Controle de posição com restrição à orientação de um Veículo Aéreo Não-Tripulado tipo Quadrirrotor
Texto
Imagem
Documentos relacionados
Com isso, o projeto proposto – Desenvolvimento de um Veículo Aéreo Não Tripulado com Arduino – tem como propósito o controle mais fácil e automatizado de um veículo aéreo
Essa tarefa não tem a necessidade de interface com o usuário, tornando-se uma boa candidata ao processamento em lotes, normalmente utilizados como a divisão
Ainda segundo Gil (2002), como a revisão bibliográfica esclarece os pressupostos teóricos que dão fundamentação à pesquisa e às contribuições oferecidas por
Local de realização da avaliação: Centro de Aperfeiçoamento dos Profissionais da Educação - EAPE , endereço : SGAS 907 - Brasília/DF. Estamos à disposição
BARHAM, 1982 (2), define as diferenças conceituais e campos de ação, tanto para en sino como investigação, entre Biomecânica e Cinesiologia Mecânica. Não trataremos
Destaca-se, também, a intensa utilização desse sistema de ensino pelas empresas, o que caracteriza o que se chama de Educação a Distância Corporativa. É visível o
www.kronberg.com.br, encaminhando os documentos indicados no mesmo site, os quais serão analisados no prazo mínimo de 24 (vinte e quatro) horas.. d) A confirmação do cadastro
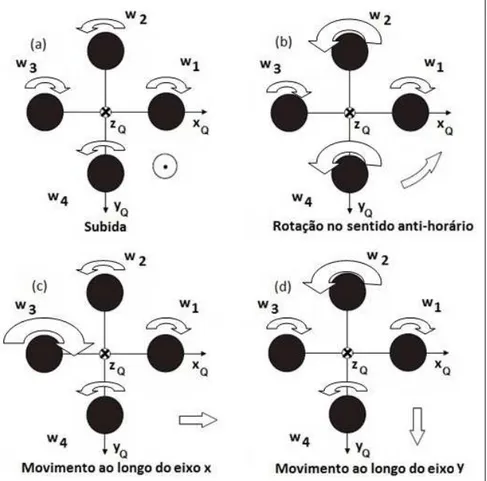
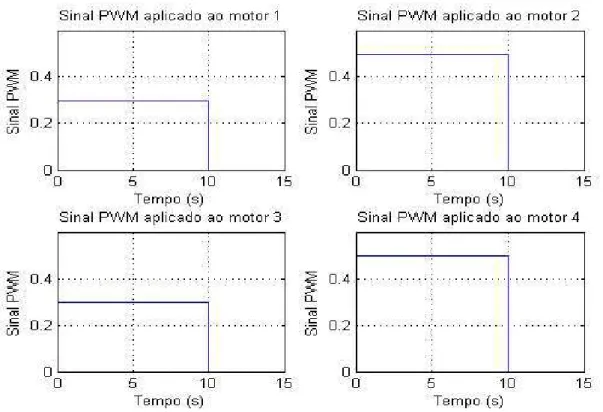
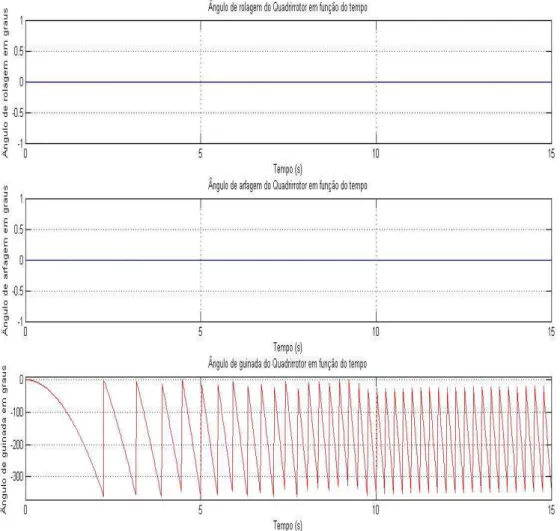
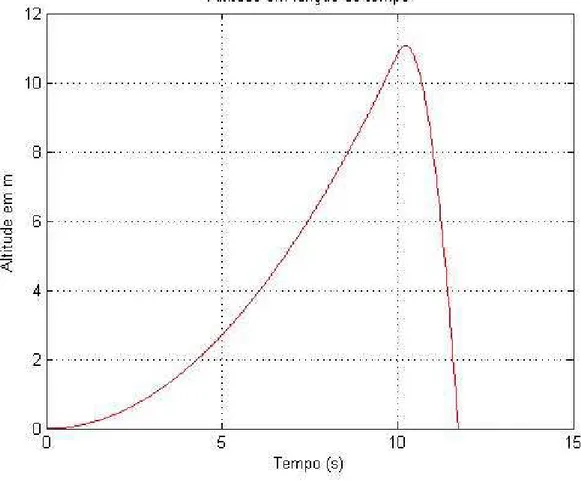
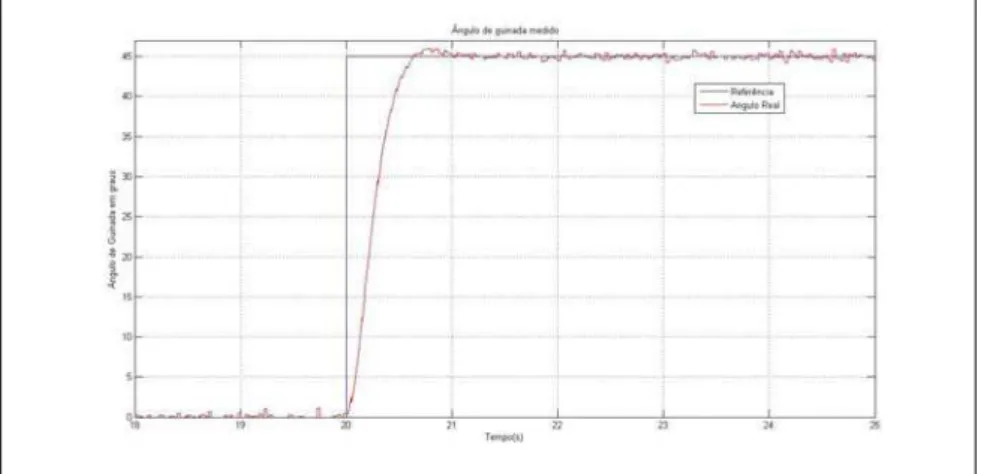
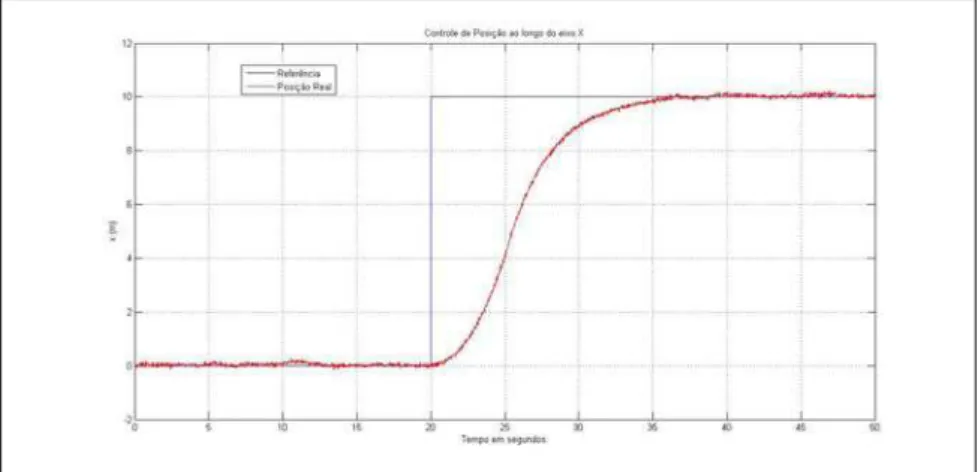
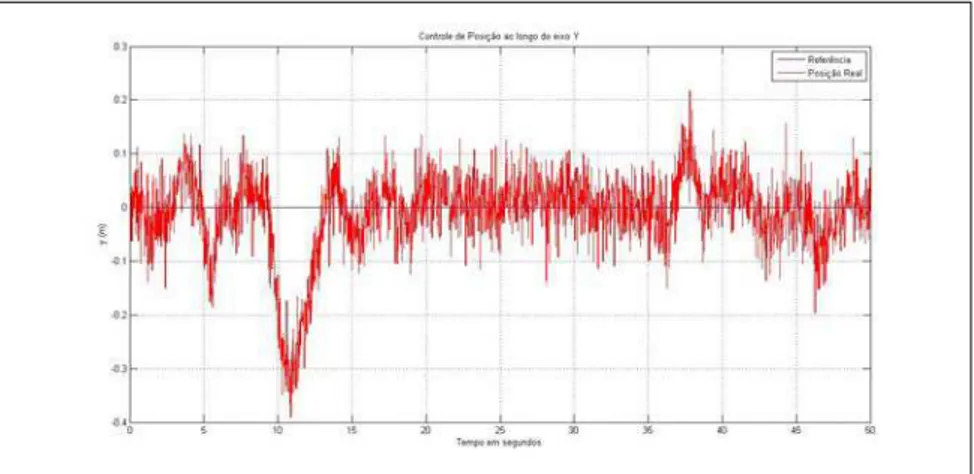
Este trabalho tem como objetivo encontrar um modelo do sistema dinâmico de um VANT, do tipo Quadrirrotor, e a partir dele estudar a aplicação de um controle preditivo multivariável
