Otimização Bi-Objetivo Apliada à
Estimação de Parâmetros de Modelos
Não-Lineares: Caraterização e Tomada
de Deisão.
Tese submetida à banaexaminadora designada pelo Colegiado do
Programade Pós-Graduaçãoem Engenharia Elétriada Universidade
Federal de Minas Gerais, omo parte dos requisitos neessários àobtenção
do grau de Doutor em Engenharia Elétria.
Programa de Pós-Graduação em Engenharia Elétria
Centro de Pesquisa e Desenvolvimento em Engenharia Elétria
ser diferente e ter os mesmos direitos"
A identiaçãode sistemas ompreende um onjunto de ténias para a
modelagemde sistemas dinâmios. Essas ténias, normalmente, são
lassi-adasde aordo oma utilizaçãoounão de informaçõesontidas emdados
medidos. De maneirageral,a identiaçãode sistemaspode ser divididaem
ino partes, destaando-se: (i) esolha de representação, (ii) deteção de
estrutura, (iii)estimação de parâmetros e (iv) validação do modelo. A
teo-riabásiaenontra-semuitobemfundamentadaeomumgrandenúmerode
trabalhosqueautilizaomobaseparaodesenvolvimentodeferramentas
ma-temátiaseomputaionais. Adeteçãodeestrutura,lassiamente,utilizaa
análisederesíduos, ouseja,errodeumpasso àfrente, omoíndiede
desem-penho. Emboraaindasejamlargamenteutilizados,algunstrabalhossugerem
que tais ferramentas apresentem ompensaçãoa prováveis erros estruturais,
ou seja, a erro na esolha dos regressores. É sugerido, a partir disso, que
sejamutilizadosíndiesbaseados noerro desimulaçãoenãoresidual. O
pre-sente trabalho pretende abstrair tais sugestões para o aso da estimação de
parâmetros,utilizandoum estimador bi-objetivo,emque aetapa de deisão
utilize análise do erro de simulação do modelo omo índie de desempenho.
A estrutura será onsiderada onheida. Este trabalhotem porobjetivo
ar-gumentar, om base em simulações e análise matemátia, que estimadores
bi-objetivo,omertasaraterístiasestruturais,taisomo,linearidadenos
parâmetrose onvexidade,são apazes de retornarum onjuntode modelos,
que apresente distribuição estatístia semelhanteaestimadores tradiionais.
Apartirdisso, serádemonstradotambémqueépossíveldeterminarqualdos
modelos apresentavaloresde parâmetros mais próximodos valores reais, ou
seja, não-polarizados. Essa deisão éfeita através de ténias de orrelação.
Váriosexemplos no deorrer dotexto serão utilizados para validar as
téni-as desenvolvidas. A araterização e a tomada de deisão de estimadores
The system identiation onsists of a group of tehniques for dynami
system modeling. Usually, these tehniques are lassied aording to the
use or not of information presented in measured data. Generally, the
sys-tem identiationis omposed by four parts: (i)seletion of representation,
(ii) struture detetion, (iii) parameters estimation and (iv) model
valida-tion. Thebasitheory iswellstruturedandthere isonsiderablenumberof
worksthatuse thistheorytodevelopmathematialandomputationaltools.
Normally, the analysis of residues, that is the one step ahead error, is used
forstruture detetion asperformaneindex. Although thisapproahisstill
used,someworkssuggestthatthispresentsaninlinationtostruturalerror.
Inthis work,itissuggested, thatthese indexesare usedbasedonsimulation
error and not residual. The present work intends to use a bi-objetive
ap-proah to parameter estimation. The analysis of the simulationerror of the
modelisused asperformane index inthe deisionstage. The struturewill
beonsideredknown andequaltothesystem. Thisworkaimstoplead,with
base insimulationsand mathematialanalysis, that bi-objetive estimators,
with ertain strutural harateristis, suh as, linearity in the parameters
and onvexity, are able toyielda set of models, whihare statially similar.
Itisalsopossibletoestimatethelosestparameterstorealvaluesofthe
mo-dels. These estimated parameters are unbiased. The deision stage is taken
intoaountbymeansoforrelationtehniques. Severalexamplesinthetext
are used tovalidatethe developed tehniques. The haraterization and the
deision stage of bi-objetive unbiased estimatorare the main ontributions
Em Assim falou Zaratustra, Nietzshe esreve: Retribui-se mal a um
mestre, quando se permanee sempre um disípulo. Esse trabalho então é
uma retribuiçãoaos meu amadosmestres, que sempreestiveram dispostos a
metransformaem alguémomapaidaderítianeessáriaparaandarom
as própriaspernas. Osmeus mestres são:
Meus pais MariaAliee IvanBarroso, minha irmã MariaAída.
Minha querida esposa Marinês e meus adoráveis unhados Kim, Roney,
Robson, Ranieri. Minha sogra, Inêz.
Meuquerido,amadoerazãomaiordemeuresimento,Murilo,meulho.
Meus Professores: Eduardo Mendes (Zeus), Rodney Saldanha, Riardo
Takahashi e LuisAguirre, fundamentais.
Osgrandesseres: EriveltonNepomueno,GleisonAmaral,Alex(Shmoo),
Ânderson Barbosa, Dair, Mara, Alides Volpato, Tia Maria do Carmo, Tio
Mauro, o asal MariaCláudiae Maro Antnio.
Meus irmãos dooração RafaelLopes(Torinha)e RudimarPatroínio.
Retribuo ainda aoProfessor Carlos Martinez,aos membros doMACSIN
e do CPH, aos funionários e professores do CPDEE, CPH e aos membros
daBana designada peloColegiado do PPGEE.
Aosque não menionei, espero que meperdoem...
Agradeço a toda força que, inexpliavelmente, me orientou, reeba ela o
Resumo v
Abstrat vii
Agradeimentos ix
Nomenlatura xxi
Abreviações xxiii
1 Introdução 1
1.1 OBom Modelo . . . 2
1.2 Motivação eObjetivos . . . 3
1.3 Estrutura daTese . . . 4
I Base Teória 7 2 Identiação de Sistemas Não-Lineares 9 2.1 Introdução . . . 9
2.2 Identiaçãode Sistemas . . . 9
2.3 Experimentação doSistema . . . 10
2.4 Deteçãode Não-Linearidades . . . 11
2.5 Esolhade Representação ede Estrutura . . . 11
2.5.1 Deteção de estrutura . . . 13
2.5.2 Deteção de estrutura utilizandoERR . . . 13
2.5.3 Critériode informaçãode Akaike . . . 14
2.6 Agrupamentos de Termos e Coeientes de Agrupamentos . . 15
2.6.1 Agrupamentoespúrio emmodelos polinomiais . . . 16
2.7 PontosFixos emSistemasAutnomos. . . 16
2.7.1 Pontos xosem sistemasnão autnomos . . . 17
2.9 Estimação de Parâmetros. . . 19
2.9.1 Propriedades Estatístias do Estimador de Mínimos Quadrados . . . 21
2.9.2 Mínimosquadrados estendidos . . . 22
2.9.3 Regularização . . . 23
2.10 Validaçãodo Modelo . . . 24
2.11 Comentários Finais . . . 25
3 Identiação Multi-objetivo 27 3.1 O ProblemaMultiobjetivo . . . 27
3.2 Formulação doProblemaMultiobjetivo . . . 28
3.2.1 Determinaçãodas Soluções Eientes . . . 28
3.2.2 Etapa de Deisão . . . 29
3.3 Estado da Arte . . . 30
3.3.1 ComparaçãoEntre os Tiposde Modelagem . . . 31
3.3.2 Retrospetiva História . . . 32
3.4 Comentários Finais . . . 38
II Contribuições Propostas 39 4 Tomada de Deisão 41 4.1 Motivação . . . 41
4.2 Robustez aoruído . . . 43
4.2.1 EsolhaNão-Polarizada . . . 47
4.3 Deisor de Correlação . . . 52
4.4 Comentários . . . 55
5 CaraterizaçãodoEstimadorMultiobjetivo: oParetoÓtimo 57 5.1 Preliminares . . . 57
5.1.1 GeraçãodoConjuntoPareto-Ótimo . . . 59
5.1.2 Esolhados Funionais . . . 60
5.2 PolarizaçãoemEstimadores Bi-Objetivo . . . 61
5.2.1 Modelos de erro na equação de regressão . . . 61
5.2.2 Resultados Simulados. . . 65
5.2.3 Modelos de erro na saída . . . 69
5.2.4 Resultados Simulados. . . 73
III Apliações 83
6 Identiação de Dois Sistemas Piloto 85
6.1 Identiaçãode um Conversor Estátio . . . 85
6.1.1 Introdução . . . 85
6.1.2 Osistema . . . 86
6.1.3 Teste Dinâmio . . . 86
6.1.4 Caraterístiaestátia . . . 88
6.1.5 Identiaçãodo Conversor . . . 89
6.2 Identiaçãode um Aqueedor . . . 92
6.2.1 Desrição doSistema . . . 93
6.2.2 Teste Dinâmio . . . 93
6.2.3 Teste Estátio . . . 95
6.2.4 Resultados . . . 96
6.3 Conlusões. . . 101
7 Identiação de um Sistemade Bombeamento mais Turbina103 7.1 Desrição doProesso . . . 103
7.1.1 Ensaios dinâmios. . . 106
