UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA
Estratégia de Controle Robusto para Filtro
Ativo Paralelo sem Detecção de Harmônicos de
Correntes
Raphaell Maciel de Sousa
Orientador: Prof. Dr. Ricardo Lúcio de Araújo Ribeiro
Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em Engenha-ria Elétrica da UFRN (área de concentração: Automação e Sistemas) como parte dos re-quisitos para obtenção do título de Mestre em Ciências.
Divisão de Serviços Técnicos
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Sousa, Raphaell Maciel de.
Estratégia de controle robusto para filtro ativo paralelo sem detecção de harmônicos de correntes. / Raphaell Maciel de Sousa. - Natal, RN, 2011. 67 f. il.
67 f. il.
Orientador: Ricardo Lúcio de Araújo Ribeiro
Dissertação (mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica.
1. Filtro Ativo - Dissertação. 2. Controle Adaptativo. - Dissertação. 3. Estrutura variável - Dissertação. 4. Princípio do modelo interno - Dissertação. I. Ribeiro, Ricardo Lúcio de Araújo. II. Universidade Federal do Rio Grande do Norte. III. Título.
Estratégia de Controle Robusto para Filtro
Ativo Paralelo sem Detecção de Harmônicos de
Correntes
Raphaell Maciel de Sousa
Agradecimentos
Ao meu orientador, professor Ricardo Lúcio, pela determinação e dedicação ao trabalho, sobretudo por acreditar no meu potencial.
Ao colega e amigo Christian, pela humildade, sabedoria e pelas orientações durante essa caminhada.
Aos professores George, Roberto e Euzeli, que tornaram tudo isso possível, e acima de tudo, ajuram no momento que mais precisei.
À Dolores, pela confiança e apoio durante o período de acomodação em Natal.
À todos os amigos que me apoiaram em Natal, em especial, o amigo Pablo.
Ao amigo Fábio, que sempre esteve presente desde alguns dos momentos mais difíceis, aos melhores momentos da minha vida.
Ao amigo Thyago, pela convivência e amizade durante essa jornada.
À Dona Sâmya, Soares, Aluska e Ricarte. Por serem uma família para mim, e por sempre valorizarem meu trabalho e esforço.
Aos meus tios, Renevaldo, Delourdes e família, pelo acolhimento e investimento nos meus estudos em Cajazeiras.
Ao amigo, Marcos Meira, pelos conselhos e ensinamentos da vida.
À todos os colegas e amigos do LEPER. Laboratório que tenho orgulho de fazer parte.
Aos amigos do LACI, onde comecei.
À todos que fazem o Instituto Federal da Paraíba, Campus Cajazeiras, pelos ensinamen-tos, apoio e convivência.
Ao diretor do INPE, Manoel Jozeane, e à CAPES, pelo apoio financeiro.
Resumo
Resumo: As estratégias de controle convencionais de filtros ativos de potência parale-los (FAPP) empregam esquemas de detecção de harmônicos em tempo real, usualmente implementados com filtros digitais. Isso aumenta o número de sensores na estrutura do filtro, o que resulta em altos custos. Além disso, esses esquemas de detecção introduzem atrasos que podem deteriorar o desempenho da compensação de harmônicos. Diferente-mente dos esquemas de controle convencionais, este artigo propõe uma nova estratégia de controle que regula indiretamente as correntes de fase da rede elétrica. As correntes de referência do sistema são geradas pelo controle de tensão do barramento CC e são baseadas no balanço de potência ativa do sistema FAPP. As correntes de referência são alinhadas com o ângulo de fase do vetor tensão da rede, que é obtido usando um PLL (Phase Locked Loop). O controle de corrente é implementado por uma estratégia de controle adaptativo por alocação de pólos, integrada com um esquema de controle com estrutura variável (V S−APPC). No V S−APPC, o princípio do modelo interno (IMP)
de referência é usado para eliminar o erro em regime permanente das correntes do sis-tema. Isso força as correntes de fase do sistema a serem senoidais e com baixo teor de harmônicos. Além disso, os controladores de corrente são implementados no referencial estacionário para evitar transformações nas coordenadas de referência do vetor tensão da rede. Esta estratégia de controle de corrente melhora a performance do FAPP com uma resposta transitória rápida e robustez a incertezas paramétricas. Resultados experimentais são mostrados para demonstrar a eficácia do sistema de controle proposto para o FAPP.
Abstract
Abstract: Conventional control strategies used in shunt active power filters (SAPF) employs real-time instantaneous harmonic detection schemes which is usually imple-ments with digital filters. This increase the number of current sensors on the filter structure which results in high costs. Furthermore, these detection schemes introduce time delays which can deteriorate the harmonic compensation performance. Differently from the con-ventional control schemes, this paper proposes a non-standard control strategy which in-directly regulates the phase currents of the power mains. The reference currents of system are generated by the dc-link voltage controller and is based on the active power balance of
SAPF system. The reference currents are aligned to the phase angle of the power mains
voltage vector which is obtained by using a dq phase locked loop (PLL) system. The current control strategy is implemented by an adaptive pole placement control strategy integrated to a variable structure control scheme (V S−APPC). In the V S−APPC, the
internal model principle (IMP) of reference currents is used for achieving the zero ste-ady state tracking error of the power system currents. This forces the phase current of the system mains to be sinusoidal with low harmonics content. Moreover, the current controllers are implemented on the stationary reference frame to avoid transformations to the mains voltage vector reference coordinates. This proposed current control strategy enhance the performance of SAPF with fast transient response and robustness to parame-tric uncertainties. Experimental results are showing for determining the effectiveness of
SAPF proposed control system.
Sumário
Sumário i
Lista de Figuras iii
Lista de Símbolos e Abreviaturas vii
1 Estado da Arte 1
1.1 Introdução . . . 1
1.2 Revisão Bibliográfica . . . 1
1.3 Contribuições do Trabalho . . . 5
1.4 Organização do Trabalho . . . 5
2 Descrição e Modelagem do Sistema 7 2.1 Descrição e Modelagem do Sistema . . . 7
3 Esquema de Controle 16 3.1 Esquema de Controle Convencional . . . 16
3.2 Esquema de Controle Proposto . . . 18
3.3 Controle das Correntes de Fase do Barramento CA . . . 19
3.3.1 Método Polonomial . . . 19
3.3.2 Projeto do Controlador pelo Método Polinomial . . . 20
3.4 Controlador de Corrente VS-APPC . . . 22
3.4.1 Projeto do Controlador de Corrente . . . 24
3.5 Controlador de tensão do barramento cc . . . 26
3.5.1 Critério de projeto para o controlador do barramento cc . . . 27
4 Resultados de Simulação 28 4.1 Resultados de Simulação . . . 28
4.1.1 Inicialização do FAPP . . . . 28
4.1.2 Resultados de Simulação Utilizando o Controlador com Ganhos Fixos . . . 29
4.1.3 Resultados de Simulação Utilizando o Controlador de Corrente VS-APPC . . . 36
4.1.4 VS-APPC x Ganhos Fixos . . . 43
5 Resultados Experimentais 48 5.1 Resultados Experimentais . . . 48
5.1.1 Inicialização do FAPP . . . . 48
5.1.2 Desempenho da Estratégia de Controle com Ganhos Fixos . . . . 50
5.1.3 Desempenho da estratégia de controle V S−APPC . . . . 50
6 Conclusões e Perspectivas 62
6.1 Conclusões Gerais . . . 62
Lista de Figuras
1.1 Configurações básicas de filtros ativos de potência paralelo e série . . . . 2
1.2 Filtro ativo híbrido, composto por filtro ativo série e filtro passivo paralelo. 3 1.3 Filtro ativo universal, composto por filtro ativo série e filtro ativo paralelo. 3 2.1 Diagrama básico do sistema com filtro ativo paralelo. . . 7
2.2 Circuito elétrico equivalente do sistema com filtro ativo. . . 8
2.3 Circuito elétrico equivalente do sistema com filtro ativo fazendo Zs=0 e Zl=0. . . 8
2.4 Circuito elétrico equivalente do sistema com filtro ativo fazendo Zs6=0 e Zl→∞. . . 9
2.5 Circuito elétrico equivalente do sistema com filtro ativo fazendo Zs=0 e Zl6=0. . . 11
2.6 (a) Lugar das raízes da função de transferência representada pela Eq 2.37. (b) Imagem ampliada do pólo e zero que estão próximos. . . . 14
2.7 (a) Lugar das raízes da função de transferência representada pela Eq 2.37, com variação da impedância de carga. (b) Imagem ampliada do pólo e zero que estão próximos. . . 15
3.1 Configuração típica do filtro ativo paralelo. . . 16
3.2 Princípio de funcionamento do filtro ativo paralelo. . . 17
3.3 Diagrama de blocos da estratégia de controle convencional. . . 17
3.4 Diagrama de blocos da estratégia de controle utilizada. . . 18
3.5 Diagrama de blocos do controldor de corrente V S−APPC proposto. . . . 24
3.6 Malha de controle das correntes de fase com controlador PI. . . . 25
3.7 Diagrama de blocos da malha de controle de tensão do link-dc. . . 27
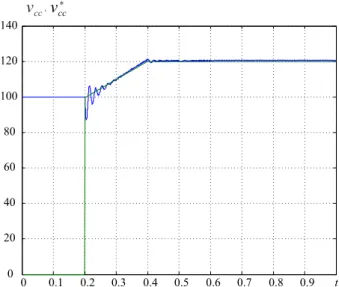
4.1 Resultado de simulação da tensão no barramento CC vcc (em azul) e sua respectiva referência v∗cc (em verde). . . 29
4.2 Resultado de simulação das correntes de fase is1,is2,is3antes da compen-sação de harmônicos imposta pelo FAPP. Controlador com ganhos fixos. 29 4.3 Resultado de simulação das correntes de fase is1,is2,is3 depois da com-pensação de harmônicos imposta pelo FAPP. Controlador com ganhos fixos. . . 30
