UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Um Controlador Dual Subótimo com Fator de
Peso Variável no Tempo
Aderson Jamier Santos Reis
Orientador: Prof. Dr. André Laurindo Maitelli
Tese de Doutorado apresentada ao
Pro-grama de Pós-Graduação em Engenharia Elétrica e de Computação (PPgEEc) da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para ob-tenção do título de Doutor em Ciências.
UFRN / Biblioteca Central Zila Mamede Catalogação da Publicação na Fonte
Reis, Aderson Jamier Santos.
Um controlador dual subótimo com fator de peso variável no tempo / Aderson Jamier Santos Reis. - Natal, RN, 2015.
71 p.
Orientador: Prof. Dr. André Laurindo Maitelli.
Tese (Doutorado) - Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elé-trica e de Computação.
1. Controle adaptativo - Tese. 2. Controle dual - Tese. 3. Controle estocástico - Tese. 4. Sistemas variantes no tempo - Tese. I. Maitelli, André Laurindo. II. Universidade Federal do Rio Grande do Norte. III. Título.
Um Controlador Dual Subótimo com Fator de
Peso Variável no Tempo
Aderson Jamier Santos Reis
Tese de Doutorado aprovada em 12 de Junho de 2015 pela banca examinadora composta pelos seguintes membros:
Prof. Dr. André Laurindo Maitelli (orientador) . . . DCA/UFRN
ProfaDr. Oscar Gabriel Filho . . . PETROBRAS
ProfaDr. Vicente Delgado Moreira, . . . PETROBRAS
Prof. Dr. Carlos Eduardo Trabuco Dorea . . . DCA/UFRN
Agradecimentos
Ao meu orientador, professor Doutor André Maitelli, sou grato pela orientação e confi-ança depositados em minha pessoa.
Aos colegas da sala de pesquisa C do Laboratório de Automação em Petróleo - LAUT, pelas críticas e sugestões.
À minha família, meu pai, minha mãe e minhas duas irmãs, pelo apoio durante toda esta jornada.
Resumo
O presente trabalho insere-se no âmbito dos sistemas de controle duais adaptativos. O controle dual contempla uma solução ótima formulada para um problema na teoria de controle estocástico no qual envolve incertezas e variações de parâmetros no tempo. Este trabalho propõe uma modificação em um controlador dual subótimo para sistemas discretos no tempo. O controlador dual ótimo almeja um balanceamento ótimo que busca, ao mesmo tempo, manter um bom controle e obter pequenos erros de estimativas. O sinal de controle é calculado de maneira a minimizar a variação da saída do sistema com base num valor de referência um passo adiante. A ideia deste controlador dual subótimo é adicionar termos simples na matriz de covariância dos parâmetros estimados dois passos adiante. Um algoritmo adaptativo é utilizado para o ajuste do parâmetro de projeto λ
a cada passo do sistema. O desempenho do controlador proposto é avaliado através do método de simulações Monte Carlo.
Palavras-chave: Controle adaptativo; controle dual; controle estocástico; sistemas
Abstract
This work concerns a refinement of a suboptimal dual controller for discrete time systems with stochastic parameters. The dual property means that the control signal is chosen so that estimation of the model parameters and regulation of the output signals are optimally balanced. The control signal is computed in such a way so as to minimize the variance of output around a reference value one step further, with the addition of terms in the loss function. The idea is add simple terms depending on the covariance matrix of the parameter estimates two steps ahead. An algorithm is used for the adaptive adjustment of the adjustable parameter lambda, for each step of the way. The actual performance of the proposed controller is evaluated through a Monte Carlo simulations method.
Sumário
Figuras iii
Tabelas v
Lista de Símbolos e Abreviaturas vii
1 Introdução 1
1.1 Organização do Texto . . . 5
2 Embasamento Teórico - Controle Adaptativo dual 7 2.1 Introdução . . . 7
2.2 Descrição do Problema . . . 11
2.2.1 O modelo . . . 11
2.2.2 O critério . . . 12
2.2.3 A estimação de parâmetros . . . 12
2.3 Controlador Equivalente à Certeza . . . 13
2.4 Controlador Cauteloso . . . 14
2.5 Conclusão . . . 15
3 Controladores Duais Subótimos 17 3.1 Introdução . . . 17
3.2 Controlador com sinal de perturbação . . . 17
3.3 Controlador com restrições . . . 18
3.4 Controlador dual subótimo ativo . . . 18
3.5 Controlador dual subótimo ativo aproximado . . . 20
3.6 Controlador dual por inovações . . . 22
3.7 Controlador dual por bicritério . . . 22
3.8 Controlador multiestágios usando predição ótima aproximada . . . 23
3.9 Simulações - controladores duais subótimos . . . 25
3.9.1 Sistema de primeira ordem . . . 25
3.9.2 Simulação - controlador equivalente à certeza . . . 26
3.9.3 Simulação - controlador cauteloso . . . 28
3.9.4 Simulação - controlador por restrições . . . 28
3.9.5 Simulação - controlador por inovações . . . 31
3.9.6 Simulação - controlador por bicritério . . . 32
3.9.7 Simulação - Controlador dual subótimo ativo aproximado . . . . 32
3.9.8 Simulação Monte Carlo . . . 35 3.10 Conclusão . . . 35
4 Controlador Proposto 37
4.1 Controlador dual subótimo com fator de pesoλvariável . . . 37 4.2 Avaliação de Resultados . . . 42 4.3 Conclusão . . . 64
5 Conclusão 65
5.1 Trabalhos Publicados . . . 67 5.1.1 WSEAS . . . 67 5.1.2 JCAE . . . 68
Referências bibliográficas 69
Lista de Figuras
2.1 Diagrama de blocos do Regulador Auto-Sintonizável. . . 8
2.2 Diagrama de blocos de um controlador adaptativo por modelo de referência. 8 2.3 Sistema adaptativo de controle dual. . . 9
2.4 Organização das soluções combinadas do problema de identificação e controle. . . 10
3.1 Minimizações da abordagem do controlador dual por bicritério. . . 23
3.2 Simulação de uma realização do controlador equivalente à certeza. . . 27
3.3 Simulação de uma realização do controlador cauteloso. . . 29
3.4 Simulação de uma realização do controlador por restrições. . . 30
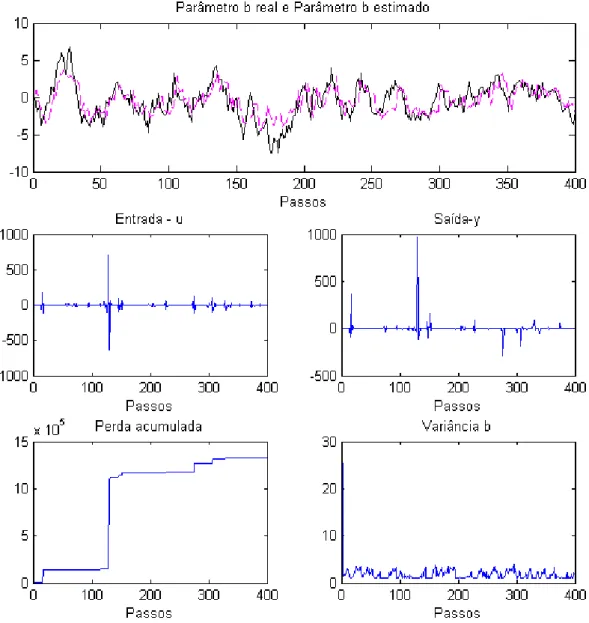
3.5 Simulação de uma realização do controlador dual subótimo por inovações. 31 3.6 Simulação de uma realização do controlador por bicritério. . . 33
3.7 Simulação de uma realização do controlador aproximado subótimo dual ativo. . . 34
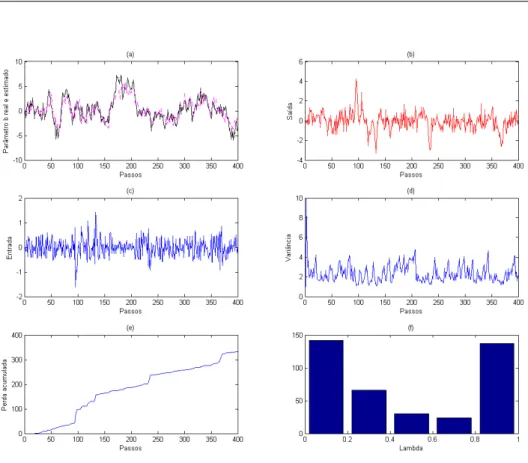
4.1 Realização típica do Exemplo 1 usando λ variável, contendo entrada, saída, perda acumulada, vetor lambda, parâmetro b real e estimado e va-riância de b. . . 47
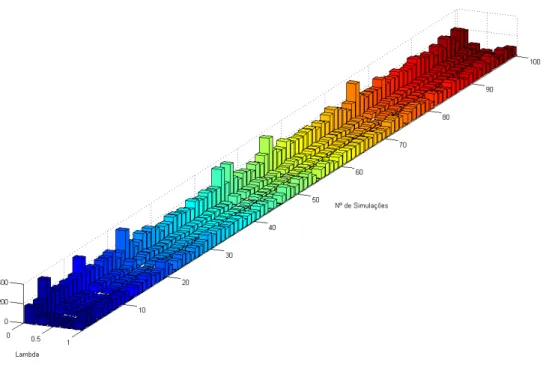
4.2 Mapa 3D do vetor lambda com 100 simulações - Exemplo 1. . . 48
4.3 Sinal de entrada e sinal de saída de uma realização típica do sistema no Exemplo 1. . . 49
4.4 Realização típica do Exemplo 2 contendo entrada, saída, perda acumu-lada, vetor lambda, parâmetro b real e estimado e variância de b. . . 51
4.5 Mapa 3D do vetor lambda com 100 simulações - exemplo 2. . . 52
4.6 Saída acumulada e variância de b de uma realização típica do sistema no Exemplo 2. . . 53
4.7 Realização típica do Exemplo 3 contendo entrada, saída, saída acumu-lada, vetor lambda, parâmetro b real e estimado e variância de b. . . 54
4.8 Mapa 3D do vetor lambda com 100 simulações - Exemplo 3. . . 55
4.9 Sinal de controle e sinal de saída de uma realização típica do sistema no Exemplo 3. . . 56
4.10 Realização típica do Exemplo 4 contendo entrada, saída, perda acumu-lada, vetor lambda, parâmetro b real e estimado e variância de b. . . 58
4.11 Sinal de entrada e sinal de saída de uma realização típica do sistema no exemplo 4. . . 59
4.12 Mapa 3D do vetor lambda com 100 simulações - Exemplo 4. . . 59
4.13 Realização típica do Exemplo 5 contendo entrada, saída, perda acumu-lada, vetor lambda, parâmetro b real e estimado e variância de b. . . 61 4.14 Sinal de entrada e parâmetro b real e estimado de uma realização típica
do sistema no Exemplo 6. . . 63 4.15 Realização típica do Exemplo 6 contendo entrada, saída, saída
acumu-lada, vetor lambda, parâmetro b real e estimado e variância de b. . . 63 4.16 Mapa 3D do vetor lambda com 100 simulações - Exemplo 6. . . 64 5.1 Página resumo do trabalho aceito no periódico WSEAS - Transactions on
Systems and Control . . . 67 5.2 Página resumo do trabalho aceito no periódico JCAE - Journal of Control,
Automation and Electrical Systems . . . 68
Lista de Tabelas
3.1 Os resultados da simulação de Monte Carlo para o sistema 3.30. . . 35
4.1 Resultados da simulação - Exemplo 1. . . 47
4.2 Comparação pareada entre controladores - Exemplo 1. . . 47
