Invariantes do tipo Vassiliev de aplicações estáveis
de 3-variedade em R
4Invariantes do tipo Vassiliev de aplicações estáveis de
3-variedade em R
4Catiana Casonatto
Orientadora:
Profa. Dra. Roberta Godoi Wik Atique
Co-orientadora:
Profa. Dra. María del Carmen Romero Fuster
Tese apresentada ao Instituto de Ciências Matemáticas e de Computação - ICMC-USP, como parte dos requisitos para obtenção do título de Doutor em Ciências - Matemática.
VERSÃO REVISADA.
USP
–
São Carlos
Agosto de 2011
SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP
Data de Depósito: 02/08/2011
com os dados fornecidos pelo(a) autor(a)
C341i
Casonatto, Catiana
Invariantes do tipo Vassiliev de aplicações estáveis de 3-variedade em R4 / Catiana Casonatto; orientadora Roberta Godoi Wik-Atique -- São Carlos, 2011.
114 p.
Tese (Doutorado - Programa de Pós-Graduação em Matemática) -- Instituto de Ciências Matemáticas e de Computação, Universidade de São Paulo, 2011.
i
Ao meu amado Jean, companheiro de todas as horas.
Agradecimentos
`
A Deus, simplesmente por tudo.
Com muita gratid˜ao, respeito e admira¸c˜ao, agrade¸co `as minhas orientadoras Roberta Godoi Wik Atique e Mar´ıa del Carmen Romero Fuster, pela significativa contribui¸c˜ao em minha inici-a¸c˜ao `a pesquisa matem´atica, pelo exemplo de profissionalismo e pela amizade.
Aos meus pais, Carlos e Marilene, por todo amor e apoio incondicional. Pelo exemplo de perseveran¸ca, determina¸c˜ao e car´ater.
`
A minha irm˜a e amiga Susi´eli, ao meu querido cunhado Ariel e ao meu amado sobrinho afilhado Joaquim por estarem ao meu lado em todos os momentos e fazerem os meus dias mais felizes.
Ao meu noivo, meu grande amor e companheiro, por estar sempre ao meu lado, me dando o exemplo, a for¸ca e a coragem que necessito para n˜ao desistir da luta di´aria de me tornar uma profissional e uma pessoa melhor.
Aos professores do Instituto de Ciˆencias Matem´aticas e Computa¸c˜ao (ICMC-USP) pelos valiosos ensinamentos, em especial, `a Professora Maria Aparecida Soares Ruas.
Aos professores, funcion´arios e alunos do departamento de Topolog´ıa y Geometr´ıa da Uni-versidad de Valencia pela calorosa acolhida.
Ao amigo Ra´ul, pelas divertidas e produtivas discuss˜oes matem´aticas.
Aos meus amigos que estiveram ao meu lado nesta caminhada, tornando tudo mais agrad´avel e divertido: Nazira Harb, Marcio Fenille, Tha´ıs Monis, Kleyber Cunha, Tha´ıs Jord˜ao, ´Eder Arag˜ao, Mario Henrique, Luiz Hartmann, Romero Melo, Thiago Catalan, Flank Bezerra, M´arcio Jorge.
Ao CNPq pelo apoio financeiro.
-resumo
Neste trabalho obtemos que o espa¸co dos invariantes locais do tipo Vassiliev de primeira ordem de aplica¸c˜oes est´aveis de 3-variedade fechada orientada em R4 ´e 4-dimensional. Damos
uma interpreta¸c˜ao geom´etrica para 2 dos 4 geradores deste espa¸co, a saber, IQ o n´umero de
pontos qu´adruplos e IC/P o n´umero de pares de pontos do tipo crosscap/plano, da imagem de uma aplica¸c˜ao est´avel. Ao reduzir o espa¸co das aplica¸c˜oes para o das imers˜oes est´aveis, obtemos que o espa¸co dos invariantes locais de imers˜oes est´aveis ´e 3-dimensional. Os invariantes que obtemos s˜ao: IQ o n´umero de pares de pontos qu´adruplos da imagem de uma imers˜ao est´avel e
dois ´ındices de interse¸c˜aoIℓ+ e Iℓ− introduzidos por V. Goryunov em [15].
Como in´ıcio de um estudo que almejamos realizar sobre a geometria de uma m-variedade emRm+1 com singularidades, obtemos os tipos de contatos gen´ericos da suspens˜ao do crosscap
(´unica singularidade est´avel deR3 emR4) com hiperplanos de R4.
-abstract
In this work we obtain that the space of first order local Vassiliev type invariants of stable maps of oriented 3-manifolds in R4 is 4-dimensional. We give a geometric interpretation for
two of the four generators of this space, namely, IQ the number of quadruple points and IC/P
the number of pairs of points of crosscap/plane type, of the image of a stable map. In the case of stable immersions, we obtain that the space of local invariants of stable immersions is 3-dimensional. The invariants that we obtain are: IQ the number of pairs of quadruple points
of the image of a stable immersion and the positive and negative linking invariantsIℓ+ and Iℓ−
introduced by V. Goryunov in [15].
As a beging of a study that we want to realise about the geometry of am-manifold inRm+1
with singularities, we obtain the generic contacts of the suspension of crosscap (the only stable singularity from R3 toR4) with hyperplanes ofR4.
-Conte´
udo
1 Classifica¸c˜ao de multigermes de R3 em R4 e de coposto 1 5
1.1 Teoria cl´assica de Singularidades . . . 6
1.1.1 Rela¸c˜oes de equivalˆencias e espa¸cos tangentes . . . 7
1.1.2 M´etodo de classifica¸c˜ao . . . 9
1.1.3 Desdobramentos versais . . . 11
1.1.4 Opera¸c˜oes de aumenta¸c˜ao e concatena¸c˜ao . . . 12
1.1.5 Suspens˜ao do crosscap . . . 14
1.2 Classifica¸c˜ao de bigermes . . . 14
1.3 Classifica¸c˜ao de trigermes . . . 26
1.4 Classifica¸c˜ao de quadrigermes, pentagermes e hexagermes . . . 32
2 Conjuntos de bifurca¸c˜ao dos germes de Ae-codimens˜ao2 40 2.1 Conjuntos de bifurca¸c˜ao dos monogermes . . . 42
2.2 Conjuntos de bifurca¸c˜ao dos bigermes . . . 48
2.3 Conjuntos de bifurca¸c˜ao de trigermes . . . 58
2.4 Conjuntos de bifurca¸c˜ao dos quadrigermes, pentagermes e hexagermes . . . 65
3 Invariantes locais do tipo Vassiliev de primeira ordem 73
-3.1 M´etodo de Vassiliev . . . 73
3.2 Invariantes de aplica¸c˜oes est´aveis de 3-variedades em R4 . . . . 76
3.2.1 Coorienta¸c˜ao dos estratos de codimens˜ao 1 . . . 77
3.2.2 Parti¸c˜ao dos estratos de codimens˜ao 1 . . . 83
3.2.3 Condi¸c˜oes de compatibilidade e geradores . . . 85
3.2.4 Invariante n˜ao local de aplica¸c˜ao est´avel . . . 98
3.3 Invariantes de imers˜oes est´aveis de 3-variedades em R4 . . . . 99
4 Fun¸c˜oes na suspens˜ao do crosscap 102 4.1 Transversalidade . . . 103
4.2 Geometria da suspens˜ao do crosscap . . . 103
Apˆendice 112 Apˆendice A: comandos dos programas Superf´ıcie I e Mathematica utilizados na visualiza¸c˜ao dos estratos de codimens˜ao 1 . . . 112
Introdu¸
c˜
ao
Na d´ecada de 60 J. Mather desenvolveu uma s´erie de trabalhos que contribuiram para o avan¸co de classifica¸c˜oes de singularidades. De particular relevˆancia podemos citar sua clas-sifica¸c˜ao de singularidades est´aveis obtida em [22]. Tal clasclas-sifica¸c˜ao foi realizada segundo a
A-equivalˆencia, isto ´e, mudan¸cas de coordenadas na fonte e na meta. A partir de ent˜ao se ini-ciou o estudo de singularidades menos frequentes (as singularidades n˜ao est´aveis) e classifica¸c˜oes foram sendo obtidas considerando-se pares espec´ıficos de dimens˜oes, singularidades de codimen-s˜ao e coposto baixos, singularidades simples, entre outras. Algumas classifica¸c˜oes conhecidas s˜ao:
(i) Singularidades simples de germes de fun¸c˜oes deRn emR, por V. I. Arnol’d em [2];
(ii) Singularidades simples de germes de aplica¸c˜oes deR2 em R3, por D. Mond em [23];
(iii) Singularidades simples de germes de aplica¸c˜oes de Kn emK2 (K =Rou K =C), por J.
H. Rieger e M. A. S. Ruas em [31];
(iv) Singularidades simples de germes de aplica¸c˜oes de R3 em R3, por W. L. Marar e F. Tari
em [21];
(v) Singularidades simples de germes de aplica¸c˜oes de R3 emR4, por K. Houston e Kirk em
[19];
(vi) Singularidades simples de multigermes de aplica¸c˜oes de C2 emC3, por R. G. Wik Atique
em [36].
