalmente distribu´ıdas com valor esperadoµ(m´edia do processo) e desvio padr˜ao (σ). Ent˜ao para um limite de 3σ,
µ±3σ, isso iria garantir que para um processo controlado e isento de causas especiais uma probabilidade de 99,73% das observa¸c˜oes ca´ırem dentro dos limites de controle. Os limites de controle e a linha m´edia s˜ao da por:
2.2 Subgrupos racionais 6
LSCX¯ = µX¯ + 3σX¯ (2.1)
LMX¯ = µX¯ (2.2)
LICX¯ = µX¯ −3σX¯ (2.3)
Importante frisar que na constru¸c˜ao destes limites de controle ´e necess´ario checar os pressupostos de normalidade e independˆencia propostos por Shewhart. Entretanto, nada impede que seja constru´ıdo um gr´afico de Shewhart, utilizando uma distribui¸c˜ao pr´oxima da normal, mas o quesito da independˆencia das vari´aveis dever´a ser atendido.
2.2
Subgrupos racionais
Os subgrupos racionais s˜ao amostras suja observa¸c˜oes s˜ao coletadas praticamente num mesmo instante, em intervalos de tempos regulares. A fundamenta¸c˜ao desses sub-grupos racionais foi introduzida por Shewhart com a finalidade de apresentar como deveriam ser organizados os dados amostrais do processo. Na constru¸c˜ao de um sub-grupo racional dever´a ser levado em considera¸c˜ao o tamanho da amostra e o intervalo de tempo de coleta entre subgrupos de forma que se possa obter uma maior eficiˆencia na sensibilidade de detec¸c˜ao do gr´afico e que se possa ter um menor custo de inspe¸c˜ao. Os subgrupos racionais devem ser formados por unidades semelhantes em composi-¸c˜ao de material, m´etodos de coletas, m´etodo de manufatura e condi¸c˜oes espec´ıficas do processo. A forma¸c˜ao desse subgrupo racional deve ser composta por itens produzi-dos praticamente num mesmo instante, com o objetivo de que as causas especiais n˜ao apare¸cam no mesmo subgrupo racional e sim entre grupos diferentes. Isto diminui a variabilidade em uma mesma amostra, e aumenta a variabilidade entre amostras, caso estejam presentes causas especiais.
2.3
Alarmes nos gr´
aficos de controle
2.3 Alarmes nos gr´aficos de controle 7
de uma suposi¸c˜ao a respeito de um parˆametro da popula¸c˜ao. No controle de processos testam-se as seguintes hip´oteses: H0 hip´otese que considera o processo sob controle e
H1 considera o processo fora de controle. Para um gr´afico de ¯X , tem-se H0 :µx =µ0 eH1 :µx 6=µ0. A hip´otese H0 n˜ao ser´a rejeitada quando o valor de ¯X cair dentro dos limites de controle, e ser´a rejeitada quando o valor de ¯Xcair fora dos limites de controle. Como se trata de um teste estat´ıstico, h´a um riscoα de um valor cair fora do limite de controle e ser julgado que o processo est´a fora de controle quando na verdade ele n˜ao est´a. Esse tipo de erro ´e conhecido como o erro do tipo I (”Alarme falso”). J´a o risco
β ´e a probabilidade de um ponto cair dentro dos limites de controle, n˜ao sinalizando uma causa especial. Este ´e o erro do tipo II (n˜ao-detec¸c˜ao) considerar erroneamente que o processo est´a em controle. Esses erros do tipo I e tipo II s˜ao representados pelas seguintes probabilidades:
α = P rX > LSC¯ X¯ ou X < LIC¯ |µ=µ0
(2.4)
β = P rLICX¯ ≤X¯ ≤LSCX¯|µ6=µ0
(2.5)
O poder do gr´afico de controle (P d) em detectar uma causa especial no processo ´e dado pela probabilidade de detec¸c˜ao na express˜ao abaixo:
P d= 1−β (2.6)
Na ocorrˆencia de uma alarme falso, representado na Figura 2.1 (adaptada de Costa et al., p.65 (7)), um ponto ficou acima do limite de controle e n˜ao houve um deslo-camento na m´edia do processo, ou seja, foi sinalizado indevidamente que o processo est´a sob influˆencia de uma causa especial. A consequˆencia disto ´e uma interven¸c˜ao de manuten¸c˜ao, inspe¸c˜ao do processo em uma hora errada, pois este sinalizou um alarme falso. Para que o impacto de alarmes falsos sob o processo possa ser diminu´ıdo deve-se dimensionar uma valor de abertura dos limites de controle que possam garantir um menor valor para o riscoα.
2.3 Alarmes nos gr´aficos de controle 8
Figura 2.1: Ocorrˆencia de um alarme falso.
Figura 2.2: Ocorrˆencia de um alarme verdadeiro.
2.4 Desempenho dos gr´aficos de controle 9
2.4
Desempenho dos gr´
aficos de controle
O planejamento do gr´afico de controle deve ser realizado em fun¸c˜ao de trˆes parˆame-tros que ir˜ao influenciar diretamente na eficiˆencia do gr´afico sinalizar quando o processo est´a fora de controle. Esses parˆametros s˜ao: o tamanho da amostra n, o intervalo de tempo da amostragem h e a largura do limite de controle k. As amostras de tama-nho grande possibilitar˜ao uma detec¸c˜ao mais r´apida de mudan¸cas no processo, mas em contrapartida ir˜ao aumentar os custos totais de inspe¸c˜ao. J´a intervalos de amostragem mais curtos possibilitar˜ao tamb´em uma detec¸c˜ao mais r´apida na mudan¸ca do processo. Estes dois parˆametros devem ser ajustados conjuntamente a fim de que possa tornar o os procedimentos economicamente vi´aveis e que tenha efic´acia de controle. Na pr´atica industrial o modelo mais bem aceito e usual ´e de um menor intervalo de tempo entre as amostras e amostras de tamanhos menores.
O desempenho dos gr´aficos de controle ´e medido pelo seu valor de NMA, n´umero m´edio de amostras at´e o sinal.
O resultado desta equa¸c˜ao avalia o desempenho do gr´afico, pois quanto menor o NMA mais r´apido o processo ir´a detectar a mudan¸ca.
Quando o processo est´a sob efeito de causa especial, que o desajusta, ´e importante encontrar o NMA menor poss´ıvel, a fim de detectar rapidamente altera¸c˜ao no processo. Pretende-se no planejamento de um gr´afico de controle obter um valor deN M AF = 1
p
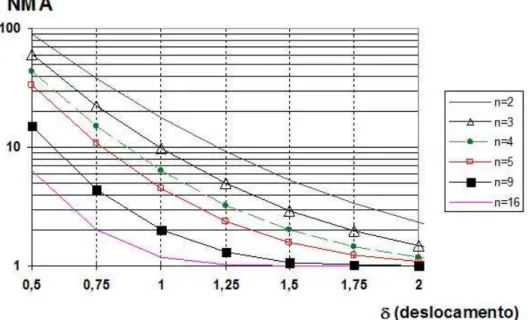
que seja o maior poss´ıvel de forma a minimizar a quantidade de alarmes falsos, visto que o processo se encontra sob controle estat´ıstico. Quando se realiza a compara¸c˜ao entre gr´aficos de controle sujeitos a diferentes parˆametros, aquele que apresentar em simultˆaneo um maior valor para o NMA em controle e um menor valor de NMAF fora de controle dever´a ser considerado como o gr´afico mais eficaz. Importante observar que para realizar compara¸c˜oes de desempenho dos gr´aficos de controle ´e importante ajustar os limites de controle para obter um mesmo valor de NMAF sob controle estat´ıstico de modo a estabelecer-se uma compara¸c˜ao de NMA’s para diferentes dimens˜oes de deslo-camentos do processo (δ).
2.5 Gr´afico de controle univariado 10
amostra e do deslocamento da m´edia no valor do NMA.
Figura 2.3: Curva de NMA vs δ.
O numero de amostras m at´e a ocorrˆencia de um alarme segue uma distribui¸c˜ao geom´etrica de parˆametrop, independentemente de se tratar de um alarme falso ou ver-dadeiro onde o valor esperado de M indica o n´umero m´edio de amostras at´e o alarme verdadeiro NMA ou alarme falso NMAF. Para uma situa¸c˜ao em que a hip´oteseH0 n˜ao ´e rejeitada com µx = µ0, ent˜ao p = α e N M AF = 1−/α denominado por N M A0. Quando a hip´otese n˜ao ´e rejeitada com µx 6= µ0, temos que p =P d e N M A = 1/P d ondeP d= 1−β.