4.3 Resultados da simulação - Exemplo 2. . . 50
4.4 Comparação pareada entre controladores - Exemplo 2. . . 50
4.5 Resultados da simulação - Exemplo 3. . . 53
4.6 Comparação pareada entre controladores - Exemplo 3. . . 54
4.7 Resultados da simulação - Exemplo 4. . . 57
4.8 Comparação pareada entre controladores - Exemplo 4. . . 57
4.9 Resultados da simulação - Exemplo 5. . . 60
4.10 Comparação pareada entre controladores - Exemplo 5. . . 60
4.11 Resultados da simulação - Exemplo 6. . . 62
4.12 Comparação pareada entre controladores - Exemplo 6. . . 62
Lista de Símbolos e Abreviaturas
¯
V Perda média por passo
λ Peso ajustável dos controladores duais subótimos σ Desvio padrão do ruído de medida e
θ(k) Vetor de entrada e saídas passadas até o instante ’k’
ARX AutoRegressive with eXternal input ASOD Active Suboptimal Dual
BDC Bicriterion dual controller
Ck Matriz de covariância do ruído de parâmetros
CE Equivalência à Certeza
e(k) Ruído de medida no instante ’k’
IDC Innovations Dual Controller
JN Função de Custo do sistema de N estágios
MRAC Controlador Adaptativo por Modelo de Referência P(b) Valor médio da variância de parâmetros
P(k) Matriz de covariância do erro de estimação no instante t
PRBS Pseudo-random binary sequences
sgn Função que obtém o sinal do valor numérico ST R Regulador Auto-Sintonizável
u(k) Sinal de controle do sistema no instante ’k’
uca Controlador cauteloso
uce Controlador equivalente à certeza
uperturb Controlador com sinal de perturbação
v(k) Vetor de ruído do parâmetro
x(k) Vetor de parâmetros do sistema no instante ’k’
y(k) Saída do sistema no instante ’k’
ˆ
θ(k) Vetorθcom o sinal de controleu(k−1)substituído por zero
ˆ
RMS Índice de desempenho do controlador
Capítulo 1
Introdução
Em todos os sistemas de controle existem determinados graus de incerteza com res-peito ao processo a ser controlado. A estrutura e/ou os parâmetros do processo podem se modificar de maneira desconhecida. Existem diversas maneiras de lidar com os tipos de incertezas no processo. O sistema de realimentação em malha fechada já representa, de certo modo, uma ação contra as variações do processo. O projeto de controladores robustos com parâmetros fixos também pode ser uma alternativa contra as variações no processo. Um outro caminho para lidar com as incertezas é utilizar o controle adaptativo. O controle adaptativo é uma estratégia de controle que utiliza as medições da entrada e saída da planta para se adaptar às variações paramétricas e perturbações da planta. Wit-tenmark (1995) define o controle adaptativo como um controlador que pode modificar seu comportamento em resposta às mudanças na dinâmica do processo e em resposta ao caráter dos distúrbios. Existem diferentes tipos de controladores adaptativos de acordo com as informações do processo que são utilizadas bem como de acordo com a maneira como são manuseadas.
Para obter boas informações da planta é necessário perturbar o processo. Normal-mente, de acordo com o nível de perturbação no sistema uma melhor qualidade das in-formações do processo são obtidas. Por outro lado, as especificações do controlador em malha fechada são tais que a saída do sistema deve variar o mínimo possível. Sendo assim, existe um conflito de interesses entre a coleta de informações do processo e a qualidade do controle.
Algumas vezes é necessário controlar sistemas com parâmetros desconhecidos e va-riantes no tempo. Para realizar o controle desses sistemas é desejável um controlador adaptativo. Na maioria dos casos, os controladores adaptativos tratam da estimação e do controle separadamente. Feldbaum (1960-61), entretanto, introduziu e discutiu em uma série de quatro trabalhos uma nova abordagem para o sinal de controle adaptativo. Nesses trabalhos, o autor apresentou duas propriedades que o sinal de controle ótimo adaptativo deve assegurar: (i) a saída do sistema cautelosamente seguir o valor de referência de-sejado, e (ii) excitar a planta suficientemente para acelerar o processo de estimação de parâmetros. Assim, este tipo de controlador possui duas metas. Este compromisso entre controlar e excitar a planta resultou no conceito de controle dual.
2 CAPÍTULO 1. INTRODUÇÃO
quando o horizonte de tempo for pequeno e quando as estimativas iniciais forem ruins. Alguns artigos sugerem que os sistemas no setor da economia são uma área com bastante potencial para a aplicação dos controladores duais. Outra situação para a utilização do controle dual é quando os parâmetros do processo variam muito rapidamente e/ou o ganho alterna o seu sinal; essa é uma situação em que o processo possui uma não-linearidade e é desejado que o processo trabalhe próximo aos pontos extremos (WITTENMARK, 1995). Em Feldbaum (1965) foi apresentada uma solução formal para o problema através do uso de programação dinâmica. Entretanto, essa solução é intratável do ponto de vista numérico e computacional em virtude do excesso de minimizações e cálculos de médias. Vale salientar que alguns casos simples foram resolvidos numericamente ou analitica-mente, como em Stemby (1976). Desde o trabalho de Feldbaum (1960-61), diversos pes-quisadores dedicaram-se ao problema do controle dual. Em virtude da complexidade da solução ótima, houve uma necessidade em obter diferentes aproximações que resultassem em soluções subótimas com características duais.
Em geral, os controladores subótimos são divididos em dois grandes grupos: (i) aque-les baseados em aproximações do problema adaptativo ótimo dual; e (ii) aqueaque-les baseados na reformulação do problema para obter uma solução mais simples do sistema, mantendo as características duais. Essas abordagens são chamadas métodos implícitos e explícitos, respectivamente. Ao longo destes cinquenta anos de pesquisas nessa área, dezenas de controladores duais subótimos foram concebidos. Inicialmente, as publicações tenderam a analisar exemplos, desenvolver teorias e investigar possíveis soluções.
Jacobs e Hughes (1974) desenvolveram controladores duais subótimos através de minimização da função de custo sob certas restrições. As restrições foram utilizadas no intuito de garantir um certo nível de exatidão das estimativas dos parâmetros. Jacobs e Hughes (1974) utilizaram restrições para o sinal de controle; Alster e Bélanger (1974) optaram por utilizar restrições na variância da estimação.
Em 1975, dois importantes trabalhos foram publicados na área: Wittenmark (1975b) e Wittenmark (1975a). O primeiro, é um survey que reúne dezenas de trabalhos sobre controle dual publicados até aquela publicação e consiste num bom referencial histórico das primeiras contribuições nessa área. O segundo retrata o controlador dual subótimo ativo - ASOD. A idéia deste controlador consiste em adicionar um termo à função custo de controle original, que reflete a qualidade da estimativa.
Milito e Cadorin (1982) apresentaram o controlador dual subótimo por inovações -IDC. Esse controlador criou uma lei dual subótima que busca um compromisso entre o controlador cauteloso e o controlador equivalente a certeza. O controlador cauteloso e o controlador equivalente a certeza não são controladores duais, porém são controlado-res precursocontrolado-res, uma vez que consistem em uma solução combinada de identificação e controle.
Em Chan e Zarrop (1985) a abordagem por inovações tornou-se uma versão dual para o controle generalizado de variância mínima - GMV. Três anos mais tarde, em Radenkovic (1988), foi obtida a prova de estabilidade global e forte consistência dos controladores duais baseados em inovações.
3
de uma minimização numérica, em virtude da equação para a função de custo ser de quinta ordem com respeito ao sinal de controle. Sendo assim, esse trabalho propôs uma substi-tuição da função de custo de quinta ordem por uma série quadrática, em que é possível obter uma solução analítica para o sinal de controle.
Maitelli e Yoneyama (1994a) apresentaram o controlador subótimo dual de multiestá-gios usando preditores ótimos aproximados. Esse controlador minimiza o desvio da saída da planta em relação à referência M passos adiante no tempo. Esse controlador subó-timo dual pode ser interpretado como uma melhoria realizada no controlador adaptativo preditivo de M estágios.