Os resultados sobre classifica¸c˜ao de singularidades s˜ao aplicados em diversas situa¸c˜oes in-teressantes. Um exemplo disto ´e a teoria dos invariantes do tipo Vassiliev. No in´ıcio da d´ecada de 90, Vassiliev em [34] desenvolveu um m´etodo para definir invariantes num´ericos de n´os, hoje conhecidos comoinvariantes do tipo Vassiliev de ordem finita. Ele obteve estes invariantes estu-dando cuidadosamente uma certa parti¸c˜ao dosubconjunto discriminante Σ de C∞(S1,R3), isto
´e, o subconjunto deC∞(S1,R3) consistindo das aplica¸c˜oes n˜ao est´aveis. Desde ent˜ao este m´etodo
discriminante ´e particionado em v´arios estratos de codimens˜ao 1 e 2. J´a que estes invariantes s˜ao locais, esta parti¸c˜ao ´e feita de acordo com o tipo local de singularidade que as aplica¸c˜oes em Σ apresentam. ´E neste aspecto que a classifica¸c˜ao de germes de aplica¸c˜oes contribui para a obten¸c˜ao de invariantes do tipo Vassiliev. O objetivo inicial ´e determinar o n´umero de geradores do espa¸co dos invariantes de primeira ordem das aplica¸c˜oes est´aveis emM. Uma segunda etapa ´e obter interpreta¸c˜oes geom´etrica para tais geradores ou para combina¸c˜oes lineares deles. Os invariantes do tipo Vassiliev de primeira ordem j´a obtidos s˜ao de:
(i) Curvas planas imersas, por V. I. Arnol’d em [3];
(ii) Aplica¸c˜oes est´aveis de superf´ıcies em R3, por V. Goryunov em [15];
(iii) Aplica¸c˜oes est´aveis de superf´ıcies em R2, por T. Ohmoto e F. Aicardi em [26];
(iv) Aplica¸c˜oes est´aveis de 3-variedades em R2, por M. Yamamoto em [40];
(v) Aplica¸c˜oes est´aveis de 3-variedades emR3, por R. Oset Sinha e M. C. Romero Fuster em
[27].
Um dos objetivos deste trabalho ´e estudar os invariantes locais do tipo Vassiliev de primeira ordem de aplica¸c˜oes est´aveis de uma 3-variedade fechada orientada em R4.
Assim, no Cap´ıtulo 1 obtemos a classifica¸c˜ao dos multigermes deR3 em R4 sob a a¸c˜ao do
grupo A com Ae-codimens˜ao no m´aximo 2. Para isso utilizamos o m´etodo descrito por R. G.
Wik Atique em [36] que nos permite reduzir aA-classifica¸c˜ao de multigermes para a classifica¸c˜ao de germes de fun¸c˜oes definidos em R4 segundo o subgrupo VK do grupo de contatoK.
No Cap´ıtulo 2 determinamos os conjuntos de bifurca¸c˜ao dos multigermes deAe-codimens˜ao
2 e seus diagramas de adjacˆencias. Para cada germe f de Ae-codimens˜ao 2, seja fu,v uma
deforma¸c˜aoAe-versal def, onde (u, v) s˜ao os parˆametros da fam´ılia. O conjunto dos parˆametros
para os quais o germefu,v ´e n˜ao est´avel,B(f), ´e denominadoconjunto de bifurca¸c˜ao def . Para
(u, v)∈ B(f) identificamos osfu,v′sem nossa lista de germes deAe-codimens˜ao menor ou igual a
1, isto ´e, determinamos osdiagramas de adjacˆencias def. Para obter os conjuntos de bifurca¸c˜ao dos monogermes utilizamos o m´etodo descrito por J. Rieger em [29], o qual descrevemos a seguir de maneira sucinta. Seja
Dk(fu,v) ={(x1, x2,· · ·, xk)∈R3× · · · ×R3; fu,v(x1) =· · ·=fu,v(xk), xl6=xj sel6=j}
o espa¸co dos pontosk-m´ultiplos defu,v. Associamos afu,v germes de aplica¸c˜oesGcujas fun¸c˜oes
coordenadas definem Dk(fu,v). Em [20], W. L. Marar e D. Mond obt´em estas fun¸c˜oes
coorde-nadas. O conjunto de bifurca¸c˜ao def consiste dos parˆametros (u, v) para os quais os germesG
s˜ao n˜ao submersivos. Para os multigermes procedemos de maneira an´aloga, s´o que neste caso cada fun¸c˜ao coordenada deG´e calculada diretamente da defini¸c˜ao de Dk(fu,v).
3
aplica¸c˜oes est´aveis de uma 3-variedade orientada M emR4. Como comentado anteriormente, o
conjunto discriminante deC∞(M,R4) ´e particionado em estratos de codimens˜ao 1 e 2, os quais
correspondem aos germes obtidos na nossa classifica¸c˜ao. Para cada estrato de codimens˜ao 1 associamos uma coorienta¸c˜ao que consiste em estabeler um crit´erio que distingua quando um caminho transversal em C∞(M,R4) cruza-o de maneira positiva ou negativa. Considerando a
orienta¸c˜ao da 3-variedadeM obtemos uma parti¸c˜ao dos estratos de codimens˜ao 1. A importˆ an-cia de tal etapa ´e percebida durante o processo. Em seguida determinamos osistema coerente, isto ´e, um sistema de equa¸c˜oes lineares que ´e obtido tomando caminhos fechados ao redor de cada estrato de codimens˜ao 2. Ao resolver este sistema de equa¸c˜oes obtemos que o espa¸co dos invariantes locais do tipo Vassiliev de primeira ordem de aplica¸c˜oes est´aveis de uma 3-variedade orientada em R4 ´e 4-dimensional. Para dois dos quatro geradores estabelecemos a seguinte
in-terpreta¸c˜ao geom´etrica: o n´umero de pontos qu´adruplosIQ da imagem de uma aplica¸c˜ao est´avel
e o n´umero de pares de pontos do tipo crosscap/plano IC/P de uma tal imagem.
Ainda no Cap´ıtulo 3, estudamos o caso de imers˜oes est´aveis e determinamos os invariantes locais para esta situa¸c˜ao. Obtemos que o espa¸co dos invariantes locais do tipo Vassiliev de primeira ordem de imers˜oes est´aveis de uma 3-variedade orientada emR4 ´e 3-dimensional. Uma
interpreta¸c˜ao para cada gerador ´e: o n´umero de pares de pontos qu´adruplos IQ da imagem de
uma imers˜ao est´avel e dois ´ındices de interse¸c˜aoIℓ+ eIℓ− introduzidos por V. Goryunov em [15].
Provamos ainda que a caracter´ıstica de Euler da imagem das imers˜oes est´aveis ´e um invariante do tipo Vassiliev e a expressamos como combina¸c˜ao linear dos outros trˆes invariantes.
Os resultados obtidos no caso de imers˜oes est´aveis est˜ao reunidos no artigo Topological invariants of stable immersions of oriented 3-manifolds in R4, veja [7].
Para finalizar os estudos do Cap´ıtulo 3 obtemos como invariante n˜ao local do tipo Vassiliev o n´umero de componentes conexas da curva de pontos triplos na imagem de uma aplica¸c˜ao est´avel.
Como outra aplica¸c˜ao da classifica¸c˜ao de singularidades podemos citar o trabalho de J. W. Bruce e J. M. West [6], onde investigam a geometria do crosscap emR3 atrav´es do seu contato
com planos deR3 na origem . Este estudo ´e feito por meio da fam´ılia de fun¸c˜oes altura. Seja g
uma parametriza¸c˜ao do crosscap, ou seja, g ´e A-equivalente a f(x, y) = (x, y2, xy). A imagem
def ´e chamada de crosscap padr˜ao. Bruce e West observam que uma fun¸c˜ao altura definida na imagem deg pode ser vista como uma fun¸c˜ao definida no crosscap padr˜ao. Ent˜ao, eles mostram que genericamente os germes de fun¸c˜oes altura definidos no crosscap tem XR-codimens˜ao no
m´aximo 2, onde X ´e o crosscap padr˜ao. Desta maneira, analisando as singularidades destes germes de fun¸c˜oes, obt´em informa¸c˜oes sobre a geometria da curva de pontos duplos do crosscap e sobre o contato dele com planos.
Analogamente, no Cap´ıtulo 4, obtemos informa¸c˜oes sobre a geometria da suspens˜ao do crosscap (´unica singularidade est´avel de R3 em R4, cuja parametriza¸c˜ao g ´e A-equivalente a
f(x, y, z) = (x, y, z2, yz)) considerando seu contato com hiperplanos deR4 na origem .
