C
ENTRO DET
ECNOLOGIAP
ROGRAMA DEP
ÓS-G
RADUAÇÃO EME
NGENHARIAE
LÉTRICAVIABILIDADE DA UTILIZAÇÃO DE MÁQUINAS DE
INDUÇÃO CONVENCIONAIS COMO MOTORES SEM
MANCAIS MECÂNICOS
VALCÍ FERREIRA VICTOR
ii
P
ROGRAMA DEP
ÓS-G
RADUAÇÃO EME
NGENHARIAE
LÉTRICAVIABILIDADE DA UTILIZAÇÃO DE MÁQUINAS DE
INDUÇÃO CONVENCIONAIS COMO MOTORES SEM
MANCAIS MECÂNICOS
VALCÍ FERREIRA VICTOR
Orientador: Prof. Dr. Sc. Andrés Ortiz Salazar – UFRN – CT – DCA.
Natal, RN – Brasil Novembro / 2012
Tese de Doutorado submetida ao corpo docente da Coordenação do Programa de Pós-Graduação em
Engenharia Elétrica da UFRN como parte integrante
dos requisitos para obtenção do título de Doutor em
Seção de Informação e Referência
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede
Victor, Valcí Ferreira
Viabilidade da utilização de máquinas de indução convencionais como motores sem mancais mecânicos / Valcí Ferreira Victor. – Natal, RN, 2012.
141 f. : il.
Orientador: Andrés Ortiz Salazar.
Tese (doutorado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. DSP – Tese. 2. Elementos Finitos – Tese. 3. Enrolamento Dividido – Tese. 4. Motor de Indução Convencional – Tese. 5. Motor-mancal. 6. Rotor Gaiola de Esquilo. I. Salazar, Andrés Ortiz. II. Universidade Federal do Rio Grande do Norte. III. Título.
iv
À minha Ida, aos meus, Rafael e
v À Deus pela vida;
Ao Professor Andrés Ortiz Salazar, pessoa de valor inestimável;
Ao colega João Coelho de Sousa Filho, amigo da eletrônica;
Aos colegas Luciano e Soares pela companhia ao caminhar nos passos do Coelho, trabalho de
muitas mãos;
Ao colega José Álvaro pelas colaborações durante esses cinco anos;
Aos colegas Álvaro e Gabriel pelas colaborações com o DSP;
À Professora Ana Catarina, pela colaboração na elegância do texto deste trabalho;
À Professora Sylmara Barreira, pela colaboração com o idioma inglês;
À minha Gê, meu Rafael, minha Karine, por me amarem tanto;
À minha mãe, meu abrigo enquanto distante da minha família;
Ao IFTO, pelos incentivos aos servidores nas diversas áreas de pesquisas;
Ao CNPq, CAPES, e PPgEE pelo apoio Financeiro;
vi
L
ista de Figuras e Tabelas
x
L
ista de Símbolos
xiv
R
esumo
xviii
Abstract
xix
Capítulo 1 – Motores sem Mancais Mecânicos
1
1.1. Introdução 1
1.2. Motores sem Mancais Mecânicos 2
1.3. Motores-mancais de Indução 5
1.4. Justificativas e Objetivos 6
1.5. Sumário 7
Capítulo 2 – Forças Radiais nos Motores-Mancais de Indução
8
2.1. Introdução 8
2.2. Geração de Forças em Motores de Indução 9
2.3. Motor-Mancal Radial de Indução Tipo Duplo Enrolamento 12
2.4. Motor-Mancal Radial de Indução Tipo Enrolamento Dividido 13
2.5. Motores-Mancais Radiais de Indução – Tipos de Rotores 15
2.6. Simulação de Forças Radiais para Motor-Mancal Radial de Indução 19
2.7. Conclusões 20
Capítulo 3 – Modelo do Motor-mancal de Indução do Tipo
vii
3.2.1. Correntes do Rotor e Estator 22
3.2.2. Equações de Torque 23
3.2.3. Equações das Correntes de Magnetização 23
3.3. Modelo da Posição Radial 25
3.3.1. Modelo da posição para uma direção 25
3.3.2. Modelo da posição para três direções 28
3.4. Simulação de Forças Radiais para o Modelo 35
3.5. Conclusões 38
Capítulo 4 – Características do Motor de Indução para Aplicação
Motor-Mancal
39
4.1. Introdução 39
4.2. Tipos de Motores de Indução 40
4.3. Tipos de Alimentação 40
4.4. Tipos de Rotores 46
4.5. Modos de Operação 47
4.5.1. Motor monofásico 47
4.5.2. Motores trifásicos 50
4.5.2.1. Número e formação de polos no estator 50
4.5.2.2. Ligação do enrolamento dos motores de indução 52
4.6. Conclusões 57
viii
5.3. Inversores de Frequência 66
5.4. Interface DSP/IGBT’s 67
5.5. Conversor CC – CA 68
5.6. Interface / Sensores de Corrente 68
5.7. Interface / Sensores de Posição 70
5.8. Descrição do Módulo eZdspTMF281® 73
5.8.1. Etapas para realização do controle de posição 75
5.8.2. Etapas para realização do controle de posição 75
5.8.3. Descrição do sistema de controle 75
5.8.4. Considerações sobre os controladores do sistema 76
5.8.4.1. Controlador de posição 76
5.8.4.2. Controlador de corrente 79
5.8.4.3. Operação dos controladores em cascata 80
5.9. Conclusões 82
Capítulo 6 – Resultados Experimentais
84
6.1. Introdução 84
6.2. Controladores de Correntes 84
6.3. Controlador de Posição Radial 86
6.3.1. Resultados da operação do motor-mancal 88
6.3.1.1. Operação motor-mancal – 60 Hz 89
6.3.1.2. Operação motor-mancal – 75 Hz 92
6.3.1.3. Operação motor-mancal – 30 Hz 94
ix
Capítulo 7 – Conclusões Finais e Perspectivas Futuras
98
7.1. Conclusões Finais 98
7.2. Perspectivas de Trabalhos Futuros 99
Apêndice A. Determinação dos Parâmetros do Motor de Indução
100
Apêndice B. Diagrama de Circuitos das Interfaces
106B.1. Circuitos das Interfaces de Corrente 106
B.2. Circuitos das Interfaces de Posição 106
B.3. Circuitos das Interfaces DSP/IGBT 106
Apêndice C. Listagem do Programa de Controle
107Apêndice D. Referências dos Trabalhos Publicados
119x
Figura
Página
1.1 Diagrama esquemático do mancal magnético 3
1.2 Máquina com mancais magnéticos 3
1.3 Motor-mancal 4
2.1 Graus de liberdade do rotor 8
2.2 Estrutura para suspensão magnética: (a) com dois graus de liberdade; (b) com
cinco graus de liberdade 8
2.3 Forças de Maxwell e de Lorentz em um motor-mancal 10
2.4 Forças de Maxwell para corrente com frequência 60 Hz 11
2.5 Representação esquemática do fluxo magnético para um par de bobinas no
estator, máquina de quatro pólos 11
2.6 Motor-mancal do tipo duplo enrolamento – geração de força radial: (a) sentido
positivo do eixo x; (b) sentido negativo do eixo x 13
2.7 Motor-mancal do tipo enrolamento dividido – geração de força radial: (a) sentido positivo do eixo x; (b) sentido negativo do eixo x 14
2.8 Rotores de motores-mancais: (a) Rotor gaiola de esquilo; (b) Rotor 4-polos 15
2.9 Curvas torque x velocidade motor-mancal 3.7 HP, 4-polos, 1715 RPM, com
rotor gaiola de esquilo e rotor com estrutura 4-polos 16
2.10 Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor 4-polos, i4-polos
induzidas 17
