Controle Preditivo Robusto baseado em Desigualdades
Matriciais Lineares aplicado a um Sistema de Tanques
Acoplados
José Soares Batista Lopes
Orientador: Prof. D.Sc. Anderson Luiz de Oliveira Cavalcanti
Natal - RN Fevereiro de 2011
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA
i
Controle Preditivo Robusto baseado em Desigualdades
Matriciais Lineares aplicado a um Sistema de Tanques
Acoplados
José Soares Batista Lopes
Orientador: Prof. D.Sc. Anderson Luiz de Oliveira Cavalcanti
Natal - RN Fevereiro de 2011
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO
Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em
Engenharia Elétrica e de Computação –
PPGEEC – da Universidade Federal do
Rio Grande do Norte – UFRN (área de
ii
Controle Preditivo Robusto baseado em Desigualdades
Matriciais Lineares aplicado a um Sistema de Tanques
Acoplados
José Soares Batista Lopes
Dissertação de Mestrado aprovado em 14 de fevereiro de 2011 pela banca examinadora composta pelos seguintes membros:
Prof. D.Sc. Anderson Luiz de Oliveira Cavalcanti – UFRN - Orientador
Prof. Dr. André Laurindo Maitelli – UFRN – Examinador Interno
Prof. Dr. Carlos Eduardo Trabuco Dorea – UFRN – Examinador Externo
Prof. Dr. Oscar Gabriel Filho – UnP – Examinador Externo
iii
AGRADECIMENTOS
Agradeço a Deus em primeiro lugar por ter iluminado meu caminho e guiado meus passos, proporcionando a concretização desta etapa tão importante da minha vida.
Aos meus pais João Batista Lopes e Maria da Glória Soares Lopes pelo exemplo de amor, honestidade, humildade, dedicação e por sempre acreditarem em mim.
Ao meu irmão Gilson Soares Lopes pelo apoio.
A minha esposa Ana Cristina da Silva Lopes, pelo amor, paciência, apoio e compreensão nessa jornada.
Ao meu amado filho João Vinícius Silva Lopes, pela alegria e paz que transmite em todos os instantes.
Ao meu orientador Prof. D.Sc. Anderson Luiz de Oliveira Cavalcanti, pela
amizade, competência, compreensão e dedicação com que me conduziu na elaboração deste trabalho.
Aos professores André Maitelli, Fabio Meneghetti, Luiz Affonso, Oscar Gabriel pela amizade, apoio e incentivo à pesquisa.
Aos demais professores do Programa de Pós-Graduação em Engenharia Elétrica e de computação da UFRN, pelo aprendizado, solidariedade e amizade.
iv
SUMÁRIO
AGRADECIMENTOS ... iii
SUMÁRIO ... viiv
LISTA DE FIGURAS ... iii
LISTA DE ABREVIATURAS ... x
LISTA DE SIMBOLOS ... xi
RESUMO... xiv
ABSTRACT ... xv
Capitulo 1 ... 1
Introdução ... 1
1.1 Contextualização e Revisão bibliográfica ... 1
1.2 Delimitações e Objetivos do Trabalho ... 4
1.3 Organização do Texto ... 5
Capitulo 2 ... 6
Fundamentos Teóricos ... 6
2.1 Introdução ... 6
2.2 Sistemas Incertos ... 6
2.3 Incerteza Politópica... 8
2.4 LMIs ... 9
2.5 Estrutura de uma LMI ... 9
2.6 Complemento de Schur ... 10
2.7 Problema de Otimização Associado às LMIs ... 11
2.8 Conclusão ... 12
Capitulo 3 ... 13
Formulação do Controlador Preditivo Robusto baseado nas Desigualdades Matriciais Lineares ... 13
3.1 Introdução ... 13
3.2 Notação adotada ... 13
3.3 Formulação do Controlador Preditivo Robusto (RMPC) ... 13
3.4 Formulação do RMPC baseado em LMI com restrição ... 19
3.4.1 Restrição no sinal de controle ... 19
3.4.2 Restrição na saída ... 20
3.5 Conclusão ... 20
Capitulo 4 ... 22
v
4.1 Introdução ... 22
4.2 Modelagem da Planta ... 22
4.3 Parâmetro incerto ... 24
4.4 – Caso 1: Sistema Não-Linear de 1º Ordem ... 25
4.4.1 – Resultados simulados do RMPC sem perturbação e sem restrições ... 26
4.4.2 - Resultados simulados do RMPC com perturbação e sem restrições ... 28
4.4.3 - Resultados simulados do RMPC com perturbação e com restrições ... 30
4.5 – Caso 2: Sistema Não-Linear de 2º Ordem ... 32
4.5.1 - Resultados simulados do RMPC sem perturbação e sem restrições ... 33
4.5.2 - Resultados simulados do RMPC com perturbação e sem restrições ... 35
4.5.3 - Resultados simulados do controlador RMPC com perturbação e com restrições ... 37
4.6 Conclusão ... 38
Capitulo 5 ... 39
Descrição da Planta Fisica ... 39
5.1 Introdução ... 39
5.2 Sistema Hidráulico e o módulo de Potência ... 40
5.3 Kit de treinamento ZTK 900 ... 41
5.4 Implementação da Estratégia de Controle ... 43
5.5 Módulo de Comunicação OPC(OLE for Proces Control) ... 43
5.6 Conclusão ... 44
Capitulo 6 ... 45
Resultados dos Experimentos na Planta Fisica ... 45
6.1 Introdução ... 45
6.2 Resultados dos Experimentos ... 46
6.3 Sistema não-linear de 1º ordem ... 47
6.3.1 Situação 1 - Resultados experimental do RMPC sem perturbação e sem restrições ... 47
6.3.2 Situação 2 - Resultados experimental do RMPC com perturbação e sem restrições ... 48
6.3.3 Situação 3 - Resultados experimental do RMPC com perturbação e com restrições ... 50
6.4 Sistema não-linear de 2º ordem ... 51
vi
6.4.2 Situação 2: Resultados experimental do RMPC com
perturbação e sem restrições ... 53
6.4.3 Situação 3: Resultados experimental do RMPC sem perturbação e com restrições ... 57
6.4.3.1 Restrição imposta na código do programa ... 57
6.4.3.2 Restrição incorporada na forma de LMI ... 57
6.5 Conclusão ... 61
Capitulo 7 ... 62
Conclusões e Perspectivas ... 62
vii
LISTA DE FIGURAS
Figura 2.1 - Representação Gráfica da incerteza politópica. Fonte: Artigo do Kothare, M.V.; Balakrishnan, V.; Morari, M., 1996. ... 8 Figura 4.1 – Sistema de Tanques da Quanser. ... 22 Figura 4.2 – Configuração do Sistema de Tanques . ... 23 Figura 4.3 - Saída do sistema não-linear de 1ª ordem sem perturbação e sem restrição... 27 Figura 4.4 - Sinal de controle do RMPC para a incerteza no Km = 4,14 sem perturbação e sem restrição. ... 28 Figura 4.5 - Comportamento do sistema não-linear de 1ª ordem para a
incerteza no Km=5,06 sem perturbação e sem restrição.. ... 28 Figura 4.6 - Sinal de controle do RMPC para a incerteza no Km=5,06 sem perturbação e sem restrição. ... 28 Figura 4.7 - Comportamento do sistema não-linear de 1ª ordem com
perturbação e sem restrição.. ... 29 Figura 4.8 - Sinal de controle com incerteza no Km=4,14 e perturbação do tipo pulso e sem restrição. ... 29
Figura 4.9 – Comportamento do sistema não-linear de 1ª ordem com
perturbação e sem restrição. ... 29 Figura 4.10 - Sinal de controle com incerteza no Km=5,06 com perturbação do tipo pulso e sem restrição... 30 Figura 4.11 - Comportamento do sistema não-linear de 1ª ordem com
perturbação e com restrição (Km=4,14). ... 30 Figura 4.12 - Sinal de controle do RMPC com perturbação e com restrição de 15 volts e km=4,14. ... 31 Figura 4.13 - Comportamento do sistema não-linear de 1ª ordem com
perturbação e com restrição (Km=5,06) ... 31
Figura 4.14 – Sinal de controle com perturbação e com restrição de 15 volts. 32
viii
Figura 4.17 - Gráfico do sinal de controle do RMPC com Km=4,14 sem
perturbação e sem restrição.. ... 35
Figura 4.18 - Nível do tanque 1 do sistema não-linear de 2ª ordem com uma perturbação e sem restrição (km=4,14). ... 35
Figura 4.19 - Nível do tanque 2 do sistema de 2ª ordem com uma perturbação do tipo pulso e sem restrição.. ... 36
Figura 4.20 - Gráfico do sinal de controle do RMPC com perturbação e sem restrição com Km=4,14. ... 36
Figura 4.21 - Nível do tanque 1 do sistema não-linear de 2ª ordem com perturbação e restrição.. ... 37
Figura 4.22 – Nível do tanque 2 do sistema de 2ª ordem com perturbação do tipo pulso e com restrição... 37
Figura 4.23– Gráfico do sinal de controle do RMPC com perturbação e com restrição de 15 volts. ... 38