7.1.2 Ensaios estátios . . . 108
7.1.3 Identiaçãodo Sistema . . . 108
7.1.4 Conlusões. . . 116
8 Comentários Finais e Proposta para Trabalhos Futuros 117 8.1 Quanto aoDeisor . . . 117
8.1.1 Trabalhosfuturos . . . 118
8.2 Quanto aoPareto-Ótimo . . . 118
8.2.1 Trabalhosfuturos . . . 119
8.3 Apliaçãoem Controle . . . 119
4.1 Comparaçãoentreosvaloresdaequação(4.8)paraosmodelos
1,2, 3e 4. . . 51
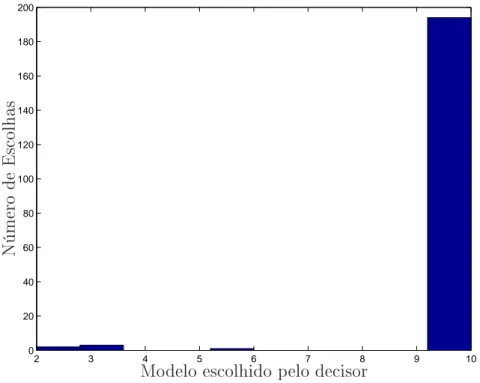
5.1 Resumo dos índies estatístios das esolhas do deisor para
as200 realizaçõesdoerro e(k). . . 66
5.2 Média e Desvio padrão dos parâmetros estimados pelo
esti-madorbi-objetivo. Calulando amédia das 20000realizações
om 1% doruído e(k). . . 78
5.3 Média mais desvio-padrão dos parâmetros estimados pelo
es-timador bi-objetivo (EBO), Mínimos Quadrados Estendidos
(MQE) eVariáveisInstrumentais (VI). . . 79
6.1 Parâmetrosdomodelo(6.3)estimadospeloestimadorbi-objetivo. 91
6.2 Desempenho do modelo (6.3) peloíndie RMSE. . . 91
6.3 Desempenho domodelo (6.3) peloíndie RMSEe número de
parâmetros(NP) emomparação aoutros modelos. . . 92
6.4 Comparaçãoentre modelosujosparâmetrosforamestimados
utilizandoinorporaçãode onheimentoauxiliarnaetapa de
estimação de parâmetros, segundo o ritérioRMSE. . . 100
7.1 Tabela de omparação de valores de MAPE para os modelos
identiados. . . 110
7.2 Tabela de omparação de valores de MAPE para os modelos
identiados. . . 113
7.3 Tabela de omparação de valores de MAPE e número de
4.1 Índie RMSEpara várias realizaçõesde ruído. . . 44
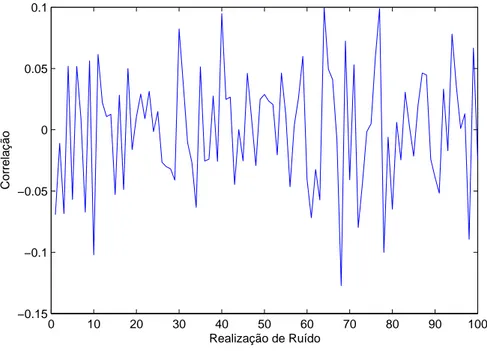
4.2 Correlaçãoentre erro de prediçãoe simulaçãolivredomodelo
para as100 primeiras realizaçõesde ruído. . . 47
4.3 Saídasimuladado Modelo 1emomparaçãoaos dados de
va-lidação do sistema, sendo que o traço ontínuo é usado para
representarosdadosde validaçãoeospontos()asaída
simu-lada domodelo. . . 49
4.4 Saídasimuladado Modelo 2emomparaçãoaos dados de
va-lidação do sistema, sendo que o traço ontínuo é usado para
representar osdadosde validaçãoeospontos()asaída
simu-lada domodelo. . . 50
4.5 Saídasimuladado Modelo 3emomparaçãoaos dados de
va-lidação do sistema, sendo que o traço ontínuo é usado para
representarosdadosde validaçãoeospontos()asaída
simu-lada domodelo. . . 50
4.6 Saídasimuladado Modelo 4emomparaçãoaos dados de
va-lidação do sistema, sendo que o traço ontínuo é usado para
representar osdadosde validaçãoeospontos()asaída
simu-lada domodelo. . . 51
4.7 Histograma de um estimador polarizado tomadas 2000
reali-zações, om
1
= 0;7, tendo média-1,60 e variânia 2. . . 53
4.8 Histograma de um estimador polarizado tomadas 2000
reali-zações, om
2
=0;5, tendo média0,50 e variânia 1. . . 54
4.9 Comparação entre a simulação do modelo ujos parâmetros
foram esolhidos pelo deisor () e os dados gerados pela
re-presentação (4.20) (). . . 54
5.1 Valor de jj 1
N P
e
2
jj emrelação aonúmero de experimentosN. 62
5.2 Histogramadosmodelosesolhidos pelodeisoremada uma
5.3 Histograma para o parâmetro
1
estimado, para as 200
reali-zações doerro e(k),ujo valorreal é
1
=0;1. . . 67
5.4 Histograma para o parâmetro
2
estimado, para as 200
reali-zações doerro e(k),ujo valorreal é
2
= 0;01. . . 67
5.5 Histograma para o parâmetro
3
estimado, para as 200
reali-zações doerro e(k),ujo valorreal é
3
= 0;03. . . 68
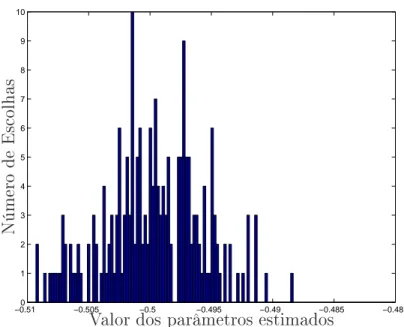
5.6 Histograma para o parâmetro
4
estimado, para as 200
reali-zações doerro e(k),ujo valorreal é
4
= 0;50. . . 68
5.7 Histograma para o parâmetro
5
estimado, para as 200
reali-zações doerro e(k),ujo valorreal é
5
=1;00. . . 69
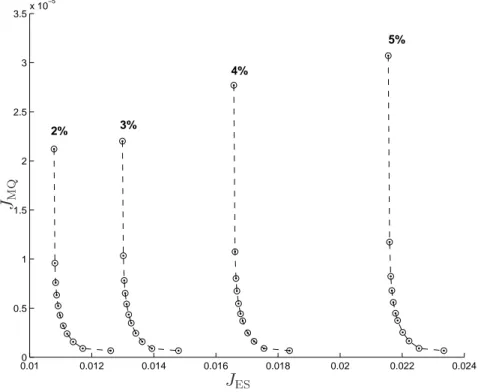
5.8 ConjuntoParetodos modelosque foramestimados utilizando
assériestemporais,om desviopadrãodoerro desaída de2%
até 5%.. . . 74
5.9 As guras mostram a orrelação entre (equação 4.4) e y^
(saída em simulação livre), alulado usando a equação (4.5)
para modelo que é representado na Figura5.8. O número de
ada modelo no onjunto Pareto ontado da esquerda para a
direita para ada nívelde ruído: (a)2%, (b) 3%, () 4%, and
(d) 5%.. . . 75
5.10 Histograma de 20000 valores estimados doprimeiro elemento
em . (MQ) india valores alulados pela minimização de
J
MQ
. As soluções de J
ES
são indiados por (ES). Finalmente,
osparâmetros seleionadosusandoodeisorde mínima
orre-laçãosãoindiadospor(DC).Overdadeirovalordoparâmetro
é
1
=1;1031. . . 76
5.11 Histograma de 20000 valores estimados do segundo elemento
em . O verdadeiro valordoparâmetro é
2
=0;0160. . . 77
5.12 Histograma de 20000 valores estimados do tereiro elemento
em . Overdadeiro valordoparâmetro é
3
=0;0404: . . . . 77
5.13 Histograma de 20000 valores estimados do segundo elemento
em . Overdadeiro valordoparâmetro é
4
= 0:2057: . . . 78
5.14 Histograma de 500 valores estimados pelo Estimador de
Mí-nimos Quadrados Estendidos do parâmetro
1
. O verdadeiro
valordoparâmetro é
1
=1;1031: . . . 80
5.15 Histograma de 500 valores estimados pelo Estimador de
Va-riáveis Instrumentaisdo parâmetro
1
. O verdadeiro valordo
parâmetro é
1
=1;1031: . . . 81
6.1 Conversor buk . . . 86
6.4 Dadosestátios- Buk . . . 89
6.5 Conjunto Pareto-Ótimo para a estrutura (6.3), sendo que o modelo esolhido foi odéimo de ima para baixo. . . 90
6.6 Diagramaem bloos funionaisdo sistema(aqueedor). . . 93
6.7 Dadosde identiação -Aqueedor . . . 94
6.8 Dadosde validação- Aqueedor . . . 95
6.9 Dadosestátios- Aqueedor . . . 96
6.10 Conjunto Pareto-ótimo para omodelo (6.4). . . 98
6.11 Validação Dinâmia- Aqueedor. . . 99
6.12 Validação Estátia- Aqueedor . . . 100
7.1 Sistemade bombeamento de água. . . 104
7.2 Conjunto turbinamais gerador. . . 105
7.3 Sinalde entrada utilizadonaidentiaçãodo sistema. . . 107
7.4 Sinalde saída utilizadona identiaçãodo sistema. . . 107
7.5 Curva araterístiaemestado estaionário dosistema. . . 108
7.6 Conjunto Pareto-Ótimo para a estrutura (7.1). O deisor es-olheuo quarto modelo, de ima para baixo noPareto. . . 111
7.7 Saída simulada do modelo (7.1), ujos parâmetros foram ob-tidos via estimador bi-objetivo, sendo que o traço ontínuo é asaída do sistemareal e o ()é asaída simulada domodelo. . 112
7.8 Curva araterístia do modelo ujos parâmetros foram obti-dos via estimador bi-objetivo, sendo que o traço ontínuoé a urva dosistema real e o() é aurvado modelo. . . 112
7.9 Conjunto Pareto-Ótimo para a estrutura (7.4). O deisor es-olheuo tereiromodelo, de ima para baixo noPareto.. . . . 114
7.10 Saídasimulada domodelo(7.4), sendo queo traçoontínuoé asaída do sistemareal e o ()é asaída simulada domodelo. . 114
yy
Funçãode autoorrelaçãolinear
y 2
y
2 Funçãode autoorrelaçãonão-linear
E [:℄ Operadoresperança matemátia
m
Atraso da função de autoorrelação
T
s
Tempode amostragem
F `
Funçãogenéria om grau de não-linearidade`
y(k i) Regressor de saída
u(k j) Regressor de entrada
e(k) Inerteza matemátia
n
y
Máximoatraso doregressor de saída
n
u
Máximoatraso doregressor de entrada
n
e
Máximoatraso doregressor de ruído
d Atraso puro de tempo
k Tempodisreto
i
Parâmetro do modelo NARX polinomial
Vetor de parâmetros
Var: Variânia matemátia
(k) Erro de modelagem
J Funçãousto genéria
y p
u m p
Agrupamentode termos
y p
u
m p Coeientede agrupamento etermos
Matriz de regressores
Matriz de regressores estendida
Vetor de parâmetros estendido
S Mapeamento linear
z Domíniodafreqüênia omplexo
NARX Modelos não-lineares auto-regressivos
om entradasexógenas
MQ Mínimosquadrados onvenionais
MQE Mínimosquadrados estendidos
RMSE Raízdoerro médio quadrátio
MQR Mínimosquadrados restritos
Introdução
A neessidade de se entender e até mesmo de se reproduzir fenmenos
físiosfoi um grandeimpulso para o desenvolvimento daiênia e da
teno-logia.
