Faculdade de Ciências e Tecnologia
Programa de Pós-Gradua
ç
ão em Ciências Cartográficas
MARCELO TOMIO MATSUOKA
AVALIAÇÃO DE FUNÇÕES PARA MODELAGEM DO
EFEITO DA REFRAÇÃO IONOSFÉRICA NA
PROPAGAÇÃO DOS SINAIS GPS
AVALIAÇÃO DE FUNÇÕES PARA MODELAGEM DO
EFEITO DA REFRAÇÃO IONOSFÉRICA NA
PROPAGAÇÃO DOS SINAIS GPS
Dissertação apresentada ao Programa de Pós-Graduação em Ciências Cartográficas da Faculdade de Ciências e Tecnologia da UNESP, para a obtenção do título de Mestre em Ciências Cartográficas.
Orientador:
Prof. Dr. Paulo de Oliveira Camargo
MARCELO TOMIO MATSUOKA
Nascimento 09/10/1978 – Novo Horizonte/SP.
Filiação Cláudio Takeshi Matsuoka. Maria Neli Rodrigues Matsuoka.
1996 – 2000 Curso de Graduação.
Faculdade de Ciências e Tecnologia da Universidade Estadual Paulista “Júlio de Mesquita Filho” – Campus de Presidente Prudente.
Engenharia Cartográfica.
2001 – 2003 Programa de Pós-Graduação em Ciências Cartográficas da Faculdade de Ciências e Tecnologia da Universidade Estadual Paulista “Júlio de Mesquita Filho” – Campus de Presidente Prudente.
Aos meus queridos pais, Maria Neli Rodrigues
Matsuoka e Cláudio Takeshi Matsuoka, ao
meu irmão Toshio e a querida Jaque.
Por todo apoio, incentivo e confiança em todos os momentos.
Aos meus avós, Geremias Rodrigues (in
memoriam), Rosa Dias Rodrigues, Ryosako
E ainda que tivesse o dom de profecia, e
conhecesse todos os mistérios e toda a ciência,
e ainda que tivesse toda fé, de maneira tal que
transportasse os montes, e não tivesse amor,
nada seria.
LISTA DE FIGURAS ...16
LISTA DE TABELAS ...19
LISTA DE SIGLAS E ABREVIATURAS ...20
RESUMO ...22
ABSTRACT ...23
1 INTRODUÇÃO ...18
1.1 DESCRIÇÃO GERAL ...18
1.2 OBJETIVOS ...24
1.3 JUSTIFICATIVA ...24
1.4CONTEÚDO DO TRABALHO ...25
2 SISTEMA DE POSICIONAMENTO GLOBAL ...26
2.1 CARACTERÍSTICAS DOS SINAIS GPS ...26
2.2 OBSERVÁVEIS GPS ...28
2.2.1 Pseudodistância ... 28
2.2.2 Fase da onda portadora ... 31
2.3 ERROS ENVOLVIDOS NAS OBSERVÁVEIS ...32
2.4 POSICIONAMENTO COM GPS ...34
2.4.1 Posicionamento por ponto ... 36
3 IONOSFERA ...38
3.1 DIVISÃO DA ATMOSFERA ...38
3.2 ESTRUTURA DA IONOSFERA ...40
3.3 CAUSAS DAS VARIAÇÕES DO CONTEÚDO TOTAL DE ELÉTRONS ...44
3.3.1 Variações temporais ... 44
3.3.2 Influência da variação da radiação solar ... 46
3.3.3 Regiões geográficas da ionosfera ... 47
3.3.4 Campo magnético terrestre ... 48
4.1 REFRAÇÃO IONOSFÉRICA ...51
4.2FUNÇÕES DE MAPEAMENTO ...61
4.3 FUNÇÕES DE MODELAGEM DO ATRASO IONOSFÉRICO VERTICAL ...65
4.3.1 Série de Fourier ... 66
4.3.2 Harmônico esférico ... 66
4.3.3 Série de Taylor ... 67
4.3.4 Polinômio de quarta ordem ... 68
4.3.5 Modelo de Klobuchar ... 69
5 AJUSTAMENTO DE OBSERVAÇÕES POR MÍNIMOS QUADRADOS ...74
5.1 CONSIDERAÇÕES INICIAIS ...74
5.2 MÉTODO DOS MÍNIMOS QUADRADOS ...75
5.3 AJUSTAMENTO DE OBSERVAÇÕES POR MÍNIMOS QUADRADOS ...78
5.3.1 Método paramétrico com injunção ... 80
6 MODELO REGIONAL DA IONOSFERA (MOD_ION) ...87
6.1 EQUAÇÃO DE OBSERVAÇÃO ...87
6.2 FUNÇÕES DE MAPEAMENTO IMPLEMENTADAS NO MOD_ION ...90
6.3 FUNÇÕES DE MODELAGEM DO ATRASO IONOSFÉRICO VERTICAL DO MOD_ION ...93
6.4 OPÇÕES DE PROCESSAMENTO NO MOD_ION ...95
6.5 MÉTODO DE ESTIMAÇÃO DOS PARÂMETROS DO MOD_ION ...97
7 EXPERIMENTOS E RESULTADOS OBTIDOS ...102
7.1 DADOS GPS DA RBMC SELECIONADOS PARA OS EXPERIMENTOS ...102
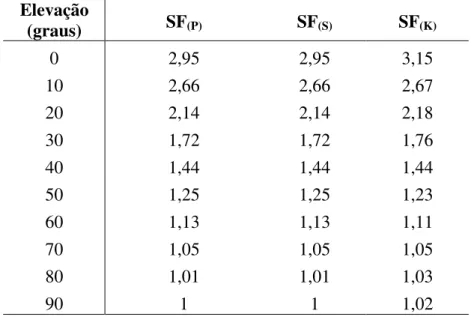
7.2 VALORES DAS FUNÇÕES DE MAPEAMENTO DO MOD_ION ...104
7.3 MODELAGEM E CORREÇÃO DO ATRASO IONOSFÉRICO UTILIZANDO O MOD_ION ....106
7.4 AVALIAÇÃO NO POSICIONAMENTO POR PONTO ...108
7.4.1 Discrepância, desvio padrão e erro médio quadrático ... 110
7.4.2 Análise dos resultados obtidos no posicionamento por ponto ... 110
7.4.2.1 Resultados do primeiro experimento ... 111
7.4.2.2 Resultados do segundo experimento ... 141
8.2 CONCLUSÕES ...153
8.3 RECOMENDAÇÕES ...156
REFERÊNCIAS BIBLIOGRÁFICAS...158
Figura 1.1 – Estações da RBMC ... 22
Figura 2.1 – Estrutura básica dos sinais GPS ... 26
Figura 2.2 – Discrepância horizontal do posicionamento por ponto antes (a) e após a desativação da SA (b) ... 36
Figura 3.1 – Representação esquemática da atmosfera terrestre em condições ideais 40 Figura 3.2 – Representação esquemática da ionosfera ... 43
Figura 3.3 – Imagens da superfície do Sol obtidas em um período de mínima (a) e máxima (b) atividade solar ... 45
Figura 3.4 – Média anual do número de manchas solares – Ciclos Solares ... 46
Figura 3.5 – Regiões geográficas da ionosfera ... 47
Figura 4.1 – Geometria para o atraso do caminho ionosférico ... 63
Figura 4.2 – Representação da ionosfera a partir das mensagens transmitidas ... 70
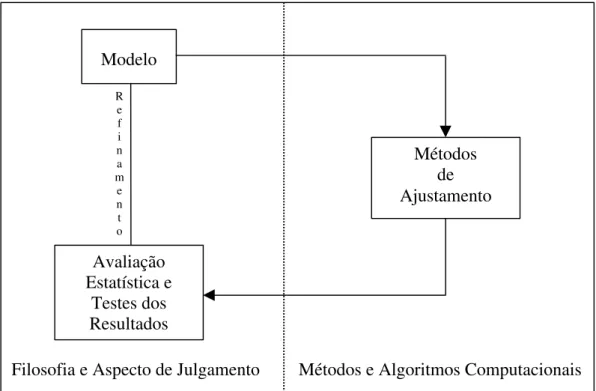
Figura 5.1 – Relação entre as fases do ajustamento ... 79
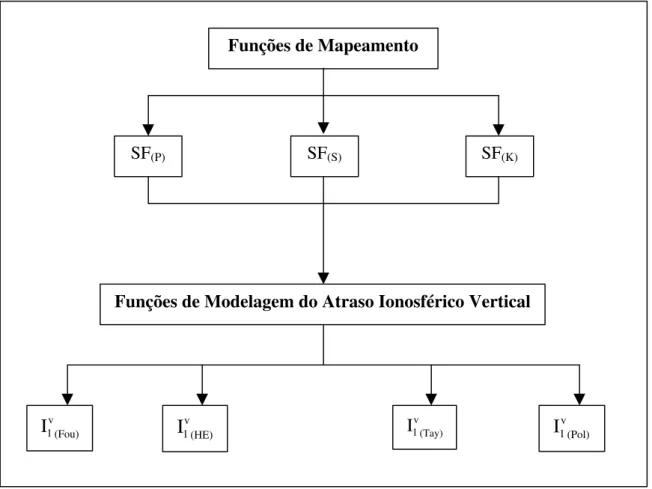
Figura 6.1 – Fluxograma com as funções de mapeamento e de modelagem do atraso ionosférico vertical implementadas no Mod_Ion ... 97
Figura 7.1 – Diferença entre os valores de SF(K) e SF(P) ... 105
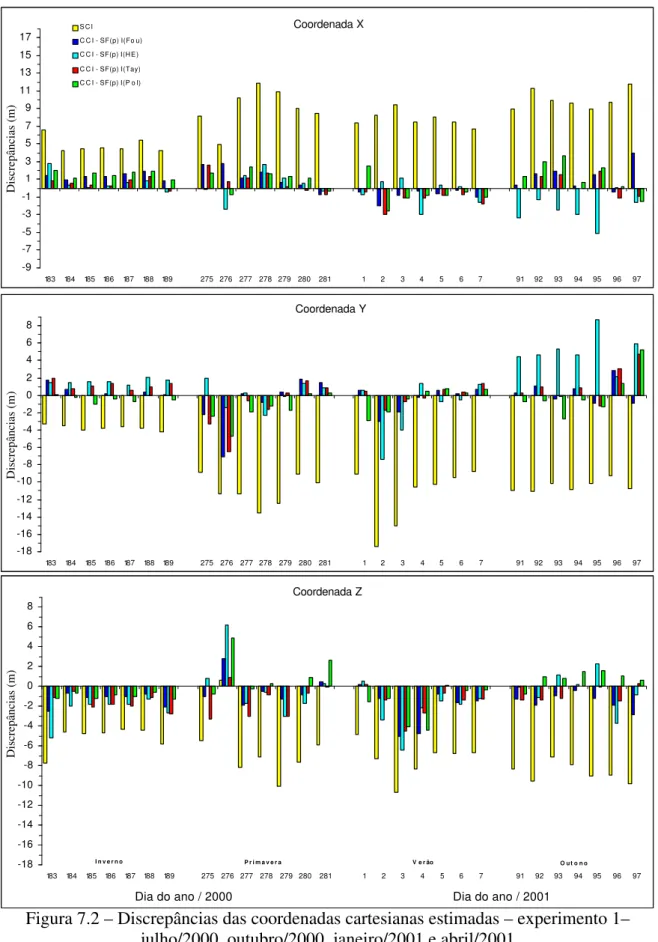
Figura 7.2 – Discrepâncias das coordenadas cartesianas estimadas – experimento 1– julho/2000, outubro/2000, janeiro/2001 e abril/2001 ... 113
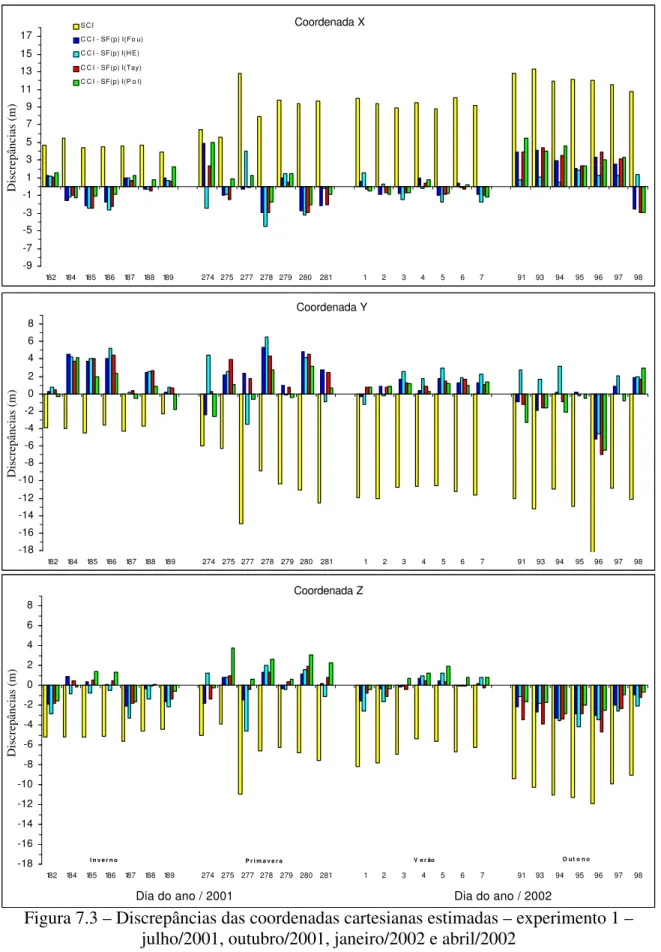
Figura 7.3 – Discrepâncias das coordenadas cartesianas estimadas – experimento 1 – julho/2001, outubro/2001, janeiro/2002 e abril/2002 ... 114
Figura 7.4 – Discrepâncias da resultante das coordenadas cartesianas estimadas (CCI) – experimento 1 – julho/2000, outubro/2000, janeiro/2001 e abril/2001 ... 115
