UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E COMPUTAÇÃO
Controlador Preditivo Generalizado
Multi-Modelo aplicado ao Controle de Pressão
Arterial
Humberto Araújo da Silva
Orientador: Prof. Dr. Anderson Luiz de O. Cavalcanti Co-orientador: Prof. Dr. André Laurindo Maitelli
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenha-ria Elétrica e Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Ciências.
Divisão de Serviços Técnicos
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Silva, Humberto Aráujo da.
Controlador Preditivo Generalizado Multi-Modelo aplicado ao Controle de Pressão Arterial / Humberto Araújo da Silva - Natal, RN, 2010
69 f.
Orientador: Prof. Dr. Anderson Luiz de O. Cavalcanti Co-orientador: Prof. Dr. André Laurindo Maitelli
Tese (mestrado) - Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica e Computação.
1. Introdução - Dissertação. 2. Controle de Pressão Arterial - Dissertação. 3. Controlador Preditivo Generalizado - Dissertação. 4. GPC Baseado no Pre-ditor de Smith - Dissertação. 5. Metodologia Multi-Modelo - Dissertação. I. Cavalcanti, Anderson Luiz de O. II. Maitelli, André Laurindo. III. Título.
Controlador Preditivo Generalizado
Multi-Modelo aplicado ao Controle de Pressão
Arterial
Humberto Araújo da Silva
Dissertação de Mestrado aprovada em 19 de março de 2010 pela banca examinadora composta pelos seguintes membros:
Prof. Dr. Anderson Luiz de O. Cavalcanti (orientador) . . . DCA/UFRN
Prof. Dr. André Laurindo Maitelli (co-orientador) . . . DCA/UFRN
Prof. Dr. Julio Elias Normey Rico . . . DAS/UFSC
Resumo
Em muitos procedimentos cirúrgicos existe a necessidade de realizar o controle da pressão arterial para, com isto, preservar a saúde do paciente. Para diminuir as chances de uma complicação, é necessário reduzir a pressão arterial o mais rápido possível. A infusão contínua de drogas vasodilatadoras, como o nitroprussiato de sódio (NPS), reduz rapidamente a pressão arterial na maioria dos pacientes. Porém, cada paciente tem uma sensibilidade diferente a infusão do NPS, o que faz com que os parâmetros e os atrasos do sistema sejam desconhecidos a priori. Além disso, os parâmetros de uma função de transferência associados à um paciente particular são variantes no tempo. Desta forma, o objetivo do trabalho consiste em desenvolver uma metodologia capaz de controlar de forma automática a pressão arterial na presença de incertezas de parâmetros e de gran-des atrasos. Para isso foi gran-desenvolvida uma metodologia multi-modelo, onde para cada modelo existe um Controlador Preditivo especificamente sintonizado, e um mecanismo adaptativo decide qual controlador deve ser o dominante para uma determinada planta.
Palavras-chave: Pressão Arterial, Controle Preditivo, Preditor de Smith, Incerteza
Abstract
Postsurgical complication of hypertension may occur in cardiac patients. To decrease the chances of complication it is necessary to reduce elevated blood pressure as soon as possible. Continuous infusion of vasodilator drugs, such as sodium nitroprusside (Ni-pride), would quickly lower the blood pressure in most patients. However, each patient has a different sensitivity to infusion of Nipride. The parameters and the time delays of the system are initially unknown. Moreover, the parameters of the transfer function asso-ciated with a particular patient are time varying. the objective of the study is to develop a procedure for blood pressure control in the presence of uncertainty of parameters and considerable time delays. So, a methodology was developed multi-model, and for each such model a Preditive Controller can be a priori designed. An adaptive mechanism is then needed for deciding which controller should be dominant for a given plant.
Keywords: Blood Pressure, Preditive Control, Smith Preditor, Parametric
Sumário
Sumário i
Lista de Figuras iii
Lista de Tabelas iv
Lista de Símbolos e Abreviaturas v
1 Introdução 1
1.1 Estado da Arte . . . 2 1.2 Objetivos . . . 3 1.3 Organização do texto . . . 4
2 Controle de Pressão Arterial 5
2.1 Introdução . . . 5 2.2 Formulação do Problema . . . 5
3 Controlador Preditivo Generalizado 8
3.1 Introdução ao Controle Preditivo . . . 9 3.2 Formulação do GPC . . . 11
4 GPC Baseado no Preditor de Smith 17
4.1 O Algoritmo SPGPC . . . 19
5 Metodologia Multi-Modelo 21
5.1 Banco de Modelos . . . 22 5.2 Banco de Controladores . . . 24 5.3 Algoritmo de Controle . . . 24
6 Análise de Resultados 26
6.1 Simulações . . . 26 6.2 Comparação com o Trabalho do He, Kaufman e Rob Roy . . . 29
6.3 Análise de Robustez . . . 39
6.3.1 Representação do Erro de Modelagem . . . 40
6.3.2 Estabilidade e Robustez . . . 43
6.3.3 Robustez do GPC . . . 45
6.3.4 Robustez do SPGPC . . . 46
7 Conclusões 48
Lista de Figuras
3.1 Conceito de Horizonte de Predição . . . 9
3.2 Estrutura Básica do MPC . . . 11
4.1 Estrutura de Controle do Preditor de Smith . . . 17
5.1 Arquitetura GPC Multi-Modelo . . . 22
5.2 Arquitetura SPGPC Multi-Modelo . . . 23
6.1 Poliedro formado pelo banco de modelos . . . 27
6.2 Ruído de Medição . . . 29
6.3 Resultados para o Paciente 1: Utilizando grandes variações paramétricas . 30 6.4 Resultados para o Paciente 2: Utilizando grandes variações paramétricas . 31 6.5 Resultados para o Paciente 3: Utilizando grandes variações paramétricas . 32 6.6 Resultados para o Paciente 4: Utilizando grandes variações paramétricas . 33 6.7 Resultados para o Paciente 5 . . . 35
6.8 Resultados para o paciente 6 . . . 36
6.9 Resultados para o paciente 7 . . . 37
6.10 Resultados para o paciente 8 . . . 38
6.11 Diagrama de blocos do sistema nominal . . . 40
6.12 Diagrama de blocos do sistema real . . . 40
6.13 Diagrama de Nyquist . . . 41
6.14 Representação do sistema real na forma de diagrama de blocos . . . 42
6.15 Comportamento típico deeM(w) . . . 42
6.16 GPC em Malha fechada . . . 45
6.17 Sistema de malha fechada . . . 45
6.18 Controle preditivo SPGPC . . . 46
6.19 Índice de Robustez x Frequência do GPC e SPGPC . . . 47
Lista de Tabelas
2.1 Valores dos parâmetros do modelo discreto da planta para um período de
amostragem de 15 s . . . 7
6.1 Banco de Modelos . . . 26
6.2 Sintonia dos Controladores no MMGPC . . . 28
6.3 Sintonia dos Controladores no MMSPGPC . . . 28
6.4 Pacientes utilizados nas simulações . . . 28
6.5 modelos contínuos de pacientes utilizados em HE et al. 1986 . . . 34
6.6 modelos discretos de pacientes utilizados em HE et al. 1986 . . . 34
6.7 Comparação de desempenho PI Multi-Modelo, MMGPC, e SPGPC . . . 39
Lista de Símbolos e Abreviaturas
Cs Concentração do medicamento (µg/ml)
I Taxa de infusão
IRgpc−Multi Índice de Robustez do GPC Multi-Modelo
IRgpc Índice de Robustez do GPC
IRspgpc−Multi Índice de Robustez do SPGPC Multi-Modelo
IRspgpc Índice de Robustez do SPGPC
J Função objetivo
Ks Sensibilidade ao medicamento
N1 Horizonte mínimo de predição
Nu Horizonte de controle
Ny Horizonte de predição
Po Pressão arterial inicial
R2j O resíduo relativo ao j-ésimo modelo
Tc Atraso de recirculação
Ti Atraso de transporte inicial
Ts Tempo de estabilização (Min.)
UM Taxa de infusão máxima(ml/h)
Up Peso do paciente(kg)
Wj Fatores de peso para o j-ésimo modelo
∆Y Variação da pressão provocada pela infusão do nitroprussiato de sódio α Constante de recirculação
εA(s) Erro aditivo
εM(s) Erro mutiplicativo
γ Constante de variação
ˆ
y(k+i) Valor estimado dey(k)i-passos à frente
τ Constante de tempo do sistema
gN(w) Função de transferência do sistema nominal
gR(w) Função de transferência do sistema real
iM Dose máxima recomendada (10µg.kg−1min−1)
pc Pressão de referência (setpoint)
q−1 Representa o operador de atraso
r(k+i) Trajetória de referência futura
u(k) Sinal de controle
umax Máximo valor do sinal de controle (ml/h)
v(k) Ruído estocástico
y(k) Pressão de saída do sistema no instantek ym j Pressão de saída do j-ésimo modelo
GPC: Generalized Predictive Control
NPS: Nitroprussiato de Sódio
PAM: Pressão Arterial Média
SAC: Supervisory Adaptive Control
Capítulo 1
Introdução
Complicações de hipertensão pós-cirúrgicas podem ocorrer em pacientes cardíacos. Isto é particularmente evidente após os procedimentos da cirurgia de revascularização do miocárdio. Para diminuir as chances de uma complicação, é necessário reduzir a pressão arterial o mais rápido possível. A infusão contínua de drogas vasodilatadoras, como o nitroprussiato de sódio (NPS), reduzem rapidamente a pressão arterial na maioria dos pacientes. Porém, uma overdose do NPS poderia causar efeitos colaterais indesejáveis.