Amodelagemmatemátia,omoferramentaparareproduçãodo
ompor-tamento aproximado de fenmenos físios, vem se destaando nas últimas
déadas, sejaparaanalisarasrelaçõesde ausaeefeitoemdadosobservados
(Weyer et al., 2000; Miyano et al., 2000), seja para o desenvolvimento de
ontroladores(Gu,1994;SmithandDoyle,1992;Makilaetal.,1995;Simutis
etal.,1997;Agarwal,1997;Demiranetal.,1999;Lee,2000). Justiadopela
omplexidade dos modelosnão-lineares, os modelos lineares são muito
utili-zados para representar o omportamento de sistemas emuma faixa restrita
de operação. Osmodeloslinearesforamimportantesparaodesenvolvimento
damodelagempoispermitiramo entendimentoloaldos fenmenos.
Com odesenvolvimentotenológio,prinipalmentenaárea
omputaio-nal, foi possível o desenvolvimento de ténias de modelagemnão-lineares.
Outras representaçõesforamsurgindoom opassardos anos. Nadéada
de oitenta, destaa-se o apareimento dos modelos NARMAX polinomiais
(Leontaritisand Billings,1985a)e raionais(Billingsand Chen, 1989).
Um dos problemas mais itadosnaliteraturaéa diuldadena etapade
esolhadeestrutura. Comointuitodepesquisaresseproblema,vários
traba-lhos forampubliados (Haber and Unbehauen, 1990; Breeden and Pakard,
1994;MaoandBillings,1997;Abonyietal.,2000). Em(AguirreandBillings,
1995),porexemplo, osautoresdisutem oproblema de sobreparametrização
emmodelos não-lineares utilizandorepresentações polinomiais.
Outra maneirade seontornaresse problema éainorporaçãode
onhe-imentoauxiliaraomodelonasetapasdeesolhade estruturaeestimaçãode
parâmetrosdomodelo. Talonheimentopermiteaesolhadeumaestrutura
rela-ções físias, limites operaionais, entre outros. O que se tem onheimento
naliteratura, no entanto, éa imposição de onheimento emuma estrutura
genéria, sem a preoupação de detetar nessa a maneira na qual o
onhe-imento auxiliaré representado (Herbert and Tulleken, 1993; Sjöberg et al.,
1995;Bohlin and Graebe,1995).
1.1 O Bom Modelo
Otrabalhode Duong and Landau(1994)omeçafazendo aseguinte
ar-mação: A proposta da validação de modelo é veriar se o modelo obtido
por identiaçãoé bom, isto é, veriar se os parâmetrosdo modelopodem
ser onsiderados omo oinidentes om os parâmetros reais do sistema.
Essa armação é importante do ponto de vista losóo pois o bom
modelo requer o onheimento do próprio sistema. O que não é totalmente
fatível por vários aspetos, por exemplo, nem sempre é possível onheer
maisdoqueosdadosdeentradaesaídadosistema. Muitasvezesosproessos
sãotãoomplexosqueautilizaçãodasleisfísiasqueregemoproesso
torna-sepouoatraente(Pottmann and Pearson, 1998).
Entãoobommodelopartedeumproblemainiial,queéadeterminação
de sua estrutura. Para os parâmetrosserem oinidentes om os parâmetros
reais, signia que exista uma oinidênia entre a estrutura do modelo e
a do sistema. Pode-se dizer então que problemas na estrutura do modelo
sejam tão importantes quanto o problema da estimação dos parâmetros e
sua validação.
No aso de modelos obtidos a partir da físia do proesso, o problema
estruturalestá amarrado àssimpliaçõesneessárias aada apliação,uma
vez que nem sempre é possível se obter todas as variáveis do sistema. No
aso de modelos obtidos por ténias aixa-preta, ou seja, baseadas apenas
nos dados medidos de entrada e saída, o problema reside na qualidade e
na quantidade dos dados. Essas onsiderações também são pertinentes no
que dizrespeito à estimação dos parâmetros (Pottmann and Pearson,1998;
Lindskogand Ljung, 1995b;Garia, 1997).
Em uma esala evoluionária pode-se onsiderar que naturalmente os
trabalhos mais reentes se preoupam em utilizar todas as informações
dis-poníveis, sejamelas obtidasnos dados de entrada e saída dosistema, sejam
elas obtidasnafísia doproesso. Essa abordagemreebe onome de
identi-açãoaixa-inza(Herbert and Tulleken, 1993; Sjöberg etal.,1995; Bohlin
and Graebe, 1995; Garia, 1997; Jorgensen and Hangos, 1995). Vários
1993; Eskinat et al., 1993; Lorito, 1998; Wang and Sheu, 2000; Johansen,
2000; Aguirre etal.,2000; Piroddi and Spinelli,2003).
Emmuitos problemas,asinformaçõesauxiliaresutilizadas, sob formade
restriçãoe/oupenalidade,geramproblemasdesobreparametrização(Aguirre
et al., 2000) ou estruturalmente apresenta problema de polarização nos
es-timadores de parâmetros utilizados (Barroso, 2001; Barroso et al., 2002;
Aguirre etal., 2004).
A esolha da informaçãoauxiliar a ser utilizada já é um problema, uma
vez quedepende daapliaçãodomodelo. Porexemplo, muitas vezes
deseja-se queo modelo não apenas reupere aspetos dadinâmia dosistema,mas
também seja apaz de reuperar araterístias emestado estaionário, tais
omo ponto xo, ganho e urva estátia (Grebliki, 1996; Pottmann and
Pearson, 1998; Hippe and Wurmthaler, 1999; Pearson and Pottmann, 2000;
Aguirre et al., 2000; Nepomueno et al., 2003, 2004; Aguirre et al., 2004).
De maneira geral, a reuperação das araterístias dinâmias e estátias
paree onitante. Alguns trabalhos sugerem a apliaçãode métodos
multi-objetivo (Nepomueno, 2002; Nepomueno et al., 2003; Ruano et al., 2003;
Nepomueno etal.,2004; Maertens et al.,2004; Andersonet al.,2005).
1.2 Motivação e Objetivos
Uma grande diuldade na identiação aixa-preta é garantir que os
dados utilizadosna esolha de estrutura eestimação de parâmetros tenham
todas as informações neessárias para que as ferramentas utilizadas sejam
eientes (Tulleken, 1993; Herbert and Tulleken, 1993).
Na prátia,testes para obtenção de dadosde identiaçãoestão
amarra-dos aos limitesoperaionais do sistemaa ser modelado. Emsistemas
indus-triais,porexemplo,nãoédesejávelqueaproduçãosejainterrompidaparase
efetuartestesparaoletade dados. Namaioriadasvezesosinaldeexitação
do sistema é variado em uma pequena faixa de amplitude e freqüênia.
Es-truturas eparâmetros estimados apartir de dados om essas araterístias
sóserãoapazes derepresentar, emgeral,osistemanafaixade operaçãodos
dados (Aguirre,2000).