Figura 7.5 – Discrepâncias da resultante das coordenadas cartesianas estimadas (CCI) – experimento 1 – julho/2001, outubro/2001, janeiro/2002 e abril/2002 ... 116
Figura 7.6 – Desvio padrão das coordenadas cartesianas estimadas – experimento 1– julho/2000, outubro/2000, janeiro/2001 e abril/2001 ... 120
Figura 7.9 – EMQ das coordenadas cartesianas estimadas – experimento 1 – julho/2001, outubro/2001, janeiro/2002 e abril/2002 ... 124 Figura 7.10 – EMQ da resultante das coordenadas cartesianas estimadas (CCI) –
experimento 1 – julho/2000, outubro/2000, janeiro/2001 e abril/2001 .... 125 Figura 7.11 – EMQ da resultante das coordenadas cartesianas estimadas (CCI) –
experimento 1 – julho/2001, outubro/2001, janeiro/2002 e abril/2002 .... 126 Figura 7.12 – Discrepâncias em altitude geométrica – experimento 1 – julho/2000,
outubro/2000, janeiro/2001 e abril/2001 ... 129 Figura 7.13 – Discrepâncias em altitude geométrica – experimento 1 – julho/2001,
outubro/2001, janeiro/2002 e abril/2002 ... 130 Figura 7.14 – Discrepâncias em altitude geométrica (CCI) – experimento 1 –
julho/2000, outubro/2000, janeiro/2001 e abril/2001... 131 Figura 7.15 – Discrepâncias em altitude geométrica (CCI) – experimento 1 –
julho/2001, outubro/2001, janeiro/2002 e abril/2002 ... 131 Figura 7.16 – Discrepâncias em altitude geométrica – SCI – Julho/2001 – dia 189 ... 134 Figura 7.17 – Discrepâncias em altitude geométrica – SCI – Abril/2002 – dia 91 ... 134 Figura 7.18 – Discrepâncias em altitude geométrica – CCI-SF(P)I(Fou) – Julho/2001 –
dia 189 ... 135 Figura 7.19 – Discrepâncias em altitude geométrica – CCI-SF(P)I(Fou) – Abril/2002 –
dia 91 ... 135 Figura 7.20 – Discrepâncias em altitude geométrica – CCI-SF(P)I(HE) – Julho/2001 –
dia 189 ... 136 Figura 7.21 – Discrepâncias em altitude geométrica – CCI-SF(P)I(HE) – Abril/2002 –
dia 91 ... 136 Figura 7.22 – Discrepâncias em altitude geométrica – CCI-SF(P)I(Tay) – Julho/2001 –
dia 189 ... 137 Figura 7.23 – Discrepâncias em altitude geométrica – CCI-SF(P)I(Tay) – Abril/2002 –
dia 91 ... 137 Figura 7.24 – Discrepâncias em altitude geométrica – CCI-SF(P)I(Pol) – Julho/2001 –
Figura 7.26 – Discrepâncias das coordenadas cartesianas estimadas – experimento 3 – julho/2000, outubro/2000, janeiro/2001 e abril/2001 ... 146 Figura 7.27 – Discrepâncias das coordenadas cartesianas estimadas – experimento 3 –
Tabela 2.1 – Fontes e efeitos dos erros envolvidos no GPS ... 33
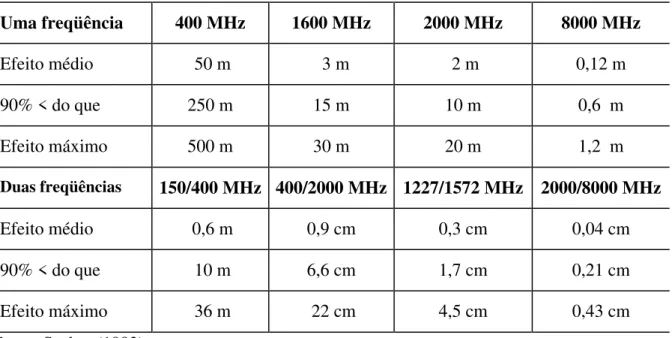
Tabela 4.1 – Efeito da ionosfera em distâncias observadas na vertical com uma freqüência e erros residuais para observações de dupla freqüência ... 60
Tabela 4.2 – Máximo efeito sistemático vertical devido à ionosfera ... 61
Tabela 4.3 – Variação do semi-diâmetro da camada ionosférica ... 64
Tabela 6.1 – Siglas adotadas para as funções de mapeamento ... 91
Tabela 6.2 – Siglas adotadas para as funções de modelagem do Mod_Ion ... 94
Tabela 7.1 – Dados GPS da RBMC disponíveis para o período selecionado ... 103
Tabela 7.2 – Valores das funções de mapeamento do Mod_Ion ... 105
Tabela 7.3 – Média das discrepâncias obtida para cada semana – experimento 1 ... 116
Tabela 7.4 – Valores das discrepâncias da resultante e melhora obtida no experimento 1 ... 118
Tabela 7.5 – Média dos valores de EMQ obtida para cada semana – experimento 1 ... 126
Tabela 7.6 – Valores do EMQ da resultante e melhora obtida no experimento 1 ... 128
Tabela 7.7 – Valores das discrepâncias em altitude geométrica – experimento 1 ... 132
Tabela 7.8 – Valores do EMQ em altitude geométrica – experimento 1 ... 133
Tabela 7.9 – Valores das discrepâncias planimétricas – experimento 1 ... 140
Tabela 7.10 – Valores do EMQ da planimetria – experimento 1 ... 141
Tabela 7.11 – Média das discrepâncias das resultantes – experimento 2 ... 142
Tabela 7.12 – Valores médios do EMQ da resultante – experimento 2 ... 143
Tabela 7.13 – Discrepâncias em altitude geométrica – experimento 2 ... 144
Tabela 7.14 – Valores das discrepâncias (SCI, CCI-Mod_Ion e CCI-Klob) ... 148
AS
BRASION CCI
- Anti Spoofing - BRASil-IONosfera
- Com correção da ionosfera
DGPS - Differential GPS – GPS Diferencial
DoD DOP EMQ
- Departament of Defense - Departamento de Defesa - Dilution of Precision - diluição da precisão
- Erro Médio Quadrático FCT
Fou
- Faculdade de Ciências e Tecnologia - Série de Fourier
GPS - Global Positioning System
GSD GPSPACE HE
- Geodetic Survey Division
- GPS Positioning from ACS Clocks and Ephemerides - Harmônico esférico
IGS ITRF
- International GPS Service
- International Terrestrial Reference Frame LF
LGE
- Freqüência baixa
- Laboratório de Geodésia Espacial
MF - Freqüência média
MMQ Mod_Ion
- Métodos dos Mínimos Quadrados - Modelo Regional da Ionosfera MVC
NAVSTAR
- Matriz variância-covariância
- NAVigation Satellite with Time And Ranging NRCan
Pol
- Natural Resources Canada - Polinômio de Quarta ordem
RBMC - Rede Brasileira de Monitoramento Contínuo
RINEX RTK SA SCI
- Receiver INdependent EXchange - Real Time Kinematic
Tay - Série de Taylor
TEC - Total Electron Content - conteúdo total de elétrons
TECU TU
- Unidade de TEC - Tempo Universal
UNESP - Universidade Estadual Paulista
VHF - Freqüência muito alta
VLF - Freqüência muito baixa
VTEC - Vertical TEC
WADGPS WGS84
- Wide Area DGPS
Programa de Pós-Graduação em Ciências Cartográficas, Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente.
