UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE
CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Estimação de Fasores para Proteção de
Sistemas Elétricos Baseada em Mínimos
Quadrados e Morfologia Matemática
Diego Alves Formiga
UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE
CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Estimação de Fasores para Proteção de
Sistemas Elétricos Baseada em Mínimos
Quadrados e Morfologia Matemática
Diego Alves Formiga
Orientador: Prof. Dr. Fabiano Fragoso Costa
Coorientador: Prof. Dr. Flavio Bezerra Costa
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenha-ria Elétrica da UFRN (área de concentração: Automação e Sistemas) como parte dos re-quisitos para obtenção do título de Mestre em Ciências.
UFRN / Biblioteca Central Zila Mamede Catalogação da Publicação na Fonte
Formiga, Diego Alves.
Estimação de fasores para proteção de sistemas elétricos baseada em mínimos quadrados e morfologia matemática/ Diego Alves Formiga. - Natal, RN, 2012
116 f.: il.
Orientador: Fabiano Fragoso Costa Co-orientador: Flávio Bezerra Costa
Dissertação (mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. CenCen-tro de Tecnologia. Programa de Pós-Graduação em En-genharia Elétrica e de Computação.
1. Linhas de transmissão - Dissertação. 2. Estimação fasorial - Dissertação. 3. Mínimos quadrados - Dissertação. 4. Morfologia Matemática - Dissertação. 5. Proteção de distância - Dissertação. I. Costa, Fabiano Fragoso de. II. Costa, Flavio Bezerra. III. Universidade Federal do Rio Grande do Norte. IV. Título.
Agradecimentos
À minha família por todo o apoio e carinho em minha vida.
À minha companheira de todas as horas, Aylanna, pelo incentivo nos momentos difíceis
e ajuda na revisão deste trabalho.
Aos meus professores orientadores, Fabiano e Flavio, pelo tempo de dedicação e
contri-buição dedicados a este trabalho.
Aos professores membros da banca examinadora, por terem aceito o convite para
partici-parem desta defesa de mestrado.
Aos demais professores dos cursos de Engenharia Elétrica e da Computação, que contri-buíram direta e indiretamente em minha formação pessoal e acadêmica.
Aos demais colegas da graduação e pós-graduação, pelas críticas e sugestões.
Ao Programa de Pós-graduação em Engenharia Elétrica e Computação da Universidade
Resumo
Propõe-se neste trabalho uma nova técnica de estimação fasorial, a ser utilizada em
relés numéricos microprocessados digitais para proteção de distância de linhas de
trans-missão, baseada no método dos mínimos quadrados recursivo, denominada mínimos qua-drados em caminhada aleatória modificada. Os métodos de estimação fasorial têm seu
desempenho comprometido devido, principalmente, à componente DC de decaimento
ex-ponencial presente nas correntes de falta. Para reduzir a influência da componente DC,
agregou-se ao método de mínimos quadrados um Filtro Morfológico (FM) aplicado
pre-viamente ao processo de estimação fasorial. O método apresentado foi implementado
em ambiente MATLABre o seu desempenho comparado aos métodos convencionais de estimação fasorial, também baseados em mínimos quadrados, e ao algoritmo de
Fou-rier de um ciclo. Os métodos baseados na técnica de mínimos quadrados utilizados para
comparação com o método proposto foram: recursivo ponderado, com reinicialização da covariância e caminhada aleatória. As análises de desempenho das técnicas foram
realiza-das por meio de sinais sintéticos e sinais oriundos de simulações no Alternative Transient
Program (ATP). Em comparação aos demais métodos de estimação fasorial, o método proposto apresentou resultados satisfatórios no que se refere à velocidade de resposta,
os-cilação em regime permanente e percentual de overshoot. Em seguida, o método proposto
teve seu desempenho analisado frente às variações nos parâmetros de falta (resistência,
distância, ângulo de incidência e tipo de falta). Nesse estudo, constatou-se que o método
não sofreu variações significativas em seus resultados. Além disso, analisou-se a
traje-tória da impedância aparente e distância estimada da falta, ao qual o método proposto apresentou melhores resultados em comparação ao algoritmo de Fourier de um ciclo.
