ADRIANA CAVALCANTE AGOSTINHO
CONTROLE POR MODOS DESLIZANTES APLICADO A SISTEMA DE
POSICIONAMENTO DINÂMICO
ADRIANA CAVALCANTE AGOSTINHO
CONTROLE POR MODOS DESLIZANTES APLICADO A SISTEMA DE
POSICIONAMENTO DINÂMICO
Dissertação apresentada à Escola Politécnica da Universidade de São Paulo para obtenção do título de Mestre em Engenharia Elétrica.
Área de Concentração: Engenharia de Sistemas.
Orientador:
Prof. Dr. Eduardo Aoun Tannuri
FICHA CATALOGRÁFICA
Agostinho, Adriana Cavalcante
Controle por modos deslizantes aplicado a sistema de posi- cionamento dinâmico / A.C. Agostinho. -- São Paulo, 2009.
90 p.
Dissertação (Mestrado) - Escola Politécnica da Universidade de São Paulo. Departamento de Engenharia de Telecomunica- ções e Controle.
Dedico este trabalho ao meu noivo,
AGRADECIMENTOS
Agradeço ao meu orientador Prof. Dr. Eduardo Aoun Tannuri, que muito me incentivou e principalmente muito me ajudou na execução deste trabalho, sem o qual este não seria possível de ser realizado.
Ao Prof. Dr. Hélio Mitio Morishita, pelas preciosas contribuições no enriquecimento deste estudo.
Ao Prof. Dr. José Jaime da Cruz, com quem tive a oportunidade de aprimorar meus conhecimentos e a quem sou grata pelo constante apoio.
Ao meu noivo, Jefferson Olympio Pereira, cujo apoio foi de imensurável e de inestimável valor.
A todos os meus amigos e conhecidos que direta e indiretamente me ajudaram durante a execução deste trabalho.
Ao CNPq pela bolsa de estudo concedida.
RESUMO
Este trabalho apresenta a aplicação da teoria de controle robusto não linear por modos deslizantes a sistemas de posicionamento dinâmico para embarcações flutuantes, com validação experimental. O objetivo do sistema de controle projetado é manter a embarcação próxima a uma posição pré-ajustada (set-point) ou a uma trajetória preestabelecida (pathfollowing), por meio das forças geradas nos propulsores, mesmo estando o sistema na presença de distúrbios externos, ou seja, vento, ondas e correnteza. A princípio, realizaram-se simulações numéricas com o sistema projetado a fim de verificar o seu desempenho. O simulador utilizado foi implementado em ambiente Matlab/Simulink, considerando a dinâmica da embarcação e dos agentes ambientais. As simulações consistiram de manobras realizadas em condições nominais e na ausência de esforços ambientais, com embarcação cheia (plena) e vazia (lastro). Para validação do algoritmo implementado realizaram-se ensaios de manobra em condição de calmaria e na presença de vento, com a embarcação em plena carga e vazia. Os ensaios foram administrados no laboratório do Departamento de Engenharia Naval e Oceânica da USP (DENO). O algoritmo de controle por modos deslizantes demonstrou-se robusto a variações de condições ambientais (vento), mantendo o desempenho e estabilidade. Verificou-se que o ajuste dos parâmetros do controlador pode ser feito de forma intuitiva, utilizando-se fórmulas matemáticas. Além disso, a estrutura não linear do controlador e suas propriedades de robustez asseguram o desempenho e estabilidade para uma grande gama de condições ambientais e manobras realizadas com a embarcação.
ABSTRACT
This paper presents the application of the robust and nonlinear sliding mode control theory to the dynamic positioning systems for floating vessel, with experimental validation. The objective of the control system designed is to keep the vessel next a specific position (set-point) or follow a pre-defined trajectory (pathfollowing) through the action of propellers, in the presence of wind, waves and current external disturbances. In principle numerical simulations were carried out with the system designed to verify its performance. The simulator used was implemented in a Matlab / Simulink, considering the dynamics of the vessel and environmental agents. The simulations consisted of maneuvers carried out in nominal condition and in the absence of environmental efforts, with the vessel full and empty (ballasted). In order to validate the algorithm, small scale experiments were done, considering maneuvers in both calm and windy conditions, with the vessel at full or ballasted load. The tests were conducted at the laboratory of the Naval and Ocean Engineering Department (DENO) of the University of São Paulo. The sliding mode control was robust to variations in environmental conditions (wind), keeping the performance and stability. It was verified that the adjustment of controller parameters can be easily done, using mathematical equations. Moreover, the nonlinear structure of the controller and its robustness properties ensure the performance and stability for a large range of environmental conditions and maneuvers carried out with the vessel.
LISTA DE ILUSTRAÇÕES
Figura 1.1: Sistema de Posicionamento Dinâmico (adaptado de Wikipédia, 2009) ....1
Figura 1.2: Diagrama de Blocos de um Sistema de Posicionamento Dinâmico...2
Figura 1.3: Definição dos movimentos do corpo em seis graus de liberdade (DOF)...2
Figura 1.4: Evolução dos sistemas de exploração de petróleo ...3
Figura 1.5: Vista aérea do FPSO P-35...5
Figura 1.6: (a) FPSO Seillean e aliviador (b) Operação de alívio...5
Figura 1.7: Diagrama de blocos do controle PID aplicado em SPDs ...6
Figura 2.1: Sistemas de coordenadas...14
Figura 2.2: Ângulo de incidência de vento. ...16
Figura 2.3: Ângulos de incidência de correnteza e vento...16
Figura 2.4: Coeficientes adimensionais de vento...17
Figura 2.5: Espectro de Harris para C = 0.002 ...17
Figura 2.6: Definições para modelo estático de correnteza. ...18
Figura 2.7: Coeficientes estáticos adimensionais de correnteza...20
Figura 2.8: Espectro de JONSWAP para HS = 5.5m e Tp = 11.4s ...21
Figura 2.9: Diagrama de blocos dos movimentos horizontais de baixa freqüência...23
Figura 3.1: Superfície de escorregamento para n = 2 (adaptado de Slotine e Li, 1991) ...28
Figura 3.2: Fenômeno de chattering...32
Figura 3.3: Camada Limite ...33
Figura 4.1: Ponto de referência genérico ao longo do eixo longitudinal ...37
Figura 4.4: Condições ambientais consideradas nos ensaios...45 Figura 4.5: Diagrama de blocos completo...45 Figura 4.6: Manobras realizadas nas simulações. ...47 Figura 4.7:Simulação numérica– condição nominal e embarcação vazia – movimento de surge...48 Figura 4.8:Simulação numérica– condição nominal e embarcação vazia – movimento de sway...50 Figura 4.9:Simulação numérica– condição nominal e embarcação vazia – movimento de yaw...51 Figura 4.10: Tempo de alcance (treach) para os movimentos (a) surge, (b) sway e (c)
yaw – condição nominal e embarcação vazia ...52 Figura 4.11: Simulação numérica – = 0.15 e embarcação vazia – movimento de surge...54 Figura 4.12: Simulação numérica – = 0.15 e embarcação vazia – movimento de sway...55 Figura 4.13: Simulação numérica – = 0.15 e embarcação vazia – movimento de yaw...57 Figura 4.14: Tempo de alcance (treach) para os movimentos (a) surge, (b) sway e (c)