Nointuitode seontornarafaltadedadosqueabranjamtodosospontos
deinteressedosistema,váriasténiastêmsidoapliadas. Oonjuntodestas
ténias,denominadasdeIdentiaçãoCaixa-Cinza,temomoaraterístia
inorporar onheimento,quenão seenontramdabasede dadosdinâmios,
para ompensar a limitação de informação. Um resumo geral do estado da
zaminformaçãoauxiliarnaestapadeestrimaçãodosparâmetrosomo
restri-çõese/oupenalidades,éadualidadeajusteestátiodinâmio. Observa-se
que a melhoriana apaidade de reuperação estátia do modelo tem omo
usto a piora da apaidade dinâmia e vie-versa, o que não é um aspeto
atrativonestasténias,umavezqueessasaraterístiasdevemoexistirno
sistemareal. Seessadualidadefortratadaomoumproblemamulti-objetivo
(Johansen,2000), aredita-sepoder utilizaressa formulaçãopara amelhoria
dosresultados(Takahashietal.,1997,2000),umavez queháumtratamento
losoamente diferente, em relação às ténias que utilizam restrições,
se-jam elas na estimação dos parâmetros ou na esolha de estrutura (Barroso
etal.,2002).
As ténias multiobjetivo têm mostrado resultados que, em omparação
om análogos mono-objetivo, são animadores. Sobre dois aspetos as
téni-as multiobjetivo ainda apresentam problemas que mereem a atenção: (i)
métodoparageraçãodosmodelosandidatos,ouonjuntoPareto-ótimo. (ii)
ritério de deisão para esolha do bom modelo, entre os possíveis do
Pa-reto. Em identiação de sistemas, prinipalmente, não se tem ainda ao
ertoumestudosobre ageraçãodos modelosandidatos,noquedizrespeito
àpolarizaçãoeàvariânia. Geralmenteosritériosde deisãobaseiam-seem
alguma medida dos resíduos de identiação (Nepomueno, 2002;
Nepomu-eno et al., 2003; Ruano et al., 2003; Nepomueno et al., 2004; Arroyo and
Armentano, 2005; Lagaros etal., 2005).
Opresentetrabalhotemporobjetivoestudar,pormeiodeexemplos
simu-ladosereais,algunsaspetosdoestimadorbi-objetivotaisomo: polarização,
robustez a ruídoe ritério de deisão.
AsontribuiçõespropostassãoaaraterizaçãodoonjuntoPareto-ótimo
eum ritériode deisão que sejaapaz de esolher o bom modelo.
1.3 Estrutura da Tese
Este trabalhoestá dividido em três partes, a primeiraque diz respeito à
revisão teória e bibliográa sobre identiação de sistemas aixa preta e
do estado da arte emidentiação aixa-inza mono e multiobjetivo. Esses
assuntosestãodivididosem doisapítulos: oapítulo2refere-seà
identia-çãode sistemasaixa-pretapara modelospolinomiaisdisretos. Oapítulo3
apresentadenições preliminares em identiaçãomultiobjetivo e apresenta
oestado daarte emidentiação aixa-inzamono emultiobjetivo.
A segunda parte deste trabalho é dediada às ontribuições propostas.
desenvolvido e a implementação do deisor. O apítulo 5 apresenta a
a-raterizaçãodoestimadorbi-objetivoproposto eum estudosobreestimativa
não-polarizada.
A tereiraparteéompostade apliaçõesemsistemasreais. Noapítulo
6émostrada aapliaçãoemdois sistemasreais,um sistemade aqueimento
om temperaturavariáveleum onversorDCDC dotipoBuk. Noaso do
onversor Buk, osdados dinâmiosestão limitadosa uma pequenafaixa de
operação, quando omparados aos possíveis pontosde operação do sistema.
Esse exemploreal, éimportantepoisavaliao desempenhodoestimador
pro-posto em asos em que a informação auxiliar agrega informações que não
estão ontidas namassa de dados dinâmios. No apítulo7 será mostrada a
apliaçãoemum sistemade bombeamento mais turbinahidráulia.
Finalmenteno apítulo8 serão feitas as onsiderações nais sobre o
Identiação de Sistemas
Não-Lineares
2.1 Introdução
Emseuprinípio,aidentiaçãodesistemaserafeitaassumindoa
lineari-dadedossistemasaseremestudados. Essaaproximaçãoeraonsideradaboa
umavezquehaviasigniativasrestriçõesteóriaseomputaionais. Muitos
regimes dinâmios, entretanto, não podem ser araterizados por
aproxima-çõeslineares. Dentre estes regimes dinâmiospodem-se itar asbifurações,
bilinearidades,os ilos limites,aos entre outros.
Muitos trabalhos durante as últimas déadas foram publiados om a
esperançadesoluionaroumesmodisutirosproblemasdeidentiação
não-linear (Billings and Fadzil, 1985; Aström and Eykho, 1971; Akaike, 1974;
Billingsand Voon, 1984).
Oobjetivodesteapítuloéfazerumabreverevisãodaliteraturaarespeito
de identiaçãoaixa-pretade sistemasnão-lineares.
2.2 Identiação de Sistemas
Oproblemadeidentiaçãodesistemaspodeserdivididonasinoetapas
prinipaisdesritas a seguir (Ljung, 1987):
obtençãodedadosdeexperimentaçãodosistemaquesedesejamodelar;
apliaçãodetestesaosdadosobtidosparadeteçãodenão-linearidades;
estimação dos parâmetros domodelo;
validaçãodomodelo obtido.
Essas etapas são omuns tanto para sistemas lineares quanto para
sis-temas não-lineares. Nas seções seguintes será feito um breve omentário a
respeito dessas etapasom indiaçõesdabibliograa reomendada.
2.3 Experimentação do Sistema
Nestaprimeiraetapadeve-seonsiderarosistemaaserestudadoe
submetê-loa entradas predeterminadas,observando-se assaídas orrespondentes. Os
dados medidos de saída do sistema, onheidos omo dados de
identia-ção, deverão ser usados na deteção da não-linearidade e na estimação de
parâmetros domodelo esolhido.
É desejável que os sinais de exitação do sistema tenham um espetro
de freqüênias que venha a exitar persistentementea dinâmiade interesse
dosistema. Noaso de sistemasnão-lineares, issorequer que osefeitos
não-linearessejamexitadosporesses sinaiseassim estejampresentes nos dados
de identiação (Aguirre, 2000). Em sistemas não-lineares, uma pequena
variaçãonaamplitude do sinalde entradapode provoar mudanças
qualita-tivasnoomportamentodinâmiodos mesmos. Outroaspeto importanteé
aesolha dotempode amostragemdos dados de identiação.
Um proedimento muito utilizado para a esolha do melhor tempo de
amostragem dos dados de identiação é a análise da autoorrelação linear
y 0
y 0
(2.1) e não-linear (2.2)
y 2 0 y 2 0
do sinal desejado (Aguirre and Billings,
1995) y 0 y 0
()=E [(y(k) y(k))(y(k ) y(k))℄; (2.1)
y 2 0 y 2 0
()=E[(y 2
(k) y 2
(k))(y 2
(k ) y 2
(k))℄; (2.2)
em que y(k) e y 2
(k) representam os valores médios e o apóstrofe ( 0
), neste
aso, india que a média foi extraída dos sinais. Com base nas funções de
autoorrelaçãodesritas aimapode-se hegar àseguinteonstante:
m =minf y 0 ; y 2 0 g; (2.3) emque y 0
éo instante doprimeiromínimo de
y 0
y 0
() e
y 2
0
é oinstantedo
primeiromínimode
y 2 0 y 2 0 ().
m
25
s
m
5
: (2.4)
Então, se o sinal om amostragem estiverdentro dafaixa estabeleida
aima, o sinal pode ser utilizado. Caso ontrário, se o sinal estiver violando
o limite superior de (2.4), então faz-se neessário deimar os sinais até que
estes se enontrem dentro da faixa. Caso o sinal viole a restrição inferior,
será neessário repetir o teste usando-se uma maior taxa de amostragem na
aquisição dos dados.
2.4 Deteção de Não-Linearidades
Os dados de identiação devem passar por proessos de deteção de
não-linearidades. Esses testes veriam, dentro de um limite de onança
pré-determinado, se o sistema possui algumas araterístias próprias dos
sistemaslineares. Casonãosejamveriadasessaspropriedades,éneessário
então a utilizaçãode modelos não-lineares para aproximarasaraterístias
domesmo.
Porexemplo, a relaçãoabaixo (Billingsand Voon, 1983,1986)
y 2
0
y 2
0
()=E[(y 2
(k) y 2
(k))(y 2
(k ) y 2
(k))℄=0 8 (2.5)
é válida se o sistema for linear. Um intervalo delimitaa região de onança
dentrodaqual afunção de orrelaçãopode ser onsideradanula. Oslimites
deste intervalo em 95% são dados por: 1;96= p
N, em que N é o
ompri-mento do registro de dados disponível. É reomendável que o sistema que
gerou taisdados de identiaçãoseja representado pormodelos não-lineares
sea função de orrelação aimaestiver fora dareferida regiãode onança.
2.5 Esolha de Representação e de Estrutura
Na modelagem de sistemas não-lineares um dos passos importantes é a
esolha dos modelos que irãorepresentar osistema em estudo,uma vez que
existe umagrande diversidade de não-linearidadesdistintas. Omodelo
eso-lhidodevesersuientementerioparapoderrepresentarasnão-linearidades
mas, aomesmo tempo,simples.