Palavras-chave: Estimação fasorial, linhas de transmissão, mínimos quadrados,
Abstract
This work proposes a new technique for phasor estimation applied in microprocessor
numerical relays for distance protection of transmission lines, based on the recursive least
squares method and called least squares modified random walking. The phasor estima-tion methods have compromised their performance, mainly due to the DC exponential
decaying component present in fault currents. In order to reduce the influence of the
DC component, a Morphological Filter (FM) was added to the method of least squares
and previously applied to the process of phasor estimation. The presented method is
im-plemented in MATLABrand its performance is compared to one-cycle Fourier technique and conventional phasor estimation, which was also based on least squares algorithm. The
methods based on least squares technique used for comparison with the proposed method
were: forgetting factor recursive, covariance resetting and random walking. The
tech-niques performance analysis were carried out by means of signals synthetic and signals provided of simulations on the Alternative Transient Program (ATP). When compared to
other phasor estimation methods, the proposed method showed satisfactory results, when
it comes to the estimation speed, the steady state oscillation and the overshoot. Then,
the presented method performance was analyzed by means of variations in the fault
pa-rameters (resistance, distance, angle of incidence and type of fault). Through this study,
the results did not showed significant variations in method performance. Besides, the
ap-parent impedance trajectory and estimated distance of the fault were analysed, and the
presented method showed better results in comparison to one-cycle Fourier algorithm.
Keywords: Phasor estimation, transmission lines, least squares, mathematical
Lista de Figuras
Figura 3.1 - Elementos do sistema de proteção. . . 35
Figura 3.2 - Diagrama R-X. . . 36
Figura 3.3 - Características de operação: a) relé de impedância; b) relé de admi-tância ou mho; c) relé de reaadmi-tância; d) relé quadrilátero. . . 38
Figura 3.4 - Zonas de atuação de Relé de distância com três zonas: (a) Esquema de proteção de um relé de distância com três zonas atuação; (b) Co-ordenação no tempo das zonas de proteção dos relés de distância. . . 40
Figura 3.5 - Fluxograma geral de um relé numérico microprocessado baseado no cálculo da impedância aparente. . . 41
Figura 5.1 - Diagrama de blocos do FM. . . 57
Figura 5.2 - Componente DC extraída do sinal de corrente pelo FM. . . 58
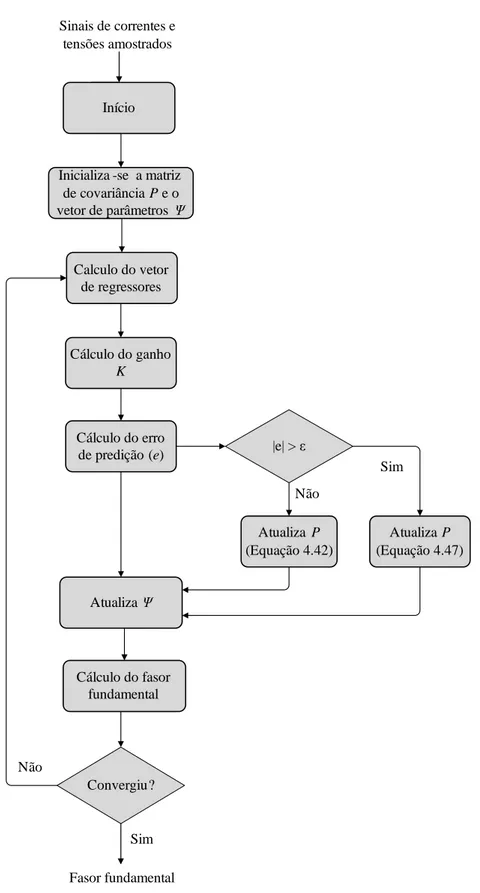
Figura 6.1 - Diagrama de blocos do método proposto. . . 61
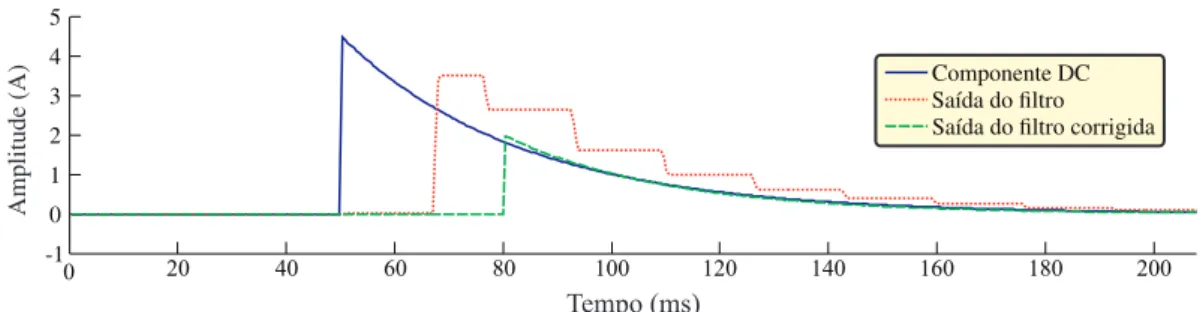
Figura 6.2 - Saída do filtro corrigida. . . 62
Figura 6.3 - Diagrama de blocos do processo de filtragem. . . 62