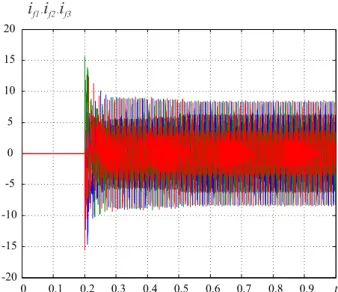
4.4 Resultado de simulação das correntes do FAPP (if 123). Controlador com ganhos fixos. . . 31
4.5 Resultado de simulação das correntes do FAPP (if 123). Controlador com ganhos fixos. . . 31
4.6 Amplitude das correntes de fase is1,is2,is3 durante a compensação de
harmônicos imposta pelo FAPP. Controlador com ganhos fixos. . . . 32
4.7 Corrente de fase isd superposta de sua respectiva referência i∗sd.
Controla-dor com ganhos fixos. . . 32
4.8 Corrente de fase issqsuperposta de sua respectiva referência issq∗. Controla-dor com ganhos fixos. . . 33
4.9 Corrente de fase issd superposta de sua respectiva referência issd∗ durante transitório das correntes da carga. Controlador com ganhos fixos. . . 33
4.10 Corrente de fase issq superposta de sua respectiva referência issq∗ durante transitório das correntes da carga. Controlador com ganhos fixos. . . 34
4.11 Resultado de simulação da tensão no barramento CC vcc e sua respectiva
referência v∗ccdurante transitório das correntes da carga. Controlador com ganhos fixos. . . 35
4.12 Resultado de simulação da tensão no barramento CC vcc e sua respectiva
referência v∗ccdurante mudança de setpoint. Controlador com ganhos fixos. 35
4.13 Resultado de simulação das correntes de fase is1,is2,is3 durante variação
paramétrica no modelo do FAPP. Controlador com ganhos fixos. . . . 36
4.14 Resultado de simulação das correntes de fase is1,is2,is3antes da
compen-sação de harmônicos imposta pelo FAPP. Controlador V S−APPC. . . . 36
4.15 Resultado de simulação das correntes de fase is1,is2,is3 depois da
com-pensação de harmônicos imposta pelo FAPP. Controlador V S−APPC. . . 37
4.16 Transitório das correntes de fase is1,is2,is3 durante a compensação de
harmônicos imposta pelo FAPP. Controlador V S−APPC. . . . 37
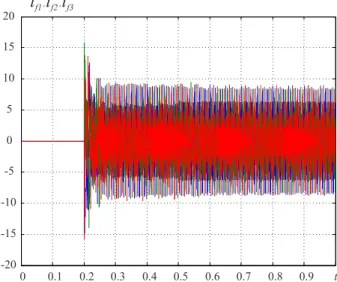
4.17 Resultado de simulação das correntes do FAPP (if 123). Controlador com
ganhos fixos. . . 38
4.18 Resultado de simulação das correntes do FAPP (if 123). Controlador com
ganhos fixos. . . 39
4.19 Corrente de fase isd superposta de sua respectiva referência i∗sd.
Controla-dor V S−APPC. . . . 39
4.20 Corrente de fase issqsuperposta de sua respectiva referência issq∗. Controla-dor V S−APPC. . . . 40
4.21 Corrente de fase issd superposta de sua respectiva referência issd∗ durante transitório das correntes da carga. Controlador V S−APPC. . . . 40
4.22 Corrente de fase issq superposta de sua respectiva referência issq∗ durante transitório das correntes da carga. Controlador V S−APPC. . . . 41
4.23 Corrente de fase issd superposta de sua respectiva estimativabissd. Controla-dor V S−APPC. . . . 41
4.24 Resultado de simulação da tensão no barramento CC vcc e sua respectiva
referência v∗cc.Controlador V S−APPC. . . . 42
4.25 Resultado de simulação da tensão no barramento CC (vcc) e sua
respec-tiva referência v∗ccdurante transitório das correntes da carga. Controlador
V S−APPC. . . . 42
4.26 Resultado de simulação da tensão no barramento CC (vcc) e sua respectiva
4.27 Resultado de simulação das correntes de fase is1,is2,is3 durante variação
paramétrica no modelo do FAPP. Controlador V S−APPC. . . . 44
4.28 Adaptação do ganho p0durante transitório das correntes da carga. . . 44
4.29 Adaptação do ganho p1durante transitório das correntes da carga. . . 45
4.30 Adaptação do ganho p2durante transitório das correntes da carga. . . 45
4.31 Adaptação do ganho p0 durante variação paramétrica da impedância in-terna da fonte primária. . . 46
4.32 Adaptação do ganho p1 durante variação paramétrica da impedância in-terna da fonte primária. . . 46
4.33 Adaptação do ganho p2 durante variação paramétrica da impedância in-terna da fonte primária. . . 47
4.34 Corrente de fase is1superposta de sua respectiva referência i∗s1para ambos os casos com V S−APPC e com ganhos fixos. . . . 47
5.1 Plataforma experimental desenvolvida para o FAPP. . . . 49
5.2 Resultado experimental da tensão no barramento CC (vcc) e sua respectiva referência v∗cc.Controlador com ganhos fixos. . . 49
5.3 Resultado experimental das correntes de fase is1,is2,is3antes da compen-sação de harmônicos imposta pelo FAPP. Controlador com ganhos fixos. 51 5.4 Resultado experimental das correntes de fase is1,is2,is3 depois da com-pensação de harmônicos imposta pelo FAPP. Controlador com ganhos fixos. . . 51
5.5 Amplitude das correntes de fase is1,is2,is3 durante a compensação de harmônicos imposta pelo FAPP. Controlador com ganhos fixos. . . . 52
5.6 Corrente de fase isd superposta de sua respectiva referência i∗sd. Controla-dor com ganhos fixos. . . 52
5.7 Corrente de fase issd superposta de sua respectiva referência issd∗ durante transitório das correntes da carga. Controlador com ganhos fixos. . . 53
5.8 Resultado experimental da tensão no barramento CC (vcc) e sua respectiva referência v∗ccdurante transitório das correntes da carga. Controlador com ganhos fixos. . . 53
5.9 Resultado experimental da tensão no barramento CC (vcc) e sua respectiva referência v∗cc.Controlador com ganhos fixos. . . 54
5.10 Resultado experimental das correntes de fase is1,is2,is3antes da compen-sação de harmônicos imposta pelo FAPP. Controlador V S−APPC. . . . 55
5.11 Resultado experimental das correntes de fase is1,is2,is3 depois da com-pensação de harmônicos imposta pelo FAPP. Controlador V S−APPC. . . 56
5.12 Amplitude das correntes de fase is1,is2,is3 durante a compensação de harmônicos imposta pelo FAPP. Controlador V S−APPC. . . . 56
5.13 Corrente de fase isd superposta de sua respectiva referência i∗sd. Controla-dor V S−APPC. . . . 57
5.14 Corrente de fase issd superposta de sua respectiva referência issd∗ durante transitório das correntes da carga. Controlador V S−APPC. . . . 57
5.16 Resultado experimental da tensão no barramento CC (vcc) e sua respectiva
referência v∗cc.Controlador V S−APPC. . . . 58
5.17 Resultado experimental da tensão no barramento CC (vcc) e sua respec-tiva referência v∗ccdurante transitório das correntes da carga. Controlador V S−APPC. . . . 59
5.18 Resultado experimental da tensão no barramento CC (vcc) e sua respectiva referência v∗cc.Controlador V S−APPC. . . . 59
5.19 Adaptação do ganho p0durante transitório das correntes da carga. . . 60
5.20 Adaptação do ganho p1durante transitório das correntes da carga. . . 60
Glossário
APPC: Adaptive Pole Placement Control CA: Corrente Alternada
CC: Corrente Contínua FAP: Filtro Ativo de Potência
FAPP: Filtro Ativo Paralelo de Potência FPA: Filtro Passa Alta
IMP: Internal Model Principle