RESUMO
Programa de Pós-Graduação em Ciências Cartográficas, Faculdade de Ciências e Tecnologia, Universidade Estadual Paulista, Presidente Prudente.
ABSTRACT
Nowadays, one of the main drawbacks of the GPS accuracy for L1 users is the ionospheric refraction, which affects, mainly, the point positioning. The error associated with the ionospheric refraction depends on the Total Electron Content (TEC) in the ionospheric layer, that is influenced by several variables, including the solar cycle, the season, the local time, the geographical location of the receiver and the Earth's magnetic field. The broadcast ephemeris contains information for computing the group delay, using the broadcast model. The literatures report that the model correct 50 to 60% of the total effect of ionospheric refraction. Therefore, it is necessary a more effective strategy of eliminating the effects of the ionosphere. Some techniques and models have been developed to estimate these effects using data collected with double frequency GPS receivers. In Brazil, a regional model of the ionosphere (Mod_Ion) was developed in FCT/UNESP, which makes use of GPS data collected at the active stations of RBMC (Brazilian Network for Continuous Monitoring of GPS satellites) In this model, the ionosphere is represented analytically by a Fourier series type. In this research, other modelling and mapping functions of the ionosphere were implemented in Mod_Ion, seeking to improve the efficiency of the model for positioning with L1 receivers. The results of the experiments showed that the functions: Fourier series, Taylor
1 INTRODUÇÃO
1.1 Descrição geral
O NAVSTAR-GPS (NAVigation Satellite with Time And Ranging – Global
Positioning System), ou simplesmente GPS, é um sistema de posicionamento global de
radionavegação, desenvolvido pelo Departamento de Defesa dos Estados Unidos da América
(DoD-Department of Defense), visando ser o principal sistema de navegação das forças
armadas americana. Nos últimos anos, devido à alta acurácia do sistema e do grande
desenvolvimento da tecnologia envolvida nos equipamentos GPS, uma grande comunidade
usuária emergiu nos mais variados segmentos da comunidade civil (navegação,
posicionamento topográfico e geodésico, agricultura, meteorologia, etc.).
O princípio básico de navegação consiste na medida das chamadas
pseudodistâncias entre a antena receptora e no mínimo quatro satélites. Este número mínimo
de satélites permite que se realize posicionamento em tempo real. A necessidade de se ter no
mínimo quatro satélites é para determinar, além das três coordenadas do ponto de interesse, o
não sincronismo entre os relógios do receptor e dos satélites (MONICO, 2000).
O posicionamento utilizando GPS pode ser realizado na forma absoluta
(pontual), relativa ou DGPS (Differential GPS). No posicionamento por ponto (absoluto)
necessita-se de apenas um receptor, e a posição do ponto é determinada em tempo real ou
pós-processada, no sistema de referência vinculado ao GPS, ou seja, o WGS 84 (World Geodetic
System – 84). Este método de posicionamento é muito utilizado em navegação e
levantamentos expeditos. No posicionamento relativo, a posição de um ponto é determinada
com relação à de outro(s), cujas coordenadas são conhecidas. As coordenadas do(s) ponto(s)
conhecido(s) devem estar referenciadas ao WGS 84, ou a um sistema compatível, como o
numa estação de referência onde são calculadas correções (de coordenadas ou de
pseudodistâncias), as quais são transmitidas, em intervalos pré-estabelecidos, para os usuários
da estação de interesse. Aplicando tais correções, melhora-se consideravelmente a qualidade
dos resultados obtidos pelos usuários.
A maior fonte de erros no posicionamento com GPS era a técnica SA
(Selective Availability – Disponibilidade Seletiva), desativada às 04 horas TU de 02 de maio
de 2000. Esta técnica deteriorava as coordenadas e/ou os relógios dos satélites, para usuários
que utilizavam o código C/A (Coarse Acquisition – fácil aquisição) para obter medidas de
pseudodistâncias. Nestas condições, o posicionamento instantâneo de um ponto, apresentava
acurácia horizontal, vertical e de tempo, melhor que 100 m, 140 m e 340 ns, respectivamente,
com 95% de probabilidade. Segundo Shen (2002), após a desativação da SA, a acurácia
horizontal está melhor do que 30 m, ou seja, houve uma melhora maior do que 3,3 vezes.
Testes realizados no Laboratório de Geodésia Espacial (LGE) da FCT/UNESP (Faculdade de
Ciências e Tecnologia/Universidade Estadual Paulista), Campus de Presidente Prudente,
mostraram que após a desativação da SA melhorou-se cerca de 5 vezes a acurácia do
posicionamento com GPS (MATSUOKA et al., 2001).
Com a desativação da técnica SA, a refração ionosférica tornou-se a maior
fonte de erro sistemático no posicionamento com GPS. O erro associado à refração
ionosférica depende do conteúdo total de elétrons (TEC) na camada ionosférica, que por sua
vez, é influenciado por diversas variáveis, tais como: ciclo solar, época do ano, hora do dia,
localização geográfica e atividade geomagnética, e é difícil de ser corrigido (CAMARGO,
1999). Durante a atividade solar máxima e para satélites próximos ao horizonte, o erro pode
ser maior que 100 m (NEWBY e LANGLEY, 1992), devido à redução na velocidade de
Os receptores GPS de dupla freqüência permitem efetuar correções do efeito
da refração ionosférica, devido ao fato do mesmo ser dependente da freqüência do sinal.
Porém, receptores GPS de dupla freqüência são equipamentos caros, fazendo com que os de
uma freqüência (receptores com a portadora L1) sejam amplamente empregados no
posicionamento com GPS.
A desvantagem da utilização dos receptores GPS de uma freqüência é de
que os resultados do levantamento, para o posicionamento por ponto e para a resolução das
ambigüidades no posicionamento relativo de bases médias e longas, são afetados pelo efeito
sistemático devido à ionosfera.
As mensagens de navegação transmitidas pelos satélites do sistema GPS
trazem informações que permitem efetuar correções da ionosfera para receptores GPS de uma
freqüência, utilizando o modelo de Klobuchar (KLOBUCHAR, 1987). Estas informações são
os coeficientes alfa (α) e beta (β) de um polinômio, estimados a partir de uma rede de
estações GPS global. Porém, estudos realizados mostraram que o modelo de Klobuchar pode
remover apenas algo em torno de 50-60% do efeito total (LEICK, 1995). Desta maneira, é
necessário dispor de uma estratégia mais efetiva para eliminar os efeitos da ionosfera, a qual
tem sido investigada a partir do uso de modelos regionais, que representam com maior
eficácia o comportamento da ionosfera da região de estudo.
Estudos sobre o uso do GPS, no sul do Brasil e na região equatorial,
mostraram que, na América Central e na América do Sul, as medidas GPS são afetadas por
diversas condições ionosféricas, como por exemplo, o efeito da cintilação ionosférica e da
anomalia equatorial (WANNINGER et al., 1991, 1992) (CAMPOS et al., 1993). Estas
conclusões foram obtidas dos resultados de duas campanhas GPS, denominadas de
Algumas técnicas e modelos têm sido desenvolvidos para estimar o efeito
sistemático devido à ionosfera. A determinação deste efeito tem sido feita com observações
GPS coletadas com receptores de simples e dupla freqüência. A solução resultante dos dados
de receptores de uma freqüência é limitada, principalmente pela baixa acurácia das medições
das pseudodistâncias (LEICK, 1995). A estimativa do efeito sistemático devido à ionosfera é
baseada, principalmente, em dados obtidos com receptores de dupla freqüência,
proporcionando melhores estimativas do erro sistemático. Nesta direção, pode-se citar o
trabalho desenvolvido por Georgiadiou (1994), no qual se estimam os coeficientes de um
modelo regional da ionosfera com dados GPS de um receptor de dupla freqüência do Sistema
Ativo de Referência GPS da Holanda. Lanyi e Roth (1988) e Coco et al. (1991), também
utilizando uma estação GPS, estimam o TEC, em vez do erro sistemático na portadora L1,
como fez Georgiadiou. Sardón et al. (1994) utilizam diversas estações GPS para este fim.