Cap´ıtulo 1
Classifica¸
c˜
ao de multigermes de
R
3
em
R
4
e de coposto
1
Nosso objetivo neste cap´ıtulo ´e obter as formas normais dos multigermes simples de R3
em R4 de Ae-codimens˜ao 1 e 2 e coposto 1. Tal classifica¸c˜ao ´e fundamental para o estudo que
desenvolveremos no Cap´ıtulo 3 sobre os invariantes locais do tipo Vassiliev de uma 3-variedade fechada emR4.
A lista dos multigermes est´aveis foi obtida por Mather em [22] e ´e a seguinte:
1. (x, y, z,0)
2. (x, y, z2, yz)
3.
(
(x, y, z,0)
(x, y,0, z)
4.
(
(x, y, z2, yz) (0, x, y, z)
5.
(x, y, z,0)
(x, y,0, z)
(x,0, y, z)
6.
(x, y, z,0)
(x, y,0, z)
(x,0, y, z) (0, x, y, z)
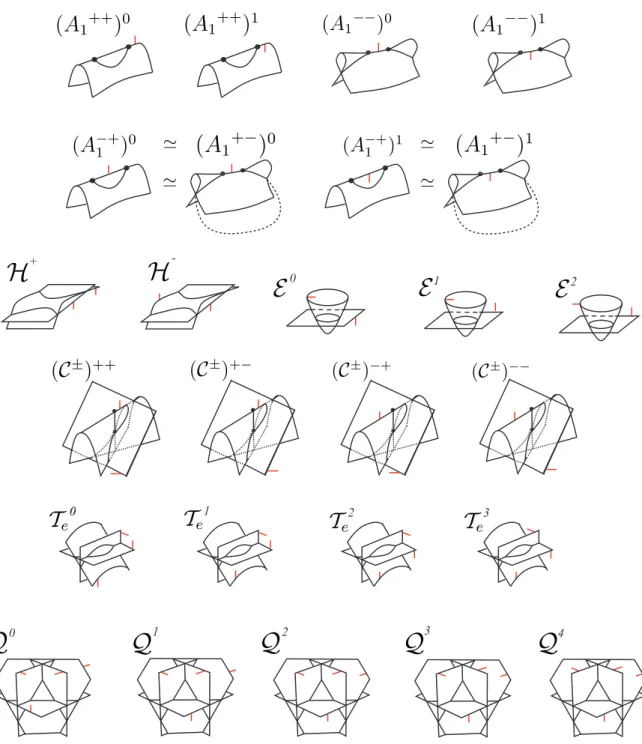
Em [19], K. Houston e N.P. Kirk obt´em uma classifica¸c˜ao para monogermes. Os de Ae
M onogerme Ae−codimens˜ao Nome
(x, y, z2, z(z2±x2±yk)), k= 1,2 k A±±
k
(x, y, z3+xz, zk+3+yz), k= 1,2 k Rk
(x, y, z2, z(z4±x2±y2)) 2 A3
(x, y, z3±y2z, xz+yz2) 2 S±
Na Se¸c˜ao 1.1 apresentamos algumas defini¸c˜oes b´asicas e resultados da teoria de singulari-dade que se fazem necess´arios para o bom entendimento de nosso trabalho. ´E tamb´em nesta se¸c˜ao que descrevemos o m´etodo que utilizamos na obten¸c˜ao dos multigermes de R3 em R4
de Ae-codimens˜ao 1 e 2 e coposto 1. Nas demais se¸c˜oes desenvolvemos tal m´etodo obtendo a
classifica¸c˜ao desejada.
1.1
Teoria cl´
assica de Singularidades
Seja S um subconjunto de Rn. Consideremos o conjunto de todas as aplica¸c˜oes de classe
C∞f :U →Rp, ondeU ´e uma vizinhan¸ca deS emRn.Neste conjunto introduzimos a seguinte
rela¸c˜ao de equivalˆencia: duas aplica¸c˜oes f :U1 → Rp e g :U2 → Rp s˜ao equivalentes se existir
uma vizinhan¸ca U ⊂ U1 ∩U2 de S em Rn tal que f|U = g|U. As classes de equivalˆencia
s˜ao chamadas multigermes de f em S e denotadas por f : (Rn, S) → (Rp, f(S)). Quando S
consiste de um ´unico elemento tais classes s˜ao tamb´em chamadas monogermes. Quando n˜ao houver a necessidade de especifica¸c˜ao usaremos o termogerme para denominar um monogerme ou multigerme.
Consideremos S um conjunto finito, ou seja, S = {s1, . . . , sr}. ´E suficiente estudarmos
multigermes onde f(S) = 0, uma vez que a classifica¸c˜ao de multigermes com f(S) finito e n˜ao unit´ario se reduz a este caso. O germe de f em si ser´a chamado de ramo e denotado
por f(i) : (Rn, s
i) → (Rp,0). Quando necess´ario mencionarmos o n´umero de ramos de um
multigerme, o denominaremos porr-germe.
SejamEno anel local dos germes de fun¸c˜oes de classeC∞f : (Rn,0)→(R,0) eMn={f ∈
En; f(0) = 0} seu ideal maximal . O conjunto dos monogermesf : (Rn,0)→(Rp,0), denotado
porEn,p, ´e um En-m´odulo livre de posto p.O subm´odulo consistindo dos germes que satisfazem
f(0) = 0 ´e dado por Mn· En,p. Assim, o conjunto dos multigermes f : (Rn, S) → (Rp,0) ´e
isomorfo `a ⊕r
1Mn·En,p, isto ´e, `a soma direta de r c´opias de Mn·En,p.
Um germef ∈ En,p induz o homomorfismo de ´algebras
f∗ : E
p → En
1.1 Teoria cl´assica de Singularidades 7
A multiplicidade local de um germe de aplica¸c˜ao f ∈ En,p´e
mf(0) = dimRfE∗Mn
p
Denotamos porJk(n, p) o espa¸co vetorial real das aplica¸c˜oesf :Rn→Rp onde cada fun¸c˜ao
coordenada fi de f ´e um polinˆomio de grau menor ou igual a k nas coordenadas x1, . . . , xn e
com termo constante nulo. Os elementos de Jk(n, p) s˜ao chamadosk-jatos.
Sejamf ∈ En,p ek∈Z, k≥1. Ok-jato de f ema, denotado porjkf(a), ´e definido por
Df(a)(x) +
1 2!D
2f
(a)(x, x) +· · ·+
1
k!D
kf
(a)(x, . . . , x),
isto ´e,jkf(a) ´e a expans˜ao em s´erie de potˆencias def(x+a)−f(a) em torno da origem, truncada no termo de grauk.
Um germe f ∈ Mn· En,p ´e dito k− G-determinado (onde G ´e um grupo de Mather) se
qualquer g ∈ Mn·En,p tal que jkg(0) =jkf(0) ´eG-equivalente a f. Sef ´ek− G-determinado
para algumk diremos simplesmente que f ´e finitamenteG-determinado.
1.1.1 Rela¸c˜oes de equivalˆencias e espa¸cos tangentes
Introduzimos algumas rela¸c˜oes de equivalˆencias considerando os grupos de Mather A,R e
K e os subgrupos VR e VK. Para ver detalhes de defini¸c˜oes b´asicas e resultados destas e de outras rela¸c˜oes de equivalˆencias utilizadas na teoria de singularidades, veja [5, 10, 35] .
Seja R o grupo de germes de difeomorfismos ψ : (Rn, s) → (Rn, s) com a opera¸c˜ao de
composi¸c˜ao. Este grupo age em En,p da seguinte maneira: dois germes f, g : (Rn, s) → (Rp,0)
s˜aoR-equivalentes se existir ψ∈ Rtal queg=f◦ψ−1. Denominamos tal grupo degrupo das
mudan¸cas de coordenadas na fonte.
SejaA o grupo dos pares de germes de difeomorfismos (ψ, ϕ), onde ψ∈ R e ϕ: (Rp,0)→
(Rp,0), com a opera¸c˜ao de composi¸c˜ao em cada coordenada. Este grupo age emEn,pda seguinte
maneira: dois germes f, g : (Rn, s) → (Rp,0) s˜ao A-equivalentes se existir (ψ, ϕ) ∈ A tal que
ϕ◦g=f ◦ψ.
A A-equivalˆencia de multigermes ´e definida como segue: dois r-germes f, g : (Rn, S) →
(Rp,0) s˜ao A-equivalentes se existirem (ψ(i), ϕ) ∈ A,i= 1, . . . , r, tais queϕ◦g(i) =f(i)◦ψ(i).
Isto significa que para cada ramo podemos escolher uma mudan¸ca de coordenadas na fonte, enquanto que na meta a mesma mudan¸ca de coordenadas deve ser aplicada para todos os ramos.