LEPER: Laboratório de Eletrônica de Potência e Energias Renováveis MRAC: Model Reference Adaptive Control
PAC: Ponto de Acoplamento Comum PI: Proporcional Integral
PLL: Phase Locked Loop PWM: Pulse-Width Modulation
SOTO: Symetrical Optimum Tuning Optimization THD: Total Harmonic Distortion
UFRN: Universidade Federal do Rio Grande do Norte
Capítulo 1
Estado da Arte
1.1
Introdução
O termo Qualidade da Energia Elétrica pode ser definido como um conjunto de carac-terísticas da energia disponibilizada para o usuário, que em condições normais, garantem a continuidade de fornecimento e características de forma de onda de tensão que permita o adequado funcionamento de equipamentos eletro-eletrônicos [CEI/IEC 1998][IEEE 1993]. Os aspectos que definem a qualidade da energia elétrica podem ser classificados em três categorias: estabilidade da tensão de alimentação, continuidade de fornecimento e forma de onda de tensão [CEI/IEC 1998][IEEE 1993]. Garantir a adequada qualidade da energia elétrica significa compensar ou corrigir os possíveis desvios verificados em relação às características desejadas. Em relação à estabilidade da tensão, devem ser com-pensadas sobretensões ou subtensões, afundamentos de tensão, cintilância, variações do defasamento entre fases e eventuais variações de freqüência. No que se refere à continui-dade de funcionamento, devem ser corrigidas as interrupções de fornecimento de qualquer natureza (momentâneas, temporárias ou duradouras). Quanto à forma de onda, devem ser compensados transitórios, desbalanceamentos e distorções harmônicas. Excluindo-se a segunda categoria que pode ser corrigida com procedimentos de operação no sistema elé-trico, as duas categorias remanescentes se constituem em reais desafios para os esquemas de compensação, normalmente denominado Filtros Ativos de Potência (FAP).
Em relação a estes equipamentos, pela natureza das cargas, que apresentam caracte-rísticas aleatórias de produção de harmônicos, reativos e assimetria, existe uma demanda no que se refere a concepção de FAPs que possuam características de adaptação a estes fenômenos e que sejam viáveis quanto a sua implementação. Nesta direção, este trabalho apresenta um estudo para proposição de uma estrutura alternativa de compensação.
1.2
Revisão Bibliográfica
fil-CAPÍTULO 1. ESTADO DA ARTE 2
tros passivos, para reduzir a poluição provocada pelos harmônicos de corrente é ineficaz. Além disso, padrões e recomendações sobre a qualidade da energia elétrica, tais como: IEC 61000-3-2 [CEI/IEC 1998] e IEEE519 [IEEE 1993] estão mais restritas, o que tem estimulado o uso de técnicas de compensação ativa [Akagi 1994][Singh et al. 1999].
A compensação ativa é normalmente alcançada com a ajuda de conversores chaveados conectados com a rede elétrica, como filtros ativos de potência.
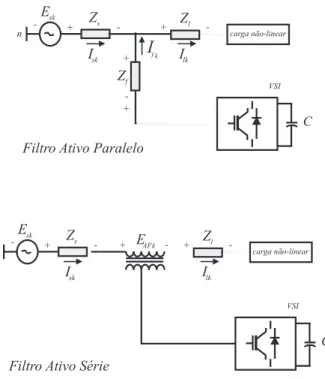
Figura 1.1: Configurações básicas de filtros ativos de potência paralelo e série
Tradicionalmente, os filtros ativos de potência podem ser divididos em série e em paralelo [Akagi 1994][Singh et al. 1999][Akagi 1996]. A figura 1.1 mostra duas configu-rações básicas de filtros ativos série e paralelo. Convencionalmente, os filtros de topologia série são mais adequados para compensação de distorções na forma de onda de tensão (so-bretensões ou subtensões, afundamentos de tensão, cintilância, etc.)[Akagi 1994][Singh et al. 1999][Akagi 1996].
Os filtros paralelos são mais indicados na compensação de distorções nas formas de onda de corrente [Peng et al. 1993][Akagi 1997][Verdelho & Marques 1997]. De uma forma geral, essa definição depende basicamente do tipo de compensação requerida e do local onde o filtro deve ser instalado. Do ponto de vista do local de instalação, estudos têm demonstrado que as cargas que produzem harmônicos (também denominadas de cargas não-lineares) podem ser classificadas em identificadas e não-identificadas [Akagi 1996]. As identificadas referem-se a cargas importantes, eletro-intensivas, quase sempre inte-grantes de grandes complexos industriais. As cargas não identificadas correspondem à composição de vários tipos de consumidores, utilizando sistemas monofásicos ou trifási-cos, conectados no mesmo ponto de acoplamento comum (PAC).
CAPÍTULO 1. ESTADO DA ARTE 3
esquemas de compensação a serem instalados, nesse caso, têm sido determinados com base em dados estatísticos [Morán T. et al. 2002].
Nos últimos anos, vários trabalhos que tratam do estudo dos filtros ativos de potência e suas aplicações têm sido propostos [Akagi 1994][Akagi 1996][Akagi 1997][Peng et al. 1993][Grady et al. 1990][Singh et al. 1999]. Em [El-Habrouk et al. 2000] Habrouk et al. são categorizados diversos tipos de filtros ativos em termos das topologias utilizadas, tipos de compensação e métodos de controle. Combinações de filtros ativos e filtros passivos, denominadas filtros híbridos, foram estudadas e revisadas por Peng em [Peng 2001]. Em [Senini & Wolfs 2002] é descrito um processo para identificar topologias de filtros híbridos e características genéricas, além disso, foram mostradas topologias derivadas de modificações nas conexões dos elementos passivos e ativos.
Isk + - -n Esk +
-Zs Zl
Ilk
carga não-linear
C
VSI + vAF
-Filtro Passivo Paralelo
n’
Figura 1.2: Filtro ativo híbrido, composto por filtro ativo série e filtro passivo paralelo.
A figura 1.2 mostra uma configuração de um filtro ativo série combinado com um fitro passivo formando um filtro híbrido. Estudos foram desenvolvidos com esse tipo de configuração de filtro foram mostrados por Peng [Peng 2001] e Akagi [Akagi 2000].
Isk + - -n Esk +
-Zs Zl
Ilk
carga não-linear + vAF
-Filtro Paralelo
If k
+
-Zf
Filtro Série
Figura 1.3: Filtro ativo universal, composto por filtro ativo série e filtro ativo paralelo.
CAPÍTULO 1. ESTADO DA ARTE 4
filtro ativo universal une as características dos filtros ativos de potência série e paralelo. Em geral, ele é capaz de compensar harmônicos de tensão e de corrente. Dependendo de qual parte do filtro se reposabiliza pelo controle da tensão do barramento CC, estas funções podem ser permutadas. Em [dos Santos et al. 2009] foi mostrada uma topologia de filtro ativo universal para sistemas monofásico-trifásicos composta por um filtro ativo paralelo monofásico, conectado na rede, e um filtro ativo série trifásico, conectado na carga. Essa estrutura é aplicada na compensação de componentes harmônicos e reativos e pode ser empregada em áreas rurais, onde não existam instalações trifásicas. Além disso, técnicas de modulação por largura de pulso (PW M) também foram mostradas para essa topologia.