2.5
Gr´
afico de controle univariado
con-2.6 Gr´afico de controle multivariado 11
texto, surgiram in´umeras sugest˜oes de melhorias no gr´afico de Shewhart original afim de melhorar sua eficiˆencia em pequenas mudan¸cas. As modifica¸c˜oes propostas s˜ao para variar alguns parˆametros dos gr´aficos de controle, alterar o esquema de amostragem, e as regras de decis˜ao.
O gr´afico de controle de Shewhart se fundamenta em trˆes parˆametros fundamentais: intervalo de amostragem, tamanho da amostra e limites de controle. A ideia de variar algum desses parˆametros dos gr´aficos de controle univariados (gr´aficos adaptativos) tem sido bastante explorada. Reynolds et al. (30) foram os primeiros pesquisadores a proporem um gr´afico adaptativo. Eles propuseram no gr´afico ¯X com um intervalo de amostragem vari´avel (VSI - Variable Sampling Interval). Mais tarde, Prabhu et al. (29) e Costa (5), independentemente, propuseram amostras de tamanho variado para gr´afico ¯X. Prabhu et al. (28) abordou o caso em que tanto o tamanho da amostra como o intervalo entre a retiradas das amostras s˜ao vari´aveis (VSSI - Variable Sam-pling Size Interval). Costa (6) propˆos um gr´afico adaptativo com os trˆes parˆametros fundamentais vari´aveis.
Outras t´ecnicas de controle tem sido aplicada nos gr´aficos univariados de Shewhart, como na soma cumulativa (CUSUM) e nas m´edias moveis ponderadas exponencial (EWMA). Alguns desses trabalhos podem ser visto em Zimmer et al. (43), Costa and Rahim (8), Epprecht et al. (10), Wu et al. (39), Jiang et al. (13), Luo et al. (21), Li and Wang (16), Shu et al. (34), Dai et al. (9).
2.6
Gr´
afico de controle multivariado
2.6 Gr´afico de controle multivariado 12
controle univariadas n˜ao s˜ao recomendas para estes casos, pois as v´arias caracter´ısticas da qualidade podem estar relacionadas, o que ir´a prejudicar o desempenho dos gr´aficos de controle.
Quando s˜ao monitoradas z caracter´ısticas de qualidade independentes utilizando z
gr´aficos de controle univariados de Shewhart simultaneamente para verificar a estabili-dade do processo, observa-se que h´a uma distor¸c˜ao na interpreta¸c˜ao do erro do tipo I. Suponha que ser˜ao monitoradas duas caracter´ısticas de qualidadeX1 eX2. Ambas com limites de controle trˆes sigma resultando em uma probabilidade de exceder os limites de controle de 0,0027 para cada uma delas. Isto acarretar´a em uma probabilidade con-junta de ambas as vari´aveis excederem o limite de controle simultaneamente , estando sob controle, de (0,0027)(0,0027) = 0,00000729 menor que 0,0027. Levando a um erro do tipo I diferente dos n´ıveis apresentados para os gr´aficos de controle individuais.
Essa distor¸c˜ao de interpreta¸c˜ao no monitoramento do processo aumenta com o n´umero de caracter´ısticas de qualidade. Ent˜ao para p caracter´ısticas de qualidade a um n´ıvel de significˆancia deα para cada p gr´afico de controle, a probabilidade do erro do tipo I do processo global ´e dado por:
α′
= 1−(1−α)p (2.7)
Dessa forma, para as caracter´ısticas de qualidade X1 e X2 o erro do tipo I global do processo ´e 0,00593 praticamente o dobro do α estabelecido para cada uma dessas vari´aveis.
Isso mostra que no monitoramento de gr´aficos multivariados haver´a uma maior pro-babilidade de ocorrer alarmes falsos e uma redu¸c˜ao no poder de detec¸c˜ao `a medida que aumenta o n´umero de caracter´ısticas de qualidade a serem monitoradas.
2.7 Distribui¸c˜ao Normal Multivariada 13
2.7
Distribui¸c˜
ao Normal Multivariada
A distribui¸c˜ao normal multivariada ´e uma generaliza¸c˜ao da normal univariada para o caso no qual se trabalha com duas ou mais vari´aveis aleat´orias simultaneamente. A distribui¸c˜ao normal univariada com m´ediaµe variˆancia σ2
tem densidade de probabi-lidade dada por:
f(x) = √ 1
2πσ2 exp
−1 2
x−µ σ
Para p vari´aveis aleat´orias, dadas pelo vetor aleat´orio X = [X1, X2, . . . , Xp], este tˆem uma distribui¸c˜ao conjunta normal multivariada de dimens˜aop( ou, simplesmente,
p-variada), se sua fun¸c˜ao densidade for dada por:
f(x1, x2, . . . , xp) =
1 (2π)p/2
|Σ|1/2 exp
−1
2 (x−µ) ′
Σ−1(x−µ)
onde µ = (µ1, µ2, . . . , µp) ′
um vetor de dimens˜ao p× que representa a esperan¸ca matem´atica do vetor X, isto ´e, µi =E(Xi), i = 1,2, . . . , p e Σ ´e uma matriz positiva definida de dimens˜aop×pque representa a matriz de variˆancias e covariˆancias do vetor aleat´orio X e ´e dada por:
Σp×p =
σ11 σ12 . . . σ1p
σ21 σ22 . . . σ2p ... ... ... ...
σp1 σp2 . . . σpp
Como a matriz de covariˆancia ´e uma matriz sim´etrica, isto ´e σij = σji,∀i 6= j, onde σii =σ2i =V ar(Xi), i = 1,2, . . . , p e σij =Cov(Xi, Xj), i, j = 1,2, . . . , p,(i6= j). N˜ao se pode deixar de mencionar que quando se trata de mais de uma vari´avel pode acontecer que elas tenham correla¸c˜ao. A correla¸c˜ao ´e uma medida mais adequada para estimar o grau de relacionamento linear entre duas vari´aveis, esta ´e uma grandeza adimensional que ter´a seus valores de referˆencia entre −1 e 1 (Mingoti (22)). Esta ´e dada pela seguinte f´ormula:
pij =
σij
√σ
ii√σjj
, i, j = 1,2, . . . , p com −1≥pij ≥1
2.7 Distribui¸c˜ao Normal Multivariada 14
parte de um vetor que possui distribui¸c˜ao normal multivariada (Mingoti (22)).
Para um caso em que p= 2 a fun¸c˜ao de densidade de X =X1, X2 pode ser escrita em fun¸c˜ao do coeficiente de correla¸c˜ao entre estas vari´aveis. Esta fun¸c˜ao pode ser expressa da seguinte forma:
f(x1, x2) =
1
2πpσ11σ22(1−p 2
12) ×exp
(
1 2 (1−p1
12)
"
x1−µ2
σ11
2 +
x2 −µ2
σ22
2
−2p12
x1−µ1
√σ
11
x2 −µ2
√σ
22
Segue abaixo uma ilustra¸c˜ao dos gr´aficos da distribui¸c˜ao normal bivariada sob o efeito de diferentes graus de correla¸c˜ao e suas respectivas curvas de n´ıvel.
Figura 2.4: Distribui¸c˜ao normal multivariada comp= 2, µ1 =µ2 = 0, σ11 =σ22 = 1 e
p12 = 0.