Cada paciente tem uma sensibilidade diferente ao medicamento, ou seja, uma mesma dose do NPS que altera muito a pressão arterial em um paciente, pode praticamente não alterar nada em um outro. Desta forma, ocorre um vasto leque de sensibilidades, ao me-dicamento, nos diversos pacientes. Por isso, é necessário controlar a taxa de infusão do nitroprussiato cuidadosamente para atingir a pressão arterial desejada. Manter a pressão arterial pretendida, exige um monitoramento constante da pressão arterial e frequente-mente um ajuste na taxa de infusão do medicamento. O controle manual da pressão arte-rial por um profissional da área de saúde é bastante exaustivo, consome bastante tempo, e o resultado as vezes é de má qualidade. Um profissional inexperiente poderá deixar de considerar o atraso referente a resposta circulatória, o vasto leque de sensibilidades dos pacientes ao medicamento, e as mudanças nas características do paciente ao longo do tempo [Slate 1980]. Isto pode levar a uma mudança oscilatória na pressão devido a uma correção excessiva. A necessidade de melhores cuidados com pacientes criticamente doentes exige um sistema de controle em malha fechada eficaz e preciso para regular a pressão arterial. Experimentos clínicos relatados na literatura têm mostrado procedimen-tos automáticos seguros, eficazes, e muitas vezes superior aos métodos manuais [Reves et al. 1978], [Slate & Sheppard 1982].
CAPÍTULO 1. INTRODUÇÃO 2
a priori [Lainiotis et al. 1971], constituindo assim um banco de controladores. Neste banco, foram utilizados Controladores Preditivos Generalizados baseados no Preditor de Smith(SPGPCs). Nesse caso, foi projetado um SPGPC para cada um desses modelos. E um mecanismo adaptativo fez-se necessário para decidir qual controlador deve ser o do-minante para uma determinada planta (ou paciente). A escolha deste tipo de controlador deve-se ao fato deles possuírem algumas características interessantes para o sistema em questão, tais como [Camacho & Bordons 2004]:
• pode-se utilizar para controlar uma grande variedade de processos, desde processos
muito simples até processos com dinâmicas complexas como processos com grande tempo morto, processos de fase não mínima, processos instáveis ou processos com incerteza de parâmetros;
• introduz um controle antecipativo (feedforward) e de forma natural, que compensa as perturbações de medição;
• a lei de controle resultante é de fácil implementação;
• é muito útil quando se conhece as referências futuras;
• permite tratar as restrições de uma forma sistemática e conceitualmente muito
sim-ples durante a fase de concepção.
1.1
Estado da Arte
Kaufman e Rob Roy, em 1986, apresentaram em seu trabalho [He et al. 1986] um procedimento de controle adaptativo multi-modelo para controle de pressão arterial. Esta metodologia baseia-se no pressuposto de que a planta pode ser representada por um nú-mero finito de modelos e que, para cada um desses modelos um controlador pode ser projetado a priori. Desta forma um mecanismo adaptativo é necessário para decidir qual controlador deve ser o dominante para uma determinada planta. Simulações computaci-onais mostraram que o controle adaptativo multi-modelo pode ser aplicado com sucesso para controle de pressão arterial, apesar de incertezas no atrasos, na constante de tempo e ganhos do sistema.
CAPÍTULO 1. INTRODUÇÃO 3
Diversas simulações demonstraram, segundo os autores, a robustez do controlador pro-posto na presença de elevados níveis de ruído (com variância de 4mmHg2), em toda a gama de parâmetros da planta, com grande variação destes parâmetros.
Em 1990, James Martin apresentou em seu trabalho [Martin et al. 1992] uma aborda-gem dual para controle adaptativo da pressão arterial utilizando o nitroprussiato de sódio. Para evitar possíveis reações excessivas, mantendo, ao mesmo tempo, uma boa resposta ao degrau. Um controlador adaptativo agressivo foi desenvolvido para alcançar a resposta ao degrau desejada, e um supervisor foi desenvolvido em torno do controlador para limitar reações excessivas na presença de pertubações. Este supervisor foi capaz de desempenhar diversas funções, como por exemplo, modificar ganhos do controlador, limitar taxas de infusão e taxas de variação de infusão, parar/iniciar a adaptação e manter a taxa de infu-são constante. Foram realizadas simulações para demonstrar o desenvolvimento de um supervisor especificamente concebido para um controlador adaptativo multi-modelo. Em todas as simulações o supervisor limitou as reações excessivas do controlador na presença de grandes pertubações. Os autores destacam, que esta técnica pode também ser aplicada a outros sistemas em malha fechada, como dopamina e débito cardíaco, e que mostra-se promissora para controle multi-variável. Os autores continuaram desenvolvendo a téc-nica do SAC (supervisory adaptive control), levando-a para o cenário clínico [Martin et al. 1982].
Foi publicado em 1997 [Maitelli & Yoneyama 1997], o trabalho de André L. Mai-telli e Takashi Yoneyama, o qual apresentava uma nova abordagem de controle adaptativo da pressão arterial utilizando drogas vasoativas. A idéia deste trabalho foi utilizar um controle adaptativo que incorpora o conceito de dualidade, no sentido deFeldbaume con-siderar o funcional de custo M-passos à frente no tempo. A propriedade dual significa que o sinal de controle é escolhido de forma que a estimação dos parâmetros do modelo e regulação do sinal de saída sejam balanceados de forma ótima. O controlador adapta-tivo proposto minimiza o erro ( diferença entre a pressão e a referência) alguns passos à frente, forçando uma melhoria da qualidade no processo de estimação dos parâmetros e, conseqüentemente, uma melhoria em termos de controle global. As simulações mostra-ram que, o controlador proposto, apresentou uma melhor resposta transitória comparado a outros controladores equivalentes.
1.2
Objetivos
CAPÍTULO 1. INTRODUÇÃO 4
parâmetros do sistema sejam desconhecidos a priori. Dessa forma, o objetivo principal do trabalho é desenvolver uma metodologia que seja capaz de realizar o controle automático da pressão arterial na presença de incertezas de parâmetros e de grandes atrasos. Em outras palavras, desenvolver um metodologia capaz de realizar o controle automático da pressão para diversos pacientes, sem a necessidade de substituir o controlador, de tal forma a assegurar uma taxa razoável de variação da pressão arterial e garantir segurança à saúde do paciente.
1.3
Organização do texto
Capítulo 2
Controle de Pressão Arterial
2.1
Introdução
A função de transferência relativa à redução da pressão para a taxa de infusão do NPS, foi desenvolvida por Slate [Slate 1980]. Esta função de transferência inclui dois atrasos inicialmente desconhecidos. Os parâmetros da função de transferência associada a um determinado paciente são variantes no tempo. Existem pertubações estocásticas agindo sobre este sistemas e restrições clínicas impostas a serem consideradas em relação a taxa de infusão e a pressão arterial média. Estas considerações levam a incorporação de um método de controle adaptativo, ao invés de um controlador com parâmetros constantes, para se obter um desempenho satisfatório [Pajunen et al. 1990].
2.2
Formulação do Problema
Um sistema de infusão automática do medicamento (nitroprussiato) para controle da pressão arterial deve possuir algumas características para produzir uma boa resposta e proporcionar uma certa segurança ao paciente. Desta forma, este sistema deverá possuir algumas restrições, tais como: a pressão não deve ter um undershoot (isto é, máximo valor abaixo da referência) menor que 20 mmHg, o erro de regime de 5 mmHg, e também satisfazer as seguintes condições clinicas [Slate 1980]:
• A taxa de infusão do medicamento deve ser limitada por:
UM≤60WpiMCs−1(ml/h) (2.1)
onde
CAPÍTULO 2. CONTROLE DE PRESSÃO ARTERIAL 6
Wp= peso do paciente(kg)
iM = dose máxima recomendada (10µg.kg−1min−1) Cs = concentração do medicamento (µg/ml).
• para a segurança dos pacientes, a taxa de infusão deve ser reduzida quando houver uma hipotensão, ou seja, uma queda na pressão superior a 20 mmHg abaixo do valor de referência (setpoint).
• a taxa de redução da pressão arterial deve ser limitada em 5-10 mmHg/10 s para
evitar efeitos colaterais indesejáveis como, por exemplo, a diminuição do fluxo sanguíneo.
Um modelo da pressão arterial média (PAM) de um paciente sob a influência do ni-troprussiato de sódio pode ser representado como [Slate 1980].