Consideremos (V,0) um germe de uma subvariedade anal´ıtica em (Rp,0) (para mais
deta-lhes, veja [16]) e seja I o ideal em Ep que define V, isto ´e, o ideal dos germes de fun¸c˜oes que
se anulam em V. Denotamos por VR o subgrupo de R consistindo dos germes em R tais que
Definimos K (grupo de contato) como sendo o grupo dos germes de difeomorfismos H : (Rp×R,0)→(Rp×R,0) dados por H(x, t) = (ψ(x),He(x, t)), onde ψ∈ R eHe(x,0) = 0. Este
grupo age emEp da seguinte maneira: seh1, h2 ∈ Ep, ent˜ao h1 eh2 s˜aoK-equivalentes se existir H ∈ K tal que H(x, h1(x)) = (ψ(x), h2(ψ(x))). Em outras palavras, H leva o gr´afico de h1 no
gr´afico de h2. Denotamos por VK o subgrupo de K consistindo dos germes de difeomorfismos
H= (ψ,He) como acima, tais queψ∈VR. E porVKk, o subgrupo deVKconsistindo dosk-jatos de germes de difeomorfismos emVK.
Para mais detalhes da pr´oxima defini¸c˜ao, veja [35].
O espa¸co tangente aA-´orbita def : (Rn, S)→(Rp,0) ´e dado por
TA·f =tf(Mnθ(n)S) +ωf(Mpθ(p))⊆ Mnθ(f)
ondeθ(n) consiste dos germes em 0 de campos vetoriais emRn,θ(n)S´e a soma direta der-c´opias
de θ(n) eθ(f) consiste dos germes em 0 de campos vetoriais ao longo de f. Neste casoθ(f) ´e a soma direta de θ(f(i)), onde f(i) ´e ramo de f, e pode ser identificado com a soma direta de r-c´opias deEn,p. O espa¸co tangente estendido ´e dado por
TAe·f =tf(θ(n)S) +ωf(θ(p))⊆θ(f)
e aAe-codimens˜ao def ´e dada por
dimR
θ(f)
TAe·f
= dimRNAef,
onde a dimens˜ao ´e como espa¸co vetorial sobreRe NAef ´e chamado de espa¸co normal a f.
O pr´oximo resultado nos fornece o espa¸co tangente ah∈ Ep segundo o grupoVR(veja [5]).
Lema 1.1 Seja h∈ Ep. Ent˜ao
TVR·h={ξ·h; ξ ∈ Mpθ(p)∩Derlog(V)}
e
TVRe·h={ξ·h; ξ ∈Derlog(V)}
onde Derlog(V) ={ξ ∈θ(p); ξ·h˜ ∈I,∀ ˜h∈I} e I ⊆ Ep ´e um ideal que define V.
Usaremos o programa Macaulay [4] para calcular oDerlog(V) onde necess´ario.
O espa¸co tangente ah∈ Ep segundo o grupoVK´e
TVK·h=TVR·h+h∗(M1)· Mp.
O espa¸co tangente estendido ´e
1.1 Teoria cl´assica de Singularidades 9
e aVKe-codimens˜ao de h´e
dimR
θ(h)
TVKe·h
= dimRNVKe·h.
Observemos que se a origem ´e fixada por todos os elementos deDerlog(V), ent˜ao TVR·h=
TVRe·h. Logo, TVK·h=TVKe·h.
SejaVRk o subgrupo de VRque consiste dos elementos de VR cujok-jato ´e a identidade.
O espa¸co tangente ah∈ Ep segundo o grupoVR1 ´e
TVR1·h={ξ·h; ξ ∈ M2pθ(p)∩Derlog(V)}
e o espa¸co tangente segundo o grupoTVK1·h ´e
TVK1·h=TVR1·h+h∗(M1)· Mp.
1.1.2 M´etodo de classifica¸c˜ao
Determinar as A-classes de germes finitamente determinados em ⊕r
1En,p n˜ao ´e uma tarefa
f´acil. Afortunadamente, no caso (n, n+ 1) podemos reduzir a A-classifica¸c˜ao de multigermes para a VK-classifica¸c˜ao de monogermes de fun¸c˜oes em En+1. O resultado que nos permite tal
abordagem ´e devido a R. G. Wik Atique (veja [36]) e ´e o seguinte.
Teorema 1.2 Dados Se = {s1, ..., sr−1} e S = Se∪ {sr} subconjuntos de Cn e fe: (Cn,Se) →
(Cn+1,0) um multigerme finitamente A-determinado, consideremos g,eg : (Cn, S) → (Cn+1,0)
multigermes finitamente A-determinados tais que g(i) =eg(i) =f(i) para i= 1, . . . , r−1. Ent˜ao
g e ge s˜ao A-equivalentes se, e somente se, h e eh s˜ao VK-equivalentes onde h,eh ∈ On+1 s˜ao
equa¸c˜oes reduzidas que definem as imagens de g(r) e eg(r), respectivamente, e V ´e a imagem de e
f.
Precisamos agora de uma rela¸c˜ao entre as Ae-codimens˜oes de f eg com a VKe-codimens˜ao
de h . Neste sentido temos o seguinte resultado (veja [36]).
Teorema 1.3 Sejam Se = {s1, ..., sr−1} e S = Se∪ {sr} subconjuntos de Cn, f : (Cn,Se) →
(Cn+1,0) um multigerme finitamente A- determinado e g,eg : (Cn, S) → (Cn+1,0) satisfazendo
g(i) =f(i) para i= 1, . . . , r−1 e g(r) uma imers˜ao. Se h ∈ O
n+1 ´e uma equa¸c˜ao reduzida que
define a imagem de g(r) e V ´e a imagem de f, ent˜ao a Ae-codimens˜ao de g ´e dada pela soma
das Ae-codimens˜ao de f e a VKe-codimens˜ao de h.
O pr´oximo resultado foi obtido por J. Mather em [22] e nos d´a como determinar asG-´orbitas emM, ondeG´e um grupo de Lie eM uma variedade diferenci´avel.
(1) Para qualquer x∈S, TxG·x⊇TxS;
(2) A dimens˜ao de TxG·x independe de x∈S;
(3) S ´e conexa.
Ent˜aoS est´a contida numa ´unica G-´orbita.
O m´etodo da tranversal completa que descrevemos abaixo, juntamente com o Lema de Mather, nos permite obter as VKk-´orbitas emJk(n+ 1,1) da seguinte maneira:
(i) Dado um determinado k-jato, aplicamos a transversal completa para obter as poss´ıveis ´
orbitas emJk+1(n+ 1,1) de (k+ 1)-jatos cujo k-jato ´e o considerado;
(ii) A fim de reduzir esta lista aplicamos o Lema de Mather ou realizamos mudan¸cas de coor-denadas apropriadas;
(iii) Para cada poss´ıvel (k+ 1)-jato verificamos a ordem de sua determina¸c˜ao como germe. Se for (k+ 1)-determinado obtemos o representante de uma VK-´orbita em En+1. Caso
contr´ario, repetimos o procedimento descrito em (i).
´
E com o Teorema da Transversal Completa que produzimos uma lista de poss´ıveis (k+ 1)-jatos.
Teorema 1.5 (Teorema da Transversal Completa) Sejamσ∈Jk(n+1,1), Hk+1 ⊂Jk+1(n+
1,1), o subespa¸co das aplica¸c˜oes polinomiais homogˆeneas de grau k+ 1, e T = hβ1, . . . , βri ⊂
Hk+1 subespa¸co tais que
Mkn+1+1·En+1⊂TVK1·σ+T +Mkn+2+1·En+1.
Ent˜ao para qualquer σ˜∈Jk+1(n+ 1,1)com jkσ˜(0) =σ ´e VKk1+1-equivalente a
σ+
r X
i=1 αiβi,
onde αi∈R.
O subespa¸coT =hβ1, . . . , βri´e a transversal completa.
Por fim, um crit´erio para a VK-determina¸c˜ao finita. O resultado seguinte ´e an´alogo ao do grupo K (veja [36]).
1.1 Teoria cl´assica de Singularidades 11
1.1.3 Desdobramentos versais
Umdesdobramento a m-parˆametros de umr-germef0 : (Rn, S)→(Rn+1,0) ´e um r-germe
F : (Rn×Rm, S× {0}) → (Rn+1×Rm,0)
(x, u) 7→ (f(x, u), u)
tal quef(x,0) =f0(x). O germef(x, u), que denotaremos porfu(x), ´e chamado umadeforma¸c˜ao
de f0.
Consideremos o grupo de Mather A (os resultados seguintes s˜ao an´alogos para qualquer outro grupo de Mather). Dois desdobramentos F, G: (Rn×Rm, S× {0})→(Rn+1×Rm,0) de
f0s˜aoisomorfosse existirem germes de difeomorfismosφi: (Rn×Rm,{si}×{0})→(Rn×Rm,0),
i= 1, . . . , r, e ψ : (Rn+1×Rm,0)→ (Rn+1×Rm,0) que s˜ao desdobramentos a m-parˆametros
dos germes da identidade em Rn e Rn+1, respectivamente, e G(i) =ψ◦F(i)◦φ−1
i , i= 1, . . . , r,
lembrando que G(i) e F(i) denotam o i-´esimo ramo deGe F.