O comportamento dos filtros ativos em condições de desbalanceamento já foi estu-dado e analisado [Soares et al. 1996][Abellan et al. 1999]. Os esquemas de controle aplicados no controle dos filtros ativos em sistemas trifásicos desbalanceados também fo-ram introduzidos [Jacobinal et al. 1999][Jacobina et al. 2001]. Essas estratégias têm sido empregadas principalmente, considerando-se a compensação de harmônicos com cargas balanceadas ou desbalanceadas. No estágio atual, o filtro ativo de potência em paralelo tem sido mais utilizado na compensação de tais fenômenos. Entretanto, o comportamento aleatório das cargas não-lineares pode introduzir variações paramétricas no modelo dinâ-mico do filtro ativo de potência paralelo (FAPP) ou distúrbios não modelados que reque-rem esquemas de controle robusto.
CAPÍTULO 1. ESTADO DA ARTE 5
1.3
Contribuições do Trabalho
Este trabalho tem como objetivo o desenvolvimento de estudos para proposição de um filtro ativo de potência, em paralelo, que possa ser utilizado em PAC, onde a interação das cargas com a fonte primária produzam alterações significativas no seu modelo dinâmico. Para tanto, é apresentado um modelo dinâmico considerando as impedâncias da carga e da fonte. Nesse modelo, é demonstrado que para determinadas condições de operação das impedâncias da fonte e da carga, os pólos do FAPP podem variar de forma aleató-ria, o que dificulta a aplicação de métodos de controle convencionais, sem esquemas de adaptação. Diferentemente dos esquemas de controle convencionais, o esquema proposto neste trabalho não utiliza métodos de detecção de harmônicos. As correntes de fase são controladas indiretamente, desta forma, é possível reduzir o número de sensores utiliza-dos, já que não é necessário fazer medições das corrente de compensação do filtro ativo. A técnica de controle empregada na regulação das correntes do barramento CA é baseada em um algoritmo dotado de mecanismos de adaptação, que permite aumentar a robustez à incertezas paramétricas ou distúrbios não modelados introduzidos por cargas não-lineares e aleatórias. A estratégia de controle proposta regula os ganhos do controlador, assegu-rando a estabilidade do sistema.
1.4
Organização do Trabalho
Este trabalho é organizado através dos seguintes capítulos: o capítulo 1 trata de uma introdução sobre os conceitos de qualidade de energia, além de uma revisão bibliográ-fica sobre a compensação ativa de problemas causados por componentes harmônicos de corrente e/ou tensão. Também é apresentado um resumo das contribuições deste trabalho. No capítulo 2 será definido um modelo matemático que represente o comportamento dinâmico do filtro ativo paralelo conectado a um PAC onde a interação entre as impedân-cias da fonte e da carga influenciam o seu modelo dinâmico. Estudos teóricos e baseados em ensaios por simulação digital são desenvolvidos para demonstrar que o modelo dinâ-mico do FAPP pode variar em função do comportamento da carga. Além disso, também é mostrado que existem distúrbios não modelados com dinâmicas que são impostas pelo carga não-linear e/ou pelo barramento CA e que, para a obtenção da efetiva compensação do filtro, devem ser compensadas pelas estratégias de controle propostas.
No capítulo 3 é apresentada a fundamentação teórica da estratégia de controle pro-posta neste trabalho. O procedimento de projeto do controlador de corrente utilizado, que se baseia no método de alocação de pólos, é descrito. Para o controle da tensão do barramento CC foi utilizado um controlador proporcional-integral (PI), que teve sua metodologia de projeto formulada com base nos critérios de desempenho requerido.
No capítulo 4 serão apresentados os resultados obtidos através de simulação digital utilizando-se uma plataforma de simulação implementada em linguagem C+ +. Sobre esses resultados são derivadas análises que possibilitam antecipar o comportamento e características de compensação e desempenho da estratégia de controle proposta.
impe-CAPÍTULO 1. ESTADO DA ARTE 6
dâncias podem ser variadas. Esta plataforma foi implementada tomando-se como base os modelos desenvolvidos no capítulo anterior, com a agregação dos modelos do barramento
CC e do inversor de tensão empregados na implementação do FAPP.
Capítulo 2
Descrição e Modelagem do Sistema
2.1
Descrição e Modelagem do Sistema
Figura 2.1: Diagrama básico do sistema com filtro ativo paralelo.
Na figura 2.1 é apresentada a topologia básica de um filtro ativo paralelo. Ela é com-posta por um inversor de tensão conectado ao PAC através de indutores de acoplamento, representados no modelo por uma associação em série de resistores e indutores (rf e lf).
A carga não-linear, empregada neste trabalho, é implementada por um retificador trifásico em paralelo com uma carga linear trifásica, também composta por uma associação em sé-rie de resistores e indutores (rl e ll). O circuito é alimentado por três fontes de tensão
balanceadas (esk com k=1,2,3.) com suas respectivas impedâncias internas
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 8
circuito equivalente por fase do FAPP considerando-se as impedância da carga e da fonte. Neste circuito, a alimentação é representada por uma fonte de tensão Esk conectada em
série com a impedância Zs (rs+sls). A carga é representada por um circuito equivalente
Norton, onde a fonte de corrente Iok representa a corrente distorcida e a impedância Zl
(rl+sll) é a associação de componentes passivos. O filtro ativo é composto por uma fonte
de tensão Vf conectada ao PAC por meio da impedância dos indutores de acoplamento Zf
(rf+slf).
Figura 2.2: Circuito elétrico equivalente do sistema com filtro ativo.
Figura 2.3: Circuito elétrico equivalente do sistema com filtro ativo fazendo Zs =0 e
Zl=0.
Partindo-se do circuito equivalente (figura 2.2), considerando-se o caso em que o bar-ramento é infinito e que a carga pode ser modelada por uma fonte de corrente ideal, ou seja, Zs=0 e Zl→∞, obtém-se o circuito equivalente mostrado na figura 2.3. Neste caso,
aplicando-se as Leis de Kirchhoff, ao referido circuito:
Esk−Zf kIf k−Vf k=0 (2.1)
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 9
Explicitando-se a corrente de filtro If ke substituindo-se em 2.1, obtém-se:
Esk−Zf k(Isk−Iok)−Vf k=0 (2.3)
A partir da equação 2.3 a corrente Isk pode ser escrita como:
Isk =
Esk−Vf k+ZfIok
Zf
(2.4)
A obtenção deste modelo é possível considerando-se que as diferenças de potencial entre o neutro vitual do inversor “0”, o neutro da fonte (n) ou o neutro da carga (n′) podem ser eliminadas admitindo-se que:
3
∑
k=1
isk=
3
∑
k=1
ilk=
3
∑
k=1
iok=0 (2.5)
No modelo apresentado na Eq. 2.3 é importante observar que a sua dinâmica é de primeira ordem, determinada pela impedância dos indutores de acoplamento Zf. No caso
em que a impedância do barramento CA é considerada (Zs 6=0) e a carga é uma fonte de
corrente ideal (Zl→∞), obtém-se o circuito equivalente para o FAPP representado pela
figura 2.4. Neste caso, a equação de malha pode ser escrita como:
Esk−ZskIsk−Zf kIf k−Vf k=0 (2.6)
Substituindo-se a definição de If k, obtida a partir da Eq. 2.1 em 2.6, obtém-se:
Esk−ZskIsk−Zf k(Isk−Iok)−Vf k=0 (2.7)
A corrente Ispode então ser determinada a partir da Eq. 2.7 como:
Is=
Es−Vf+ZfIo
(Zf+Zs)
(2.8)
Figura 2.4: Circuito elétrico equivalente do sistema com filtro ativo fazendo Zs 6=0 e
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 10
Por outro lado, se o barramento CA ainda é considerado como barramento infinito e a carga não é mais modelada como fonte de corrente ideal, o circuito equivalente do FAPP assume o diagrama apresentado inicialmente na Fig. 2.5, dadas por:
Esk−Zf kIf k−Vf k=0 (2.9)
Vf k+ZfIf k−ZlIlk=0 (2.10)
Isk =If k+Ilk+Iok (2.11)
A equação 2.10 pode ser reescrita como:
Ilk =
Vf k+ZfIf k
Zl
(2.12)
Explicitando-se a corrente do filtro, a partir da Eq. 2.11:
If k=Isk−(Ilk+Iok) (2.13)
Substituindo 2.12 em 2.13:
If k=Isk−
µ
Vf k+ZfIf k
Zl
+Iok
¶
(2.14)
Multiplicando ambos os lados da expressão 2.14 por Zl:
ZlIf k=ZlIsk−Zl
µ
Vf k+ZfIf k
Zl
+Iok
¶
(2.15)
Reescrevendo a Eq. 2.15:
ZlIf k=ZlIsk−Vf k−ZfIf k−ZlIok (2.16)
Explicitando-se a corrente do filtro, a partir da Eq. 2.16:
If k=
ZlIsk−Vf k−ZlIok
Zl+Zf
(2.17)
Substituindo a corrente If kobtida em 2.17 na equação de malha 2.9:
Esk−Zf k
ZlIsk−Vf k−ZlIok
Zl+Zf
−Vf k=0 (2.18)
Multiplicando ambos os lados da expressão 2.18 por (Zl+Zf):
¡ Zl+Zf
¢
Esk−Zf k
¡
ZlIsk−Vf k−ZlIok
¢
−¡Zl+Zf
¢
Vf k=0 (2.19)
Reescrevendo a Eq. 2.19:
¡ Zl+Zf
¢
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 11
A partir da Eq. 2.20, a corrente de Isk passa a ser calculada pela expressão 2.21:
Isk=
(Zl+Zf)Esk−ZlVf k+ZfZlIok
ZfZl
(2.21)
Na Eq. 2.21 é importante notar que o sistema tornou-se de segunda ordem. Neste caso, os pólos são função da impedância da carga (Zl), que pode variar de forma aleatória.