PAM(k) =y(k) =Po−∆y(k) +v(k) (2.2)
onde∆y é a variação da pressão provocada pela infusão do NPS,v é um ruído
esto-cástico, todos no instantek, ePoé a pressão arterial inicial.
Um modelo contínuo que descreve a relação entre a variação da pressão e a taxa de infusão do medicamento é dado como segue [Pajunen et al. 1990]:
∆y(s) = Kse
−Tis(1+αe−Tcs)
1+τs I(s) (2.3)
ondeI(s)é a taxa de infusão,Ks sensibilidade ao medicamento,αé a constante de
recir-culação,Tié o atraso de transporte inicial,Tcé o atraso de recirculação, eτconstante de
tempo.
O correspondente modelo discreto para este processo pode ser dado pela seguinte equação [Steinmetz 1987]
∆y(k) =q
−d(b
o+bmq−m)
1−a1q−1 I(k);bo>0 (2.4)
ondeq−1representa o operador de atraso. Os parâmetrosb
o,bm,a1,d, emsão obtidos
a partir equação do modelo contínuo (2.3).
CAPÍTULO 2. CONTROLE DE PRESSÃO ARTERIAL 7
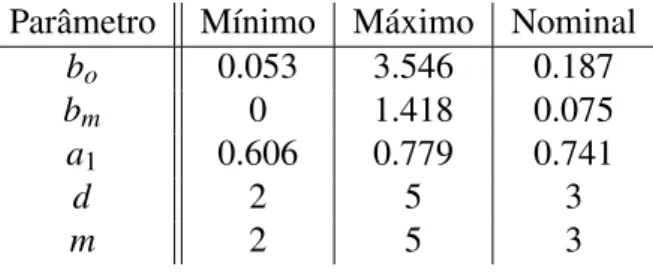
Tabela 2.1: Valores dos parâmetros do modelo discreto da planta para um período de amostragem de 15 s
Parâmetro Mínimo Máximo Nominal
bo 0.053 3.546 0.187
bm 0 1.418 0.075
a1 0.606 0.779 0.741
d 2 5 3
m 2 5 3
A Tabela 2.1 mostra que existe uma diferença considerável nos valores dos parâme-tros, incluindo o atraso natural, para os diferentes pacientes. Para um determinado paci-ente, os atrasos são desconhecidos, mas se assume como uma constante durante um longo período de tempo. Entretanto os parâmetros b0, bm, a1 variam durante o procedimento
de infusão. Assume-se que os parâmetros variam de forma exponencial, e essa variação é modelada como sendo [Steinmetz 1987]:
par(k) =par(0)(2−e−k/γ) (2.5)
Capítulo 3
Controlador Preditivo Generalizado
O Controle Preditivo se refere a uma classe de algoritmos ou técnicas de controle cuja lei de controle é calculada baseada na predição da resposta do processo a ser controlado. As ações de controle são obtidas de forma a minimizar uma dada função de custo. A idéia original do controle preditivo era atender às necessidades da indústria de refino de petróleo, mas vem se difundindo e ganhando aceitabilidade em vários outros setores da indústria, tais como: química, processamento de alimentos, automotiva, aeroespacial, metalúrgica e de papel, [Camacho & Bordons 1998]. Este fato se deve ao desempenho eficaz desses controladores no controle de plantas monovariáveis e multivariáveis, de fase não mínima, com retardo, que são características comuns em processos industriais em geral.
Os controladores preditivos se baseiam na predição do comportamento futuro da planta a ser controlada, e esta predição é feita através do modelo do processo, portanto, este mo-delo é um elemento importante para a eficácia do controlador.
Há diversos algoritmos de controle preditivo já desenvolvidos e utilizados que, ape-sar das muitas semelhanças, também apresentam peculiaridades. Eles podem diferir no modelo do preditor, na função objetivo usada ou na forma de obtenção da lei de controle. Alguns possuem restrições, como o DMC, que impossibilita a sua aplicação para alguns tipos de sistemas.
Dentre os diversos controladores preditivos, há o GPC (Generalized Predictive Con-trol) ou Controlador Preditivo Generalizado surgiu como proposta de um algoritmo de controle preditivo genérico que pudesse resolver os problemas apresentados pelos demais controladores da família MPC (Model Predictive Control) [Camacho & Bordons 1998]. Dentre as características importantes do GPC podemos citar:
1. a possibilidade de obtenção de uma solução analítica da lei de controle para mode-los lineares na ausência de restrições;
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 9
3. a possibilidade de incorporação do tratamento de restrições; 4. a extensão natural para o caso multivariável.
3.1
Introdução ao Controle Preditivo
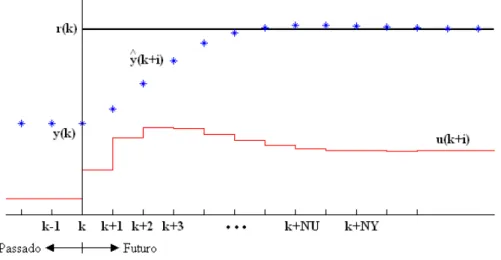
O Controle Preditivo Baseado em Modelo, ou simplesmente Controle Preditivo, foi proposto no fim dos anos 70 e tem-se desenvolvido desde então, [Camacho & Bordons 1998]. O termo Controle Preditivo Baseado em Modelo, ou simplesmente Controle Pre-ditivo, não designa uma estratégia de controle específica, mas um conjunto de métodos de controle que tem uso explícito do modelo do processo e obtém o sinal de controle pela minimização de uma função objetivo, consistindo em uma técnica inerentemente discreta no tempo. A Figura 3.1 ilustra o conceito do controle preditivo no qual uma seqüência de sinais de controle futura é calculada de maneira que a saída predita siga uma determinada trajetória de referência.
Figura 3.1: Conceito de Horizonte de Predição
As variáveis mostradas na Figura 3.1, u(k), y(k) e r(k), representam os valores do sinal de controle, da variável controlada e do sinal de referência, respectivamente. Os valores futuros dessas variáveis podem ser representados pelos vetores:
u= [u(k)...u(k+Nu−1)]T (3.1) ˆ
Y = [yˆ(k+1)...yˆ(k+Ny)]T (3.2)
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 10
Em que: ˆ
y(k+i)representa o valor estimado dey(k)i-passos à frente;
Nyrepresenta o horizonte de predição;
Nurepresenta o horizonte de controle.
A previsão do comportamento futuro da saída do processo é calculada dentro do ho-rizonte de predição Ny. Para isso, é usado um modelo previamente determinado e bem
representativo do processo, bem como um conjunto deNuações de controle a serem
for-necidas ao mesmo.
Obtido o conjunto das ações de controle, apenas o primeiro sinal é aplicado ao pro-cesso, sendo os demais descartados. No instante seguinte todo o processo é repetido, utilizando as informações mais recentemente medidas do sistema. Tal princípio é conhe-cido como "Princípio do Horizonte Móvel", [Camacho & Bordons 1998].
A lei de controle preditiva é obtida através da minimização de uma "Função Obje-tivo"que relaciona as variáveisy, uer. Esta função representa matematicamente a quali-dade do rastreamento da saída predita em relação à trajetória de referência. Um exemplo típico de uma função objetivo pode ser visto em 3.4.
J=
Ny
∑
i=N1
[yˆ(k+j)−r(k+j)]2+λ
Nu
∑
i=1
[∆u(k+i−1)]2 (3.4)
Em que: N1é o horizonte mínimo de predição; Ny é o horizonte de predição;Nu é o horizonte de controle;λé uma ponderação no sinal de controle.
A minimização da função 3.4 em relação a u gera uma seqüência de ações de con-trole num certo horizonte de concon-trole. A seqüência encontrada será ótima com relação à função objetivo e para um determinado instante. Em conseqüência, os valores futuros da diferença entre y e r são minimizados. Se o modelo for fiel ao processo e na ausência de distúrbios ou restrições, a saída do sistema seguirá a trajetória de referência. A Figura 2.2 mostra a estrutura básica do controle preditivo. O modelo é usado para predizer os valores futuros da saída da planta baseados em valores presentes e passados e ainda nas futuras ações de controle ótimas propostas. As ações de controle são calculadas por um otimizador a partir de uma função objetivo que considera o erro de rastreamento futuro e restrições, caso existam.
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 11
Figura 3.2: Estrutura Básica do MPC
quadrática e ausência de restrições. Usar uma função de custo que leve em conta todas as especificações de projeto tornaria a solução muito difícil.
3.2
Formulação do GPC
Utilizando o conceito de horizonte móvel, o Controlador Preditivo Generalizado ou GPC (Generalized Predictive Control) foi proposto por [Clarke et al. 1987] e tem se tornado um dos métodos mais populares na indústria e academia desde então [Clarke et al. 1987]. O algoritmo GPC calcula uma seqüência de ações de controle de forma a minimizar uma função objetivo multi-passo definida em um horizonte de predição e com ponderação na ação de controle.