Dado um germe h : (Rt,0) → (Rm,0) e F um desdobramento de f0, definimos o
pull-back de F por h, denotado por h∗F, como sendo o desdobramento at-parˆametros h∗F(x, v) =
(f(x, h(v)), v).
Dizemos que F e G s˜aoequivalentes se existir um difeomorfismo Φ : (Rm,0)→(Rm,0) tal
queG´e isomorfo a Φ∗F. SeG´e um desdobramento at-parˆametros def
0(tn˜ao necessariamente
igual am), dizemos queG´e induzidopor F se existir um germeh: (Rt,0)→(Rm,0) tal queG
´e isomorfo ah∗(F).
Seja F(x, u) = (f(x, u), u) um desdobramento de f0. Dizemos que F ´e versal se todos os
desdobramentos def0 s˜ao induzidos por F.
Enunciemos agora o teorema fundamental da existˆencia de desdobramentos versais.
Teorema 1.7 Um desdobramento a m-parˆametros F(x, u) = (f(x, u), u) de f0 ´e Ae-versal se,
e somente se, aAe-codimens˜ao de f0 ´e finita e
TAe·f0+R{F˙1, . . . ,F˙m}=⊕r1En,n+1,
onde F˙i= ∂u∂fi(x,0), para i= 1, . . . , m.
Observemos que se a Ae-codimens˜ao def0 ´ece g1,· · ·, gc ∈ ⊕r1En,n+1 formam uma R-base
do complementar deTAe·f0 em⊕r1En,n+1, ent˜ao
F(x, u) = (f0(x) +
c X
i=1
uigi(x), u)
1.1.4 Opera¸c˜oes de aumenta¸c˜ao e concatena¸c˜ao
Todos os multigermes com mais de um ramo deAe-codimens˜ao 1 e coposto 1 de aplica¸c˜oes de
classeC∞ (ou anal´ıticas) (Kn, S)→(Kp,0), com n≥p−1, (n, p) nas boas dimens˜oes segundo Mather e K =C ou K =R, podem ser obtidos por opera¸c˜oes de aumenta¸c˜ao e concatena¸c˜ao.
Para mais detalhes sobre o assunto veja o trabalho de T. Cooper, D. Mond e R. G. Wik-Atique [9].
Sejamf : (Rn, S)→(Rp,0) um germe deAe-codimens˜ao 1 onde S´e um subconjunto finito
de Rn e
F : (Rn×R, S× {0}) → (Rp×R,0)
(x, u) 7→ (fu(x), u)
.
um desdobramentoAe-versal de f. Definimos
A±f : (Rn×R, S× {0}) → (Rp×R,0)
(x, λ) 7→ (f±λ2(x), λ)
.
A A-classe de equivalˆencia de A±f independe da escolha do desdobramento Ae-versal F de f.
ChamamosA+f deaumenta¸c˜ao positiva de f eA−f deaumenta¸c˜ao negativa de f. O germeA±f tem
Ae-codimens˜ao 1 e um desdobramentoAe-versal deA±f ´e dado porG(x, λ, µ) = (f±λ2+µ(x), λ, µ).
Exemplo 1.8 Seja f±(x, z) = (x, z2, z3 ±x2z) o germe de R2 em R3 de Ae-codimens˜ao 1.
Consideremos o seguinte desdobramentoAe-versal de f±,
F±(x, z, u) = (x, z2, z3±x2z+uz, u).
Ent˜ao, as aumenta¸c˜oes positiva e negativa def+ s˜ao dadas por A±f+(x, z, u) = (x, z2, z3+x2z±
u2z, u). Logo, obtemos os germes de R3 emR4
A±1+: (x, y, z2, z(z2±x2+y2))
de Ae-codimens˜ao 1. Se considerarmos a aumenta¸c˜ao negativa de f− obtemos o germe A−−1 ,
tamb´em de Ae-codimens˜ao 1.
H´a duas opera¸c˜oes de concatena¸c˜ao: mˆonica e bin´aria. A opera¸c˜ao deconcatena¸c˜ao mˆonica
consiste em produzir a partir de um multigerme comr-ramos um novo multigerme com r+ 1-ramos, onde o ramo extra ´e uma dobra (no caso n ≥p) ou uma imers˜ao (no caso n < p). J´a a concatena¸c˜ao bin´aria consiste em combinar dois multigermes de codimens˜ao 1 para obter um novo multigerme.
Daremos ˆenfase `a opera¸c˜ao de concatena¸c˜ao mˆonica para a obten¸c˜ao de multigermes deRn
emRn+1 e de Ae-codimens˜ao 1.
Sejaf : (Rn, S)→(Rn+1,0) um multigerme deAe-codimens˜ao 1 eF(x, u) = (fu(x), u) um
1.1 Teoria cl´assica de Singularidades 13
Cf : (Rn×R, S× {0})→(Rn+1×R,0) dado por
Cf : (
(x, u)7→(fu(x), u)
(x, u)7→(x,0) .
A A-classe de equivalˆencia deCf independe da escolha do desdobramento Ae-versal F de f. O
germeCf temAe-codimens˜ao 1.
Vejamos um exemplo desta opera¸c˜ao.
Exemplo 1.9 Seja f :
(
(y, z2, yz)
(y, y, z) o bigerme de
R2 em R3 de Ae-codimens˜ao1.
Considere-mos o seguinte desdobramento Ae-versal de f, F : (
(y, z2, yz, u)
(y+u, y, z, u) . A concatena¸c˜ao mˆonica
de f ´e dada por
Cf :
(y, z2, yz, u)
(y+u, y, z, u)
(y, z, u,0)
.
Realizando mudan¸cas de coordenadas na fonte e na meta obtemos o trigerme de R3 em R4 de
Ae-codimens˜ao1
Tc :
(x, y, z2, yz) (0, x, y, z)
(x, x+y, y, z)
.
Sejaf : (Rn, S)→(Rn+1,0) um multigerme deAe-codimens˜ao 1 efu sua deforma¸c˜ao versal.
A menos de homeomorfismo, existem duas (possivelmente equivalentes) escolhas para a imagem de fu: uma para u positivo e outra para u negativo. Denotamos tais imagens por D+(f) e
D−(f), respectivamente. Da mesma maneira denotamos porD+(A±
f) e D−(A±f) as imagens de
f±u2+λ paraλpositivo e negativo, respectivamente.
Os pr´oximos resultados foram obtidos por T. Cooper, D. Mond e R. G. Wik-Atique em [9].
Proposi¸c˜ao 1.10 Com a nota¸c˜ao acima
(i) D+(A+
f) ´e homotopicamente equivalente a D+(f);
(ii) D−(A+f) ´e homotopicamente equivalente a S(D−(f));
(iii) D+(A−f) ´e homotopicamente equivalente a S(D+(f));
(iv) D−(A−
f) ´e homotopicamente equivalente a D−(f);
Com respeito a opera¸c˜ao de concatena¸c˜ao mˆonica temos o seguinte.
Proposi¸c˜ao 1.11 Seja f um multigerme de Ae-codimens˜ao1. A imagem de uma deforma¸c˜ao
versal do multigerme Cf ´e homotopicamente equivalente `a suspens˜ao da imagem de uma
defor-ma¸c˜ao versal de f.
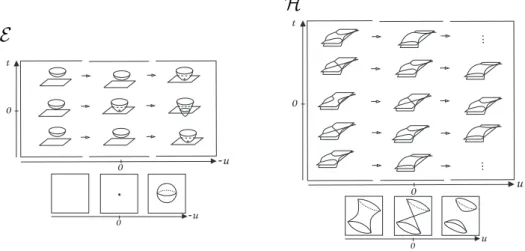
1.1.5 Suspens˜ao do crosscap
A superf´ıcie em R3 dada pela equa¸c˜ao W2 −Y2Z = 0, onde (Y, Z, W) representam as
coordenadas em R3, ´e chamada de guarda-chuva de Whitney. Notemos que a ´unica parte do
guarda-chuva de Whitney que pertence a regi˜ao Z <0 ´e o eixoZ.
Y Z
W
Seja fe : (R2,0) → (R3,0) o germe definido por fe(y, z) = (y, z2, yz). A imagem de fe´e
o guarda-chuva de Whitney sem seu “cabo”, isto ´e, sem a semirreta Y = W = 0 e Z < 0. Definimos um crosscap como a imagem de qualquer germe g que ´eA-equivalente a fe. Oponto de crosscap ´e a imagem da origem de R2 pelo germe g. Chamamos o crosscap parametrizado
por fede crosscap padr˜ao. Whitney provou em [39] que tal singularidade ´e est´avel e que ´e a ´
unica singularidade local que aparece numa aplica¸c˜ao est´avel deR2 em R3.