2.11 Sentido das correntes: (a) Estator – campo i2-polos; (b) Rotor 4-polos, i2-polos
induzidas 17
2.12 Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo,
i4-polos induzidas 18
2.13 Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo,
i2-polos induzidas 18
2.14 Força de Maxwell para motor com rotor gaiola e rotor 4-polos, delta i = 80% 19
3.1 Esquema de distribuição das bobinas do estator 21
3.2 Diagrama de blocos do motor-mancal de indução tipo enrolamento dividido 24
3.3 Representação esquemática do fluxo magnético por um par de bobinas no
estator de uma máquina de quatro polos 25
3.4 Corte transversal do motor-mancal com rotor descentralizado 28
3.5 Detalhe do ângulo no deslocamento do rotor 29
xi
3.9 Distribuição do enrolamento do motor-mancal de indução enrolamento
dividido 36
3.10 Simulação do motor pelo FEM, ia1 = 5,74 e ia2 = 0.29 A: (a) Comportamento
do fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor 36
3.11 Simulação do motor pelo FEM, ia1 = 2,87 e ia2 = 2,87 A: (a) Comportamento
do fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor 37
3.12 Simulação do motor pelo FEM, ia1 = 0,29 e ia2 = 5,74 A: (a) Comportamento do
fluxo magnético; (b) Vetores de densidade de fluxo magnético no rotor 37 3.13 Forças radiais, no rotor, devido à variação de corrente nas bobinas a1 e a2 38
4.1 Tipos de motores de indução 40
4.2 Ligação em estrela: (a) motor de indução trifásico; (b) motor-mancal de
indução trifásico 44
4.3 Motor-mancal monofásico 45
4.4 Força radial no motor monofásico, f = 60 Hz 45
4.5 Esquema de um motor monofásico 48
4.6 Esquema de ligação dos grupos do motor monofásico para geração de forças
radiais e torque: (a) operação um grupo; (b) operação com dois grupos 49
4.7 Diagrama de ligações dos grupos do motor monofásico 49
4.8 Distribuição dos grupos: (a) polos ativos; (b) polos ativos e conseqüentes 51
4.9 Geração de forças radiais: (a) polos-consequentes; (b) polos ativos por fase; (c)
polos ativos de fase 51
4.10 Diagrama de ligações dos motores trifásicos 6 terminais: (a) 220 V; (b) 380 V 53
4.11 Diagrama de ligações dos motores trifásicos 9 terminais: (a) 220 V; (b) 440 V 53
4.12 Diagrama de ligações dos motores trifásicos 9 terminais: (a) 380 V; (b) 760 V 54
4.13 Diagrama de ligações dos motores trifásicos 12 terminais: (a) 220 V; (b) 380 V 54 4.14 Diagrama de ligações dos motores trifásicos 12 terminais: (a) 440 V; (b) 760 V 55
4.15 Diagramas de ligação dos motores de indução trifásicos Dahlander 56
5.1 Diagrama de blocos do sistema motor-mancal de indução 60
5.2 Sistema mecatrônico motor-mancal de indução 61
5.3 Motor-mancal de indução 62
5.4 Motor-mancal de indução trifásico: (a) distribuição do enrolamento no estator; (b) divisão do enrolamento para alimentação pelos inversores 63
5.5 Estrutura simplificada: (a) motor de indução; (b) motor-mancal radial; (c)
xii
5.8 Diagramas dos inversores de potência do motor-mancal 67
5.9 Interface DSP/IGBT’s 67
5.10 Sinais PWM monitorados em uma das saídas da interface de transmissão 68
5.11 Diagrama do retificador de potência 68
5.12 Curva de resposta do sensor LTS – 6-NP 69
5.13 Placa com as interfaces de corrente 70
5.14 Correntes ia1, e ia2: (a) f = 20 Hz; (b) f = 60 Hz 70
5.15 Medida de posição x e y, rotor mais próximo do estator 71
5.16 Medida de posição x e y, rotor mais distante do estator 71 5.17 Curva de resposta do sensor de posição para o ferro e para o metal usado no
disco de medição 72
5.18 Interface de posição 73
5.19 Visão geral do módulo eZdsp™F2812® 73
5.20 Interface de visualização e programação 74
5.21 Diagrama geral do sistema de controle do motor-mancal 74
5.22 Lugar das raízes: (a) sistema em malha aberta; (b) sistema em malha fechada 77
5.23 Transformação do sinal de posição: (a) Transformação rotacional; (b)
Transformação bifásico – trifásica 78
5.24 Resposta dos controladores de corrente 81
5.25 Corrente Ia1, Ia2, Ic1 e Ic2: (a) controladores na região estável; (b) controladores
na região instável 82
6.1 Corrente de referência e corrente da bobina a1 para o motor operando com
frequência 60 Hz 85
6.2 Operação do motor, f = 30 Hz: (a) Posição do rotor; (b) Corrente ia1 e ia2 86
6.3 Limite de deslocamento radial do rotor 87
6.4 Correntes ia1, ia2, ic1 e ic2 – operação do motor-mancal sem limitação do sinal de
posição 88
6.5 Operação do motor-mancal, f = 60 Hz: (a) Região de dispersão; (b) Posição
eixos x e y 90
6.6 Operação do motor-mancal, f = 60 Hz, correntes ia1, ia2, ic1 e ic2 90
6.7 Operação do motor de indução, f = 60 Hz: (a) Região de dispersão; (b) Posição
eixos x e y 91
xiii
6.10 Operação do motor-mancal, f = 75 Hz, correntes ia1, ia2, ic1 e ic2 93
6.11 Operação do motor-mancal, f = 30 Hz: (a) Região de dispersão; (b) Posição
eixos x e y 94
6.12 Operação do motor-mancal, f = 30 Hz, ia1, ia2, ic1 e ic2 94
6.13 Operação do motor-mancal, f = 20 Hz: (a) Região de dispersão; (b) Posição
eixos x e y 95
6.14 Operação do motor-mancal, f = 20 Hz, ia1, ia2, ic1 e ic2 96
Tabela
Página
3.1 Entreferro para bobinas 29
3.2 Dimensões do motor 35
4.1 Número de terminais x terminais de alimentação do motor 52
4.2 Motores de indução úteis para aplicação motor-mancal 59
5.1 Parâmetros e características do motor 62
6.1 Parâmetros do controlador PI 86
6.2 Parâmetros do controlador PD 89
6.3 Mediana e Desvio Padrão, f = 60 Hz 91
6.4 Mediana e Desvio Padrão, f = 75 Hz 93
6.5 Mediana e Desvio Padrão, f = 30 Hz 95
xiv
Símbolo Descrição Pnominal Potência Nominal
ωnominal Velocidade Nominal Vnominal Tensão nominal
Inominal Corrente Nominal
RS eRR Resistências de estator e de rotor por fase L Indutância de uma bobina
LdS e LdR Indutâncias de dispersão do estator e do rotor por fase Lm Indutância de magnetização
LS e LR Indutâncias próprias do estator e do rotor por fase Ra Resistência da bobina do grupo auxiliar
Rp Resistência da bobina do grupo principal XLa Reatância indutiva do grupo auxiliar
Xc Reatância capacitiva do grupo auxiliar XLp Reatância indutiva do grupo principal
α Ângulo de deslocamento do rotor em relação ao eixo x