Figura 5.1– Estrutura Física. ... 39
Figura 5.2 – Sistema de Tanques da Quanser. ... 40
Figura 5.3 – Módulo amplificador UPM 2405-240. ... 40
Figura 5.4 – Painel do kit de treinamento ZTK 900. ... 41
Figura 5.5 – Acoplamento entre o módulo amplificador e o kit de treinamento ZTK 900... 402
Figura 5.6 – Estrutura do padrão OPC. ... 44
Figura 6.1 – Resposta do sistema de 1ª ordem não-linear sem perturbação e sem restrição. ... 47
Figura 6.2 – Sinal de controle do RMPC para o sistema de 1ª ordem não-linear sem perturbação e sem restrição. ... 48
Figura 6.3 – Resposta do sistema de 1ª ordem não-linear com perturbação e sem restrição. ... 49
Figura 6.4 – Sinal de controle do RMPC para o sistema 1ª ordem com perturbação e sem restrição. ... 49
Figura 6.5 – Resposta do sistema de 1ª ordem não-linear com perturbação e com restrição.. ... 50
ix
Figura 6.7 – Resposta do sistema de 2ª ordem (tanque 1) não-linear sem
perturbação e sem restrição.. ... 51
Figura 6.8 – Resposta do sistema de 2ª ordem (tanque 2) não-linear sem
perturbação e sem restrição ... 52
Figura 6.9 – Sinal de controle do RMPC para o sistema de 2ª ordem sem
pertrurbação e sem restrição... 52
Figura 6.10 – Resposta do sistema de 2ª ordem (tanque 1) não-linear com
perturbação e sem restrição. ... 53
Figura 6.11 – Resposta do sistema de 2ª ordem (tanque 2) não-linear com
perturbação e sem restrição. ... 54
Figura 6.12 – Sinal de controle do RMPC para o sistema de 2ª ordem nõ-linar
com perturbação e sem restrição. ... 54
Figura 6.13 – Reposta do sistema de 2ª ordem (tanque 1) não-linear com
perturbação e sem restrição. ... 55
Figura 6.14 – Resposta do sistema de 2ª ordem (tanque 2) com perturbação e
sem restrição. ... 56
Figura 6.15 – Sinal de controle do RMPC para o sistema de 2ª ordem
não-linear com perturbação e sem restrição ... 56
Figura 6.16 – Resposta do sistema de 2ª ordem (tanque 1) com perturbação e
com restrição. ... 57
Figura 6.17 – Resposta do sistema de 2ª ordem (tanque 2) não-linear com
perturbação e sem restrição. ... 58
Figura 6.18 – Sinal de controle do RMPC para o sistema de 2ª ordem
não-linear com perturbação e com limitante de 10 volts. ... 58
Figura 6.19 – Resposta do sistema de 2ª ordem (tanque 1) não-linear sem
perturbação e com restrição na forma de LMI. ... 59
Figura 6.20 – Resposta do sistema de 2ª ordem (tanque 2) não-linear sem
perturbação e com restrição na forma de LMI. ... 60
Figura 6.21 – Sinal de controle do RMPC para o sistema de 2ª ordem
x
LISTA DE ABREVIATURAS
MPC Controlador Preditivo Baseado em Modelo (Model Based
Predictive Controllers)
RMPC Robust Model Based Predictive Control
LMI Linear Matrix Inequalities
IH-MPC Infinite Horizon Model Predictive Control
Max Maximização
Min Minimização
AD/DA Analógico-Digital / Digital-Analógico
CLP Controlador Lógico Programável
SDP Semidefine Programation
Convex Hull
xi
LISTA DE SIMBOLOS
Número de entradas e de saídas da planta
Ordem do sistema
Instante de amostragem atual
Módulo
Norma euclidiana
Função quadrática da variável
Matriz de estado, matriz de entrada, matriz de saída, matriz de transmissão direta do modelo discreto
Matrizes do modelo discreto variante no tempo
Matriz simétrica positiva definida
Constante escalar definida entre
Função custo minimizado durante um horizonte de predição infinito
Vetor real de dimensão apropriada do problema de minimização
Função de custo minimizada durante o horizonte de predição
Matrizes que representam os vértices do modelo discreto sujeito a incerteza politópica
Número de vértices de um politopo
Vetor de parâmetros incertos
Ação de controle aplicado no instante
Variável controlada no instante
Sinal de referência no instante
xii
nas medidas no instante
Saída do sistema no instante preditos com base
nas medidas no instante
Sinal de controle do sistema no instante preditos
com base nas medidas no instante
Limite superior do módulo da j-ésima componente do
vetor de entrada do sistema
Módulo da j-ésima componente do vetor de entrada do
sistema
Limite superior do módulo da j-ésima componente do
vetor de saída do sistema
Módulo da j-ésima componente do vetor de saída do
sistema
Matrizes simétricas de ponderação da função de custo
Politopo convexo
Variável escalar do problema de minimização
Matrizes resultantes da solução de um problema de minimização
Matriz de realimentação de estados para o elipsóide
Matriz identidade de ordem por ou simplesmente matriz identidade de ordem
Matriz de zeros de ordem por ou simplesmente
matriz de zeros de ordem
Elipsóide invariante para um sistema incerto
Sinal de controle máximo
Níveis do tanque 1 e tanque 2 respectivamente
Áreas das bases dos tanques 1 e 2
Orifício de saída do tanque pequeno, médio e grande
xiii
Constante da bomba
Tensão máxima admitida
xiv
RESUMO
Este trabalho tem como objetivo desenvolver uma estratégia de controle on-line
baseado no Controlador Preditivo Robusto (RMPC, acrônimo do inglês Robust
Model Predictive Control) aplicado a um sistema real de tanques acoplados. Este processo consiste em sistema de dois tanques conectados, cujo liquido é
enviado aos mesmos por uma bomba. O objetivo do controle (problema
regulatório) é deixar os níveis dos tanques no ponto de operação considerado, mesmo na presença de perturbações. A síntese da técnica RMPC consiste em incorporar de forma explicita as incertezas da planta na formulação do problema. O objetivo do projeto, a cada período de amostragem, é encontrar uma realimentação de estados que minimiza o pior caso de uma função objetivo com horizonte infinito, sujeita a restrições no sinal de controle. O problema original, do tipo Min-max, é reduzido em a problema de otimização
convexa expresso em desigualdades matriciais lineares (LMI, Linear Matriz
Inequalities). Mostram-se, neste trabalho, a descrição da incerteza da planta na forma politópica e as condições de factibilidade do problema de otimização. A implementação do algoritmo RMPC foi feita utilizando o software Scilab e a sua comunicação com o sistema de tanques acoplados foi feita através do
protocolo OPC (do inglês OLE for Process Control).
Palavras-Chave: Controlador Preditivo Robusto, Desigualdades Matriciais Lineares, Incerteza Politópica, Sistema de Tanques Acoplados, Controlador
xv
ABSTRACT
This work deals with an on-line control strategy based on Robust Model Predictive Control (RMPC) technique applied in a real coupled tanks system. This process consists of two coupled tanks and a pump to feed the liquid to the system. The control objective (regulator problem) is to keep the tanks levels in the considered operation point even in the presence of disturbance. The RMPC is a technique that allows explicit incorporation of the plant uncertainty in the problem formulation. The goal is to design, at each time step, a state-feedback control law that minimizes a 'worst-case' infinite horizon objective function, subject to constraint in the control. The existence of a feedback control law satisfying the input constraints is reduced to a convex optimization over linear matrix inequalities (LMIs) problem. It is shown in this work that for the plant uncertainty described by the polytope, the feasible receding horizon state feedback control design is robustly stabilizing. The software implementation of the RMPC is made using Scilab, and its communication with Coupled Tanks
Systems is done through the OLE for Process Control (OPC) industrial protocol.