Consideramos agora a variedade V definida pela mesma equa¸c˜ao que o guarda-chuva de Whitney emR3,W2−Y2Z = 0, mas agora emR4 e com coordenadas (X, Y, Z, W). O desenho
acima representaV em cada se¸c˜ao 3-dimensional (t, Y, Z, W),comt∈Rfixo. Sejaf : (R3,0)→
(R4,0) o germe de aplica¸c˜ao definido por f(x, y, z) = (x,fe(y, z)) = (x, y, z2, yz). Temos que a
imagem de f ´e dada por V menosY = W = 0 X ∈ R e Y <0. Definimos uma suspens˜ao do
crosscap como sendo a imagem de qualquer germe h que ´eA-equivalente a f. A imagem de h
cont´em uma curva de pontos de crosscap. A suspens˜ao do crosscap parametrizado por f ser´a chamada desuspens˜ao do crosscap padr˜ao (ou simplesmente suspens˜ao do crosscap).
1.2
Classifica¸
c˜
ao de bigermes
A partir deste momento denotaremos por (x, y, z) e (X, Y, Z, W) as coordenadas em R3 e R4 respectivamente.
1.2 Classifica¸c˜ao de bigermes 15
Lema 1.12 Seja f um bigerme de R3 em R4, onde cada ramo ´e uma imers˜ao. Ent˜ao f ´e
A-equivalente a
(
(x, y, z,0)
(x, y, z, ϕ(x, y, z)) ,
onde ϕ(x, y, z) ´e chamada fun¸c˜ao de contato.
Proposi¸c˜ao 1.13 Sejam
f :
(x, y, z) f1
→(x, y, z,0) (x, y, z) f2
→(x, y, z, ϕ(x, y, z)) e
e
f :
(x, y, z) fe1
→(x, y, z,0)
(x, y, z) fe2
→(x, y, z,ϕe(x, y, z))
ent˜ao,
(i) f ´e A-equivalente afese, e somente se,ϕ ´eK-equivalente a ϕe.
(ii) Se f ´e finitamenteA-determinado, ent˜ao
TAe·f =
E3 E3
E3 E3
E3 E3
TKe·ϕ TKe·ϕ +
0 0
0 0
0 0
∆(E3 × E3)
,
onde ∆(E3× E3)´e a diagonal em E3× E3.
Demonstra¸c˜ao: (i) Suponhamos ϕK-equivalente aϕe. Ent˜ao, existe um germe de difeomor-fismo
H : (R3×R,(0,0))→(R3×R,(0,0))
dado por H(x, y, z, t) = (h(x, y, z),He(x, y, z, t)) e satisfazendo
(a) h: (R3,0)→(R3,0) ´e um germe de difeomorfismo;
(b) He(x, y, z,0) = 0;
(c) H(x, y, z, ϕ(x, y, z)) = (h(x, y, z),ϕe(h(x, y, z)).
´
E f´acil ver queH◦fi=fei◦h,i= 1,2. Portanto,f ´eA-equivalente afe.
Reciprocamente, suponhamosf A-equivalente af .e Ent˜ao, existem germes de difeomorfismos
φi: (R3,0)→(R3,0), i= 1,2, e ψ: (R4,0)→(R4,0), ψ = (ψ1, ψ2, ψ3, ψ4) tais que
(1) ψ◦f1=fe1◦φ1;
Definimos
H : (R3×R,(0,0)) → (R3×R,(0,0))
(x, y, z, t) 7→ (φ2(x, y, z), ψ4(x, y, z, t)) .
Segue de (1) queψ4(x, y, z,0) = 0 e comoψ´e um difeomorfismo, ∂ψ∂t4(0)6= 0. Logo,H ∈ K. De
(2) temos que H(x, y, z, ϕ(x, y, z)) = (φ2(x, y, z),ϕe(φ2(x, y, z))) e portanto ϕ´e K-equivalente a
e
ϕ.
(ii) Primeiramente mostremos que
E3 E3
E3 E3
E3 E3
TKe·ϕ TKe·ϕe + 0 0 0 0 0 0
∆(E3 × E3)
⊆TAe·f.
Seja π : R4 → R3 a proje¸c˜ao dada por π(X, Y, Z, W) = (X, Y, Z), consideremos o
homo-morfismo induzido
π∗: E
3 → E4
g 7→ g◦π
e
g1 eg1 g2 eg2 g3 eg3
0 0 ∈
E3 E3
E3 E3
E3 E3
0 0
.Ent˜ao
g1 eg1 g2 eg2 g3 eg3
0 0
= tf
g1−eg1 0 g2−eg2 0
g3−eg3 0
+ ωf
π∗(ge
1) π∗(g2e)
π∗(ge
3) 0 . Logo,
E3 E3
E3 E3
E3 E3
0 0
⊆TAe·f.
SejaA=
0 0 0 0 0 0 g 0
com g∈TKe·ϕ. Notemos que A∈TAe·f. De fato, como g∈TKe·ϕ,
existem p, hi ∈ E3, i= 1,2,3,tais queg=h1·ϕx+h2·ϕy+h3·ϕz+p·ϕ. Assim,
0 −h1
0 −h2
0 −h3
g 0
=tf
0 −h1
0 −h2
0 −h3
+ωf
0 0
π∗(g)−W ·π∗(p)
1.2 Classifica¸c˜ao de bigermes 17
Agora, se considerarmos
0 h1
0 h2
0 h3
0 g
=tf
0 h1
0 h2
0 h3
+ωf
0 0
W ·π∗(p)
∈TAe·f,
temos que 0 0 0 0 0 0 0 g
∈TAe·f.
Por fim, seg∈ E3, ent˜ao
0 0 0 0 0 0 g g =ωf
0 0 0 0 0 0
π∗(g) π∗(g)
∈TAe·f,
isto ´e, 0 0 0 0 0 0
∆(E3 × E3)
⊆TAe·f.
Resta mostrarmos queTAe·f ⊆
E3 E3
E3 E3
E3 E3
TKeϕ TKeϕe + 0 0 0 0 0 0
∆(E3 × E3)
. Seja
h1 eh1 h2 eh2 h3 eh3 g eg
∈TAe·f,comg, g, he i, ehi ∈ E3, i= 1,2,3. Ent˜ao, existema, b, c, ea,eb, ec∈
E3 e m, n, p, q∈ E4 tais que
h1 eh1 h2 eh2 h3 eh3 g eg
=
a ea
b eb
c ec
0 a·ϕx+b·ϕy+c·ϕz +
m◦f1 m◦f2 n◦f1 n◦f2 p◦f1 p◦f2 q◦f1 q◦f2
.
Logo, g=q(x, y, z,0),eg=a·ϕx+b·ϕy+c·ϕz+q(x, y, z, ϕ(x, y, z)) e
e
g−g=a·ϕx+b·ϕy+c·ϕz+d·ϕ(x, y, z)∈TKe·ϕ,
Portanto
h1 eh1 h2 eh2 h3 eh3 g eg
=
h1 eh1 h2 eh2 h3 eh3
0 eg−g
+ 0 0 0 0 0 0 g g ⊆
E3 E3
E3 E3
E3 E3
TKe·ϕ TKe·ϕ + 0 0 0 0 0 0
∆(E3 × E3)
. ✷
Corol´ario 1.14 Com as mesmas hip´oteses de (ii) da Proposi¸c˜ao 1.13, N Ae·f ´e isomorfo a
N Ke·ϕ.
Corol´ario 1.15 Sejam ϕ e f como na Proposi¸c˜ao 1.13. Ent˜ao, f ´e k− A-determinada se, e somente se, ϕ´e k− K-determinado.
Para o pr´oximo resultado, veja a K-classifica¸c˜ao de germes em E3 em [2].
Corol´ario 1.16 Um bigerme de imers˜oes de(R3, S)em(R4,0)e deAe-codimens˜ao no m´aximo
2 tem uma das seguintes formas normais:
Ae-codimens˜ao Nome (
(x, y, z,0)
(x, y,0, z) 0
(
(x, y, z,0)
(x, y, z, x2+y2+z2) 1 E
(
(x, y, z,0)
(x, y, z, x2+y2−z2) 1 H
(
(x, y, z,0)
(x, y, z, x2±y2+z3) 2 B
±
2
Observa¸c˜ao 1.17 Os germes E eHobtimos acima s˜ao aumenta¸c˜oes de f :
(
(y, z,0)
(y, z, y2+z2) .
De fato, consideremos o seguinte desdobramento Ae-versal def,
F :
(
(µ, y, z,0)
(µ, y, z, µ+y2+z2) .
1.2 Classifica¸c˜ao de bigermes 19
Classificaremos agora os bigermes onde um dos ramos ´e a suspens˜ao do crosscap. Neste caso em particular, estamos interessados nos bigermes de Ae-codimens˜ao at´e 3 (e n˜ao at´e 2),
pois esta classifica¸c˜ao ´e necess´aria aos estudos que desenvolvemos no Cap´ıtulo 4.