2.7.1
Estimando o vetor de m´
edias e matriz de covariˆ
ancia
2.7 Distribui¸c˜ao Normal Multivariada 15
Figura 2.5: Distribui¸c˜ao normal multivariada comp= 2, µ1 =µ2 = 0, σ11 =σ22 = 1 e
p12 = 0,9.
forma:
¯
xjk = 1
n
n
X
i=1
xijk
(
j = 1,2
j = 1,2. . . , m
S2 jk =
1
n−1 n
X
i=1
(xijk−x¯ijk) 2
(
j = 1,2
j = 1,2. . . , m
onde xijk ´e a i.a observa¸c˜ao da j.a caracter´ıstica da qualidade na k.a amostra. A covariˆancia entre as caracter´ısticas da qualidadej e h nak.a
amostra ´e:
Sjhk = 1
n−1 n
X
i=1
(xijk−x¯jk) (xihk −x¯hk)
(
k = 1,2. . . , m j 6= h
2.8 A Estat´ıstica T2
de Hotellinge o gr´afico de controle multivariado 16
¯¯
xj = 1 m m X k=1 ¯
xjk j = 1,2
¯ S2 j = 1 m m X k=1 S2
jk j = 1,2
¯
Sjh = 1
m
m
X
k=1
Sjhk j 6=h
Os{x¯¯j}s˜ao elementos do vetor ¯¯X, e a m´edia S de dimens˜ao 2×2 das matrizes de covariˆancia amostral ´e constru´ıda como:
S =
"
¯
S2 1 S¯12 ¯
S21 S¯ 2 2
#
2.8
A Estat´ıstica
T
2de Hotellinge o gr´
afico de
con-trole multivariado
Para monitorar duas ou mais caracter´ısticas de qualidade Hotelling (12) propˆos a Estat´ıstica T2
que se baseou nos princ´ıpios do gr´afico ¯x de Shewart univariado. Esta nova t´ecnica passou a ser amplamente utilizada para monitorar o vetor de m´e-dias do processo. A estat´ıstica T2
para as p caracter´ısticas de qualidade, dadas por
X1, X2, . . . , Xp, cada uma delas com m observa¸c˜oes individuais, no instante i, ´e dada por:
T2
i =n X¯i−µ0
′ −1
X
0 ¯
Xi−µ0
(2.8)
onde n representa o tamanho da amostra (subgrupo racional). O vetor de m´edia dado por ¯X′
= [ ¯x1,x¯2, . . . ,x¯p] e as variˆancias e covariˆancias das vari´aveis aleat´orias contidas em uma matriz de covariˆancia Σp×p. Caso o vetor da p caracter´ısticas siga uma distribui¸c˜ao normal multivariada e sejam independentes, teremos que os valores deT2
i ir˜ao seguir uma distribui¸c˜ao qui-quadrado comp graus de liberdade.
Agora que os valores de µ e Σ foram estimados na sess˜ao 2.7.1 ser´a poss´ıvel criar um gr´aficoT2
2.8 A Estat´ıstica T2
de Hotellinge o gr´afico de controle multivariado 17
T2
=nX¯−X¯¯
′
S−1¯
X−X¯¯
onde ¯X ´e um vetorp×1 que representa um conjunto de m´edia daspcaracter´ısticas de qualidade, ¯ X = " ¯ x1 ¯ x2 #
Com isso j´a ´e poss´ıvel realizar o c´alculo dos valores de T2
, utilizando a express˜ao de T2
de Hotelling. Para sintetizar os resultados desta primeira etapa da simula¸c˜ao, segue uma tabela que mostra todos os valores gerados nesta fase:
k x11k x21k x31k x¯1k x12k x22k x32k x¯2k S 2 1k S
2
2k S12k T 2 k 1 x111 x211 x311 x¯11 x121 x222 x322 x¯22 S
2 11 S
2
22 S121 T 2 1 ... . . . m x11m x21m x31m x¯1m x12m x22m x32m x¯2m S
2 1m S
2
2m S12m T 2 m
M´edia x¯¯1 x¯¯2 S¯
2 1 S¯
2
2 S¯12
Exemplo abaixo de um gr´afico T2
de Hotelling.
Figura 2.6: Gr´afico de controle T2
2.8 A Estat´ıstica T2
de Hotellinge o gr´afico de controle multivariado 18
O limite de controle no gr´aficoT2
pode ser encontrado quando estimarmos os valores de µ e Σ atrav´es de um grande n´umero de amostras, geralmente maiores que 100 (Montgomery (23)). Como os valores de T2
tem um distribui¸c˜ao qui-quadrado, T2 i e
X2
p,α ent˜ao teremos como limite de controle:
LC =X2
p,α (2.9)
Cap´ıtulo 3
PROCESSO
AUTOCORRELACIONADO
3.1
Considera¸c˜
oes iniciais
Os gr´aficos de controle multivariado tradicionais baseiam-se no pressuposto das vari´aveis serem normalmente distribu´ıdas e que em rela¸c˜ao a cada vari´avel n˜ao haja autocorrela¸c˜ao, sejam independentes. A viola¸c˜ao desta ´ultima suposi¸c˜ao acarreta em um grande n´umero de alarmes falsos. Essa dependˆencia entre diferentes medi¸c˜oes de uma vari´avel no tempo pode ser explicada pelo desenvolvimento tecnol´ogico dos equi-pamentos de controle em automa¸c˜ao, que possibilitou uma elevada taxa de coleta de informa¸c˜oes nos sistemas produtivos, al´em dos pequenos Leads Times dos processos produtivos devido `a automa¸c˜ao. Com isso muitos processos industriais modernos est˜ao propensos a gerar dados com efeito de autocorrela¸c˜ao. Exemplo tamb´em citado por Montgomery (23) que a suposi¸c˜ao de independˆencia tamb´em era muitas vezes violada em processos qu´ımicos e farmacˆeuticos. Tais processos com esse efeito da autocorrela-¸c˜ao prejudicam o desempenho dos gr´aficos de controles tradicionais. Alwan e Radson (1) mostraram que as propriedades estat´ısticas dos gr´aficos de controle convencionais s˜ao sens´ıveis a n´ıveis ainda pequenos de autocorrela¸c˜ao, que podem causar uma maior probabilidade de alarme falso. Ent˜ao surge a necessidade de fazer adapta¸c˜oes nos gr´a-ficos de controles convencionais ou criar novos modelos para o controle destes processos que quebram o pressuposto da independˆencia. Uma das maneiras de se lidar com a autocorrela¸c˜ao foi ajustar os limites de controle de modo a controlar a taxa de alarme falso e trabalhar com os dados originais. Esta abordagem foi estudada por: Claro (4), Vanbrackle e Reynolds (36) e Schmid (37). J´a para uma segunda abordagem, utiliza-se os res´ıduos da vari´avel de monitoramento ajustando a um modelo de s´erie temporal
3.1 Considera¸c˜oes iniciais 20
que descreva o comportamento autoregressivo dos dados. Existem muitos modelos e adapta¸c˜oes dessa abordagem, que pode ser vista em Alwan e Roberts (2), Montgomery (24), Montgomery e Mastrangelo (25), Harris e Ross (11), Montgomery et al. (26), Lu e Reynolds (19) e Loredo et al. (17).
Al´em da problem´atica da autocorrela¸c˜ao, verificou-se a necessidade de controlar in´umeras partes do processo para garantir a qualidade total do produto. Isto fez com que v´arias caracter´ısticas de qualidade passassem a ser monitoradas e estas sujeitas ao efeito da autocorrela¸c˜ao. O controle estat´ıstico de processos multivariado ´e bastante complexo, e esta complexidade fica ainda maior quando o processo est´a na presen¸ca da autocorrela¸c˜ao. Alguns m´etodos multivariados no controle estat´ıstico de processos foram desenvolvidos para tratar observa¸c˜oes autocorrelacionadas, Runger e Willemain (31) apresentou uma t´ecnica no controle estat´ıstico multivariado para tratamento de dados com autocorrela¸c˜ao. A t´ecnica apresentada se relaciona com m´etodo da an´alise de componentes principais distinguindo entre tipos de causas especiais e apresenta um controle estat´ıstico baseado na decomposi¸c˜ao dos componentes principais, os quais n˜ao s˜ao autocorrelacionados. Noorossana e Vaghefi (27) descobriam o quanto a autocor-rela¸c˜ao poderia prejudicar no desempenho do NMA no gr´afico de soma cumulativa multivariada (MCUSUM). Muer e Jing (41) estudaram um processo bivariado auto-correlacionado, em que uma caracter´ıstica era independente da outra e estas seguiam um modelo autoregressivo de primeira ordem. Jing e Muer (14) , propˆos um modelo baseado em res´ıduos de um gr´afico de controle T2
em que investiga processos biva-riados autocorrelacionados em que uma caracter´ıstica possui autocorrela¸c˜ao seguindo um modelo autoregressivo de primeira ordem, enquanto que as observa¸c˜oes da outra caracter´ıstica s˜ao independentes. Xia e Jeffrey (40), expandiram o monitoramento de gr´aficos univariados residuais para o ambiente multivariado e com isso, utilizando o vetor autoregressivo (VAR), foi poss´ıvel examinar os efeitos das mudan¸cas de parˆame-tros de processo no gr´afico residual VAR. Xia e Jeffrey (40) avaliaram o desempenho do gr´afico em termos de NMA obtidos por simula¸c˜ao e mostraram a viabilidade de um gr´afico de controle VAR.