Vários outros trabalhos podem ser citados, como por exemplo: Komjathy (1997), Schaer
(1999), Fedrizzi (1999), Liao (2000), Fedrizzi et al. (2001), Fonseca Junior (2002), Gao e
Liau (2002), Otsuka et al. (2002), entre outros.
No Brasil, pode-se citar a pesquisa realizada por Camargo (1999) para
modelar a ionosfera, que foi possível devido à disponibilidade de dados GPS da RBMC (Rede
Brasileira de Monitoramento Contínuo). A RBMC, atualmente, possui 15 estações (Figura
1.1) que coletam dados GPS continuamente com receptores de dupla freqüência, sendo que
uma delas está localizada em Presidente Prudente. As estações de Brasília e Fortaleza também
fazem parte da rede IGS (International GPS Service), ocorrendo assim, a integração das redes
Figura 1.1 – Estações da RBMC - situação em fevereiro/2003
Camargo (1999) desenvolveu um modelo (Mod_Ion) que permite calcular o
erro sistemático devido à ionosfera na portadora L1, bem como o TEC, que é representado
pela série do tipo de Fourier, utilizado por Georgiadiou, porém utilizando diversos receptores.
Os parâmetros são estimados a partir de dados GPS de dupla freqüência coletados pelas
estações ativas da RBMC. Com a introdução de diversos receptores foi possível estimar,
também, o erro sistemático devido aos satélites e aos receptores, designados de tendência
interfreqüência dos satélites e dos receptores. Os erros sistemáticos em L1, devidos aos
satélites, transmitidos nas mensagens de navegação, não eram estimados adequadamente. A
partir de abril de 1999, esses valores passaram a ser calculados corretamente (WILSON et al.,
1999). Assim, pode-se incluir as tendências dos satélites como injunções relativas ou
absolutas no Mod_Ion.
O modelo desenvolvido (Mod_Ion) teve sua performance avaliada no
posicionamento por ponto utilizando dados GPS da RBMC do ano de 1998, abrangendo 1
Equador Geográfico -0º
-10º
-20º
semana de cada estação do ano. Os resultados do posicionamento por ponto, com a
pseudodistância, utilizando o modelo para corrigir os efeitos sistemáticos da ionosfera na
portadora L1, para um período de 24 horas, proporcionaram discrepâncias médias na
resultante da ordem de 1,61 m. No posicionamento por ponto sem o uso do modelo, esses
valores alcançaram, em média, 8,44 m. Isto significa uma melhora de 80,7% nos resultados
obtidos utilizando o modelo regional da ionosfera (CAMARGO, 1999 e CAMARGO et al.,
2000).
O Mod_Ion foi avaliado, novamente, no posicionamento por ponto, porém,
durante o período de máxima atividade solar (2000-2001) que ocorre aproximadamente a cada
11 anos e faz com que ocorra um aumento da magnitude do erro devido à refração
ionosférica. Mesmo assim, os experimentos realizados mostraram a potencialidade do
Mod_Ion, proporcionando uma redução do erro na resultante, devido à ionosfera, de 83,1%
(MATSUOKA e CAMARGO, 2002). Nesses experimentos as tendências interfreqüências dos
satélites foram tratadas como injunções absolutas, pois, nessa época, seus valores já eram
transmitidos corretamente nas mensagens de navegação.
Camargo (1999) e Camargo et al. (2000) recomendam a realização de
experimentos utilizando-se outras funções para modelar a ionosfera, bem como, de outras
funções de mapeamento para calcular o efeito ionosférico na direção vertical.
Nesta presente pesquisa foram implementadas e avaliadas outras funções de
modelagem da ionosfera e funções de mapeamento do atraso ionosférico vertical, objetivando
melhorar a eficiência do modelo para o posicionamento com GPS. Entre as funções de
modelagem da ionosfera que foram estudadas podem-se citar o harmônico esférico (KEE e
YUN, 1998), o polinômio de quarta ordem (LIN, 2001), a série de Taylor (SCHAER, 1999) e
1.2 Objetivos
Os principais objetivos desta pesquisa são:
- Investigar, implementar e adaptar algumas funções para modelar o
efeito sistemático da ionosfera, bem como, funções de mapeamento
para calcular o efeito ionosférico na direção vertical;
- Avaliar a performance do modelo na região de Presidente Prudente, a
partir do posicionamento por ponto, no período de máxima atividade
solar (2000-2001);
1.3 Justificativa
Atualmente, a maior fonte de erro sistemático no posicionamento com
receptores GPS de uma freqüência é devida à refração ionosférica, principalmente no período
de máxima atividade solar, no qual, ocorre um aumento da magnitude deste erro. Camargo
(1999) desenvolveu um modelo da ionosfera para aplicação em receptores GPS de uma
freqüência. Em seus experimentos obteve-se ótimos resultados, principalmente no
posicionamento por ponto (CAMARGO, 1999 e CAMARGO et al., 2000).
Porém, recomenda-se com base nos experimentos, que o modelo pode ser
aprimorado, pelo estudo de outras funções de modelagem da ionosfera, bem como de
mapeamento. Além disto, considerando que há disponibilidade de dados coletados com
receptores GPS de dupla freqüência da RBMC, tem-se a oportunidade de avaliar o modelo
desenvolvido e suas modificações num período de máxima atividade solar, que ocorre em
1.4 Conteúdo do trabalho
O conteúdo desse trabalho está dividido em oito capítulos, de forma a
alcançar os objetivos propostos. No segundo capítulo, é apresentada a revisão bibliográfica
sobre o Sistema GPS, contemplando as características dos sinais, as observáveis, o método de
posicionamento por ponto e os erros envolvidos nas observáveis. No terceiro capítulo,
apresenta-se a definição da atmosfera, sua divisão com relação à propagação dos sinais GPS,
a estrutura da ionosfera e as causas das variações do conteúdo total de elétrons (TEC). O
efeito da refração ionosférica na propagação dos sinais GPS e as funções de modelagem e de
mapeamento da ionosfera são apresentadas no quarto capítulo. No quinto capítulo é
apresentado o ajustamento pelo método dos mínimos quadrados. O modelo regional da
ionosfera (Mod_Ion) é apresentado no sexto capítulo, contemplando a modelagem matemática
envolvida e as novas funções de modelagem e de mapeamento que foram implementadas. No
sétimo capítulo são descritos os experimentos, os resultados obtidos e as diversas análises que
foram realizadas nesta pesquisa. Por fim, no capítulo oitavo são apresentadas as considerações
2 SISTEMA DE POSICIONAMENTO GLOBAL
2.1 Características dos sinais GPS
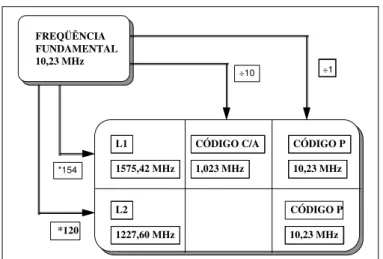
Cada satélite GPS transmite duas ondas portadoras na banda L do espectro,
que permitem operações em quaisquer condições de tempo, denominadas de L1 e L2. Elas são
geradas através da multiplicação eletrônica da freqüência fundamental (f0) de 10,23 MHz que
é produzida por osciladores altamente estáveis (relógios atômicos de césio e rubídio), com
estabilidade entre 10-12 e 10-13 segundos. A figura 2.1 mostra, de forma simplificada, como
são obtidos os sinais emitidos pelos satélites GPS e os códigos modulados nas portadoras L1 e
L2.
FREQÜÊNCIA FUNDAMENTAL 10,23 MHz
*120 L1 1575,42 MHz
CÓDIGO C/A 1,023 MHz
CÓDIGO P 10,23 MHz
L2 1227,60 MHz
CÓDIGO P 10,23 MHz
÷10 ÷1
*154
Figura 2.1 – Estrutura básica dos sinais GPS. Fonte: Adaptada de Monico (2000).
As portadoras L1 e L2, têm suas freqüências derivadas pela multiplicação da
freqüência fundamental por 154 e 120, respectivamente, ou seja:
f1 = 154 x f0 = 1575,42 MHz, (2.1)
f2 = 120 x f0 = 1227,60 MHz, (2.2)
cujos comprimentos de onda são, respectivamente:
λ1 ≅ 19,04 cm, (2.3)
e
λ2 ≅ 24,45 cm. (2.4)
A portadora L1 é modulada em fase com os dois códigos (C/A e P) e com as
mensagens de navegação. Já a portadora L2 é modulada apenas pelo código P, juntamente
com as mensagens de navegação.
A freqüência do código C/A (fC/A = 1,023 MHz) corresponde a 10% da
freqüência fundamental, e a freqüência do código P (fP = 10,23 MHz) é coincidente com a da
freqüência fundamental. Logo, para os códigos C/A e P, se obtém, respectivamente, os
comprimentos de onda da ordem de 293,1 m e 29,31 m.
Os dois códigos binários (C/A e P) são gerados por algoritmos, que, de
forma pseudo-aleatória, fazem com que seus valores resultem numa seqüência de (+1) e (-1).