Proposi¸c˜ao 1.18 Seja f : (R3, S) → (R4,0) um bigerme de Ae−codimens˜ao no m´aximo 3 e
onde um dos seus ramos ´e a suspens˜ao do crosscap. Ent˜ao f tem uma das seguintes formas normais:
Ae−codimens˜ao Nome
(1)
(
(x, y, z2, yz)
(0, x, y, z) 0
(2)
(
(x, y, z2, yz)
(x, y±xk, y, z) k−1 k≥2 C
± (k= 2)
(3)
(
(x, y, z2, yz)
(x, x2±yk, y, z) k k≥2
(4)
(
(x, y, z2, yz)
(x, y2±xk, y, z) k k≥3
(5)
(
(x, y, z2, yz)
(x, xy+xk, y, z) k k≥3
(6)
(
(x, y, z2, yz)
(x, y,±x2±yk, z) k k≥2
(7)
(
(x, y, z2, yz)
(x, y,±y2±xk, z) k k≥3
(8)
(
(x, y, z2, yz)
(x, y, xy±xk, y, z) k k≥3
(9)
(
(x, y, z2, yz)
(x, y, z, x2±z2) 3
Demonstra¸c˜ao: SejaV a imagem da suspens˜ao do crosscap que ´e definida porW2−Y2Z = 0. Ent˜ao
Segue do Teorema 1.2 que as A-classes de tais germes s˜ao dadas pelas VK-classes em E4.
Consideremos a a¸c˜ao deVK1 em J1(4,1).
Sejah∈ E4 e j1h=aX+bY +cZ+dW ∈J1(4,1).Segue do Lema 1.1 que
TVK1·j1h=M4hai+E4hbY −2cZ,2cW, bY +dW, bWi+E4
j1h+M24. (1.1)
Determinemos as ´orbitas emJ1(4,1) sob a a¸c˜ao de
VK1.
Suponhamos a6= 0 e consideremos S = {σ =aX +bY +cZ +dW ∈ J1(4,1);a > 0}. S
´e um aberto de J1(4,1) e portanto ´e uma subvariedade. Al´em disso, S ´e claramente conexa e
TσS =J1(4,1) =TVK1·σ,∀σ ∈S. Logo, segue do Lema de Mather que S est´a contida numa
´
unica ´orbita, cujo representante ´e X. O caso a < 0 ´e an´alogo, com representante −X que ´e
VK1−equivalente a X.
Suponhamos agoraa= 0. Temos quej1h=bY +cZ+dW e por (1.1) que
TVK1·j1h=E4hbY −2cZ,2cW, bY +dW, bWi+E4j1h+M24.
Consideremosb·c6= 0 eS={σ=bY+cZ+dW ∈M; b >0, c >0}. Segue do Lema de Mather queSest´a contida numa ´unica ´orbita, cujo representante ´eY+Z. Considerando os outros casos obtemos ´orbitas com representantes±Y ±Z que s˜ao VK1-equivalentes aY +Z.
Prosseguindo desta maneira obtemos as seguinte ´orbitas emJ1(4,1): X, Y +Z, Y, Z, W,0.
Para uma melhor compreens˜ao dos pr´oximos passos desta demonstra¸c˜ao sugerimos que acompanhe o esquema da Figura 1.1.
(i) Seja h∈ E4 cujo 1-jato ´e X. Ent˜ao
TVK1·j1h=M4+M24 e M24⊆ M4 TVK·j1h+M34.
Segue da Proposi¸c˜ao 1.6 que j1h ´e 1-VK−determinado. Logo, h ´e
VK−equivalente a X e tem
VKe-codimens˜ao igual a 0. Pelo Teorema 1.2 obtemos o seguinte germe est´avel (
(x, y, z2, yz)
(0, x, y, z) .
(ii) Sejah∈ E4 cujo (k−1)-jato ´eY +Z,k≥2. A k−transversal ´e calculada como segue.
TVK1·jk−1h = {ξ·jk−1h; ξ ∈ M24θ(4)∩Derlog(V)}+E4jk−1h
= M4hY −2Z, W, Yi+E4
jk+1h
= M24\ E4
X2, X3, . . ..
Ent˜ao Xk´e a k−transversal.
Segue do Teorema da Transversal Completa que osk−jatos cujo (k−1)−jato ´e igual aY+Z
s˜aoVKk−equivalentes aY +Z+λXk, onde λ∈R. Em particular,jkh∼
VKk Y +Z+λX
k.
1. 2 Cl ass ifi ca¸ c˜ao d e b iger me s 21
J1(4,1) X Y +Z Y
W 0
1-determinado
J2(4,1) Y+Z±X2 Y +Z 2-determinado
Y +Z
Y +Z J3(4,1)
J4(4,1)
3-determinado
4-determinado 4-determinado 4-determinado 4-determinado 4-determinado 4-determinado 4-determinado
3-determinado 3-determinado 3-determinado 3-determinado 3-determinado 3-determinado
2-determinado 2-determinado 2-determinado
Y
Y +X2±Z2 Y+X2 Y+Z2 Y+XZ Z±X2±Y2 Z±X2 Z
±Y2 Z+XY
W+X2±Z2
Y +Z+X3
Y +Z±X4
Y+X2
Y+X2
Y +X2
±Z3
Y +X2
±Z4
Y+Z2
Y+Z2
Y+XZ
Y+XZ
Y+Z2+X3
Y +Z2
±X4
Y+XZ+X3
Y+XZ+X4
Z±X2
Z±X2
Z±X2+Y3
Z±X2
±Y4
Z±Y2
Z±Y2
Z±Y2+X3
Z±Y2
±X4
Z+XY
Z+XY
Z+XY±X4
Z+XY+X3
Z
Z
(∗) (∗)
(∗∗)
(∗)
(∗∗)Os germes cujo 1-jato é este, tem V Ke-codimensão maior que 3.
Os germes cujo2-jato é este, tem V Ke-codimensão maior que 3.
(∗ ∗ ∗)
(∗ ∗ ∗)
Das demais órbitas obtém-se germes deV Ke-codimensão maior que 3.
mudan¸ca de coordenada na fonte:
H: (R4,0) → (R4,0)
(X, Y, Z, W) 7→ 1
k
√
ε·λX, Y, Z, W
.
ondeε= 1 seλ >0 eε=−1 se λ <0. Como
TVKk·jkh=M4
D
Xk−1E+E4hY, Z, Wi+Mk4+1,
segue quejkh´ek
-VK−determinado. Ent˜aoh´eVK−equivalente aY+Z±Xke temVKe−codimens˜ao
igual ak−1, k≥2. Pelo Teorema 1.2 obtemos o seguinte germe deAe−codimens˜aok−1,k≥2 : (
(x, y, z2, yz)
(x, y±xk, y, z) .
(iii) Seja h∈ E4 cujo 1-jato ´eY. Determinemos as VK2-´orbitas emJ2(4,1).
Temos queTVK1·j1h=E
4hY, Wi+M24. Segue do Teorema da Transversal Completa que
o 2-jato deh ´eVK2−equivalente aY +aX2+bZ2+cXZ,ondea, b, c∈R.Ent˜ao,
TVK2·j2h=M4h2aX+cZi+E4
2bZ2+cXZ, Y, W+E4
j2h+M34.
Suponhamosa(4ab−c2)6= 0 e consideremos
S={σ=Y +aX2+bZ2+cXZ ∈J2(4,1); a >0,4ab−c2>0}.
´
E f´acil ver queS ´e uma subvariedade conexa de J2(4,1). Notemos que T
σS ⊆TVK2·j2h,para
todo σ∈S. De fato, como
2aX2+cXZ, 2aXZ+cZ2, 2bZ2+cXZ ∈ TVK2·j2h,
TσS =X2, XZ, Z2 ∈ TVK2·j2h. Segue do Lema de Mather que S est´a contida numa ´unica
´
orbita, cujo representante ´eY +X2+Z2.Os casos a(4ab−c2) <0 e a < 0,4ab−c2 <0 s˜ao an´alogos, com representanteY +X2+Z2.
Suponhamos agoraa6= 0,(4ab−c2) = 0. Realizando mudan¸cas de coordenadas que
preser-vam V na fonte obtemos uma ´orbita cujo representante ´eY +X2. Analogamente, para a= 0 obtemos as seguintes ´orbitas: Y +XZ, Y +Z2, Y. Portanto, temos 5 ´orbitas em J2(4,1) cujos representantes possuem 1-jato igual a −Y: Y +X2±Z2, Y +X2, Y +Z2, Y +XZ, Y.
(iii.1) Sejah∈ E4 cujo 2-jato ´e Y +X2±Z2.Temos que
TVK2·j2h=M4hXi+E4
Z2, Y, W+E4
j2h+M34.
Logo,j2h´e 2−VK−determinado e portantoh´e
1.2 Classifica¸c˜ao de bigermes 23
o seguinte germe de Ae−codimens˜ao 2 (
(x, y, z2, yz)
(x, x2±y2, y, z).
(iii.2) Sejah∈ E4 cujok−1-jato ´eY +X2,k≥3. Ak-transversal ´e dada por
Zk. Logo,
o k-jato deh´e VKk−equivalente a Y +X2+λZk, λ∈R.