Keywords: Robust Model Predictive Control, Linear Matrix Inequalities,
1
Capítulo 1
Introdução
1.1 Contextualização e Revisão bibliográfica
A teoria de controle preditivo baseada em modelos (MPC, Model Based
Predictive Controllers) teve origem no final da década de 1970 e
desenvolveu-se de forma considerável desde então (CAMACHO E. F.; BORDONS, C., 1998, ROSSITER, J. A., 2003). Existem hoje muitas aplicações com sucesso dessa
técnica, não só na indústria química como em outras áreas (SILVA, C. H. F. et
al., 2007).
O MPC é caracterizado pela utilização do modelo do processo, a fim de prever as saídas do mesmo em um tempo futuro e calcular uma seqüência de ações de controle que minimizem uma função objetivo, com a aplicação da primeira ação de controle da seqüência calculada e a atualização das medidas dos sinais de saídas para a realização de novos cálculos de minimização (TSANG, T. T. C., CLARK, D. W, 1988; CAMACHO E. F.; BORDONS, C., 1998;
MACIEJOWSKI, J. M., 2002; SILVA, C. H. F. et al., 2007).
Capítulo 1. Introdução 2
A técnica de controle MPC tem recebido muita atenção devido às suas muitas vantagens, mas, de acordo com Bemporad, A. e Morari. M. (1999), é necessário investigar melhor os problemas de i) garantia de factibilidade do problema de otimização e ii) a garantia de estabilidade e robustez, pois o uso de restrições terminais na formulação da lei de controle preditivo, forma como geralmente é garantida a estabilidade, acarreta em problemas nas situações reais.
As questões de estabilidade e robustez estão fortemente ligadas ao tratamento de incertezas no modelo da planta, pois a diferença entre a saída da planta real e do modelo nominal utilizado na predição leva a uma situação em que a otimização associada ao controlador preditivo não possui solução, por não ser possível respeitar todas as restrições simultaneamente. Esse descasamento entre o modelo e a planta devido ao desgaste dos componentes da planta ou mesmo da ocorrência de falhas, por exemplo, pode degradar o desempenho do controlador (ROSSITER, J. A. 2003).
Para contornar esses problemas, de acordo com Pascoal, R. M. (2010), esforços têm sido concentrados para a análise das propriedades de robustez de algumas técnicas de MPC existentes e no desenvolvimento de mecanismos para obtenção de garantia de estabilidade robusta. Segundo Weinmann, A. (1991), o MPC não é um novo método de projeto de controle. Ele essencialmente resolve problemas de controle ótimo padrão. O que o diferencia é o fato de que, no MPC, o problema de controle ótimo requerido possui horizonte finito, em contraste com o horizonte infinito, usualmente
empregado nos controladores ótimos lineares H2 e H∞.
Segundo Maia, M. H. (2008), a partir da década de 1990, diversas propostas de formulação de leis de controle preditivo robustos começaram a surgir na literatura, enfocando tanto incertezas de modelo quanto perturbações. Em geral, as formulações de MPC consideram um simples modelo linear e invariante no tempo para descrever a planta. Essa formulação gera um sinal de controle que pode resultar em um desempenho pobre quando implementado em um sistema físico que não seja exatamente descrito pelo modelo. Esse fato levou Campo, P. J e Morari, M., (1987) a modificarem a formulação de um
problema de otimização on-line aplicado a uma simples planta em um problema
Capítulo 1. Introdução 3
robusta, assim chamado algoritmo Min-max, foi descrito por vários autores ( GARCIA, CE., PRETT, D. M., 1998; CAMPO, P. J., MORARI, M., 1987; LEE, J. H., YU, Z.H. 1994, WU, F. 1997). Aplicações do problema Min-max podem ser
encontradas em Lee, J. H., Yu, Z.H (1994) e em Alamo, T. et al. (2007).
Nesse método, uma função custo minimiza o pior caso de uma função de custo que considera as incertezas da planta. Como obstáculos dos algoritmos de MPC robusto podemos citar o custo computacional e a aplicabilidade a depender da velocidade e dimensão da planta sobre a qual o controle atuará. Nesse aspecto, Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996) utilizaram a formulação em Desigualdades Matriciais Lineares (LMIs,
Linear Matrix Inequalities) para resolver o problema de otimização.
A idéia básica das LMIs é interpretar um dado problema de controle como um problema de programação semidefinida (SDP), ou seja, um problema de otimização com objetivo linear e restrições positivas semi-definidas
envolvendo matrizes simétricas que são afim nas variáveis de decisão.
Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996) desenvolveram essa técnica
de controle e chamaram de RMPC (Robust Model Predictive Control). O RMPC
incorpora uma ampla classe de incertezas, uma vez que a principal deficiência no projeto de técnicas de MPC é sua falta de habilidade em lidar explicitamente com incertezas no modelo da planta.
Segundo Cannon, M. e Kouvaritakis, B. (2005), o esforço computacional é o fator principal limitante do número de aplicações na indústria. A fim de superar esse obstáculo, a aplicação das desigualdades lineares (LMI) tem se mostrado promissor em Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996).
Em Wan, Z; Kothare, M. V. (2003), os autores afirmam que os resultados obtidos em Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996) podem ser utilizados para obter uma formulação de MPC robusto que envolve a
determinação off-line (ou seja, antes da implementação do controlador em
Capítulo 1. Introdução 4
Pascoal, R. M. (2010) emprega essa técnica em um helicóptero didático de três graus de liberdade.
Aplicações práticas, por exemplo, em um reator de polimerização foram realizadas por Park. M. J. e Rhee, H. K. (2001). Wu, F. (2001) trabalhou com a classe de sistemas incertos para modelagem de plantas não-lineares e aplicou a técnica em um tanque reator da indústria.
Em 2002, Cuzzola, F. A., Geromel, J. C., Morari, M. utilizaram funções de Lyapunov nos vértices do politopo do sistema incerto com o objetivo de reduzir o conservadorismo. O trabalho de Chang, X. e Liu, H. (2009) utiliza as funções de Lyapunov em sistemas com realimentação de saída.
Pannocchia, G. (2004) desenvolveu uma técnica para remover o Off-set
de possíveis origens diferentes (set points) para sistemas lineares invariantes
no tempo, através de uma ação integral no projeto do controlador RMPC.
Zhijun, Li et al. (2008) desenvolvram uma estrutura de controle com dois
estados lineares realimentando o controlador do sistema alternativamente para reduzir o conservadorismo e tornar o problema de otimização tratável. De
acordo com Ding, B. et al. (2008), a lei de controle off-line baseada em estados
garante as restrições de entrada e saída dos estados da planta, pois quando
aplicado no sistema on-line, a cada período de amostragem é escolhida uma
seqüência apropriada para ser aplicado.
1.2 Delimitações e Objetivos do Trabalho
No presente trabalho a formulação proposta em Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996), baseada em LMIs, foi aplicada a um
sistema real de tanques acoplados de 2ª ordem da Quanser Consulting. Os
algoritmos foram implementados no Scilab (Scientific Laboratory) e o pacote
LMITool foi utilizado para resolver as LMIs. Com este trabalho foi avaliada, no que concerne a estabilização e a rejeição de perturbações, a aplicação do
algoritmo on-line RMPC desenvolvido para um sistema real de tanques.
1.3 Organização do Texto
Capítulo 1. Introdução 5
capítulo 2 apresenta os fundamentos sobre estabilidade, incertezas e
desigualdades matriciais lineares(LMIs);
capítulo 3 descreve a formulação da estratégia de controle preditivo
robusto (RMPC) empregada nesse trabalho e sua formulação com restrição na variável manipulada;
capítulo 4 descreve alguns resultados preliminares simulados;
capitulo 5 descreve a estrutura física empregada para os experimentos na
planta;
capítulo 6 descreve os resultados dos experimentos na planta física e, por
último,
Capítulo 3. RMP 6
Capítulo 2
Fundamentos Teóricos
2.1 Introdução
Este capítulo discorre, de forma sintética, sobre o conceito de sistemas incertos, incertezas politópicas, desigualdades matriciais lineares e comenta sobre alguns pacotes computacionais utilizados na resolução de problemas de otimização numérica. Os fundamentos teóricos mostrados neste capítulo são a
base para o controlador desenvolvido neste trabalho, o Robust Model
Predictive Control (KOTHARE, M.V.; BALAKRISHNAN, V.; MORARI, M. 1996).