3.2 Modelo auto-regressivo AR(1) 21
3.2
Modelo auto-regressivo AR(1)
Os procedimentos usais do controle multivariado de processo s˜ao desenvolvidos sob a suposi¸c˜ao de que os vetores das vari´aveis s˜ao normalmente e identicamente distribu´ıdos com vetor de m´ediaµ e uma matriz de covariˆancia Σ. De acordo com os intervalos de amostragem do processo o vetor de observa¸c˜oes Yt no tempo t pode ser representado por:
Yt=µ+ǫt, t = 1,2. . .
onde ǫt ´e um vetor de erro aleat´orio com distribui¸c˜ao normal e independente com vetor de m´edia zero e matriz de covariˆancia Σ. Para determinar se o processo est´a sob controle com rela¸c˜ao ao vetor de m´edias quando tem-se uma matriz de covariˆancia Σ conhecida usa-se, segundo Montgomery (23), o modelo semelhante ao de Shewart,
LSC = X2
p,α, como gr´afico de controle com limite superior X 2
utilizando a seguinte estat´ıstica:
X2
= (Yt−µ0) ′
Σ−1
(Yt−µ0)
ondeµ0 ´e o valor alvo do vetor de m´edia.
No entanto em muitos processos de produ¸c˜ao a suposi¸c˜ao de independˆencia ´e vio-lada, que por sua vez afetam diretamente na determina¸c˜ao correta do limite de controle, e a consequˆencia ´e uma grande quantidade de alarmes falsos. O do processo que apre-senta autocorrela¸c˜ao provoca uma redu¸c˜ao no desempenho do gr´afico. Isto pode levar a um valor de NMAF menor que o esperado, quando o processo est´a sob controle. Para superar tal problem´atica ´e necess´ario primeiramente conhecer e modelar os pa-dr˜oes de s´eries temporais encontrados. Em muitos processos industriais os valores das caracter´ısticas de qualidade medidas, ao longo do tempo, se ajustam a um modelo co-nhecido AR(1).Com respeito aos gr´aficos de controle multivariados Kramer e Schmid (15) utilizaram modelo AR(1) para modifica¸c˜oes da EWMA multivariada na presen¸ca de autocorrela¸c˜ao. Para um processo autocorrelacionado o modelo AR(1) ´e dado por:
Yt=µ+φ(Yt−1−µ) +ǫt, t = 1,2, . . . , Y0 =µ, ǫ˜N(0, σǫ)
Cap´ıtulo 4
MODELO DA SIMULA ¸
C ˜
AO
4.1
Gerando Amostras
Diante da problem´atica encontrada em monitorar processos multivariados que es-t˜ao sob efeito da autocorrela¸c˜ao em seus dados, foi proposto neste trabalho simular um modelo bivariado que pudesse representar situa¸c˜oes do cotidiano utilizando parˆametros inerentes a esse tipo de processo, e observar o desempenho do gr´aficoT2
de Hotelling bivariado nesse cen´ario. A primeira suposi¸c˜ao foi considerar que uma das duas ca-racter´ısticas de qualidade estavam sob efeito de autocorrela¸c˜ao dentro de um mesmo subgrupo racional. Outra suposi¸c˜ao considerada no modelo que estas caracter´ısticas de qualidade possu´ıam uma correla¸c˜ao entre si. Para melhor exemplificar este modelo segue a estrutura para gerar as 10.000 amostras com 3 observa¸c˜oes cada (x1, x2, x3):
x1i = µx+ǫx1
i N(0,1) i= 1,2, . . . ,10.000 (4.1)
x2i = µX +φ(x1i−µX) +ǫx2
i N(0,1) i= 1,2, . . . ,10.000 (4.2)
x3i = µX +φ(x3i−µX) +ǫx3
i N(0,1) i= 1,2, . . . ,10.000 (4.3)
onde,µX ´e m´edia da caracter´ıstica de qualidadexeǫx1i, ǫx2i eǫx3i s˜ao os erros aleat´orios independentes e normalmente distribu´ıdos de cada elemento da amostra. A express˜ao (4.1) representa o primeiro elemento retirado em uma amostra de tamanho trˆes (n= 3) em um instantei, x1i ´e o primeiro elemento da amostra retirado no instante i. O se-gundo elemento retirado da amostra ´e a observa¸c˜aox2i que possui uma autocorrela¸c˜ao com ax1i determinada pelo coeficienteφ. E por ´ultimo o elementox3i que possui auto-correla¸c˜aoφ comx2i. O primeiro passo para criar essas amostras foi gerar um vetorX1 supondo normalN(0,1) de tamanho i= 10.000, a partir do vetorX1 gera-se os 10.000
4.1 Gerando Amostras 23
elementos deX2 segundo a equa¸c˜ao 4.3, em seguida, gera-se os 10.000 elementos deX3 segundo a equa¸c˜ao 4.3. Importante mencionar que neste trabalho os valores adotados para simular autocorrela¸c˜ao ser˜ao positivos 0≤ φ ≤ 1. Ap´os este processo temos um vetor com 10.000 amostras tendo, cada um, 3 observa¸c˜oes (x1, x2, x3).
O passo seguinte foi gerar os valores da segunda caracter´ıstica de qualidade denomi-nada aqui porY. ´E sabido que est´a caracter´ıstica ter´a uma correla¸c˜ao com X. Abaixo express˜ao matem´atica que mostra como foram gerados os dados das 10.000 amostras deY com observa¸c˜oes 3 observa¸c˜oes cada (y1,y2,y3):
y1i = ρx1i+ǫy1
i N(0,1) i= 1,2, . . .10.000
y2i = ρx2i+ǫy2
i N(0,1) i= 1,2, . . .10.000
y3i = ρx2i+ǫy3
i N(0,1) i= 1,2, . . .10.000
onde ρ representa o coeficiente de correla¸c˜ao entre a caracter´ıstica Y e X. ǫy1
i, ǫy2i e
ǫy3
i ´e o erro aleat´orio independente e normalmente distribu´ıdo dos trˆes elementos da amostra. O primeiro elemento de cada amostra de Y possui uma correla¸c˜ao com o primeiro elemento de uma amostra de X e assim por diante at´e o terceiro e ´ultimo elemento de cada amostra, fazendo com que as observa¸c˜oes da vari´avely sejam geradas com correla¸c˜ao com a caracter´ıstica de qualidadex. Como est˜ao sendo tratadas carac-ter´ısticas de qualidade de um determinado produto ´e normal que aspectos de qualidade deste possam ter rela¸c˜ao com outro aspecto do produto, ou seja, haja correla¸c˜ao. O vetor de amostra deY ter´a tamb´em o mesmo tamanho deX com o valor dem= 10.000 amostras.
4.1 Gerando Amostras 24
Para n= 4 da vari´avelX temos:
x1i = µx+ǫx1
i N(0,1) i= 1,2, . . . ,10.000 (4.4)
x2i = µX +φ(x1i −µX) +ǫx2
i N(0,1) i= 1,2, . . . ,10.000
x3i = µX +φ(x2i −µX) +ǫx3
i N(0,1) i= 1,2, . . . ,10.000
x4i = µX +φ(x3i −µX) +ǫx4
i N(0,1) i= 1,2, . . . ,10.000
Para n= 4 da vari´avelY temos:
y1i = ρx1i+ǫy1
i N(0,1) i= 1,2, . . . ,10.000
y2i = ρx2i+ǫy2
i N(0,1) i= 1,2, . . . ,10.000
y3i = ρx3i+ǫy3
i N(0,1) i= 1,2, . . . ,10.000
y4i = ρx4i+ǫy4
i N(0,1) i= 1,2, . . . ,10.000
Para n= 5 da vari´avelX temos:
x1i = µx+ǫx1
i N(0,1) i= 1,2, . . . ,10.000
x2i = µX +φ(x1i −µX) +ǫx2
i N(0,1) i= 1,2, . . . ,10.000
x3i = µX +φ(x2i −µX) +ǫx3
i N(0,1) i= 1,2, . . . ,10.000
x4i = µX +φ(x3i −µX) +ǫx4
i N(0,1) i= 1,2, . . . ,10.000
x5i = µX +φ(x4i −µX) +ǫx5
i N(0,1) i= 1,2, . . . ,10.000
Para n= 5 da vari´avelY temos:
y1i = ρx1i+ǫy1
i N(0,1) i= 1,2, . . . ,10.000
y2i = ρx2i+ǫy2
i N(0,1) i= 1,2, . . . ,10.000
y3i = ρx3i+ǫy3
i N(0,1) i= 1,2, . . . ,10.000
y4i = ρx4i+ǫy4
i N(0,1) i= 1,2, . . . ,10.000
y5i = ρx5i+ǫy4
i N(0,1) i= 1,2, . . . ,10.000
4.2 Determina¸c˜ao dos limites de controle 25
inserido dentro da amostra um valor deφque faz com que elementos retirados de uma mesma amostra tenham uma autocorrela¸c˜ao. Este valores para esta pesquisa est˜ao variando entre φ = {0,0; 0,3; 0,5; 0,7}. Na outra caracter´ıstica de qualidade Y ter´a uma correla¸c˜ao ρ = {0,0; 0,3; 0,5; 0,7} com a vari´avel X, ou seja, apenas a vari´avel
X ter´a efeito de autocorrel¸c˜ao direta e a var´avelY ter´a uma correla¸c˜ao com a vari´avel
X, o que ir´a trazer indiretamente efeitos da autocorrela¸c˜ao para esta vari´avel por elas serem correlacionadas.