η Ângulo do eixo magnético da bobina em relação ao eixo x
t Tempo
f Frequência da corrente elétrica
ω Frequência angular da corrente elétrica
TR Constante de tempo do rotor np Número de pares de polos
J Momento de inércia do rotor σσσσ Fator de dispersão
km Constante de torque relacionada à indutância própria do estator D Fator de carga
0 Permeabilidade magnética N Número de espiras da bobina
Ag Área do pólo magnético g0 Medida do entreferro
l Comprimento
r Raio
j Operador complexo
xv
Bg Densidade de fluxo magnético no entreferro
ψ4 Fluxo magnético 4-polos
ψ2 Fluxo magnético 2-polos Fext Força externa
FMM Força magnetomotriz
FM Amplitude de força magnetomotriz FL Força de Lorentz
FMx Força de Maxwell
m
ℑ
Parte imaginária W Energia magnéticak Constante que depende do número de espiras, da permeabilidade do meio e da área magnética eficaz
k1 Constante dependente do deslocamento radial do rotor
m Massa
ρ Posição angular do fluxo do rotor
ε Posição angular instantânea do eixo do rotor
δ Posição angular instantânea do vetor de corrente de estator γ Deslocamento angular de 120º
S
i Vetor de corrente de estator R
i Vetor de corrente de rotor 2
1 S S ei
i Vetores de corrente das bobinas do estator *
2 *
1 S
S ei
i Conjugados dos vetores de corrente do estator
2 1 2 1 2
1
,
a,
b,
b,
c,
ca
i
i
i
i
i
i
Vetores de corrente das bobinas das fases a, b, e c*
i1, i*2, i3*, i*4, i*5ei6* Correntes individuais de referência para cada bobina do estator 2
1 R R ei
i Vetores de corrente das bobinas do rotor *
2 *
1 R
R ei
i Conjugados dos vetores de corrente do rotor
2 1 S S ,i
i e iS3 Valores instantâneos das correntes trifásicas do estator
Sa
i e iSb Valores instantâneos das correntes bifásicas em coordenadas do estator
Sd
i e iSq Valores instantâneos das correntes de campo e torque em
xvi *
R
i Conjugado do vetor de corrente do rotor
Ra
i , i , Rb iRc Vetores de correntes das bobinas das fases a, b, e c do rotor 2
1 mR mR
e
i
i
Vetores de corrente de magnetização do rotori2-polos Corrente 2-polos i4-polos Corrente 4-polos
IM Amplitude máxima da corrente elétrica ip Corrente elétrica do grupo principal ia Corrente elétrica do grupo auxiliar
ix e iy Correntes para controle de posição
ua, ub e uc
Sinais de corrente de posicionamento após a transformação rotacional e bifásico-trifásica
ux e uy
Sinais de corrente de posicionamento após a transformação rotacional
uα e uβ
Sinal de corrente de posicionamento à saída do controlador de posição
mM e mL Valores instantâneos do torque eletromagnético e do torque de carga
mec
ω e ωmR Valores instantâneos da velocidade mecânica e da velocidade de escorregamento
dt d
Operador de derivação de uma função ou variável
∂/∂t Derivada parcial de uma grandeza
∫
Operador de integração de uma função ou variávelsen x e cos x Funções seno e cosseno de um ângulo x genérico
e(x) Função exponencial de uma variável x genérica Y Valores instantâneos das saídas reais
erro Erro instantâneo entre duas variáveis
R(k) Sinal de referência de uma variável genérica
P(k) Ação de controle proporcional no instante k
I(k) Ação de controle integrativa no instante k
D(k) Ação de controle derivativa no instante k
xvii
X(k) Posição do rotor na direção X
Y(k) Posição do rotor na direção Y
posX, posY Sinais dos sensores de posição X e Y
erroX e erroY Sinais de erro de posição eixos X e Y
veloX e veloY Sinais de variação do erro dos sinais de posição eixo X e Y
u(k) Ação de controle genérica
+, -, * e / Operadores de soma, subtração, multiplicação e divisão
Va, Vb e Vc Tensão de alimentação alternada das fases a, b e c Vcc Tensão de alimentação contínua
VDSP Valor digital de uma grandeza no DSP
>> Deslocamento de bits à direita
<< Deslocamento de bits à esquerda
Bloco de integração numérica de variáveis
Bloco de cálculo de senos e cossenos
Bloco de implementação do controlador PI
Constante multiplicativa de valor n
Vetores de entrada e saída, conexões entre blocos
Ponto de conexão
Ponto de soma de variáveis
Ponto de divisão de variáveis
Ponto de multiplicação de variáveis
Sensor de posição ou corrente
Inversores PWM
Retificador
Bobina do motor elétrico
n
xviii
Viabilidade da Utilização de Máquinas de Indução Convencionais como
Motores sem Mancais Mecânicos
Valcí Ferreira Victor
Novembro de 2012.
Motores elétricos transformam energia elétrica em energia mecânica com relativa
facilidade. Em algumas aplicações particulares, necessita-se de motores elétricos para
trabalhar com fluídos sem contaminação, em regime de altas velocidades, em condições
inóspitas, ou, ainda, em locais de difícil acesso e à profundidade bastante considerável. Nestes
casos, os motores com mancais mecânicos, cujo desgaste ocasiona a necessidade de
manutenções, não são adequados. Uma solução possível para este problema advém de duas
alternativas: motores com mancais magnéticos, que têm o inconveniente de aumentar o
comprimento da máquina, e motores-mancais, que agregam compacidade. Motores de
indução têm sido cada vez mais utilizados em pesquisas, pois conferem maior robustez aos
motores-mancais comparados a esses tipos de máquinas construídas com outros motores. As
pesquisas já realizadas com motores-mancais de indução utilizaram protótipos, cujas
estruturas do estator e/ou rotor foram modificadas, diferindo em grande parte dos motores de
indução convencionais. É objetivo deste trabalho, estudar a viabilidade do uso dos motores de
indução convencionais para a aplicação de motores-mancais, apontando os tipos de motores
dessa categoria que mais se adéquam. O estudo utiliza o Método dos Elementos Finitos –
FEM. Como comprovação, um motor de indução convencional com rotor gaiola de esquilo foi
utilizado com sucesso para a aplicação de motor-mancal do tipo enrolamento dividido,
ratificando a tese proposta. O sistema de controle foi implementado em um Processador
Digital de Sinais – DSP.
xix
Viability of the Using Machines Induction Motors without bearings as
Conventional Mechanical
Valcí Ferreira Victor
November, 2012.