Os processos de entrada e saída monovariáveis e lineares em geral podem ser descritos por um modelo auto-regressivo, média móvel, com sinal exógeno (ARMAX) conforme mostrado na equação 3.5.
A(q−1)y(k) =q−dB(q−1)u(k−1) +C(q−1)e(k) (3.5)
Onde:
• q−1representa o operador atraso unitário;
• y(k)é a saída do processo;
• u(k)é o sinal de controle;
• dé o retardo natural do sistema em múltiplos períodos de amostragem;
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 12
Os polinômiosA(q−1),B(q−1)eC(q−1)são dados por:
A(q−1) =1+a
1q−1+a2q−2+...+anaq−na
B(q−1) =b
0+b1q−1+b2q−2+...+bnbq−nb
C(q−1) =1+c
1q−1+c2q−2+...+cncq−nc
O ruído em muitas aplicações industriais é um processo estocástico não estacionário que pode desviar a saída do processo do valor de referência. Uma ação integrativa pode ser incorporada ao modelo 3.5 de modo a garantir erro de regime nulo, isto é, manter a saída do sistema na referência. O modelo passa a ser autoregressivo, integral, média móvel com sinal exógeno (ARIMAX) como mostra a equação 3.6.
A(q−1)y(k) =q−dB(q−1)u(k−1) +C(q−1)e(k)
∆ (3.6)
Em que:
∆=1−q−1
Assim, a equação 3.6 também pode ser escrita na seguinte forma:
∆A(q−1)y(k) =q−dB(q−1)∆u(k−1) +C(q−1)e(k) (3.7)
A introdução do polinômioC(q−1)permite a modelagem do ruído, possibilitando uma
predição mais exata. Esta característica dá ao GPC uma grande vantagem sobre os demais controladores preditivos.
A idéia do GPC como qualquer outro controlador preditivo é calcular uma seqüência de ações de controle de forma a minimizar uma função objetivo multi-passo definida num horizonte de predição com ponderação na ação de controle. A equação 3.8 mostra a função objetivo utilizada.
J=
NY
∑
j=N1
δ(i)[yˆ(k+i)−r(k+i)]2+
NU
∑
i=1
λ(i)[∆u(k+i−1)]2 (3.8)
Em que:
• yˆ(k+i) é uma predição ótimo i-passos à frente da saída do sistema, baseada em informações disponíveis até o instante k;
• N1é o horizonte inicial de predição;
• NY é o horizonte máximo de predição;
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 13
δ(i)eλ(i)são seqüências de ponderações no sinal de erro e de controle respectivamente;
r(k+i)é a trajetória de referência futura.
[Clarke et al. 1987] consideraram a ponderação no sinal de erro em 3.8 igual a 1 e a ponderação no sinal de controle constante.
Uma vez que o modelo é linear e causal, podemos considerar o valor predito como uma superposição de duas parcelas, a resposta livre e a resposta forçada, onde:
• A resposta livre consiste na resposta natural do sistema a partir das condições atuais do sistema, ou seja, considerando as ações futuras de controle nulas;
• A resposta forçada é obtida a partir de uma seqüência de ações de controle não-nulas e condições atuais não-nulas.
Tomando o modelo da equação 3.7, considerandoC(q−1) =1 e fazendo∆A(q−1) =
˜
A(q−1), o modelo resultante será:
˜
A(q−1)y(k) =q−dB(q−1)∆u(k−1) +e(k) (3.9)
Que pode ser reescrito como:
y(k) =B(q
−1)
˜
A(q−1)∆u(k−d−1) + e(k)
˜
A(q−1) (3.10)
Então, considerando a equação 3.10 e utilizando a equação diofantina expressa para ˜
A(q−1)como mostra a equação 3.11:
1 ˜
A(q−1) =Ei(q
−1) +q−iFi(q−1)
˜
A(q−1) (3.11)
Ei(q−1) =e
i,0+ei,1q−1+...+ei,i−1q−(i−1) (3.12) Fi(q−1) = fi,0+fi,1q−1+...+fi,i−1q−(na−1) (3.13)
O preditor para o modelo apresentado em 3.10 é dado por:
y(k+i) =B(q−1)E
i(q−1)∆u(k+i−d−1) +Fi(q−1)y(k) +Ei(q−1)e(k+i) (3.14)
Sabendo que o grau do polinômioEi(q−1)é(i−1), tem-se que o termo referente ao
ruído na equação 3.14 diz respeito ao futuro, de forma que a melhor predição dey(k+i)
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 14
ˆ
y(k+i) =Hi(q−1)∆u(k+i−d−1) +F
i(q−1)y(k) (3.15)
Em que: Hi(q−1) =B(q−1)E
i(q−1)
Como o sistema possui um retardo natural de d períodos de amostragem, a saída do sistema só será influenciada pela entradau(k)após (d+1)períodos de amostragem. Com isso, os valores dos parâmetros da função objetivo são definidos como: N1=d+1; NY =d+N eNU =N
O conjunto de predições ótimas dentro do intervalo de predição é:
ˆ
Y(k+d+1) = Hd+1∆u(k) +Fd+1y(k)
ˆ
Y(k+d+2) = Hd+2∆u(k+1) +Fd+2y(k)
... = ... (3.16)
ˆ
Y(k+d+N) = Hd+N∆u(k+N−1) +Fd+Ny(k)
As predições mostradas em 3.14 podem ser reescritas da seguinte forma:
y=Hu+F(q−1)y(k) +H(q−1)∆u(k−1) (3.17)
Em que: y= ˆ
y(k+d+1)
ˆ
y(k+d+2)
... ˆ
y(k+d+N)
;u=
∆u(k) ∆u(k+1)
...
∆u(k)(k+N−1)
;F(q−1) =
Fd+1(q−1) Fd+2(q−1)
...
Fd+N(q−1) ; H=
h0 0 . . . 0 h1 h0 . . . 0
... ... . .. ...
hN−1 hN−2 ... h0 ; ¯ H=
{Hd+1(q−1)−h 0}q
{Hd+2(q−1)−h0−h1q−1}q2
...
{Hd+N(q−1)−h0−h1q−1− · · · −hN−1q−(N−1)}qN
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 15
apenas das matrizesF(q−1)e ¯H , o que nos fornece a equação:
yl=F(q−1)y(k) +H¯∆u(k−1) (3.18)
A resposta livre também pode ser calculada recursivamente através da equação 3.19 [Camacho & Bordons 1998]
yl,i+1=q[1−A˜(q−1)]yl,i+B(q−1)∆u(k−d+i) (3.19)
Em que:
• yl,0=y(k)e∆u(k+i)= 0∀i≥0
• yl,iq−d=yl,i−d
• yl,i∀i<0⇒yl,i=y(k−i)
A resposta forçada é obtida a partir da seqüência futura de ações de controle, o que corresponde à equação 3.20.
yf =
h0 0 . . . 0 h1 h0 . . . 0
... ... . .. ...
hN−1 hN−2 ... h0 (3.20)
Desse modo a resposta completa do sistema será:
y=Hu+yl (3.21) De posse da equação de predição ótima, juntamente com a função objetivo definida, podemos determinar a lei de controle. Para tanto, é conveniente reescrever a função obje-tivo na forma seguinte:
J= (Hu+yl−r)T(Hu+yl−r) +λuTu (3.22) Em que:
r= [ r(k+d+1) r(k+d+2) ... r(k+d+N) ]T
A equação 3.22 pode ser reescrita ainda na forma:
J= 1
CAPÍTULO 3. CONTROLADOR PREDITIVO GENERALIZADO 16
• G=2(HTH+λI)
• bT =2(y
l−r)TH
• f0= (yl−r)T(yl−r)
O objetivo do GPC é, como já foi mencionado anteriormente, minimizar a função objetivo. A minimização é obtida igualando a zero o gradiente deJ em relação au , ou seja, fazendo ∂J
∂u =0.
Visto queJé quadrática, teremos uma solução analítica para o problema:
u=−G−1b= (HTH+λI)−1HT(r−y
l) (3.24)
Como já foi destacado, o GPC obedece o princípio do horizonte móvel, ou seja, so-mente o primeiro elemento do vetor de controle u calculado é aplicado à planta. Tal elemento é dado por:
∆u(k) =K(r−yl) (3.25)
Capítulo 4
GPC Baseado no Preditor de Smith
O Preditor de Smith [Smith 1957] foi o primeiro sistema de controle proposto na literatura que introduz um compensador de atraso. O tal preditor permite melhorar o desempenho de um sistema com atraso em relação a outras técnicas, como por exemplo o PID, principalmente quando o atraso é dominante (maior que duas vezes a constante de tempo dominante do sistema) e bem conhecido.
A estrutura deste preditor está baseada no uso de um preditor Gn(s) no esquema de
controle. Nesta estratégia de controle, realimenta-se a predição da saída do processo no tempot, calculada usando o modelo do processo sem atraso (Gn(s)). Para que o sistema
possa rejeitar erros de modelagem e o efeito das perturbações, realimenta-se a diferença entre a saída do processo e a saída do modelo com atraso (Pn(s) =Gn(s)e−Lsem queLé
o atraso), tal como ilustrado no esquema da Figura 4.1 [Torrico 2007].