Em Filatov e Unbehauen (1995a) e Filatov e Unbehauen (1995b) foi apresentada a abordagem bicriterial para o controle dual. Esse método consiste basicamente em realizar duas minimizações da função de custo para obter a lei de controle dual. Esse método foi estendido para praticamente todos os sistemas adaptativos de controle (FILATOV; UNBEHAUEN, 2000). Kral e Simandl (2011) propuseram e discutiram um controlador dual preditivo para sistemas não lineares com incertezas baseado na abordagem bicriterial. Nos últimos anos, a maioria dos trabalhos relacionados à área de controle dual foca-ram bastante em aplicações, análises comparativas de controladores duais e abordagens do problema dual através de outras estratégias.
Cervin (1998) desenvolveu uma técnica com programação neural para cálculo de um controlador subótimo utilizando um algoritmo de iteração aproximada. Esse controlador obteve bons resultados para sistemas simples. Entretanto, a grande quantidade de parâ-metros de projeto a definir e o excesso de cálculos numéricos, inviabilizam essa técnica para sistemas mais complexos ou realísticos.
Lee e Lee (2009) aplicaram uma estratégia baseada em programação dinâmica aproxi-mada (ADP) para o problema do controle adaptativo dual. A partir de políticas de controle subótimas conhecidas, a abordagem por programação dinâmica aproximada pode derivar uma política de controle superior, a qual reduz a incerteza do parâmetro, levando a uma melhoria significativa de desempenho.
Flidr e Simandl (2013) apresentaram um novo controlador dual implícito para siste-mas estocásticos discretos lineares. A solução utiliza programação dinâmica e é utilizada uma regra de integração estocástica para determinar o sinal de controle.
Enquanto diversas soluções subótimas foram propostas e simuladas, a aplicação des-sas técnicas em processos industriais ainda é restrita. Em Ismail, Dumont e Backstrom (2003) foi implementado com sucesso um controlador dual subótimo na indústria de re-vestimento de papel. Foi a primeira vez que esse controlador foi aplicado a um processo industrial multivariável. O controlador permaneceu em funcionamento por quatro meses, obteve uma melhoria na qualidade do processo e foi capaz de controlar o processo durante todo o tempo proposto.
Bugeja, Fabri e Camilleri (2009) propuseram um controlador neuro-adaptativo para realizar o controle dinâmico de robôs móveis não-holonômicos. Esse trabalho apresentou novos esquemas para o controle dual adaptativo neural e sua eficácia foi comprovada por meio de simulações Monte Carlo para o problema de rastreamento de trajetória.
4 CAPÍTULO 1. INTRODUÇÃO
(1985). Originalmente, existe um parâmetro de projeto λ(lambda ) associado à função
f(P(k+2))a qual pretende assegurar uma boa estimação de parâmetros. Entretanto, esse
parâmetro é definido pelo usuário e a definição do valor apropriado para o mesmo é obtido após exaustivas simulações. Por este motivo, é proposto nesta tese um ajuste adaptativo do parâmetro λa cada passo, a fim de melhorar o desempenho e a robustez do
1.1. ORGANIZAÇÃO DO TEXTO 5
1.1
Organização do Texto
A presente tese se desenvolve em 5 capítulos, organizados conforme descrito a seguir. No capítulo dois são apresentados os aspectos do controlador dual, a formulação do problema de controle e da estimação e a descrição do modelo e do critério de desempenho. Além disso, apresentam-se as estratégias de controle adaptativo mais difundidas na litera-tura especializada e suas limitações quando aplicadas a sistemas fortemente variantes no tempo.
No capítulo três, destaca-se uma descrição dos controladores duais subótimos. É ex-posta uma série de controladores sugeridos na literatura a fim de solucionar o problema do controle dual. Ainda neste capítulo, mostram-se as simulações de vários controladores duais apresentados no trabalho.
No capítulo quatro é apresentada a proposta desta tese, desde os problemas originais encontrados até a solução proposta e as simulações do método para avaliar o desempenho do controlador.
Capítulo 2
Embasamento Teórico - Controle
Adaptativo dual
Um sistema de controle adaptativo consiste em um sistema de controle operando sob condições de incerteza, em que o controlador fornece um desempenho desejado através da alteração de parâmetros e/ou estruturas, a fim de reduzir as incertezas e melhorar a conformidade do sistema desejado (FILATOV; UNBEHAUEN, 2004).
2.1
Introdução
O projeto de um controlador quando se conhecem o seu modelo matemático e todos os seus parâmetros pode ser realizado utilizando-se as técnicas conhecidas da teoria de controle determinístico.
Caso os parâmetros do sistema sejam invariantes no tempo, o controlador poderá ter parâmetros fixos. O controlador PID, que pode ser sintonizado por métodos heurísticos como o de Ziegler e Nichols ou por métodos de otimização numérica, é um um exemplo deste tipo de controlador. Entretanto, se utilizarmos um controlador com parâmetros fixos em um sistema com parâmetros variáveis, o desempenho pode não ser satisfatório. Essa situação motivou o desenvolvimento de controladores adaptativos, ou seja, controladores que alteram seus parâmetros conforme mudam as características físicas do sistema.
Nos primeiros anos da década de 1950, diferentes estruturas de controle adaptativo foram desenvolvidas para lidar com os processos com parâmetros desconhecidos ou va-riantes no tempo. Dentre esses, destacam-se o controlador adaptativo por modelo de re-ferência (MRAC) e o controlador auto-sintonizável (STR -Self Tunning Regulator) (ÅS-TRÖM; WITTENMARK, 1995). Ambos controladores possuem uma realimentação so-bre o desempenho do sistema de malha fechada.
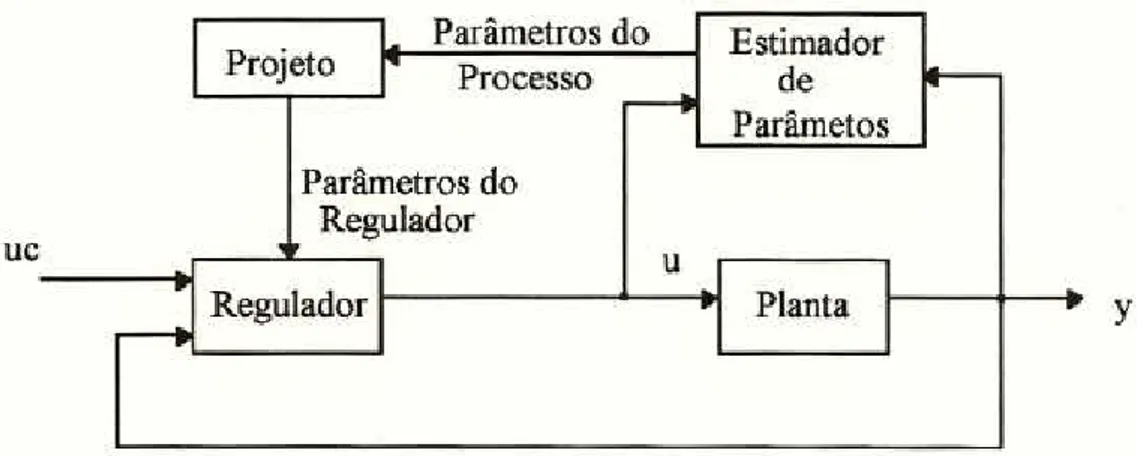
A estrutura típica do regulador auto-ajustável é apresentada na Figura 2.1. O mesmo pode ser visto como uma composição de laços. O laço interno consiste do processo e de um regulador de malha fechada. O laço externo ajusta os parâmetros do regulador através de um estimador de parâmetros recursivo e pelo projeto do controlador.
con-8 CAPÍTULO 2. EMBASAMENTO TEÓRICO - CONTROLE ADAPTATIVO DUAL
Figura 2.1: Diagrama de blocos do Regulador Auto-Sintonizável.
trole. O sistema também contém um laço de realimentação composto pelo processo e pelo controlador. O erro é obtido pela diferença entre as saídas do sistema e do modelo de refe-rência. O regulador (controlador) contém parâmetros que são modificados baseados nesse erro.
Figura 2.2: Diagrama de blocos de um controlador adaptativo por modelo de referência.
As informações transferidas do estimador são somente as estimativas de parâmetros do processo. A incerteza sobre as estimativas dos parâmetros não são levadas em conside-ração. Esses tipos de controladores são conhecidos por utilizar o princípio daequivalência
à certeza(CE). Os parâmetros do processo são estimados, utilizados e empregados como
se estes correspondessem aos seus valores verdadeiros. Isto significa que as incertezas sobre as estimativas dos parâmetros não são exploradas totalmente.
2.1. INTRODUÇÃO 9
percebe-se que essas estruturas de controle adaptativo não produzem controladores óti-mos.
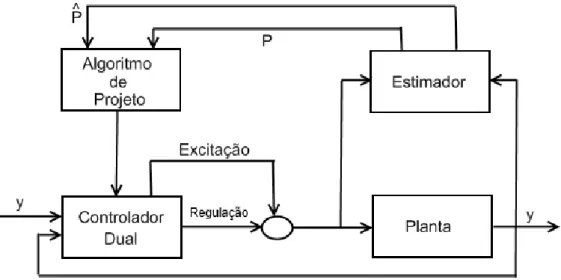
A Figura 2.3 apresenta a estrutura genérica do controlador adaptativo dual. A ideia básica é que a entrada do sistema desempenhe um papel dual: promover o aprendizado sobre o sistema e estabelecer boa regulação. Para garantir o aprendizado, a entrada intro-duz perturbações que rendam informações futuras sobre a dinâmica do sistema, e assim reduzam as incertezas. Para efetuar regulação, a entrada tenta manter a saída em um valor desejado. Na maioria dos casos estas duas regras são conflitantes e, então, o controla-dor deve estabelecer um compromisso ótimo entre aprendizado e regulação (MAITELLI, 1994).