yaw – = 0.15 e embarcação vazia ...58 Figura 4.15:Simulação numérica–condição nominal e embarcação cheia-movimento de surge...60 Figura 4.16:Simulação numérica–condição nominal e embarcação cheia–movimento de sway...61 Figura 4.17:Simulação numérica–condição nominal e embarcação cheia–movimento de yaw...63 Figura 4.18:Tempo de alcance (treach) para os movimentos (a) surge, (b) sway e (c)
Figura 5.3: Modelo de comunicação entre o protótipo e o computador...67
Figura 5.4: Condição de vento. ...68
Figura 5.5: Sinal medido e filtrado – posição X. ...68
Figura 5.6: Ensaio e simulação numérica para os movimentos de (a) surge, (b) sway e (c) yaw – condição de calmaria e navio vazio ...70
Figura 5.7: Plano de fase do ensaio realizado para os movimentos de (a) surge, (b) surge (ampliado), (c) sway, (d) sway (ampliado), (e) yaw e (f) yaw (ampliado) – condição de calmaria e embarcação vazia...72
Figura 5.8: Tempo de alcance (treach) do sistema – condição de calmaria e navio vazio ...73
Figura 5.9: Ensaio em condição cheia e vazia ...74
Figura 5.10: Ensaio com incidência de vento – etapas do ensaio...75
Figura 5.11: Ensaio com incidência de vento...76
Figura 5.12: Plano de fase do sistema em movimento de (a) sway e (b) yaw - ensaio com incidência de vento. ...77
LISTA DE TABELAS
Tabela 4.1: Tempo de alcance - condição nominal e embarcação vazia. ...51
Tabela 4.2: Tempo de alcance - = 0.15 e embarcação vazia. ...57
Tabela 4.3: Tempo de alcance condição nominal e embarcação cheia. ...63
Tabela 4.4: Sobre-sinal e tempo de estabilização para simulação...64
Tabela 5.1: Propriedades do modelo da embarcação...66
Tabela 5.2: Sobre-sinal e tempo de estabilização para condição de calmaria e embarcação vazia ...70
Tabela 5.3: Tempo de alcance condição calmaria e nominal e embarcação cheia...72
Tabela 5.4: Tempo de alcance para o ensaio com incidência de vento.. ...77
Tabela A.1: Coeficientes de correnteza – Condição Carregada...89
Tabela A.2: Coeficientes de correnteza – Condição Lastro ...89
Tabela A.3: Coeficientes de vento – Condição Carregada...90
LISTA DE ABREVIATURAS E SIGLAS
DGPS Differential Global Positioning System
DOF Degree of Freedom
DP Posicionamento Dinâmico
FK Filtro de Kalman
EFK Filtro de Kalman Estendido
FPSO Floating Production Storage and Offloading System
HF Movimentos de Alta Freqüência
HL Movimentos de Baixa Freqüência
GPS Global Positioning System
ITTC International Towing Tank Conference JONSWAP Joint North Sea Wave Project
LQ Linear Quadrático
LQG Linear Quadrática Gaussiana
OCIMF Oil Companies International Maritime Forum PID Proporcional Integral Derivativo
SMC Controle por Modos Deslizantes SPD Sistema de Posicionamento Dinâmico
LISTA DE SÍMBOLOS
Nas relações abaixo são utilizadas notações em negrito para representar parâmetros ou funções vetoriais ou matriciais e as letras em itálicas i e j para representar índices.
Alfabeto Romano
ai Coeficientes de massa e massa adicionais (i=1,2,...,5)
Afrontal Área projetada frontal da parte emersa
Alateral Área projetada lateral da parte emersa
b(.) , bij(.) Funções que multiplicam a entrada u (uj), presentes na dinâmica dos sistemas utilizados na teoria de Controle por Modos Deslizantes.
B Matriz com os termos bij
C Coeficiente de arraste superficial
C Matriz definida em (4.5)
Cij Coeficiente que representa a influência da força ou momento j sobre o movimento i
C1C(.),C2C(.),C6C(.) Coeficientes estáticos de correnteza
CVx(.), CVy(.), CVn(.) Coeficientes adimensionais de esforços de vento
d(.) , di(.) Distúrbio
D(.) , Di(.) Limitante superior do distúrbio d e dj
Dj(.) Coeficiente de deriva ( j=1,2,6)
f(.) , fi(.) , f(.) Função, ou vetor de funções, que define a dinâmica dos sistemas (parcela independente da entrada de controle)
fX,din(.) , fY,din(.) , fψ,din(.) Funções com componentes de forças inerciais relativas ao movimento nas direções OX, OY e à rotação em torno de
OZ
F(.), Fi(.) Limitante superior do erro de modelagem em f(.) e fi(.)
F1C, F2C, F6C Forças e momento devidos à correnteza
F1DL, F2DL, F6DL Forças e momento de deriva lenta
F1DM, F2DM, F6DM Forças e momento de deriva média
F1E, F2E, F6E Forças e momento ambientais
F1T, F2T, F6T Forças e momento devidos aos propulsores
F1V, F2V, F6V Forças e momento devidos ao vento Z
Y X F N
F , , Forças e momento externos aplicados no centro de massa,
projetados na direção OX, OY e OZ
g Aceleração da gravidade
Honda(s) Função de transferência do filtro de onda
Hs Altura significativa da onda
i, j Versores nas direções ox e oy respectivamente
I, J Versores nas direções OX e OY respectivamente
Z
I Momento de inércia baricêntrico em relação ao eixo OZ J( ) Matriz de transformada de coordenadas
k(.) , ki(.) Ganho do termo descontínuo do controlador por modos deslizantes (i =1,2,... ou i= X,Y,ψ )
L Comprimento da embarcação
M Massa da embarcação
M11, M22, M66, M26 Massas adicionais em baixa freqüência (relativas ao ponto o)
n Ordem do sistema dinâmico
o Ponto intersecção entre a linha de centro e a secção mestra
oxyz Referencial solidário à embarcação
s(.), si(.) Variáveis que definem a superfície de escorregamento S(t) (i =1,2,... ou i= X,Y,ψ )
S(.) Superfície de escorregamento
S(ω) Densidade espectral de amplitude de onda
SjDL(ω) Densidade espectral das forças e momento de deriva lenta ( j=1,2,6)
SV(ω) Densidade espectral da velocidade do vento (rajadas)
t Tempo
talcance Tempo para a trajetória atingir a superfície de escorregamento
) (t S
T Calado da embarcação
A
T Tempo de atraso do sistema
u Vetor com entradas de controle
u, uj Entradas de controle
u(.), v(.) Componentes da velocidade do ponto o em relação ao meio
fluido nos eixos ox e oy
û(.) Termo de linearização por realimentação
U(.) Velocidade absoluta do ponto o (em relação ao referencial
fixo)
Ur(.) Velocidade do ponto o em relação ao referencial ao meio fluido
r
v Freqüência do primeiro modo ressonante não modelado do
sistema S
v Taxa de amostragem do sistema
V(.) Função candidata de Lyapunov VV(.) Velocidade do vento
VC Velocidade da correnteza
x(.) Vetor de estados
) ( ), ( ), ( ),
( 2 1 2
1 . x . x . x .
x Componentes da velocidade e aceleração do ponto o nos
eixos ox e oy
x6(.) Ângulo de aproamento
xd(.) , xd(.) , xdi(.) Valores desejados (set-points) para vetor de estados x, estado
x e estado xi respectivamente
xG Posição longitudinal do baricentro em relação ao ponto o
xr Vetor com termos xdi xi
~
λ
−
X(.), Y(.) Posição do ponto o em relação ao referencial OXYZ
Alfabeto Grego
α Direção de incidência da correnteza em relação à ox
αο Fator multiplicativo do espectro de potência da onda θ Direção de incidência da correnteza em relação à OX
βO Direção de incidência de onda em relação à ox
βV Direção de incidência do vento em relação à ox ϕ Direção de incidência do vento em relação à OX ∆F1C(.),∆F2C(.),
∆F6C(.)