Somente usuários autorizados têm acesso aos códigos P quando o AS (
Anti-Spoofing) está ativado. O AS refere-se à não permissão de acesso ao código P, através da
aplicação de criptografia, resultando num código protegido, denominado de Y. O código Y é
resultante de uma combinação dos códigos P e W. Este último é gerado numa razão de 50 bps,
ao passo que o P apresenta uma razão de 10,23 x 106 bps (MONICO, 2000). O AS foi
implementado em 31 de janeiro de 1994, em todos os satélites do Bloco II, e pode ser ativado
2.2 Observáveis GPS
Das observáveis obtidas, a partir de informações dos sinais transmitidos
pelos satélites GPS, pode-se identificar quatro tipos (SEEBER, 1993):
- medições de pseudodistâncias, a partir do código;
- diferenças de pseudodistâncias, a partir da contagem integrada Doppler;
- fase da onda portadora ou diferença da fase da onda portadora; e
- diferenças do tempo de viagem do sinal, a partir das medições
interferométricas.
Destes quatro tipos de observáveis GPS, duas são mais importantes e
utilizadas em posicionamento: a pseudodistância e a fase de batimento da onda portadora,
também referida como fase da onda portadora ou simplesmente fase da portadora. Na
seqüência serão descritas essas duas observáveis.
2.2.1 Pseudodistância
A pseudodistância representa a distância medida entre o satélite e a antena
receptora, e pode ser obtida através dos códigos C/A sobre a portadora L1 e/ou com o código
P sobre a portadora L1 e L2. Ela é obtida pela multiplicação do tempo de propagação do sinal
pela velocidade da luz no vácuo. O tempo de propagação do sinal corresponde ao tempo de
deslocamento necessário para a máxima correlação da seqüência do código emitido pelo
satélite e a réplica gerada pelo receptor.
A técnica de correlação do código é aplicada, para acessar a portadora,
quando o AS não está ativado. Ela é, normalmente, empregada, para acessar a portadora L1,
através do código C/A, e o acesso à portadora L2 é conseguido somente pelos usuários que
L2 tem modulada sobre ela apenas o código P, que está sujeito ao AS, ela só pode ser acessada
por uma das várias técnicas disponíveis para o processamento do sinal, tais como: quadratura
do sinal, correlação cruzada e a técnica denominada P-W (MONICO, 2000). Dependendo do
receptor, pode-se obter uma, duas ou três pseudodistâncias, através dos códigos C/A e P1 em
L1 e do código P2 em L2.
Os relógios dos receptores e dos satélites não são sincronizados entre si e
não coincidem com o sistema de tempo GPS. Devido ao não sincronismo entre os relógios
dos receptores e dos satélites, dos quais derivam os códigos, a quantidade medida difere da
distância geométrica entre o satélite e o receptor, e por isso é denominada pseudodistância.
Além disto, a propagação do sinal, através da troposfera e da ionosfera afeta diretamente a
medida da pseudodistância.
Sem considerar os erros inerentes à obtenção da pseudodistância, num
sistema teórico, ela pode ser dada por (MONICO, 2000):
) t (t c
P s
r s
r = − , (2.5)
onde:
s r
P - representa a pseudodistância entre o satélite (s) e a antena do receptor (r);
c - é a velocidade da luz no vácuo;
tr - é o tempo de recepção do sinal no receptor; e
ts - é o tempo de transmissão do sinal pelo satélite.
Os estados dos relógios do satélite e do receptor, que representam o erro de
sincronismo entre o sistema de tempo GPS (TGPS) e os respectivos relógios, são relacionados
s GPS
T = ts - dts, (2.6)
r GPS
T = tr - dtr , (2.7)
no instante de transmissão e recepção do sinal, respectivamente, onde:
dts - é o erro do relógio do satélite em relação ao tempo GPS no instante ts; e
dtr - é o erro do relógio do receptor em relação ao tempo GPS no instante tr.
Os subscritos e sobrescritos referem-se, respectivamente, as quantidades
relacionadas ao receptor (r) e ao satélite (s).
Assim, depois de algumas operações algébricas com as equações (2.5), (2.6)
e (2.7) obtém-se que:
) dt -(dt c + ) T -(T c P s r s GPS GPS s
r = r , (2.8)
que pode ser reescrita considerando, também, os efeitos da atmosfera, como:
P s r s r s r s r s
r ñ + c(dt - dt ) + I + T + å
P = , (2.9)
onde:
s r
ñ - representa a distância geométrica entre o satélite (s) e a antena do receptor (r);
s r
I - é o erro sistemático, devido à refração ionosférica;
s r
T - é o erro sistemático, devido à refração troposférica; e
P
As coordenadas da antena receptora e do satélite estão implícitas na
distância geométrica s r
ñ dada por:
) Z (Z + ) Y (Y + ) X (X =
ñ 2
r s 2 r s 2
r s s
r − − − , (2.10)
onde:
Xs, Ys, Zs – são as coordenadas cartesianas do satélite (s); e
Xr, Yr, Zr – são as coordenadas cartesianas da antena receptora (r).
2.2.2 Fase da onda portadora
A fase da onda portadora é a observável básica para a maioria dos
levantamentos geodésicos. A medida da fase da portadora é obtida pela diferença entre a fase
do sinal recebido do satélite (ö ) e sua réplica gerada pelo receptor (s r
ö ). Na primeira medida
a observável é a parte fracional de um ciclo. Assim, não se conhece na primeira época de
observação, o número inteiro de ciclos entre o satélite (s) e a antena receptora (r), denominado
de ambigüidade (N ). A partir disso, o receptor realiza a contagem de ciclos inteiros. Isto fazsr
com que a medida da fase da onda portadora seja ambígua, com relação a um número de
ciclos inteiros, envolvidos entre a antena receptora e os satélites na primeira época de
observação. A fase observada ( s
r
ö ) no instante de recepção, na escala de tempo do receptor,
em unidades de ciclos, é dada por (MONICO, 2000):
ö s r r s s
r = ö - ö + N å
onde:
s
ö - é a fase da portadora gerada no satélite s e recebida na estação r no instante de recepção;
r
ö
- é a fase gerada no receptor no instante de recepção;
s r
N - é a ambigüidade da fase; e
ö
å - é o erro da fase da onda portadora.
Uma expressão similar à equação (2.9) em unidades de comprimento e de
forma completa, é apresentada por (CAMARGO, 1999):
φ å + N ë + T + I ) dt (dt c + ñ ëö s r s r s r s r s r s
r = , (2.12)
sendo λ o comprimento da onda do sinal da portadora (L1 ou L2), e os demais termos já
conhecidos.
Devido ao avanço sofrido pela observável fase da onda portadora, ao
atravessar a ionosfera, o efeito deste comporta-se de maneira oposta ao caso da equação da
pseudodistância, que por sua vez, sofre um retardo. Tal fato fica evidenciado pelo sinal
negativo do erro sistemático ( s r
I ) devido à ionosfera, pois um avanço na fase provoca uma
diminuição na distância obtida a partir do mesmo.
2.3 Erros envolvidos nas observáveis
As observáveis GPS estão sujeitas aos erros aleatórios, sistemáticos e
grosseiros. Os erros sistemáticos são aqueles cuja causa é conhecida, podendo ser
parametrizados (modelados como termos adicionais) ou reduzidos por técnicas especiais de
uma característica da observação. Por fim, os erros grosseiros são oriundos de falhas humanas
e/ou do equipamento e devem ser eliminados.
Na tabela 2.1 apresentam-se os erros envolvidos no GPS, associados às
respectivas fontes.
Tabela 2.1 – Fontes e efeitos dos erros envolvidos no GPS.
Fonte Erros
Atraso entre as portadoras no hardware do satélite e receptor Erro da órbita
Erro do relógio Satélite
Relatividade Refração Troposférica
Refração Ionosférica Perdas de ciclos Rotação da Terra Propagação do sinal
Multicaminho ou Sinais refletidos Erro do relógio
Erro entre os canais Receptor/Antena
Centro de fase da antena Erro nas coordenadas
Multicaminho Marés terrestres Movimento do Pólo Cargas dos oceanos Estação
Pressão atmosférica
Fonte: Adaptada de Monico (2000).
O tratamento desses erros é de extrema importância na obtenção de
resultados de alta precisão. Muitos deles são praticamente eliminados no posicionamento
relativo ou pela combinação linear entre as portadoras L1 e L2. Outros são reduzidos na
adoção de modelos matemáticos adequados.
Nessa seção, serão descritos brevemente os erros relacionados com a
propagação do sinal na troposfera e o atraso entre as duas portadoras no hardware do satélite
e receptor. Detalhes quanto às fontes e os efeitos dos erros envolvidos no GPS podem ser
encontrados em Seeber (1993), Leick (1995) e Monico (2000). O erro relacionado à
Na troposfera, a propagação do sinal é influenciada pelo conteúdo do vapor
d’água, da pressão do ar e da temperatura. Para freqüências inferiores a 30 GHz, a refração
troposférica independe da freqüência do sinal transmitido (LEICK, 1995). A minimização do
efeito da refração troposférica é feita por meio de técnicas de processamento, ou por meio de
modelos, como por exemplo, o de Hopfield (SEEBER, 1993) e o de Saastamoinen
(SAASTAMOINEN, 1973).
O erro devido ao atraso entre as duas portadoras no hardware do satélite e
do receptor é decorrente da diferença entre os caminhos percorridos pelas portadoras L1 e L2,
através dos dispositivos do satélite e do receptor (MONICO, 2000). Na calibração, durante a
fase de testes dos satélites, a magnitude do atraso é determinada, multiplicada por um fator e
introduzida como parte das mensagens de navegação (WILSON et al., 1999).
2.4 Posicionamento com GPS
Posicionamento pode ser definido como a determinação da posição de
objetos, parado ou em movimento, na superfície terrestre ou próxima a ela, com relação a um
referencial específico. O posicionamento com GPS pode ser realizado utilizando-se de vários
métodos, os quais podem ser classificados como:
- Posicionamento absoluto ou pontual;
- Posicionamento relativo; e
- Posicionamento diferencial – DGPS (Differential GPS).