4.2
Determina¸c˜
ao dos limites de controle
Nas aplica¸c˜oes do controle de qualidade multivariado, observou-se que os limites de controle para a estat´ısticaT2
de Hotelling (eq.2.9) ´e importante para determinar a efic´acia do monitoramento, e isto ir´a depender de como o gr´afico esteja sendo usando. H´a duas fases distintas no uso de um gr´afico de controle. Fase 1 ´e utilizado o gr´afico de controle para determinar se o processo est´a sob controle estat´ıstico e determinar atrav´es dos m subgrupos extra´ıdos os valores estimados de ¯¯x e S. O objetivo da fase 1 ´e obter um processo em controle para que se possa determinar o limite de controle para ser utilizado na fase 2 , que ´e o monitoramento da produ¸c˜ao futura.
Segundo Montgomery (23), quando µ e Σ s˜ao estimados a partir de um grande n´umero de amostras preliminares, costuma-se usar o LSC =X2
α,p como limite superior de controle em ambas as fases, 1 e 2. Como utilizamos uma amostra m = 10.000 elementos o limite superior de controle ser´a calculado utilizando X2
α,p onde α ´e o erro do tipo I (”Alarme falso”) e p ´e os graus de liberdade determinado pelo n´umero de caracter´ısticas a serem monitoradas. Utilizado um α = 0,005 e um valor p = 2, pois trata-se de um caso bivariado, ´e encontrado na literatura um valor tabelado para esse limite de controle de LSC = X2
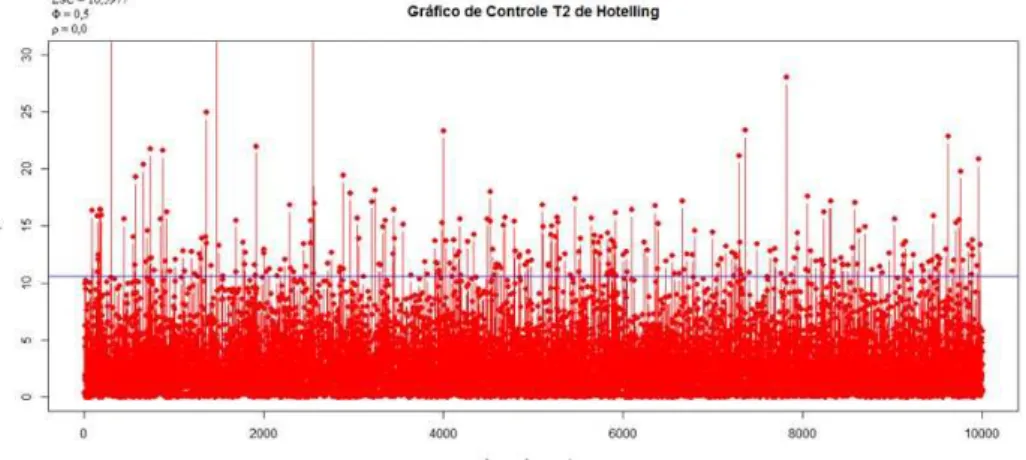
0,005,2 = 10,5977. Este limite garante que o processo estando em controle, ou seja, na ausˆencia de um deslocamento de m´edia para ambas as vari´aveis, haver´a apenas 0,5% (50 amostras) dos pontos que exceder˜ao este valor. Isto servir´a para validar o algoritmo de busca (ver anexo) criado para determinar o limite de controle em processos com autocorrela¸c˜ao. Visto que neste caso n˜ao podemos usar o resultado de que o LSC = X2
0,005,2, pois a suposi¸c˜ao de independˆencia n˜ao ´e satisfeita. O teste feito na ausˆencia de autocorrela¸c˜ao e sem deslocamentos de m´edia, usando o processo de simula¸c˜ao proposto,encontrou um limite de controle simulado de LSC = 10,58226, o que se aproxima bastante do valor real X2
4.2 Determina¸c˜ao dos limites de controle 26
controle realizado na simula¸c˜ao para encontrar o limite de controle.
Figura 4.1: Gr´afico utilizado para validar o algoritmo que determina limite de controle.
Este mecanismo de busca do limite de controle utilizado pelo algoritmo proposto ordena todos os valores deT2
em um vetor de ordem crescente. Ap´os essa organiza¸c˜ao ir´a garantir que 50(α= 0,5%) amostras das 10.000 fiquem acima do limite de controle. Para isso o limite de controle ficar´a igual a:
LSCsimulado =
T2 50+T
2 51 2
Assim com este modelo validado poderemos agora analisar quais os ajustes no li-mite de controle deve ser feito na presen¸ca de autocorrela¸c˜ao.
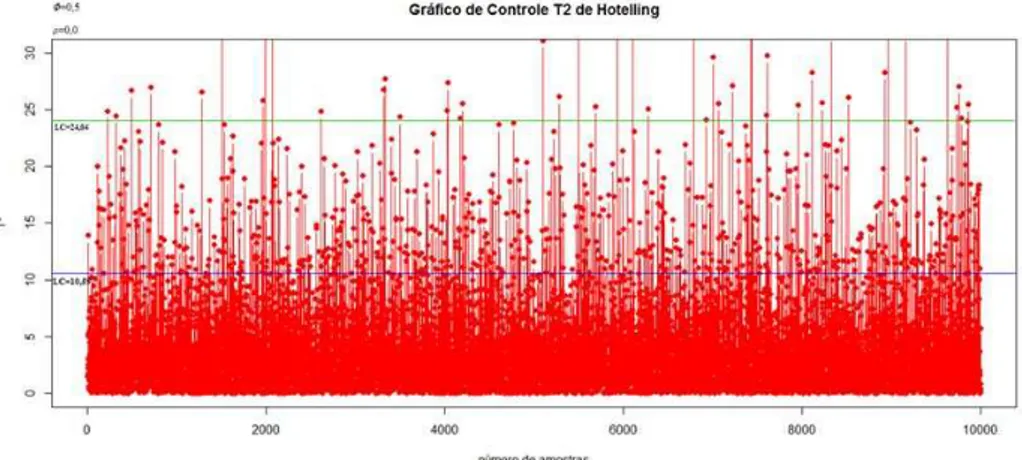
Mas quando estamos trabalhando com processos multivariados na presen¸ca da au-tocorrela¸c˜ao percebe-se que mesmo n˜ao havendo deslocamento de m´edia no processo este passa a ter pontos que excedem o limite de controle provocando uma grande quan-tidade de alarmes falsos prejudicando a confiabilidade do gr´afico de controle ver Figura 4.2 abaixo. E essa quantidade de pontos que excedem o limite de controle aumenta `a medida que a autocorrela¸c˜ao fica mais forte, ou seja, quando φ se aproxima de 1. O exemplo gr´afico abaixo ´e realizado atrav´es do algoritmo constru´ıdo no cap´ıtulo anterior utilizando um φ= 0,5.