Electrical Motors transform electrical energy into mechanic energy in a relatively easy
way. In some specific applications, there is a need for electrical motors to function with
non-contaminated fluids, in high speed systems, under inhospitable conditions, or yet, in local of
difficult access and considerable depth. In these cases, the motors with mechanical bearings
are not adequate as their wear give rise to maintenance. A possible solution for these
problems stems from two different alternatives: motors with magnetic bearings, that increase
the length of the machine (not convenient), and the bearingless motors that aggregate
compactness. Induction motors have been used more and more in research, as they confer
more robustness to bearingless motors compared to other types of machines building with
others motors. The research that has already been carried out with bearingless induction
motors utilized prototypes that had their structures of stator/rotor modified, that differ most of
the times from the conventional induction motors. The goal of this work is to study the
viability of the use of conventional induction Motors for the beringless motors applications,
pointing out the types of Motors of this category that can be more useful. The study uses the
Finite Elements Method (FEM). As a means of validation, a conventional induction motor
with squirrel-cage rotor was successfully used for the beringless motor application of the
divided winding type, confirming the proposed thesis. The controlling system was
implemented in a Digital Signal Processor (DSP).
Capítulo 1 – Motores sem Mancais Mecânicos
1.1. Introdução
Motores elétricos são máquinas que transformam energia elétrica em mecânica com
relativa facilidade. Devido a essa característica esse tipo de máquina é amplamente utilizado
para as mais diversas aplicações.
O motor de corrente contínua foi o primeiro tipo desenvolvido, permanecendo, durante
muito tempo, sendo utilizado, principalmente na indústria, devido a sua simplicidade para
controle de velocidade necessário a um grande número de aplicações. O desacoplamento entre
o controle de torque e o controle de fluxo permitia um controle independente de velocidade e
de torque, produzindo, dessa forma, um bom desempenho em regime ou em transitório.
A grande desvantagem do motor de corrente contínua está associada à construção do
motor em si, cujo constante desgaste das escovas e comutadores, necessários ao
funcionamento, eleva os custos de manutenção e fabricação dos mesmos.
O motor de indução com rotor gaiola de esquilo apresenta inúmeras vantagens em
relação ao de corrente contínua, seu precursor. Construção relativamente simples, baixo custo
de fabricação, robustez mecânica, inexistência de elementos que produzam faíscas, baixíssimo
custo de manutenção, possibilidade de aplicação em ambientes perigosos, são algumas das
vantagens desse tipo de motor. Durante muito tempo, sua principal desvantagem foi a
dificuldade envolvida no controle, que limitou o uso desse motor para aplicações cujo
controle de velocidade e torque era necessário.
O desenvolvimento de técnicas de controle mais eficientes e também o avanço
conseguido com os acionamentos por meio da eletrônica de potência ampliaram o uso do
motor de indução para aplicações onde os motores de corrente contínua eram bastante
empregados, dada à necessidade de controle de velocidade mais acurado.
Devido às características mencionadas, o motor de indução com rotor em gaiola de
esquilo passou a ser utilizado em um número cada vez maior de aplicações, sendo atualmente
o tipo de motor elétrico mais utilizado.
Contudo, mesmo o motor de indução convencional, rotor gaiola de esquilo, apresenta
dificuldades para algumas aplicações bem específicas, residentes nos mancais mecânicos que
A eliminação/substituição dos mancais mecânicos é um fator que produziria melhor
custo-benefício e maior eficiência. Por exemplo, em máquinas sem mancais mecânicos, a
função de sustentação do eixo é realizada magneticamente.
1.2. Motores sem Mancais Mecânicos
Dentre as justificativas para a construção de motores sem mancais mecânicos
podem-se citar:
• Necessidade de redução dos custos de manutenção ocasionados pelos desgastes dos mancais mecânicos;
• Dificuldade e alto custo para realização de serviços de manutenção e/ou substituição dos mancais em algumas aplicações específicas (bombas submersas); • Condições inóspitas (alta temperatura, fluido radioativo, etc.);
• Necessidade de circulação de fluídos isentos de contaminação; • Operação a altíssimas velocidades;
• Aumento da robustez.
As soluções conhecidas para a substituição dos mancais convencionais são os motores
com mancais magnéticos e os motores-mancais.
Os motores-mancais, ou máquinas sem mancais como denominado em alguns
trabalhos, é segundo as definições clássicas: “motor com a função de mancal integrada
magneticamente” ou “mancal magnético com a função de motor integrada magneticamente”
(Chiba, 2005). Conforme estas definições um motor-mancal se diferencia de um motor
convencional por ter a função mancal magneticamente integrada.
Historicamente, observa-se que surgiu a primeira ideia para substituição dos mancais
mecânicos na década de 1970: os mancais magnéticos.
Os mancais magnéticos se constituíam em eletroímãs que substituíam os mancais
mecânicos durante o funcionamento do motor fazendo com que o rotor levitasse (Hermann,
1973), (Hermann, 1974). A Figura 1.1 apresenta o diagrama esquemático do mancal
magnético.
A operação do mancal para centralização do rotor é realizada pela atuação de forças
eletromagnéticas produzidas nos pares de bobinas situados na direção x (esquerda e direita) e
Figura 1.1 – Diagrama esquemático do mancal magnético.
A força de atração magnética produzida por cada bobina é ajustada através de um
controlador de corrente que atua em modo diferencial para as duas bobinas diametralmente
opostas. Na direção y, por exemplo, um aumento do comprimento do entreferro na parte
superior é acompanhado de proporcional diminuição na parte inferior. Neste caso, para que o
rotor volte à posição inicial, a corrente elétrica na bobina superior é aumentada na mesma
proporção que se diminui a corrente na bobina inferior, de modo que a força magnética radial
aumente na direção do maior entreferro, conduzindo o rotor à centralização.
Os mancais magnéticos dispensam o uso de mancais mecânicos para sustentação do
eixo da máquina. Mas, por outro lado, se faz necessário o aumento do comprimento da
máquina para que seja possível alojar os mancais magnéticos, tornando-se as máquinas
maiores que as convencionais para mesma potência. A Figura 1.2 apresenta a estrutura básica
de uma máquina com mancais magnéticos.
A proposta de uma máquina sem mancais mecânicos (Boch, 1988), cuja força de
posicionamento radial era ajustada a partir da corrente elétrica de excitação do motor,
dispensava o uso de mancais magnéticos e dos adicionais espaços necessários para alojamento
dos mesmos. Em contrapartida, surge um aumento na complexidade relacionada ao controle
da máquina. A Figura 1.3 apresenta a estrutura básica de um motor-mancal.
Figura 1.3 – Motor-mancal.
Os motores-mancais, em comparação às máquinas com mancais magnéticos,
apresentam como principal vantagem a compacidade da máquina para produção de torque e
de forças de sustentação do rotor, função mancal. Por outro lado, a potência da máquina deve
ser dividida para a realização desta dupla função.
Os motores-mancais foram desenvolvidos utilizando-se diversos tipos de
motores/estruturas: motor síncrono de relutância (Chiba, 1990), máquina de indução sem
mancal (Chiba, 1991), motor sem mancal utilizando imã permanente (Chiba, 1994), motor de
relutância comutada (Preston, 1994), motor sem mancal tipo homopolar (Ichikawa, 1999) e
algumas estruturas especiais, tais como, rotor tipo disco (Ueno, 2000), rotor externo
(Masuazawa, 2000) e rotor tipo anel (Schob, 1998).
Os estatores dos motores-mancais apresentam duas configurações básicas: 1) dois
enrolamentos, sendo um para a produção de forças radiais e o outro para a produção de
torque; 2) um único enrolamento para a produção tanto de forças radiais quanto de torque. Os
rotores podem ser encontrados basicamente em três tipos: 1) gaiola de esquilo convencional;
2) gaiola modificada, estrutura 4-polos; 3) ímã permanente.