Neste trabalho, foramutilizadososmodelos não-linearesauto-regressivas
omentradaexógenaonheidospelasiglaeminglêsNARX(non-linear
auto-regressive with exogenous inputs), que são estruturas paramétrias do tipo
siste-Um modelo NARX om período de amostragem normalizadoé
(Leonta-ritisand Billings,1985a,b;Billings and Chen,1989):
y(k) = F `
[y(k 1);y(k 2);:::;y(k n
y
);u(k d 1);:::
(2.6)
:::;u(k d n
u
)℄+e(k);
sendo k = 1;:::;N. F `
é uma função não-linear qualquer, y(k) e u(k) são,
respetivamente, saída e entrada dosistema, que têm seus atrasos
represen-tados por n
y e n
u
, respetivamente. d representa o tempo de retardo do
sistemaee(k)representainertezas. Ostermosy(k i),om (i=1; ;n
y )
eu(k d j), om (j =1;;n
u)
são hamados de regressores de proesso
domodelo.
Nestetrabalho,F `
seráumafunçãopolinomialomgraudenão-linearidade
`, omo denida a seguir:
y(k) = o + n X i1 i1 x i1 + n X i1 n X i2 i1 i2 x i1 (k)x i2
(k)+:::+
(2.7) + n X i 1 ::: n X i 1 =i ` 1 i 1 :::i l
x(k):::+x
i
l
(t)+e(t);
sendo
x
1
(k)=y(k 1); x
2
(k)=y(k 2); ;x
ny+1
=u(k d 1); ;
x
n
(k)=u(k d n
e
): n=n
y +n u : Os 0
s são osparâmetros quedeverão ser estimados para queaestrutura
esolhida para o modelo possa se ajustar à janela de dados utilizada na
estimação. É esperado também que o modelo não só se ajuste aos dados,
mas prinipalmentequeelepossa reproduziradinâmiaoriginaldosistema.
Apesar deserimpossíveldeniramelhorrepresentaçãoemtermosgerais,
podem-se destaar algumasvantagensdos modelos polinomiaissobre outras
representações. ÉpossívelobtermodelosNARXpolinomiaisqueajustemaos
dados de identiação om boa exatidão, ontanto que não haja uma
varia-ção muitobrusa, evitandouma taxade variaçãomuito elevada. Alémdisso
o modelo NARX polinomial pode ser transformado em uma representação
linear xando-se o ponto de operação do sistema, ou seja, obtendo-se uma
linearização domodelo. Outravantagem é afailidade de se obter
As funções não-lineares polinomiais são lineares nos parâmetros, o que
permiteautilizaçãode algoritmosdeestimaçãode parâmetrosparasistemas
lineares (Billings and Voon, 1984; Chen et al., 1989). Esses algoritmos de
estimaçãosãofáeisdeimplementar,onvergemrapidamenteejáforam
estu-dadosemum vasto númerodetrabalhos (Davisand Vinter,1985;Korenberg
etal., 1988; Chenet al.,1989; Aström and Witternmark, 1990).
2.5.1 Deteção de estrutura
O grau de não-linearidade é um dos fatores que vai denir o número de
termos andidatos, ou seja, termos possíveis nos modelos polinomiais. O
aumento no grau de não-linearidade` e dos máximos atrasos n
y e n
u ,
pro-voamum aumentosigniativononúmerode termosandidatosnomodelo
polinomial.
O número de termos rapidamentese torna demasiadamentegrande para
modelos polinomiais. Mas o problema não é tão rítio omo em outras
representações. Nas séries de Volterra, por exemplo, o número de termos
pode failmentehegar a 10 10
para sistemas relativamentesimples (Billings,
1980). Embora o número de termos andidatos do modelo polinomial seja
muito grande, em muitos asos, apenas um pequeno número desses termos
é suiente para aproximara dinâmia doproesso. É desejável a obtenção
de uma representação parimoniosa, garantindo que os termos importantes
sejamlevadosemontaedesartandosóostermosquenãoontribuampara
a dinâmia do sistema. O proedimento para a esolha dos termos a serem
inluídos no modelo é hamado de deteção de estrutura. Neste apítulo
serão apresentados os ritérios lássios para deteção de estrutura. Em
(Corrêa, 2001; Barroso, 2001)os autoresapresentam duas ténias baseadas
emonheimentos auxiliares aos dadosde identiação, sendoestas ténias
não estatístias.
2.5.2 Deteção de estrutura utilizando ERR
A taxa de redução de erro (error redution ratio) ou ERR (Billings and
Chen, 1989) assoia a ada termo andidato um índie orrespondente à
ontribuiçãodeste naexpliação davariânia dos dados de saída.
Paraverissodeformamatemátia,primeirodene-se avariâniadoerro
de modelagem (k)omo sendo:
Varf(k)g= lim
N!1 1
n "
y T
y n
X
g 2
i w
T
i w
i #
emqueg
i
indiaoselementosdovetordeparâmetrosgew
i
indiaregressores
ortogonais ey é ovetor ontendo osdados de saída. 1
Supondoquenenhum termofossearesentadoaomodelo,avariâniade
(k)seriaigualaoerroquadrátiodasaíday(k). Aadatermoaresentado,
avariâniade (k)deresede umfatoriguala 1 N (g 2 i w t i w i
),emquew
i
india
o termo inluído e g
i
o seu respetivo parâmetro. A redução no valor da
variânia pode ser normalizada om relação ao erro quadrátio médio do
sinal de saída. Assim, o ERRde ada termo édenido omosendo:
[ER R ℄= (g 2 i w T i w i ) y T y : (2.9)
O ERR pode ser utilizado na deteção de estrutura de modelos
polino-miais. Esolhe-se o número de termos desejado, através de uma ferramenta
auxiliar,oritério de Akaike, porexemplo,e onsideram-seaquelesque
pos-suíremos maioresvaloresde ERR.
2.5.3 Critério de informação de Akaike
Um proedimentopara adeterminação donúmero de termos de um
mo-delo é o ritério de informação. O método utilizado neste trabalho para
estimaro número de termos que deve ser inluído nomodelo éo ritério de
Akaike(AIC).Deaordoomestemétodo,onúmerodetermosdeummodelo
deve minimizarafunção usto J,que se apresenta da seguintemaneira:
J =Nlog(Varf(k)g)+2n
p
; (2.10)
sendo N o omprimento do registro de dados e n
p
o número de parâmetros
no modelo. Esse ritério estabelee um ompromisso entre a qualidade dos
ajustes de identiação, ontida no primeiro termo da equação e a proura
porrepresentações parimoniosas,revelada pelo segundo termo.
O número de termos determinado a partir do AIC minimiza a variânia
dosresíduosdeidentiaçãopartindodeumaestruturapreviamenteajustada
por um ritério de seleção de estrutura. Contudo, não se pode armar que
o número de termos seleionados torne o modelo apaz de reproduzir as
propriedades dinâmias do sistema original (Aguirre, 1994). O resultado
obtido através do AIC pode ser visto omo um indiativo na proura do
número ideal de termos domodelo.
1
EmAguirre(2004),oautordesreveumalgoritmobaseadonatransformaçãode
2.6 Agrupamentos de Termos e Coeientes de
Agrupamentos
O modelo NARX (2.6) denido na seção (2.5) pode ser reesrito omo:
y(k)= ` X m=0 m X p=0 n y ;n u X n 1 ;n m p;m p i=1 Y P y(k n i ) i=p+1 Y m u(k n i ); (2.11) sendo ny;nu X n1;nm ny X n ` =1 ny X nm : (2.12)
Osmonmiosdaequação(2.11)são agrupados deaordo omsua ordem
m (0 m `), sendo ` o grau de não-linearidade do modelo. Cada termo
de ordem m ontém fatores multipliativos em y(k i) e (m p) fatores
multipliativosemu(k j). Osparâmetrosdestes termos são representados
por
p;m p (n
` ;:::;n
m
),nosquais(n
` ;:::;n
m
)indiamosatrasosde adafator
onstituintedo monmioonsiderado.
O primeiro somatórioda equação (2.11) faz referênia aos monmiosda
equação(2.6),separando-osde aordoomsua ordem. Osegundo somatório
fazreferêniaaonúmerodefatoresemy(k i)notermoonsiderado. Dentro
do onjunto de termos de ordem m, um termo qualquer pode ser aessado
através do ajuste do valor de p adequado. Por m, o último somatório
permite queseja feitaadistinçãoentre ostermosde (2.6),atravésdoajuste
dos atrasos de ada um dos fatores onstituintes do termo.
Analisando-seomodeloemestadoestaionárioparaentradasonstantes,
tem-se
y(k 1) = y(k 2)==y(k n
y )
(2.13)
u(k 1) = u(k 2)==u(k n
u );
apliando (2.13) naequação (2.11),hega-sea
y(k)= ny;nu X n;n m p;m p (n ` ;:::;n
Oonjuntode termosdaformay(k i) p
u(k j) m p
édenominado
agru-pamento de termos (Aguirre and Billings, 1995). Esses serão representados
por
y p
u
m p. A onstante
n y ;n u X n ` ;nm p;m p (n ` ;:::;n
m )
éooeientedoagrupamentode termosy(k 1) p
u(k 1) m p
e será
repre-sentadopor P y p u m p
. Todosostermospertenentesaumdadoagrupamento
de termos expliamo mesmo tipode não-linearidadenomodelo.