Percebe-se claramente em fun¸c˜ao do limite utilizado na literatura de X2
4.3 Simula¸c˜ao do LSC pelo algoritmo proposto 27
Figura 4.2: Gr´afico T2
de Hotelling sob efeito de autocorrela¸c˜aoφ = 0,5
uma grande quantidade de alarmes falsos, dado que o processo n˜ao teve deslocamento de m´edia. Como a ´unica influˆencia para isso foi a presen¸ca da autocorrela¸c˜ao, para que o gr´afico de controle multivariado tenha uma menor quantidade de alarmes falsos o limite de controle dever´a sofrer um alargamento que garanta umα = 0,5%.
4.3
Simula¸c˜
ao do LSC pelo algoritmo proposto
Os resultados num´ericos obtidos nesse trabalho s˜ao para valores n˜ao negativos deφ, correspondendo a valores n˜ao negativos de ρ. A justificativa para tal op¸c˜ao ´e que, Lu e Reynolds (20) argumentam que em aplica¸c˜oes onde se deseja monitorar o processo, existem muito mais situa¸c˜oes de autocorrela¸c˜ao positiva que negativa.Os parˆametros que variados nas simula¸c˜oes foram os valores do coeficiente de autocorrela¸c˜ao φ e o valor da correla¸c˜aoρ. Estes dois sofreram varia¸c˜oes de acordo com o seguinte intervalo 0,0; 0,3; 0,5 e 0,7.
4.3 Simula¸c˜ao do LSC pelo algoritmo proposto 28
n = 3
φ ρ S1 S12 S22 LC 0,0 0,0 1,00 1,00 0,00 10,58 0,3 0,0 0,82 1,00 0,00 16,34 0,5 0,0 0,73 1,00 0,00 24,04 0,7 0,0 0,66 1,00 0,00 35,69 0,3 0,3 0,82 1,07 0,25 16,30 0,5 0,3 0,73 1,07 0,22 24,04 0,7 0,3 0,66 1,06 0,20 35,54 0,3 0,5 0,82 1,20 0,41 16,35 0,5 0,5 0,73 1,18 0,36 24,02 0,7 0,5 0,66 1,17 0,33 35,62 0,3 0,7 0,82 1,40 0,58 16,32 0,5 0,7 0,73 1,36 0,51 23,98 0,7 0,7 0,66 1,32 0,46 35,68 0,0 0,3 1,00 1,09 0,30 10,63 0,0 0,5 1,00 1,25 0,50 10,62 0,0 0,7 1,00 1,49 0,70 10,57
Tabela 4.1: Novos limites de controle na presen¸ca de autocorrela¸c˜ao para n= 3.
n = 4
φ ρ S1 S12 S22 LC 0,0 0,0 0,00 1,00 0,00 10,59 0,3 0,0 0,00 1,00 0,00 16,44 0,5 0,0 0,00 1,00 0,00 25,07 0,7 0,0 0,00 1,00 0,00 40,01 0,3 0,3 0,00 1,08 0,26 16,45 0,5 0,3 0,00 1,07 0,24 25,09 0,7 0,3 0,00 1,07 0,23 40,03 0,3 0,5 0,00 1,22 0,44 16,45 0,5 0,5 0,00 1,20 0,41 25,15 0,7 0,5 0,00 1,19 0,38 40,06 0,3 0,7 0,00 1,43 0,61 16,49 0,5 0,7 0,00 1,40 0,57 25,08 0,7 0,7 0,00 1,37 0,54 40,11 0,0 0,3 0,00 1,09 0,30 10,59 0,0 0,5 0,00 1,25 0,50 10,58 0,0 0,7 0,00 1,49 0,70 10,59
Tabela 4.2: Novos limites de controle na presen¸ca de autocorrela¸c˜ao para n= 4.
´
autocor-4.3 Simula¸c˜ao do LSC pelo algoritmo proposto 29
n = 5
φ ρ S1 S12 S22 LC 0,0 0,0 0,00 1,00 0,00 10,59 0,3 0,0 0,00 1,00 0,00 16,49 0,5 0,0 0,00 1,00 0,00 25,70 0,7 0,0 0,00 1,00 0,00 43,21 0,3 0,3 0,00 1,08 0,27 16,48 0,5 0,3 0,00 1,08 0,26 25,68 0,7 0,3 0,00 1,08 0,26 43,12 0,3 0,5 0,00 1,23 0,46 16,52 0,5 0,5 0,00 1,22 0,44 25,69 0,7 0,5 0,00 1,21 0,43 43,26 0,3 0,7 0,00 1,45 0,64 16,51 0,5 0,7 0,00 1,43 0,61 25,69 0,7 0,7 0,00 1,42 0,60 43,19 0,0 0,3 0,00 1,09 0,30 10,61 0,0 0,5 0,00 1,25 0,50 10,60 0,0 0,7 0,00 1,49 0,70 10,61
Tabela 4.3: Novos limites de controle na presen¸ca de autocorrela¸c˜ao para n= 5.
rela¸c˜ao cresce, independendo do valor deρfixado. Exemplo desta ocorrˆencia ´e quando ´e analisado um valor deφ = 0,7 eρ= 0,0 para umn= 3, que chega a alargar o limite de controle em trˆes vezes mais em rela¸c˜ao ao valor tabelado de 10,5977, chegando a um valor de 35,69. Isto mostra que se comete um erro absurdo utilizando-seLSC =X2
0,005,2 quando na presen¸ca de autocorrela¸c˜ao. Vejamos na Figura 4.3 um exemplo do alarga-mento no gr´afico de controle para uma situa¸c˜ao em que o valorφ = 0,5 eρ= 0,0 para
n = 3. A linha verde representa o novo limite de controle igual LC=24,04 e a linha azul representa o limite de controle utilizando umaX2
0,005,2.
4.4 Desempenho do gr´afico T2
sob autocorrela¸c˜ao com novos limites de controle 30
Figura 4.3: Comparativo dos limites de controle tabelado e simulado para um gr´afico T2
de Hotelling na presen¸ca de autocorrela¸c˜ao φ = 0,5
4.4
Desempenho do gr´
afico
T
2sob autocorrela¸c˜
ao
com novos limites de controle
O NMA, n´umero m´edio de amostras at´e o sinal, tem sido adotado como medida de desempenho do gr´afico de controle mais utilizada quando o intervalo de tempo entre as amostras for constante. Quando as observa¸c˜oes deX s˜ao independentes, o NMA ´e o inverso do poder de detec¸c˜ao do gr´afico de controle, isto ´e,N M A= 1/p. J´a quando o processo est´a sob controle usa-se o NMAF, n´umero m´edio de amostra at´e um alarme falso, que ´e o inverso de α, isto ´e, N M AF = 1/α. No cap´ıtulo anterior os limites de controle foram ajustados para garantir que na constru¸c˜ao do gr´afico de controle (Fase I) obtivesse o valor α = 0,005 (Formula 2.7) isto ´e um NMAF=200. Atendido aos quesitos de constru¸c˜ao do gr´afico na Fase I, o pr´oximo passo ´e testar o desempenho dos gr´aficos de controle multivariado na presen¸ca da autocorrela¸c˜ao e na presen¸ca de causas especiais que perturbem a m´edia do processo para poder analisar a velocidade dessa detec¸c˜ao na Fase II de monitoramento. Nesta fase deseja-se que o NMA seja o menor poss´ıvel, para que uma mudan¸ca seja rapidamente detectada.
des-4.4 Desempenho do gr´afico T2
sob autocorrela¸c˜ao com novos limites de controle 31
vio padr˜ao de X. Ficando da seguinte forma: a vari´avel x1 com deslocamento de
δx(0,0; 0,5; 1,0; 1,5) e a vari´avel x2 com deslocamentos δy(0,0; 0,5; 1,0; 1,5). O pr´o-ximo passo ´e inserir estes deslocamentos no modelo anal´ıtico que gera os dados do processo autocorrelacionado.
