UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
Universidade Federal do Rio Grande do Norte Centro de Tecnologia
Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica e de Computa¸c˜ao
Algoritmo eficiente para aquisi¸
c˜
ao de
sinais de GPS por software
Fabr´ıcio Costa Silva
Orientador: Prof. Dr. Samuel Xavier de Souza
Disserta¸c˜ao de Mestrado apresentada ao Programa de P´os-Gradua¸c˜ao em En-genharia El´etrica e de Computa¸c˜ao da UFRN (´area de concentra¸c˜ao: Engenharia de Computa¸c˜ao) como parte dos requisi-tos para obten¸c˜ao do t´ıtulo de Mestre em Ciˆencias.
Seção de Informação e Referência
Catalogação da Publicação na Fonte. UFRN / Biblioteca Central Zila Mamede Silva, Fabrício Costa.
Algoritmo eficiente para aquisição de sinais de GPS por software / Fabrício Costa Silva. – Natal, RN, 2015.
65f.
Orientador: Samuel Xavier de Souza.
Dissertação (Mestrado em Engenharia Elétrica e de Computação) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia – Programa de Pós-Graduação em Engenharia Elétrica e de Computação.
1. Receptor de sinal - Dissertação. 2. Aquisição de sinal - Dissertação. 3. Processamento de sinais – Dissertação. 4. Variância – Dissertação. I. Souza, Samuel Xavier de. II. Título.
Resumo
O NAVSTAR/GPS (NAVigation System with Timing And Ranging/Global Po-sitioning System), mais conhecido por GPS, ´e um sistema de navega¸c˜ao baseado em sat´elites desenvolvido pelo departamento de defesa norte-americano em meados de 1970. Criado inicialmente para fins militares, o GPS foi adaptado para o uso civil. Para fazer a localiza¸c˜ao, o receptor precisa fazer a aquisi¸c˜ao de sinais dos sat´elites vis´ıveis. Essa etapa ´e de extrema importˆancia, pois ´e respons´avel pela detec¸c˜ao dos sat´elites vis´ıveis, calculando suas respectivas frequˆencias e fases iniciais. Esse processo pode demandar bastante tempo de processamento e precisa ser implemen-tado de forma eficiente. V´arias t´ecnicas s˜ao utilizadas atualmente, mas a maioria delas colocam em conflito quest˜oes de projeto tais como, complexidade computaci-onal, tempo de aquisi¸c˜ao e recursos computacionais. Objetivando equilibrar essas quest˜oes, foi desenvolvido um m´etodo que reduz a complexidade do processo de aquisi¸c˜ao utilizando algumas estrat´egias, a saber, redu¸c˜ao do efeito doppler, amos-tras e tamanho do sinal utilizados, al´em do paralelismo. Essa estrat´egia ´e dividida em dois passos, um grosseiro em todo o espa¸co de busca e um fino apenas na regi˜ao identificada previamente pela primeira etapa. Devido `a busca grosseira, o limiar do algoritmo convencional n˜ao era mais aceit´avel. Nesse sentido, um novo limiar foi estabelecido baseado na variˆancia dos picos de correla¸c˜ao. Inicialmente, ´e feita uma busca com pouca precis˜ao comparando a variˆancia dos cinco maiores picos de cor-rela¸c˜ao encontrados. Caso a variˆancia ultrapasse um certo limiar, a regi˜ao de maior pico torna-se candidata `a detec¸c˜ao. Por fim, essa regi˜ao passa por um refinamento para se ter a certeza de detec¸c˜ao. Os resultados mostram que houve uma redu¸c˜ao significativa na complexidade e no tempo de execu¸c˜ao, sem que tenha sido necess´ario utilizar algoritmos muito complexos.
Abstract
The NAVSTAR / GPS (Navigation System with Timing And Ranging/Global Positioning System), better known as GPS, is a navigation system based on satellites developed by the US Department of Defense. It was discovered in the mid 70s. Initially created for military purposes, GPS has been adapted for civilian use. To location, the receiver needs to acquire signals from the visible satellites. This step is extremely important because it is responsible for the detection of visible satellites, calculating their respective frequencies and initial phases. This process may require a lot of processing time and needs to be implemented efficiently. Several techniques are currently being used, but most of them pose conflicting design issues such as computational complexity, acquisition time and computational resources. In order to balance these issues, we developed a method that reduces the complexity of the search process using some strategies, namely, reducing the Doppler, signal samples and size of the signal used in addition to parallelism. This strategy is divided into two steps, a coarse search throughout the space and only in a thin region previously identified by the first step. Due to the coarse search, the conventional algorithm threshold was no longer acceptable. Accordingly, a new threshold is set based on the variance of the correlation peaks. Initially, a search is made with little accuracy by comparing the variance of the five largest correlation peaks found. If the variance exceeds a certain threshold, the highest peak region becomes a candidate for detection. Finally, this region undergoes a refinement to make sure of detection. The results show that there was a significant reduction in complexity and at runtime, without being necessary to use very complex algorithms.
Sum´
ario
Lista de Figuras iii
Lista de Tabelas vii
1 Introdu¸c˜ao 1
1.1 Motiva¸c˜ao . . . 1
1.2 Objetivos . . . 3
1.3 Justificativa . . . 3
1.4 Organiza¸c˜ao do trabalho . . . 4
2 Estado da arte 5 2.1 Contribui¸c˜oes recentes . . . 5
3 GPS 9 3.1 Hist´orico . . . 9
3.2 Aplica¸c˜oes do GPS . . . 10
3.3 Fundamentos . . . 11
3.3.1 Segmentos . . . 12
3.3.2 Como um receptor funciona . . . 12
3.4 GPS por software . . . 15
3.5 Sinal de GPS . . . 15
3.5.1 Gera¸c˜ao do c´odigo CA . . . 16
3.5.2 CDMA . . . 16
3.6 Aquisi¸c˜ao de sinal . . . 19
3.6.1 Aquisi¸c˜ao convencional . . . 20
4 Detec¸c˜ao de Sinais de GPS em Dois Passos 25 4.1 Aquisi¸c˜ao Direta em Dois Passos . . . 25
4.1.1 A Busca Grosseira - Primeiro Passo . . . 26
4.1.2 As Quatro Dimens˜oes da Busca . . . 27
4.1.3 A Busca Fina - Segundo Passo . . . 31
4.1.4 A Variˆancia dos Picos de Correla¸c˜ao como Limiar de Detec¸c˜ao 32 4.1.5 Fluxograma e Pseudoc´odigo . . . 34
4.2 Detec¸c˜ao Fria em Paralelo . . . 35
5 Resultados 43 5.1 Estat´ısticas da Busca . . . 44
5.2 Busca por Sat´elites Vis´ıveis . . . 45
5.3 Busca Fria Paralela . . . 49
5.4 Busca por Sat´elite n˜ao Vis´ıvel . . . 51
5.5 Compara¸c˜ao com o M´etodo de Aquisi¸c˜ao Baseado na FFT . . . 51
6 Conclus˜ao 55 6.1 Trabalhos Futuros . . . 56
Referˆencias bibliogr´aficas 56 A Informa¸c˜oes adicionais 61 A.1 Algoritmo de gera¸c˜ao de C´odigos CA. . . 61
Lista de Figuras
3.1 Representa¸c˜ao das distˆancia entre receptor e 4 sat´elites. Duas infor-ma¸c˜oes est˜ao representadas nesta imagem, a posi¸c˜ao de cada sat´elite e a distˆancia entre cada sat´elite e o receptor. Essas informa¸c˜oes s˜ao necess´arias para o c´alculo da posi¸c˜ao do usu´ario. . . 12
3.2 Estrutura b´asica de um receptor GPS. A primeira etapa aborda a recep¸c˜ao e digitaliza¸c˜ao do sinal numa frequˆencia intermedi´aria feitos em hardware. A segunda parte ´e o processamento do sinal em banda base realizada em software. Fonte: [Tsui 2005] . . . 14
3.3 Digrama de Gera¸c˜ao de Sinal. As sa´ıdas deste diagrama de modula¸c˜ao ´e composta pelos sinais L1 e L2. O sinal L1 ´e a jun¸c˜ao de uma portadora na frequˆencia de 1575.42MHz com o c´odigo CA do sat´elite e tamb´em a mensagem de navega¸c˜ao. A modula¸c˜ao ´e feita em fase e o sinal obtido ´e BPSK. . . 17
3.4 Esquema de gera¸c˜ao do C´odigo CA. Cada sat´elite tem um c´odigo associado que ´e resultado da opera¸c˜ao ou-exclusivo entre dois regis-tradores de deslocamento de tamanho dez, G1 e G2. Este diagrama mostra como ´e gerado o c´odigo CA de cada sat´elite. O que determina o sat´elite s˜ao as casas escolhidas pelas linha tracejadas do diagrama, cada combina¸c˜ao indica um sat´elite diferente. Quando o algoritmo inicia, todas as posi¸c˜oes dos registradores s˜ao iguais a 1. . . 17
3.5 Espalhamento de espectro. Nesse modo de transmiss˜ao as informa¸c˜oes de interesse s˜ao espalhadas de forma a ocupar uma largura de banda de transmiss˜ao muito maior que m´ınimo necess´ario para enviar as informa¸c˜oes. 1 bit de informa¸c˜ao ´e espalhado sobre 20 c´odigos CAs. Fonte: Adaptado de [Borre et al. 2007] . . . 18
3.6 Matriz de busca. Esta Figura representa o espa¸co de busca de um sat´elite. Na dimens˜ao do Doppler h´a inicialmente, na posi¸c˜ao fc, a
frequˆencia central. Acima e abaixo dessa posi¸c˜ao est´a representado o poss´ıvel deslocamento de frequˆencia de df KHz. Na outra dimens˜ao est˜ao representadas as 1023 diferentes fases que o sinal pode assumir. Se o sinal buscado estiver presente no sinal recebido, essa fase deve ser alinhada para que haja um pico de correla¸c˜ao. . . 21
3.7 Esquema de funcionamento do algoritmo convencional. O sinal rece-bido ´e dividido em fase e quadratura e cada componente e multipli-cado pelo PRN busmultipli-cado. O sinal resultante ´e acumulado na fase de integra¸c˜ao e elevado ao quadrado em seguida. Ao final o quadrado da acumula¸c˜ao dos dois componentes s˜ao somados. Se houver um pico nesta soma, o sinal foi detectado. . . 22
3.8 Gr´afico de correla¸c˜ao 3D de um sinal encontrado. . . 23
4.1 Exemplo de amostragem de um c´odigo CA. A amostragem de um chip ´e apresentada com um zoom. A estrat´egia de recupera¸c˜ao do sinal original a partir do sinal amostrado, implica em recuperar uma amostra em cada m. O sinal completo tem n/1023 sub-vetores de amostragem de tamanho m. . . 28