2.2 Sistemas Incertos
Segundo Gustafsson, T. K.; Mäkilä, P. M. (2001), a modelagem de sistemas incertos e a qualidade de modelos estimados para o controle têm sido tópico de intensa pesquisa durante os últimos anos.
A definição da incerteza exige conhecimento do processo e integração com a estrutura do controlador que se pretende utilizar. No entanto, todo modelo matemático é na verdade uma aproximação do sistema físico real e quanto melhor o modelo matemático utilizado, mais eficiente será o esquema de controle baseado nesse modelo (WANG, Y. 2002). Contudo, a complexidade do modelo matemático está diretamente ligada à representação física real dos processos, o que dificulta sua representação e, conseqüentemente, gera incertezas no mesmo.
Segundo Trofino, A.; Coutinho, D.; Barbosa, K. C. (2003), o modelo matemático obtido pode apresentar diferentes tipos de incertezas, como
parâmetros de modelo linear aproximados com erro (decorrentes de
Capítulo 2. Fundamentos Teóricos 7
parâmetros do modelo linear variando, devido à característica não linear
dos sistemas reais associados com o ponto de operação;
imperfeições na medida ou a existência de ruídos,
escolha indevida de modelos mais simples negligenciando dinâmicas
como incertezas.
De acordo com Skogestad, S; Postlethwaite, I (1997), as incertezas em muitos sistemas reais não são possíveis e/ou convenientes de serem modeladas com exatidão, ou seja, considerando todas as dinâmicas do mesmo. Assim, os modelos matemáticos utilizados para descrever as dinâmicas de sistemas incertos representam de forma simplificada os fenômenos que dificilmente poderiam ser representados com exatidão, seja porque o modelo completo seria muito complexo, ou devido à dificuldade de se conhecer e obter modelos que representem todos os fenômenos que ocorrem na prática.
Existem dois tipos de incertezas envolvidas na modelagem de sistemas dinâmicos: as incertezas estruturadas e as não estruturadas. As incertezas são consideradas como não estruturadas quando a ordem e outras características do modelo utilizado para representar o processo podem variar de tal forma que não há a possibilidade de representá-lo por um único modelo com parâmetros variáveis. As incertezas estruturadas ocorrem quando a estrutura do modelo é conhecida e apenas seus parâmetros são incertos. Este trabalho considera apenas incertezas estruturadas, ou seja, apenas os parâmetros do modelo são desconhecidos.
Um grande problema ao se trabalhar com sistemas incertos está em como tratar a incerteza na formulação final do problema, pois, dependendo do tipo de incerteza, pode-se inserir mais restrições na busca de solução do problema. Existem diferentes formas de se modelar um sistema incerto. Doyle,
J. C.; Packard, A.; Zhou, K. (1991) apresentam um tutorial sobre Linear
Frational Transformation (LFT) e LMIs para várias aplicações do controle clássico e moderno envolvendo incertezas.
Capítulo 2. Fundamentos Teóricos 8
2.3 Incerteza Politópica
Uma maneira de especificar incertezas é definir regiões nas quais os parâmetros que definem o modelo estejam contidos. Uma forma usual de se caracterizar as incertezas é verificar as matrizes A e B do modelo definido abaixo
(2.1)
em que é o vetor de entradas de controle, é o vetor de
estados da planta e é o vetor de saídas da planta. As notações
e denotam que as matrizes do modelo podem mudar a cada
instante de amostragem, embora não signifique que sua variação com o tempo seja conhecida (como uma função de ).
Desta forma, tem-se a configuração de um modelo incerto associado
(2.2)
em que representa o politopo convexo obtido através da descrição de incertezas politópicas. Sabemos que em um conjunto convexo definido por uma região limitada pelos vértices, Figura 2.1,
Figura 2.1 - Representação Gráfica da incerteza politópica. Fonte: Artigo do Kothare, M.V.; Balakrishnan, V.; Morari, M., 1996.
teremos:
(2.3)
] , [AL BL
] , [A1 B1
] , [A2 B2
] , [Ai Bi
Capítulo 2. Fundamentos Teóricos 9
Em (2.3) é caracterizado um conjunto de modelos
correspondentes a diferentes condições operacionais do processo, representados na Figura 2.1. Uma característica importante de um politopo é a convexidade, isto é, qualquer ponto no interior deste conjunto pode ser representado pela soma convexa de um número finito de pontos chamados de vértices do politopo.
2.4 LMIs
Desigualdades Matriciais Lineares (LMIs, Linear Matrix Inequalities) são
ferramentas matemáticas amplamente aplicadas em teoria de controle. Seu surgimento provavelmente ocorreu há mais de cem anos com trabalhos de Lyapunov (SKOGESTAD, S.; POSTLETHWAITE, I., 2005). Segundo Silva, C.
H. F. da; Henrique, H. M.; Lopes, L. C. O.; Gomes, L. R. G.(2007), as técnicas
de LMI surgiram como uma potente ferramenta de análise em várias áreas da engenharia de controle, identificação de sistemas e projeto estrutural. A partir de então muitos resultados usuais da teoria de controle e sistemas estão sendo reescritos como LMIs.
Uma das principais vantagens das LMIs é que elas podem ser usadas para resolver problemas que envolvem muitas variáveis matriciais e, além disso, diversas estruturas podem ser impostas a essas variáveis. Outra vantagem das LMIs é que se constituem em um método flexível para resolver problemas de controle (DOYLE, J. C.; PACKARD, A.; ZHOU, K., 1996).
Em muitos casos, o uso das LMIs pode eliminar restrições associadas aos métodos convencionais e ainda auxiliar na generalização de alguns tipos de problemas. Freqüentemente os métodos associados às LMIs podem ser aplicados em casos nos quais os métodos convencionais falham ou não conseguem encontrar solução (CAMPOS, V. A. F. de. 2008).
2.5 Estrutura de uma LMI
Para uma dada matriz , definimos como a matriz transposta de e
( ) significa que a matriz simétrica tem que ser semi-definida
Capítulo 2. Fundamentos Teóricos 10
desigualdade ¸ significa que cada elemento do vetor é maior ou igual a
zero.
Uma LMI tem a seguinte estrutura:
(2.4)
sendo as variáveis e as matrizes simétricas ,
dadas. Uma das facilidades no uso de LMIs na teoria de controle é a existência de pacotes computacionais para a sua solução numérica de forma eficiente. Outro ponto de suma importância é que na abordagem LMI a busca de soluções para problemas mais complexos, principalmente quando há presença de elementos incertos, pode ser simplificada devido às propriedades de convexidade e linearidade.
2.6 Complemento de Schur
Um resultado importante para converter desigualdades convexas não-lineares em uma formulação LMI é o chamado complemento de Schur. O complemento de Schur é um resultado da Teoria de Matrizes que ajuda na transformação de inequações não lineares para a forma de LMI. Muitos dos resultados já existentes da teoria de controle são colocados na forma LMI pela aplicação desse resultado.
Lema 1– Complemento de Schur
Sejam matrizes de dimensões compatíveis, com
simétricas, e afim em , as desigualdades
(2.5)
Capítulo 2. Fundamentos Teóricos 11
(2.6)
A prova desse resultado pode ser vista em Boyd, S. et al. (1994) e
Vanantwerp. J. G.; Braatz, R. T. (2000).
2.7 Problema de Otimização Associado às LMIs
Um problema de otimização com desigualdades matriciais lineares
consiste em achar um factível (ou seja, achar tal que ) que
minimize (ou maximize) uma função convexa .