Figura 2.5: Circuito elétrico equivalente do sistema com filtro ativo fazendo Zs =0 e
Zl6=0.
Finalmente, se consideramos a interação entre impedância do barramento CA e a im-pedância da carga (figura 2.2), as equações de malha são então dadas:
Esk−ZskIsk−Zf kIf k−Vf k=0 (2.22)
Isk =If k+Ilk+Iok (2.23)
Vf k+ZfIf k−ZlIlk =0 (2.24)
A expressão 2.24 pode ser reescrita como:
ZlIlk=Vf k+ZfIf k (2.25)
A partir da Eq. 2.25 a corrente Ilk pode ser calculada como:
Ilk =
Vf k+ZfIf k
Zl
(2.26)
Substituindo a corrente Ilk,dada pela Eq. 2.26 na Eq. 2.23:
Isk =If k+
Vf k+ZfIf k
Zl
+Iok (2.27)
Multiplicando ambos os lados da Eq. 2.27 por Zl:
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 12
Explicitando-se a corrente do filtro, a partir da Eq. 2.28:
If k=
ZlIsk−ZlIok−Vf k
Zl+Zf
(2.29)
Substituindo a corrente If kobtida em 2.29 na equação de malha 2.22:
Esk−ZskIsk−Zf k
µ
ZlIsk−ZlIok−Vf k
Zl+Zf
¶
−Vf k=0 (2.30)
Multiplicando ambos os lados da Eq. 2.30 por (Zl+Zf):
¡ Zl+Zf
¢ Esk−
¡
Zl+Zf
¢
ZskIsk−Zf k
¡
ZlIsk−ZlIok−Vf k
¢
−¡Zl+Zf
¢
Vf k=0 (2.31)
Explicitando-se a corrente do filtro, a partir da Eq. 2.31:
Isk=
(Zl+Zf)Esk−ZlVf k+ZfZlIok
ZfZl+ZlZs+ZfZs
(2.32)
Nas equações 2.21 e 2.32 o comportamento da corrente Is é descrito por um sistema
dinâmico de segunda ordem. No primeiro, a localização dos pólos do sistema é modi-ficada somente pela impedância da carga Zl. No segundo caso, a localização dos pólos
é afetada por ambas as impedâncias da fonte e da carga. Definindo-se o polinômio∆(s)
dado por:
∆(s) =ZfZl+ZlZs+ZfZs (2.33)
A equação 2.32 pode então ser reescrita como:
Isk =
(Zl+Zf)Esk
∆(s) −
ZlVf k
∆(s) +
ZfZlIok
∆(s) (2.34)
Da equação 2.34, é possível verificar que para controlar a corrente Is é necessário
gerar uma tensão de filtro Vf capaz de impor a corrente Is, no referencial desejado, bem
como, compensar as perturbações impostas pela carga e pelo barramento CA. Os termos que representam as perturbações não-modeladas podem ser reescritos como:
Iek=
(Zl+Zf)Esk
∆(s) (2.35)
e
Iok′ = Z∆fZlIok
(s) (2.36)
Na Eq. 2.35 o sinal de entrada é senoidal (Esk), proveniente da fonte de alimentação.
No termo de perturbação representado pela Eq. 2.36, a entrada é uma fonte de corrente
Iok que contém componentes harmônicos de corrente gerados pela carga não-linear.
Fazendo Is′=Is−Ie−Io′ e introduzindo os valores das impedância Zs=rs+sls, Zf =
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 13
Is′(s)
Vf(s)
=−Z∆lVf
(s) =−
rl
γ2
(1+sll
rl) s2+γ1
γ2s+γ0γ2
(2.37)
ondeγ2=lllf+llls+lfls,γ1=rllf+rfll+rlls+rsll+rfls+rslf eγ0=rlrf+rlrs+rfrs.
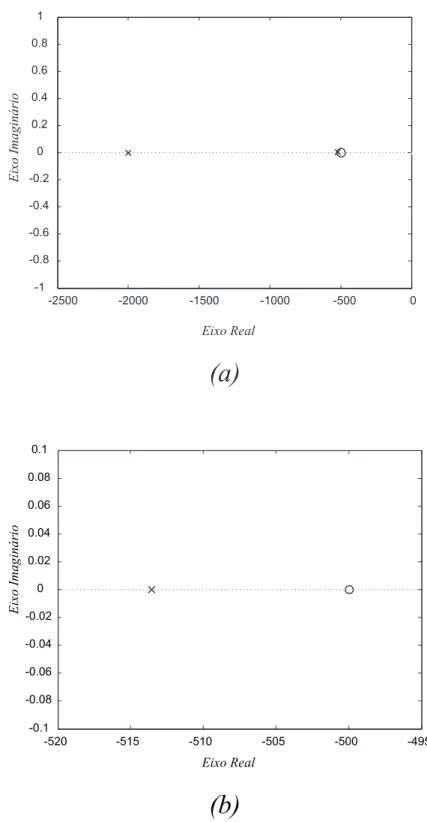
Note que a planta do filtro dada pela equação 2.37 tem dois pólos e um zero. Os valores dos parâmetros usados neste trabalho são Zs= (0.2+s0.0001)Ω, Zf = (2+s0.001)Ωe
Zl = (100+s0.2)Ω. Com estes valores, os pólos do polinômio característico ∆(s) são
k1=−502 e k2=−2000, e o zero é z=−500. Para o caso em que as impedâncias Zl
e Zs não variam, existem na proximidade do pólo k1 um zero. Nestas condições pode-se considerar que há um cancelamento de pólo e zero. Assim, o modelo do sistema pode ser aproximado por uma função de primeira ordem , cuja função de transferência é dada por:
Is′(s)
Vf(s)
=− bs
s+as
(2.38)
onde as=2000 e bs≃ −909.
No caso em que as impedâncias da fonte primária (Zs) ou da carga (Zl) variam, a
aproximação dada pela Eq. 2.38 não é mais verdade. Considere o caso onde ocorra uma variação da impedância da carga (Zl), de tal forma que a nova impedância (Zl2)
seja apenas 5% do valor nominal de Zl, ou seja, Zl2= (5+s0.01)Ω. As figuras 2.6-2.7
mostram os lugares de raízes da função de transferência Eq. 2.37. Na figura 2.6 (b), para a impedância de carga igual a Zl, é possível notar que o pólo e o zero estão próximos,
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 14
CAPÍTULO 2. DESCRIÇÃO E MODELAGEM DO SISTEMA 15
Capítulo 3
Esquema de Controle
3.1
Esquema de Controle Convencional
Figura 3.1: Configuração típica do filtro ativo paralelo.