Figura 7.1 - Sinal sintético. . . 65
Figura 7.2 - Resposta no tempo da estimativa da amplitude do fasor fundamental. 66 Figura 7.3 - Resposta no tempo da estimativa da fase do fasor fundamental. . . 67
LISTA DE FIGURAS
Figura 7.5 - Evolução na estimativa da amplitude para o método MQR-CAM e os
métodos de mínimos quadrados adaptativos . . . 70
Figura 7.6 - Evolução na estimativa da fase para o método MQR-CAM e os
míni-mos quadrados adaptativos. . . 70
Figura 7.7 - Evolução na estimativa da amplitude para o método MQR-CAM e o
Fourier de um ciclo. . . 72
Figura 7.8 - Evolução na estimativa da fase para o método MQR-CAM e o Fourier
de um ciclo. . . 72
Figura 7.9 - Percentual de overshoot: (a) estimativa da amplitude; (b) estimativa
da fase. . . 76
Figura 7.10 - Velocidade de convergência: (a) estimativa da amplitude; (b)
estima-tiva da fase. . . 77
Figura 7.11 - Oscilação na estimação: (a) amplitude; (b) fase. . . 79
Figura 7.12 - Percentual de overshoot: (a) estimativa da amplitude; (b) estimativa
da fase. . . 80
Figura 7.13 - Oscilação na estimativa: (a) estimativa da amplitude; (b) estimativa
da fase. . . 80
Figura 7.14 - Percentual de overshoot: (a) estimativa da amplitude; (b) estimativa
da fase. . . 82
Figura 7.15 - Trajetória da impedância aparente no diagrama R-X para faltas: (a)
AT; (b) AB; (c) ABT; (d) ABC. . . 83
Lista de Tabelas
Tabela 1.1 - Distribuição típica do número de faltas por equipamento
(PAITHAN-KAR; BHIDE, 2010). . . 26
Tabela 3.1 - Classificação das linhas de transmissão. . . 39
Tabela 3.2 - Classificação da falta. . . 42
Tabela 7.1 - Parâmetros do MQR-CAM utilizados nas análises. . . 66
Tabela 7.2 - Resultados obtidos para os quatro modelos analisados. . . 67
Tabela 7.3 - Índices de desempenho para os quatro modelos analisados. . . 67
Tabela 7.4 - Resultados obtidos para os métodos analisados. . . 71
Tabela 7.5 - Índices de desempenho para os métodos analisados. . . 71
Tabela 7.6 - Resultados obtidos para os métodos de Fourier de um ciclo e MQR-CAM. . . 73
Tabela 7.7 - Índices de desempenho para os métodos de Fourier de um ciclo e MQR-CAM. . . 73
Tabela 7.8 - Efeito do ângulo de incidência da falta sob os índices de desempenho. 75 Tabela 7.9 - Efeito da resistência de falta sob os índices de desempenho. . . 78
Tabela 7.10 - Efeito da distância da falta sob os índices de desempenho. . . 81
Tabela 7.11 - Resultado das análises. . . 84
Tabela C.1 - Dados das fontes e equivalentes. . . 107
Lista de Abreviaturas
A/D Analógico/Digital.
ATP Alternative Transient Program.
COMTRADE Common Format for Transient Data Exchange.
DC Direct Current.
EE Elemento Estruturante.
FM Filtro Morfológico.
MATLAB Matrix Laboratory.
MM Morfologia Matemática.
MQR Mínimos Quagrados Recursico.
MQR-CA Mínimos quadrados Recursivo em Caminhada Aleatória.