(2.7)
Com o surgimento de algoritmos de pontos interiores para a solução de
problemas de otimização convexa tornou-se possível solucionar
numericamente LMIs de forma mais rápida e eficiente. Maiores detalhes sobre esse assunto e outros problemas de otimização baseados em LMI são
encontrados em Boyd, S. et al. (1994). Segundo LEITE, J. S. V. et al. (2004), o
aparecimento dos pacotes computacionais especializados facilitou a resolução de problemas de controle em termos de desigualdades matriciais lineares. Desde então muitas pesquisas vêm sendo desenvolvidas para a criação ou melhora de pacotes computacionais para a solução de problemas de otimização convexa.
A solução de problemas pode ser caracterizada de duas formas:
– Problema de factibilidade LMI: busca uma solução qualquer que
satisfaça um conjunto de restrições na forma LMI.
– Problema de otimização: determina a solução ótima de uma função
custo sujeita a um conjunto de restrições na forma LMI.
Capítulo 2. Fundamentos Teóricos 12
TOH,K.C.,TODD, M.J., 2003), SeDuMi (STURM, J.F.,1999), o LMITOOL presente no Scilab e o Matlab que usa o Método Primal-Dual desenvolvido por Vandenberghe, L. e Boyd, S. (1994).
Os pacotes computacionais apresentam problemas na busca de sua solução como, por exemplo, mau condicionamento dos dados, capacidade de memória das máquinas e erros de precisão. Outro grande problema é o esforço computacional necessário para solucionar as LMIs. Nesta dissertação, adotou-se o LMITOOL do Scilab (LOPES, L. C. O., 2004) para a resolução numérica das LMIs.
2.8 Conclusão
13 Capítulo
Capítulo 3
Formulação do Controlador Preditivo Robusto baseado
nas Desigualdades Matriciais Lineares
3.1 Introdução
Nesta seção introduz-se a formulação do controlador RMPC baseado nas LMIs sem e com restrições, o qual é a essência deste trabalho. As restrições no sinal de controle e na saída são expressas na forma de LMIs. São mostradas neste capítulo também as condições de factibilidade do problema de otimização que garante a solução de otimização para todos os instantes de amostragens.
3.2 Notação adotada
Neste trabalho será utilizada a seguinte notação: denota o
estado predito para o instante , com base nas medidas realizadas no
instante ; denota a ação de controle no instante calculada
através da otimização de uma função de custo no instante ; e
referem-se respectivamente a medida do estado e da saída no instante .
3.3 Formulação do Controlador Preditivo Robusto (RMPC)
Considere-se o seguinte modelo representado pelo sistema linear variante no tempo na forma discreta (KOTHARE, M.V.; BALAKRISHNAN, V.; MORARI, M., 1996; MACIEJOWSKI, J. M., 2002):
Capítulo 3. RMPC 14
sendo que é o vetor de entradas de controle, é o vetor
de estados da planta e é o vetor de saídas da planta. As notações
e denotam que as matrizes do modelo podem mudar a cada
instante de amostragem, embora não signifique que sua variação com o tempo seja conhecida (como uma função de ). O conjunto representa o politopo
(3.2)
em que denota o envelope convexo, em que
correspondem aos vértices do referido politopo. A função custo é definida por
(3.3)
sendo que são matrizes de ponderação simétricas. Em
particular, considera-se o caso para o Controle Preditivo com Horizonte
de Predição Infinito (“IH-MPC –Infinite Horizon MPC”). O objetivo é a resolução
da otimização do problema “Mín-max” da equação (3.3), ou seja
(3.4)
Esse é um problema sujeita à dinâmica em que a maximização é realizada sobre o conjunto e corresponde à escolha de uma planta variante
no tempo que, se usada como modelo para as
predições, levará ao pior caso do valor da função custo dentre todas as plantas em .
A minimização é realizada de forma a obter a seqüência de ações de
controle presentes e futuras que minimizam esse valor de
pior caso. No entanto, esse problema não é computacionalmente tratável. Para contornar essa dificuldade, será obtido um limite superior para a função objetivo de desempenho robusto. Esse limite superior será então minimizado
considerando uma lei de controle da forma ,
Capítulo 3. RMPC 15
resultado de otimização. Para isso, considera-se a existência de uma função
quadrática , com , tal que o par e
corresponde ao modelo de incerteza da Equação (2.1), para qualquer , e que satisfaz a inequação (3.5).
(3.5)
Para que o valor da função objetivo de desempenho robusta seja finito,
deve-se ter , e assim .
Somando a inequação (3.5) de a , obtém-se:
(3.6)
Desde que a Inequação (3.5) assuma um conjunto de incertezas para qualquer modelo, podemos afirmar que
(3.7)
A inequação (3.7) resulta no limite superior da função objetivo robusta. Logo, o objetivo do algoritmo RMPC é sintetizar a cada período de amostragem
uma lei de controle que minimize superiormente a
função .
Dessa forma, obtida a seqüência futura de controle, apenas o primeiro sinal é aplicado ao processo, sendo os demais descartados. No instante seguinte uma nova medida dos estados é feita e todo o processo é repetido através da otimização e do cálculo da matriz obtendo a nova seqüência de controle. Observa-se, então, que a função de Lyapunov é um limitante superior
para a função de custo . Conseqüentemente, pode-se substituir o
problema em (3.4) por
Capítulo 3. RMPC 16
de forma que inequação (3.5) seja válida e que . O problema de
otimização mostrado em (3.8) é um problema de otimização convexo, o que possibilita sua resolução na forma de LMIs (MACIEJOWSKI, J. M. 2002). Resolver (3.8) é equivalente a solucionar o problema
(3.9)
sujeito a
(3.10)
no qual a solução de depende de Sabendo que então
define-se uma matriz como sendo,
(3.11)
Manipulando (3.11), obtém-se a equação (3.12)
(3.12)
Substituindo a equação (3.12) em (3.10), obtêm-se a equação (3.13)
(3.13)
Observe que a equação (3.13) pode ser escrita na forma de uma LMI utilizando o complemento de Schur. Quando comparada a inequação (2.6) com a inequação (3.13), obtêm-se
Capítulo 3. RMPC 17
Substituindo a lei de controle e o sistema em
espaço de estados na representação do modelo em (3.1) na inequação (3.5), obtêm-se
(3.15)
em que (3.15) é satisfeita para todo se
(3.16)
A inequação (3.16) torna-se uma LMI. Dessa forma, é possível substituir
com pré-multiplicando e pós-multiplicando por na
inequação (3.15). Definindo como e substituindo na inequação obtida,
encontra-se a equação (3.17)
(3.17)
Utilizando o complemento de Schur na inequação (3.17), obtêm-se
(3.18)
Agora suponha que em , o conjunto de
incertezas está contido em um politopo delimitado por . A LMI da inequação (3.18) deve satisfazer todos os vértices do politopo indicados pelo parâmetro
Capítulo 3. RMPC 18
(3.19)
Assim, considerando as LMIs (3.14) e (3.19), verificamos que a cada período de amostragem o estado de um sistema incerto deve ser medido. O problema deve ser formulado na forma das Equações (3.20), sujeito as inequações matriciais (3.21) e (3.22), ou seja
(3.20) sujeito a
(3.21)
e
(3.22)
A conclusão do problema de minimização na forma de LMI das inequações em (3.20), (3.21) e (3.22) demonstra o enunciado do Teorema 1 do artigo do Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996).
Teorema 1. Seja o estado do sistema incerto descrito no modelo (2.1) medido no instante de amostragem . Suponha que não existem restrições sobre a entrada de controle e nem sobre a saída da planta. Suponha também que o conjunto incerto seja definido por um politopo como em (2.2).
Então, a matriz de realimentação de estado da lei de controle
, que minimiza o limite superior da
Capítulo 3. RMPC 19
(3.23)
em que e são matrizes obtidas da solução (caso ela exista) do
problema de minimização de um objetivo (3.20) sujeito a (3.21) e (3.22). As seções seguintes apresentam a formulação do RMPC com restrição no sinal de controle e no sinal de saída expressos na forma de LMI.
3.4 Formulação do RMPC baseado em LMI com restrição
Nesta seção mostraremos a formulação do RMPC com restrição na entrada, na saída e como incorporá-la ao problema de otimização na forma de uma LMI.
3.4.1 Restrição no sinal de controle
Nesta seção, mostraremos como limitar o sinal de controle )
incorporando essa restrição na forma de uma LMI. Supondo a existência de restrições simétricas sobre os níveis dos sinais de entrada. Consideraremos uma restrição na norma euclidiana representada na equação (3.24).