Parcelas das forças e momento de correnteza devidas à rotação do casco
∆ω Diferença entre duas freqüências consecutivas na definição do
espectro
Φ , Φi Largura da camada limite (i=1,2,... ou i= X,Y,ψ ψ )
γ Fator de forma do espectro de JONSWAP
η , ηi Parâmetro do controle por modos deslizantes (i=1,2,... ou
ψ , ,Y X
λ , λi Parâmetro do controle por modos deslizantes, relacionado à largura de banda em malha fechada (i=1,2,... ou i= X,Y,ψ ) µ Diferença entre freqüências, utilizada no cálculo dos esforços de
deriva lenta
ρ Densidade da água
ρa Densidade do ar
σ Fator do espectro de JONSWAP
ω Freqüência
ω1, ω2, ω3 Freqüência dos três picos de atenuação do filtro notch em
cascata
ωp Freqüência de pico do espectro de onda
ψ(t) Ângulo de aproamento
Simbologia Especial
T (Sobrescrito) Transposição
^ (Sobre a variável) Valor estimado
~ (Sobre a variável) Erro - diferença entre valor real e valor
desejado
_ (Sobre a variável) Indica relação ao centro de massa
. (Sobre a variável) Derivada em relação ao tempo
.. (Sobre a variável) Derivada de segunda ordem em relação ao
tempo
GLOSSÁRIO
Movimento de surge: Movimento de translação longitudinal (avanço), indicado pelo índice 1
Movimento de sway: Movimento de translação lateral (deriva), indicado pelo índice 2
Movimento de heave: Movimento de translação vertical (arfagem), indicado pelo índice 3
Movimento de pitch: Movimento de rotação (no plano vertical) em torno do eixo transversal (caturro), indicado pelo índice 4
Movimento de roll: Movimento de rotação (no plano vertical) em torno do eixo longitudinal (balanço ou jogo), indicado pelo índice 5
SUMÁRIO
1 INTRODUÇÃO ...1
1.1 Apresentação e Definição do Problema...1
1.2 Resumo Bibliográfico ...6
1.3 Objetivo...10
1.4 Justificativa para a Abordagem Não Linear ...10
1.5 Organização do Trabalho ...12
2 MODELO MATEMÁTICO DO SISTEMA...13
2.1 Equações do movimento ...13
2.2 Forças Ambientais ...15
2.2.1 Força de Vento...15
2.2.2 Forças de Correnteza...18
2.2.3 Forças de Ondas...20
2.3 Diagrama Completo do Modelo Matemático do Sistema...22
3 CONTROLE NÃO LINEAR...24
3.1 Linearização por realimentação...25
3.2 Controle não linear por modos deslizantes...26
3.2.1 Superfície de Escorregamento...27
3.2.2 Lei de Controle...30
3.2.3 Controle integral...32
3.2.4 Camada limite ...32
3.2.5 Análise da Estabilidade ...34
4 APLICAÇÃO DA TÉCNICA DE CONTROLE POR MODOS DESLIZANTES AO
SISTEMA DE POSICIONAMENTO DINÂMICO ...37
4.1 Adaptação do modelo ...37
4.2 Ajuste dos parâmetros ...42
4.3 Filtro de Ondas ...44
4.4 Simulador...45
4.5 Simulações utilizando controlador por modos deslizantes...46
5 VALIDAÇÃO EXPERIMENTAL DA TÉCNICA DE CONTROLE POR MODOS DESLIZANTES AO SISTEMA DE POSICIONAMENTO DINÂMICO ...65
5.1 Descrição do aparato experimental ...65
5.2 Validação ...68
5.2.1 Manobras ...68
5.2.2 Análise Preliminar de Robustez ...73
5.2.3 Análise de Condições de Vento ...75
6 CONCLUSÕES E COMENTÁRIOS FINAIS...79
7 REFERÊNCIAS...80
ANEXO 1 – SUBSISTEMAS DOS SPDS...83
ANEXO 2 – DEDUÇÃO DAS EQUAÇÕES DO MOVIMENTO DA EMBARCAÇÃO EM MEIO FLUIDO ...86
1
1 INTRODUÇÃO
1.1 Apresentação e Definição do Problema
De acordo com Bray (1998) e Fossen (1994), define-se Posicionamento Dinâmico (DP) como um sistema que controla automaticamente a posição e o aproamento de uma embarcação por meio de propulsão ativa. A característica fundamental dos sistemas de posicionamento dinâmico (SPD) é a integração de um grande número de subsistemas operando conjuntamente. Tais subsistemas são representados por sensores (GPS, sonar, anemômetros, giroscópios, etc...), atuadores (propulsores e leme) e um processador central responsável pela execução do algoritmo de controle e pela interface com o operador (Figura 1.1). Uma breve descrição de cada um desses subsistemas é apresentada no Anexo 1.
Figura 1.1: Sistema de Posicionamento Dinâmico (adaptado de Wikipédia, 2009)
2 forças são distribuídas pelos propulsores (geralmente variam de três a nove propulsores em média) por meio de um algoritmo de alocação de empuxo. A dinâmica dos propulsores (atuadores) também deve ser levada em consideração, pois retarda a ação de controle. O vento, medido pelos anemômetros, são em parte compensados por uma malha de pré-alimentação (feedforward).
Controlador de Empuxo Alocação Propulsores
Filtro de Ondas
Filtro de Vento
Força de controle
desejada
Força desejada
nos propulsores
Força real nos propulsores Velocidade e
direção de vento
Dinâmica da embarcação
Movimentos
filtrados Movimentos medidos
y, x,
Posição Aproamento Vento Correnteza Ondas
Forças Ambientas
Sistema Físico Posição e
Aproamento Set-points ( )
Computador
Figura 1.2: Diagrama de Blocos de um Sistema de Posicionamento Dinâmico
Embora as forças ambientais induzam movimentos nos seis graus de liberdade (DOF), conforme ilustra a Figura 1.3, o SPD atua apenas sobre os movimentos do plano horizontal (surge, sway e yaw).
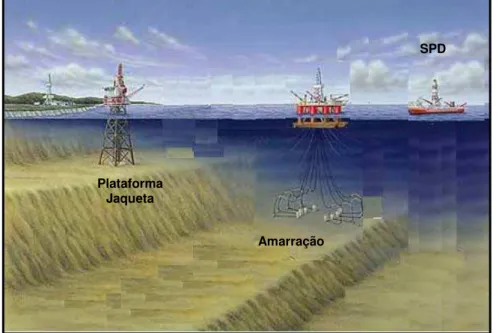
3 A motivação inicial para o surgimento dos SPDs foi relacionada à exploração de petróleo em águas profundas. A princípio plataformas do tipo jaquetas foram empregadas na exploração de petróleo, com sucesso para profundidades inferiores à 500m. Posteriormente, surgiram os sistemas de amarração com viabilidade técnica e econômica até 1000m de profundidade, evoluindo para os sistemas DP com capacidade para atingir profundidades superiores à 1000m.
Figura 1.4: Evolução dos sistemas de exploração de petróleo
A primeira geração de veículos posicionados dinamicamente era constituída de embarcações adaptadas, onde a ação dos propulsores era comandada diretamente pela tripulação. O primeiro navio a se manter posicionado dinamicamente foi o “Cuss-I”, em 1961, nos Estados Unidos. O controle da posição e aproamento eram feito manualmente, ou seja, o operador mantinha a posição da embarcação através de informações enviadas por um sistema de radar e de um sonar. Porém, o sistema de controle manual trouxe dúvidas quanto à confiabilidade da operação, pois exigia excessiva concentração por parte do operador, que, por sua vez, não conseguia manter uma mesma ação de controle por muito tempo.