4.2 Compara¸c˜ao entre busca com boa resolu¸c˜ao de doppler m´aximo e com resolu¸c˜ao reduzida para o sat´elite 25 com amostragem m´axima. A parte (a) ´e a execu¸c˜ao com precis˜ao m´axima. A parte (b) tem resolu¸c˜ao grosseira na dimens˜ao de frequˆencia. . . 29
4.3 Compara¸c˜ao entre a correla¸c˜ao baseada no incremento progressivo das mostras do sinal. Esta figura mostra que `a medida que se utiliza mais amostras, o valor do pico de correla¸c˜ao tem um aumento. O algoritmo explora essa propriedade para utilizar um sinal menor. O total de amostras para o sinal desta figura ´e de 11999, mas com 200 j´a se pode detectar um poss´ıvel pico. . . 38
4.4 Itera¸c˜oes do algoritmo. . . 39
4.6 Com o m´etodo proposto h´a a possibilidade de detec¸c˜ao de falsos picos e que aumenta o processamento pois v´arias chamadas `a busca fina ser´a feita. Se aumentarmos o limiar o processamento tamb´em aumenta, pois ser´a preciso fazer mais processamento para se atingir o pico. . . . 40 4.7 Poss´ıveis valores de variˆancia para dois picos de correla¸c˜ao
normali-zados. O valor m´aximo de variˆancia ´e 0.5 . . . 40 4.8 Fluxograma do algoritmo principal. . . 41 4.9 Fluxograma do algoritmo paralelo. . . 42
5.1 Busca de trˆes sat´elites. Este gr´afico mostra o tempo de execu¸c˜ao para trˆes sat´elite e trˆes algoritmos diferentes. O algoritmo sem redu¸c˜ao foi apresentado apenas para mostrar a importˆancia de se utilizar menos amostras que o sinal completo. . . 47 5.2 Compara¸c˜ao do resultado da correla¸c˜ao para as duas estrat´egias. Este
gr´afico mostra que exatamente o mesmo resultado ´e obtido com o algoritmo convencional e o proposto. . . 47 5.3 Estes gr´aficos s˜ao resultado do processo de correla¸c˜ao convencional
aplicado a eles. Todo o espa¸co de busca foi explorado com precis˜ao. . 48 5.4 Correla¸c˜ao do sat´elite 1 obtida pelo algoritmo proposto. Apenas a
regi˜ao do pico foi explorada, pois ´e a ´unica ´area que interessa. Isso reduziu drasticamente a complexidade e o tempo computacional. . . . 49 5.5 Busca fria . . . 50 5.6 Compara¸c˜ao no melhor caso. A compara¸c˜ao de melhor caso ocorre
quando h´a pelo menos quatro sinais fortes presentes na busca. Este teste foi realizado explicando o sinal 25, que ´e forte, quatro vezes. O algoritmo convencional independe da qualidade do sinal, pois a complexidade da busca nele ´e fixa. . . 50 5.7 Correla¸c˜ao do sat´elite 7 n˜ao detectado. Neste gr´afico n˜ao se nota
nenhuma regi˜ao com pico que se destaque das demais. Os valores s˜ao muito inferiores. Foi utilizado o algoritmo convencional, pois o algoritmo proposto n˜ao gera gr´afico de sinais n˜ao encontrados. Este imagem ´e apenas ilustrativa para mostrar que b˜ao h´a pico. . . 51 5.8 Estes s˜ao gr´afico gerados pelo algoritmo da FFT(esqueda) e o
Lista de Tabelas
5.1 Rela¸c˜ao de tempo para fazer a primeira localiza¸c˜ao para alguns re-ceptores comerciais. . . 44 5.2 Algoritmo proposto com limiar Grosseiro de 4x10−2 e limiar fino de
1.8x10−1 . . . 45 5.3 Algoritmo convencional com limiar de detec¸c˜ao de 3x105
. . . 45 5.4 Algoritmo convencional com limiar de detec¸c˜ao de 5x105
. . . 45 5.5 Algoritmo convencional com limiar de detec¸c˜ao de 8x105
. . . 46
Cap´ıtulo 1
Introdu¸
c˜
ao
O NAVSTAR/GPS (NAVigation System with Timing And Ranging/Global Position-ing System), mais conhecido apenas por GPS, ´e um sistema de navega¸c˜ao baseado em sat´elites desenvolvido pelo departamento de defesa norte americano em mea-dos de 1970. Limita¸c˜oes como altitude, velocidade de deslocamento, tamanho do efeito do Doppler suportado, entre outras, s˜ao impostas para quem deseja utilizar os receptores dispon´ıveis no mercado, nesse sentido, este trabalho abordar´a parte da constru¸c˜ao de um receptor de GPS que tenha menos limita¸c˜oes.
Neste cap´ıtulo s˜ao apresentados inicialmente as motiva¸c˜oes, objetivos e justifica-tivas para o desenvolvimento deste trabalho. Logo ap´os, ser´a apresentada a divis˜ao do trabalho para que o leitor possa se situar em rela¸c˜ao ao texto.
1.1
Motiva¸
c˜
ao
2 CAP´ITULO 1. INTRODU ¸C ˜AO
de aproxima¸c˜ao ou afastamento entre a fonte de observa¸c˜ao e o objeto observado. Os chips amplamente utilizados na ind´ustria n˜ao permitem esta configura¸c˜ao, im-pedindo a utiliza¸c˜ao em ve´ıculos de alta dinˆamica. Tsui (2005) afirma que, para ve´ıculos de baixa dinˆamica, o sinal proveniente dos sat´elites de GPS sofre um deslo-camento de frequˆencia resultante do efeito Doppler de aproximadamente±5kHz em rela¸c˜ao a frequˆencia central. Para ve´ıculos de alta dinˆamica o doppler pode chegar a valores muito maiores como 50KHz [Peng et al. 2011].
As limita¸c˜oes n˜ao se restringem ao Doppler, a altitude ´e limitada a aproxima-damente 18300 metros e a velocidade m´axima de deslocamento ´e de 515 m/s. S˜ao v´arias limita¸c˜oes al´em das citadas que podem ser encontradas nos manuais do re-ceptores dispon´ıveis no mercado.
A compra de receptores que ultrapassem os limites estabelecidos para receptores comerciais ´e submetida a um processo r´ıgido de controle pelos norte-americanos. O comprador fica limitado quanto a adapta¸c˜ao de acordo com suas necessidades. Na pr´atica, s´o o governo americanos e aliados podem utilizar o GPS em sua capacidade m´axima.
Outro ponto importante ´e a forma de constru¸c˜ao destes receptores. A maioria dos receptores comerciais s˜ao implementados em hardware por ser menos custoso, em contrapartida perde-se flexibilidade. O desenvolvimento de um receptor em software traz a possibilidade de reconfigura¸c˜ao e uso de novos algoritmos.
Desde a emiss˜ao do sinal pelo sat´elite at´e o c´alculo da posi¸c˜ao do usu´ario, v´arias etapas s˜ao necess´arias. A aquisi¸c˜ao do sinal ´e uma etapa muito estudada atualmente, pois p˜oe em conflito algumas quest˜oes de projeto, como complexidade computaci-onal, tempo de execu¸c˜ao e recursos de hardware. A complexidade computacional est´a relacionada com o n´umero de opera¸c˜oes relevantes que o algoritmo executa. Os recursos de hardware representam os tipos de circuitos utilizados para fazer tais opera¸c˜oes. Existem algoritmos extremamente eficientes, mas com alto custo em re-cursos computacionais, por outro lado existem tamb´em algoritmos com baixo custo de recursos computacionais e alto tempo de execu¸c˜ao. Alguns conseguem aliar baixa complexidade e baixo tempo de execu¸c˜ao, mas apresentam alto custo de recursos computacionais. Ent˜ao, a motiva¸c˜ao principal desse trabalho ´e tentar conseguir um equil´ıbrio entre complexidade computacional, tempo de execu¸c˜ao e recursos compu-tacionais num receptor em software.
indispen-1.2. OBJETIVOS 3
s´aveis ao avan¸co industrial e `a conquista da necess´aria autonomia nacional em ativi-dade t˜ao estrat´egica. Esse dom´ınio s´o se alcan¸ca com intensa e efetiva participa¸c˜ao sin´ergica do governo, centros de pesquisa, universidades e ind´ustrias [AEB n.d.].
1.2
Objetivos
Este trabalho tem como objetivo principal o desenvolvimento de uma alternativa aos algoritmos de aquisi¸c˜ao de sinais utilizados atualmente em receptores de GPS por software. O algoritmo deve balancear as quest˜oes de projeto como complexidade computacional, tempo de execu¸c˜ao e recursos computacionais. A etapa de aquisi¸c˜ao deve ser bem otimizada, pois ´e de fundamental importˆancia para a cria¸c˜ao de um receptor reconfigur´avel eficiente. Para se conseguir esse objetivo principal, ser´a preciso realizar objetivos secund´arios, s˜ao eles:
• Implementar o algoritmo gerador de c´odigo para determinado sat´elite • Implementar a vers˜ao convencional do algoritmo de aquisi¸c˜ao
• Paralelizar o algoritmo de aquisi¸c˜ao • Validar o algoritmo proposto
• Comparar o algoritmo convencional e o proposto
1.3
Justificativa
A escolha do tema relacionado a GPS foi motivada por projetos anteriores rea-lizados no ˆambito da UFRN. Analisando a pesquisa sobre o tema e as experiˆencias de projetos passados, viu-se que a pesquisa sobre GPS no Brasil ainda ´e pouco ex-plorada se comparada com outros pa´ıses como EUA e China. Uma das ´area que o GPS pode ser aplicado ´e no programa espacial brasileiro, mas o Brasil est´a muito atr´as neste setor, sofrendo com baixo investimento e falta de comando unificado. Em 2015, apenas 300 milh˜oes de reais ser˜ao investidos no setor.
O dom´ınio da tecnologia de receptores ´e essencial para diversas ´areas, principal-mente a militar. Os chips utilizados em equipamentos militares, sat´elites e foguetes lan¸cados pelo Brasil s˜ao fabricados no exterior. Isso refor¸ca a necessidade do desen-volvimento de solu¸c˜oes nacionais para uma maior confiabilidade e transparˆencia.
4 CAP´ITULO 1. INTRODU ¸C ˜AO
independˆencia tecnol´ogica, visto que v´arias limita¸c˜oes s˜ao imposta para compra de receptores mais precisos.
Por fim, o tema ´e atual e representa uma experiˆencia te´orica e pr´atica para a forma¸c˜ao acadˆemica pretendida pelo autor.
1.4
Organiza¸
c˜
ao do trabalho
Este trabalho est´a dividido em sete cap´ıtulos.
Cap´ıtulo 2: Uma revis˜ao de literatura foi realizada para verificar o que se tem produzido atualmente em rela¸c˜ao `a etapa de aquisi¸c˜ao de sinais de GPS. Foi feito um levantamento de trabalhos que est˜ao relacionados com o processo de aquisi¸c˜ao de sinais de GPS. Ser˜ao apresentados alguns artigos que abordam as principais estrat´egias de aquisi¸c˜ao de sinais de GPS.