No posicionamento absoluto ou por ponto, as coordenadas estão associadas
diretamente ao geocentro, sendo necessário apenas um receptor para a determinação das
coordenadas do ponto, e é muito utilizado em navegação e levantamentos expeditos. No
apenas um, e dispor de dados obtidos de uma ou mais estações de referência dos Sistemas de
Controle Ativos (SCA), como por exemplo, no Brasil, a RBMC. Neste método a posição de
um ponto é determinada em relação à de outro(s), cujas coordenadas são conhecidas. O
posicionamento relativo pode ser realizado em tempo real, sendo que para isso é necessário
que os dados coletados na estação de referência sejam transmitidos para a estação móvel via
um link de rádio (MONICO, 2000). O nome dado a esse método é RTK (Real Time
Kinematic).
O DGPS foi desenvolvido visando reduzir os efeitos da SA imposta ao GPS
no modo absoluto. É uma técnica que não só melhora a acurácia, mas também a integridade
do GPS (MONICO, 2000). Estando a estação base localizada nas proximidades da região de
interesse, há uma forte correlação entre os erros calculados na estação base e os erros da
estação móvel. Desta forma, se o usuário receber tais correções, como por exemplo, via link
de rádio, ele poderá corrigir suas posições ou observações coletadas, dependendo da estratégia
adotada.
No DGPS as correções deterioram-se com o afastamento em relação à
estação base. Para eliminar essa deficiência, desenvolveu-se o WADGPS (Wide Area DGPS),
que envolve uma rede de estações base (MONICO, 2000). Na composição de um sistema de
WADGPS, fazem parte pelo menos uma estação monitora, estações de referência, e sistema
de comunicação. Cada estação de referência é equipada com oscilador e receptor GPS de alta
qualidade. As medidas coletadas em cada estação de referência são enviadas para a estação
monitora, a qual estima e analisa as componentes do vetor de correções, e as transmitem para
os usuários via um sistema de comunicação conveniente, como, por exemplo, satélites de
comunicação geoestacionários, redes FM (redes que utilizam a faixa de freqüência FM), etc
Devido à utilização do método de posicionamento por ponto no presente
trabalho, uma descrição mais detalhada é apresentada no próximo tópico.
2.4.1 Posicionamento por ponto
Neste método necessita-se de apenas um receptor e a determinação das
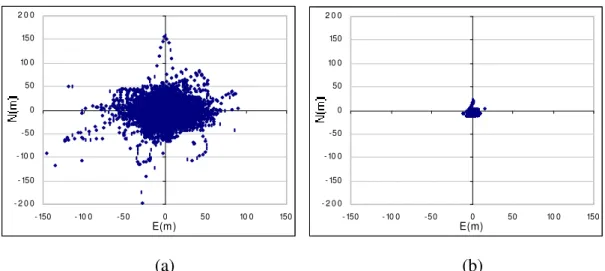
posições pode ser feita, tanto em tempo real, como pós-processada. O posicionamento em
tempo real de um ponto utilizando a pseudodistância derivada do código C/A presente na
portadora L1, proporcionava acurácia planimétrica melhor do que 100 m e altimétrica melhor
que 140 m, 95% do tempo, quando a técnica SA encontrava-se ativada. Com a desativação da
SA, às 04 horas TU de 2 de maio de 2000, a qualidade citada anteriormente melhorou algo em
torno de 5 vezes (MATSUOKA et al., 2001). A melhora pode ser observada nas figuras 2.2
(a) e (b), que mostram a discrepância de dois posicionamentos, um antes e outro depois da
eliminação da SA.
- 2 0 0 -150 -10 0 -50 0 50 10 0 150 2 0 0
-150 -10 0 -50 0 50 10 0 150 E(m)
- 2 0 0 -150 -10 0 -50 0 50 10 0 150 2 0 0
-150 -10 0 -50 0 50 10 0 150 E(m)
(a) (b)
Figura 2.2 – Discrepância horizontal do posicionamento por ponto antes (a) e após a desativação da SA (b). Fonte: Matsuoka et al. (2001)
Deve ser salientado que, mesmo com uma prolongada ocupação, sobre um
determinado ponto, não ocorre uma melhora significativa dos resultados, devido aos vários
No posicionamento por ponto convencional, quando disponível a fase da
onda portadora, a mesma pode ser incluída no processamento juntamente com a
pseudodistância. Entretanto, tal procedimento não tem sido uma prática comum nesse tipo de
posicionamento, pois para uma única época, não proporciona refinamento da solução. Dessa
forma, esse método não atende os requisitos de precisão intrínseca ao posicionamento
geodésico (MONICO, 2000).
Vários erros estão envolvidos no posicionamento por ponto, tais como, erros
das coordenadas e dos relógios dos satélites, da refração ionosférica e troposférica, entre
outros.
Quando as observações são pós-processadas, se torna possível a utilização
das efemérides precisas e das correções dos relógios dos satélites produzidos pelo IGS, de
algum modelo, se disponível, para correções do efeito da ionosfera e troposfera, etc. Com
3 IONOSFERA
Neste capítulo serão apresentadas a divisão da atmosfera com relação à
propagação dos sinais GPS, a estrutura da ionosfera e as causas das variações do conteúdo
total de elétrons (TEC) na camada ionosférica.
3.1 Divisão da atmosfera
A atmosfera terrestre, para propósitos práticos, pode ser considerada como
um conjunto de camadas de gases, esféricas e concêntricas a Terra. A sua estrutura está
relacionada com diversos elementos, tais como: térmicos, químicos e eletromagnéticos. Estes
parâmetros combinados variam sensivelmente em função da hora, latitude, longitude, época
do ano e atividade solar.
A atmosfera terrestre pode ser dividida quanto à propagação dos sinais GPS
em troposfera e ionosfera, pois, as ondas eletromagnéticas ao propagarem em tais meios
sofrem diferentes influências. A troposfera é a camada compreendida entre a superfície
terrestre até aproximadamente 50 km de altura. Ela é formada por partículas neutras e a maior
concentração de gases encontra-se até uma altura de 12 km, composta por nitrogênio,
oxigênio, dióxido de carbono, argônio, vapor d’água, entre outros (SAPUCCI, 2001). A
propagação do sinal na troposfera depende principalmente do conteúdo do vapor d’água, da
pressão do ar e da temperatura. Neste caso, a refração independe da freqüência do sinal
transmitido, desde que a mesma seja abaixo de 30 GHz (LEICK, 1995). A ionosfera se
caracteriza, principalmente, pela formação de íons e elétrons, e inicia-se por volta de 50 km e
estende-se até, aproximadamente, 1000 km de altura. Na realidade, a fronteira superior da
ionosfera não é bem definida, pois, a mesma pode ser interpretada como uma zona de
km onde a densidade atmosférica neutra é muito pequena e os íons positivos são
predominantemente prótons; na altura de aproximadamente 30000 km, a plasmasfera diminui
formando a plasmaspausa que vem a ser a fronteira entre a plasmasfera e a magnetosfera
(DAVIES, 1990).
Na região compreendida pela ionosfera, a densidade de íons e elétrons é
suficiente para alterar a propagação de ondas eletromagnéticas que depende da freqüência. O
principal processo de formação de íons na ionosfera é devido à absorção de radiação solar na
faixa espectral do extremo ultravioleta (EUV) e dos raios X (KIRCHHOFF, 1991).
De forma simplificada, é apresentada na figura 3.1, uma representação da
estrutura da atmosfera, em condições ideais, bem como a variação da pressão e temperatura
Figura 3.1 - Representação esquemática da atmosfera terrestre em condições ideais. Fonte: Adaptada de Osório (1992)
3.2 Estrutura da ionosfera
A radiação solar na faixa espectral do extremo ultravioleta (EUV) e dos
raios X, ao incidir sobre a atmosfera neutra produz uma grande quantidade de íons e elétrons
livres, através do processo denominado de fotoionização.
Na medida em que a radiação solar penetra na atmosfera mais densa a
produção de elétrons aumenta até um nível onde a densidade de elétrons é máxima. Abaixo ATMOSFERA
Exosfera
Termosfera
Mesosfera
Estratosfera
Troposfera 600 km
500 km
400 km
Termopausa
300 km
200 km
100 km
Mesopausa
Estratopausa
Tropopausa 95 km
45 km
10 km
Mínimo
Máximo
Temperatura
Pressão (mb)
Camada de ozônio Auroras
Meteoros
Raios cósmicos
relâmpagos
Silvo
10-5
10-3
10 10-1
1
102
deste nível, apesar do aumento na densidade da atmosfera neutra, a produção de elétrons
decresce, pois a maior parte da radiação ionizante já foi absorvida e a taxa de perda
predomina sobre a taxa de produção de elétrons (FEDRIZZI, 1999).
Por conseguinte, devido às diferentes taxas de absorção e aos diferentes
constituintes da atmosfera, distintas camadas ionosféricas são formadas. Desta forma,
considera-se que a ionosfera se divide em três camadas, denominadas por D, E e F, que são
caracterizadas pelas variações da densidade de elétrons e à medida que aumenta a altitude.
Tais camadas ainda se subdividem durante o dia. Historicamente, a primeira camada da
ionosfera que foi descoberta estava numa altura de 100 km da superfície e foi denominada de
camada E, com “E” representando a palavra elétrons (MCNAMARA, 1991).
A camada D, que faz parte da região mais baixa da ionosfera,
compreendendo uma região entre as alturas de 50 e 85 km, tem uma concentração máxima de
elétrons por volta de 80 km de altura, com uma densidade da ordem de 103 elétrons/cm3
(el/cm3). Ela é importante na propagação de ondas, atuando como uma fonte refletora dos
sinais de freqüência baixa (LF) e de freqüência muito baixa (VLF) (DAVIES, 1990).