No mesmo ano, desenvolveu-se o primeiro navio equipado com controle automático de posição e aproamento, o “Eureka”, lançado por um representante da Shell Oil Company. O sistema era composto por um controlador analógico que recebia as informações de um sensor de posição do tipo fio tensionado.
Ao longo da década de 60, outros navios foram convertidos para atuarem com SPD, como o norte americano “Cardrill” e o francês “Terébel”. Comparados aos
Plataforma Jaqueta
Amarração
4 modernos SPDs, esses navios eram extremamente simples, com controladores analógicos, sem redundância e desprovidos de um sistema de compensação ativa dos esforços ambientais.
Após a década de 70, o DP tornou-se uma técnica difundida em virtude da expansão da indústria de prospecção e exploração de petróleo em alto-mar. Atualmente, o sistema de posicionamento dinâmico é um requisito de projeto necessário para execução de diversas operações marítimas além das atividades ligadas ao ramo petrolífero. Pode-se mencionar entre outras atividades, a prospecção da crosta terrestre submarina na busca de minerais e petróleo, o combate a incêndios de estruturas fixas ou flutuantes, pesquisa oceanográfica geral, navios militares de suporte, navios de carga e cruzeiro, plataformas de lançamento de foguetes em alto-mar, lançamento e manutenção de dutos submarinos (“pipelaying”), traqueamento de embarcações submersíveis tipo ROV, suporte nas operações de mergulho, operações de reboque e transferência de carga.
De acordo com Donha (1989), a complexidade dessas atividades impõe requisitos severos de manobrabilidade e posicionamento ao veículo utilizado, cujo comportamento depende do SPD utilizado. Assim, os SPDs têm sido projetados para satisfazer requisitos, tais como: posicionar o veículo próximo a uma estrutura móvel; posicionar o veículo em locais obstruídos por tubulações, cabos e saídas de poços (well heads); movimentar o veículo de um local para outro sem atrasos; minimizar a instalação de equipamentos a bordo, reduzindo o deslocamento e o consumo de energia; capacidade de ajuste de aproamento minimizando os efeitos das forças ambientais; manter-se em atividade em condições ambientais muito severas, com alta confiabilidade e precisão.
5
Figura 1.5: Vista aérea do FPSO P-35
As unidades FPSOs são navios petroleiros convertidos em plataformas e mantidos amarrados em alto-mar. Os FPSOs são responsáveis pela extração, armazenamento e o processamento do óleo em seus tanques. A operação de descarregamento destas unidades é realizada por navios aliviadores (shuttle), que periodicamente se aproximam do FPSO e, durante uma operação delicada, se conectam aos mesmos através de um mangote e transferem o óleo para seus tanques (Figura 1.6). Durante esta operação, quando não assistida por SPD, navios rebocadores garantem uma distância de segurança entre os dois petroleiros, evitando também que se afastem em demasia, o que poderia desconectar os mangotes. Quando dotados de SPDs, os navios aliviadores realizam a aproximação e manutenção da posição de forma automática, com menor interferência humana e menor risco de colisão. Questões de confiabilidade e desempenho são extremamente importantes, pois a operação de alívio é delicada. Qualquer problema pode levar a colisões ou vazamento de óleo no mar.
(a) (b)
6
1.2 Resumo Bibliográfico
Os primeiros sistemas de posicionamento dinâmico surgiram no início da década de 60 como uma alternativa ao sistema de amarração. Para cada grau de liberdade do sistema (avanço, deriva e aproamento) empregava-se um controlador PID (proporcional-integral-derivativo) em cascata com um filtro passa-baixa e/ ou filtro notch. A Figura 1.7 ilustra o diagrama de blocos do controle PID aplicado ao SPD (Bray, 1998).
Navio Navio Sistema de Sistema de Referência de Referência de Posição Posição x x y y Giroscópio Giroscópio ψ ψ Filtragem Filtragem e e Compensação Compensação PID x PID x PID y PID y PID
PID ψψ
Alocação
Alocação
de empuxo
de empuxo
F
Fxx
F
Fyy
F
Fψψ
Compensador de Compensador de Vento Vento + + + + + + Propulsores Propulsores Agentes Agentes Ambientais Ambientais Anemômetro Anemômetro R ef er ên ci as R ef er ên ci
as ++__
+ + _ _ + + _ _ VRU
VRU MovMov. Verticais. Verticais
Figura 1.7: Diagrama de blocos do controle PID aplicado em SPDs
No projeto dos controladores PID assumiam-se duas hipóteses: os movimentos horizontais eram desacoplados, ou seja, a não existência de interação entre a dinâmica e hidrodinâmica dos mesmos e admitia-se também a linearidade do sistema, à medida que o PID é um controlador linear.
7 A contribuição mais significativa para o desenvolvimento dos SPDs ocorreu em meados da década de 70 com a aplicação do filtro de Kalman (FK) e do controlador Linear Quadrática Gaussiana (LQG). O FK incorpora em sua modelagem o modelo do sistema (chamado de modelo interno), permitindo a separação entre as componentes de alta e baixa freqüência, permitindo uma estimação ótima das componentes de movimento isoladamente, o que é desejável para o controle, já que este deve atuar apenas em função dos movimentos de baixa freqüência. A idéia de separar o modelo interno do FK em duas parcelas, alta freqüência e baixa freqüência, foi originalmente proposta pela primeira vez por Balchen; Jenssen e Saelid (1976). Várias razões explicam a ampla aplicação do FK em sistema DP, entre eles à redução do atraso de fase introduzido pelo processo de filtragem (comparado ao convencional passa-baixa) permitindo que o sistema melhore o seu desempenho. Adicionalmente, o FK permite a utilização de vários sensores redundantes, realizando a estimação ótima da posição e aproamento da embarcação com base nas informações dos mesmos. Esta característica é importante em SPDs, uma vez que a confiabilidade e segurança são questões fundamentais para esses sistemas. Além disso, a presença do modelo interno permite que o Filtro de Kalman estime a posição do navio mesmo na ausência total de novas medidas durante alguns minutos (dead-reckoning), o que aumenta a confiabilidade do sistema. Finalmente, com a utilização do FK é possível estimar as forças ambientais que atuam sobre a embarcação, o que é importante para os operadores e pode ser utilizado no controlado ao invés do termo integral (Bray, 1998). Porém, sua implementação demanda a linearização das equações do movimento em torno de ângulos de guinada pré-definidos.
Para considerar as não linearidades geométricas do sistema, o FK foi adaptado e denominado Filtro de Kalman Estendido (EKF). Neste caso o modelo linear utilizado no filtro é constantemente atualizado em função da mudança do ângulo de guinada do navio. Este trabalho foi posteriormente aprimorado por Balchen; Jenssen e Saelid (1980), Grimble; Patton e Wise (1980), Saelid; Jenssen e Balchen (1983), Fung e Grimble (1983), Di Masi; Finesso e Picci (1986), Donha (1989) e Donha (2000).
8 controladores convencionais (PD + FKE) apresentam problemas de desempenho e dificuldade de ajuste dos ganhos devido às não linearidades não consideradas durante o projeto e às variações das condições ambientais. Outro problema apresentado refere-se à compensação dos esforços ambientais. Os esforços de vento podem ser estimados por meio de instrumentos de medição disponível no mercado. Porém, os esforços de ondas e correnteza não podem ser estimados devido à dificuldade de medição. Na abordagem de controle convencional, consideram-se estas forças como perturbações quase estáticas na malha de controle, e o projeto é feito de forma a compensar tais efeitos através de uma ação integral incluída no controlador. A conseqüência direta desta abordagem é o fato do controlador apresentar bom desempenho apenas nas condições ambientais estimadas.