2.6.1 Agrupamento espúrio em modelos polinomiais
Os modelos NARX polinomiais são bastantesensíveis à
sobreparametri-zação de sua estrutura (Mendes and Billings, 1998; Aguirre and Billings,
1995). Assim, um modelo que ontenha termos que não estejam dentro dos
agrupamentos efetivos pode apresentar regimes dinâmiosespúrios, ou seja,
regimesdinâmiosque não sejamexibidos pelosistema real.
A importâniade um agrupamento de termos pode ser quantiada
pe-losseus oeientes (Aguirre, 1995). Agrupamentosde termos quepossuem
oeientes nulos podem indiar que aqueles agrupamentos não ontribuem
em nada para o modelo. Ou, se o oeiente de algum agrupamento tiver
o seu valor muito menor quedos agrupamentos efetivos, esse provavelmente
pode ser desartado. Osagrupamentosnão efetivos ouapresentam variação
de sinal dos seus oeientes em relação ao número de termos inluídos no
modelo ou sua amplitude é insigniante omparada a outros
agrupamen-tos. Embora essas análisessejamrelevantes, nem sempreseus resultadossão
determinantes parasedesartarum agrupamentode termos. Omodelo
poli-nomial,identiadoapartirdaanálisedos agrupamentosde termosefetivos,
tem melhores hanesde reproduzir asdinâmiasdos sistemasque sedeseja
estudar.
2.7 Pontos Fixos em Sistemas Autnomos
Pontos xos deum sistemadisretoautnomo são ospontosde operação
queapresentam aseguintearaterístia:
y(k)=y(k+i); 8i 2Z +
: (2.15)
Sistemasdinâmioslinearesapresentamapenasumpontoxotrivial. Em
não-úbia emy (variável de saída), esse deve apresentar 3 pontos de equilíbrio,
ouseja, três pontos de operação nasaída do sistema.
OspontosxospodemserobtidosapartirdemodelosNARXpolinomiais
atravésdooneito deagrupamentosde termoseoeientes de
agrupamen-tos(Aguirre, 1996) resolvendo aseguinteequação polinomial:
y ` y(k) ` ++ y 2 y(k) 2 +( y
1)y(k)+
0
=0; (2.16)
sendoque
0
éotermoonstantedomodelo. Omodeloapresentará `pontos
de operação nasaída se o termo
y
` 6=0. Os pontos xos domodelo são os
valores que zerama equação (2.16).
2.7.1 Pontos xos em sistemas não autnomos
Um modeloNARX não autnomo analisadoemestadoestaionário para
entrada onstantepode ser esritoomo segue:
y(k)= ny;nu X n1;n m` p;m` p (n `
; ;n
m` ) ` X m`=0 m` X p=0 y(k) p u(k) m` p ; (2.17)
sendoquem`orrespondeaograudenãolinearidadedeadatermoeestána
faixa 1m``. Cada termo de grau m` pode onter um fator dos termos
y(k) de ordem p, um fator em u(k) de ordem (m` p) e um oeiente
p;m` p (n
`
; ;n
m` ).
Para melhorompreensão, aequação (2.17) pode ser reesrita omo:
y `y ` + P ` m`=` 1 [ u
m` (` 1)
y ` 1
u
m` (` 1)
℄y ` 1 + + P ` m`=p [ u m` p y pu m` p ℄y p + + P ` m`=1 [ u m` 1 y u m` 1 1℄y + + P ` m`=1 u m`u m` + 0 =0: (2.18)
Pode-se notar que asloalizaçõesdos pontosxos dependem dos valores
de entrada (onstante) do sistema, ou seja, essas variam om o patamardo
sinaldeexitação. Essasequaçõespassamaterafunção deummapeamento
que leva u a um valor determinado para y. Os valores gerados por estes
mapeamentosaraterizamuma urva estátiapara osistema. Então, dessa
forma, a função estátia de sistemas não autnomos pode ser estimada a
partir de modelos dinâmios. Nesse aso os oneitos de agrupamentos de
quandoemestadopermanente, emoutraspalavras,desreve aaraterístia
estátiado sistema.
Osoeientes de agrupamentospodemser esritosemfunção dos
parâ-metrosdo modelo daseguinte forma:
S =
x
; (2.19)
sendo que a matriz S mapeia para
x
. é o vetor dos parâmetros do
modelo NARX polinomiale
x
é ovetor dos oeientes dos agrupamentos
de termos domodelo.
Ainda, pode-se esrever a função estátia y = f(u;y) (2.17), de forma
matriialdaseguintemaneira:
y=[y
0 u 0 y 1 u 0 y p u m p ℄(S): (2.20)
Chamandoa matriz [y 0 u 0 y 1 u 0 y p u m p
℄ de E, tem-se que
y=E(S): (2.21)
Aapresentaçãomatriialapresentadaatravésdaequação(2.21)serámuito
importanteparaodesenvolvimentodotrabalho,prinipalmentepara a
ons-truçãometodológiado trabalho.
2.8 O Ganho Estátio
Nesta seçãoseráutilizadoooneitode agrupamentode termosede
oe-ientede agrupamentoparadeterminarumaequaçãoparaoganhoestátio.
Esta aproximaçãoé equivalenteà utilizaçãodoteoremadovalornalpara a
resposta ao degrauom amplitude nal u. Conformevisto na seção (2.7.1),
omodelo NARX polinomialpode ser esrito daseguinteforma:
y= 0 + y y+ u u+ l 1 X m=1 ` m X p=1 y p u m y p u m + ` X p=2 y p y p + ` X m=2 u m u m ; (2.22)
sendo que os termos de proesso e seus respetivos parâmetros foram
agru-pados daseguinte forma:
termo onstante :
0
termos lineares emy :
y y
termosruzados : P ` 1 m=1 P ` m p=1 y p u m y p u m
termosnão-lineares emy : P ` i=1 y iy i
termosnão-lineares emu : P l i=1 u i u i .
Dessa maneirao ganho estátiopode ser alulado por:
^
K(y;u)= y u = 0 u + u + P ` m=2 u m u m 1 1 y P ` 1 m=1 P ` m p=1 y p u m y (p 1) u m P ` p=2 y p y (p 1) : (2.23)
2.9 Estimação de Parâmetros
Uma vez esolhida aestrutura de um modelo, deve-se estimar seus
parâ-metrosparaqueomodelopossaseaproximardoomportamentodinâmiodo
sistemaoriginal. Issoénormalmentefeitoemmodelospolinomiais
apliando-seténias de mínimos quadrados (MQ) aos dadosde identiação.
Considere uma estrutura polinomialomo:
y(k)= n X i=l p i (k) i
+e(k); (2.24)
os regressores do modelo, p
i
(k), orrespondem aos diferentes termos no
po-linmioe os 0
i
s são os respetivosparâmetros.
Esrevendo a equação (2.24)na formade erro de predição, tem-se:
y(k)= n X i=l p i ^ i +(k; ^ ); (2.25) sendo n X i=l p i ^ i
=y(k;^ ^
); (2.26)
sendoqueosímbolo(^)sobreasvariáveisfazreferêniaavalores estimados.
Oresíduo de identiação(k; ^
) édenido omo:
O vetor de resíduos f(k), k = 1; ;Ng representa os erros de
mode-lagem, ruído do sistema e/ou qualquer inerteza. A equação (2.26) é
deno-minada preditor de um passo à frente e y(k;^ ^
) é a predição de um passo à
frentede y(k).
Os parâmetros são estimados de modo a minimizar um índie de
de-sempenho estabeleido previamente. Considere a função usto (Aström and
Witternmark, 1990): J N ()= 1 N N X k=1 f(); (2.28)
sendo f() uma função matemátiagenéria.
Os parâmetros estimados serão diferentes para ada f() onsiderado.
Utilizando-se f = 2
, tem-se o hamado método de mínimos quadrados.
Nesse aso o índie de desempenho (ou função usto) passa a ser:
J N ()= 1 N N X k=1 (k;) 2 ; (2.29)
que deverá ser minimizado para determinar o onjunto de parâmetros
or-respondente.
Representando aequação (2.25) emnotação matriial:
y= ^ + ~ ; (2.30) sendo
y = [y(1) y(2) y(N)℄ T
~
= [(1) (2) (N)℄ T ; (2.31) = 2 6 6 6 4 p 1 (1) p 2
(1) p
n (1) p 1 (2) p 2
(2) p
n (2) . . . . . . . . . . . . p 1
(N) p
2
(N) p
n (N) 3 7 7 7 5 ; (2.32) = [ 1 2 n ℄ T : (2.33)
2.9.1 Propriedades Estatístias do Estimador de
Míni-mos Quadrados
Partindo da propriedade de onvexidade da função usto (2.29), sua
so-lução ótima,pode ser obtidada seguinte forma:
J
N ()
=0: (2.34)
Resolvendo o lado direitoda equação(2.34) tem-se:
T T
y=0: (2.35)
Ovetor de parâmetros quesatisfaz a relação(2.35) é
^ MQ =( T ) 1 T y; (2.36)
que tem soluçãoúnia, se esomentese, T
fornão-singular.
Édesejadoqueasolução(2.36)sejanãopolarizada,ouseja,Ef ^
MQ g=,
sendoovetordeparâmetrosreais dosistemaeEfgooperadoresperança
matemátia.