Figura 2.3: Sistema adaptativo de controle dual.
Feldbaum (1960-61) esteve entre os primeiros a perceber que o controlador adaptativo ótimo deveria ser realmente um controlador dual. O controlador não deveria somente
controlar o processo, mas também, às vezes, excitar o processo a fim de que melhores
estimativas pudessem ser obtidas e, assim, melhorar o desempenho a longo prazo. Através da programação dinâmica, é possível formular o controlador adaptativo dual ótimo.
O resultado é uma equação recursiva funcional, conhecida como equação de Bell-man. Essa equação é bastante complexa para resolver. Não existe solução analítica, exceto em casos triviais. Uma solução numérica requer uma grande carga computacional e torna-se impossível executar em problemas reais. O desenvolvimento, algumas análises e discussões da solução para o problema do controle ótimo dual podem ser encontradas em Veressinina Y. ; Wall (1999).
10CAPÍTULO 2. EMBASAMENTO TEÓRICO - CONTROLE ADAPTATIVO DUAL
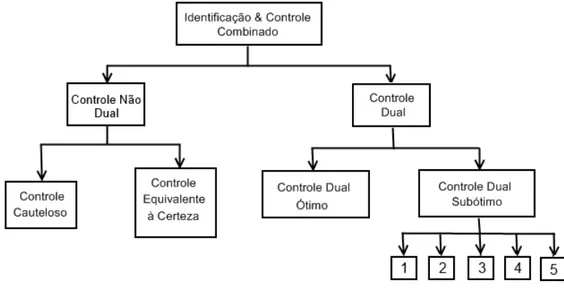
Figura 2.4: Organização das soluções combinadas do problema de identificação e con-trole.
A primeira divisão ocorre entre os controladores não duais e os controladores duais. Os controladores não duais não realizam a provocação no sistema, logo o aprendizado é acidental ou passivo, ou seja, não existe um controle provocador (probing control) inten-cional. Oscontroladores equivalente à certezasão exemplos típicos dessa classe.
O outro tipo de controlador dessa classe é o controlador cauteloso. O controlador cauteloso é obtido a partir de uma modificação no controlador equivalente à certeza. Esse controlador é obtido quando o horizonte de controle na função de custo é igual a um. Ambos controladores, equivalente à certeza e cauteloso, não tomam nenhuma ação com o intuito de melhorar a informação sobre os parâmetros desconhecidos. Na próxima seção, esses controladores serão especificados matematicamente.
Já os controladores duais abrangem os controladores duais ótimos e os controladores duais subótimos. Os controladores duais subótimos buscam encontrar aproximações ou outras maneiras para alterar o controlador de tal modo que características duais sejam in-troduzidas. Basicamente, existem duas maneiras para conseguir esse objetivo: realizando várias aproximações a partir do problema ótimo do controle dual ou reformulando o pro-blema de maneira que a solução mais simples possa ser calculada. As principais maneiras para desenvolver controladores duais subótimos são:
1. Adicionar sinais de perturbação ao controlador cauteloso; 2. Restringir a variância dos parâmetros estimados.
3. Realizar aproximações da função de custo. 4. Modificar a função de custo.
5. Resolução numérica a partir de conjunto de parâmetros finitos.
2.2. DESCRIÇÃO DO PROBLEMA 11
de controle sob certas restrições. A intenção também é garantir um nível de precisão nas estimativas de parâmetros.
A terceira técnica busca realizar uma aproximação da função de custo. Essa aproxi-mação visa simplificar a função de custo de modo que as informações estejam disponíveis mais facilmente. O penúltimo método pretende modificar a função de custo original adi-cionando termos simples que refletem a qualidade da estimativa futura. Por fim, a última possibilidade listada para obter controladores duais subótimos são através dos métodos numéricos a partir da otimização da equação de Bellman.
2.2
Descrição do Problema
2.2.1
O modelo
Considere a classe de estrutura de modelos do tipo ARX (AutoRegressive with eXter-nal input), discreto no tempo e no formato de equação de diferenças:
y(k)+a1(k)y(k−1) +· · ·+am(k)y(k−m) =
b1(k)u(k−1) +· · ·+bn(k)u(k−n) +e(k)
(2.1)
em que y(k)∈ℜm é a saída do sistema, u(k)∈ℜn é a entrada e e(k)∈ℜ é o ruído. A
sequência de ruídoe(k)é um conjunto de variáveis aleatórias independentes com
distri-buição gaussiana, média zero e desvio padrãoσ. Além disso, é suposto que a sequência de
ruídos seja independente dey(k−1),y(k−2), ...,u(k−1),u(k−2), ...,a1(k),a2(k), ...,am(k),
b1(k),b2(k), ...,bn(k))e queb1(k)6=0 para todo instantek.
O vetor de parâmetros variantes no tempo:
x(k) = [a1(k)a2(k) · · · am(k)|b1(k)b2(k) · · · bn(k)]T (2.2)
é modelado por um processo Gauss-Markov, o qual satisfaz a equação de diferenças esto-cástica:
x(k+1) =Φx(k) +ν(k) (2.3)
em queΦ∈ℜ(m+n)x(m+n) é uma matriz(m+n)por(m+n)conhecida eνk∈ℜm+n,k=
0,1,2, ...,Né o vetor de ruído do parâmetro. A sequênciaν(k)é uma sequência de vetores normais independentes igualmente distribuídos com média zero e matriz de covariância Cv. O estado inicial do sistema (2.3) é assumido ser normalmente distribuído com valor
médio:
E{x(0)}=vm (2.4)
e covariância:
cov{x(0),x(0)}=R0 (2.5) considera-se também quee(k)é independente deν(k).
O modelo do sistema (2.1) pode ser reescrito, numa forma compacta, como:
12CAPÍTULO 2. EMBASAMENTO TEÓRICO - CONTROLE ADAPTATIVO DUAL
em que:
θ(k) = [−y(k−1) −y(k−2)· · · −y(k−m)|u(k−1)u(k−2)· · ·u(k−n)] (2.7)
é o vetor de entradas e saídas passadas. Portanto, o modelo do sistema é definido pelas equações (2.3) e (2.6).
2.2.2
O critério
O propósito do controlador é, dado um sinal de referência yr(k), fazer com que a
saída do sistema y(k)siga o mais próximo possível em N passos de controle. O critério
de controle quadrático a seguir é utilizado para quantificar o erro de rastreamento:
N
∑
k=1
w(k) (y(k)−yr(k))2 (2.8)
em quew(k)é uma sequência de pesos que expressa uma decisão de quão importante são
os erros iniciais e futuros. Para levar em consideração a influência da sequência de ruídos e(k), é necessário o uso da esperança estocástica:
JN =E
N
∑
k=1
w(k) (y(k)−yr(k))2 !
(2.9)
A equação (2.9) será o critério a partir do qual o desempenho de cada controlador será avaliado. O controlador que apresentar os menores índices para esse critério será considerada a melhor solução em controle.
O problema de projeto do controlador é formulado como sendo a seleção da sequência de controlesu(i),i=k, ...,k+N−1, que minimiza a função custo dada por (2.9) sujeita às equações do sistema (2.3) e (2.6). O controle deve ser causal, ou seja, o sinal de controle no instantek,u(k),pode depender somente de medidas e controles atuais e passados.
Vale ressaltar que existem outros índices de critérios para avaliação desses controla-dores. A essência é semelhante em todos esses critérios. Em Lindoff, Holst e Wittenmark (1999), o valor RMS entre a saída e a referência é utilizado para avaliar o desempenho dos controladores.
ˆ
RMS=
s
1
T−n+1
T
∑
t=n
(y(k)−yr(k))2 (2.10)
em queT é o tamanho de cada simulação.
2.2.3
A estimação de parâmetros
2.3. CONTROLADOR EQUIVALENTE À CERTEZA 13
Teorema número 1 - Distribuição condicional dos estados
Considerando o modelo de variação dos parâmetros dado pela equação (2.3), com a saída definida pela equação (2.6), em que e(k)e v(k) são variáveis gaussianas
indepen-dentes com média zero e covariânciasσ2 eCv, respectivamente; temos que a distribuição
condicional dex(k), dadoIk−1, é gaussiana com média ˆx(k)e matriz de covariânciaP(k),
satisfazendo as seguintes equações de diferença, (MAYBECK, 1982). ˆ
x(k+1) =Φxˆ(k) +K(k) (y(k)−θ(k)xˆ(k))
P(k+1) = Φ−K(k)θT(k)
P(k)ΦT+Cv
K(k) =ΦP(k)θT(k) θ(k)P(k)θT(k) +σ2−1
(2.11)
com condições iniciais
ˆ
x(0) =x0
P(0) =R0 (2.12)
A distribuição dey(k), dadoIk−1, é também gaussiana com média: ˆ
y(k) =θ(k)xˆ(k) (2.13)
e covariância
σ2y(k) =θ(k)P(k)θk(k) +σ2 (2.14)
em queIk−1é o conjunto de medidas e controle passados, também chamado de conjunto informação,Ik, ou seja:
Ik={Y0k,U0k−1} ⊃Ik−1 (2.15) em que
Yik = {y(j)}kj=i e Uik = {u(j)}kj=i (2.16) Prova: Em virtude do teorema acima ser idêntico ao teorema de filtro de Kalman, mais detalhes da prova do teorema podem ser encontrados em livros tradicionais de controle estocástico, como em Chen (1985) e em Anderson e Moore (1979).
As estimativas dos parâmetros desconhecidos são obtidas pelas equações ordinárias de Kalman. É importante salientar, entretanto, que a matrizP(k)não pode ser pré-computada
em virtude de depender da atual realização do vetorθ(k). No tempok−1 o vetorθ(k)é
conhecido e pode ser utilizado nas equações de estimação acima apresentadas.