Como em todo sistema real, o controlador deve ser robusto a erros de modelagem, garantindo o desempenho e estabilidade para modelos próximos ao nominal, utilizado no projeto. Assim, questões de robustez a erros de modelagem passaram a ser consideradas em SPD em meados da década de 90, utilizando-se outras abordagens de controle linear. Dentro desse contexto destaca-se a metodologia de controle H∞ aplicada por vários autores em projetos de SPD, tais
como: Katebi; Grimble e Zhang (1997), Nakamura e Kajiwara (1997), Tannuri e Donha (2000) e Donha e Tannuri (2001). O controlador H∞ apresentou propriedades
de robustez satisfatórias, com um bom desempenho na presença de grandes variações das condições ambientais, erros de modelagem e incerteza nos parâmetros. No entanto, a metodologia de controle H∞ é linear e, portanto, tem por
base um modelo linear do sistema.
9 A técnica de controle por modos deslizantes (SMC) surgiu no final da década de 1970, na antiga União Soviética, sendo desenvolvida por Utkin (1978) e posteriormente modificada e adaptada por Slotine (1984). Essa técnica considera em sua estrutura as incertezas do modelo e a lei de controle é determinada de forma que as trajetórias do sistema “deslizassem” sobre uma região desejada no espaço de estado, denominada superfície de deslizamento, ali permanecendo indefinidamente. Essa abordagem não-linear elimina os problemas de linearização encontrados nos controles lineares, assim como torna bastante intuitivo e simples o processo de ajuste dos parâmetros da malha de realimentação. Entretanto, da forma como fora proposta por Utkin, esta metodologia apresentou alguns problemas relacionados aos elevados ganhos de controle e principalmente a existência de oscilações de alta freqüência (chaveamento) na ação de controle, dificultando sua aplicação prática. Slotine e Sastry (1983) desenvolveram adaptações nessa metodologia para viabilizar sua implementação prática, através da “suavização” do termo chaveado de controle. Tannuri (2002) aplicou essa metodologia em sistemas de posicionamento de embarcações na Bacia de Campos. O controlador por modos deslizantes demonstrou-se robusto e eliminou (ou minimizou) os problemas relacionados ao ajuste dos parâmetros do modelo contido no controlador.
10
1.3 Objetivo
Embora a técnica de Posicionamento Dinâmico esteja sendo utilizada com êxito ao longo desses últimos anos, alguns aspectos de projeto ainda são temas de pesquisa e desenvolvimento, motivados por problemas operacionais, podendo-se destacar: desempenho, robustez e praticidade dos algoritmos de controle; realização de ensaios experimentais e metodologias de projetos e testes; análise de risco, confiabilidade e redundância de equipamentos e algoritmos; desenvolvimento e melhorias de sistemas de medição de agentes ambientais e estratégias de controle em operações de alívio de plataformas.
Entre os itens mencionados acima, os dois primeiro serão abordados no presente trabalho através do projeto e implementação de um controlador para SPD baseado na teoria de controle não linear por modos deslizantes (sliding mode control).
O desempenho do controlador projetado será avaliado através de simulação digital, na qual as condições ambientais e a dinâmica da embarcação são implementadas no computador e através de ensaios com modelo reduzido, reproduzindo as mesmas condições ambientais consideradas durante simulação.
Utilizou-se o programa Matlab/Simulink versão 6.5. para desenvolver um simulador que fosse capaz de simular com razoável grau de precisão os movimentos da embarcação flutuante em diferentes condições, bem como a ação das forças ambientais sobre o sistema. Os resultados obtidos nas simulações serão então comparados com os resultados provenientes dos ensaios realizados no tanque de provas do laboratório do Departamento de Engenharia Naval e Oceânica.
1.4 Justificativa para a Abordagem Não Linear
11 apresentavam problemas de desempenho e dificuldade de ajuste dos ganhos devido às não-linearidades não consideradas durante o projeto e às variações das condições ambientais. Outro problema apresentado é a dificuldade em estimar os esforços de correnteza e ondas, devido à ausência de instrumentos de medição no mercado. No controle convencional, tais forças são substituídas por perturbações quase estáticas e o projeto é feito de forma a compensar tais efeitos por meio de uma ação integral incluída no controlador. Porém, o controlador apresentar bom desempenho apenas nas condições ambientais estimadas.
Deste modo, avaliou-se a necessidade de se projetar um controlador mais sofisticado que consiga melhorar o desempenho dinâmico do sistema. Na literatura são citadas algumas formas de se fazer esse tipo de controle. Tannuri (2002), por exemplo, utiliza a técnica de SMC aplicado a SPD. Porém, no referido trabalho, somente foi possíveis realizara simulações com o sistema projetado em ambiente Matlab/Simulink. Assim, o presente trabalho, visou aprimorar o projeto desenvolvido em Tannuri (2002) por meio de ensaios realizados no laboratório do Departamento de Engenharia Naval e Oceânica.
Apesar de existirem várias técnicas de controle não lineares, optou-se em utilizar a técnica do controle por modos deslizantes devido à facilidade de sua implementação e ao fato de lidar com incertezas nos parâmetros do modelo matemático e também em sistemas que possuem incertezas na estrutura do próprio modelo, como é o caso do modelo do atuador em estudo. Esse tipo de controle garante os objetivos desejados como robustez, acompanhamento do sinal de referência, estabilidade, baixo e tempo de acomodação e rejeição de distúrbios externos. Além disso, há somente três parâmetros de ajuste para cada movimento, sendo facilmente sintonizados por equações simples. A abordagem não-linear do controlador assegura o desempenho e estabilidade para todas as posições e ângulos de aproamento e o desempenho do controlador não é afetado quando o sistema é submetido a uma ampla gama de condições ambientais. A estabilidade do controlador pode ser provada utilizando-se Lyapunov e como o controlador contém informações sobre o modelo da embarcação, a massa estimada é utilizada como um parâmetro de projeto, não degradando o desempenho do sistema para diferentes condições de carga.
12 veículos oceânicos é intrinsecamente não linear; as incertezas de modelagem podem ser facilmente absorvidas no projeto do controlador; os algoritmos de controle são simples e de baixo custo, facilitando sua implementação em computadores de bordo e o sistema resultante apresenta maior robustez e melhor desempenho.
1.5 Organização do Trabalho
A estrutura do texto foi elaborada de forma a abranger as principais fases do projeto, incluindo revisões bibliográficas e a abordagem dos modelos matemáticos empregados.
No capítulo 2 são apresentados todos os modelos utilizados no projeto do controlador. Apresentam-se, inicialmente, as equações de movimento com três graus de liberdade horizontais de um corpo flutuante em um meio fluido. Em seguida, são descritos os modelos utilizados para representar os esforços devidos aos agentes ambientais (onda, vento e correnteza) atuantes sobre a embarcação.
No capítulo 3 é realizada uma abordagem teórica do controle robusto não-linear por modos deslizantes. No capítulo 4, o modelo matemático do sistema exposto no capítulo 2 é, então, adaptado para técnica de controle proposta no capítulo 3. Algumas simulações utilizando o controlador por modos deslizantes são apresentadas a fim de confirmar o bom desempenho do sistema.
No capítulo 5 é realizada a descrição do aparato experimental utilizado para avaliação da dinâmica do sistema, bem como os experimentos conduzidos no tanque de provas do Departamento de Engenharia Naval e Oceânica para validação do algoritmo desenvolvido.
13
2 MODELO MATEMÁTICO DO SISTEMA
Neste capítulo apresentam-se os modelos matemáticos que descrevem os movimentos horizontais de baixa freqüência de uma embarcação flutuante sujeita a ação dos agentes ambientais (onda, vento e correnteza).
Na seção 2.1 apresentam-se, as equações de movimento segundo os 3 graus de liberdade horizontais de um corpo flutuante em um meio fluido.