Cap´ıtulo 3: Aborda a teoria sobre o funcionamento dos receptores GPS para que o leitor possa ter uma vis˜ao geral de seu funcionamento. Al´em disso, a estru-tura do sinal, a forma de modula¸c˜ao, transmiss˜ao e gera¸c˜ao dos sinais de GPS s˜ao apresentados neste cap´ıtulo.
Cap´ıtulo 4: E apresentado o algoritmo desenvolvido para a fase de aquisi¸c˜ao´ de sinais. O algoritmo ´e detalhado num pseudo-c´odigo e fluxograma para melhor entendimento do leitor.
Cap´ıtulo 5: Este cap´ıtulo apresenta os resultados obtidos nos experimentos realizados. ´E feita a compara¸c˜ao com algoritmos existentes e v´arios gr´aficos s˜ao apresentados para que o leitor possa visualizar melhor os resultados.
Cap´ıtulo 6: As conclus˜oes s˜ao relatadas e discutidas neste cap´ıtulo, que aborda tamb´em trabalhos futuros.
Cap´ıtulo 2
Estado da arte
Neste cap´ıtulo ser˜ao apresentados os trabalhos mais recentes que a comunidade cient´ıfica vem desenvolvendo a respeito da etapa de aquisi¸c˜ao de sinais em software.
2.1
Contribui¸
c˜
oes recentes
O processo de aquisi¸c˜ao de um sinal de GPS pode ser encarado por duas pers-pectivas de implementa¸c˜ao. A primeira e muito utilizada, ´e a implementa¸c˜ao em hardware que usa o m´etodo tradicional de aquisi¸c˜ao, que ´e uma implementa¸c˜ao sequencial em harware. A segunda ´e realizada em software, tendo a Transformada R´apida de Fourier (FFT, do inglˆes: Fast Fourier Transform) como protagonista desta abordagem. Atualmente as pesquisas se concentram mais na melhoria da aquisi¸c˜ao baseada na FFT do que na aquisi¸c˜ao convencional no dom´ınio do tempo. A principal diferen¸ca entre as duas s˜ao tempo e custo de implementa¸c˜ao. A aquisi¸c˜ao conven-cional tem baixo custo e alto tempo de resposta. A aquisi¸c˜ao baseada na FFT tem alto custo e baixo tempo de resposta.
Algumas m´etricas tem sido utilizadas para comparar os diferentes m´etodos de aquisi¸c˜ao de sinais, tais como complexidade computacional, recursos de hardware e tempo de execu¸c˜ao. A complexidade computacional ´e o n´umero de opera¸c˜oes relevantes que o algoritmo executa. Os recursos de hardware representa os tipos de circuitos utilizados para fazer tais opera¸c˜oes. O tempo de execu¸c˜ao ´e a velocidade em que esse algoritmo executa.
O m´etodo convencional de aquisi¸c˜ao, implementado em hardware, ´e bastante utilizado no mercado devido a sua facilidade e baixo custo de implementa¸c˜ao[Kaplan & Hegarty 2005][Tsui 2005]. O processo sequencial tradicional visa fazer a busca no dom´ınio do tempo. Esse algoritmo ´e simples e requer poucos recursos de hardware, no entanto, a complexidade computacional e o tempo de processamento s˜ao altos.
6 CAP´ITULO 2. ESTADO DA ARTE
Para melhorar a velocidade de aquisi¸c˜ao, van Nee & Coenen (1991) propuseram um algoritmo baseado na FFT. Este algoritmo busca de forma serial os sat´elites vis´ıveis e a frequˆencia da portadora, mas busca de forma paralela o in´ıcio do c´odigo CA. Tal algoritmo precisa de mais recursos de hardware, mas a complexidade e o tempo de aquisi¸c˜ao s˜ao menores [van Nee & Coenen 1991]. Receptores em hardware n˜ao utilizam este m´etodo, pois consome demasiados recursos de hardware. ´E sabido que um dos m´etodos mais eficientes para aquisi¸c˜ao do sinal ´e implementando a t´ec-nica r´apida de aquisi¸c˜ao paralela, no qual a fun¸c˜ao de correla¸c˜ao ´e feita utilizando a transformada r´apida de Fourier [Borre et al. 2007]. No entando, a taxa de amos-tragem dos receptores modernos podem estar na ordem dos 10-20 MHz dependendo da aplica¸c˜ao, o que leva a FFT a ter um processamento alto, aumentando assim o custo do receptor [Starzyk & Zhu 2001].
Dovis et al. (2008) propˆos em 2008 o m´etodo de compress˜ao de sinal, no qual uma transforma¸c˜ao simples no sinal recebido permitia a redu¸c˜ao do n´umero de amostras sem degradar o sinal. A complexidade computacional ´e 54% menor em rela¸c˜ao ao m´etodo da Transformada R´apida de Fourier (FFT), mas o tempo de aquisi¸c˜ao ´e piorado significativamente.
Tsui (2005) propˆos o m´etodo delay and multiplication tendo como estrat´egia eliminar da busca o componente de frequˆencia. Sem tal componente o algoritmo se reduz a uma dimens˜ao, restando apenas calcular o in´ıcio do c´odigo CA no sinal de entrada. Quando o in´ıcio do c´odigo CA ´e encontrado, a FFT ´e aplicada para calcular o componente de frequˆencia. Comparando a aquisi¸c˜ao utilizando a FFT e o m´etodo de compress˜ao de sinal, a complexidade computacional reduz 93% e 87%, respectivamente. No entanto, o algoritmo consome muito tempo e recursos computacionais para determinar os sat´elites vis´ıveis.
Lu et al. (2009) desenvolveu o m´etodo de elimina¸c˜ao no incremento na busca do doppler. A estrat´egia proposta por ele ´e uma convers˜ao do sinal para banda base em duas partes. O sinal ´e modulado na frequˆencia central e depois na frequˆencia com doppler, para depois serem multiplicados. Os resultado indicam que o m´etodo pode reduzir at´e 50% do tempo do algoritmo de aquisi¸c˜ao no dom´ınio do tempo.
Xiaowen et al. (2010) propˆos o m´etodo de m´ultiplos correlacionadores extendidos (XMC, do inglˆes: extended multiple correlator). O sinal em frequˆencia intermedi´aria (FI) de um GPS pode ser escrito como.
2.1. CONTRIBUI ¸C ˜OES RECENTES 7
A amplitude ´e representadas por a, c(t) ´e o c´odigo CA e sin(ωt +φ(t)) ´e a portadora. O sinal ´e decodificado no receptor com o c´odigo CA cloc = c(t−τ). O
XMC usa trˆes c´odigos CA locais para decodificar o sinal, no qual o c´odigo CA local ´e definido como:
cxmc =c(t−τ +τxmc) +c(t−τ) +c(t−τ −τxmc) (2.2)
Para sinal com pouco ru´ıdo, o XMC tem um ganho em rela¸c˜ao ao m´etodo conven-cional, mas para sinais com muito ru´ıdo ele tem um desempenho pior.
Patel & Shukla (2011) propˆos um m´etodo que explora a simetria do espectro do c´odigo C/A, reduzindo assim o n´umero de pontos usados na FFT para calcular correla¸c˜ao circular. Uma maior redu¸c˜ao do tempo de aquisi¸c˜ao tem sido conseguida por investigar espelhamento do espectro da FFT. Apenas metade do espectro ´e utili-zado. Os resultados das simula¸c˜oes mostram que o m´etodo proposto para receptores de GPS em software ´e capaz de executar a aquisi¸c˜ao de forma mais r´apida e confi´avel que o m´etodo da FFT convencional.
Li et al. (2011) propˆos um algoritmo de baixa complexidade para a aquisi¸c˜ao de sinais de GPS. O m´etodo de aquisi¸c˜ao ´e baseado na representa¸c˜ao esparsada do sinal e na escolha randˆomica do alinhamento do sinal. Essa abordagem ´e boa para sinais forte, mas o autor n˜ao comparou com outras estrat´egias al´em da convencional.
O que se tem notado nos trabalhos publicados recentemente ´e que h´a uma ten-dˆencia de uso do m´etodo convencional na implementa¸c˜ao em hardware. Em contra-partida, quando o receptor ´e feito em software, o m´etodo mais utilizado ´e a FFT associada com outras estrat´egias citadas acima.
Cap´ıtulo 3
GPS
O desenvolvimento de um receptor de GPS ´e uma tarefa que requer muitas etapas e detalhes. Este cap´ıtulo ir´a introduzir alguns conceitos b´asicos do GPS, mostrando ao leitor o funcionamento geral do receptor. Ap´os uma vis˜ao geral e hist´orica, ser˜ao apresentadas aplica¸c˜oes do GPS, a estrutura do sinal, os segmentos, o sistema CDMA e discutido sobre receptores por software. Para finalizar ser´a apresentado o m´etodo convencional de aquisi¸c˜ao de sinais.
3.1
Hist´
orico
O NAVSTAR/GPS (NAVigation System with Timing And Ranging/Global Po-sitioning System), mais conhecido apenas por GPS, ´e um sistema de navega¸c˜ao baseado em sat´elites desenvolvido pelo departamento de defesa norte americano em meados de 1970. Criado inicialmente para fins militares, o GPS tamb´em foi adaptado para o uso civil. Este sistema ´e constitu´ıdo basicamente por 32 sat´elite, sendo 24 sat´elites ativos que orbitam a terra e enviam informa¸c˜oes cont´ınuas para os receptores dos usu´arios. Cada sat´elite de GPS fornece informa¸c˜oes cont´ınuas de tempo e posi¸c˜ao em qualquer lugar do mundo e sob qualquer condi¸c˜ao de tempo [El-Rabbany 2006], para que o usu´ario atrav´es de um receptor, possa utilizar para fins de c´alculo de posi¸c˜ao, velocidade, navega¸c˜ao ou obter o hor´ario preciso de uma determinada regi˜ao. A posi¸c˜ao do usu´ario ´e baseada no c´alculo da distˆancia entre o receptor e diversos sat´elites na ´orbita da terra, multiplicando o tempo que o sinal gasta para viajar do sat´elite at´e o receptor pela velocidade da luz [Tsui 2005].
O GPS n˜ao ´e o ´unico sistema de posicionamento por sat´elite. Existem pelo menos outros trˆes sistemas de posicionamento por sat´elite, a saber, Glonass, BeiDou, Galileo. O GLONASS ´e um sistema Russo que vem sendo desenvolvido desde 1976, e assim como o GPS, concebido para fins militares. O BeiDou, composto somente
10 CAP´ITULO 3. GPS
por trˆes sat´elites, ´e uma alternativa chinesa oferecendo servi¸co de navega¸c˜ao apenas para clientes da China e arredores. O Galileo ´e a solu¸c˜ao europeia que possui quatro sat´elite e come¸cou a funcionar em 2014.