Segue abaixo o resultado da inser¸c˜ao do deslocamento de m´edia δx e δy Para para amostras de tamnho n=3. A primeira caracter´ıstica de qualidade denominada pela vari´avel x segue o modelo com a inser¸c˜ao do deslocamento de m´edia no subgrupo racional:
x1i = µx+δx+ǫx1
i i= 1,2, . . . ,1.000
x2i = µX +δx+φ(x1i−µX −δx) +ǫx2
i i= 1,2, . . . ,1.000
x3i = µX +δx+φ(x2i−µX −δx) +ǫx3
i i= 1,2, . . . ,1.000
Agora a segunda caracter´ıstica de qualidade denominada pela vari´avel y segue o modelo com a inser¸c˜ao do deslocamento de m´edia no subgrupo racional:
y1i = ρ(µx+δx+ǫx1
i) +ǫy1i +δy i= 1,2, . . . ,1.000
y2i = ρ[µX +δx+φ(x1i −µX −δx) +ǫx2
i] +ǫy2i +δy i= 1,2, . . . ,1.000
y3i = ρ[(µX +δx+φ(x2i −µX −δx) +ǫx3
i] +ǫy3i +δy i= 1,2, . . . ,1.000
Para n= 4 inser¸c˜ao do deslocamento de m´edia δx na vari´avel X:
x1i = µx+δx+ǫx1
i i= 1,2, . . . ,1.000
x2i = µX +δx+φ(x1i−µX −δx) +ǫx2
i i= 1,2, . . . ,1.000
x3i = µX +δx+φ(x2i−µX −δx) +ǫx3
i i= 1,2, . . . ,1.000
x4i = µX +δx+φ(x3i−µX −δx) +ǫx4
i i= 1,2, . . . ,1.000
4.4 Desempenho do gr´afico T2
sob autocorrela¸c˜ao com novos limites de controle 32
y1i = ρ(µx+δx+ǫxy) +ǫy1
i +δy i= 1,2, . . . ,1.000
y2i = ρ[µX +δx+φ(x1i −µX −δx) +ǫx2
i] +ǫy2i +δy i= 1,2, . . . ,1.000
y3i = ρ[(µX +δx+φ(x2i −µX −δx) +ǫx3
i] +ǫy3i +δy i= 1,2, . . . ,1.000
y4i = ρ[(µX +δx+φ(x3i −µX −δx) +ǫx4
i] +ǫy4i +δy i= 1,2, . . . ,1.000
Para n= 5 inser¸c˜ao do deslocamento de m´edia δx na vari´avel X:
x1i = µx+δx+ǫx1
i i= 1,2, . . . ,1.000
x2i = µX +δx+φ(x1i−µX −δx) +ǫx2
i i= 1,2, . . . ,1.000
x3i = µX +δx+φ(x2i−µX −δx) +ǫx3
i i= 1,2, . . . ,1.000
x4i = µX +δx+φ(x3i−µX −δx) +ǫx4
i i= 1,2, . . . ,1.000
x5i = µX +δx+φ(x4i−µX −δx) +ǫx5
i i= 1,2, . . . ,1.000
Para n= 5 inser¸c˜ao do deslocamento de m´edia δy na vari´avel y:
y1i = ρ(µx+δx+ǫx1
i) +ǫy1i +δy i= 1,2, . . . ,1.000
y2i = ρ[µX +δx+φ(x1i −µX −δx) +ǫx2
i] +ǫy2i +δy i= 1,2, . . . ,1.000
y3i = ρ[(µX +δx+φ(x2i −µX −δx) +ǫx3
i] +ǫy3i +δy i= 1,2, . . . ,1.000
y4i = ρ[(µX +δx+φ(x3i −µX −δx) +ǫx4
i] +ǫy4i +δy i= 1,2, . . . ,1.000
y5i = ρ[(µX +δx+φ(x4i −µX −δx) +ǫx5
i] +ǫy5i +δy i= 1,2, . . . ,1.000
4.4 Desempenho do gr´afico T2
sob autocorrela¸c˜ao com novos limites de controle 33
de controle multivariado.Para analisar o desempenho dos gr´aficos na Fase II com seus limites de controles ajustados, o programa dever´a determinar, para cada combina¸c˜ao deφ, ρ, δx e δy, a posi¸c˜ao em que a primeira amostra ultrapassa o limite de controle e armazenar esta posi¸c˜ao em um vetor de posi¸c˜ao. Esta intera¸c˜ao ser´a realizadas 1.000 vezes, ou seja, para cada combina¸c˜ao dos parˆametros do gr´afico ser´a gerado 1.000 va-lores de N M A e ap´os este processo ser´a calculado a m´edia geom´etrica representando assim com uma pequena margem de erro o valor do aproximado doN M A.
4. 4 D es em p en h o d o gr ´afi co T 2 so b au to co rr ela ¸c˜a o co m n ov os lim it es d e co n tr ole 34
ρ= 0,0
LC 10,58 10,59 10,59 16,34 16,44 16,49 24,04 25,07 25,70 35,69 40,01 43,21 N M A
n= 3 n = 4 n= 5 n = 3 n= 4 n = 5 n = 3 n= 4 n = 5 n= 3 n= 4 n = 5 δx δy φ = 0,0 φ= 0,3 φ= 0,5 φ= 0,7
0,0 0,0 199,30 198,57 197,74 200,53 201,59 197,61 196,09 198,23 196,57 199,42 202,16 197,27 0,0 0,5 52,79 41,28 31,55 117,23 99,78 79,29 151,64 144,90 145,91 172,13 173,86 167,35 0,0 1,0 10,49 6,79 4,98 28,51 19,03 13,12 73,83 55,76 44,57 121,73 114,62 105,30 0,0 1,5 3,11 2,23 1,67 7,54 4,70 3,09 22,01 13,87 9,58 58,70 52,51 42,33 0,0 0,0 199,30 198,57 197,74 200,53 201,59 197,61 196,09 198,23 196,57 199,42 202,16 197,27 0,5 0,0 55,88 41,16 33,42 61,07 49,12 41,34 76,19 63,54 59,60 89,23 84,18 84,37 0,5 0,5 26,72 18,20 13,22 41,51 33,53 25,14 60,05 53,60 46,36 84,33 76,19 72,39 0,5 1,0 7,40 4,93 3,59 16,92 11,34 7,69 35,07 28,60 20,44 57,81 55,21 49,41 0,5 1,5 2,74 1,88 1,52 5,91 3,64 2,56 14,96 9,65 6,19 33,89 30,62 23,89 1,0 0,0 10,35 6,72 4,91 13,82 9,99 7,95 18,55 15,69 13,82 27,72 27,17 26,22 1,0 0,5 7,94 5,00 3,55 11,56 8,14 6,39 17,06 14,23 11,36 25,30 23,57 22,32 1,0 1,0 3,76 2,58 1,89 6,52 4,54 3,35 12,13 9,01 7,35 19,35 19,00 17,59 1,0 1,5 1,98 1,44 1,22 3,39 2,35 1,67 6,77 4,76 3,40 13,36 11,58 8,99 1,5 0,0 3,00 2,21 1,74 4,57 3,34 2,66 6,43 5,49 4,94 9,81 9,67 9,13 1,5 0,5 2,81 1,92 1,53 4,15 2,91 2,40 6,18 5,15 4,05 9,13 9,10 8,46 1,5 1,0 1,99 1,45 1,23 2,89 2,24 1,75 4,82 3,84 3,07 7,73 7,51 6,78 1,5 1,5 1,41 1,15 1,05 1,96 1,50 1,28 3,32 2,56 2,01 5,64 5,09 4,63
Tabela 4.4: Valores deN M A para o gr´afico T2
4. 4 D es em p en h o d o gr ´afi co T 2 so b au to co rr ela ¸c˜a o co m n ov os lim it es d e co n tr ole 35
ρ= 0,3
LC 10,63 10,59 10,61 16,30 16,45 16,48 24,04 25,09 25,68 35,54 40,03 43,12 N M A
n= 3 n = 4 n= 5 n = 3 n= 4 n = 5 n = 3 n= 4 n = 5 n= 3 n= 4 n = 5 δx δy φ = 0,0 φ= 0,3 φ= 0,5 φ= 0,7