Na seção 2.2 apresentam-se os modelos dos esforços ambientais. Uma breve descrição matemática das forças e momento devidos à ação do vento é apresentada na seção 2.2.1. Os efeitos das rajadas provocados pelas variações na velocidade de vento foram calculados utilizando-se o espectro de Harris (Fossen, 1994). Na seção 2.2.2 apresenta-se o modelo dos esforços devidos à correnteza. Em 2.2.3 são expostos os modelos que descrevem os esforços devidos às ondas. Inicialmente, descreve-se o espectro que representa a aleatoriedade do mar, sendo que no presente caso utilizou-se a formulação denominada de JONSWAP. Em seguida, descrevem-se as forças de segunda ordem, que representam as componentes de baixa freqüência atuantes sobre o movimento da embarcação.
Para finalizar, na seção 2.3 apresenta-se um diagrama de blocos dos modelos descritos, mostrando a inter-relação entre eles e como foram implementados no simulador.
2.1 Equações do movimento
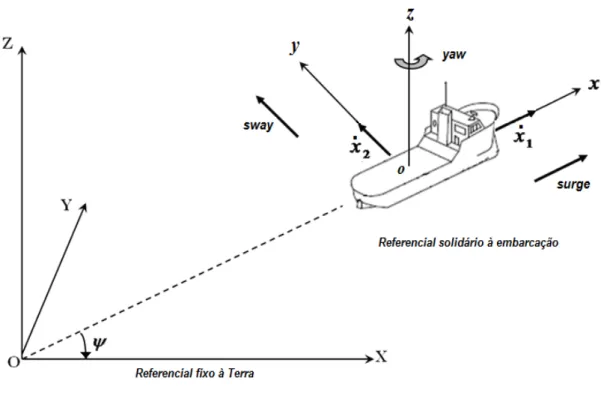
A modelagem matemática dos movimentos horizontais de uma embarcação flutuante envolve a escolha de dois sistemas de referenciais como ilustra a Figura 2.1. O primeiro sistema de coordenadas, OXYZ, é fixo à Terra e é considerado como
inercial. A trajetória do movimento da embarcação, ao longo do tempo, é descrita em relação a esse sistema.
14 do movimento do sistema são descritas nesse sistema de coordenadas. Admite-se que os eixos OZ e oz são paralelos, verticais e orientados para cima.
Os movimentos lineares ao longo dos eixos
ox
eoy
são chamados de surge e sway, respectivamente. O movimento de rotação ao longo do eixo oz é chamadode yaw.
Figura 2.1: Sistemas de coordenadas
Assume-se o navio tem simetria em relação ao eixo
ox
e que o centro de gravidade está localizado em (xG,0,0) em relação ao sistemaoxyz
, bem como ahipótese de que os movimentos horizontais de baixa freqüência sejam desacoplados dos movimentos verticais da embarcação e dos movimentos horizontais de alta freqüência.
Assim, de acordo com Fossen (1994), define-se o modelo matemático dos movimentos horizontais de baixa freqüência de uma embarcação flutuante por equações diferenciais de segunda ordem dadas por:
(
)
(
)
( ) 1 1 ;2 6 26 6
2 22 1
11 x M M x x MxG M x FE FT
M
M + − + − + = +
(
M +M22)
x2 +(MxG +M26 )x6 +(
M + M11)
x1x6 = F2E + F2T; (2.1)15 nas quais M é a massa da embarcação, Mij são os elementos da matriz de massas adicionais, Izé o momento de inércia em relação ao eixo vertical,F1E, F2E e F6Esão as esforços de surge, sway e yaw, respectivamente, causadas pelos agentes ambientais, e F1T, F2T e F6T são as forças e momento gerados pelo sistema de propulsão. As variáveis x1, x2 e x6 são as velocidades de surge, sway e yaw do ponto central da meia-nau (origem do sistema de coordenadas
oxyz
). A dedução destas equações é apresentada no Anexo-2.2.2 Forças Ambientais
Nesta seção serão descritos os modelos das forças e momentos devidos às forças ambientais que atuam sobre uma embarcação no meio fluido.
2.2.1 Força de Vento
As componentes da força vento na direção longitudinal (surge) e lateral (sway) e o momento de yaw são ocasionados pela incidência do vento sobre a parte emersa da embarcação e são modelados através das seguintes equações:
2
1 ( )
2 1
V Frontal V
Vx a
V C A V
F = ρ β
2
2 ( )
2 1
V Lateral V
Vy a
V C A V
F = ρ β (2.2)
2
6 ( )
2 1
V Lateral V
Vn a
V C LA V
F = ρ β
onde F1V e F2V são as forças nas direções longitudinais e transversais respectivamente, F6V é o momento de yaw; ρa é a densidade do ar; AFrontal e ALateral são as áreas longitudinal e transversal, respectivamente, da parte emersa da embarcação; CVx, CVy e CVn são coeficientes adimensionais de vento; VV é a velocidade do vento; e βV é o ângulo relativo à embarcação dado por (2.3) e ilustrado na Figura 2.2.
ψ ϕ
16
Figura 2.2: Ângulo de incidência de vento.
A figura abaixo ilustra as convenções adotadas para os ângulos de incidência dos agentes ambientais em relação ao navio.
Figura 2.3: Ângulos de incidência de correnteza e vento.
Os coeficientes adimensionais de vento, CVx, CVy e CVn, são obtidos por meio de ensaios em túnel de vento ou em tanques de prova com o modelo emborcado. Há algumas referências que podem ser consultadas para que uma primeira estimativa seja obtida, por exemplo, Isherwood (1972) e OCIMF (1997). No presente trabalho adotam-se os coeficientes dados na OCIMF (1997). A Figura 2.4 ilustra tais curvas para cada movimento horizontal.
Coeficientes de Vento Frontais
-2 -1,5 -1 -0,5 0 0,5 1 1,5 2 2,5
0 50 100 150 200 250 300 350
Incidência (°)
C
vx
Carregada Lastro
Coeficientes de Vento Transversais
-1,5 -1 -0,5 0 0,5 1 1,5
0 50 100 150 200 250 300 350
Incidência (°)
C
vy
Carregada Lastro
(a) Coeficientes de Vento Frontais (b) Coeficientes de Vento Transversais
17
Coeficientes de Vento Frontais
-2 -1,5 -1 -0,5 0 0,5 1 1,5 2 2,5
0 50 100 150 200 250 300 350
Incidência (°)
C
vx
Carregada Lastro
(c) Momento de Vento
Figura 2.4: Coeficientes adimensionais de vento.
A velocidade de vento VV não é constante ao longo do tempo. A mesma
possui uma parcela que varia lentamente com o tempo e é responsável pelos esforços quase-estáticos sobre o sistema, e uma parcela oscilatória de alta freqüência, conhecida como rajada, que é descrita por meio de espectros de vento.
Tais espectros de vento podem ser definidos utilizando-se o espectro de Harris ou de Ochi-Shin (Fossen, 1994). Para determinar as rajadas de vento será utilizado no presente trabalho, o espectro de Harris (Harris, 1971), expresso por:
6 5 2
286 2
1146 )
(
−
+ ⋅ ⋅ ⋅ =
V V
V
V V
C
S ω ω (2.4)
sendo SV a densidade espectral (m2/s), ωa freqüência de oscilação da velocidade do vento, e C um coeficiente de arraste superficial.