MQR-CAM Mínimos Quadrados Recursivo em Caminhada Aleatória Modificada.
MQR-RC Mínimos quadrados Recursivo com Reinicialização da Covariância.
MQRP Mínimos quadrados Recursivo Ponderado.
QEE Qualidade da Energia Elétrica.
SEP Sistema Elétrico de Potência.
SIR Source-to-line Impedance Ratio.
TC Transformador de Corrente.
LISTA DE ABREVIATURAS
TP Transformador de Potencial.
Lista de Símbolos
A Matriz contendo os coeficientes do sistema linear
A1 Valor da amplitude do fasor fundamental
Am Estimativa da amplitude do fasor fundamental
E Vetor erro
Eae Ef Erro relativo entre os valores reais e estimado para a ampli-tude e fase, respectivamente
F Erro quadrático
F1,F2e F3 Faltas na linha de transmissão
I Fasor de corrente
ID1,ID2e ID3 Índices de desempenho
I0 Fasor da corrente de sequência zero
Ia,Ibe Ic Fasor das correntes de linha
Imin Limiar de corrente de sequência zero
K Ganho de Kalman
M Matriz composta pelas amostras dos regressores
M+ Matriz pseudo-inversa de M
N Quantidade de amostras em um ciclo do sinal
NT Número de amostras após alcançada a convergência
LISTA DE SÍMBOLOS
Nh Número de componentes harmônicas consideradas na
mode-lagem do sinal
Nconv,Namp,Nf as,Nae Nf Amostra na qual a estimativa do parâmetro convergiu
P Matriz de covariância
R Matriz diagonal
R Resistência
Rabe Rbc Relés de distância
T0 Período fundamental do sinal
V Fasor de tensão
X Reatância
X Vetor coluna contendo as variáveis do sistema linear
Xlinha Reatância de sequência positiva da linha
Y Vetor composto pelas amostras do sinal
Z1 e Z0 Impedâncias de sequência positiva e zero por unidade de comprimento
Zl Impedância total da linha de transmissão
Zs Impedância da fonte
Zs Vetor contendo os instantes em que a matriz de covariância é atualizada
Zap Impedância aparente
Zl1 Impedância de sequência positiva da linha por unidade de comprimento
Zlinha Impedância de sequência positiva da linha
∆t Período de amostragem
LISTA DE SÍMBOLOS
Ψ Vetor dos regressores
α Parâmetro a ser estimado
ˆ
Y Vetor resultante da resolução do sistema linear
ˆ
α Estimativa do parâmetro
ˆ
y Modelo do sinal y
λ Fator de esquecimento
D
f eD
g Domínios das funções f eg, respectivamenteµ Média
ω0 Frequência angular fundamental
φ1,φ2eφp Regressores
ψ1,ψ2eψp Parâmetros a serem determinados
σ Desvio padrão
σ2 Valor dos elementos iniciais da matriz de covariância
τ Constante de tempo
θn Ângulo de fase do fasor
ε Nível preestabelecido do erro de predição
ϕ Ângulo de fase da impedância de sequência positiva da linha
ϕ1 Valor da fase do fasor fundamental
ϕm Estimativa da fase do fasor fundamental
a0,ane bn Coeficientes da série de Fourier
ai Vetor coluna que representa a i-ésima linha da matriz A
c0e cn Coeficientes da série de Fourier em sua forma compacta
LISTA DE SÍMBOLOS
e Erro de predição
f Sinal de entrada do filtro morfológico
f0 Frequência fundamental do sinal
g Elemento estruturante
hce hs Filtros cosseno e seno
i e m I-ésimo e m-ésimo instante de tempo
k Número da amostra
k1,k2e k3 Instantes em que a matriz de covariância é atualizada
m Índice do vetor elemento estruturante
n Ordem da harmônica
n0 Instante de ocorrência da falta
n1e n2 Amostras em que os patamares 1 e 2 estão localizados
q Razão entre as corrente de fase antes e depois da ocorrência da falta
r1,r2e r3 Elementos da matriz R
s Tamanho do elemento estruturante