3.2
Aplica¸
c˜
oes do GPS
Embora tenha sido originalmente criado como projeto militar, o GPS ´e consi-derado uma tecnologia de dupla utiliza¸c˜ao, o que significa que aplica¸c˜oes civis e militares podem usufruir dele.
O GPS se tornou uma ferramenta amplamente utilizada e ´util para o com´ercio, uso cient´ıfico, monitoramento e vigilˆancia. O GPS fornece informa¸c˜oes precisas sobre hor´ario que facilita atividades di´arias tais como servi¸cos banc´arios, controle de redes de energia e at´e mesmo o opera¸c˜oes de telefonia m´ovel permitindo a comuta¸c˜ao hand-off (quando telefones celulares trocam de c´elulas) bem sincronizadas.
Al´em de sua aplica¸c˜ao na avia¸c˜ao geral e comercial e na navega¸c˜ao mar´ıtima, qualquer pessoa que queira saber a sua posi¸c˜ao, encontrar o seu caminho para de-terminado local (ou de volta ao ponto de partida), conhecer a velocidade e dire¸c˜ao do seu deslocamento pode-se beneficiar com o sistema. Atualmente o sistema est´a sendo muito difundido em autom´oveis com sistema de navega¸c˜ao de mapas, que possibilita uma vis˜ao geral da ´area que vocˆe est´a percorrendo. O GPS tem grande importˆancia na ´area espacial. ´E uma pe¸ca fundamenta para a localiza¸c˜ao da carga ´
util do foguete ap´os o seu lan¸camento.
Outros usos do GPS:
• Setor de servi¸cos p´ublicos e ind´ustrias
• GPS para a silvicultura e os recursos naturais • GPS para agricultura
• GPS para mapeamento s´ısmicos • GPS para engenharia civil • GPS para mapeamento a´ereo
3.3. FUNDAMENTOS 11
3.3
Fundamentos
O princ´ıpio b´asico de funcionamento do GPS ´e a trilatera¸c˜ao. O receptor fica na superf´ıcie de uma esfera que tem no centro um sat´elite. O raio desta esfera ´e a distˆancia entre o receptor e o sat´elite. Para apenas um sat´elite, o usu´ario pode estar em qualquer posi¸c˜ao ao redor desta esfera, ent˜ao s˜ao necess´arios pelo menos trˆes sat´elites para elimiar a ambiguidade. Com trˆes sat´elites ainda haver´a duas posi¸c˜oes poss´ıveis, mas uma estar´a muito distante da terra e poder´a ser descartada. No entanto, com apenas trˆes sat´elites a posi¸c˜ao tem um erro muito grande, sendo preciso um quarto sat´elite para corrigir esse erro. Maiores detalhes do funcionamento do GPS pode ser visto em [Kaplan & Hegarty 2005][Tsui 2005]. Quando outros sat´elites s˜ao adicionados ao c´alculo a posi¸c˜ao fica melhor. Cada sat´elite tem uma posi¸c˜ao associada (xi, yi, zi), que ser´a utilizada para calcular a coordenada (x,y,z) do
receptor. Basicamente duas informa¸c˜oes s˜ao necess´arias para se calcular a posi¸c˜ao de um objeto: a distˆancia para cada sat´elite (pseudorange) e a posi¸c˜ao de cada sat´elite no espa¸co (ephemerides).
O c´alculo da distˆancia entre o receptor e cada sat´elite ´e feito baseado na diferen¸ca de tempo entre o envio e o recebimento do sinal. O sat´elite tem um rel´ogio atˆomico que deve estar sincronizado com o rel´ogio do receptor para o c´alculo da distˆancia sem erro relevante. A diferen¸ca ∆t de tempo ´e multiplicada pela velocidade de propaga¸c˜ao c do sinal. O valor de c ´e referente `a velocidade da luz. Ent˜ao, a velocidade da luz multiplicada pelo tempo que o sinal levou para percorrer o espa¸co entre o sat´elite e o receptor ´e igual ao deslocamento, ou seja, ´e a distˆancia entre o sat´elite e o receptor. A f´ormula pode ser vista na Equa¸c˜ao (3.1).
d= ∆t∗c (3.1)
Para o c´alculo de posi¸c˜ao do usu´ario, a f´ormula (3.1) deve ser aplicada a no m´ınimo 4 sat´elites. Quanto maior o n´umero de sat´elites melhor a precis˜ao, sendo poss´ıvel utilizar mais de quatro sat´elites. No entanto, onze ´e o n´umero m´aximo de sat´elites que podem ser vistos simultaneamente por cada receptor devido a geometria da terra e a abertura da antena [Tsui 2005]. Receptores multi-constela¸c˜ao, que utilizam outros sistemas de navega¸c˜ao, podem detectar um n´umero bem maior de sat´elites simultaneamente.
A Figura 3.1 ilustra o funcionamento b´asico do GPS.
12 CAP´ITULO 3. GPS
Figura 3.1: Representa¸c˜ao das distˆancia entre receptor e 4 sat´elites. Duas infor-ma¸c˜oes est˜ao representadas nesta imagem, a posi¸c˜ao de cada sat´elite e a distˆancia entre cada sat´elite e o receptor. Essas informa¸c˜oes s˜ao necess´arias para o c´alculo da posi¸c˜ao do usu´ario.
[Kaplan & Hegarty 2005],[El-Rabbany 2006],[Tsui 2005].
3.3.1
Segmentos
O sistema de GPS ´e composto por trˆes segmentos:
• Espacial • Controle • Usu´ario
O segmento espacial ´e composto pela constela¸c˜ao dos 24 sat´elites ativos que est˜ao em orbita. Apesar de poder funcionar com at´e 32 sat´elite, o GPS atualmente conta com 24 sat´elites que cobrem todo o globo terrestre, alguns sat´elites est˜ao desativados. O segmento de controle ´e composto por cinco esta¸c˜oes de controle distantes em longitude ao redor da terra. Dentre as cinco, a unidade de controle master ´e localizada na Falcon Air Force Base, no Colorado-EUA. A fun¸c˜ao dessas esta¸c˜oes ´e monitorar a performance do sistema de GPS, gerar e informar para os sat´elites os dados de navega¸c˜ao, detectar falha nos sat´elites, etc. Por fim, temos o segmento de usu´ario, que s˜ao os receptores utilizados pelos usu´arios do sistema.
3.3.2
Como um receptor funciona
3.3. FUNDAMENTOS 13
Frequˆencia), o sinal ´e convertido para uma frequˆencia intermedi´aria (FI), para pos-teriormente um circuito converter o sinal de anal´ogico para digital. Essa primeira etapa ´e feita em hardware.
Depois de digitalizado o sinal pode ser processado em software, sendo esta a abordagem deste trabalho. A primeira etapa em software ´e a aquisi¸c˜ao do sinal, que implica em encontrar um certo sat´elite que est´a vis´ıvel pela antena. A fase de Tracking objetiva manter o sinal de rastreamento sempre `a vista. Uma analogia da diferen¸ca entre a aquisi¸c˜ao do sinal e Tracking pode ser comparado ao resgate de v´ıtimas de um navio naufragado cuja localiza¸c˜ao n˜ao ´e conhecida com precis˜ao. A primeira etapa da tentativa de resgate envolve normalmente um avi˜ao voar com certo padr˜ao na ´area do naufr´agio. Por duas raz˜oes principais, observadores a bordo do avi˜ao podem ter dificuldade em encontrar uma pessoa numa vasta extens˜ao de oceano. Primeiro porque o olho humano ´e mais sens´ıvel a regi˜oes pequenas, mas o observador dever´a buscar numa ampla ´area para localizar o que parece ser uma pequena mancha na superf´ıcie do oceano. Em segundo lugar, a detec¸c˜ao de uma figura humana pode ser muito dif´ıcil entre in´umeros destro¸cos espalhados pelo vento em um mar agitado. O processo de busca de uma pessoa no mar ´e an´aloga `a pes-quisa necess´aria para a aquisi¸c˜ao de um sinal do GNSS. Uma vez que a v´ıtima est´a localizada (adquirida), os observadores devem manter a pessoa `a vista (rastreados) por algum per´ıodo de tempo durante as opera¸c˜oes de resgate. O processo de mo-nitoramento ´e geralmente muito mais f´acil do que a aquisi¸c˜ao, como o observador sabe agora com bastante precis˜ao onde a pessoa se encontra.
As etapas seguintes tratam de decodificar os bits enviados pelo sat´elite para ex-trair informa¸c˜oes a respeito de posi¸c˜ao dos sat´elites, tempo, etc. Por fim ´e calculada a posi¸c˜ao do usu´ario.
A etapa de aquisi¸c˜ao, que ´e o foco deste trabalho, precisa identificar os sat´elites vis´ıveis. Ent˜ao, o receptor precisa gerar um sinal local com as mesmas caracter´ısticas do sinal enviado pelo sat´elite. De posse destes dois sinais, original e r´eplica, o receptor verifica o grau de similaridade entre eles. Se a similaridade ultrapassar um certo valor, o sinal ´e adquirido e enviado para a fase de tracking.
14 CAP´ITULO 3. GPS
Figura 3.2: Estrutura b´asica de um receptor GPS. A primeira etapa aborda a re-cep¸c˜ao e digitaliza¸c˜ao do sinal numa frequˆencia intermedi´aria feitos em hardware. A segunda parte ´e o processamento do sinal em banda base realizada em software. Fonte: [Tsui 2005]
e demanda muito tempo.
Em rela¸c˜ao ao c´odigo, h´a 32 possibilidades que representam os sat´elites que est˜ao em ´orbita. Na dimens˜ao da fase, na qual ser´a preciso identificar a fase inicial do sinal, h´a 1023 possibilidades. A ultima dimens˜ao ´e a frequˆencia, o receptor deve corrigir imprecis˜oes devido ao efeito Doppler ocasionado pela movimenta¸c˜ao do sat´elite e do receptor, isso pode gerar no m´ınimo 20 diferentes frequˆencias, mas esse valor pode ser bem maior dependendo do tipo de movimenta¸c˜ao que o receptor sofre.
Quando se tem armazenado no receptor informa¸c˜oes a respeito dos sat´elite vis´ı-veis, a busca pode ajustar os parˆametros e ocorrer de forma mais r´apida. A estrat´egia ´e come¸car com uma frequˆencia baseada na posi¸c˜ao aproximada baseado na ´ultima posi¸c˜ao conhecida, ou tamb´em onde est˜ao os sat´elites, sua velocidade aparente (com base no dados armazenados na mem´oria receptor), no erro do rel´ogio (com base no ´
ultimo erro conhecido e na temperatura atual). Depois de estimar a frequˆencia, o receptor tenta agora encontrar a fase do sinal entre 1023 poss´ıveis fases do c´odigo pseudo-aleat´orio. Caso encontre, ele ir´a iniciar uma busca mais fina. Se n˜ao houver uma combina¸c˜ao de c´odigo e frequˆencia, implica que o sat´elite n˜ao est´a vis´ıvel e uma nova busca deve ser feita para outro sat´elite.