Figura 4.1: Estrutura de Controle do Preditor de Smith
Pode ser observado nesta estratégia que:
CAPÍTULO 4. GPC BASEADO NO PREDITOR DE SMITH 18
• como o modelo do preditor não é, em geral, igual ao processo real, é introduzido um
fator de correçãoE, gerado pela diferença entre a saída real e a predita por(Gn(s))
e
• no caso ideal, o erro é zero e o controlador primário C(s) pode ser projetado consi-derando apenas a planta sem o atraso (G(s)).
O Controle Preditivo Generalizado (GPC), [Clarke et al. 1987], tem sido implemen-tado com êxito em muitas aplicações industriais, mostrando um bom comportamento e um certo grau de robustez. Pode resolver muitos problemas de controle para uma ampla gama de plantas com um número razoável de variáveis de projeto que são especifica-das pelo operador dependendo do conhecimento prévio do processo e dos objetivos do controle.
Uma das vantagens do GPC é a possibilidade de ponderar simultaneamente o erro de seguimento e a ação de controle, permitindo assim escolher um comportamento que atenda as especificações do usuário no que se refere ao compromisso comportamento-consumo de energia. Outras vantagens são:
1. o tratamento das restrições nas variáveis de controle e saída da planta; 2. a aplicação em processos de fase não mínima;
3. e, é especialmente interessante se o processo tem atraso, como é o caso do sistema de controle de pressão arterial.
Esta última característica é muito importante visto que os processos com atraso são muito comuns na indústria.
Por outro lado, como toda estratégia de controle baseada em modelo o GPC é for-temente dependente da escolha do modelo do processo e das perturbações utilizados para calcular as predições. Assim a estrutura do preditor tem importância fundamental no comportamento e robustez do sistema em malha fechada, e como foi mostrado em Normey-Rico & Camacho (2000), a correta escolha do preditor pode levar a melhorar consideravelmente a robustez do sistema. Finalmente, uma vez definida a estrutura de predição e a técnica de otimização (que caracteriza a eleição de um controlador predi-tivo específico) ainda devem ser definidas regras de ajuste dos parâmetros que possam ser facilmente interpretadas pelos operadores, e consequentemente utilizadas em ambientes industriais.
CAPÍTULO 4. GPC BASEADO NO PREDITOR DE SMITH 19
GPC proposto em [Clarke et al. 1987] e nas caraterísticas de predição do SP proposto por [Smith 1957] e posteriormente modificado em [Normey-Rico et al. 1997]. Os resultados relacionados com a proposta do SPGPC para o caso SISO podem ser encontradas em [Normey-Rico et al. 1998], sendo que em [Normey-Rico & Camacho 2000] apresenta-se, ainda para o caso SISO, um estudo da robustez do controlador e do ajuste de parâmetros, inclusive comparando o SPGPC com outros controladores preditivos.
Nestes trabalhos, mostra-se como o SPGPC tem um procedimento de ajuste bastante simples para ser utilizado em aplicações reais de processos com atraso onde existem gran-des erros de modelagem, como é o caso do processo aqui analisado. Usando um modelo para predizer o comportamento da planta em um dado horizonte, o controle é calculado a partir da minimização de um critério que considera o erro entre a mencionada predição e a referência, assim como uma ponderação do esforço de controle.
Desta forma, o sistema de controle obtido possui duas partes principais. Na primeira parte ou etapa, calculam-se as predições da saída da planta, usando-se para isto um predi-tor que permite encontrar o valor esperado da saída na presença de perturbações estocás-ticas e, na segunda etapa, o horizonte e as ponderações do erro e do esforço de controle devem ser definidas para a minimização do critério.
4.1
O Algoritmo SPGPC
O Controle Preditivo Generalizado baseado no Preditor de Smith (SPGPC) utiliza o mesmo procedimento de otimização do GPC, mas calcula as predições de forma diferente. Estudos realizados em [Normey-Rico & Camacho 1999], mostram que para processos lineares, estáveis e com atraso as propriedades do GPC podem ser bastante melhoradas, utilizando um preditor de Smith, no lugar do preditor ótimo, para calcular as predições até o instantet+d. Com isto, pode-se obter o mesmo desempenho nominal e melhor robustez que o GPC, principalmente quando existem erros ao estimar o atraso do processo (Como é o caso do sistema de controle de pressão arterial).
O algoritmo SPGPC utiliza, como o GPC, uma seqüência de controles que minimizam uma função de custo:
J=
N2
∑
j=N1
δ(j)[yˆ(k+j|k)−w(k+j)]2+
N
∑
j=1
λ(j)[∆u(k+ j−1)]2 (4.1)
onde N é o horizonte de controle, N1 e N2 são os horizontes de predição, δ(j) e
CAPÍTULO 4. GPC BASEADO NO PREDITOR DE SMITH 20
predição ótima da saída do sistema emk+jcalculada em um tempokusando um modelo
incremental da planta:
∆A(q−1)y(k) =q−dB(q−1)∆u(k−1), (4.2)
e considerando conhecidas as predições da saída aték+d (d representa o atraso do sistema). Nesta equação∆=1−q−1e
A(q−1) =1+a
1q−1+a2q−2+...+anaq−na (4.3)
B(q−1) =b
0+b1q−1+b2q−2+...+bnbq−nb (4.4)
Usando este procedimento e na ausência de restrições, a lei de controle ótima se re-sume na seguinte equação [Normey-Rico et al. 1998]:
∆u(k) =
na+1
∑
i=1
lyiyˆ(k+d−i+1|k) +
nb
∑
i=1
lui∆u(k−1) +
N
∑
i=1
fiw(k+d+i) (4.5)
onde lyi , lui e fi são os coeficientes calculados a partir de ai , bi e do ajuste das
ponderações e horizontes. As predições da saída da planta se calculam usando o mesmo procedimento que no preditor de Smith [Smith 1957]:
1. se calcula a predição ˆy0(k+d−i|k)parai=0,1, ...,nausando o modelo de malha
aberta da plantaA(q−1)y(k) =q−dB(q−1)u(k−1);
2. se corrige cada predição de malha aberta somando a diferença entre a saída do modelo e a do processo, isto é, parai=0,1, ...,na, se calcula:
ˆ
y(k+d−i|k) =yˆ0(k+d−i|k) +y(k−i)−yˆ0(k−i) (4.6)
Para melhorar a robustez do sistema, é possível incluir um filtro passa-baixa F no controlador o qual é utilizado para filtrar o erro entre o modelo e o processoe(i) =y(k−
i)−yˆ0(k−i) antes de somar ao valor da predição em malha aberta [Normey-Rico &
Capítulo 5
Metodologia Multi-Modelo
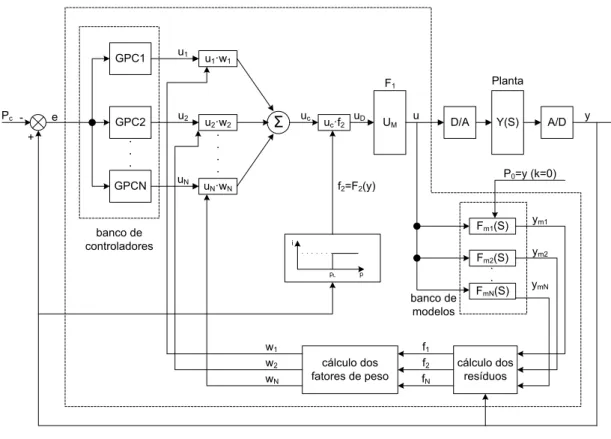
A metodologia desta abordagem consiste em propor uma arquitetura multi-modelo, apresentada na Figura 5.1, a qual baseia-se no pressuposto de que a planta pode ser re-presentada por um número finito de modelos e que, para cada um desses modelos um controlador pode ser projetado a priori [Lainiotis et al. 1971]. Desta forma, um meca-nismo adaptativo é necessário para decidir qual controlador deve ser o dominante para uma determinada planta. Um procedimento para resolver esse problema é utilizar um somatório ponderado, por fatores de peso, das saídas de todos os controladores, onde os fatores de pesos são determinados através de resíduos relativos entre a resposta da planta e as respostas dos modelos.
Na figura 5.1 o erro do sistema é dado por:
e(k) =y(k)−Pc (5.1) ondeké a variável de tempo,Pcé a pressão de referência (setpoint) ey(k)é a pressão de saída do sistema no instantek.
Para a segurança dos pacientes, duas restrições são incorporadas ao sistema. A restri-ção que limita a taxa de infusão do medicamento é dada por:
u=F1(uD) =
(
uD parauD≤UM
UM uD>UM (5.2)
ondeUM é a a taxa de infusão máxima permitida calculada a partir de 2.1.