t Tempo
v Soma dos quadrados dos erros
y Sinal de corrente
yi Componente ímpar do sinal
yp Componente par do sinal
yf mc Saída do filtro morfológico corrigida pela etapa de condicio-namento
LISTA DE SÍMBOLOS
yf s Saída do filtro morfológico
z Multiplicador da matriz identidade
Sumário
1 Introdução 25
1.1 Contextualização do Tema . . . 25
1.2 Motivação . . . 28
1.3 Objetivos . . . 28
1.4 Estrutura do Texto . . . 28
2 Revisão Bibliográfica 31
2.1 Métodos de Estimação Fasorial . . . 31
2.1.1 Transformada Discreta de Fourier . . . 31
2.1.2 Mínimos Quadrados . . . 32
2.1.3 Transformada Wavelet . . . . 33
2.2 Morfologia Matemática . . . 34
3 Fundamentos da Proteção de Distância 35
3.1 O Diagrama R-X . . . 36
3.2 Características de Operação . . . 37
3.3 Zonas de Proteção de Distância . . . 39
3.4 Etapas Básicas da Proteção de Distância . . . 40
3.4.1 Detecção da Falta . . . 41
3.4.2 Classificação da Falta . . . 42
SUMÁRIO
4 Fundamentos da Estimação de Fasores 45
4.1 Algoritmos Baseados na Análise de Fourier . . . 45
4.1.1 Algoritmo Fourier de um Ciclo . . . 46
4.1.2 Algoritmo de Fourier de Meio Ciclo . . . 47
4.2 Algoritmos Baseados nos Métodos dos Mínimos Quadrados . . . 48
4.2.1 Mínimos Quadrados em Batelada . . . 48
4.2.2 Mínimos Quadrados Recursivo . . . 50
4.2.3 Mínimos Quadrados Recursivos Adaptativos . . . 51
4.2.3.1 Fator de Esquecimento . . . 52
4.2.3.2 Reinicialização da Covariância . . . 53
4.2.3.3 Caminhada Aleatória . . . 54
5 Fundamentos da Morfologia Matemática 55
5.1 Operações Básicas . . . 55
5.2 Filtro Morfológico (FM) . . . 56
6 Método Proposto 59
6.1 Método de Estimação Fasorial Proposto . . . 59
6.2 Filtro Morfológico Proposto . . . 60
7 Análise dos Resultados 63
7.1 Índices de Desempenho . . . 63
7.2 Análise Comparativa Quanto ao Modelo do Sinal . . . 64
7.3 Análise de Desempenho dos Métodos de Estimação Fasorial . . . 68
7.3.1 Método MQR-CAM e Mínimos Quadrados não Adaptativos . . . 68
7.3.2 Método MQR-CAM e Mínimos Quadrados Adaptativos . . . 69
SUMÁRIO
7.4 Análise de Sensibilidade do Método Proposto Quanto aos Parâmetros de
Falta . . . 74
7.4.1 Efeito do Ângulo de Incidência da Falta . . . 74
7.4.2 Efeito da Resistência de Falta . . . 76
7.4.3 Efeito da Distância da Falta . . . 79
7.5 Trajetória da Impedância Aparente no Plano R-X . . . 82
8 Conclusões e Propostas para Trabalhos Futuros 85
Referências bibliográficas 87
A Dedução do algoritmo de Fourier 93
A.1 Algoritmo de Fourier de um Ciclo . . . 93
A.2 Algoritmo de Fourier de Meio Ciclo . . . 97
B Dedução do método dos mínimos quadrados 101
B.1 Algoritmo em Batelada . . . 101
B.2 AlgoritmoRecursivo . . . 102
25
Capítulo 1
Introdução
1.1
Contextualização do Tema
Atualmente, devido às normas vigentes do setor elétrico (BRASIL, 2004), é crescente
a necessidade do desenvolvimento de procedimentos técnicos que assegurem robustez e
confiabilidade aos sistemas de transmissão e distribuição de energia elétrica. A expansão
e o aumento da complexidade do setor elétrico tornam o sistema elétrico mais propício
a falhas e levam a uma maior degradação dos índices de Qualidade da Energia Elétrica
(QEE). Portanto, o desenvolvimento de procedimentos de controle e proteção aplicados na
geração, transmissão e distribuição que garantam a QEE ofertada aos clientes do sistema
é de fundamental relevância.