2.3
Controlador Equivalente à Certeza
O controlador equivalente à certeza, introduzido na seção 2.1, juntamente com o con-trolador cauteloso, são os concon-troladores precursores dos concon-troladores duais subótimos. Nesse controlador, as estimativas ˆx(k)são utilizadas para formular a lei de controle como
14CAPÍTULO 2. EMBASAMENTO TEÓRICO - CONTROLE ADAPTATIVO DUAL
incerteza envolvida no processo de um único estágio é ignorada. A lei de controle pode ser obtida através da malha de controle de realimentação ou através da minimização do critério (2.9) paraN=1.
uce(k) =
yr(k)−θ˜(k)xˆ(k)
ˆ
b1(k) (2.17)
em que
˜
θ(k) = [−y(k−1) · · · −y(k−m)|0 u(k−2) · · · u(k−n)] (2.18)
o vetor ˜θ(k)é similar aoθ(k), exceto queu(k−1)é substituído por zero.
O bom desempenho desse controlador está diretamente ligado a qualidade das estima-tivas para as variáveis estimadas. Além disso, é necessário assegurar que ˆb1seja diferente de zero.
2.4
Controlador Cauteloso
O controlador cauteloso é aquele que minimiza a cada instanteko desvio da saída em relação ao valor desejado apenas um passo adiante, ou seja, minimiza a função de custo (2.9) comN=1. A minimização do controlador diverge bastante em complexidade caso
a variávelN seja maior do que 1.
J1=E{(y(k+1)−yr(k+1))2|Ik} (2.19)
Segue do lema fundamental do controle estocástico (ÅSTRÖM; WITTENMARK, 1971), que
min
u(k+j−1)...u(kN−1)
E
( N
∑
i=j
(y(k+i)−yr(k+i))2 )
=
EIk+j−1 minE
( N
∑
i=j
(y(k+i)−yr(k+i))2|Ik+j−1
)! (2.20)
O problema é determinar o sinal de controle u(k) que minimize a função de custo
(2.19). A distribuição condicional dey(k+1), dadoyk, é normal com valor médio
E(y(k+1)|yk) =θ(k+1)xˆ(k+1) (2.21)
e covariância
cov(y(k+1),y(k+1)|yk) =θ(k+1)P(k+1)θ(k+1)T +σ2 (2.22)
Utilizando as equações (2.3) e (2.6) podemos escrever que:
En(y(k+1)−yr(k+1))2|yk o
= (θ(k+1)xˆ(k+1)−yr(k+1))2+
+θ(k+1)P(t+1)θT(k+1) +σ2
2.5. CONCLUSÃO 15
Definindo o vetor
l= [0 0. . .0|1 0· · ·0] (2.24) podemos escrever que:
θ(k+1) =lu(k) +θ˜(k+1) (2.25)
em que ˜θ(k)é definido em (2.18)
Substituindo (2.25) em (2.23), temos:
= θ˜(k+1)xˆ(k+1) +bˆ1(k+1)u(k)−yr(k+1)
+ +θ˜(k+1)P(k+1)θ˜T(k+1) +u2(k)pb1(k+1)+
+2u(k)lP(k+1)θ˜T(k+1) +σ2
(2.26)
em que pb1 é a variância do parâmetro estimado ˆb1. A equação (2.26) é quadrática em
u(k) portanto, realizando a minimização em relação a u(k), obtemos o controlador
um-passo-adiante, ou controlador cauteloso:
uca(k) =−
˜
θ(k+1)xˆ(k+1)bˆ1(k+1) +lP(k+1)θ˜T(k+1)−yr(k+1)bˆ1(k+1)
ˆ
b21(k+1) +pb1
(2.27)
O controlador cauteloso mostrado na equação (2.27) difere do controlador equivalente à certeza apresentado na equação (2.17) devido às incertezas dos parâmetros estimados que agora são levadas em consideração. É possível reduzir o sinal de controle cauteloso ao sinal de controle equivalente à certeza, desprezando as incertezas na equação (2.27), ou seja, fazendoP(k+1) =0.
uce(k) =
yr(k+1)−θ˜(k+1)xˆ(k+1)
ˆ
b21(k+1) (2.28)
A magnitude do sinal de controle (2.27) diminuirá caso a variância do parâmetro esti-mado(pb1)aumente. Isso compromete a estimação dos parâmetros no próximo passo e a
variância tende a aumentar ainda mais. Assim, o controlador entra em um círculo vicioso e a magnitude do sinal de controle torna-se muito pequena durante vários períodos de tempo. Esse fenômeno é chamado deturn-off (ÅSTRÖM; WITTENMARK, 1995).
O desligamento do sinal ocorre geralmente quando o sinal de controle e o parâmetrob possuem valores pequenos. Esse problema torna a aplicação do controlador inviável para sistemas de controle onde os parâmetros tenham variação rápida.
2.5
Conclusão
16CAPÍTULO 2. EMBASAMENTO TEÓRICO - CONTROLE ADAPTATIVO DUAL
Capítulo 3
Controladores Duais Subótimos
3.1
Introdução
Esse capítulo apresentará diferentes abordagens para soluções aproximadas referentes ao problema do controle dual ótimo. O controlador dual ótimo é de uso prático limi-tado devido à grande carga computacional envolvida. Entretanto, a característica dual do controlador de estabelecer um bom controle e, ao mesmo tempo, reduzir incertezas é de grande interesse. Essa característica não está presente no controlador cauteloso, pois a magnitude de seu sinal de controle decresce com o aumento das incertezas sobre as esti-mativas dos parâmetros, podendo levar ao fenômeno de desligamento do sinal de controle. Assim, muitos controladores subótimos foram desenvolvidos através de aproximações ou reformulações do problema.
A simplicidade do controlador cauteloso e o fenômeno do turn-off motivaram algu-mas sugestões de controladores duais subótimos. Algualgu-mas dessas modificações serão discutidas nas seções seguintes. Posteriormente, outros controladores subótimos duais também serão abordados a fim de sintetizar, de maneira geral, as soluções existentes para o problema do controle dual ótimo.
3.2
Controlador com sinal de perturbação
O fenômeno de desligamento do sinal de controle ocorre devido à falta de excitação ao sistema. Wieslander e Wittenmark (1971) sugeriram a adição de um sinal de perturbação, ruído branco ou sinais do tipo PRBS, a fim de aumentar a excitação do sistema e, con-sequentemente, aumentar a precisão das estimativas. A perturbação pode ser adicionada todo o tempo ou somente quando a incerteza sobre os parâmetros exceder algum limite. O novo controlador terá o seguinte formato:
uperturb(k) =uca(k) +up(k) (3.1)
em queuca é o sinal de controle cauteloso e up é o sinal de perturbação adicionado
18 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
sistemática de decidir o exato momento e a intensidade do sinal que deve ser adicionado.
3.3
Controlador com restrições
Outra classe de controladores duais utilizam a expressão analítica simples do contro-lador cauteloso (2.27) e obtém novas leis de controle através da minimização da função de custo com algumas restrições. Essas restrições são utilizadas para garantir um nível de exatidão das estimativas de parâmetros e, consequentemente, evitar o desligamento do sinal de controle. As restrições se resumem, basicamente, à limitação do valor mínimo do sinal de controle e a limitação na variância dos parâmetros.
Jacobs e Hughes (1974) definiram um método de restrição onde um sinal cauteloso extra é adicionado caso o sinal de controle cauteloso original seja inferior a um sinal limitante:
u(k) =
(
ulimsign(uca) , se|uca|<|ulim|
uca , se|uca| ≥ |ulim|
(3.2)
em que a função ulimsign() representa o sinal de controle máximo ou mínimo definido
pelo usuário.
Alster e Bélanger (1974) definiram a minimização da função de custo sujeito à se-guinte restrição:
trP−1(k+2)≥M (3.3)
ondeP−1é a matriz de informação. A limitação em seu traço significa que a informação sobre os parâmetros é forçada a ser sempre maior que um valor estabelecidoM.
Mosca, Rocchi e Zappa (1978) definiram uma abordagem similar a Alster e Bélanger (1974) para obter a lei de controle. Todavia, a restrição envolve as estimativas atuais dos parâmetros estimados:
pb1(k+2)≤ (
γbˆ21(k+2) , se pb(k+1)≤bˆ21(k+1)
αpb , caso contrário
(3.4)
em queγeαsão coeficientes lineares determinados pelo usuário.
A vantagem dessas modificações consiste em que os controladores com características duais são obtidos de uma maneira simples. Esses controladores (3.2), (3.3) e (3.4) não previnem o desligamento do sinal, em virtude da lei de controle cautelosa ser modificada somente próxima do fenômeno ocorrer. Por isso são chamados de controladores passi-vos. Além disso, esses controladores contém parâmetros que devem ser escolhidos pelo usuário.
3.4
Controlador dual subótimo ativo
3.4. CONTROLADOR DUAL SUBÓTIMO ATIVO 19
reflete na qualidade da estimativa de parâmetros. Essa sugestão leva a função de custo a
Jasod =E n
(y(k+1)−yr(k+1))2+λf(P(k+2)|It o
(3.5)
em que λ∈ℜ é um peso ajustável, entre 0 e 1, utilizado para agregar os funcionais
de custo do controle imediato e da estimação futura. A função f(·)deve ser positiva e
monotonicamente crescente. O objetivo do termo adicional na função custo de um estágio é assegurar uma boa estimativa de parâmetros. Isso implica que os elementos da diagonal de P(k+2) devem ser pequenos em magnitude. Caso a estimativa seja boa, ou seja o
valor da variância pb1 pequeno, então o controle não sofrerá o efeito de desligamento
do sinal, bem como haverá excitação ao sistema, garantindo uma boa estimativa para os outros parâmetros.