A denominação da máquina geralmente é tomada do tipo de motor utilizado como
base para construção e de características como configuração do estator e/ou rotor. Por
motor de indução com estator de duplo enrolamento (motor de dupla velocidade realizada por
comutação de enrolamento).
O desenvolvimento das máquinas com mancais magnéticos, bem como dos
motores-mancais, foi acompanhado do prévio desenvolvimento das estratégias de controle de campos
magnéticos; integração dos inversores e controladores digitais para alimentação do
enrolamento motor e do enrolamento de controle de posicionamento; aplicação da técnica de
controle vetorial, entre outros.
1.3. Motores-Mancais de Indução
Os motores de indução, devido às características já mencionadas, têm sido cada vez
mais utilizados para a construção de motores-mancais. Nos motores-mancais de indução a
função motor e a função mancal são realizadas pelo(s) enrolamento(s) estatórico(s).
Ao longo dos anos, dois tipos de motores-mancais de indução foram propostos: os
motores-mancais de indução do tipo duplo enrolamento (Chiba, 1990) e os motores-mancais
do tipo enrolamento dividido (Salazar, 1993).
O primeiro utiliza enrolamentos distintos dispostos no estator, nos quais são realizadas
as funções de produção de torque e de força de posicionamento radial do rotor. O segundo
tipo utiliza o mesmo enrolamento estatórico para ambas as funções. As pesquisas realizadas
neste trabalho terão como base o motor-mancal de indução do tipo enrolamento dividido.
As pesquisas com motores-mancais de indução do tipo duplo enrolamento se
desenvolvem em grande parte no Japão. No Brasil, as pesquisas com motores-mancais de
indução do tipo enrolamento dividido são realizadas na Universidade Federal do Rio de
Janeiro (UFRJ), Universidade Federal Fluminense (UFF) e na Universidade Federal do Rio
Grande do Norte (UFRN).
No final da década de 1980, na UFRJ, foi proposto o uso do próprio enrolamento do
estator para função de mancais magnéticos em motores de corrente alternada (Salazar, 1990).
Em 1999, foi realizado o estudo do efeito de aplicação de carga torsional sobre o
posicionamento radial de um motor mancal (Santisteban, 1999).
Em 2000, foi proposta a levitação do rotor por motor-mancal radial e mancal
magnético por supercondutor (David, 2000). Em 2003, o controle simultâneo de velocidade e
posição em mancais motores magnéticos (Cardozo, 2003). Em 2007, a implementação do
modelagem e controle do motor de indução suportado magneticamente é apresentada na UFF
(Rodriguez, 2010).
Na UFRN, no início da década de 2000, foi proposta a máquina sem mancal trifásica
de bobinado dividido para operação na vertical (Ferreira, 2002). Dois anos após, foram
realizadas otimizações do sistema de posicionamento radial do eixo do motor com o mesmo
funcionando na horizontal (Castro, 2004), sendo o controle realizado através do DSP. A
máquina utilizada teve o rotor adaptado para minimizar a influência das correntes
responsáveis pela produção de torque eletromagnético sobre o controle de posicionamento
radial. Um modelo de quatro polos foi confeccionado com circuitos independentes (Chiba,
1998).
Em 2006, foi realizada a modelagem matemática do motor-mancal trifásico baseada
no modelo vetorial da máquina de indução trifásica convencional (Ferreira, 2006), (Leonhard,
2001).
Em 2007, foi implementado um sistema de controle vetorial de velocidade rotacional
com o motor-mancal trifásico com bobinado dividido, utilizando duas redes neurais tipo
feedfoward multicamadas para estimação da magnitude da corrente de magnetização e
velocidade do fluxo do rotor (Paiva, 2007). Todo o sistema identicamente ao anterior foi
controlado digitalmente por um DSP.
Em 2011, foram implementadas novas interfaces eletrônicas, proporcionando mais
imunidade a ruídos e melhor qualidade dos sinais que são processados pelo sistema de
controle no DSP (Sousa Filho, 2011).
O presente trabalho avalia o uso de motores de indução convencionais para aplicação
de motores sem mancais mecânicos.
1.4. Justificativas e Objetivos
Avaliando-se as primeiras propostas para construção de máquinas sem mancais
mecânicos e o desenvolvimento dos motores-mancais, nota-se, por algumas razões expostas,
uma tendência de compactação da máquina. Os motores-mancais se aproximam mais de um
motor convencional que os motores com mancais magnéticos.
O motor-mancal de indução do tipo enrolamento dividido em relação ao do tipo duplo
enrolamento é mais semelhante a um motor de indução convencional. No entanto, várias
modificações têm sido realizadas/propostas na estrutura do motor do tipo enrolamento
As pesquisas realizadas com o motor de indução do tipo enrolamento dividido têm
sempre se utilizado de protótipos que apresentam modificações no rotor ou estator. O motor
de indução convencional agrega aos motores-mancais robustez, praticidade e menor custo.
Este trabalho tem como objetivo estudar a viabilidade da utilização de máquinas de
indução convencionais para a construção de motores sem mancais mecânicos apresentando os
tipos de motores de indução mais aplicáveis. Para isto, os motores de indução convencionais
serão avaliados segundo as características próprias à construção de motores-mancais.
Validando o estudo, o motor-mancal de indução será implementado, utilizando-se um motor
de indução convencional trifásico, 3,7 KW, 4-polos, 1715 RPM, rotor gaiola de esquilo.
1.5.Sumário
Uma breve descrição dos conteúdos de cada um dos Capítulos deste trabalho é
apresentada a seguir:
O Capítulo 2 apresenta os dois tipos de motores-mancais de indução, mostrando mais
detalhadamente o modo como as forças radiais de restauração da posição do rotor são
produzidas.
No Capítulo 3, é apresentada a modelagem do motor-mancal de indução trifásico do
tipo enrolamento dividido.
O Capítulo 4 apresenta as diversas características dos motores-mancais radiais de
indução.
A implementação do sistema mecatrônico motor-mancal de indução é apresentada no
Capítulo 5.
O Capítulo 6 traz os resultados experimentais da implementação do motor-mancal de
indução do tipo enrolamento dividido.
Capítulo 2 – Forças Radiais nos Motores-Mancais de Indução
2.1. Introdução
As estruturas de sustentação do eixo dos motores-mancais são construídas de acordo
com o número de graus de liberdade do rotor que são passíveis de serem controlados. Para a
levitação do eixo é necessário o controle de cinco graus de liberdade. Excluindo-se o
movimento giratório do rotor, deve existir um controle axial (eixo z), e quatro radiais (eixo x e
y), Figura 2.1.
Figura 2.1 – Graus de liberdade do rotor.
A Figura 2.2 apresenta dois tipos de estruturas utilizadas para a construção de
motores-mancais, outros tipos podem ser vistos na literatura (Chiba, 2005). Esses dois tipos
de estruturas foram utilizadas nos trabalhos de (Ferreira, 2002) – mancal radial magnético e
mancal axial-radial mecânico e de (David, 2000) – mancais radiais magnéticos e mancal axial
por supercondutor.