A outra restrição é utilizada para desligar a infusão do medicamento quando ocorrer hipotensão [Slate 1980] e é dada por:
F2(y(k)) =
(
1 paray(k)≥PL
0 y(k)<PL
CAPÍTULO 5. METODOLOGIA MULTI-MODELO 22
GPC1
GPC2
GPCN
u1·w1
u2·w2
uN·wN u1
u2
uN
Σ uc uc·f2 uD UM D/A Y(S) A/D
Planta
u
Fm1(S)
Fm2(S)
FmN(S)
cálculo dos resíduos cálculo dos
fatores de peso f1 f2 fN ym2 ym1 ymN w1 w2 wN banco de controladores banco de modelos
P0=y (k=0) y Pc
-+ F1 e p i pL
f2=F2(y)
Figura 5.1: Arquitetura GPC Multi-Modelo
ondePL é definido como:
PL=Pc−20 (5.4)
ePcé a pressão de referência (setpoint).
5.1
Banco de Modelos
O banco de modelos em 5.1 consiste de uma série de modelos com parâmetros cons-tantes caracterizando o modelo da planta como um todo, em outras palavras, cobrindo todo o subespaço do modelo da planta [He et al. 1986]. Uma vez que esses modelos deve-rão ter a mesma estrutura que a planta, eles sedeve-rão descritos pela seguinte equação discreta no tempo:
∆ym j(k) = q
−d(b
o j+bm jq−m)
1−a1jq−1 u(k);bo j>0 (5.5)
(j=1, ...,N)
CAPÍTULO 5. METODOLOGIA MULTI-MODELO 23
SPGPC1 u1·w1
u2·w2
uN·wN u1
u2
uN
Σ uc uc·f2 uD UM D/A Y(S) A/D
Planta
u
Fm1(S)
Fm2(S)
FmN(S)
cálculo dos resíduos cálculo dos
fatores de peso f1 f2 fN ym2 ym1 ymN w1 w2 wN banco de controladores banco de modelos
P0=y (k=0) y Pc
-+ F1 e p i pL
f2=F2(y) SPGPC2
SPGPCN
Figura 5.2: Arquitetura SPGPC Multi-Modelo
ym j(k) =∆ym j(k) +P0(j=1, ...,N) (5.6)
e
• ∆ym j(k)é a variação da saída do j-ésimo modelo,
• u(k)é o sinal de entrada do modelo,
• P0é a pressão inicial para cada modelo, a qual é igual a pressão inicial da planta.
O resíduo relativoR2
j(k)em 5.7 foi definido como o erro quadrático normalizado entre
a saída da planta e a saída do modelo.
CAPÍTULO 5. METODOLOGIA MULTI-MODELO 24
5.2
Banco de Controladores
O banco de controladores é formado por uma série de controladores onde para cada modelo, presente no banco de modelos, foi sintonizado um controlador correspondente. Neste trabalho foram desenvolvidos dois diferentes bancos de controladores, onde o pri-meiro é formado por GPCs (Figura 5.1) e o segundo por SPGPCs (Figura 5.2).
5.3
Algoritmo de Controle
Para atingir o desempenho desejável do sistema e garantir a segurança do paciente, o algoritmo de controle deve convergir rapidamente para os valores ótimos e deve ser ro-busto às variações dos parâmetros da planta ao longo do tempo, bem como assegurar uma taxa razoável de variação da pressão arterial. Assim, a lei de controle foi calculada como um somatório ponderado do sinal de controle obtido a partir do banco de controladores, isto é:
uc(k) =
N
∑
j=1
Wj(k)uj(k) (5.8)
onde
• Né o número de modelos;
• uj(k)são as saídas individuais de cada controlador;
• ucé o sinal de controle enviado ao processo;
• Wj(k)são os fatores de peso.
Os fatores de peso são selecionados como segue:
1. Atualização recursiva
W′
j(k) =
exp[−R2j/2V2]Wj(k−1)
N
∑
i=1exp[−R 2
i/2V2]Wi(k−1)
(5.9)
2. limitando a distância do zero
Wj(k) =
( W′
j(k) Wj′(k)>δ
δ W′
j(k)≤δ
CAPÍTULO 5. METODOLOGIA MULTI-MODELO 25
3. Normalização
Wj(k) = [Wj(k)]
2
N
∑
i=1[Wi(k)] 2
(5.11)
onde
• Rj(k)são os resíduos para cada modelo;
• V é um parâmetro que controla a taxa de convergência deW′
j(k)comRj(k);
• δé um limiar para limitar a importância da informação passada.
Capítulo 6
Análise de Resultados
Nesta Seção é feita a análise de desempenho das soluções desenvolvidas no trabalho, comparando os resultados obtidos com o trabalho desenvolvido em [He et al. 1986] e a robustez do controladores preditivos, utilizados no trabalho (GPC e SPGPC), é analisada. O objetivo do controle é levar a pressão dos pacientes ao nível desejado no menor tempo possível. O controlador deve ser suficientemente robusto para compensar as varia-ções entre os o parâmetros dos diferentes pacientes, perturbavaria-ções externas e variavaria-ções no atraso.
6.1
Simulações
Foram realizadas simulações para avaliar o desempenho da metodologia apresentada. O banco de modelos foi construído a partir da tabela 2.1. Foram criados nove modelos, presentes na Tabela 6.1, com o objetivo de representar os diversos tipos de pacientes.
Tabela 6.1: Banco de Modelos
Parâmetros
Modelos bo bm a1 d m
M1 0.053 0 0.606 3 3
M2 0.053 0 0.779 3 3 M3 0.053 1.418 0.606 3 3 M4 0.053 1.418 0.779 3 3
M5 3.546 0 0.606 3 3
M6 3.546 0 0.779 3 3 M7 3.546 1.418 0.606 3 3
CAPÍTULO 6. ANÁLISE DE RESULTADOS 27
ondeMié oi-ésimo.
De forma gráfica o banco de modelos representa um poliedro, onde os modelos do 1 ao 8 representam os vertices e o 9 é o modelo nominal, como pode ser observado na figura 6.1.
Figura 6.1: Poliedro formado pelo banco de modelos
Para cada um desses modelos foram projetados e sintonizados, GPCs para solução MMGPC e SPGCs para a solução MMSPGPC. Os parâmetros de sintonia para os referi-dos controladores das duas soluções propostas no trabalho encontram-se nas Tabelas 6.2 e 6.3. O Controladorifoi sintonizado para o ModeloMi, sendoivariando de 1 ao número de modelos.
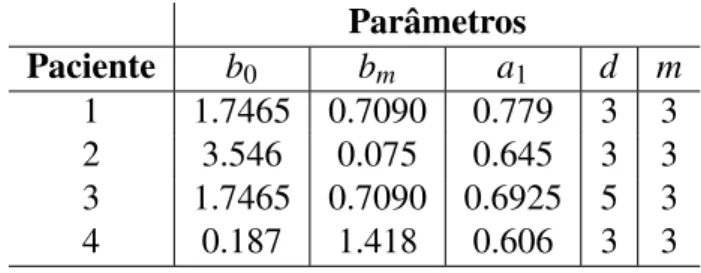
A Tabela 6.4 mostra os parâmetros de diversos pacientes, que não pertencem ao banco de modelos, os quais foram utilizados como modelos, em simulações, para avaliação do desempenho dos controladores propostos no trabalho.
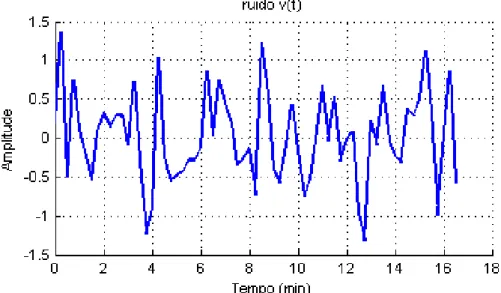
Nas simulações, foram utilizados uma pressão arterial inicial igual a 150mmHge um valor de referência de 100mmHg. Foi utilizado um ruído de medição (v(t)) representado
na Figura 6.2 e foram obtidos resultados para as duas soluções propostas, utilizando todos os pacientes presentes na Tabela 6.4 , como pode ser observado nas Figuras de 6.3 a 6.6. A primeira solução desenvolvida foi o GPC Multi-Modelo e a segunda foi o SPGPC Multi-Modelo.
CAPÍTULO 6. ANÁLISE DE RESULTADOS 28
Tabela 6.2: Sintonia dos Controladores no MMGPC
Parâmetros
Controlador Ny Nu λ
GPC1 10 5 2
GPC2 10 5 2
GPC3 10 5 10
GPC4 10 5 10
GPC5 10 5 20
GPC6 10 5 25
GPC7 10 5 30
GPC8 10 5 50
GPC9 10 5 20
Tabela 6.3: Sintonia dos Controladores no MMSPGPC
Parâmetros
Controlador Ny Nu λ
SPGPC1 5 5 1
SPGPC2 5 5 1
SPGPC3 5 5 5
SPGPC4 5 5 5
SPGPC5 5 5 15
SPGPC6 5 5 20
SPGPC7 5 5 30
SPGPC8 5 5 35
SPGPC9 5 5 20
Tabela 6.4: Pacientes utilizados nas simulações
Parâmetros
Paciente b0 bm a1 d m
1 1.7465 0.7090 0.779 3 3 2 3.546 0.075 0.645 3 3 3 1.7465 0.7090 0.6925 5 3 4 0.187 1.418 0.606 3 3
CAPÍTULO 6. ANÁLISE DE RESULTADOS 29
Figura 6.2: Ruído de Medição
ea1.