Utilizando as fórmulas de estatística conhecidas, como em (2.23), e a equação de estimação da matriz de variância, seção (2.2.3), a função de custo (3.5) pode ser assim representada:
minu(k)Jasod =min n
[(θ(k+1)xˆ(k+1)−yr(k+1))2+θ(k+1)P(k+1)θ(k+1)T+
+σ2] +λf(φP(k+1)φT+Cv−φP(k+1)θ(k+1)T θ(k+1)P(k+1)θ(k+1)T+σ2−1
θ(k+1)P(k+1)φT)o
(3.6) em que a função f(·)é de livre escolha do projetista. A intenção desse termo adicional é
garantir que os elementos da diagonal dessa matriz sejam os menores possíveis. Escolhas razoáveis para a função f são:
f(P(k+2)) =pb0(k+2) (3.7)
ou
f(P(k+2)) =tr(pb1(k+2)) (3.8)
ou
f(P(k+2)) =σ2pb1(k+2)
pb1(k+1)
(3.9)
A função de custo desse controlador(equação 3.6)possui a desvantagem de não ser
quadrática emu(k). Assim, não é possível obter uma expressão analítica dessa função
para obter a lei de controle através da minimização. O trabalho sugere uma minimização numérica.
O procedimento de busca do mínimo da função é facilitado em virtude de conheci-mento das propriedades da matriz de variância e da função de custo. A função de custo desse controlador é de quinta ordem. Portanto, a função possui um, dois ou três mínimos locais. Assim, a busca pelo mínimo global não é tão trivial e é realizada em diferentes intervalos e usando as propriedades da matriz P de estimação.
A escolha do parâmetro λ de f P(k+2), realizada pelo usuário, não é definida no
20 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
muito importante em alguns casos e utilizam um algoritmo adaptativo para determinar esse parâmetro.
3.5
Controlador dual subótimo ativo aproximado
O controlador subótimo dual ativo aproximado é baseado na mesma função de custo determinada pelo controlador ASOD ( 3.5).
Jasod =E n
(y(k+1)−yr(k+1))2+λf(P(k+2)|Ik o
Em geral não é possível minimizar esta função de custo analiticamente em virtude da matrizP(k+2)ser um função não linear deu(k). Para evitar um procedimento iterativo
com o objetivo de obter uma solução, uma aproximação em série foi proposta a fim de obter uma solução analítica. A partir de uma expansão em série da função de custo ao redor de um controle nominal e mantendo os termos de primeira e segunda ordem, será possível obter uma expressão analítica para o sinal de controle.
A função de custo (3.6) pode ser reescrita da seguinte forma:
Jasda= ˜
θ(k+1) +lu(k)
ˆ
x(k+1)−yr(k+1)
+
˜
θ(k+1) +lu(k)
P θ˜(k+1) +lu(k)T
+σ2+λL(u) (3.10)
em que
L(u) =σ2l[ΦP(k+1))Φ+R1+
ΦP(k+1) θ˜(k+1) +lu(k)T ˜
θ(k+1) +lu(k)
P(k+1)TΦT)
˜
θ(k+1) +lu(k)
P θ˜(k+1) +lu(k)T
+σ2 ]l
T ÷lP(K+1)lT
=σ2
lR1lT+
Φ2bhpb1 ˜
θ(k+1)P(k+1)θ˜(k+1)T+σ2
−
lP(k+1)θ˜(k+1)T2i
pb1u2+2lP(k+1)θ˜(k+1)u(k) +θ˜(k+1)P(k+1)θ˜(k+1)T +σ2
÷lP(k+1)lT
(3.11)
Agora temos uma função de custoJasda como uma função deu(k)somente, uma vez
que ˜θ(k+1) não é influenciado poru(k). A expansão em série no pontounom fornece a
aproximação
Jasda(u)≈Jasda(unom) +
∂Jasda(unom)
∂u (u−unom)
+1
2
∂2Jasda(unom)
∂u2 (u−unom) 2
3.5. CONTROLADOR DUAL SUBÓTIMO ATIVO APROXIMADO 21
As derivadas parciais deJasdasão dadas por: ∂Jasda(unom)
∂u =2
˜
θ(k+1)xˆ(k+1) +b1uˆ (k)−yr(k+1)b1ˆ +lP(k+1)θ˜(k+1)T+pb1
+λ∂L ∂u
∂2Jasda(unom)
∂u2 =2 ˆb 2 1+pb1
+λ∂
2L
∂u2
(3.13) Para facilitar a compreensão, introduz-se a notação
d1=lP(k+1)θ˜(k+1)T
d2=pb1 θ˜(k+1)P(k+1)θ˜(k+1)T +σ2
−d12 (3.14)
As derivadas parciais da funçãoL(u)são dadas por
∂L
∂u =−Φ 2
bd2
2(pb1u(k) +d1)
pb1u2+2d1u(k) +θ˜(k+1)P(k+1)θ˜(k+1)T+σ2 2
σ2
pb1
∂2L
∂u2 =Φ 2
bd2
6(pb1u(k) +d1)2−2d2
pb1u2+2d1u(k) +θ˜(k+1)P(k+1)θ˜(k+1)T+σ23
σ2
pb1
(3.15)
Minimizando a expressão da segunda ordem de Taylor ( 3.12) temos
∂Jasda(u)
∂u ≈2
˜
θ(k+1) +lunom
ˆ
x(k+1)−yr(k+1) ˆ
b1+d1+pb1unom
+λ∂L(unom)
∂u +
2 ˆb21+pb1+λ∂ 2L(u
nom) ∂u2
(u−unom)
(3.16)
Assim, temos a lei de controle por aproximação da função de custo
u∗=unom−
2 ˜
θ(k+1) +lunom
ˆ
x(k+1)−yr(k+1) ˆ
b1+d1+pb1unom +λ∂L(u∂unom)
2 ˆb21+pb1
+λ∂2L(unom) ∂u2
(3.17)
22 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
3.6
Controlador dual por inovações
Milito e Cadorin (1982) apresentaram o controlador dual por inovações. O controla-dor é caracterizado por tentar realizar o compromisso entre os dois controlacontrola-dores extremos não duais: o controlador equivalente à certeza e o controlador cauteloso. A solução ana-lítica desse controlador mostra que a lei de controle é regulada por um parâmetroλe está situada entre esses dois controladores. O controlador dual por inovações é definido como o controlador que minimiza
Jidc=E
(y(k+1)−yr(k+1))2−λ(k+1)υ2(k+1) (3.18)
em que
υ(t+1) =y(t+1)−yˆ(t+1) =y(t+1)−θ(t+1)xˆ(t+1) (3.19)
e λé o parâmetro de aprendizagem, designado pelo usuário, que reflete o grau de
com-promisso entre o efeito de controle imediato e o efeito de aprendizagem do controlador. O valor do parâmetro λ pode variar entre os limites 0 e 1. A ideia deste controlador é
atuar no sistema de acordo com a diferença entre a saída da planta real e a saída da planta estimada um passo adiante no tempo.
Assim, o sinal de controleuidc(t)que minimiza a função de custo (3.18) é
uidc(t) =−
˜
θ(t+1)xˆ(t+1)bˆb1+ (1−λ)IP(t+1)θ˜T−yrbˆb1
ˆ
b2b1+ (1−λ)pb1
(3.20)
É importante observar que é possível obter o controlador equivalente à certeza e o controlador cauteloso a partir desse controlador. Isso ocorre quando o valor de λ for,
respectivamente, igual a 0 e 1.
3.7
Controlador dual por bicritério
A ideia básica do controlador dual por bicritério (BDC) consiste na minimização de duas funções de custo, que correspondem às duas metas do controlador dual. O método é baseado em duas minimizações sequenciais onde, primeiramente, é realizado a minimi-zação de acordo com (2.23), onde são obtidos os resultados do controlador cauteloso. Em seguida, uma segunda função de custo é minimizada
J=−En y(k+1)−b1ˆ (t)u(k)2
|Iko (3.21)
onde, nessa segunda minimização, algumas restrições são utilizadas ao redor da primeira minimização no seguinte formato
Ωt ={uca(t)−f(Pk);uca+f(Pk)} (3.22)
cau-3.8. CONTROLADOR MULTIESTÁGIOS USANDO PREDIÇÃO ÓTIMA APROXIMADA23
telosa. Assim, a lei de controle dual por bicritério pode ser assim definida
u(k) =uca(k) +sgn{uca(k)}θ(k) (3.23)
em que
sign(x) =
(
1, se x ≥0
−1, se x <0 (3.24)
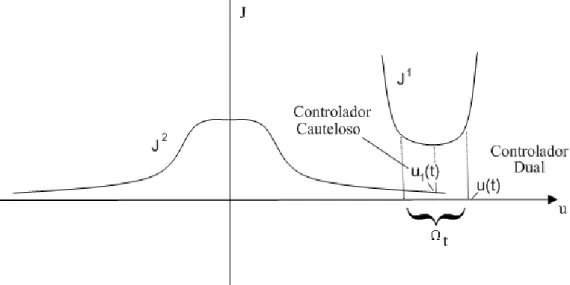
A otimização bicriterial realizada para formular o sinal de controle dual é retratada na Figura 3.1. O sinal de controle cauteloso minimiza a primeira função de custo (J1). O
sinal de controle dual é obtido a partir da minimização da segunda função de custo(J2)
de acordo com as magnitudes de excitação no domínioΩt que representa a região ótima
da primeira função de custo. Diferentemente de outros controladores duais explícitos, como por exemplo o controlador dual por inovações(3.7), o parâmetro θ(k)possui uma
interpretação física clara: a importância das excitações. A partir das excitações no sistema a lei controle obtida será definido apropriadamente.
Figura 3.1: Minimizações da abordagem do controlador dual por bicritério.