(3.24)
A equação (3.24) garante uma restrição imposta para todo o horizonte
da variável manipulada, mesmo que somente o sinal no
instante seja aplicado no processo sendo descartados todos os demais. Assim, temos que
(3.25)
Utilizando o complemento de Schur e observando que
Capítulo 3. RMPC 20
, (3.26)
Essa é uma LMI em e . Com a equação (3.26) inserimos a restrição na forma de LMI no controlador RMPC.
3.4.2 Restrição na saída
Supondo a existência de restrições simétricas na saída
(3.27)
a mesma é garantida se a seguinte LMI for satisfeita
, (3.28)
As demonstrações das restrições no sinal de entrada e de saída podem ser encontradas em Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996).
Teorema 2 – Factibilidade
Qualquer solução de otimização factível do Teorema 1, no instante de
amostragem é também factível para todo . Deste modo, se o problema
de otimização do Teorema 1 for factível para o instante de amostragem
então ele será factível para todos os instantes de amostragens e o
sistema em malha fechada será assintoticamente estável. A prova desse teorema pode ser encontrada em Kothare, M.V.; Balakrishnan, V.; Morari, M. (1996).
3.5 Conclusão
Capítulo 3. RMPC 21
22 Capítulo
Capítulo 4
Resultados de Simulações
4.1 Introdução
Nesta seção apresentamos resultados de simulações do RMPC baseados nos modelos não-lineares dos sistemas de tanques. Foram simuladas perturbações nos processos para avaliar como o controlador em questão as rejeita. A implementação do controlador se deu em ambiente Scilab e os problemas de otimização foram resolvidos utilizando a ferramenta LMITool do referido ambiente.
4.2 Modelagem da Planta
O sistema utilizado no controle é um sistema de tanques acoplados da
Quanser Innovate Educate, Figura 4.1.
Capítulo 4. Resultados de Simulações 23
O sistema mostrado na Figura 4.1 pode ser representado pela Figura 4.2, a partir da qual será descrito o funcionamento do sistema de tanques acoplados da Quanser. O funcionamento ocorre da seguinte maneira: os dois tanques estão ligados em cascata, ou seja, o tanque 1 recebe água da bomba
e o tanque 2 recebe a água do tanque 1 (LOPES, J. S. B. etal., 2006).
Esse sistema permite trabalhar com duas configurações, a primeira é simplesmente controlar o nível do tanque 1, sendo que este se comporta como um sistema de primeira ordem; já a segunda configuração tem como objetivo controlar o nível do tanque 2, sendo que neste caso o comportamento é de um sistema de segunda ordem (SOUZA, F. E. C. 2006).
Figura 4.2 - Configuração do Sistema de Tanques.
O modelo matemático da equação (4.1) representa a dinâmica do sistema de nível para o tanque 1.
(4.1)
Em (4.2) temos o modelo linearizado em torno de um ponto de operação .
Capítulo 4. Resultados de Simulações 24
Para controlar o tanque 2 deve-se levar em conta o sistema acoplado, ou seja, o tanque 2 depende do tanque 1.
A equação (4.3) representa o modelo matemático de segunda ordem.
(4.3)
A equação (4.4) representa o sistema (4.3) linearizado nos pontos de
operação e .
(4.4)
A Tabela 4.1 é utilizada para identificar cada parâmetro das Equações
acima (FERNANDES JUNIOR, F. G. et al., 2005).
Tabela 4.1 – Descrição dos parâmetros
Parâmetros Descrição Valores
Nível dos tanques 1 e 2 Saídas
Áreas das bases dos tanques 1 e 2 15,518 cm2
&
Orifício de saída do tanque – Pequeno Orifício de saída do tanque – Médio Orifício de saída do tanque – Grande
0,07917297670 cm2
0,17813919765 cm2
0,24246724125 cm2
Ponto de operação para linearização do modelo
Ponto de operação para linearização do modelo
15 cm 15 cm
Constante da bomba;
Tensão máxima admitida 4,6 (cm
3/s).V
±22 V Tensão aplicada na bomba Entrada Aceleração da gravidade 981 cm/s2
É importante ressaltar que em todos os gráficos apresentados neste capítulo, não se mostra a tensão na bomba no instante imediatamente anterior ao fechamento da malha de controle.
4.3 Parâmetro incerto
O manual do Quanser Innovate Educate adota um valor nominal de 4,6
Capítulo 4. Resultados de Simulações 25
alteração com o tempo desse valor nominal devido ao desgaste natural de funcionamento (desgaste da bomba).
Foi adotada nas simulações uma variação de ±10% de incerteza na constante da bomba para os resultados simulados. Os resultados se basearam nos modelos não lineares representados pelas equações (4.1) e (4.3), pois o objetivo é aproximar a simulação ao máximo da planta real. Essas simulações servirão de base para justificar a implementação do controlador RMPC com restrição no sistema regulatório de nível presente no Laboratório de Engenharia
de Computação e Automação – LECA, da Universidade Federal do Rio Grande
do Norte – UFRN.
4.4 – Caso 1: Sistema Não-Linear de 1ª Ordem
Para a simulação do Sistema Não-Linear de 1ª Ordem é necessário transformar o modelo (4.1) na forma de Espaço de Estados. As equações (4.5) e (4.6) representam o sistema em Espaço de Estado discreto para um período de amostragem T = 0,2s, considerando que os extremos da constante da bomba valem 4,14 e 5,06 (±10%), respectivamente, e linearizado no ponto
.
(4.5)
(4.6)
O sistema representado pelas equações (4.5) e (4.6) representa os vértices do politopo, pois só há um parâmetro de incerteza considerado que corresponde à incerteza da bomba. A formulação do problema de otimização na forma de LMIs sem restrição consiste em minimizar (4.7) sujeito a (4.8), e (4.9) e (4.10)
(4.7) sujeito a
(4.8)
Capítulo 4. Resultados de Simulações 26
(4.9)
(4.10)
em que foi adotado
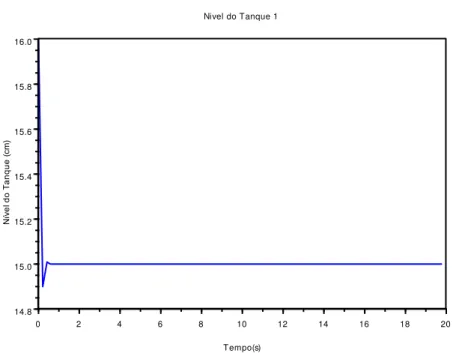
4.4.1 – Resultados simulados do RMPC sem perturbação e sem restrições
O resultado da Figura 4.3 mostra o comportamento do sistema de tanques de 1º ordem não-linear como parâmetro incerto com valor de 4,14, ou seja, um decréscimo de 10% no seu valor nominal, Km = 4,6.
0 2 4 6 8 10 12 14 16 18 20
14.8 15.0 15.2 15.4 15.6 15.8 16.0
Nivel do Tanque 1
Tempo(s)
N
íve
l d
o
Ta
nq
ue
(cm
)
Te
nsã
o
na
B
om
ba
(V
)
Figura 4.3 – Saída do sistema não-linear de 1ª ordem sem perturbação e sem restrição.
Observa-se que o estado inicial era 16 cm, Figura 4.3, em seguida foi para o valor de 15 cm (valor que corresponde à origem do sistema linearizado).
Capítulo 4. Resultados de Simulações 27 N íve l d o Ta nq ue (cm )
0 2 4 6 8 10 12 14 16 18 20
-10 -8 -6 -4 -2 0 2 4 6 8
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
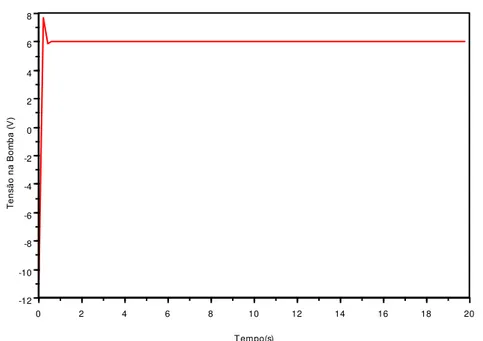
Figura 4.4 - Sinal de controle do RMPC com incerteza no Km=4.14 sem perturbação e sem restrição.