Figura 2.2 – Estrutura para suspensão magnética: (a) com dois graus de liberdade; (b) com cinco
Os motores-mancais radiais de indução são máquinas elétricas giratórias, cujas
estruturas possibilitam o controle do movimento do rotor com graus de liberdades unicamente
radiais (o rotor é fixo axialmente). A centralização do rotor é conseguida utilizando-se um
controle ativo das forças eletromagnéticas de restauração da posição radial (eixo-x e y). As
estratégias para geração dessas forças para os dois tipos de motores-mancais de indução são
apresentadas a seguir.
2.2. Geração de Forças em Motores de Indução
Em um motor elétrico, é possível identificar dois tipos de forças de atuação
eletromagnética: força de Lorentz e força de Maxwell. A primeira age na direção tangencial,
sendo própria para a produção do torque eletromagnético necessário ao movimento de rotação
do rotor. A segunda age na direção normal, sendo utilizada nos motores-mancais radiais para
centralização do rotor no estator.
Nos motores de indução convencionais, se busca maximizar a produção das forças de
Lorentz e nos motores-mancais de indução, um equilíbrio entre essas duas forças, de maneira
que seja possível a produção de torque e de forças de restauração da posição do rotor.
As forças de Lorentz e Maxwell, apresentadas na Figura 2.3, são dadas em módulo
respectivamente por:
)
.
( B
l
i
F
L=
(2.1)g g
Mx
A
B
F
0 2
2
µ
=
(2.2)onde:
FL é a força de Lorentz;
FMx é a força de Maxwell;
i é a corrente que circula no condutor; B é a densidade de fluxo;
Bg é a densidade de fluxo no entreferro;
l é o comprimento ativo do condutor; Ag é a área eficaz atravessada pelo fluxo;
Figura 2.3 – Forças de Maxwell e de Lorentz em um motor-mancal.
A direção e o sentido da força de Lorentz dependem do vetor densidade de fluxo
magnético e do sentido da corrente no condutor. A força de Maxwell é sempre uma força de
atração que tende a diminuir o entreferro.
A força de Maxwell, dada por (2.2), pode também ser escrita em função da indutância
e da corrente da bobina, como em (2.3). Esta forma é bastante utilizada para o controle de
posição do rotor por trabalhar com grandezas terminais (corrente).
2
2
1
i
h
L
F
Mx∂
∂
=
(2.3) onde:
L é a indutância da bobina; h é o deslocamento.
O termo quadrático da corrente em (2.3), assim como no caso da densidade de fluxo
em (2.2), conduz a forças de Maxwell sempre positivas, tornando-as uma força de atração não
importando o sentido da corrente aplicada na bobina. A Figura 2.4 apresenta as forças
magnéticas atuando sobre o rotor para o caso de um par de bobinas instaladas no estator de
uma máquina de indução; a frequência das correntes aplicadas às bobinas é igual a 60 Hz.
Na Figura 2.4, o período da onda de força de Maxwell é igual a 8,33 ms, metade do
período da corrente aplicada às bobinas. A frequência da força de Maxwell, conforme prevista
Figura 2.4 – Forças de Maxwell para corrente com frequência 60 Hz.
As forças de Maxwell em máquinas rotativas são geradas pela variação do fluxo
magnético no entreferro. A geração das forças de Maxwell pode ser compreendida
observando-se a Figura 2.5 e o desenvolvimento que se segue.
Por questões de simplificação, somente uma linha de fluxo é apresentada mostrando o
caminho preferencial através do estator – entreferro – rotor.
ia1 (a1) (a2)
a2 i
Figura 2.5 – Representação esquemática do fluxo magnético para um par de bobinas no estator,
máquina de quatro polos.
Considerando-se o rotor centralizado, alimentando-se a bobina (a1) com corrente ia1,
tem-se a distribuição de fluxo apresentada pela linha contínua. Esta distribuição produz uma
concentração de fluxo na região do entreferro à direita, ocasionando uma força F que tende a1
0 5 10 15 20 25 30 35
0 100 200 300 400 500 600
t (ms)
F
o
rç
a
(
N
a mover o rotor para a direita. Alimentando-se ambas as bobinas com as correntes ia1 e ia2 de
mesma amplitude, a força resultante, agindo sobre o rotor, será igual a zero para o rotor
centralizado no estator. Pequenos deslocamentos para a direita tornam a amplitude da força
1 a
F maior que Fa2, produzindo uma força resultante que tende a mover o rotor nesta direção. Analogamente para o rotor centralizado, alimentando-se a bobina (a2) com uma
corrente ia2, tem-se a distribuição de fluxo apresentada pela linha tracejada. A forçaFa2 produzida tende a mover o rotor para a esquerda. Deslocamentos para a esquerda produzem
uma força resultante que tende a mover o rotor para esta direção.
Dado que, aleatoriamente ou por ação de uma força externa, o deslocamento radial do
rotor ocorra na direção do eixo das bobinas no sentido positivo de x, a força resultante tenderá
a crescer devido à diminuição do entreferro fazendo com que o rotor seja encostado no
estator.
A variação de posição do rotor em uma determinada direção será acompanhada do
aumento da força conduzindo à diminuição do entreferro. Daí se conclui que somente um
controle de forças ativo pode manter o rotor centralizado.
Como a composição de forças em um plano pode ser conseguida a partir de somente
duas direções, é possível produzir forças de restauração para a centralização do rotor
utilizando-se conjuntos de bobinas instalados em eixos ortogonais de forma que a posição
possa ser controlada a partir da variação das correntes nas bobinas como mostrado na Figura
2.5.
2.3. Motor-Mancal Radial de Indução Tipo Duplo Enrolamento
A Figura 2.6 apresenta de forma simplificada as distribuições de fluxo na seção
transversal de um motor-mancal de indução bifásico com os enrolamentos N4 e N2 com 4 e 2-polos, respectivamente. Nela, se pode observar o princípio de geração de forças radiais de
posicionamento do rotor para motores-mancais do tipo duplo enrolamento.
Excitando-se o enrolamento N4 com corrente senoidal, produz-se uma distribuição simétrica de fluxo ψ4 mostrada pelas linhas contínuas. Excitando-se o grupo N2a com correntes entrando e saindo na configuração apresentada, o fluxo ψ2a produzido aumenta a
densidade de fluxo na região do entreferro à direita e reduz na região do entreferro à esquerda
como apresentado na Figura 2.6(a) pelas linhas tracejadas. Desta forma, a distribuição
Figura 2.6 – Motor-mancal tipo duplo enrolamento – geração de força radial: (a) sentido positivo do
eixo x; (b) sentido negativo do eixo x.
O desbalanceamento do campo magnético resulta em força radial aplicada ao rotor no
sentido positivo de x; pela inversão do sentido da corrente no grupo N2a a densidade de fluxo será aumentada na região do entreferro à esquerda e reduzida à direita e a força radial aplicada
será no sentido negativo de x, como mostrada na Figura 2.6 (b).
Analogamente, a geração de força radial na direção y em ambos os sentidos pode ser
conseguida pela mudança no sentido da corrente aplicada ao grupo N2b. Assim, são geradas as forças radiais para posicionamento do rotor a partir de qualquer posição.
Os enrolamentos N4 e N2 (composto por N2a e N2b) são denominados na literatura como enrolamento motor (ou de acionamento) e enrolamento mancal (ou de suspensão). A
relação entre os números de polos dos dois enrolamentos do estator é descrita por np1 = np2 + 2
onde np1 e np2 são os números de pares de polos dos enrolamentos de torque (suspensão) e
suspensão (torque), respectivamente.