Considere o diagrama unifilar de um filtro ativo de potência paralelo mostrado na figura 3.1. O inversor de tensão está conectado ao PAC através da impedância Zf, a
fonte primária possui uma impedância interna representada por Zs, e Zl é a impedância
da carga não-linear. Em [Akagi 1994] foi introduzido o princípio básico de compensação de componentes harmônicos de corrente utilizando um filtro ativo de potência paralelo. Aplicando a lei de Kirchhoff das correntes no PAC (figura 3.1) obtém-se:
Isk=Ilk−If k (3.1)
Observa-se na equação 3.1 que para IFk=0, que corresponde ao sistema sem o FAPP,
a corrente da fonte primária é igual a corrente da carga (Isk =Ilk). Neste caso, a forma
de onda de Isk é distorcida. Assim, para corrigir esse problema, o FAPP injeta uma
corrente de compensação (If k) no PAC capaz de cancelar os harmônicos produzidos pela
carga não-linear. A figura 3.2 demonstra graficamente um caso ideal do princípio de compensação do filtro ativo de potência paralelo.
CAPÍTULO 3. ESQUEMA DE CONTROLE 17
E sk
ilk
i sk
i fk
Figura 3.2: Princípio de funcionamento do filtro ativo paralelo.
em uma amplitude constante. Essa tensão é chaveada pelo V SI de forma que a corrente de compensação (If k) é injetada no PAC através da impedância do filtro (Zf). Assim, o
controle dos níveis da tensão no barramento CC influencia diretamente no desempenho da compensação.
Figura 3.3: Diagrama de blocos da estratégia de controle convencional.
Normalmente, as estruturas de controle convencionais utilizam detecção dos compo-nentes harmônicos que se deseja compensar. A figura 3.3 mostra o diagrama de blocos de um esquema de controle aplicado ao filtro ativo de potência paralelo. Neste esquema, os componentes harmônicos são extraídos utilizando-se um filtro passa alta (FPA). Para isso, as correntes da carga (il123) são medidas e seus valores instantâneos passam pelo
bloco 123/dq,que realiza a transformação ortogonal de trifásico para dqe, convertendo
il123 em ieldq. Onde o sobrescrito “e” corresponde ao referencial estacionário do vetor
ten-são. O ângulo de fase do vetor tensão da rede elétrica (θs) é determinado utilizando-se um
phase locked loop (PLL). Após a transformação ortogonal, as correntes ieldq passam pelo
FPA, que extrai os componentes harmônicos de alta frequênciaiee
ldq. A tensão do
CAPÍTULO 3. ESQUEMA DE CONTROLE 18
passa pelos controladores Ri, que por sua vez, geram as tensões de referência do inversor
vef dq∗ . Essas tensões são transformadas em tensões trifásicas v∗f 123pelo bloco dq/123, em seguida, uma estratégia PW M convencional determina os tempos de condução das chaves de potência do V SI.
Neste esquema de controle, a detecção de harmônicos através de filtros digitais in-troduz atrasos que podem prejudicar o desempenho da estratégia de compensação. Além disso, são necessários sensores para realização da medição de cada uma das correntes da carga il123, o que pode elevar o custo final do equipamento. Desta forma, este
tra-balho propõe um esquema de controle que não utiliza detecção de harmônicos e regula indiretamente as correntes de fase (is123) da rede elétrica.
3.2
Esquema de Controle Proposto
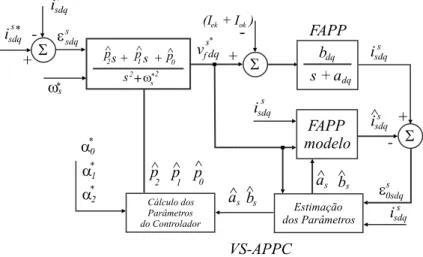
Figura 3.4: Diagrama de blocos da estratégia de controle utilizada.
Na figura 3.4 é apresentado o diagrama de blocos do esquema de controle proposto para o filtro ativo de potência paralelo. Neste diagrama, a tensão do barramento CC é regulada por um controlador proporcional-integral (PI) com anti−windup.O regulador de tensão gera o módulo do vetor de referência de corrente iss∗, que determina o com-ponente de potência ativa do sistema. O ângulo de fase do vetor tensão da rede elétrica (θs) é determinado utilizando-se um PLL. Assim, as correntes de referência das fases em
dqs podem ser obtidas por issd∗ =iss∗cos(θs) e issq∗=iss∗sin(θs), respectivamente. Onde o
sobrescrito “s” corresponde ao referencial vetor tensão. Nesta estrutura de controle, o fator de potência é regulado em torno da unidade, já que as referências são geradas em fase com o vetor tensão. Caso exista a necessidade de flexibilização do fator de potência, uma possível saída seria extrair do PLL o ânguloθs, e as referências seriam obtidas por
isds∗=iss∗cos(θs+ϕ)e isqs∗=iss∗sin(θs+ϕ), onde o incremento de ânguloϕ, determinaria o
fator de potência do sistema. No esquema de controle convencional (figura 3.3) é possível definir o fator de potência alterando o valor de referência da corrente no eixo q (iesq∗).
não-CAPÍTULO 3. ESQUEMA DE CONTROLE 19
modelados isedq e is0dq′ (Eq. 2.35-2.36) podem ser estimados e introduzidos no algoritmo de controle. O bloco xsdq/123 realiza a transformação ortogonal do referencial dqs para o referencial trifásico. Ele é usado para converter as tensões vsf dq′∗ para as tensões vsf 123′∗ . Baseado nestas tensões de referência, uma estratégia de modulação PW M convencional é utilizada para determinar os tempos em que as chaves do V SI permanecem ligadas ou desligadas.
A estratégia de controle proposta (figura 3.4) não requer esquema de detecção de harmônicos, desta forma, o número de sensores necessários pode ser reduzido, o que pode diminuir o custo final do equipamento.
Na estrutura de controle convencional mostrada na figura 3.3, o fato de se utilizar detecção de harmônicos permite que este esquema seja capaz de compensar componentes harmônicos em frequências específicas. Já na estrutura proposta não foi introduzida essa flexibilidade, os componentes harmônicos que serão compensados são determinados pela largura de banda definida pelo controlador da malha de corrente.
3.3
Controle das Correntes de Fase do Barramento CA
A estrutura de controle proposta para a malha de corrente é concebida com base no método polinomial. Este método foi escolhido em virtude de ser um procedimento sim-ples para determinação dos ganhos dos referidos controladores. Adicionalmente, consi-derando os parâmetros da função de transferência do FAPP (Eq.2.38) desconhecidos, ou conhecidos com incertezas, serão utilizados esquemas com estrutura variável para estimá-los.
3.3.1
Método Polonomial
Considere uma planta monovariável (Single In Single Out - SISO), linear e invariante no tempo (Linear Time-Invariant - LIT ):
Y(s) =G(s)U(s) = Z(s)
R(s)U(s) (3.2)
onde a função de transferência G(s)é estritamente própria (grau do denominador>grau do numerador) e R(s) é um polinômio mônico. Deseja-se que para um sinal de entrada
U(s), os pólos em malha fechada da Eq. 3.2 sejam os pólos de um polinômio mônico
Hurwitz (raízes com parte real negativa) A∗(s). A escolha deste polinômio define o de-sempenho requerido. Considerando a lei de controle:
Qm(s)L(s)U(s) =−P(s)Y(s) +M(s)R(s) (3.3)
e aplicando-se a Eq. 3.3 na função de transferência descrita pela Eq. 3.2, obtém-se a seguinte função de transferência em malha fechada:
Y(s)
R(s) =
M(s)
Qm(s)L(s)
µ
Z(s)Qm(s)L(s)
Qm(s)L(s)R(s) +P(s)Z(s)
¶
CAPÍTULO 3. ESQUEMA DE CONTROLE 20
eliminando-se o termo Qm(s)L(s)do numerador e denominador da Eq. 3.4:
Y(s)
R(s) =
M(s)Z(s)
Qm(s)L(s)R(s) +P(s)Z(s)
(3.5)
onde R(s)é um polinômio conhecido de grau n e Z(s)possui grau <n. Os polinômios P(s),L(s)(Considerando L(s)mônico) e M(s)possuem graus n+q−1,n−1 e n+q−1, respectivamente. Qm(s) é o modelo interno de R(s) e possui grau q. De acordo com o
este princípio, para rastrear um sinal, o sistema deve ser capaz de gerá-lo. Assim, para uma entrada em degrau tem-se Qm(s) =s, já no caso em que a entrada é uma rampa
Qm(s) =s2.