3.8
Controlador multiestágios usando predição ótima
apro-ximada
24 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
A função de custo a ser minimizada é dada por
VM′ =E
( 1 M M
∑
i=1y′(k+i)−yr(k+i) 2
|Ik
)
(3.25)
em quey′(k+i)é calculada a partir da saíday(k+i), dada por
y(k+i) =θ(k+i)
"
Φi−1x(k+1) +
i−1
∑
j=1
Φj−1(Γw(k+i− j) +v(k+i− j))
#
+e(k+i)
(3.26) e
θ(k+i) = [−y(k+i−1) −y(k+i−2) · · · − y(k+1) −y(k+i−m)|
u(k−d+i) u(k−d+i−1) · · · u(k−d−n+i+1)] (3.27)
em que
θ(k+i) = [−yap(k+i−1) −yap(k+i−2) · · · −yap(k+i) −yap(k+i−m)| u(k−d+i) u(k−d+i−1) · · · u(k−d−n+i−1)]
(3.28)
yap(k+j) =θ(k+j)
"
Φj−1xˆ(k+1) +
j−1
∑
i=1
Φi−1Γw(k+ j−i)
#
(3.29)
A ideia em se propor a função de custo (3.25) é a de que forçando o controlador a minimizar o desvio da saída em relação à referência vários passos adiante, o mesmo terá que investir também na estimação. Isto dará ao mesmo uma característica dual. São utilizadas saídas aproximadas y′(k+i) para substituir as saídas reais y(k+i), porque é
necessário realizar algumas aproximações com momentos de ordem superior.
3.9. SIMULAÇÕES - CONTROLADORES DUAIS SUBÓTIMOS 25
3.9
Simulações - controladores duais subótimos
Essa seção apresenta um exemplo de solução do problema de controle dual para um integrador com ganho variável no tempo. É avaliado o desempenho de alguns controlado-res duais apcontrolado-resentado nas seções anteriocontrolado-res. As simulações foram realizadas utilizando o programa MatlabR. O programa permite que sejam comparadas leis de controle diferen-tes utilizando a mesma sequência de ruídos. O programa foi desenvolvido de modo que diferentes sistemas, com parâmetros facilmente ajustáveis, possam ser simulados simul-taneamente. Sendo assim, foram realizados testes para diversas configurações de sistema. O método estatístico de simulação Monte Carlo foi utilizado para auxiliar na deter-minação da solução no programa (MAK; MORTON; WOOD, 1999). A importância da incerteza nos modelos matemáticos é expressa no valor esperado da informação. Em si-tuações em que não se pode determinar precisamente o comportamento dos ruídos, bem como reunir mais informações sobre o futuro do sistema, é pertinente para os controlado-res conhecerem o comportamento do sistema em relação às mais diversas situações a que os problemas estocásticos se submetem (BIRGE, 1981).
3.9.1
Sistema de primeira ordem
Utilizou-se um sistema de primeira ordem para comparar os seguintes controladores: • Controlador equivalente à certeza
• Controlador cauteloso • Controlador com restrições
• Controlador aproximado dual ativo • Controlador dual por inovações • Controlador dual por bicritério
O processo a ser controlado é um sistema de primeira ordem com ganho variável no tempo. O modelo possui a seguinte configuração
y(t) +a(t)y(t−1) =b(t)u(t−1) +e(t) (3.30)
onde
a(t+1) =−0.9 (3.31)
b(t+1) =0.9b(t) +v(t) (3.32)
Os ruídose(t)ev(t)têm média zero e desvios padrões 0,5 e 1,0, respectivamente. O
valor de referência é 1,0.
A simulação Monte Carlo é utilizada para comparar o desempenho desses controlado-res. São realizadas 300 simulações diferentes para cada controlador, onde cada simulação possui 400 passos. Assim, são calculados a perda média por passo ¯V e o desvio padrão
σv, dados por
¯
V = 1
26 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
σv= r 1 300 300
∑
i=1(Vi−V¯)2 (3.34)
em que
Vi=
1 400
400
∑
j=1
(y(t+j)−yr(t+j))2 (3.35)
e o valor médio da variância do parâmetro b(pb)é dado por
¯ pb=
1 300 (300
∑
i=1 pbi ) (3.36) em quepbi=
1 400
400
∑
j=1
pb0(j) (3.37)
Utilizou-se a mesma sequência de ruídos para todos os controladores, ou seja, para cada valor de i em (3.33), (3.34) e (3.36) estava associada uma sequência de ruídos,v(t)
e e(t), k=1,· · ·,400. Não existe relevância estatística em comparar os resultados de dois controladores onde os ruídos apresentam configurações distintas.É importante res-saltar também que a média obtida da Equação 3.33 e 3.34 mede a qualidade do controle, enquanto que a média obtida pela Equação 3.36 mede a qualidade na estimação dos parâ-metros.
Em cada simulação são observadas diversas características da planta, dentre estes: pa-râmetro real variante no tempo, papa-râmetro estimado variante no tempo, papa-râmetros fixos, entrada do sistema, saída da planta, perda acumulada, variância do parâmetro variante do tempo, dentre outros. Os gráficos do parâmetro real e do parâmetro estimado serão sempre exibidos em conjunto devido ao efeito comparativo visual. Além disso, é válido ressaltar que o parâmetro real sempre será a linha uniforme preta e o parâmetro estimado será a linha pontilhada colorida.
3.9.2
Simulação - controlador equivalente à certeza
A Figura 3.2 apresenta uma realização para o controlador não dual equivalente à cer-teza (2.3). Apesar de não ser um controlador com características duais, serão expostos os resultados tanto desse como do controlador cauteloso, a fim de demonstrar os problemas e a falta de dualidade dos mesmos.
Observa-se claramente que o controlador equivalente à certeza falha em tentar contro-lar o processo. O total de perda acumulada chega quase a∑y2=1,5·107.
3.9. SIMULAÇÕES - CONTROLADORES DUAIS SUBÓTIMOS 27
28 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
definitivamente, ainda assim o controlador não representa uma solução subótima com características duais para o problema.
3.9.3
Simulação - controlador cauteloso
A Figura 3.3 apresenta outra realização para o controlador cauteloso (2.4). A simula-ção considera o mesmo ruído do sistema e da variasimula-ção de parâmetro da realizasimula-ção anterior. Esse controlador sempre vai preferir controlar do que buscar excitar o sistema em con-junto (ação dual) em virtude dessa última precisar de pelo menos dois passos adiante para surtir algum efeito.
Observa-se que este controlador é, de fato, bastante cauteloso. O sinal de controle é muito menor e a variância da saída também é menor em comparação ao controlador equivalente à certeza. O total de perda acumulada é significativamente menor, porém ainda é alta.
É importante salientar o fenômeno de desligamento do sinal (turn-off) o qual pode ser visto claramente nos instantes t =22, t =115 et =312. Nesses instantes, a incerteza
do parâmetro é muito alta (P>5) e o sinal de controle cauteloso tende à zero. Em consequência, isso gera menos excitação e causa uma incerteza ainda maior. A estimativa irá tender a zero e a saída a afastar-se, aumentando assim a perda acumulada do sistema.
3.9.4
Simulação - controlador por restrições
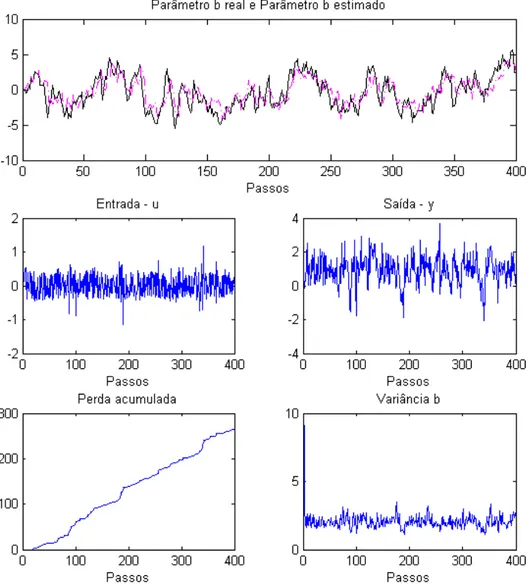
Os controladores duais com restrições foram umas das primeiras soluções subótimas encontradas. As restrições variam desde o sinal de controle até a matriz de variância con-forme foi comentado em (3.3). A Figura 3.4 apresenta os resultados de um controlador por restrição da lei de controle para a mesma realização dos controladores anteriores, ou seja, com a mesma sequência de ruídos. Dentre os controladores por restrições apresen-tados, optamos pela implementação do controlador de Jacobs e Hughes (1974).
Este controlador utiliza uma restrição na atualização da lei de controle através de um limite superior positivo e um limite inferior negativo. Em geral, o resultado dos con-troladores por restrições somente amenizam e evitam os incidentes apresentados pelo controlador cauteloso sendo, portanto, chamados controladores passivos.
Neste controlador é possível observar melhoras significativas em diversos pontos do sistema. Primeiramente, o fenômeno de desligamento do sinal não acontece devido as restrições. Em muitos momentos o sinal de controle trabalha como um relé alternando o sinal de controle entre+lim(u(t))e−lim(u(t)).
3.9. SIMULAÇÕES - CONTROLADORES DUAIS SUBÓTIMOS 29
30 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
3.9. SIMULAÇÕES - CONTROLADORES DUAIS SUBÓTIMOS 31
3.9.5
Simulação - controlador por inovações
O controlador dual por inovações foi proposto por Milito e Cadorin (1982). A Fi-gura 3.5 apresenta os resultados do controlador para a mesma realização dos demais. É importante salientar que nesse controlador existe um parâmetro ajustável λ cujo valor
inicial e ótimo é obtido a partir de conhecimento do sistema e/ou testes com a planta. Nessa simulação o valor de λ foi 0,85, ou seja, um valor de λ próximo a 1 reflete
um compromisso maior com o controlador equivalente à certeza. Foram realizados testes com diversos valores deλentre 0 e 1 para analisar os resultados da entrada, da matriz de
variância e das perdas acumuladas. Esses testes comprovaram a necessidade de exaustivas simulações a fim de identificar e calibrar um valor deλmais propício para o sistema.