Quando n˜ao h´a nenhuma informa¸c˜ao pr´evia que possa agilizar a busca, o receptor precisar´a fazer uma busca em todos os sat´elites da ´orbita, chamada de busca fria.
3.4. GPS POR SOFTWARE 15
bits enviados numa taxa de 50 bits por segundo, tendo portanto 30 segundos. A maioria dos receptores exige a c´opia completa e ininterrupta do bloco de 1500 bits para decodificar as informa¸c˜oes. O sinal completo de GPS precisa de 12.5 minutos para ser transmitido.
Para obter uma posi¸c˜ao em trˆes dimens˜oes ´e preciso dados de no m´ınimo 4 sat´elites. Ap´os os 4 primeiros serem encontrados, o receptor ter´a informa¸c˜oes sobre frequˆencia e fase, podendo utilizar para uma busca mais r´apida de outros sat´elites.
No modo de aquisi¸c˜ao fria os receptores n˜ao contam com dados pr´evios, por isso come¸cam a procurar por cada sat´elite do 1o
at´e o 32o
sat´elite tentando encontrar os 4 primeiros sat´elites.
Este trabalho foca na etapa de aquisi¸c˜ao, informa¸c˜oes detalhadas de como o receptor funciona pode ser encontrada em [Kaplan & Hegarty 2005][El-Rabbany 2006][Tsui 2005].
3.4
GPS por software
Atualmente muitos receptores s˜ao implementados em hardware, mas devido a evolu¸c˜ao das tecnologias de processamento digital de sinais, a aquisi¸c˜ao e processa-mento de sinais de GPS tem sido amplamente realizada por meio de software [Hu & Fang 2009]. Comparado com o receptor por hardware, o receptor por software tem vantagens como a possibilidade de se testar novos algoritmos, facilidade de modificar os j´a existentes ou validar um novo sem muito custo. Devido a estas vantagens, o GPS por software tem se difundido entre pesquisadores da ´area.
As duas primeiras etapas ainda continuam em hardware, mas a parte de pro-cessamento em frequˆencia intermedi´aria vem sendo amplamente feita em software como por exemplo em [Patel & Shukla 2011][Tsui 2005][Starzyk & Zhu 2001][Borre et al. 2007][Dovis et al. 2008][Hu & Fang 2009].
3.5
Sinal de GPS
16 CAP´ITULO 3. GPS
assim em sistemas CDMA para serem diferenciados dos bits de dados que tamb´em fazem parte do sinal. Estes c´odigos s˜ao tamb´em conhecidos como pseudo-aleat´orios (PRN, do inglˆes: Pseudo random noise) por parecerem com sinais aleat´orios.
O c´odigo C/A ´e o sinal disponibilizado para o uso civil e o c´odigo P ´e restrito a uso militar pelos Estados Unidos. Al´em disso, o c´odigo P n˜ao ´e transmitido diretamente pelo sat´elite, ele sofre a influˆencia de um c´odigo (Y) o que leva a ser chamado em alguns casos de c´odigo P(Y). Nesse trabalho n˜ao ser´a abordado o c´odigo P, pois o mesmo ´e restrito para uso militar.
O c´odigo ´e uma sequˆencia de 1023 chips que se repete a cada milissegundo, o que significa que ele ´e transmitido em uma taxa de 1.023 MHz. A dura¸c˜ao de um c´odigo C/A ´e de 1ms, ou 300 metros [El-Rabbany 2006]. Cada sat´elite possui um c´odigo C/A associado, o que permite o receptor identificar qual sat´elite est´a transmitindo. O c´odigo C/A ´e transmitido num taxa de 50bps, em cinco subframes de 300 bits. A transmiss˜ao dos 37.500 bits da mensagem de navega¸c˜ao leva ao menos 12.5 minutos. Atrav´es dessa sequˆencia de bits pode-se extrair informa¸c˜oes a respeito da sa´ude do sat´elite, das coordenadas de posi¸c˜ao, parˆametros de corre¸c˜ao de rel´ogio, dados de efem´erides, almanaque e o n´umero da semana [Kaplan & Hegarty 2005]. Na Figura 3.3 podemos ver como s˜ao gerados os sinais L1 e L2. S˜ao trˆes informa¸c˜oes importantes para se gerar o sinal antes da transmiss˜ao. A portadora, o c´odigo CA do sat´elite que est´a transmitindo e os dados de navega¸c˜ao. N˜ao trataremos do c´odigo P, mas perceba que ele pode ser transmitido tanto em L1 quanto em L2. Cada sat´elite transmite a sua pr´opria mensagem de navega¸c˜ao [El-Rabbany 2006]
3.5.1
Gera¸
c˜
ao do c´
odigo CA
O c´odigo CA ´e da fam´ılia dos Gold Codes. Cada sat´elite tem um c´odigo associado que ´e resultado da opera¸c˜ao ou-exclusivo entre dois registradores de deslo-camento de tamanho dez, G1 e G2 como pode ser visto na 3.4. O tamanho m´aximo do c´odigo CA ´e dado em fun¸c˜ao do tamanho do registrador de deslocamento, sendo igual a 2n
−1, no qual n ´e o tamanho dos registradores. O sistema de GPS utiliza registradores de tamanho 10, logo 210
−1 = 1023 chips.
3.5.2
CDMA
3.5. SINAL DE GPS 17
Figura 3.3: Digrama de Gera¸c˜ao de Sinal. As sa´ıdas deste diagrama de modula¸c˜ao ´e composta pelos sinais L1 e L2. O sinal L1 ´e a jun¸c˜ao de uma portadora na frequˆencia de 1575.42MHz com o c´odigo CA do sat´elite e tamb´em a mensagem de navega¸c˜ao. A modula¸c˜ao ´e feita em fase e o sinal obtido ´e BPSK.
18 CAP´ITULO 3. GPS
O CDMA ´e uma t´ecnica no qual os transmissores utilizam o espalhamento espectral ocupando todo o espectro quando transmitem.
Espalhamento espectral ´e uma t´ecnica que surgiu com fins militares nos anos de 1940 e 1950. Durante a segunda Gerra Mundial as comunica¸c˜oes precisavam ser feitas de modo que o oponente n˜ao conseguisse decodificar a mensagem caso a interceptasse. Para tanto foi utilizado o espalhamento de espectro, no qual somente o detentor do c´odigo poderia decodificar o sinal facilmente. Nesse modo de transmiss˜ao as informa¸c˜oes de interesse s˜ao espalhadas de forma a ocupar uma largura de banda de transmiss˜ao muito maior que o m´ınimo necess´ario para enviar as informa¸c˜oes. A propaga¸c˜ao ´e feita por meio de um c´odigo (PRN) independente dos dados. Na recep¸c˜ao o mesmo c´odigo ´e gerado localmente para recupera¸c˜ao dos dados [Pickholtz et al. 1982].
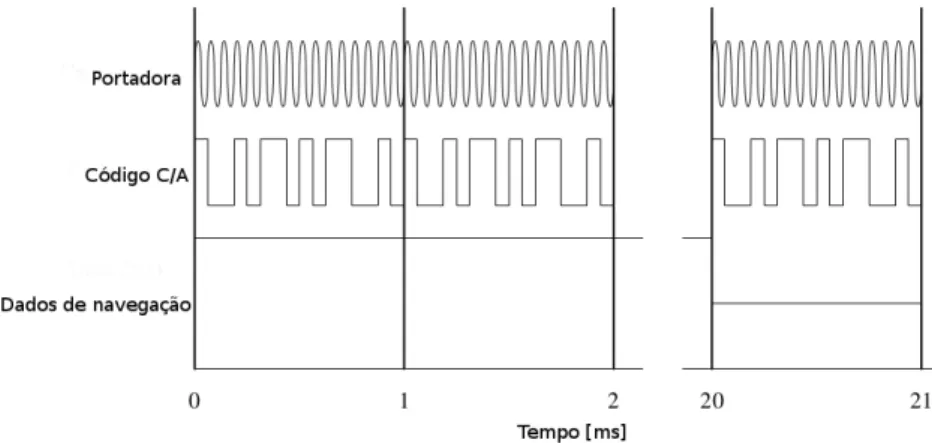
Nesse modo de transmiss˜ao tem-se duas informa¸c˜oes b´asicas: o dado e o c´odigo PRN. Os dados s˜ao multiplicados pelo PRN para fazer a codifica¸c˜ao. Por exemplos, no GPS cada sat´elite tem um c´odigo PRN (c´odigo CA) espec´ıfico de 1023 chips (valores -1’s ou 1’s). Se desejarmos transmitir os dados (bits) 01 precisaremos de 20 C/A codes para cada bit, ou seja, um bit de informa¸c˜ao ´e espalhado sobre 20 c´odigos C/As. Os mesmos c´odigos que carregam o bit 0 ´e replicado para carregar o bit 1. Vejamos na Figura 3.5, que o dado (bit) a ser transmitido ´e uma sequˆencia n˜ao peri´odica, j´a o PRN se repete a cada milisengundo.
3.6. AQUISI ¸C ˜AO DE SINAL 19
3.6
Aquisi¸
c˜
ao de sinal
O processo de aquisi¸c˜ao do sinal de GPS consiste em determinar quais sat´elites est˜ao vis´ıveis no espa¸co, a fase do c´odigo C/A e a frequˆencia da portadora. Muitos receptores utilizam a abordagem convencional pois ´e menos custosa em recursos de hardware e mais f´acil de ser implementada [Zhu et al. 2011]. Todavia, essa abordagem ´e mais lenta que as demais.
A frequˆencia nominal L1=1575.42MHz inicialmente ´e atenuada para uma frequˆen-cia intermedi´aria (FI) por quest˜oes relacionada ao custos de se trabalhar com altas frequˆencias. Al´em disso, ´e preciso considerar o deslocamento de frequˆencia ocasi-onado pela movimenta¸c˜ao dos sat´elites e do receptor. A frequˆencia esperada sofre um deslocamento devido ao Efeito Doppler. Esse deslocamento precisa ser calculado para se descobrir o valor da frequˆencia do sinal recebido. O processo consiste em aumentar o espa¸co de busca, ou seja, ao inv´es de buscar somente pela frequˆencia FI esperada, o procedimento precisa buscar pelas frequˆencias que est˜ao em um inter-valo que tem como centro a frequˆencia FI esperada. Esse interinter-valo ´e definido pelo tipo de movimenta¸c˜ao sofrida pelo receptor, ou seja, depende da aplica¸c˜ao. A outra informa¸c˜ao buscada pela aquisi¸c˜ao ´e a fase do sinal, que indica o exato ponto no sinal onde o c´odigo C/A come¸ca.