A equação característica obtida a partir da função de transferência em malha fechada (Eq. 3.5) é:
Qm(s)L(s)R(s) +P(s)Z(s) =0 (3.6)
logo, o objetivo do controle se resume a obter os polinômios L(s)e P(s),tal que:
Qm(s)L(s)R(s) +P(s)Z(s) =A∗(s) (3.7)
onde o grau de A∗(s)é igual a 2n+q−1.
Como Qm(s)R(s) e Z(s) são polinômios coprimos [Ioannou 1996], então existem
P(s)e L(s)(solução única) que satisfazem a equação diofantina (3.7):
Y(s) = M(s)Z(s)
A∗(s) R(s) (3.8)
3.3.2
Projeto do Controlador pelo Método Polinomial
Considere o modelo do FAPP como sendo de primeira ordem dado por:
Y(s) = Z(s)
R(s)U(s) =I
s
sdq(s) =−
bs
s+as
Vf dqs′ (s) (3.9)
admitindo-se que o sistema deve ser controlado para um sinal de referência senoidal dado por:
r=rp·sen(ωst+φ) (3.10)
onde rp é a amplitude, ω=2πf é a frequência angular e φ é a fase do sinal senoidal.
A partir do princípio do modelo interno, para o sinal de entrada descrito pela Eq. (3.10), obtém-se o seguinte polinômio Qm(s) =s2+ω2s. Assim, com base em (3.9),
determinam-se os graus dos polinômios Qm(s), L(s)(Considerando L(s)mônico), P(s), M(s)e A∗(s)
como sendo q=2, n−1=1−1=0, n+q−1=1+2−1=2, n+q−1=1+2−1=2 e 2n+q−1=2+2−1=3, respectivamente. Desta forma, uma escolha adequada para os polinômios é:
CAPÍTULO 3. ESQUEMA DE CONTROLE 21
R(s) =s+as (3.12)
Qm(s) =s2+ω2s (3.13)
L(s) =l (3.14)
P(s) = p2s2+p1s+p0 (3.15)
A∗(s) =s3+α∗2s2+α∗1s+α∗0 (3.16) Resolvendo a Eq. 3.7 para a função de transferência do FAPP descrita pela Eq. (3.9) obtém-se:
¡
s2+ω2s¢l(s+as) +
¡
p2s2+p1s+p0
¢
(−bs) =s3+β2s2+β1s+β0 (3.17)
após efetuar as multiplicações dos termos do lado esquerdo da Eq. 3.17 encontra-se:
ls3+lω2ss+lass2+lasω2s−p2bss2−p1bss−p0bs=s3+β2s2+β1s+β0 (3.18)
isolando os termos comuns da Eq. (3.17), resulta em:
ls3+ (las−p2bs)s2+
¡
lω2s−p1bs
¢
s+¡lasω2s−p0bs
¢
=s3+β2s2+β1s+β0 (3.19)
a partir da Eq. (3.19) utilizando identidade polinomial, a solução para o sistema é tal que:
l=1 (3.20)
as−p2bs=α∗2=⇒p2=
as−α∗2
bs
(3.21)
ω2
−p1bs=α∗1=⇒p1= ω2
s−α∗1
bs
(3.22)
asω2s−p0bs=α∗0=⇒p0=
asω2s−α∗0
bs
(3.23)
No caso em que os parâmetros da planta (ase bs) sejam desconhecidos ou conhecidos
com incerteza, se faz necessária a utilização de uma técnica de estimação [Ioannou 1996]. Substituindo os parâmetros da planta as e bs por suas respectivas estimativasabs ebbs, os
ganhos do controlador passam a ser calculados por:
b p2= b
as−α∗2
b bs
CAPÍTULO 3. ESQUEMA DE CONTROLE 22
b p1=
ω2−α∗ 1
b bs
(3.25)
b p0= b
asω2−α∗0
b bs
(3.26)
Note que nas Eqs. (3.24)-(3.26) os ganhos se adaptam em função das estimativas dos parâmetros da planta. Desta forma, caso ocorram variações ou existam incertezas paramétricas, os ganhos do controlador são recalculados afim de manter a estabilidade.
Para determinação das estimativas dos parâmetros da planta (abs ebbs) podem ser
uti-lizados diversos métodos de estimação on−line. Neste trabalho, esses parâmetros serão
estimados segundo leis chaveadas [Utkin 2003], visto que são mais simples de serem implementadas, se comparadas aos métodos tradicionais como mínimos quadrados ou técnicas baseadas em funções de custo, entre outros.
3.4
Controlador de Corrente VS-APPC
Considere o modelo de primeira ordem do FAPP (ver Eq. 2.38) descrito por:
dissdq
dt =−asi
s
sdq−bsvs
′∗
f dq (3.27)
Uma lei adaptativa pode ser obtida para gerar as estimativas bas e bbs usando os sinais
observados vssdq′ e issdq′ . Considerando uma constante positiva arbitrária am>0, é possível
reescrever Eq. (3.27) adicionando e subtraindo o termo amissdq como:
dissdq
dt =−asi
s
sdq−bsvs
′∗
f dq+amissdq−amissdq (3.28)
Isolando os termos comuns, a equação (3.28) pode ser reescrita:
dissdq
dt =−ami
s
sdq+ (am−as)i s
sdq−bsv s′∗
f dq (3.29)
Aplicando a transformada de laplace em (3.29) obtem-se:
sIsdqs (s) =−amIsdqs (s) + (am−as)Isdqs (s)−bsVs
′∗
f dq(s) (3.30)
Reescrevendo,
(s+am)Isdqs (s) = (am−as)Isdqs (s)−bsVs
′∗
f dq(s) (3.31)
Logo, a expressão (3.29) no domínio da frequência é:
Isdqs (s) = 1
s+am
h
(am−as)Isdqs (s)−bsVs
′∗
f dq(s)
i
CAPÍTULO 3. ESQUEMA DE CONTROLE 23
Com Isdqs (s) =£(issdq(t))e Vsdqs′∗ (s) =£(vsdqs′∗ (t)). Substituindo os parâmetros as e bs por
suas estimativasabs ebbs, obtém-seIbisdqs (s):
b
Isdqs (s) = 1
s+am
h
(am−bas)Isdqs (s)−bbsVs
′∗
f dq(s)
i
(3.33)
CombIisdqs (s) =£(bissdq(t)). Assim, a equação (3.60) pode ser reescrita como:
(s+am)bIisdqs (s) = (am−bas)Isdqs (s)−bbsVs
′∗
f dq(s) (3.34)
aplicando a transformada inversa de laplace:
dbissdq
dt =−amib
s
sdq+ (am−bas)issdq−bbsvs∗
′
f dq (3.35)
o modelo obtido é mais complexo, porém, é possível ajustar a taxa de convergência dos parâmetros [Ioannou 1996]. O erro de estimação pode ser definido por:
ε0dq=issdq−bissdq (3.36)
No esquema de controle do APPC indireto convencional, leis adaptativas acionadas pelos erros ε0dq são usadas para gerar as estimativas abs e bbs. No esquema de controle
proposto, os parâmetros as e bssão estimados usando as seguintes leis de chaveamento:
b
as=−assgn(ε0dqissdq) (3.37)
bbs=bssgn(ε0dqvs∗
′
f dq) +bs(nom) (3.38)
Desde que as seguintes restrições sejam satisfeitas: as>|as|e bs >
¯
¯bs−bs(nom)
¯ ¯. Onde
bs(nom)é o valor nominal de bs[Jr. et al. 2004]. Pode-se garantir queε0d=ε0q=0 e esses
são os pontos de equilíbrio globalmente e assintoticamente estáveis. A alocação de pólos e o controle realizado pelo V S−APPC proposto são alcançados por meio da seguinte lei
de controle:
Qm(s)L(s)Vs∗
′
f dq(s) =−P(s)(Isdqs (s)−Isdqs∗ (s)) (3.39)
O que determina a seguinte de função de transferência para os controladores:
Tsdq(s) =
P(s)
Qm(s)L(s)
(3.40)
Para o modelo de primeira ordem do FAPP (ver Eq. 2.38) e considerando que o algoritmo do V S−APPC é implementado no referencial estacionário, o que resulta uma corrente de
referência senoidal.