A camada E tem início e término, aproximadamente, nas alturas de 85 km e
140 km, respectivamente, e a concentração máxima de elétrons atinge um valor aproximado
de 105 el/cm3. Nessa região, surge uma fina camada, designada de esporádica E, oriunda de
variações na densidade de elétrons próximo à região compreendida entre 90 e 130 km
(MCNAMARA, 1991). Tais variações ocorrem devido à magnetosfera, meteoros, e outros
fenômenos físicos. A contribuição da magnetosfera para a formação da esporádica E, se
resume ao fato de que íons e elétrons são transportados pelo campo magnético que se encontra
na magnetosfera, motivando as variações na densidade de elétrons na região onde se encontra
a esporádica. Os meteoros também têm uma contribuição significativa para a formação dessa
de seu trajeto, ocasionando variações na densidade de elétrons. Com respeito à propagação de
ondas, a esporádica reflete ondas de rádio, com freqüência acima de aproximadamente 100
MHz (DAVIES, 1990).
A camada F compreende aproximadamente o intervalo da ionosfera entre as
alturas de 140 km e 1000 km, sendo, ainda, subdividida entre as camadas F1 e F2. A camada
F1 é formada entre as alturas de 140 km e 200 km, e apresenta uma concentração de elétrons
variando de 2,5x105 el/cm3 a 4x105 el/cm3, para ocorrências de manchas solares mínimas e
máximas, respectivamente. Porém, à noite, essa região desaparece (JOHNSON apud
CAMARGO, 1999). Já a camada F2 compreende o intervalo da ionosfera entre as alturas de
200 km até aproximadamente 1000 km, e o pico na densidade de elétrons ocorre entre as
alturas de 300 a 450 km. Valores típicos da densidade de elétrons para regiões de latitudes
médias, às 12:00 horas local, variam entre 2,8x1011 el/m3 e 5,2x1011 el/m3 (KOMJATHY,
1997). A camada F2 apresenta uma característica difusa devido à concentração de elétrons.
Esse fenômeno é chamado de spread F e ocorre principalmente à noite, provocando uma
variação na densidade de elétrons com uma conseqüente cintilação nos sinais de rádio,
estrelas ou outras fontes de rádio do outro lado da ionosfera (JOHNSON apud CAMARGO,
1999). Em contrapartida, essas irregularidades são importantes em propagação de rádios que
utilizam HF (DAVIES, 1990). A divisão da camada F em F1 e F2, é uma conseqüência da alta
ionização, durante o dia, no verão, podendo ainda, ser dividida em mais regiões. Ocorre um
acréscimo na densidade de elétrons de acordo com o aumento da altitude. Após a
concentração máxima de elétrons que ocorre na camada F, a densidade de elétrons decresce,
até fundir-se com o vento solar (CAMARGO, 1999).
A figura 3.2 mostra a distribuição das camadas, bem como a densidade de
Raios Infra Vermelho
F2
F1
D E
NO+ O+ 2
VHF LF
MF HF
NO+
102 103 104 105 106
Figura 3.2 - Representação esquemática da ionosfera. Fonte: Adaptada de Osório (1992)
É importante ressaltar que a ionosfera é um meio dispersivo, ou seja, o
índice de refratividade depende da freqüência do sinal que a atravessa. O estudo da
propagação dos sinais de rádio emitidos pelos satélites do sistema GPS na ionosfera é
complicado, devido à variação da condutividade do meio com a freqüência (CAMARGO,
1999).
IONOSFERA
Satélite
Raios Ultravioleta Raios - X Raios Gama
Raios Luz Visível
O+ H+ He+
Exosfera
Mesosfera
Estratosfera
Troposfera Diurno
Densidade de elétrons / cm3
600 km 600 km
500 km
400 km
300 km
200 km
100 km 95 km
45 km
10 km
3.3 Causas das variações do conteúdo total de elétrons
A densidade de elétrons, que descreve o estado da ionosfera, em função do
fluxo de ionização solar, atividade magnética, ciclos de manchas solares, estação do ano,
localização do usuário, é afetada por variações temporais, variações da radiação solar,
influências da latitude, longitude e campo magnético da Terra, dentre outras anomalias.
3.3.1 Variações temporais
As variações temporais, que compreendem as variações diurnas, sazonais e
ciclos de longos períodos, influenciam diretamente na mudança da densidade de elétrons na
ionosfera. As variações diurnas são provocadas por mudanças que ocorrem em certas regiões
da ionosfera, que desaparecem à noite, devido à recombinação e junção dos elétrons e íons.
A principal razão da existência da variação diurna é devido à iluminação do
Sol, ou seja, à radiação solar. Algumas camadas, como a D, E e F1, chegam a ponto de
desaparecer à noite. A camada F2 não desaparece, mas a quantidade de elétrons é reduzida a
ponto de atingir na madrugada seu valor mínimo, voltando a aumentar seu valor com o nascer
do Sol. Ao longo do dia a densidade de elétrons depende da hora local, sendo que seu valor
máximo ocorre entre as 12:00 e 16:00 horas local (WEBSTER, 1993).
As estações do ano também têm sua influência na variação da densidade de
elétrons, devido à mudança do ângulo zenital do Sol e da intensidade do fluxo de ionização,
caracterizando as variações sazonais.
As variações de ciclos de longos períodos, com ciclos de aproximadamente
11 anos, são associadas às ocorrências de manchas solares, e o aumento de ionização é
proporcional ao número de manchas. As manchas solares foram descritas pela primeira vez
por Teofrasto por volta do ano 325 a.C. (SCHAER, 1999). As manchas solares são regiões
brilhantes que emitem um nível mais alto de radiação ultravioleta. Assim, o aumento da
radiação ultravioleta ocasiona uma mudança na densidade de elétrons na ionosfera. As
manchas solares podem durar alguns dias ou até semanas. A figura 3.3 (a) e (b) mostra duas
imagens da superfície do Sol, caracterizando as suas manchas solares, obtidas em um período
de mínima e máxima atividade solar, respectivamente.
(a) (b)
Figura 3.3 – Imagens da superfície do Sol obtidas em um período de mínima (a) e máxima (b) atividade solar. Fonte: ftp://ftp.noao.edu/kpvt/daily/int/ (10/2002)
Pela figura 3.3 (a) e (b) pode-se verificar a diferença expressiva no número
de manchas solares observadas durante um período de mínima e máxima atividade solar. Se
por um lado praticamente não se observam as manchas solares (figura 3.3 (a)), em
contrapartida, na figura 3.3 (b) observa-se a presença numerosa das mesmas.
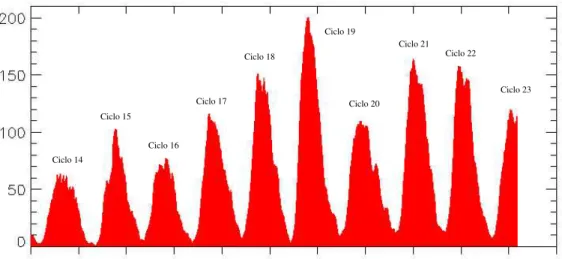
Atualmente a ionosfera está no ciclo denominado “ciclo 23” (KUNCHES,
2000), e o período de maior atividade solar compreendeu os anos de 2000 e 2001, o que
ocasionou um aumento do número de manchas solares e, conseqüentemente, do número de
elétrons presentes na camada ionosférica. A figura 3.4 mostra os mais recentes ciclos solares,
Figura 3.4 – Média anual do número de manchas solares – Ciclos Solares. Fonte : http://sidc.oma.be (02/2003)
Os ciclos solares são normalmente não-simétricos (LEICK, 1995). A
duração da transição do período mínimo para o máximo é menor do que a duração do máximo
para o mínimo. Na figura 3.4, observa-se que o ciclo 19 foi o que apresentou o maior registro
de manchas solares. Com relação ao ciclo 23, verifica-se que o período de máxima atividade
ocorreu entre os anos 2000 e 2001, aproximadamente. Atualmente, inicia-se o declínio do
número de manchas solares, embora, ainda bastante expressiva.
3.3.2 Influência da variação da radiação solar
Sendo a radiação solar a principal responsável pela formação da ionosfera,
sua variação também influenciará na variação da densidade de elétrons. Existem três tipos de
fenômenos associados à variação da radiação solar. O primeiro é conhecido por distúrbio
súbito ionosférico, e é associado às explosões solares. Sua causa é devido ao rápido aumento
de energia na superfície do Sol, emitida na forma de raio-X e ultravioleta.
A variação da radiação associada aos buracos na coroa dá origem ao
segundo fenômeno. Esses buracos são fontes das correntes do vento solar de alta velocidade, e Ciclo 14
Ciclo 15
Ciclo 16 Ciclo 17
Ciclo 18
Ciclo 19
Ciclo 20 Ciclo 21
Ciclo 22
são mais comuns no período de declínio da atividade solar e causam as tempestades
ionosféricas (KIRCHHOFF, 1991).
Quando a variação da radiação solar estiver relacionado às manchas solares,
tem-se o terceiro fenômeno, que foi descrito na seção anterior.
3.3.3 Regiões geográficas da ionosfera
A estrutura global da ionosfera não é homogênea. Ela muda com a latitude,
devido à variação do ângulo zenital do Sol, que influencia, diretamente, no nível de radiação
solar. Como exemplo, tem-se que as regiões equatoriais são caracterizadas por um alto nível
de densidade de elétrons. Já as regiões de latitudes médias são consideradas relativamente
livres das anomalias ionosféricas, enquanto as regiões polares não são muito previsíveis
(WEBSTER, 1993). A influência da longitude, devido à não coincidência dos pólos
geográficos e magnéticos, é sensível somente nas regiões mais altas. A figura 3.5 mostra a
localização das três maiores regiões geográficas da ionosfera (FONSECA JUNIOR, 2002).