32 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
3.9.6
Simulação - controlador por bicritério
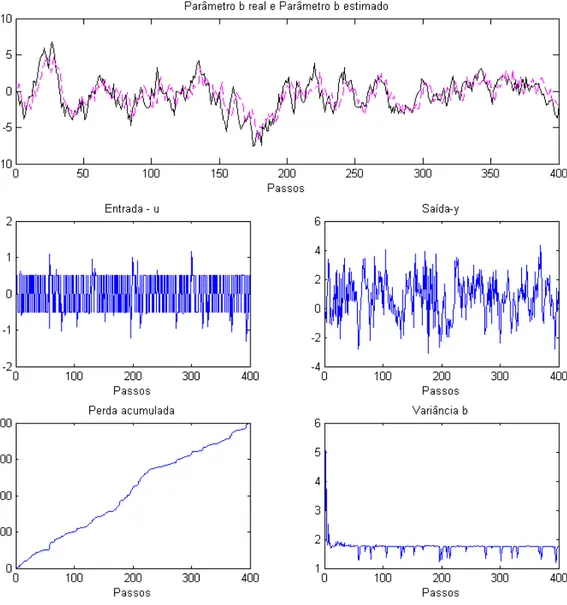
A Figura 3.6 apresenta os resultados da simulação para o controlador subótimo por bicritério - BDC (3.7). Assim como os controladores anteriormente apresentados, esse controlador possui a necessidade que algumas definições sejam realizadas por parte do usuário como por exemplo, uma função da matriz de variância necessária para definir o intervalo da segunda minimização realizada. Nesse exemplo, utilizamos a seguinte função
f(P) =ηtrace(P) (3.38)
onde η=0,095 representa um parâmetro linear fixo também definido pelo usuário. A
escolha desse parâmetro, bem como da função utilizada, é bastante subjetiva e os seus valores são calibrados melhor experimentalmente. Outra função também avaliada foi
f(P) =
η1trace(P) +η2(λI+P)−1
(3.39) ondeη1,η2eλsão maiores que zero e também definidos pelo usuário.
3.9.7
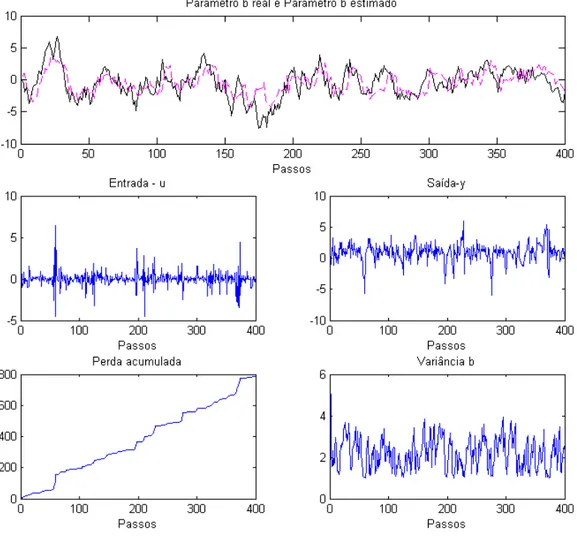
Simulação - Controlador dual subótimo ativo aproximado
A Figura 3.7 exibe os resultados do controlador para as mesmas condições dos con-troladores anteriores. É válido ressaltar que esse controlador possui um parâmetroλ
con-figurado pelo usuário. Não existe um procedimento para definir o valor ótimo para essa variável.
Nessa simulação o valor deλ foi de 0.5. Para este exemplo, esse controlador
3.9. SIMULAÇÕES - CONTROLADORES DUAIS SUBÓTIMOS 33
34 CAPÍTULO 3. CONTROLADORES DUAIS SUBÓTIMOS
3.10. CONCLUSÃO 35
3.9.8
Simulação Monte Carlo
Os resultados das 300 simulações são apresentadas na Tabela 3.1. A tabela contém os cálculos da perda média por passo ¯V, o desvio padrãoσve o valor médio da variância do
parâmetro ¯pb.
Esta tabela ilustra um indicativo do desempenho dos controladores analisados. Entre-tanto, esta tabela não constitui um argumento convincente para classificar e comparar dois ou mais algoritmos a fim de determinar o melhor controlador. Existem testes estatísticos, como em Wenk e Bar-Shalom (1979) e Lindoff, Holst e Wittenmark (1999), que realizam este procedimento.
Tabela 3.1: Os resultados da simulação de Monte Carlo para o sistema 3.30. Lei de Controle V¯ σv p¯b
Cauteloso 2.8757 0.5884 4.4558 Restrições 2.5078 0.4155 3.7508 Inovações 1.6111 0.5194 2.7983 Bicritério 2.5313 0.3932 3.0386 ASDA 0.7987 0.1724 2.0377
3.10
Conclusão
Capítulo 4
Controlador Proposto
Nos capítulos anteriores foram apresentados vários controladores duais subótimos que aproveitam a simplicidade do controlador cauteloso, adicionando limitações para o sinal de controle ou funções da qualidade da estimativa dos parâmetros. Tais controladores possuem a vantagem que o sinal de controle pode ser facilmente calculado, entretanto seus algoritmos contêm parâmetros dependentes da aplicação e que devem ser escolhidos pelo usuário.
O fator de pesoλpresente na função de custo de algum controlador deve ser escolhido
antecipadamente. A escolha de um valor muito pequeno pode levar ao fenômeno do desligamento do sinal de controle(turn-off), pois a estimação será pouco considerada. Já a escolha de um valor muito elevado pode fazer com que o controlador invista muito na estimação e pouco na função básica que é a de controlar o sistema. A escolha de um λ
fixo adequado pode envolver exaustivas simulações do sistema.
Neste capítulo apresentaremos o controlador dual subótimo com fator de peso variável como uma alternativa simples e natural para simplificar a utilização e a eficiência do controlador. É proposto um algoritmo adaptativo para realizar o cálculo do fator de peso
λ, a cada passo.
Em virtude da interferência das variáveis estocásticas no sistema (parâmetros e ruí-dos), o propósito do fator de peso variável é possibilitar que o controlador esteja suscetível a estas variações, a fim de realizar um melhor controle e uma melhor estimação. Os efei-tos destas alterações são analisados e discutidos. Finalmente, a formulação e o algoritmo do controlador dual subótimo com fator de peso variável para sistemas com parâmetros estocásticos desconhecidos e variantes no tempo é deduzido.
4.1
Controlador dual subótimo com fator de peso
λ
va-riável
Esta tese sugere um controlador dual subótimo com um fator de pesoλvariável com
o tempo, cuja função de custo é dada por:
JASODFPV (uk) = E{(y(k+1)−yr(k+1))2
38 CAPÍTULO 4. CONTROLADOR PROPOSTO
em que λ(k)consiste em um parâmetro definido a cada passo a fim de ponderar a
exa-tidão dos parâmetros estimados. A função de custo (4.1) consiste em uma alteração no controlador ASOD proposto por Wittenmark (1975a), dado por (3.5).
A solução proposta pretende melhorar o desempenho do sistema minimizando a va-riância da saída um passo adiante e, ao mesmo tempo, garantir boas estimativas. Caso as estimativas geradas sejam boas, então o controlador proporcionará boas ações de con-trole. Porém, se as estimativas estiverem deficientes, o controlador precisa realizar um esforço para melhorar as estimativas no momento presente para melhorar o controle nos passos futuros.
A minimização da função de custo (4.1) é realizada mediante uma expansão serial de segunda ordem mantendo somente termos lineares e quadráticos em u(k), conforme
proposto por Wittenmark e Elevitch (1985). Como o controlador possui um fator de peso variável, as variações proporcionadas pelas variáveis estocásticas serão levadas em consideração a cada passo, a fim de balancear melhor a dualidade do controlador. Isto resultará em um controle global melhor, devido a característica dual no sinal de controle a cada passo ser proporcional a precisão do estimador. O sinal de controle deve sempre ter um compromisso com um bom controle e uma boa estimação.
A estratégia do controlador proposto, resumidamente, consiste no cálculo, a cada passo, de diversos sinais de controle u(k) associados a diferentes fatores de peso λ(k).
A partir deste cálculo, ocorre uma seleção do sinal de controle mais adequado para aquele passo. Um dos pontos mais importante no algoritmo resulta na maneira de descobrir qual fator de pesoλ(k)concebeu o melhor sinal de controle naquele passo.
Inicialmente o controlador necessita definição dos fatores de pesoλassociado ao
sis-tema. Não existe um limite na quantidade de fatores lambdas criados. O desempenho em termos de tempo de processamento do controlador pode ser prejudicado caso o número de fatores lambdas seja excessivo. Por outro lado, quanto mais fatores de lambdas definidos, melhor será o ajuste do sinal de controle a cada passo.
Uma vez definido os fatores de peso, controlador realizará a cada passo os cálculos para obter um sinal de controle associado para cada fator de peso lambda. Ou seja, a cada passo existirá um conjunto de N pares de fator de peso versus sinal de controle. A partir desse conjunto, é definido uma estratégia para selecionar o sinal de controle mais adequado para aquele passo de modo que realize um bom controle no instante atual bem como excite a planta suficientemente para produzir boas estimativas e, consequentemente, um bom controle nos passos adiante.
A seleção do sinal de controle apropriado para cada instanteké basedo nas seguintes informações: o vetor de estimação ˆx(k+1), o vetor de ganho de KalmanK(k+1), a va-riância do vetor de parâmetros do ruídoCv(k)e o sinal de controle equivalente à certeza
uce(k). Ou seja, cada conjunto de fator de peso versus sinal de controle interpreta todos