2.4. Motor-Mancal Radial de Indução tipo Enrolamento Dividido
A Figura 2.7 apresenta as distribuições de fluxo na seção transversal de um
motor-mancal de indução bifásico com o enrolamento 4-polos N4. Nela, se pode observar o princípio de geração de forças radiais de posicionamento do rotor para motores-mancais radiais de
indução do tipo enrolamento dividido. Por simplicidade, somente as bobinas de uma fase são
Excitando-se o enrolamento N4 com corrente senoidal, é produzida a distribuição simétrica de fluxo ψ4 mostrada pelas linhas contínuas. Aumentando-se a corrente de I1 no
grupo à direita N4d e simultaneamente diminuindo-se a corrente de I1 no grupo à esquerda N4e, os fluxos ψ4d e ψ4e são produzidos, representados pelas linhas tracejadas na Figura 2.7(a).
A densidade de fluxo na região do entreferro à direita é aumentada, enquanto que na região do
entreferro à esquerda é diminuída. A distribuição simétrica do fluxo 4-polos ψ4 é
desbalanceada.
O desbalanceamento do campo magnético resulta em força radial aplicada ao rotor no
sentido positivo de x, Figura 2.7 (a).
Analogamente diminuindo-se a corrente de I1 no grupo à direita N4d e simultaneamente aumentando-se a corrente de I1 no grupo à esquerda N4e, os fluxos ψ4d e
ψ4e são produzidos, representados pelas linhas tracejadas na Figura 2.7(b). A densidade de
fluxo na região do entreferro à esquerda é aumentada, enquanto que na região do entreferro à
direita é diminuída. A distribuição simétrica do fluxo 4-polos ψ4 é desbalanceada.
Na região superior e inferior do entreferro, os fluxos criados pelos desbalanceamentos
de corrente se opõem, não contribuindo para desbalancear o fluxo ψ4 na direção vertical.
O desbalanceamento do campo magnético nas regiões do entreferro à direita e à
esquerda resulta em força radial aplicada ao rotor no sentido negativo de x, Figura 2.7 (b).
∆Ι1
∆Ι1
∆Ι1
∆Ι1
Figura 2.7 – Motor-mancal do tipo enrolamento dividido – geração de força radial: (a) sentido
A geração de forças radiais na direção y é realizada da mesma forma que para o eixo x
desbalanceando as correntes dos grupos de bobinas da segunda fase, cujo eixo está deslocado
de 90o. Os grupos de bobinas da segunda fase não estão representados na Figura 2.7.
Desse modo, são geradas as forças de restauração para posicionamento do rotor a
partir de qualquer posição.
O enrolamento N4 tem a dupla função de produção de torque eletromagnético e de forças de restauração para posicionamento do rotor. A potência total da máquina fica dividida
para realização destas duas funções.
Observando-se as distribuições de fluxo no entreferro, nota-se que, em ambos os tipos
de máquinas, os desbalanceamentos no fluxo principal (produção de torque) nas regiões do
entreferro são idênticos, como era de se esperar para restauração da posição do rotor em uma
mesma direção e sentido. A diferença se encontra na forma como o desbalanceamento do
fluxo é produzido. Na máquina de duplo enrolamento, o desbalanceamento ocorre pela
produção de um segundo fluxo originado no enrolamento mancal; na máquina de enrolamento
dividido, o desbalanceamento do fluxo é produzido pelo desbalanceamento das correntes que
alimentam cada um dos grupos de bobinas da fase diametralmente distribuídos.
2.5. Motores-Mancais Radiais de Indução – Tipos de Rotores
Dois tipos de rotores têm sido utilizados para a construção de motores-mancais de
indução, rotor gaiola de esquilo e rotor com estrutura de pequenos circuitos 4-polos (Chiba,
1998). A Figura 2.8 apresenta de forma simplificada o circuito de ambos os rotores.
Figura 2.8 – Rotores de motores-mancais: (a) Rotor gaiola de esquilo; (b) Rotor 4-polos.
O rotor tipo gaiola de esquilo apresenta como grande vantagem a praticidade e
robustez. Por outro lado, devido ao seu projeto para maximização do torque os níveis de
O rotor 4-polos necessita de usinagem para construção do motor-mancal. O torque
produzido por uma máquina com esse tipo de rotor é inferior ao conseguido com o rotor em
gaiola de esquilo convencional.
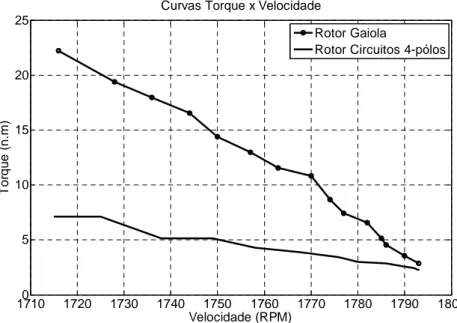
As curvas torque versus velocidade para o motor-mancal utilizado neste trabalho com
ambos os tipos de rotores são apresentadas na Figura 2.9. Nela, é possível notar um menor
torque para o motor com rotor 4-polos, principalmente na faixa de velocidade próxima à
velocidade nominal do motor, 1715 RPM.
Figura 2.9 – Curvas torque x velocidade motor-mancal 3,7 HP, 4-polos, 1715 RPM, com
rotor gaiola de esquilo e rotor com estrutura 4-polos.
Considerando-se um motor-mancal com estator 4-polos, com ambos os tipos de
rotores, a distribuição de fluxo magnético produzido pelo enrolamento do estator é
apresentada de forma simplificada nas Figuras 2.10 a 2.13. Para facilitar a compreensão, se
utiliza um rotor com somente quatro barras.
A Figura 2.10(a) mostra a seção transversal do motor-mancal com rotor estrutura
4-polos, no qual é apresentada a configuração das correntes induzidas no rotor devido ao campo
4-polos do estator.
Segundo a lei de Lenz, a corrente induzida no rotor se opõe a causa que a produziu.
Para a circulação de correntes 4-polos no enrolamento do estator, as correntes induzidas no
rotor se apresentam entrando nas barras 1, 3 e saindo nas barras 2, 4. Na Figura 2.10(b),
pode-se obpode-servar o pode-sentido da corrente em cada trecho do anel e também das barras do rotor.
17100 1720 1730 1740 1750 1760 1770 1780 1790 1800
5 10 15 20 25
Curvas Torque x Velocidade
Velocidade (RPM)
T
o
rq
u
e
(
n
.m
)
Rotor Gaiola
A Figura 2.11(a) mostra o sentido das correntes induzidas no rotor para a circulação de
correntes 2-polos no enrolamento do estator.
Observando-se, na Figura 2.11(b), o sentido da corrente em cada trecho do rotor,
(barras e anéis) nota-se que correntes 2-polos produziriam a circulação de correntes em
sentidos opostos para um mesmo trecho do circuito, o que de fato é uma impossibilidade.
Veja-se, por exemplo, a circulação de correntes nos anéis entre as barras 1 – 2, 2 – 3, 3 – 4, e
4 – 1. Conclui-se que este tipo de rotor com estrutura 4-polos, devido a sua geometria,
restringe a circulação de correntes induzidas 2-polos.
Figura 2.10 – Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor 4-polos, i4-polos induzidas.
Figura 2.11 – Sentido das correntes: (a) Estator – campo i2-polos; (b) Rotor 4-polos, i2-polos induzidas.