Os experimentos demonstram que para pequena ou nenhuma variação paramétrica o GPC Multi-Modelo comporta-se de forma semelhante ao SPGC Multi-Modelo. Porém quando as variações são consideráveis o SPGPC Multi-Modelo apresenta um desempenho superior, realizando o controle com um tempo de estabilização inferior, sem provocar
overshoote com um sinal de controle menos oscilatório, na maioria dos casos.
6.2
Comparação com o Trabalho do He, Kaufman e Rob
Roy
CAPÍTULO 6. ANÁLISE DE RESULTADOS 30
CAPÍTULO 6. ANÁLISE DE RESULTADOS 31
CAPÍTULO 6. ANÁLISE DE RESULTADOS 32
CAPÍTULO 6. ANÁLISE DE RESULTADOS 33
CAPÍTULO 6. ANÁLISE DE RESULTADOS 34
Desta forma, foram realizadas simulações com os mesmos pacientes e condições uti-lizadas neste trabalho [He et al. 1986], onde foram utilizados um controlador do tipo PI para cada modelo presente em um banco de modelos (PI Multi-Modelo). Os pacientes uti-lizados nestas simulações estão presentes na Tabela 6.5, onde foram utiuti-lizados modelos contínuos e sem variação paramétrica, dados pela Equação 2.3.
Tabela 6.5: modelos contínuos de pacientes utilizados em HE et al. 1986
Parâmetros
Paciente Ks Ti Tc α τ
5 9 60 60 0,4 45 6 0,25 60 60 0,4 45 7 9 60 20 0,4 45 8 1,4 60 60 0,4 45
Como estes parâmetros são contínuos, fez-se necessária uma discretização utilizando um período de amostragem de 15 segundos, para encontrar os parâmetros da Equação discreta 2.4 para cada paciente. E estes parâmetros estão na Tabela 6.6.
Tabela 6.6: modelos discretos de pacientes utilizados em HE et al. 1986
Parâmetros
Paciente b0 bm a1 d m
5 2,55 1,02 0,7165 5 4 6 0,07087 0,0283 0,7165 5 4 7 2,55 1,02 0,7165 5 2 8 0,3969 0,1587 0,7165 5 4
Os resultados obtidos a partir dessas simulações estão nas Figuras 6.7, 6.9, 6.8 e 6.10. Os resultados obtidos por [He et al. 1986], para os pacientes citados nesta seção, estão resumidos na Tabela 6.7 em comparação aos resultados obtidos pelas duas soluções desenvolvidas neste trabalho (MMGPC e MMSPGPC). Na referida Tabela encontram-se dois parâmetros de desempenho de sistemas de controle: Tempo de Estabilização (Ts) e o valor máximo do sinal de controleumax.
CAPÍTULO 6. ANÁLISE DE RESULTADOS 35
CAPÍTULO 6. ANÁLISE DE RESULTADOS 36
CAPÍTULO 6. ANÁLISE DE RESULTADOS 37
CAPÍTULO 6. ANÁLISE DE RESULTADOS 38
CAPÍTULO 6. ANÁLISE DE RESULTADOS 39
Tabela 6.7: Comparação de desempenho PI Multi-Modelo, MMGPC, e SPGPC
PI Multi-Modelo MMGPC MMSPGPC
Paciente Ts(min.) umax(ml/h) Ts(min.) umax(ml/h) Ts(min.) umax(ml/h)
6 7 10 10 10 5 7,5
7 7 150 7,5 55 3,5 170
8 6 6 9 5,8 4,5 4,8
9 8 50 10 10,5 5 7,5
6.3
Análise de Robustez
O projeto de sistemas de controle é normalmente baseado em um modelo do processo, seja este obtido por identificação ou pelo equacionamento das leis físicas que regulam o comportamento dinâmico do sistema. Devido às limitações do conhecimento do processo, os modelos utilizados não representam fielmente a dinâmica real. Como consequência, se o projeto do controle é realizado unicamente com base no modelo, o mesmo pode não funcionar como desejado quando opera com o processo real.
Quando um controlador é capaz de controlar um processo mesmo que o modelo usado para o projeto não seja perfeito, se diz que o mesmo é robusto. O grau de robustez do sistema pode ser medido de várias formas, mas é claro que deverá ser maior quanto maiores forem as incertezas ou erros de modelagem do processo, isto para garantir um bom desempenho do sistema.
A primeira ação que deve ser levada em conta no estudo da análise de robustez, de um sistema controle, é aceitar que devido às limitações do conhecimento do processo, os modelos que serão obtidos não representam fielmente a dinâmica real, ou seja, existem sempre erros de modelagem [Cruz 1996].
As figuras 6.11 e 6.12 representam respectivamente o diagrama de blocos do sistema nominal e do sistema real, os quais servirão de auxilio para a análise em questão.
onde:
• r(s)é o sinal de referência;
• e(s)é o é sinal de erro;
• k(s)é a função de transferência do compensador;
• gN é a função de transferência do sistema nominal;
• d(s)é a pertubação refletida na saída da planta;
• y(s)é o sinal de saída;
• n(s)é o ruido de medida;
CAPÍTULO 6. ANÁLISE DE RESULTADOS 40
Figura 6.11: Diagrama de blocos do sistema nominal
Figura 6.12: Diagrama de blocos do sistema real
• gRfunção de transferência do sistema real.
6.3.1
Representação do Erro de Modelagem
Talvez uma das maneiras mais imediatas de representar o erro de modelagem seja através de uma funçãoεA(s)definida por [Lehtomaki 1981] e denominada erro aditivo.
εA(s) =gR(s)−gN(s)
O projetista em geral, não conheceεA(s)(pois, se conhecesse, teriagR(s), mas é capaz de estimar uma funçãoeA(w)tal que
|εA(jw)| ≤eA(w) (∀w∈R)
Portanto,
CAPÍTULO 6. ANÁLISE DE RESULTADOS 41
o que, no Diagrama de Nyquist, pode ser visto como ilustrado na Figura 6.13
Figura 6.13: Diagrama de Nyquist
O erro aditivo, contudo, apresenta um inconveniente. Para isso, considera-se a função de transferência de malha real,gRk(s), e o correspondente erro aditivo
gR(s)k(s)−gN(s)k(s) =ε(s)k(s)
Observa-se assim que o erro aditivo na função de transferência de malha fechada depende dek(s), o que não é conveniente, pois o objetivo do projetista é obterk(s). Seria desejável que o erro dependesse apenas da planta.
Por essa razão, utiliza-se o erro mutiplicativoεM(s), definido por
εM(s) =gR(sg)−gN(s)
N(s) (6.1)
que é uma medida relativa do erro.
Obviamente o erro multiplicativo na função de transferência de malha é o próprio
εM(s)já que
gR(s)k(s)−gN(s)k(s)
gN(s)k(s) =εM(s)
De 6.1 segue-se que
gR(s) = [1+εM(s)]gN(s) (6.2)
o que, na forma de diagrama de blocos, pode ser visto como ilustrado na Figura 6.14 Aqui será admitido que o projetista seja capaz de estabelecer um limite superior para
CAPÍTULO 6. ANÁLISE DE RESULTADOS 42
|εM(jw)| ≤eM(w) ((∀w∈R)) (6.3)
gN(s)
εM(s)
+ +
u(s) y(s)
gR(s)
Figura 6.14: Representação do sistema real na forma de diagrama de blocos
Tipicamente, o comportamento deeM(w)é aquele representado na Figura 6.15, o que
significa, em geral, que os modelos são fiéis em baixas frequências e grosseiros em alta [Cruz 1996] Os erros de modelagem em alta frequências podem estar associados, por exemplo, a dinâmicas deprezadas de atuadores, sensores ou outros elementos de efeito relevante em altas frequências (indutâncias e capacitâncias parasitas, flexibilidades de eixos ou dentes de engrenagens, redução de ordem de modelos, etc.).
Figura 6.15: Comportamento típico deeM(w)
Por fim, é oportuno notar que, como
εM(s) = gεA(s) N(s),
CAPÍTULO 6. ANÁLISE DE RESULTADOS 43
6.3.2
Estabilidade e Robustez
O objetivo do projetista deve ser garantir a estabilidade do sistema real, o que, em vista da forma como o problema foi apresentado aqui, significa assegurar a estabilidade de
cR(s) = gR(s)k(s)
1+gR(s)k(s) (6.4)
para todaεM(s)tal que
|εM(jw)| ≤eM(w) ((∀w∈R))
Supõe-se, é claro, quecN seja estável.