Por exemplo, para uma velocidade média de vento de 20m/s e coeficiente de arraste superficial igual a 0.02, obtém-se a seguinte curva para o espectro de Harris:
18 A série temporal da velocidade do vento VV(t) pode ser obtida por
transformação inversa de Fourier na sua forma discreta:
= + ∆ = n i i i i V
V t S t
V 1 ) cos( ) ( 2 )
( ω ω ω φ (2.5)
sendo
{
ω1,...,ωn}
uma partição do intervalo de freqüências de interesse e φi, uma fase aleatória dependente da freqüência.2.2.2 Forças de Correnteza
Considera-se um corpo fluido sob ação de uma correnteza constante. Desprezam-se efeitos de superfície livre (geração de ondas) e de profundidade finita. O corpo possui movimento translacional com velocidade constante em relação à Terra.
Seja VC o módulo da velocidade da correnteza, α a sua direção de incidência em relação ao sistema solidário ao casco e θ a sua direção em relação
ao sistema fixo (θ =α +ψ ), conforme ilustra a Figura 2.6.
Figura 2.6: Definições para modelo estático de correnteza.
A velocidade da embarcação em relação ao fluido, Ur(t), é dada por:
j i
Ur(t) = u(t) + v(t) (2.6)
onde u(t) e v(t) são as componentes da velocidade Ur(t) em relação ao sistema solidário à embarcação e são dadas pelas equações (2.7) e (2.8).
19 ) ( cos ) ( )
(t x1 t V t
u = − C α (2.7)
) ( sen ) ( )
(t x2 t V t
v = − C α (2.8)
A velocidade da correnteza em relação ao casco e a sua direção de incidência relativa são dadas por (2.9) e (2.10), respectivamente:
2 2
v u
Vcr = + (2.9)
) / arctan(v u
r =π +
α (2.10)
As forças e o momento devidos à correnteza são compostos por duas parcelas: a parcela estática que dependem dos termos u(t) e v(t), sendo que para
esta, a velocidade de rotação do casco é considerada nula (r=ψ =0).
A segunda parcela é devida à rotação do casco: ) ; ; ( ) ( 5 . 0 ) ; ;
( 2 1 1
1 u v r V L T C F u v r
FC = ⋅ρ⋅ cr ⋅ ⋅ ⋅ C αr + ∆ C
) ; ; ( ) ( 5 . 0 ) ; ;
( 2 2 2
2 u v r V L T C F u v r
FC = ⋅ρ⋅ cr ⋅ ⋅ ⋅ C αr + ∆ C (2.11)
) ; ; ( ) ( . 5 . 0 ) ; ;
( 2 2 6 3
6 u v r V L T C F u v r
FC = ⋅ρ ⋅ cr ⋅ ⋅ ⋅ C αr + ∆ C
onde a primeira parcela é relativa à parte estática e a segunda à parte dinâmica, sendo F1C e F2C são as forças nas direções longitudinais (surge) e transversais (sway) respectivamente; F6C é o momento de yaw; ρ é a densidade da água; L é o comprimento da embarcação; T é o calado da embarcação e C1C, C2C e C6C são os coeficientes estáticos adimensionais de correnteza.
Os coeficientes C1C, C2C e C6C são obtidos experimentalmente, ou seja, por
20
Coeficientes de Correnteza Frontais
-0,15 -0,1 -0,05 0 0,05 0,1 0,15
0 50 100 150 200 250 300 350
Incidência (°)
C
1c
Carregada Lastro
Coeficientes de Correnteza Transversais
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1
0 50 100 150 200 250 300 350 400
Incidência (°)
C
2c
Carregada Lastro
(a) Coeficientes de Correnteza Frontais (b) Coeficientes de Correnteza Transversais
Coeficentes de Momento de Correnteza
-0,15 -0,1 -0,05 0 0,05 0,1 0,15
0 50 100 150 200 250 300 350
Incidência (°)
C
6c
Carregada Lastro
(c) Momento de Correnteza
Figura 2.7: Coeficientes estáticos adimensionais de correnteza.
As parcelas dinâmicas são calculadas pela extensão do Modelo de Asa Curta (Simos et al (2001)).
2.2.3 Forças de Ondas
As ondas geradas na superfície do mar decorrem, principalmente, da ação do vento. Regiões de tempestade são, naturalmente, zonas de geração de ondas. Nessas regiões, de um modo geral, são produzidas ondas de diferentes freqüências, as quais se propagarão em diferentes direções.
21 2 2 1 exp 4 5 2 25 . 1 exp ) ( − − ⋅ − ⋅ ⋅ = σ ω ω γ ω ω ω α ω p p g S (2.12)
sendo ωp a freqüência de pico , o parâmetro σ dado por:
> ≤ = p p p p ω ω ω ω σ / 09 . 0 / 07 . 0 (2.13)
e o parâmetro α calculado através da equação abaixo:
2 4 2 )] ln( 287 . 0 1 [ 3125 . 0 g
Hs ωp γ
α = ⋅ ⋅ ⋅ − ⋅ (2.14)
onde Hs é a altura significativa da onda. Por exemplo, para = 5.5m
s
H , γ = 2.5 e = 11.4s
P
T uma, obtém o seguinte
espectro de JONSWAP:
Figura 2.8: Espectro de JONSWAP para HS = 5.5m e Tp = 11.4s
Os esforços devidos às ondas dividem-se em forças de primeira ordem e segunda ordem. As forças de primeira ordem são formadas por componentes de alta freqüência (mesma faixa de freqüência do espectro de ondas), responsáveis pela excitação dos movimentos de heave, pitch e roll do navio. Há também excitação dos movimentos horizontais (surge, sway e yaw). São proporcionais à altura das ondas.
22 parcela constante, chamada força de deriva média, e outra parcela que varia lentamente no tempo, chamada de força de deriva lenta.
Em um sistema de posicionamento dinâmico convencional, o controle atua no sentido de reduzir o movimento de deriva lenta e compensar a deriva média, esforços de corrente e vento. Os movimentos de primeira ordem não são eliminados na medida em que exigiriam um esforço de controle muito elevado (devido à alta freqüência). Os mesmos são filtrados das medidas por meio dos chamados “filtros de onda”, detalhados na seção 4.2. Um modelo completo do cálculo dos movimentos de primeira ordem, utilizado nas simulações, pode ser encontrado em Tannuri (2002).
As forças e momentos de deriva média são calculados segundo:
∞ = = 0 6 2 , 1 , ). , ( ). ( .
2 S D d j ou
FjDM ω j ω βo ω (2.15)
onde S(ω) é o espectro de potência das ondas, Dj os coeficientes de deriva do
casco e βo a direção de incidência da onda. Os coeficientes de deriva são obtidos
por cálculo potencial, utilizando-se programas tais como o WAMIT.
As forças de deriva lenta são calculadas, então, aplicando-se a transformada inversa de Fourier na forma discreta, dada por:
6 2 , 1 , ) cos( 2 ) ( 1 ou j t S t F n i i i jDL
jDL = ∆ + =
=
φ µ
µ (2.16)
sendo φi uma fase aleatória dependente da freqüência e SjDL os espectros das forças de deriva lenta em surge, sway e do momento de yaw descritos por:
(
)
[
]
j 1,2ou 6 ) , ( ) ( 8 )( 0 2
0 2 0 2 = + = ∞ ω µ ω β ω ω
µ S D d O
SjDL j (2.17)
2.3 Diagrama Completo do Modelo Matemático do Sistema
23
Figura 2.9: Diagrama de blocos dos movimentos horizontais de baixa freqüência.