A partir dos polinômios definidos nas Eqs. (3.11)-(3.16) e utilizando os ganhos do controlador calculados pelas Eqs. (3.24)-(3.26), obtém-se a seguinte função de transfe-rência do controlador V S−APPC
Tsdq(s) = b
p2s2+bp1s+pb0
s2+ω2
s
CAPÍTULO 3. ESQUEMA DE CONTROLE 24
O sinal de controle vsf dq∗′ gerado pela saída do V S−APPC pode ser determinado usando
Eqs. (3.40) como:
dxs1 dt =x
s
2+bp1εssdq (3.42)
dxs2
dt =−ω
2
sxs1+ (pb0−ω2sbp2)εssdq (3.43)
vsf dq∗′ =xs1+bp2εssdq (3.44) O diagrama de blocos da implementação V S−APPC para o controle de corrente do FAPP
é apresentado na Fig. 3.5. Neste diagrama, o modelo do FAPP gera a estimativa da corrente de fase da rede elétricabissdq. O sistema de controle regula a corrente de fase
issdq e compensa os distúrbios não-modelados (Eqs. 2.35 e 2.36). A comparação entre a corrente estimadabissdq e o erro de medição da corrente de fase issdq é usado para calcular o erro de estimaçãoε0dq. Esses erros associados com as entradas vsf dq∗′ ebissdq, e os ajustes
as, bs e bs(nom) são usados para calcular a estimativa dos parâmetros do FAPP (abs ebbs)
usando Eqs. (3.37) e (3.38). Essas estimativas são usadas para determinar os ganhos do controladorpb2,pb1e bp0.
Figura 3.5: Diagrama de blocos do controldor de corrente V S−APPC proposto.
3.4.1
Projeto do Controlador de Corrente
Para o projeto do controlador de corrente V S−APPC é necessário escolher um
polinô-mio adequado A∗s(s)e determinar os coeficientes do controlador pb2,pb1epb0. Inicialmente
foi projetado um controlador PI convencional para a malha de corrente (figura 3.6).
Assumindo que G(s) = bs
s+as e T(s) =
kp
³
s+ki kp
´
s , são as funções de transferência da
planta de corrente e do controlador PI, respectivamente. Desta forma, considerando que
as= kkip, existe um cancelamento de pólos. E a função de tranferência em malha fechada
CAPÍTULO 3. ESQUEMA DE CONTROLE 25
Figura 3.6: Malha de controle das correntes de fase com controlador PI.
Y(s)
R(s) =
kpbs
s+kpbs
(3.45)
A largura de banda é definida na função de tranferência 3.45 pelo termo pelo termo
kpbs. Considerando que o controlador tenha uma banda passante de 1080Hz (18o
Harmô-nicos) tem-se:
kpbs=2·π·1080 (3.46)
Assim, o ganho proporcional é definido por:
kp=
2·π·1080
909 ≃7.5 (3.47)
O ganho kié calculado como:
ki=kpas=7.5×2000=14930 (3.48)
Utilizando uma relação obtida em [Jacobina, C.B.; De Carvalho, R.O., Jr.; Correa, M.B.R.; Lima, A.M.N.; Da Silva 2000], que determina os ganhos p2,p1 e p0do contro-lador proposto em função dos ganhos kpe kido controlador PI, econtra-se que:
p2=2·kp=15 (3.49)
p1=2·k1=29860 (3.50)
p0=2·kp·ω2s =2.1318×106 (3.51)
Assim, com base nas equações 3.49-3.51 e nas equações 3.21-3.23, os coeficientes do polinômio característico A∗s(s)são determinados por:
α∗
2=p2bs+as=15635 (3.52)
α∗
1=p2bs+as=2.7285×107 (3.53)
α∗
CAPÍTULO 3. ESQUEMA DE CONTROLE 26
Desta forma, o polinômio adequado A∗s(s)escolhido para a compensação requerida é:
A∗s(s) =s3+15635s2+2.7285×107s+2.2221×109 (3.55) De acordo com as as Eqs. (3.24)-(3.26), (3.37) e (3.38) as estimativas dos parâmetros do
V S−APPC podem ser obtidas por:
b p2=
15635−abs
b bs
(3.56)
b p1=
2.7285×107−ω2
s
b bs
(3.57)
b p0=
2.2221×109−asω2s
b bs
(3.58)
Para definir os coeficientes da lei de chaveamento é necessário considerar as limita-ções de estabilidade dadas por as>|as|e bs>
¯
¯bs−bs(nom)¯¯. Baseado em simulações e estudos teóricos, pode ser observado que a magnitude dessas leis de chaveamento (as e
bs) determina o quão rápido o controlador V S−APPC converge para as respectivas
refe-rências. Então, um bom critério de projeto é escolher parâmetros próximos dos valores médios dos coeficientes da planta ase bs. Baseado neste critério de projeto, uma das
pos-sibilidades seria a escolha dos seguintes valores as =2000, bs =1080 e bs(nom)=1000
são usados neste trabalho.
Esta não é a única solução e ajustes diferentes podem ser experimentados para dife-rentes aplicações.
3.5
Controlador de tensão do barramento cc
No esquema de controle proposto (fig. 3.4) a tensão do barramento CC é regulada atra-vés de um controlador PI convencional, com anti−windup. Neste esquema, a qualidade
da compensação dos componentes harmônicos de corrente depende do bom desempenho do controle desta tensão. A Fig. 3.7 mostra o diagrama de blocos da malha de con-trole da tensão do barramento CC. Onde o bloco Rv(s) refere-se ao PI, cuja função de
transferência é dada por:
Rv(s) =
kpvs+kiv
s (3.59)
Onde kpve kivsão os ganhos do controlador de tensão do barramento CC.
Como a tensão do barramento cc é uma associação em cascata com o controlador de corrente o atraso introduzido por este controle é desprezível e sua representação é omitida no diagrama. Para obter uma corrente de comando suave Iss∗′(s) na saída do regulador do barramento cc, um filtro passa-baixa de primeira ordem é introduzido na medição do barramento cc, representado pelo bloco Gv(s)com função de transferência dada por:
Gv(s) =
1 1+τvs
CAPÍTULO 3. ESQUEMA DE CONTROLE 27
Onde τv é o atraso introduzido pelo filtro passa-baixa na medição da tensão do
barra-mento cc. A parcela eIss(s) relacionada com a compensação harmônica (ver Fig. 3.4) é considerada como um distúrbio para ser compensado pelo controlador do barramento CC. Portanto, a função de transferência da malha de controle do barramento cc é dada por:
Go=
kpvs+kiv
Cs2(1+sτ
v)
(3.61)
E a função de transferência de malha fechada do barramento cc é expressa como:
vC′(s)
vC∗(s) =
kpvs+kiv
τvC(s3+τ1vs2+ kpv
τvCs+
kiv
τvC)
(3.62)
S R (s)R (s)vv S + + -vC * (s)
- 1/sC G (s)v
vC '
(s) vC(s)
iss´ ~ iss
iss
Figura 3.7: Diagrama de blocos da malha de controle de tensão do link-dc.
3.5.1
Critério de projeto para o controlador do barramento cc
O projeto dos ganhos do controlador do barramento cc são obtidos usando o Sym-metrical Optimum Tuning Optimization (SOT O) [Astrom & Hagglung 1995]. A função de transferência do controlador SOT O obtida usando um controlador com dois graus de liberdade, adequado para o controle do barramento cc Go, da Eq. (3.61) é:
GSO=
ω2
o(2s+ωo)
s2(s+2ω
o)
(3.63)
Ondeωoé a resposta em frequência de GSO. É também importante notar que o diagrama
de Bode desta função de transferência é simétrico ao redor da frequênciaω=ωo.
Para fazer a função de transferência Go(Eq. (3.61)) idêntica ao Symmetrical Optimum
GSO(Eq. (3.63)) é necessário que:
ωo=
1 2τv
(3.64) E que os ganhos do controlador sejam:
kpv=
C
2τv
(3.65)
kiv=
kpv
4τv
(3.66) Neste trabalho, o barramento CC é composto por um banco de capacitores de C=
2200µF e o filtro passa baixa da medição de tensão do barramento cc é implementado com uma frequência de ωv =100rad/s. Então, baseado no procedimento de projeto