Figura 3.5 – Regiões geográficas da ionosfera. Fonte: Adaptada de Fonseca Junior (2002)
Região Polar
Latitudes Médias
Região Equatorial
Latitudes Médias
Pela figura 3.5 observa-se que a região polar está delimitada entre ± (60º a
90º), a região de latitudes médias entre ± (20º a 60º) e a região equatorial limita-se entre –20º
a +20º, aproximadamente, do equador geomagnético.
3.3.4 Campo magnético terrestre
Próximo à superfície da Terra, o campo geomagnético pode ser aproximado
a um dipolo não coincidente com o eixo de rotação (FONSECA JUNIOR, 2002). Acredita-se
que o campo geomagnético origina-se no centro da Terra e as linhas de força magnéticas
estendem-se a grandes distâncias da Terra, atingindo 10 raios terrestres no lado de frente ao
Sol (KIRCHHOFF, 1991).
O campo magnético da Terra exerce grande influência na variação da
densidade de elétrons. Na ionosfera e na magnetosfera, o campo magnético controla o
movimento das partículas ionizadas e, portanto, qualquer perturbação no campo magnético
resultará em modificações nas condições de transporte do meio ionizado (KIRCHHOFF,
1991). As variações mais comuns observadas no campo magnético são aquelas produzidas
através das correntes elétricas que fluem na parte inferior da ionosfera. Além destas, podem
ocorrer variações bruscas e muito intensas, provocadas pelas tempestades solares
(KIRCHHOFF, 1991).
Os distúrbios geomagnéticos são monitorados a partir de estações em terra,
instaladas em observatórios magnéticos (KOMJATHY, 1997).
3.3.5 Cintilação
Irregularidades na ionosfera da Terra podem produzir variações de curtos
devido aos efeitos da difração e refração, que causam um enfraquecimento no sinal recebido
pelos receptores GPS, fazendo com que ocorra a perda do sinal. Essas rápidas flutuações são
chamadas de cintilação, e são análogas à refração atmosférica das estrelas (WEBSTER, 1993)
e provocam irregularidades no TEC.
O processo físico básico do surgimento das irregularidades na ionosfera é
referido como Instabilidade de Rayleigh–Taylor (KNIGHT e FINN, 1996). Este processo tem
início após o pôr do Sol, onde a densidade do plasma nas regiões mais baixas da ionosfera
decresce com a recombinação dos íons. Ao mesmo tempo, há um movimento ascendente para
as camadas superiores como resultado de forças eletromagnéticas. Isto faz com que os
gradientes da densidade no plasma fiquem maiores, que, por sua vez, conduz à formação de
irregularidades que aumentam de uma maneira instável.
Os efeitos mais intensos da cintilação ionosférica ocorrem na faixa de +30º
a –30º de latitude, sendo que os eventos de maior intensidade ocorrem na zona entre +10º e –
10º de latitude a partir da linha do equador geomagnético (FONSECA JUNIOR, 2002). Há
eventos de cintilação, também, nas regiões onde ocorrem as auroras (65º até 75º de latitude
geomagnética), e na região que envolve a capa polar (latitudes geomagnéticas maiores que
75º). Cintilações que ocorrem nas regiões de altas latitudes (região auroral) e na região
equatorial surgem de distintos fenômenos físicos. Na região auroral, a ocorrência da cintilação
é devida às tempestades geomagnéticas ou magnetosféricas. No caso da região equatorial, a
cintilação esta relacionada com a anomalia equatorial (SKONE, 2000).
No Brasil, as ocorrências de cintilações são mínimas, de abril até agosto, e
máximas, de setembro a março. Os horários de cintilação mais intensos são limitados à uma
hora, após o pôr do Sol, até aproximadamente à meia noite local (CAMPOS et al., 1993).
A cintilação ionosférica tem o potencial de afetar todos os serviços GPS,
(PPS), no rastreamento com receptores de simples e dupla freqüência, tanto no
posicionamento por ponto como no relativo (FU et al., 1999).
3.3.6 Outras anomalias
Além das irregularidades que ocorrem na região E, designadas de
esporádica E (Es), têm-se as anomalias que ocorrem nas regiões equatorial e polar. Na região
equatorial, a densidade de elétrons da ionosfera é influenciada pelo alto nível de radiação
solar e pelos campos magnético e elétrico da Terra. Isto faz com que os elétrons se movam ao
longo das linhas de forças horizontais do campo geomagnético para longe do equador. Essa
anomalia é chamada de efeito fonte (fountain effect) (WEBSTER, 1993). O efeito fonte causa
uma alta concentração de elétrons no equador, conhecido por anomalia equatorial ou anomalia
de Appleton. Esta anomalia consiste em duas faixas de alta densidade do plasma ionosférico,
localizadas nas regiões tropicais que circulam paralelamente ao equador geomagnético. Nas
faixas da anomalia que se localizam no território brasileiro, as densidades da ionosfera
atingem valores maiores que em outras regiões da Terra. A maior intensidade desta anomalia
ocorre nas latitudes geomagnéticas entre ± 10 e ± 20 graus, causando alta concentração de
elétrons nos dois lados do equador geomagnético.
Um fenômeno associado à região polar, denominado de aurora boreal, é
conseqüência dos anéis de alta ionização que surgem ao redor dos pólos magnéticos. Durante
4 EFEITO DA IONOSFERA NA PROPAGAÇÃO DOS SINAIS GPS
4.1 Refração ionosférica
Os sinais do GPS, no seu caminho entre o satélite e a antena receptora,
propagam-se na atmosfera dinâmica, atravessando diferentes camadas, que possuem
características bem distintas. Conforme já citado, a troposfera, para freqüências abaixo de 30
GHz, comporta-se como um meio não dispersivo, ou seja, a refração é independente da
freqüência do sinal transmitido, dependendo apenas das propriedades termodinâmicas do ar.
A ionosfera, como um meio dispersivo, afeta a modulação e a fase da portadora, fazendo com
que sofram, respectivamente, um retardo e um avanço (LEICK, 1995). O retardo é referido,
também, como atraso ionosférico e aumenta o comprimento aparente do caminho percorrido
pelo sinal.
Os efeitos da troposfera são normalmente reduzidos por meio de técnicas de
processamento ou determinado diretamente por meio de modelos. Uma vez que não é possível
avaliar a pressão e a temperatura atmosférica ao longo do percurso do sinal, através da
camada neutra, existem vários modelos disponíveis, que corrigem de 92% a 95% desse efeito
(WELLS et al., 1986). Ao contrário, o efeito da ionosfera, que depende da freqüência, e,
conseqüentemente, do índice de refração, é proporcional ao TEC, ou seja, ao número de
elétrons presentes ao longo do caminho entre o satélite e a antena receptora. Se o valor do
TEC fosse constante, os efeitos causados pela ionosfera seriam de fácil determinação. O
problema é que o TEC varia no tempo e no espaço, em razão do fluxo de ionização solar,
atividade magnética, ciclo de manchas solares, estação do ano, localização do usuário e
direção do raio vetor do satélite (CAMARGO, 1999). Essas variações podem fazer com que o
receptor perca a sintonia com o satélite, pelo enfraquecimento do sinal, caso específico do
O afastamento do índice de refração de seu valor unitário, nas diferentes
camadas da ionosfera, faz com que a velocidade da fase da portadora (V ) dada porf
(HOFMANN-WELLENHOF et al., 1993):
f ë
Vf = , (4.1)
sofra um acréscimo. Nessa expressão λ representa o comprimento de onda e f a sua
freqüência.
Para um grupo de ondas, ou seja, para as medidas de código, a propagação
da energia é definida como a velocidade de grupo (Vg) (HOFMANN-WELLENHOF et al.,
1993):
2 g ddf
V λ
λ −
= , (4.2)
e sofre um decréscimo durante a propagação do sinal.
Diferenciando a equação (4.1) em relação a λ:
, df ë dë f
dVf = + (4.3)
e dividindo a equação (4.3) por dëë obtém-se:
, f d dV 1 d
df f
λ − λ λ =
e substituindo a equação (4.4) na equação (4.2):
. f d
dV
V f
g =−λ λ +λ (4.5)
Como a velocidade da fase é igual ao produto fë , pode substituí-la na
equação (4.5), obtendo-se uma expressão que relaciona a velocidade de grupo com a
velocidade de fase, conhecida por equação de Rayleigh:
. d dV V
V f
f
g = −λ λ (4.6)
A propagação de uma onda em um meio depende do índice de refração (n),
e a sua velocidade é dada por:
, n c
V= (4.7)
sendo c a velocidade da luz.
Aplicando a equação (4.7) para a velocidade de fase e de grupo, obtém-se os
mesmos em função do índice de refração e da velocidade da luz no vácuo:
, n
c V
f
f = (4.8)
. n
c V
g
Diferenciando a velocidade da fase (equação (4.8)) com relação ao
comprimento de onda (λ), obtém-se:
, dë dn n c dë dV f 2 f
f =− (4.10)
e substituindo as equações (4.8), (4.9) e (4.10) na equação de Rayleigh obtém-se:
. d dn n c n c n c f 2 f f g λ λ +
= (4.11)
A equação acima também pode ser escrita da seguinte forma:
), d dn n 1 1 ( n 1 n 1 f f f g λ λ +
= (4.12)
e invertendo esta equação, tem-se que:
, ) d dn n 1 1 ( n
n f 1
f f
g = +λ λ − (4.13)
Utilizando a aproximação ( 1+ ε )−1 = 1− ε, onde ε representa um valor
muito pequeno, e analogamente aplicando-a na fórmula acima, obtém-se