A Figura 4.5 apresenta o comportamento do sistema não-linear de 1ª ordem resultado com o parâmetro incerto alterado para 5,06, ou seja, com um aumento de 10% no seu valor nominal.
0 2 4 6 8 10 12 14 16 18 20
14.8 15.0 15.2 15.4 15.6 15.8 16.0
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Figura 4.5 - Comportamento do sistema não-linear de 1ª ordem para a incerteza no Km=5,06 sem perturbação e sem restrição.
Capítulo 4. Resultados de Simulações 28 N íve l d o Ta nq ue (cm )
0 2 4 6 8 10 12 14 16 18 20
-12 -10 -8 -6 -4 -2 0 2 4 6 8
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.6 - Sinal de controle do RMPC para a incerteza no Km = 5,06 sem perturbação e sem restrição.
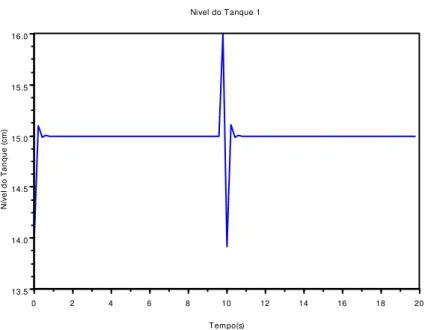
4.4.2 - Resultados simulados do RMPC com perturbação e sem restrições
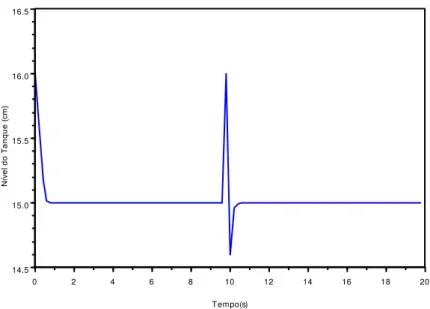
A situação da Figura 4.7 mostra o comportamento do processo com uma perturbação do tipo pulso.
0 2 4 6 8 10 12 14 16 18 20
14.0 14.2 14.4 14.6 14.8 15.0 15.2 15.4 15.6 15.8 16.0
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 29
A Figura 4.8 apresenta o sinal de controle do RMPC. O controlador RMPC atua no instante em que houve a perturbação. O gráfico da Figura 4.8 apresentou uma grande variação.
N íve l d o Ta nq ue (cm )
0 2 4 6 8 10 12 14 16 18 20
-10 -5 0 5 10 15 20 25
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.8 - Sinal de controle com incerteza no Km=4.14 e perturbação do tipo pulso e sem restrição.
O sinal de controle da Figura 4.8, na prática, não poderia ser aplicado devido a bomba estar limitada fisicamente a uma tensão máxima de 22 volts. A da Figura 4.9 mostra o comportamento do processo com uma perturbação do tipo degrau quando a constante da bomba tem o valor de 5,06.
0 2 4 6 8 10 12 14 16 18 20
13.5 14.0 14.5 15.0 15.5 16.0
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 30
Já o sinal de controle do RMPC apresentou o seguinte comportamento, Figura 4.10. N íve l d o Ta nq ue (cm )
0 2 4 6 8 10 12 14 16 18 20
-15 -10 -5 0 5 10 15 20 25
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.10 - Sinal de controle com incerteza no Km=5.06 com perturbação do tipo pulso e sem restrição.
4.4.3 - Resultados simulados do RMPC com perturbação e com restrições
A resolução do problema com restrição consiste em adicionar mais uma LMI, equação (3.29) ao problema de otimização (4.7). A Figura 4.11 apresenta a resposta com uma perturbação do tipo pulso.
0 2 4 6 8 10 12 14 16 18 20
14.5 15.0 15.5 16.0 16.5
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 31
. A Figura 4.12 apresenta o comportamento do controlador RMPC com
uma restrição de 15 volts na amplitude do sinal de controle, ou seja, na prática a bomba atuaria no processo com no máximo uma tensão de 15 volts.
N íve l d o Ta nq ue (cm )
0 2 4 6 8 10 12 14 16 18 20
-2 0 2 4 6 8 10 12 14 16
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.12 - Sinal de controle do RMPC com perturbação e com restrição de 15 volts e Km=4,14.
A Figura 4.13 mostra o resultado do processo com uma perturbação do tipo degrau.
0 2 4 6 8 10 12 14 16 18 20
14.5 15.0 15.5 16.0
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 32
A Figura 4.14 o comportamento da variável manipulada para a perturbação do tipo degrau com restrição no sinal de controle.
N íve l d o Ta nq ue (cm )
0 2 4 6 8 10 12 14 16 18 20
-2 0 2 4 6 8 10 12 14
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.14 - Sinal de controle com perturbação e com restrição de 15 volts. 4.5 – Caso 2: Sistema Não-Linear de 2º Ordem
Para a simulação do Sistema Não-Linear de 2º Ordem é necessário encontrar o modelo em Espaço de Estados. As equações (4.12) e (4.13) representam o sistema em Espaço de Estado discreto para um período de amostragem T = 0,2s, considerando a constante da bomba 4,14 e 5,06,
respectivamente, linearizados para e .
(4.12)
(4.13)
Capítulo 4. Resultados de Simulações 33
(4.14) sujeito a
(4.15)
e
(4.16)
(4.17)
em que foi adotado Os resultados a seguir foram
simulados com a alteração no parâmetro da constante da bomba. A constante sofreu um aumento e uma diminuição de 10% no seu valor nominal, Equações (4.12) e (4.13).
4.5.1 - Resultados simulados do RMPC sem perturbação e sem restrições
Capítulo 4. Resultados de Simulações 34
0 20 40 60 80 100 120
14.0 14.2 14.4 14.6 14.8 15.0 15.2 15.4
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Figura 4.15 - Comportamento do tanque 1 (2ª ordem) sem perturbação e sem restrição.
A Figura 4.16 mostra o comportamento do tanque 2.
N íve l d o Ta nq ue (cm )
0 20 40 60 80 100 120
14.0 14.1 14.2 14.3 14.4 14.5 14.6 14.7 14.8 14.9 15.0
Nivel do Tanque 2
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Figura 4.16 - Comportamento do tanque 2 (2ª ordem) sem perturbação e sem restrição.
Capítulo 4. Resultados de Simulações 35 N íve l d o Ta nq ue (cm ) N íve l d o Ta nq ue (cm )
0 20 40 60 80 100 120
5 10 15 20 25 30 35
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.17 - Gráfico do sinal de controle do RMPC com Km=4,14 sem perturbação e sem restrição.
4.5.2 - Resultados simulados do RMPC com perturbação e sem restrições
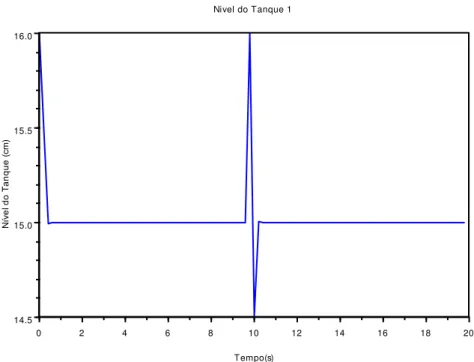
A Figura 4.18 mostra o comportamento do tanque 1 com uma perturbação do tipo pulso aplicada no tanque 2.
0 20 40 60 80 100 120
14.0 14.2 14.4 14.6 14.8 15.0 15.2 15.4
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 36
A Figura 4.19 mostra o comportamento do tanque 2 com uma perturbação do tipo pulso, no mesmo.
N íve l d o Ta nq ue (cm )
0 20 40 60 80 100 120
14.0 14.2 14.4 14.6 14.8 15.0 15.2 15.4 15.6 15.8 16.0
Nivel do Tanque 2
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Figura 4.19 - Nível do tanque 2 do sistema não-linear de 2ª ordem com uma perturbação do tipo pulso e sem restrição.
A Figura 4.20 mostra o comportamento da variável manipulada do RMPC utilizando o km = 4,14.