Observa-se que Ef ^
MQ
g = Ef( T
) 1 T
yg. Se y for esrito omo
y= +e, pode-se reesrever aequação anterior omo:
E f ^
MQ
g=Ef( T
) 1 T
( +e)g: (2.37)
Pelapropriedadeassoiativadooperadoresperançamatemátia Efg,
pode-sereesrever aequação (2.37) omo:
Ef ^
MQ
g=Ef( T
) 1 T
g+Ef( T
) 1
eg: (2.38)
Para que E f ^
MQ
g= seja respeitado, observa-se daequação (2.38) que
Ef( T
) 1
eg =0. Se o erro e for ruído brano, o vetor ^
estimado por
MQ representa a melhor estimativa não-polarizada de sendo y^ T
e =0, ou
seja, taisvetores são ortogonais.
Para ompreender apropriedade de ortogonalidade dos MQ éneessário
onsiderar primeiramenteas seguintes relações: y^ = ^
e =(y y )^ ^e. 2
Com isso, tem-se que:
^ y T = ^ T T (y ^ ) = y T ( [ T ℄ 1 T
y [
T ℄ 1 T y) = y T ( [ T ℄ 1 T [ T ℄ 1 T )y = 0: 2
mo-Como dois vetores ujo produto interno é zero são ortogonais, diz-se que o
vetor de saídaestimadoeovetorde resíduosdomodelo sãotambém
ortogo-nais. Existemmétodosdeestimaçãodeparâmetrosquegarantemaobtenção
de estimativasnão-polarizadasmesmo quando o vetor de resíduose o vetor
de saída domodelosejam não ortogonais (Aguirre,2004).
2.9.2 Mínimos quadrados estendidos
Como dito na seção anterior, a polarização no estimador MQ surge do
fatodeexistirorrelaçãonovetorderesíduoseexistiremregressoresdaforma
y(k i)nomodelo. Esse fatolevaàorrelação damatrizde regressoresom
e(k). Se no modelo só existirem regressores da entrada (termos do tipo
u(k i)), o fatode não haver orrelação emk 6=0não induz polarizaçãono
estimador.
Se os resíduos de identiação forem modelados omo um proesso de
médiamóvel,da seguinte maneira,
e(k)=
i
(k i)+(k); (2.39)
sendo(k)ruídobrano,ostermos(k i)podemser inorporadosàmatriz
de regressores e os seus respetivos parâmetros ao vetor de parâmetros do
modelo daseguinte forma:
y = +e ; (2.40)
sendo quey
=y,e
=[(k)(k+N 1)℄ T , = 2 6 6 6 6 6 6 6 4 . .
. (k 1)
.
.
. (k)
.
.
. (k+1)
. . . . . . . .
. (k+N 2) 3 7 7 7 7 7 7 7 5 (2.41) e =[ . . . i ℄ T
. Aparteparametrizadapor
i
daequação (2.39)foi
inorpo-rada à matriz de regressores. Por este motivo,pode-se notar que e
éruído
brano, de forma que em (2.40) o termo e
é não-orrelaionado om
.
Logo a estimativapor (MQ)
Um uidado deve ser tomado om os termos de ruído no modelo: de
maneira prátia, o ruído é modelado apenas om o intuito de se evitar a
polarizaçãodomodeloNARXpolinomial. Omodelonaldeveonterapenas
termos de proesso e aparte estoástia deveser desprezada.
Modelos om termos de ruído estimados por MQE reebem o nome de
modelosNARMAX,dasiglaeminglês(nonlinearautoregressive withmoving
average and exogenous input).
Evidentemente, (2.42) não pode ser alulado omo mostrado, pois
inlui regressores do tipo (k i), que não são medidos. A m de resolver
este problema, taisregressores preisamser estimados. Quando issoé feito,
o resultado é um proesso iterativo que é equivalente a resolver (2.42). Em
Aguirre (2004) oautor desreve um algoritmoiterativopara a estimação de
(k) daseguinteforma:
1. apartirdaequaçãode regressãoy(k)= T
(k 1)+e(k)edos dados
disponíveis, monte a equação matriialy = +e, omo no método
de mínimos quadrados, e determine ^ MQ =[ T ℄ 1 T y;
2. aluleo vetor de resíduos
i =y ^ MQ ;
3. façai=2 (iindia o númerode iterações);
4. om
i 1
,monteamatrizestendidaderegressores,
i
,eestime ^ MQE = ( i T i ) 1 i T y;
5. determine ovetor de resíduos
i =y i ^ MQE i ;
6. façai=i+1e volte aopasso 4. Repita até onvergir.
Para veriar a onvergênia, pode-se veriar a variânia dos resíduos
oudos parâmetrosestimados em ada iteração.
Lembrando-se que, para a simulação do modelo, deve-se desprezar os
termos de ruído domodelo.
2.9.3 Regularização
Quando a estrutura do modelo não é adequada para representar o
sis-tema ou o onjunto disponível de dados não é suientemente informativo,
o problema de identiação de parâmetro pode ser mal-ondiionado. Se
métodos de minimizaçãode erro de predição foremusados para a estimação
dos parâmetros,os resultados nãoserão apropriados,poispodemapresentar
pro-prediçãonãoérobustoemtaisasos. Existempelomenosduasaproximações
gerais para soluionar oproblema:
o desenvolvimento de uma estrutura alternativa para o modelo om
menos graus de liberdade e assim obter uma parameterização mais
adequadaaos dados;
regularizar o algoritmo de identiação introduzindo restrições e/ou
penalidades para atrair os graus exessivos de liberdade para valores
razoáveis(Tikhonov and Arsenin, 1977;Johansen, 1996, 1997).
Noque dizrespeito ao primeiroitem aima,neste trabalhoserá onsiderado
queoproblemadaestruturajáestáresolvidoenãoseráalvodedisussões. O
problemadesobre-parametrizaçãojáfoidisutidoemmuitostrabalhos,omo
referêniapode-seitar(BillingsandVoon,1983;Aguirre,1994;Aguirreand
Billings, 1995; Mao and Billings, 1997; Mendes and Billings, 1998; Piroddi
and Spinelli,2003).
No que diz respeito ao segundo ítem, o problema pode ser esrito omo
(Hastie etal.,2001):
min
f2H "
N
X
i=1 L(y
i ;f(x
i
))+J(f) #
(2.43)
sendo que L(y
i ;f(x
i
)) é uma função usto, J(f) é uma penalidade imposta
àL() eH é o espaçoem queJ(f)é denido.
Demaneirageral,aesolhadeJ(f)eadeterminaçãoótimadoparâmetro
deregularizaçãosãoosprinipaisalvosde estudosemregularização. Entre
osmétodosde regularizaçãopode-se destaar osmétodos de GaussNewton,
Tikhonov, Fourier, Lagrangiana e Bayesiana. Como referênia pode-se
i-tar os reentes trabalhos a seguir: (Li and Yang, 2000; Roths et al., 2001;
Sugiyama and Ogawa, 2002; Hagiwara, 2002; kumar et al.,2004; Merbouha
and Mkhadri, 2004; Pan and Li, 2004; Hilgers and Bertram, 2004; Fu etal.,
2005a,b;BoyadjievandDimitrova,2005;Chen,2006). Essesartigos
apresen-tam novos resultados e uma revisão bibliográae teória abrangentesobre
regularização. Apenasparadeixarlaro,oestudodaregularizaçãonãoéalvo
de estudos deste trabalho, no entanto, será útilpara algumas disussões no
apítulo5.
2.10 Validação do Modelo
polari-domodelo. Por essa razão,faz-se neessária a utilizaçãode um ritério para
determinar seo modelo responde àsaraterístias quelhe são exigidas. No
ontexto deste trabalho, são onsideradosdois ritérios:
1. predição innitospassos à frente (simulaçãolivre);
2. apaidade de representar o omportamentoestátiodosistema.
Outramaneirade veriaravalidadedinâmiadomodeloéousode funções
de orrelação. Essas funções podem ser apliadas aos resíduos para a
veri-ação de orrelação linear e não-linear. Se os resíduos possuírem alguma
orrelação, o modelo será onsiderado polarizado, uma vez que existem
evi-dêniasde dinâmiasnãomodeladasontidasnosresíduos. Outrostestessão
as orrelaçõesruzadas, lineares e não-lineares, entre os resíduos e os dados
de entrada e saída dosistema (Box and Jenkins, 1976; Ljung,1987; Billings
and Voon, 1983, 1986).
2.11 Comentários Finais
Esse apítulotemomo prinipalobjetivofamiliarizaroleitorom
téni-as gerais emidentiaçãode sistemasnão-lineares.
Essas ténias são a base de todo um onjunto de novas ténias que
foram e estão sendo desenvolvidas para tornarem osmodelos ada vez mais
Identiação Multi-objetivo
Este apítulo tem omo objetivo denir o Problema Multiobjetivo, suas
etapas,esuasimpliaçõesnaidentiaçãode sistemas,atravésdeum revisão
teóriabásiaeatravésde um estudodoestadodaarte. Seráfeitauma
revi-são bibliográa a respeito de identiação aixa-inza envolvendo ténias
mono-objetivoe multiobjetivo.
3.1 O Problema Multiobjetivo
Se em um problema de otimização qualquer estiverem disponíveis mais
de um objetivo que sedeseja alançar, haverá, de formageral, dois tiposde
solução:
1. Haverá soluções que, sob todos os objetivos simultaneamente
onside-rados, serão suplantadas poroutras soluções;
2. Haverá soluções que,omparadas om outras soluções, serão melhores
emalgumoualgunsobjetivos,maspioresemoutroououtrosobjetivos.