Modelo da Embarcação
Equação (2.1)
Forças de Vento
Equação (2.2) G z x I M M M M M , , , , , , 26 66 22 11
Forças de Correnteza
Equação (2.11)
Forças de Ondas
Equações (2.15) e (2.16)
Forças Ambientais
V V
V F F
F1 , 2 , 6
C C
C F F
F1 , 2 , 6
6 2 1,F,F
F
DL DL
DL F F
F1 , 2 , 6
+ + + propulsor F ambientais F x x C VV,βV,
x α , C V Onda de Espectro T HS, P,βO
Movimentos de 1ª ordem
Total x Total x x x dt d
Modelo da Embarcação
Equação (2.1)
Forças de Vento
Equação (2.2) G z x I M M M M M , , , , , , 26 66 22 11
Forças de Correnteza
Equação (2.11)
Forças de Ondas
Equações (2.15) e (2.16)
Forças Ambientais
V V
V F F
F1 , 2 , 6
C C
C F F
F1 , 2 , 6
6 2 1,F,F
F
DL DL
DL F F
F1 , 2 , 6
+ + + propulsor F ambientais F x x C VV,βV,
x α , C V Onda de Espectro T HS, P,βO
Movimentos de 1ª ordem
Total x Total x x x
Modelo da Embarcação
Equação (2.1)
Forças de Vento
Equação (2.2) G z x I M M M M M , , , , , , 26 66 22 11
Forças de Correnteza
Equação (2.11)
Forças de Ondas
Equações (2.15) e (2.16)
Forças Ambientais
V V
V F F
F1 , 2 , 6
C C
C F F
F1 , 2 , 6
6 2 1,F,F
F
DL DL
DL F F
F1 , 2 , 6
+ + + propulsor F ambientais F x x C VV,βV,
x α , C V Onda de Espectro T HS, P,βO
Modelo da Embarcação
Equação (2.1)
Forças de Vento
Equação (2.2) G z x I M M M M M , , , , , , 26 66 22 11
Forças de Correnteza
Equação (2.11)
Forças de Ondas
Equações (2.15) e (2.16)
Forças Ambientais
V V
V F F
F1 , 2 , 6
C C
C F F
F1 , 2 , 6
6 2 1,F,F
F
DL DL
DL F F
F1 , 2 , 6
+ + + propulsor F ambientais F x x C VV,βV,
x α , C V Onda de Espectro T HS, P,βO
Movimentos de 1ª ordem
24
3 CONTROLE NÃO LINEAR
Neste capítulo será apresentado o projeto do controlador, baseado na metodologia de controle não linear desenvolvida por Utkin (1978) e denominada de controle por modos deslizantes (Sliding Modes).
O controlador projetado recebe as informações do posicionamento real da embarcação (vindo do sistema de sensoriamento) e envia os sinais de atuação para os propulsores de forma a levá-la à posição desejada.
Através desta metodologia, mostra-se que é possível alcançar um bom desempenho perante as incertezas do modelo. Entretanto, este desempenho é obtido com esforços de controle elevados e muito oscilatórios. Assim, uma modificação nessa técnica foi então realizada por Slotine (1984) de forma a garantir menores esforços de controle em face de pequena degradação no desempenho global do sistema. Portanto, a abordagem matemática empregada no presente trabalho baseia-se nesta versão, que foi detalhadamente exposta em Slotine e Li (1991).
Como foi anteriormente mencionada, uma grande vantagem deste controlador é a facilidade no ajuste dos parâmetros. Como será visto nas próximas seções, o controlador requer no máximo três parâmetros por movimento, sendo que todos possuem uma interpretação matemática bastante simples, facilitando o cálculo dos mesmos. Como o controlador é baseado no modelo não linear do sistema, não requer um novo ajuste de parâmetros em caso de mudança de ponto de operação ou de variação das condições ambientais.
No modelo do sistema, utilizado na malha de compensação direta (feedforward), admitem-se faixas de erros, graças à robustez do controlador. Assim, não é necessária a realização exaustiva de testes no mar para a sintonia do modelo, como é feito nos controladores atuais baseados em modelo. O termo de robustez também garante o bom desempenho e estabilidade da malha de controle em face de erros nas estimativas das condições ambientais.
25 Assim, para uma melhor compreensão da formulação teórica dos controladores, dividiu-se a teoria em duas partes: linearização por realimentação e controle por modos deslizantes.
3.1 Linearização por realimentação
A linearização por realimentação é uma técnica que permite construir uma lei de controle de tal forma que o sistema não-linear em malha fechada se comporte como um sistema linear, eliminando-se parte das não-linearidades do sistema.
Considera-se o modelo de um sistema não-linear de ordem n com uma
única entrada, descrito pela equação abaixo: , 3 , 2 ) ( ) , ( ) , ( ) ( = + +
= f t b t u d t n
xn x x (3.1)
onde n a ordem do sistema x é o vetor de estados do sistema,
T n
x x
x ... ]
[ ( −1)
=
x ; x é a saída de interesse; u é a entrada de controle; d(t) é um
distúrbio e f(x,t) e b(x,t) são funções genéricas conhecidas com uma faixa limitada
de incertezas. Visando facilitar a notação, será suprimida a variável t das equações. Para manter a saída próxima da referência desejada xd, uma lei de controle para o sistema de malha fechada pode ser dada por (visando facilitar a notação, será suprimida a variável t das equações):
) ( 1
f b
u= ⋅ν− (3.2)
onde b ≠ 0, ( 1)
1 1 0 ) ( ~ ... ~ ~ − − − − − − = n n n
d k x k x k x
x
ν , ~x(t)= x(t)−xd(t) é o erro de
acompanhamento e os parâmetros ki são convenientementeescolhidos de tal forma
que o polinômio 1 0
1p ... k
k
pn+ n− n−+ + possua todas as raízes estritamente no semi-plano
esquerdo do plano complexo.
Substituindo (3.2) em (3.1), tem-se: ν = ) (n x x k x k x k x
x(n) = d(n) − n−1~(n−1) −...− 1~ − 0~
x k x k x k x
26
x k x k x
k
x n n ~n ... ~ ~
~
0 1 )
1 ( 1 )
(
− − − −
= −
−
0 ~ ~ ... ~
~
0 1 )
1 ( 1 ) (
= + + +
+ −
− x k x k x
k
x n n n (3.3)
onde (3.3) representa a dinâmica do erro de acompanhamento do sistema em malha fechada. Verifica-se que o erro de acompanhamento converge exponencialmente para um valor nulo, ou seja, ~x(t)→0. Por exemplo, para um sistema de 2a ordem, ou seja, n = 2, a equação (3.3) será reduzida a x~ + k1~x + k0x~ = 0.
Esta técnica só é válida se o modelo matemático do sistema, ou seja, as funções f(x,t) e b(x,t), forem bem conhecidas e livre de incertezas. No caso de
sistemas com incertezas no modelo, a dinâmica em malha fechada (3.3) não será respeitada e essa técnica não é aplicável diretamente. Portanto, deve-se recorrer à técnica do controle por modos deslizantes.
3.2 Controle não linear por modos deslizantes
A metodologia de controle não-linear por modos deslizantes (SMC), conhecida como sliding mode control, foi desenvolvida por Utkin (1978) e posteriormente modificada e adaptada por Slotine e Li (1991).
Essa técnica consiste basicamente em se reduzir o problema de controle de um sistema genérico, descrito por equações não-lineares de ordem n, para um
sistema de 1a ordem, com incertezas nos parâmetros e/ ou em sua própria estrutura matemática. Assim, dado um sistema descrito por equações de estado sendo a entrada um termo descontínuo através de uma superfície definida no espaço de estado, a metodologia de SMC consiste em projetar uma lei de controle capaz de fazer com que todas as trajetórias desse sistema convirjam para a tal superfície, chamada de superfície deslizante S(t). Em algumas publicações tal superfície
também é denominada de superfície de escorregamento ou superfície de deslizamento. No presente trabalho usaram-se as três denominações para fazer referência à superfície S(t).
A dinâmica desta superfície deve ser escolhida pelo projetista de modo que todas as trajetórias dentro da superfície S(t) convirjam para os valores desejados