Nas Figuras 2.12(a) e 2.13(a), são apresentadas as distribuições de fluxo do estator
possível a circulação de corrente induzidas no rotor tanto de 4-polos como de 2-polos, Figura
2.12(a) e 2.12(b).
Neste caso, devido à produção de correntes induzidas 2-polos, existirá certo atraso na
atuação do controle de posicionamento (Castro, 2004). Segundo Chiba, se faz necessário a
compensação para atraso e erro de direção no posicionamento ocasionado pelo uso do rotor
em gaiola de esquilo em motores-mancais de indução (Chiba et al, 2007).
Figura 2.12 – Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo, i4-polos
induzidas.
Figura 2.13 – Sentido das correntes: (a) Estator – campo i4-polos; (b) Rotor gaiola de esquilo, i2-polos
2.6. Simulação de Forças Radiais para Motor-Mancal Radial de Indução
Como forma de comparar o nível das forças de Maxwell, produzidas em um
motor-mancal radial de indução 4-polos, utilizando cada um dos tipos de rotor apresentados nas
Figuras 2.9 e 2.11, algumas simulações foram realizadas utilizando o Método dos Elementos
Finitos – FEM.
O motor-mancal utilizado na simulação é do tipo trifásico. Cada fase possui seis
bobinas, sendo três a três ligadas em série e esses conjuntos divididos e alimentados
individualmente por correntes senoidais de mesmo ângulo de fase. As bobinas possuem cada
uma 103 espiras. A distribuição do enrolamento no estator pode ser verificada na Figura 3.1
no capítulo seguinte.
Como forma de avaliar a influência das forças produzidas em somente um eixo as
bobinas das outras duas fases não foram energizadas.
A Figura 2.14 apresenta a simulação, considerando um desbalanceamento de corrente
igual a 80% para ambas as bobinas da fase. A corrente nominal para a bobina é igual a 4,06
A. A força magnética de Maxwell para o motor com rotor 4-polos é 37,55% superior, àquela
produzida com o rotor em gaiola de esquilo convencional.
Figura 2.14 – Força de Maxwell para motor com rotor gaiola e rotor 4-polos, delta i = 80%.
0 5 10 15 20 25 30
0 5 10 15 20 25 30 35
Tempo (ms)
F
o
rç
a
(
N
)
2.7. Conclusões
Em resumo, se pode afirmar que as forças de posicionamento radiais para o rotor são
geradas pela modificação da densidade de fluxo em regiões especificas do entreferro. Para
conseguir esta variação, altera-se o sentido e/ou a intensidade da corrente em um ou mais
grupos-bobinas do estator.
Pode-se dizer que, em ambos os tipos de máquinas, o enrolamento é dividido com o
fim de realizar a função mancal. Com relação ao tamanho da máquina, pode-se afirmar que as
máquinas do tipo enrolamento dividido se aproximam mais do tamanho das máquinas
convencionais, pois somente um enrolamento é utilizado sendo o estator idêntico aos dos
motores de indução convencionais.
As forças radiais produzidas por motores-mancais de indução com rotor gaiola de
esquilo são úteis para o posicionamento do rotor, apesar de serem em magnitude inferiores
àquelas produzidas nos motores-mancais com o rotor circuitos 4-polos.
A possibilidade de construção de motores-mancais com rotor gaiola de esquilo é
indicada também pela construção de protótipos de motores-mancais de indução, ainda que o
Capítulo 3 – Modelo do Motor-Mancal de Indução do Tipo
Enrolamento Dividido
3.1. Introdução
O modelo utilizado e apresentado, neste trabalho, é tomado de (Ferreira, 2006). O
referencial do fluxo do rotor é utilizado por possuir um menor número de equações sem
perdas significativas da exatidão (Santisteban, 2001). Modelos em coordenadas do rotor
foram utilizados em outros trabalhos com motores-mancais nas últimas pesquisas realizadas
na UFRN (Ferreira, 2006), (Paiva, 2007).
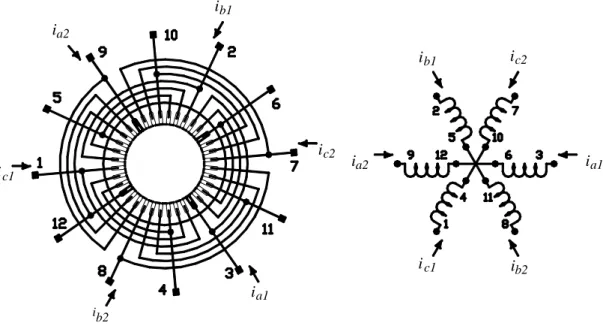
A Figura 3.1 apresenta a distribuição das bobinas no estator e as correntes em cada
meio grupo do enrolamento para o motor-mancal utilizado na pesquisa.
a1
i ia2
b2
i ic2 b1
i
ic1
a1
i ia2
b1
i
b2 i
ic2 c1
i
Figura 3.1 – Esquema de distribuição das bobinas do estator.
O enrolamento será considerado como dois conjuntos de bobinas, a1– b1 – c1 e a2–
b2 – c2, defasadas de 120o entre si.
3.2. Modelo da Máquina
No modelo, para facilitar a manipulação e controle, as equações para o torque e a
3.2.1. Correntes do Rotor e Estator
De acordo com a Figura 3.1, os vetores de correntes, e os conjugados destes são dados
por (3.1) e (3.2)
3 2 1 3 2 1 1 1 3 2 1 3 2 1 1 1
)
(
)
(
)
(
)
(
*
)
(
)
(
)
(
)
(
π π π π j c j b a S j c j b a Se
t
i
e
t
i
t
i
t
i
e
t
i
e
t
i
t
i
t
i
− −+
+
=
+
+
=
(3.1) 3 2 3 2 2 2 3 2 3 2 2 2)
(
)
(
)
(
)
(
*
)
(
)
(
)
(
)
(
π π π π π π j c j b j a S j c j b j a Se
t
i
e
t
i
e
t
i
t
i
e
t
i
e
t
i
e
t
i
t
i
− − −+
+
=
+
+
=
(3.2) onde: 2 1 S Se
i
i
são os vetores de correntes dos conjuntos de bobinas do estator;* 2 * 1 S S
e
i
i
são os conjugados dos vetores de corrente do estator;2 1 2 1 2
1
,
a,
b,
b,
c,
ca
i
i
i
i
i
i
são os vetores de corrente das bobinas das fases a, b e c,respectivamente.
Os vetores de correntes dados podem ser compactados como
)
(
)
(
)
(
t
i
1t
i
2t
i
S=
S+
S (3.3)Para o motor-mancal com rotor em gaiola de esquilo, as correntes do rotor serão
tratadas como um reflexo das correntes do estator, identicamente para os motores de indução
convencionais. O vetor de correntes do rotor será representado por
3 4 3 2 * 3 4 3 2
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
π π π π j Rc j Rb Ra R j Rc j Rb Ra Re
t
i
e
t
i
t
i
t
i
e
t
i
e
t
i
t
i
t
i
− −+
+
=
+
+
=
(3.4)As correntes do rotor serão um reflexo das correntes dos dois conjuntos de bobinas do
estator, pois a corrente por fase é sempre a mesma independente dos desbalanceamentos dos
dois meios grupos ligados à mesma fase. A orientação será tomada como sendo a do primeiro