No segundo aso, as soluções são denominadasSoluções eientesou
so-luções Pareto-ótimas. A determinação desse onjunto é uma das prinipais
etapasdoProblemaMultiobjetivo. Aprinípionão existeumasoluçãoúnia
que simultaneamente minimize todas as diferentes funções-objetivo. Esse
tipo de problema tende a possuir um onjunto limitado om innitas
solu-ções. No entanto, de alguma forma, deve-se esolher um únia solução. O
onjunto Pareto-Ótimo é onstituído de soluções andidatas a se tornarem
essa solução únia.
A esolha de uma solução únia éuma etapaimportante, naqual o
on-juntodesoluções-andidatasdeveserreduzidoatéadeterminaçãodessa
de busa da melhor solução, supondo a existênia de uma função utilidade,
queexibeum padrão de preferênias oerente eordenado.
OProblemamultiobjetivopode então ser formuladoomouma
ombina-ção dessas etapasde obtenção doPareto-ótimo edaesolha dasoluçãonal
(ou etapa de deisão) através daapliaçãodafunção utilidade.
3.2 Formulação do Problema Multiobjetivo
Nasduasseçõesseguintesapresenta-seaformulaçãodasetapasenvolvidas
noProblemade OtimizaçãoMultiobjetivo.
3.2.1 Determinação das Soluções Eientes
Considere o vetor de funções-objetivo:
J()= 2 6 6 6 4 J 1 ( ^ ) J 2 ( ^ ) . . . J m ( ^ ) 3 7 7 7 5 T ; (3.1)
De maneira geral, não existe uma solução únia que minimize
simultanea-menteasmfunções-objetivo. Comisso, um grandenúmerodesoluçõespode
ser enontrado, araterizando assim o onjunto Pareto-ótimo (Chankong
and Haimes, 1983):
^ 2 ^ ,f ^ : J( ^
)J( ^
) eJ( ^
)6=J( ^ )g; (3.2) em que ^
é o onjunto de parâmetros estimados e ^
é o espaço de
parâ-metros. As relaçõesde omparação entre os vetores são denidas omo:
x z , x
i z
i
;8i21;:::;n
x 6=z , 9 i21;:::;n j x
i 6=z
i ;
(3.3)
sendo que x
i e z
i
são omponentes dos vetores x;z 2 R n
. A solução será
eiente se e somente se não existir uma outra solução que melhore um
dos objetivos sem a degradação de pelo menos outro objetivo. Em outras
3.2.2 Etapa de Deisão
Nessa etapaproura-seumaúniasoluçãoquesatisfaçauma função
utili-dade quedeve ser denida partindode uma sistemátia de apresentação das
alternativasque garanta que:
1. Onúmerodeonsultasaodeisor(humanoouautomátio)seráomenor
possível;
2. Apresentação de um número de alternativasao deisorseja inteligível;
3. A melhor soluçãonão será perdida. O enadeamentodessas etapas de
deisãoonduz a diferentes estruturas para omeanismo de deisão.
Emumaso,em queháintervençãode umdeisorhumano,basiamente,
pode-seseguir uma das seguintes possibilidades:
Apresentação de preferênias aposteriori.
Neste aso, será determinado um onjunto de soluções que seja
re-presentativo de todo o onjunto de soluções eientes antes de iniiar
qualquer interaçãoom odeisorhumano. Aestrutura das onsultas é
formuladapartindodapremissadequeaspossíveissoluçõesjátiveram
suas funções objetivopreviamente avaliadas;
Apresentação de preferênias progressivas.
Agora,aonsultaaodeisoréfeitaonomitantementeom oproesso
de determinação de soluções eientes. Cada onsulta ao deisor é
utilizada para determinar os parâmetros de uma nova busa de um
ponto pertenente ao onjunto de soluçõeseientes;
Apresentação de preferênias apriori.
Neste esquema, o deisor é previamente onsultado, e formula uma
erta estrutura de preferênias que não depende do onheimento das
alternativasonretasquevieremaseoloar. Estasituaçãonão
ara-terizapropriamenteumproblemamultiobjetivo,podendoserentendida
omo um aso de otimização mono-objetivo. No entanto, esta é uma
formade agregar múltiplos objetivosem um problema de otimização.
No aso deste trabalho, pretende-se desenvolver um deisor automátio,
sem intervenção de um deisorhumano. Assim, pretende-se queesse deisor
automátioseja apazde esolher omelhormodelo (épreisodeniro queé
3.3 Estado da Arte
Devidoaofatodequemuitossistemasapresentamalgumtipode
ompor-tamento não-linear, faz-se neessário o desenvolvimento de ténias
identi-açãode sistemas,proessamento de sinais, ténias de ontrole e análisede
sistemas que sejamapliáveis a essas situações(Billings, 1980). Estudos
in-luemredesneuraisapliadosaestesproblemas(Bragaetal.,2000). Embora
redes neurais tenham exelentes propriedades, a obtenção de informação a
partir de sua estrutura é difíil, devido à sua omplexidade (Corrêa, 2001).
Isso pode não ser relevante em apliações omo predição de séries
tempo-raise reonheimento de padrões, mas é uma onsiderável desvantagem em
engenharia e apliações ientías, em que é importante entender, analisar
e simular os meanismos que produzem a relação entre ausa e efeito das
entradas esaídas do sistema(Eykho, 1981).
Os modelos NARMAX polinomiais eraionais (Leontaritis and Billings,
1985a,b;Chen etal., 1989) são uma alternativa às representações porredes
neurais. Empartiular,modelosNARMAXpolinomiaispermitemfailmente
a obtenção de informaçõesanalítias sobre a dinâmiado sistema (Jáome,
1996).
Nas últimas duas déadas houve um grande volume de trabalhos a
res-peito de identiação não-linear (Aguirre, 2004). Apesar de grandes
on-quistas,aidentiaçãonão-linearainda possuigrandesdiuldades. Umdos
grandes desaos é a esolha de uma estrutura adequada e ompata para o
modelo (Chen et al., 1989; Lindskog, 1996; Aguirre, 2004). Várias
aborda-gens foram elaboradas para ataar esse problema (Aguirre, 1994; Mao and
Billings,1997; Corrêa, 2001). Para o aso espeío de modelos NARMAX
polinomiais,um importantetrabalho é o estudo de agrupamento de termos
(Aguirre and Billings, 1995). No iníio da déada de noventa, alguns
tra-balhos omeçarama utilizar informaçõesauxiliares (não ontidas nos dados
dinâmios de identiação) (Bohlin, 1991; Tulleken, 1993; Eskinat et al.,
1993). Aguirreetal.(2000)sugerequeouso deinformaçãoauxiliarpodeser
usado naesolha daestrutura do modelo.
Com isso, alguns autores sugerem lassiar os métodos de modelagem,
em função da utilização de informação auxiliar da seguinte forma (Herbert
and Tulleken, 1993; Sjöberg etal.,1995; Bohlin and Graebe, 1995):
Modelagem aixa-brana: onsiste emproedimentosem quea
es-truturadomodelo sejatotalmenteonheida, geralmentedeterminada
pelasequaçõesfísiasouquímiasqueregemoomportamentoestátio
sistema. Os parâmetrosdo modelo, geralmente, não possuem nenhum
signiadofísio. Oproessode modelagem,hamadode identiação,
sebaseia úniae exlusivamenteemdados de entrada e saídamedidos
do sistema. A estrutura do modelo pertene a famílias de modelos
que apresentam exibilidadee um histório de suesso (Sjöberg etal.,
1995);
Modelagemaixa-inza: éaonstruçãode modelosqueinorporam
onheimento a priori do sistema, om um erto grau de inerteza na
seleção de estrutura da representação (Jorgensen and Hangos, 1995).
Sjöberg e outros 1995 subdividem a modelagem aixa-inza em dois
subgrupos:
a) Modelagem físia: toda a estrutura é determinada por
onhei-mentos físios do sistema, e apenas os parâmetros, ou um erto
númerodesses são estimados apartir dos dados;
b) Modelagem semi-físia: informações do sistema são usadas para
sugerir ombinações não-lineares entre os sinais medidos,
utili-zando tais informações da estrutura do modelo (Lindskog and
Ljung, 1995b).
3.3.1 Comparação Entre os Tipos de Modelagem
Nessa seção é apresentada uma breve omparação entre os três tipos de
modelagemapresentados na seção 3.3. As vantagens edesvantagens da
mo-delagemaixa-preta, aixa-brana e aixa-inzasão ressaltadas.
A vantagem da modelagem aixa-brana é o fato de que os parâmetros
domodelopossuamsigniadofísioesão determinadosapartirde
onhei-mentosapriori dosistema(Corrêa, 2001)ouportestesemestado
estaioná-rio. Aguirre (2004) utiliza essa ténia para estimara resistênia hidráulia
de um sistema real de bombeamento de água. Em (Pottmann and
Pear-son, 1998) são apresentadas duas desvantagens da abordagemaixa-brana.
A primeira refere-se à maior omplexidade que em geral se tem na
estru-turadas equações, normalmenteenvolvendo equaçõesdifereniaisalgébrias,
equações difereniais pariais e/ou integrais. A segunda é que os modelos
são geralmente onstituídos por equações ontínuas no tempo, enquanto os
proessos de mediçãoe ontrole são em geraldisretos.
Jáamodelagemaixa-pretapossuiaexibilidadedaesolhadeestrutura,
failitando a formulação e a resolução de problemas de ontrole (Pottmann