A maioria da t´ecnicas de aquisi¸c˜ao exploram a pseudo-ortogonalidade dos sinais de GPS devivo a propriedade de correla¸c˜ao do c´odigo C/A. O sinalsrecebido consiste da combina¸c˜ao de todos osn sat´elites vis´ıveis:
s(t) =s1
(t) +s2
(t) +...+sn
(t) (3.2)
Quando o receptor est´a fazendo a aquisi¸c˜ao de um sat´elitek, o sinal de entradas ´e multiplicado pelo c´odigo C/A do sat´elitek gerado localmente. As propriedades de correla¸c˜ao cruzada entre c´odigos C/As de diferentes sat´elites faz com que os dados de sat´elites diferentes de k sejam anulados. No entanto, ´e preciso que o c´odigo C/A de k esteja 100% alinhado com o c´odigo C/A do sinals. Quando o c´odigo local se alinha com o c´odigo do sinals, dizemos que ele est´a alinhado em fase. O resultado da multiplica¸c˜ao do sinalspelo c´odigo C/A dek ´e a remo¸c˜ao de todos sinais diferentes dek em s.
20 CAP´ITULO 3. GPS
ser maior ou menor. Para aplica¸c˜oes onde h´a alta dinˆamica, o deslocamento de frequˆencia ´e maior. O contr´ario tamb´em ´e verdadeiro. Para a maioria das aplica¸c˜ao, o intervalo fica em torno de±10KHz, mas pode chegar a±50KHz[Peng et al. 2011]. A sequˆencia das opera¸c˜oes iniciais do receptor GPS depende de seu projeto e de seu hist´orico operacional. Quando o receptor ´e ligado pela primeira vez ou sofre grandes deslocamentos, ´e preciso fazer o download de informa¸coes a respeito dos satelites de GPS que est˜ao localizados naquela regi˜ao ou na nova regi˜ao para onde foi deslocado. Essas informa¸coes ajudam no c´alculo da posi¸c˜ao e s˜ao chamadas de almanaque. Por esse motivo as primeiras buscas em um GPS novo ´e sempre demorada. Quando o almanaque est´a atualizado, o receptor sabe quais sat´elites est˜ao vis´ıveis. Para determinar quais sat´elites ser˜ao escolhidos s˜ao necess´arias trˆes informa¸c˜oes: (1) o almanaque; (2) uma estimativa grosseira da posi¸c˜ao do usu´ario e sua velocidade; e (3) uma estimativa do hor´ario do usu´ario. Se qualquer um desses parˆametros estiver em falta ou obsoleto, o receptor n˜ao ter´a escolhas e precisar´a realizar uma busca fria, ou seja, buscar por todos os sat´elites poss´ıveis. No entanto, se todos os dados estiverem dispon´ıveis o receptor poder´a, usando a posi¸c˜ao do usu´ario, a estimativa de hor´ario e o almanaque, determinar os sat´elites vis´ıveis para fazer uma busca direcionada bem mais veloz [Kaplan & Hegarty 2005].
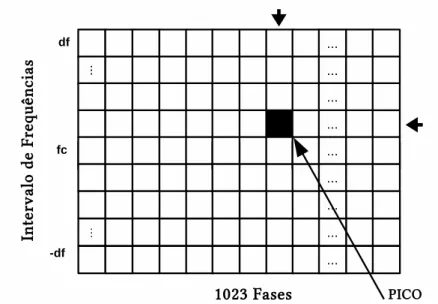
A Figura 3.6 mostra a matriz de busca que indica a dimens˜ao de frequ?ncia e a dimens˜ao de fase que o algoritmo precisa precorrer. Cada c´elula representa o sinal numa fase e frequˆencias espec´ıficas.
3.6.1
Aquisi¸
c˜
ao convencional
A acquisi¸c˜ao convencional, que ´e realizada de forma serial no dom´ınio do tempo, ´e amplamente utilizada sistemas de m´ultiplo acesso por divis˜ao de c´odigo (CDMA, do inglˆes: Code Division Multiple Access) [Borre et al. 2007]. O GPS ´e um sistema CDMA. O algoritmo de busca convencional procura por sat´elites de forma sequencial no dom´ınio do tempo deslocando o sinal gerado localmente pelo sinal recebido pelo receptor [Wu & Hu 2008]. Os valores citados nesta se¸c˜ao s˜ao referentes a um sinal espec´ıfico amostrado em 11.999MHz e a um Doppler considerado de 10KHz.
3.6. AQUISI ¸C ˜AO DE SINAL 21
Figura 3.6: Matriz de busca. Esta Figura representa o espa¸co de busca de um sat´e-lite. Na dimens˜ao do Doppler h´a inicialmente, na posi¸c˜ao fc, a frequˆencia central.
Acima e abaixo dessa posi¸c˜ao est´a representado o poss´ıvel deslocamento de frequˆen-cia de df KHz. Na outra dimens˜ao est˜ao representadas as 1023 diferentes fases que o sinal pode assumir. Se o sinal buscado estiver presente no sinal recebido, essa fase deve ser alinhada para que haja um pico de correla¸c˜ao.
o deslocamente de frequˆencia pode ser de ±50KHz [Peng et al. 2011]. Todo o processo ´e feito atrav´es de multiplica¸c˜oes e adi¸c˜oes, por isso ´e amplamente utilizado na ind´ustria por ser de f´acil implementa¸c˜ao e baixo custo, no entanto tem um alto consumo de tempo.
Perceba na Figura 3.7 que inicialmente o sinal de entrada s ´e multiplicado por uma portadora e por um c´odigo C/A gerados localmente. O sinal de GPS ´e com-plexo e precisa ser dividido em componentes de fase e quadratura respectivamente I e Q. Em seguida, os componentes I/Q s˜ao integrados por 1ms, que ´e exatamente o tamanho do c´odigo C/A, e finalmente s˜ao elevados ao quadrado. O valor num´erico resultante do quadrado da integra¸c˜ao s˜ao somados resultando num ´unico valor nu-m´ericos. Este valor ´e o valor de correla¸c˜ao entre o sinal de entrada e o sinal gerado localmente. Se o valor de correla¸c˜ao for maior que um certo limiar, ´e dito que o sat´elite buscado est´a presente no sinal recebido. Quando o sinal ´e detectado implica que a fase e a frequˆencia est˜ao corretos. Essas duas informa¸c˜oes s˜ao passadas para a pr´oxima fase: rastreamento.
22 CAP´ITULO 3. GPS
Figura 3.7: Esquema de funcionamento do algoritmo convencional. O sinal recebido ´e dividido em fase e quadratura e cada componente e multiplicado pelo PRN bus-cado. O sinal resultante ´e acumulado na fase de integra¸c˜ao e elevado ao quadrado em seguida. Ao final o quadrado da acumula¸c˜ao dos dois componentes s˜ao somados. Se houver um pico nesta soma, o sinal foi detectado.
possibilidades. No caso da frequˆencia, pode haver varia¸c˜ao pois o passo depende da resolu¸c˜ao utilizada para iterar sobre o intervalo de deslocamento de frequˆencia que varias de acordo com a dinˆamica do ve´ıculo que est´a utilizando o receptor GPS. No processo de aquisi¸c˜ao convencional ´e utilizado um passo de 500Hz. O processo pode muito custoso. Cada c´odigo C/A possui 1023 fases e o doppler pode ser de at´e ±50KHz. Isso implica dizer que num pior caso o n´umero de correla¸c˜oes necess´arias pode chegar a:
1023∗(2∗50.000
3.6. AQUISI ¸C ˜AO DE SINAL 23
Cap´ıtulo 4
Detec¸
c˜
ao de Sinais de GPS em
Dois Passos
A estrat´egia de detec¸c˜ao de sinais de GPS desenvolvida neste trabalho ´e a aqui-si¸c˜ao em dois passos. Objetivando a detec¸c˜ao r´apida, o primeiro passo trata de uma busca grosseira, que n˜ao garante precis˜ao suficiente, sendo necess´ario um refi-namento a posteriori para eliminar os falsos positivos. O segundo passo trata desse refinamento que ir´a confirmar ou refutar as informa¸c˜oes do primeiro passo. A busca busca grosseira e a busca fina s˜ao detalhadas ao longo deste cap´ıtulo.
4.1
Aquisi¸
c˜
ao Direta em Dois Passos
O objetivo da aquisi¸c˜ao ´e detectar o sinal de um determinado sat´elite o mais cedo poss´ıvel. Nesse sentido, este trabalho adotou em um primeiro momento uma busca grosseira em todo o espa¸co de busca para identificar regi˜oes que provavelmente h´a um pico de correla¸c˜ao entre o sinal recebido e o sinal local. Esse pico indica que o sinal recebido e uma r´eplica local combinam em fase, frequˆencia e c´odigo. Ademais, as coordenadas do pico indicam a fase e a frequˆencia do sinal. Essas informa¸c˜oes que s˜ao necess´arias para as pr´oximas etapas do processo de localiza¸c˜ao.
A aquisi¸c˜ao direta em dois passos ´e composta por: busca grosseira e busca fina. O primeiro passo ´e a busca grosseira que pode ser dividido em trˆes estrat´egias de redu¸c˜ao do espa¸co de busca. Essas estrat´egias tem o objetivo de otimizar o tempo de execu¸c˜ao e a complexidade computacional sem aumentar a complexidade de hardware. No segundo passo a busca fina faz o refinamento dos resultados da busca grosseira para confirmar ou refutar o poss´ıvel pico. O objetivo ´e encontrar picos de correla¸c˜ao que indicam a detec¸c˜ao do sinal.
Todavia, o uso da estrat´egia de dois passos impossibilita a utiliza¸c˜ao do limiar de
26 CAP´ITULO 4. DETEC ¸C ˜AO DE SINAIS DE GPS EM DOIS PASSOS
correla¸c˜ao que ´e comumente utilizado para detectar a correla¸c˜ao de sinais. Portanto, foi necess´ario a cria¸c˜ao de um novo limiar de detec¸c˜ao. Nesse sentido, foi utilizado um limiar baseado na variˆancia normalizada dos maiores picos de correla¸c˜ao encontrados. Antes de entender o funcionamento da busca em dois passos ´e importante enten-der alguns procedimentos aplicados ao sinal. O tamanho do sinal necess´ario para fazer a correla¸c˜ao ´e correspondente a 1ms que representa 1023 chips, valores 1’s e -1’s. Depois de capturado, o sinal ´e superamostrado numa frequˆencia de amostragem f s e passa a ter n amostras. O processo de superamostragem gera para cada um dos 1023 chips do sinal recebido um sub-vetor com aproximadamente m amostras daquele chip. Suponha que 1ms de sinal tenha sido amostrado em 11.999 MHz. Este sinal se transfomar´a em um vetor de n = 11999 amostras. Perceba que n˜ao ´e poss´ıvel indexar o mesmo n´umero de amostras para cada um dos 1023 chips. Nesse sentido, alguns chips ter˜ao mais amostras que outros. Cada chip do sinal original com 1023 chips, ter´a aproximadamente m = n/1023 amostras. Vale ainda desta-car que a frequˆencia de amostragem f s n˜ao ´e fixa para todos os receptores e neste trabalho o valor de f s´e 11.999MHz. Os valores utilizados neste trabalho s˜ao:
f s= 11.999M Hz
f c= 3.56M Hz: Frequˆencia central do sinal recebido;
df =f c±doppler: Deslocamenteo de frequˆencia a partir da Frequˆencia central; n= 11999: Amostras;
v = 1023: Sub-vetores;
m=n/1023: N´umero de amostras para cada um dosv sub-vetores.