Suponhamosλ6= 0. Realizando mudan¸cas de coordenadas que preservamV na fonte obte-mos quejkh ´eVK−equivalente a Y +X2±Zk. Temos que
TVKk·jkh=M4hXi+E4
D
Zk−1, Y, WE+Mk4+1.
Logo,jkh´ek−VK-determinado e portantoh´eVK−equivalente aY +X2±Zk.Obtemos assim o germe de Ae−codimens˜ao k, k≥3:
(
(x, y, z2, yz)
(x, x2±yk, y, z).
Para os casos em que o 2-jato ´eY+Z2 ouY+XZ procedemos de maneira an´aloga a (iii.2) e obtemos os seguintes germes deAe-codimens˜aok, com k≥3, respectivamente:
(
(x, y, z2, yz)
(x, y2+xk, y, z) e (
(x, y, z2, yz) (x, xy±xk, y, z).
Os germes cujo 2-jato ´eY s˜ao deVKe-codimens˜ao maior que 4.
(iv) Seja h∈ E4 cujo 1-jato ´eZ. Procedendo como em (iii) obtemos 5 ´orbitas emJ2(4,1): Z±X2±Y2, Z±X2, Z±Y2, Z+XY, Z. Com argumentos an´alogos aos anteriores conclu´ımos que se o 2-jato ´e
(a) Z±X2±Y2, o germe obtido ´e o (6), para k= 1;
(b) Z±X2, o germe obtido ´e o (6), parak >1;
(c) Z±Y2, o germe obtido ´e o (7);
(d) Z+XY, o germe obtido ´e o (8);
(e) Z, os germes obtidos s˜ao deVKe−codimens˜ao maior que 4.
(v) Seja h ∈ E4 cujo 1-jato ´e W. Segue que TVK1·j1h = E4hWi+M24. Pelo Teorema da
Transversal Completa temos quej2h´eVK2−equivalente aW+aX2+bY2+cZ2+dXY+eXZ+
f Y Z.Suponhamosa(4ab−e2)6= 0 e consideremos
Segue do Lema de Mather queSest´a contida numa ´unica ´orbita, cujo representante ´eW+X2± Z2.Os demais casos s˜ao an´alogos, com representantes W +X2±Z2.
Se a(4ab−e2) = 0 obtemos germes de VKe-codimens˜ao maior que 3.
Sejah∈ E4 cujo 2-jato ´e −W +X2±Z2. Temos que
TVK2·j2h=M4hXi+E4W, Y2, Z2, Y Z+M34.
Logo, j2h ´e 2 − VK−determinado. Portanto, h ´e VK−equivalente a W +X2 ± Z2 e tem
VKe−codimens˜ao igual a 3. Desta maneira obtemos o germe de Ae−codimens˜ao 3: (
(x, y, z2, yz) (x, y, z, x2±z2).
✷
Observa¸c˜ao 1.19 Os germes C± obtimos acima s˜ao aumenta¸c˜oes de f : (
(y, z2, yz)
(y, y, z) . De
fato, consideremos o seguinte desdobramentoAe-versal de f,
F :
(
(µ, y, z2, yz)
(µ, y+µ, y, z) .
Ent˜aoC+=A+
f eC−=A−f.
Consideremos agora os bigermes onde um dos ramos ´e o germe de Ae-codimens˜ao 1
A±±3 : (x, y, z2, z(z2±x2±y2)).
Na prova do resultado seguinte obtemos oDerlog(V) paraV a imagem deA++3 .Para os demais,
V eDerlog(V) s˜ao os mesmos a menos de alguns sinais. Como as mudan¸cas de coordenadas na fonte e os espa¸cos tangentes envolvidos na demonstra¸c˜ao do resultado independem destes sinais, a prova ´e v´alida paraA±±3 .
Proposi¸c˜ao 1.20 Seja f : (R3, S) → (R4,0) um bigerme de Ae-codimens˜ao 2 onde um dos
ramos ´eA±±3 : (x, y, z2, z(z2±(x2±y2)). Ent˜aof tem a seguinte forma normal
(
(x, y, z2, z(z2±x2±y2))
(x,0, y, z) .
Demonstra¸c˜ao: SejaV a imagem deA++3 que ´e definida por
1.2 Classifica¸c˜ao de bigermes 25
Ent˜ao
Derlog(V) = (Y,−X,0,0), (0, W, 0, 2X2Y Z+ 2Y3Z+ 2Y Z2), (XY, 3Z+Y2,−4Y Z, 0),
(0,0,2W, X4+ 2X2Y2+Y4+ 4X2Z+ 4Y2Z+ 3Z2),(3Z+X2, XY,−4XZ,0),
(W,0,0,2X3Z+ 2XY2Z+ 2XZ2),(XW, Y W,−4ZW,6Z3+ 6Y2Z2+ 6X2Z2),
(X, Y,2Z,3W)i.
Consideremos a a¸c˜ao deVK1 em J1(4,1).
Sejah∈ E4 e j1h=aX+bY +cZ+dW ∈J1(4,1). Segue que
TVK1·j1h=E4haY −bX, bW, bZ, cW, aZ, aW, aX+bY + 2cZ+ 3dWi+E4
j1h+M24.
Determinemos quais s˜ao as VK1-´orbitas emJ1(4,1).
Seja S = {σ = aX +bY +cZ +dW ∈ J1(4,1); a > 0, a2 +b2 6= 0}. Segue do Lema de
Mather que S est´a contida numa ´unica ´orbita, cujo representante ´e X. Os demais casos s˜ao an´alogos, com representante X. Procedendo desta maneira obtemos as seguintes ´orbitas em
J1(4,1): X, Z, W,0.
(1) Sejah∈ E4 cujo 1-jato ´eX. Segue que
TVK1j1h=E4hX, Y, Z, Wi+M24.
ClaramenteX ´e 1−VK-determinado. Logoh´eVK−equivalente aX e temVKe−codimens˜ao 1.
Pelos Teorema 1.2 e 1.3 obtemos o seguinte germe deAe-codimens˜ao 2: (
(x, y, z2, z(z2±x2±y2))
(0, x, y, z) ∼A
(
(x, y, z2, z(z2±x2±y2))
(x,0, y, z) .
Os germes cujo 1-jato ´eZ, W ou 0 s˜ao de VKe-codimens˜ao maior que 2.
✷
Para finalizar a classifica¸c˜ao dos bigermes consideremos o caso em que um dos ramos ´e o germeR1: (x, y, z3+xz, z4+yz) de Ae-codimens˜ao 1.
Proposi¸c˜ao 1.21 Seja f : (R3, S) → (R4,0) um bigerme de Ae-codimens˜ao 2 onde um dos
ramos ´eR1 : (x, y, z3+xz, z4+yz). Ent˜ao f tem a seguinte forma normal
(
(x, y, z3+xz, z4+yz)
Demonstra¸c˜ao: SejaV a imagem deR1 que ´e definida por
W3−Z4−3Y Z3−3Y2Z2−Y3Z+4XZ2W+5XY ZW+XY2W−2X2W2−X3Y Z+X4W = 0.
Ent˜ao
Derlog(V) = (2X,3Y,3Z,4W), (0, 9Y Z−8XW, 6Y Z+ 3Z2+ 4XW,−2Y W + 4ZW),
(−3Y Z− 3Z2, −4Y W −4ZW, X2Z−3ZW, −3XY Z+ 4X2W −4W2),
(3ZW, 4W2, 2XY Z −XZ2− 2X2W, 3Y2Z+ 3Y Z2−3XY Z−4XZW),
(0,9Y2−72Z2+ 16XW, 18X3+ 39Y Z+ 102Z2−26XW, 22Y W + 64ZW
+18X2Y), (6W, XY −8XZ,−2XY +XZ,−2Y2−10Y Z−8Z2+ 12XW),
(−3Y −3Z,4X2,3W +X2, XY + 4XZ).
Sejah∈ E4 e j1h=aX+bY +cZ+dW ∈J1(4,1). Segue que
TVK1·j1h=E4h2aX+ 3bY + 3cZ+ 4dW, aW, aY +aZ−cWi+E4haX+bY +cZ+dWi+M24.
Suponhamosa(b−c)6= 0 e consideremosS={σ=aX+bY+cZ+dW ∈J1(4,1); a >0, b−c >
0}. Segue do Lema de Mather queSest´a contida numa ´unica ´orbita, cujo representante ´eX+Y. Os demais casos s˜ao an´alogos, com representanteX+Y.
Sejah∈ E4 cujo 1−jato ´eX+Y.Segue que
TVK1·j1h=E4h2X+ 3Y, W, Y +Zi+E4hX+Yi.
Logo,X+Y ´e 1−VK−determinado. Portanto,h´eVK−equivalente aX+Y e temVKe−codimens˜ao
igual a 1. Dos Teoremas 1.2 e 1.3 obtemos o seguinte germe deVKe-codimens˜ao 2 (
(x, y, z3+xz, z4+yz)
(x, x, y, z) .
Os germes cujo 1-jato ´e diferente de X+Y s˜ao deVKe-codimens˜ao maior que 2.
✷