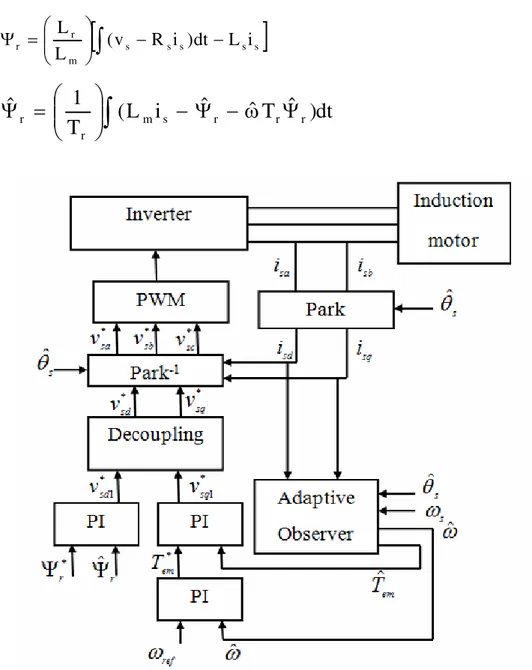
Hardware Implementation of Vector Control of Induction Motor Drive without Speed Encoder Using an Adaptive Luenberger Based MRAS Observer
Texto
Imagem
Documentos relacionados
Design and implementation of Disturbance Observers for realization of state feedback in the context of a rotor being subject to unbalance excitation and gyroscopic effect
Speed Control of 3-Phase Induction Motor Using PIC18 Microcontrollers.. The frequency and speed of the motor, with respect to the input supply, is called the synchronous frequency
This switching strategy combines the advantages of matrix converter with the advantages of direct torque control technique, using a fuzzy speed controller and MRAS speed estimator..
The current control loop consists of a hysteresis current controller (HCC). The block diagram of a hysteresis current controller is shown in Fig. HCC is used to
In this context, the observer presented in this paper consists in an interesting option to estimate the rotor flux and/or rotational speed for sensorless applications involving
When comparing the results between NIP and IP, no significant differences were observed in Si-treated plants, while an increase of about 241% was observed in the Pro amount in
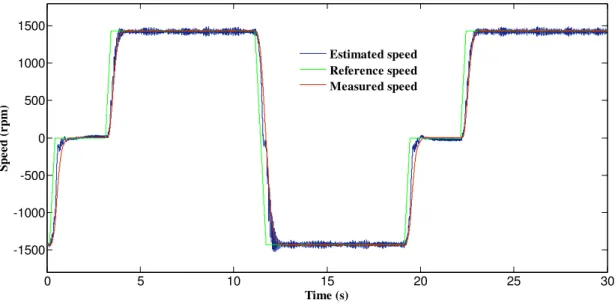
The speed of the motor is compared with its reference value and the speed error is processed in proportional - integral (PI) speed controller. The output of this
This study presents an approach for fault detection and classification in a DC drive system. The fault is detected by a classical Luenberger observer. After the fault detection,