Para altas taxas de amostragem, a complexidade computacional aumenta con-sideravelmente. A complexidade computacional aqui considerada ´e o n´umero de opera¸c˜oes relevantes realizadas pelo algoritmo. Como o sinal de 1023 chips passou a ter 11999 amostras, o processamento ´e diretamente afetado pois apenas 1 amostra ´e processada por vez. Nesse sentido, ´e proposto um algoritmo de sub-amostragem que tenta recuperar o sinal original de 1023 chips utilizando um subconjunto das amostras.
4.1.1
A Busca Grosseira - Primeiro Passo
4.1. AQUISI ¸C ˜AO DIRETA EM DOIS PASSOS 27
a uma busca fina. O resultado da busca grosseira sempre servir´a como entrada para a busca fina de modo que um resultado grosseiro nunca ´e dado como correto sem antes passar pela busca fina. O ganho de velocidade da busca grosseira tem como principal estrat´egia a redu¸c˜ao de computa¸c˜oes redundantes e da redu¸c˜ao da precis˜ao de frequˆencia. Al´em disso, o tamanho do sinal utilizado tamb´em ´e reduzido.
4.1.2
As Quatro Dimens˜
oes da Busca
Computacionalmente o processo de aquisi¸c˜ao implementado pode ser entendido numa perspectiva de uma busca em quatro dimens˜oes, das quais trˆes podem ser reduzidas na busca grosseira. As duas primeiras dimens˜oes est˜ao relacionadas `a fase e a frequˆencia. Inicialmente o sinal recebido e sua r´eplica local presente no receptor n˜ao necessariamente est˜ao alinhados em fase. O algoritmo precisa alinhar o sinal recebido `a fase correta que ainda e desconhecida. Al´em da fase, a frequˆencia tamb´em precisa ser determinada, pois o sinal recebido sofre altera¸c˜oes devido ao Efeito Dop-pler. Ent˜ao, a segunda dimens˜ao visa encontrar a frequˆencia do sinal dentro de um intervalo de poss´ıveis frequˆencias. A terceira dimens˜ao ´e o passo de sub-amostragem do sinal. O sinal enviado pelo sat´elite ´e composto por uma sequˆencia de c´odigos CA’s enfileirados um atr´as do outro com repeti¸c˜ao a cada milissegundo. Quando chega ao receptor, 1ms (1023 chips) do sinal ´e capturado e superamostrado pelo circuito de convers˜ao Anal´ogico/Digital numa frequˆencia de amostragemfsdeterminada por cada receptor, levando os 1023 chips para n amostras. Para cada chip s˜ao criadas aproximadamente m = n/1023 amostras, como ´e ilustrado na Figura 4.1. Para determinar a correla¸c˜ao, um la¸co de repeti¸c˜ao realiza opera¸c˜oes matem´aticas sobre essas amostras. Entretanto, para reduzir o processamento, ´e proposto sub-amostrar o sinal com inten¸c˜ao de se recuperar os 1023 chips originais mais rapidamente.
28 CAP´ITULO 4. DETEC ¸C ˜AO DE SINAIS DE GPS EM DOIS PASSOS
Figura 4.1: Exemplo de amostragem de um c´odigo CA. A amostragem de um chip ´e apresentada com um zoom. A estrat´egia de recupera¸c˜ao do sinal original a partir do sinal amostrado, implica em recuperar uma amostra em cada m. O sinal completo tem n/1023 sub-vetores de amostragem de tamanho m.
pare sem ter que contabilizar todas as amostras do sinal, pois provavelmente ter´a um pico naquela regi˜ao. As sub-se¸c˜oes a seguir detalham as dimens˜oes de busca que sofrem redu¸c˜ao.
Redu¸c˜ao na Dimens˜ao da Frequˆencia
Nessa dimens˜ao, o intervalo total de busca ´e definido pela dinˆamica (movimento) do receptor utilizado. Para cada tipo de dinˆamica, um intervalo de frequˆencia ´e considerado. A depender da dinˆamica do receptor, o intervalo pode ser maior ou menor. O ideal seria receber o sinal na frequˆencia central esperada fc, mas como
h´a movimenta¸c˜ao tanto do receptor quanto do sat´elite, o sinal ´e afetado pelo Efeito Doppler. O algoritmo precisa cobrir um intervalo de ±df a partir da frequˆencia central fc. O que determina quantos componentes de frequˆencia ser˜ao utilizados
ser´a a vari´avel de resolu¸c˜ao de frequˆencia dfr. Com resolu¸c˜ao de dfr = 500Hz, para
cobrir todas as frequˆencias a partir de fc em um intervalo de ±df ser˜ao necess´arios
2∗df /dfr+ 1 componentes de frequˆencia a serem verificados.
Considere o seguinte exemplo: df = 10KHz e dfr = 500Hz
Componentes de frequencia = 2∗ 10.000
500 + 1 = 41 (4.1)
Agora se diminuir a resolu¸c˜ao (aumentar dfr) : df = 10KHz edfr = 1000Hz
Componentes de frequencia = 2∗ 10.000
4.1. AQUISI ¸C ˜AO DIRETA EM DOIS PASSOS 29
Para a busca grosseira, ao inv´es de saltos ideais de resolu¸c˜aodfr, ela ter´a valores
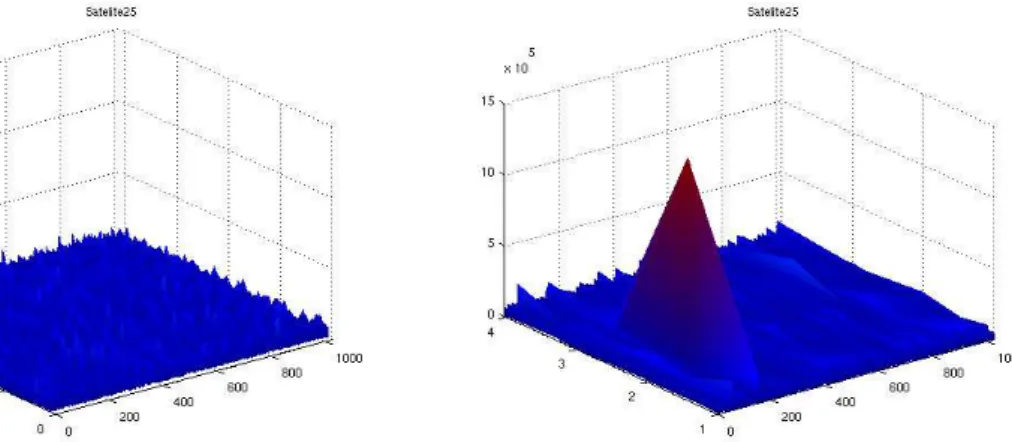
maiores (menor resolu¸c˜ao) para que menor n´umero de componentes de frequˆencia sejam utilizados no intervalo. Aumentar o passo de frequˆencia implica em utilizar menos componentes dentro do intervalo ±df. O mesmo intervalo ´e coberto, mas apenas alguns componentes de frequˆencia s˜ao utilizados. O resultado ´e uma busca na frequˆencia com pouca precis˜ao, que pode ser visto na Figura 4.2. A Figura 4.2(a) indica a busca com resolu¸c˜ao fina e a Figura 4.2(b) indica a busca com resolu¸c˜ao grosseira. Ainda na Figura 4.2(b) ´e poss´ıvel verificar que a frequˆencia identificada tem uma resolu¸c˜ao muito baixa, pois apesar de ter coberto±df a partir da frequˆencia central, foram dados grandes saltos e a frequˆencia ideal provavelmente foi ignorada. Em contrapartida, essa busca grosseira identificou a poss´ıvel regi˜ao onde se encontra a frequˆencia desejada.
(a) Doppler m´aximo com amostragem m´axima (b) Doppler reduzido com amostragem m´axima
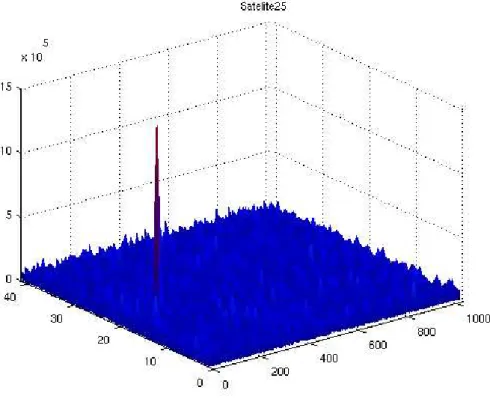
Figura 4.2: Compara¸c˜ao entre busca com boa resolu¸c˜ao de doppler m´aximo e com resolu¸c˜ao reduzida para o sat´elite 25 com amostragem m´axima. A parte (a) ´e a execu¸c˜ao com precis˜ao m´axima. A parte (b) tem resolu¸c˜ao grosseira na dimens˜ao de frequˆencia.
Redu¸c˜ao por sub-amostragem
sub-30 CAP´ITULO 4. DETEC ¸C ˜AO DE SINAIS DE GPS EM DOIS PASSOS
vetor, pois seria exatamente os 1023 chips do sinal original. No entanto, nem todos os sub-vetores tem o mesmo tamanho, dificultando a recupera¸c˜ao exata do sinal original devido a impossibilidade de saber onde come¸ca o pr´oximo sub-vetor. A falta de informa¸c˜ao em rela¸c˜ao ao tamanho exato do sub-vetor obriga a utiliza¸c˜ao de um salto que pode utilizar mais de uma amostra de cada sub-vetor em seguida. Por exemplo, se a primeira amostra do sub-vetor 1 for utilizada, a segunda amostra deveria ser a primeira do sub-vetor 2. No entanto, pode acontecer que a segunda amostra ainda seja do sub-vetor 1, o que implica em uma amostra repetida, ou seja, para o primeiro chip duas amostras est˜ao sendo consideradas. A Figura 4.4 pode ser visto uma ilustra¸cao de como o algoritmo utiliza as amostrados do sinal.
Redu¸c˜ao no Tamanho do Sinal Utilizado
possibilida-4.1. AQUISI ¸C ˜AO DIRETA EM DOIS PASSOS 31
des. Vale destacar que nem sempre h´a solu¸c˜ao, tanto para o algoritmo convencional quanto para o proposto.