É necessário, neste ponto, fazer uma hipótese adicional acerca degR(s), a saber, a de
que o número de pólos instáveis degR(s)é o mesmo de gN(s). É oportuno lembrar que eta hipótese, embora possa parecer, à primeira vista, de difícil garantia, é, em realidade, admitida implicitamente sempre que se aplica o Critério de Nyquist a um problema prático de estabilidade. Neste caso, o número de pólos instáveis da planta real, em conjunto com o número de envolvimentos do Diagrama de Nyquist em torno do ponto−1+j0, é que permite inferir a estabilidade em malha fechada.
O Critério de Nyquist permite afirmar que cR é estável se e apenas se o número de envolvimentos no sentido anti-horário do diagrama de Nyquist de gR(jw)k(jw)
perma-necer inalterado para todaεM(s)nessas condições (já que se está supondo que o sistema
nominal é estável).
Essa condição é assegurada se e apenas se, ao se deformar continuamente o diagrama de Nyquist desdegN(jw)k(jw) atégR(jw)k(jw), não há cruzamento do ponto −1+j0 (se há cruzamento, o número de envolvimentos se altera).
A condição de não cruzamento do ponto−1+j0 pode ser expressa da seguinte forma:
[1+θεM(jw)]gN(jw)k(jw)6=−1+j0 (6.5)
onde θ∈[0,1]. Note que paraθ=0, o lado esquerdo da equação acima se reduz a
gN(jw)k(jw), ao passo que, paraθ=1, obtém-segR(jw)k(jw). Como
εM:|εM| ≤eM=θεM :|εM| ≤eMeθ∈[0,1]
CAPÍTULO 6. ANÁLISE DE RESULTADOS 44
[1+εM(jw)]gN(jw)k(jw)6=−1+j0 (6.6) ondeεM(jw)é arbitrário, mas tal que
|εM(jw)| ≤eM(w) ((∀w∈R))
Equivalentemente,
1+gN(jw)k(jw) +εM(jw)gN(jw)k(jw)6=0 (6.7)
Como cN é suposta assintoticamente estável, todos os seus pólos se localizam no
SPE aberto e, obviamente, nenhum deles se situa sobre o eixo imaginário. Por isso, 1+gN(jw)k(jw)6=0, o que permite que se reescreva a expressão anterior na forma
1+εM(jw) gN(jw)k(jw)
1+gN(jw)k(jw) 6=0
Ou seja,
1+εM(jw)cN(jw)6=0
É possível mostrar que esta condição é equivalente a
|cN(jw)|< 1
eM(w) (6.8)
que será aqui designada por Condição de Robustez da Estabilidade. A equação acima pode ser reescrita como
eM(w)< 1
|cN(jw)|=
|1+gN(jw)k(jw)|
|gN(jw)k(jw)| (6.9)
Definindo o índice de robustezIR(w)como o segundo termo de 6.9 obtém-se:
IR(w) = |1+gN(jw)k(jw)|
|gN(jw)k(jw)| (6.10)
Pela análise da equação 6.10 tem-se que o IR é calculado pelo inverso da função de transferência em malha fechada do sistema representado pela figura 6.11 e quanto maior for a magnitude do índice de robustez maior será a robustez do controlador. E a condição de estabilidade robusta é dada por:
CAPÍTULO 6. ANÁLISE DE RESULTADOS 45
Onde,δP(jw)é o erro de modelagem.
6.3.3
Robustez do GPC
Para efeito de análise e comparação entre as soluções desenvolvidas no trabalho, fo-ram calculados os índices de robustez para um único GPC para controlar a planta e para um único SPGPC. O objetivo é fazer uma analise da influência do Preditor de Smith na Robustez do sistema. Dessa forma, o índice de robustez para um único GPC contro-lando a planta foi calculado considerando o diagrama de blocos do GPC da Figura 6.16 [Cavalcanti 2008]. Assim, o índice de robustez pra o GPCIRgpc(ejwh)é dado por:
IRgpc(ejwh) =
|1+C(ejwh)Pn(ejwh)Fs(ejwh)|
|C(ejwh)Pn(ejwh)| (6.12)
ondeC(z)é dado por:
C(z) = 1
∆[1+Hs(z−1)z−1]
K C(z) Pn(z
-1 )
Fs(z -1
) +
-R y(z)
u(z)
Figura 6.16: GPC em Malha fechada
k(z) Pn(z-1)
+
-R
y(z) u(z)
Figura 6.17: Sistema de malha fechada
E o máximo erro de modelagemδPfoi calculado da seguinte forma:
δPi=max(MiM−MN N )
CAPÍTULO 6. ANÁLISE DE RESULTADOS 46
• δPié o erro de modelagem referente ao modelo i;
• Mié a função de transferência do modelo i;
• MN é a função de transferência do modelo nominal.
6.3.4
Robustez do SPGPC
Considerando a estrutura do GPC baseado no preditor de Smith (Figura 6.18), esta pode ser reduzida em uma estrutura equivalente a Figura 6.17, e o índice de robustez é dado por [Torrico 2007]:
IRspgpc(ejwh) =
|1+C(ejwh)Gn(ejwh)Fs(ejwh)|
|C(ejwh)Fs(ejwh)Gn(ejwh)| (6.13)
K C(z) Pn(z-1)
Fs(z-1)
+
-R u(z) y(z)
G(z-1) z-d
+ +
+
-Yp(k)
Preditor de Smith
Figura 6.18: Controle preditivo SPGPC
A Figura 6.19 mostra a comparação entre as magnitudes dos índices de robustez do GPC único (equação 6.12) e do SPGPC único (equação 6.13).
Analisando os resultados percebe-se, em todas as faixas de frequência, uma maior magnitude do índice de robustez para a solução envolvendo o SPGPC. Desta forma, percebe-se que ao adicionar o Preditor de Smith ao GPC, formando assim o SPGPC, tornou o controle mais robusto. Porém, ambas as soluções não são robustamente estáveis uma vez que seus índices de robustez não respeitam a condições de estabilidade robusta descrita na Equação 6.11, onde a magnitude dos índices deveria ser maior, em todas as fai-xas de frequências, que o erro de modelagemδP(jw), o que não ocorreu em nenhuma das
CAPÍTULO 6. ANÁLISE DE RESULTADOS 47
Capítulo 7
Conclusões
Os resultados das simulações demonstraram que o esquema multi-modelo calculou de forma satisfatória a sequência de fatores de peso, de tal forma a encontrar o modelo mais próximo do modelo real (menor erro residual); E que ambas as soluções levam a pressão arterial do paciente ao valor de referência, sendo o SPGPC Multi-Modelo mais eficiente que o GPC Multi-Modelo, quando trata-se de sistemas com variações paramé-tricas, uma vez que esse realizou o controle com um tempo de estabilização menor, sem
overshoote com um sinal de controle menos oscilatório, na maioria dos casos apresenta-dos. Os resultados mostraram que este esquema multi-modelo tem um grande potencial em aplicações de sistemas com parâmetros incertos. A estratégia utilizando o SPGPC Multi-Modelo mostrou um bom desempenho para sistemas com incertezas paramétricas e com atrasos consideráveis, como é o caso dos sistemas de controle de pressão arterial. Mesmo na presença de ruídos representativos a metodologia desenvolvida demonstrou um bom resultado.
Referências Bibliográficas
Camacho, E. F. & C. Bordons (1998),Model Predictive Control, Springer, New York. Camacho, E. F. & C. Bordons (2004), ‘Control predictivo: Pasado, presente y futuro’,
Revista Iberoamericana de Automatica e Informatica.
Cavalcanti, A. O. (2008), Análise e Desenvolvimento de Controladores Preditivos Multi-variáveis Baseados em Multi-Modelos Bilineares, Tese de doutorado, Universidade Federal do Rio Grande do Norte.
Clarke, D. W., Mohtadi C. & Tuffs P. S (1987), ‘Generalized predictive control - parts 1 and 2’,IFAC Automatica.
Cruz, J. J. (1996),Controle Robusto Multivariável.
He, W. G., H. Kaufman & R. Roy (1986), ‘Multiple model adaptive control procedure for blood pressure control’,IEEE TRANSACTIONS ON BIOMEDICAL ENGINEE-RING33(1).
Lainiotis, D. G., T. N. Upadhyay & J. G. Deshpande (1971), A non-linear separation theorem,em‘Symp. Nonlinear Estimation Theory’, San Diego, CA, pp. 184–187.
Lehtomaki, N. A. (1981), Pratical Robustness Measures in Multivariable Control Systems Analysis, Tese de doutorado, Cambridge, MA, MIT.
Maitelli, A. L. & T. Yoneyama (1997), ‘Suboptimal dual adaptive control for blood pres-sure management’,IEEE Transactions on Biomedical Engineering44(6).
Martin, J. F., A. M. Schneider, M. L. Quinn & N. T. Smith (1992), ‘Improved safety and efficacy in adaptive control of arterial blood pressure through the use of a supervi-sor’,IEEE Transactions on Biomedical Engineering39(4).
Martin, J. F., N. T. Smith, M. L. Quinn & A. M. Schneider (1982), ‘Supervisory adaptive control of arterial pressure during cardiac surgery’,IEEE Transactions on Biomedi-cal Engineering39.