0 0 198,56 196,86 197,08 201,08 202,63 199,32 198,8 196,2 198,09 198,08 196,04 196,79 0 0,5 53,65 39,19 32,59 115,6 97,34 84,39 148,96 145,26 140,3 163,22 166,12 165,75 0 1 10,21 6,82 5,09 29,99 20,66 12,84 73,52 59,36 44,01 116,09 109,35 101,04 0 1,5 3,09 2,21 1,68 7,46 4,44 2,99 22,29 14,38 9,29 63,27 49,54 43,32 0,5 0 55,08 42,03 35,77 58,08 49,35 41,77 71,03 67,35 58,8 85,99 85,76 88,2 0,5 0,5 26,07 19,18 13,21 42,37 32,68 26,04 62,8 53,52 44,32 79,15 77,06 76,39 0,5 1 7,79 4,92 3,54 16,28 12,09 7,74 33,36 25,84 20,2 55,47 56,25 49,31 0,5 1,5 2,8 1,86 1,49 6,16 3,75 2,48 15,38 9,89 6,66 33,58 28,73 23,15 1 0 10,94 6,66 4,79 12,64 10,18 7,45 19,49 16,04 13,57 26,36 26,45 25,83 1 0,5 7,33 4,74 3,39 10,82 8,61 6,01 17,52 13,11 11,59 24,95 22,89 21,73 1 1 3,68 2,48 1,92 6,4 4,42 3,35 11,48 8,73 7,11 19,65 18,3 15,62 1 1,5 1,92 1,43 1,25 3,36 2,25 1,67 6,36 4,5 3,49 12,89 11,12 10,29 1,5 0 3,32 2,24 1,69 4,61 3,4 2,51 6,54 5,5 4,78 9,72 9,78 9,3 1,5 0,5 2,8 1,93 1,49 3,88 2,94 2,28 6,07 5 3,98 9,67 9,14 8,3 1,5 1 1,95 1,45 1,2 2,95 2,16 1,75 4,7 3,84 3,19 7,72 7,21 6,68 1,5 1,5 1,41 1,15 1,05 1,99 1,54 1,29 3,28 2,55 2,02 6,13 5,36 4,34
Tabela 4.5: Valores deN M A para o gr´afico T2
4. 4 D es em p en h o d o gr ´afi co T 2 so b au to co rr ela ¸c˜a o co m n ov os lim it es d e co n tr ole 36
ρ= 0,5
LC 10,62 10,58 10,60 16,35 16,45 16,52 24,02 25,15 25,69 35,62 40,06 43,26 N M A
n= 3 n = 4 n= 5 n = 3 n= 4 n = 5 n = 3 n = 4 n= 5 n = 3 n= 4 n = 5 δx δy φ = 0,0 φ= 0,3 φ = 0,5 φ= 0,7
0 0 202,26 195,54 201,18 199,45 199,2 197,93 196,7 202,26 200,97 200,48 197,83 196,42 0 0,5 57,29 39,72 35,22 111,7 96,2 81,4 150,8 157,1 138,7 177,41 162,89 161,72 0 1 11,29 6,74 5,07 28,74 18,96 13,86 71,37 56,21 48,4 119,25 109,21 95,19 0 1,5 3,23 2,22 1,62 7,53 4,53 2,98 22,9 14,24 9,5 58,91 50,36 41,86 0,5 0 51,26 41,14 34,36 60,37 49,28 43,59 71,97 65,61 58,2 89,01 90,3 83,48 0,5 0,5 25,59 18,89 13,53 40,2 32,87 25,92 63,24 52,64 48,1 80,96 76,31 74,26 0,5 1 8 4,89 3,56 17,16 11,22 7,81 37,38 27,06 21,16 56,46 56,62 49,38 0,5 1,5 2,66 1,95 1,49 5,48 3,64 2,5 14,59 9,31 6,68 32,52 27,98 25,47 1 0 10,28 6,44 5,03 13,35 10,22 8,27 20,07 15,74 13,77 26,65 26,19 24,25 1 0,5 8,03 4,98 3,62 11,34 7,99 6,27 17,47 13,56 11,49 24,79 23,95 23,52 1 1 3,79 2,42 1,93 6,24 4,52 3,31 11,65 9,15 7,38 19,75 18,77 17,93 1 1,5 1,9 1,43 1,2 3,42 2,27 1,73 6,39 4,35 3,56 12,6 12,1 11 1,5 0 3,15 2,15 1,61 4,6 3,28 2,64 6,65 5,6 4,76 10,18 9,67 9,79 1,5 0,5 2,64 1,85 1,52 3,92 2,99 2,34 6,14 4,87 4,1 9,68 9,01 8,5 1,5 1 2,03 1,42 1,23 3,11 2,14 1,74 4,83 3,76 3,01 8,16 7,75 6,87 1,5 1,5 1,45 1,16 1,06 1,94 1,53 1,27 3,24 2,52 2,08 5,89 5,11 4,58
Tabela 4.6: Valores deN M A para o gr´afico T2
4. 4 D es em p en h o d o gr ´afi co T 2 so b au to co rr ela ¸c˜a o co m n ov os lim it es d e co n tr ole 37
ρ= 0,7
LC 10,57 10,59 10,61 16,32 16,49 16,51 23,98 25,08 25,69 35,68 40,11 43,19 N M A
n= 3 n = 4 n= 5 n = 3 n= 4 n = 5 n = 3 n= 4 n = 5 n= 3 n= 4 n = 5 δx δy φ = 0,0 φ= 0,3 φ= 0,5 φ= 0,7
0 0 196,02 198,77 199,01 197,71 195,6 203,94 196,18 197,12 199,53 199,17 200,11 197,69 0 0,5 55,89 40,61 35,36 111,5 98,3 82,5 147,84 144,66 132,54 173,09 175,74 166,29 0 1 11,2 6,65 5,05 30,64 18,98 13,98 72,83 59,03 43,79 117,93 107,33 102,81 0 1,5 3,35 2,15 1,65 7,33 4,45 3 22,35 14,43 9,11 58,21 51,92 43,77 0,5 0 61,05 42,51 32,79 62,26 48,82 43,03 74,37 67,74 58,21 93,86 88,42 86,11 0,5 0,5 26,27 18,61 13,42 43,59 32,21 26,52 60,45 53,53 45,85 78,23 76,48 77,2 0,5 1 7,88 5,13 3,67 16,56 11,65 7,9 34,51 27,83 20,98 58,23 55,17 51,1 0,5 1,5 2,77 1,95 1,52 6,09 3,59 2,56 13,71 9,82 6,73 34,53 28,04 24,62 1 0 10,62 6,78 4,85 13,45 10,19 7,76 19,43 16 13,66 28,4 26,39 24,94 1 0,5 7,63 5,05 3,67 10,95 8,49 6,52 17,34 13,56 11,87 25,26 24 22,58 1 1 3,86 2,49 1,94 7,05 4,65 3,33 11,25 8,77 6,86 19,88 18,72 16,96 1 1,5 1,89 1,47 1,21 3,33 2,28 1,69 6,53 4,62 3,45 12,6 11,56 9,71 1,5 0 3,2 2,25 1,62 4,55 3,29 2,55 6,44 5,46 4,56 9,81 9,65 9,04 1,5 0,5 2,73 1,94 1,47 3,86 3,11 2,36 6,1 4,97 4,29 9,61 9,59 8,45 1,5 1 1,88 1,43 1,21 3,04 2,17 1,78 4,74 3,53 2,97 7,85 7,26 7,04 1,5 1,5 1,41 1,16 1,07 2,04 1,54 1,25 3,24 2,52 1,99 5,8 5,25 4,46
Tabela 4.7: Valores deN M A para o gr´afico T2
4.4 Desempenho do gr´afico T2
sob autocorrela¸c˜ao com novos limites de controle 38
Observa-se nos resultados desta simula¸c˜ao que autocorrela¸c˜ao prejudica o desem-penho do gr´afico de controle, levando uma diminui¸c˜ao no seu poder de detec¸c˜ao. Nas tabelas acima ´e poss´ıvel perceber claramente que `a medida que aumenta o valor da autocorrela¸c˜ao aumenta consideravelmente os valores obtidos do NMA. Quando ocorre um aumento de φ = 0 para φ = 0,3 percebe-se que j´a prejudica o desempenho do gr´afico. Para umρ = 0,0, n= 3 e deslocamentos de δx = 0,5;δy = 0,5 temos um au-mento de NMAs de N M A= 26,72 para umN M A= 41, 51, ou seja, a sinaliza¸c˜ao no gr´afico fica mais tardia, pois este processo est´a sob a presen¸ca de uma autocorrela¸c˜ao deφ= 0,3.
Uma forma encontrada para melhorar o desempenho nesse processo multivariado para um valor pequeno de autocorrela¸c˜ao seria aumentar o tamanho da amostra. Ve-jamos quando nas tabelas consultamos o valor do NMA para uma amostra de n = 5,
δx = 0,5, δy = 0,5 e ρ = 0,0 o N M A = 25,14 ´e muito pr´oximo do valor do