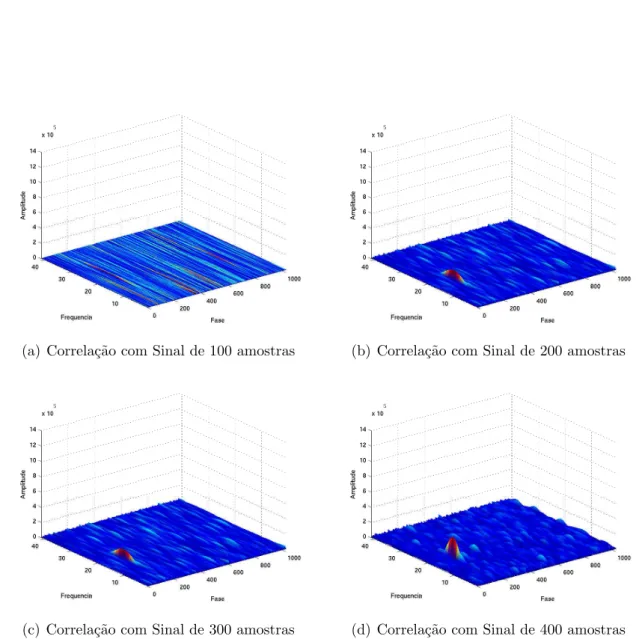
A Figura 4.3 mostra gr´aficos com diferentes tamanhos de sinal. Na Figura 4.3(a) foram utilizadas 100 amostras do sinal com aproximadamente 1023. A Figura 4.3(b) utilizou 200 amostras, a Figura 4.3(c) utilizou 300 e a Figura 4.3(d) utilizou 400 amostras. O que se pode perceber ´e que `a medida que o incremento de amostras avan¸ca, o pico de correla¸c˜ao aumenta. O algoritmo proposto explora essa proprie-dade para detectar mais cedo poss´ıveis regi˜oes de correla¸c˜ao. Ent˜ao, n˜ao se espera que todas as amostras sejam computadas para a identifica¸c˜ao do poss´ıvel pico. No momento que um pico come¸ca a aparecer, a etapa de refinamento ´e acionada para comprovar ou refutar os dados identificados. Esse refinamento implica na utiliza-¸c˜ao dos parˆametros m´aximos para atingir uma precis˜ao melhor. Esse refinamento ´e aplicado a apenas uma regi˜ao espec´ıfica da Figura 4.5.
Um problema gerado pela busca grosseira ´e a perda de generalidade do limiar de detec¸c˜ao. No m´etodo convencional o limiar pode ser facilmente estabelecido, pois o limiar de correla¸c˜ao do sinal ´e completamente calculado de uma s´o vez, para s´o ent˜ao ser verificado. Desse modo h´a uniformidade no tamanho do sinal, pois ele foi completamente verificado. Nesse sentido, o limiar pode ser fixo e ´unico.
No m´etodo proposto a busca grosseira n˜ao satisfaz estes crit´erios, dificultando a fixa¸c˜ao de um limiar ´unico e fixo. Cada sinal pode ter mais ou menos ru´ıdos, influenciando no valor dos picos de correla¸c˜ao. Al´em disso, o m´etodo proposto n˜ao fixa o tamanho m´ınimo do sinal a ser correlacionado. Um sinal pode ser detectado apenas com um percentual p de seu tamanho total, j´a outros precisam de valores maiores ou menores que p. Como o algoritmo ´e iterativo e a cada itera¸c˜ao no la¸co das amostras o limiar ´e verificado, pode ser que um sinal convirja com mais ou menos amostras em rela¸c˜ao a outros. O n´umero de amostras influenciam na amplitude do pico de correla¸c˜ao. A solu¸c˜ao encontrada para resolver o problema causado por um n´umero vari´avel de amostras foi a cria¸c˜ao de um limiar baseado na variˆancia normalizada dos maiores picos encontrados. Detalhes dessa proposta s˜ao apresentados na Se¸c˜ao 4.1.4.
4.1.3
A Busca Fina - Segundo Passo
32 CAP´ITULO 4. DETEC ¸C ˜AO DE SINAIS DE GPS EM DOIS PASSOS
executado somente em termo dessa regi˜ao espec´ıfica.
O refinamento de fase ´e direcionado a uma fase espec´ıfica, pois na busca grosseira o pico s´o ocorre na sua devida fase. O sinal de GPS tem propriedade de correla¸c˜ao no qual o pico s´o ocorre se o sinal estiver 100% alinhado, caso contr´ario o valor ser´a pr´oximo de zero. A frequˆencia por sua vez n˜ao apresenta essa propriedade. Na etapa grosseira, o pico pode ser atingido com frequˆencias pr´oximas `a real. Foi necess´ario fazer um refinamento com certa redundˆancia para garantir a frequˆencia ideal. A Figura 4.5 mostra a dimens˜ao de frequˆencia com c´elulas redundantes.
Existem dois limiares, o limiar grosseiro e o limiar fino. Por quest˜ao de simpli-cidade, o limiar fino tamb´em foi baseado na variˆancia. Neste caso, o limiar poderia ser o limiar convencional da correla¸c˜ao, pois o sinal foi completamente correlacio-nado sem redu¸c˜oes. No entanto, na implementa¸c˜ao foi escolhido manter o limiar de variˆancia. Eles funcionam da mesma maneira, atrav´es do c´alculo da variˆancia entre picos, mas o limiar fino ´e maior.
4.1.4
A Variˆ
ancia dos Picos de Correla¸
c˜
ao como Limiar de
Detec¸
c˜
ao
O limiar de detec¸c˜ao ´e uma pe¸ca fundamental deste trabalho, pois ´e quem de-termina quando o algoritmo passa da busca grosseira para a busca fina ou para. Sem uma medida que detectasse a baixa varia¸c˜ao relativa dos picos, as estrat´egias citadas anteriormente n˜ao fariam muito sentido. A utiliza¸c˜ao dessas estrat´egias, a saber, redu¸c˜ao da resolu¸c˜ao de frequˆencia, sub-amostragem e redu¸c˜ao do tamanho do sinal, resulta na diminui¸c˜ao da amplitude dos picos de correla¸c˜ao.
4.1. AQUISI ¸C ˜AO DIRETA EM DOIS PASSOS 33
picos na regi˜ao de satura¸c˜ao (azul) da Figura 4.6.
Ademais, no m´etodo convencional o sinal recebido e sua r´eplica local, ambos de tamanho n, s˜ao correlacionados de uma s´o vez. O resultado ´e o valor da correla¸c˜ao para o sinal do sat´elite s na frequˆencia x e fase y. Para cada c´elula da Figura 4.5 esses sinais de tamanho n s˜ao completamente correlacionados, diferente do m´etodo proposto que correlaciona apenas uma amostra a cada visita `a c´elula. Percebe-se ent˜ao que o algoritmo convencional fica limitado ao processamento completo do sinal para s´o depois fazer a compara¸c˜ao com o limiar. N˜ao h´a como tomar uma decis˜ao antes de todo o processo terminar. Se o pico estiver na ´ultima c´elula da matriz por exemplo, muito processamento in´util ter´a sido realizado at´e o pico ser encontrado. No algoritmo proposto, a busca grosseira est´a a todo momento fazendo a verifica¸c˜ao do limiar. Quando um pico muito pequeno come¸ca a se destacar, o limiar de correla¸c˜ao consegue detectar isso precocemente e chama o algoritmo de refinamento para verificar a confiabilididade do pico que come¸ca a surgir. Por´em, esses picos s˜ao t˜ao pequenos que podem ser falsos picos, ou seja, `a medida que mais amostras v˜ao vendo adicionadas, esse pico parar de crescer e o verdadeiro pico que est´a em outra regi˜ao se destaca.
Considerando que um dos objetivos principais do algoritmo proposto ´e fazer a detec¸c˜ao o mais cedo poss´ıvel, viu-se a necessidade de uma medida que consiga de-tectar a varia¸c˜ao at´e mesmo para picos com amplitudes muito pequenas. A variˆancia foi a solu¸c˜ao encontrada para defini¸c˜ao do limiar de detec¸c˜ao, pois ´e uma medida sens´ıvel a pequenas varia¸c˜oes. Com o seu uso at´e picos muito pequenos podem ser detectados.
Com o objetivo de detectar o pico de correla¸c˜ao o mais cedo poss´ıvel, o algoritmo proposto n˜ao realiza a correla¸c˜ao do sinal completo para cada c´elula da matriz de busca. No algoritmo convencional cada c´elula da matriz ´e visitada apenas uma vez. No algoritmo proposto cada c´elula ´e visitada v´arias vezes. A cada visita uma nova amostra do sinal ´e adicionada ao processo de correla¸c˜ao. A cada adi¸c˜ao de amostra, a amplitude dos picos vai sendo incrementada ao tempo que as regi˜oes que n˜ao apresentam picos saturam num valor bem baixo por conta das propriedades de pseudo-ortogonalidade do c´odigo C/A. Ent˜ao, a cada percurso completo na matriz o pico vai se sobressaindo com valores pequenos. O uso da variˆancia detecta a varia¸c˜ao cedo o suficiente para a aceita¸c˜ao do m´etodo proposto.
34 CAP´ITULO 4. DETEC ¸C ˜AO DE SINAIS DE GPS EM DOIS PASSOS
v˜ao sendo trocados caso o algoritmo encontre picos maiores que os cinco existentes. A variˆancia ´e calculada com valores entre 0 e 1, pois os picos s˜ao normalizado pelo pico de maior valor. Como pode ser visto na Figura 4.7, para valores entre 0 e 1, a variˆancia fica entre 0 e 0.5.
A variˆancia ´e a m´edia do quadrado da distˆancia de cada ponto at´e a m´edia, e
para dois valor ´e definida como:
σ
2=
1
2
"
pico
1
−
pico
1 +
pico
2
2
2+
pico
2
−
pico
1 +
pico
2
2
2#
(4.3)
Cada sinal ter´a um comportamento diferente, para alguns a busca converge mais rapidamente, para outros demoram mais. Esse comportamento implica em dizer que para cada sinal os valores de picos ter˜ao amplitudes relativas. A amplitude regi˜ao onde n˜ao h´a pico pode ser maior ou menor a depender do sinal, por isso a variˆancia foi bastante ´util para detectar varia¸c˜oes locais independente de sua amplitude.
4.1.5
Fluxograma e Pseudoc´
odigo
O pseudoc´odigo do algoritmo ´e apresentado em Listagem abaixo e uma mode-lagem mais alto n´ıvel foi feita em forma de fluxograma e pode ser vista na Figura 4.8.
1
2 for ( d = 0; d < passo ; d ++) {
3 for ( z = d ; z < n ; z = z + passo ) { // la¸co das a mo s t ra s
4 for ( x = 0; x < doppler ; x ++) // la¸co das f r e q u ^e n c i a s
5 {
6 for( y =0; y < fases ; y ++) { // la¸co das fases
7 // calcula pico de c o r r e l a ¸c ~a o
8 // A r ma z en a os 5 maiores picos
9 }
10 }
11
12 // fun¸c~ao r e p o n s ´a v e l por c a lc u la r a v a r i ^a n c i a
13 // dos 5 maiores picos e n c o n t r a d o s