N íve l d o Ta nq ue (cm ) N íve l d o Ta nq ue (cm )
0 20 40 60 80 100 120
0 5 10 15 20 25 30 35
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 37
4.5.3 - Resultados simulados do controlador RMPC com perturbação e com restrições
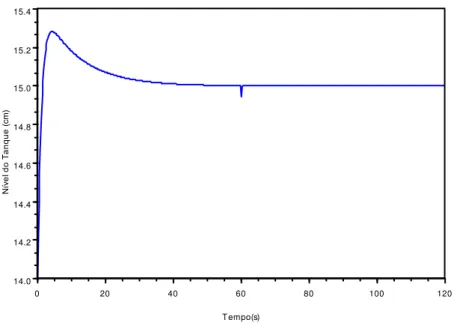
A Figura 4.21 mostra o comportamento do tanque 1 com uma perturbação ocasionada do acoplamento do tanque 2.
0 20 40 60 80 100 120
14.0 14.2 14.4 14.6 14.8 15.0 15.2 15.4
Nivel do Tanque 1
Tempo(s) N íve l d o Ta nq ue (cm ) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Figura 4.21 - Nível do tanque 1 do sistema não-linear de 2ª ordem com perturbação do tipo pulso e com restrição.
Na Figura 4.22 mostra o comportamento do tanque 2 com a perturbação do tipo pulso.
N íve l d o Ta nq ue (cm )
0 20 40 60 80 100 120
14.0 14.2 14.4 14.6 14.8 15.0 15.2 15.4 15.6 15.8 16.0
Nivel do Tanque 2
Tempo(s) N íve l d o Ta nq ue (cm ) Te nsã o na B om ba (V )
Capítulo 4. Resultados de Simulações 38
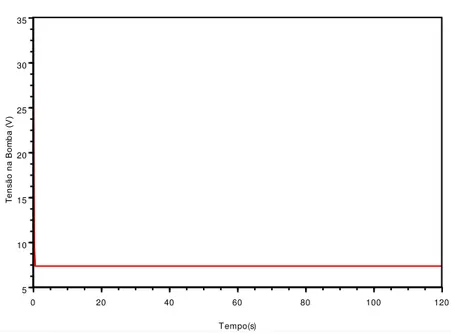
A Figura 4.23 mostra o comportamento do sinal do controle durante a perturbação com a restrição imposta pela inequação (3.29).
N íve l d o Ta nq ue (cm ) N íve l d o Ta nq ue (cm )
0 20 40 60 80 100 120
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0 10.5 11.0 11.5
Sinal de Controle
Tempo(s) Te nsã o na B om ba (V )
Figura 4.23 - Gráfico do sinal de controle do RMPC com perturbação e com restrição de 15 volts.
4.6 Conclusão
39 Capítulo
Capítulo 5
Detalhamento da Estrutura Física
5.1 Introdução
Depois de uma série de resultados obtidos através de simulações, foram feitos os ensaios na planta física. Para isso, foi necessário montar a estrutura física, Figura 5.1, com os equipamentos localizados no Laboratório de Engenharia de Computação e Automação - LECA, da Universidade Federal do Rio Grande do Norte UFRN.
Figura 5.1– Estrutura Física.
Os equipamentos e softwares utilizados na estrutura física da Figura 5.1 foram
Processo (Sistema Hidráulico);
Módulo Amplificador de Potência – UPM 2405-240;
Kit de Treinamento ZTK 900 da HI Tecnologia (CLP ZAP 900)
como conversor A/D e D/A;
Módulo de comunicação OPC (Toolbox do Scilab);
Computador com a estratégia de controle RMPC utilizando a
plataforma Scilab (Scientific Laboratory);
OPC A/D - D/A
Capítulo 5. Detalhamento da Estrutura Física 40
Os tópicos a seguir apresentarão uma breve descrição dos componentes da estrutura física.
5.2 Sistema Hidráulico e o módulo de Potência
O sistema hidráulico utilizado é um sistema de tanques acoplados mostrado na Figura 5.2.
Figura 5.2 – Sistema de Tanques da Quanser.
O sistema de tanques acoplados contém conexões elétricas de entrada e saída que se comunicam com os sensores. Através do módulo amplificador de potência, UPM 2405-240, também da Quanser é possível realizar interligação com o kit de treinamento ZTK 900, Figura 5.3.
Figura 5.3 – Módulo amplificador UPM 2405-240.
Capítulo 5. Detalhamento da Estrutura Física 41
5.3 Kit de treinamento ZTK 900
O kit de treinamento ZTK 900 foi utilizado com o intuito de servir de interface A/D e D/A para a planta. Como o Scilab não pode estabelecer
comunicação direta com os drivers do fabricante da planta, foi utilizado o CLP
para realizar essa interface. O Scilab, dessa forma, comunica-se com o CLP
via protocolo OLE for Process Control (OPC).
O ZTK 900 é um módulo didático baseado no controlador lógico programável ZAP 900, da HI Tecnologia, que tem por finalidade criar um ambiente no qual aplicações desenvolvidas para o CLP (Controlador Lógico Programável) possam ser testadas através da geração de condições de processo e observação do tratamento realizado pelo CLP nestas condições. Os sinais de entrada e saída do kit de treinamento ZTK 900 são conectados ao módulo amplificador de potência UPM 2405-240 via bornes tipo banana. O painel do kit de treinamento ZTK 900 disponibiliza os seguintes recursos para interface com processo, Figura 5.4.
Figura 5.4 – Painel do kit de treinamento ZTK 900.
Descrição do painel do kit de treinamento ZTK 900 da Figura 5.4:
Contém 4 bornes para sinais de entradas digitais do tipo PNP
Capítulo 5. Detalhamento da Estrutura Física 42
Contém 4 bornes para sinais de saídas digitais tipo PNP e um
borne preto de 0 V de referência para as cargas utilizadas nas saídas digitais;
Contém 2 bornes para sinais de entradas analógicas, podendo
operar individualmente na faixa de 0..10 Vdc e um borne preto de 0V para conexão da referência dos sinais analógicos,
e por último 1 par de bornes disponibilizando uma saída analógica
na faixa de 4..20 mA.
Para a comunicação com o módulo amplificador as entradas e saídas devem trabalhar com tensões. Logo, foi instalado o circuito integrado LM 324N para converter o sinal de saída de 0..4 mA para -5 a 5 volts adequando o sistema para comunicar com o módulo de potência UPM 2405-240, Figura 5.5.
Figura 5.5 – Acoplamento entre o módulo amplificador e o kit de treinamento ZTK 900.
Todas as informações adquiridas e processadas pelo controlador são armazenadas em variáveis. Existem vários tipos de variáveis que podem ser utilizadas para armazenar as informações necessárias para operação do equipamento. Cada tipo é identificado por uma letra única seguida de um número. As variáveis utilizadas nesse processo foram a entrada analógica
identificada pela letra “E” e a saída analógica identificada pela letra “S”.
Os tipos de dados “E” e “S” operam com valores normalizados para
Capítulo 5. Detalhamento da Estrutura Física 43
1. A conversão do endereço da memória do CLP [0-4095] referente à
tensão para o valor referente ao nível em [0 – 30] cm, equação 5.1.
(5.1)
2. A conversão do sinal de controle [-3 – +3] volts para o endereço a ser
aplicado no CLP [0 – 4095].
(5.2)
5.4 Implementação da Estratégia de Controle
A estratégia de controle RMPC foi desenvolvida em um computador com
o Software – Scilab (Scientific Laboratory). A implementação da comunicação
com o processo foi feita com o toolbox do Scilab para OLE Process Control
(OPC). O resolvedor utilizado foi o LMITOOL que é um pacote que implementa uma interface amigável para resolver o problema de otimização na forma das desigualdades matriciais lineares. O Scilab é um software aberto no qual usuários podem definir novos tipos de dados e operações. Hoje a utilização do Scilab dá-se internacionalmente nos ambientes acadêmicos e industriais
(LOPES, 2004).
5.5 Módulo de Comunicação OPC (OLE for Proces Control)
O OLE for Process Control (OPC) é o modo mais comum de se conectar
fontes de dados como equipamentos, banco de dados etc, com aplicações cliente. Ele otimiza a interface entre aplicações cliente e servidor fornecendo um mecanismo padrão para comunicar dados de um fonte de dados para qualquer aplicação cliente (CHISHOLM, A., 1998).
O servidor OPC é um objeto do tipo COM definido pela Microsoft. Entre suas funções principais ele permite a aplicação cliente: Gerenciar grupos,
incluir e remover itens em um grupo, navegar pelas tags existentes (browser