Para que um Sistema Elétrico de Potência Sistema Elétrico de Potência (SEP) opere
adequadamente, as seguintes características devem ser observadas: continuidade,
confor-midade, flexibilidade e manutenabilidade (CAMARGO, 2009). Assim, com o objetivo
de acompanhar o processo de expansão e manter presente a qualidade desejada para
ope-ração de um sistema elétrico, estudos vêm sendo realizados continuamente na área de proteção em busca do desenvolvimento de equipamentos digitais que permitam assegurar
que as faltas sejam extintas rápida e adequadamente. Estas pesquisas têm como propósito
preservar a integridade do SEP e impedir que faltas em um determinado trecho da rede
venha a afetar outros setores do SEP.
As linhas de transmissão são os componentes do sistema elétrico que transportam a
energia produzida pelas fontes de geração até os centros consumidores de energia
elé-trica, sendo os elementos da rede mais suscetíveis a falhas, devido à sua grande extensão
26 CAPÍTULO 1 - INTRODUÇÃO
percentagem de ocorrência de faltas para os diversos componentes do SEP.
Aproximada-mente 50% das faltas ocorrem em linhas aéreas, sendo 85% monofásicas, 8% bifásicas, 5% bifásicas à terra e 2% trifásicas (PAITHANKAR; BHIDE, 2010). No sistema elétrico
brasileiro, as linhas de transmissão correspondem com 68% das ocorrências de falta da
rede (FILHO; MAMEDE, 2011).
Tabela 1.1: Distribuição típica do número de faltas por equipamento (PAITHANKAR; BHIDE, 2010).
Tipo de Equipamento Porcentagem Total (%)
Linhas aéreas 50
Cabos subterrâneos 9
Transformadores e reatores 10
Geradores 7
Disjuntores 12
Equipamentos de controle e transformadores para instrumentos 12
Dentre os equipamentos mais utilizados para a proteção de linhas de transmissão,
destaca-se o relé de distância (PHADKE; THORP, 2009), cujas tarefas básicas atualmente
são: detecção e classificação da falta, cálculo da impedância aparente e distância da falta,
verificação da zona de proteção e caso uma falta seja detectada, o envio de sinal para
abertura dos disjuntores para isolação elétrica da falta envolvida (COURY, 1987).
A primeira tarefa do relé de distância corresponde à detecção da falta por meio da
mudança dos parâmetros de entrada do relé de proteção, que correspondem aos sinais de
corrente e/ou tensão do elemento do sistema elétrico a ser protegido. Em seguida, o
mó-dulo de classificação permite uma rápida identificação das fases em situação de falta, o
que resulta em uma diminuição do tempo de cálculo dos parâmetros utilizados na
locali-zação da falta.
Uma vez que a falta tenha sido detectada e classificada, os parâmetros de tensão e
cor-rente apropriados são selecionados para o cálculo da impedância apacor-rente. A impedância
aparente calculada é utilizada em conjunto com as características de atuação do relé, cuja
análise pode resultar no envio do sinal de comando para abertura de disjuntores se a falta
estiver localizada dentro da zona de proteção.
Em condições de falta, os sinais de corrente e tensão monitorados pelo relé estão
sus-cetíveis às seguintes interferências: componente DC de decaimento exponencial,
CAPÍTULO 1 - INTRODUÇÃO 27
causadas por transformadores de instrumentos, entre outras. A componente DC de
decai-mento exponencial é um eledecai-mento presente nos sinas de corrente de curto-circuito com característica contínua, que decai exponencialmente ao decorrer do tempo e seu valor
de-pende das características do SEP e do local da falta. Portanto, para que um algoritmo de
estimação fasorial esteja apto a operar satisfatoriamente, ele deve ser o menos susceptível
possível às interferências nos sinais analisados.
O cálculo da impedância de falta pode ser realizado por dois tipos de algoritmos:
baseados nos cálculos dos fasores na frequência fundamental ou na resolução de
equa-ções diferenciais que relacionam as grandezas da linha de transmissão (SILVA, 2009). O
primeiro algoritmo é o mais aplicado em relés comerciais (ZIEGLER, 2006), sendo os
algoritmos de estimação fasorial baseados na Transformada Discreta de Fourier (TDF)
mais amplamente utilizados em relés digitais (PHADKE; THORP, 2009).
Os algoritmos de estimação fasorial baseados na TDF são robustos a interferências
harmônicas e ruído branco. Além disso, esses algoritmos são intrinsecamente
adaptati-vos, pois são aplicados a uma janela móvel do sinal. Contudo, a correta aplicação da
TDF depende de determinadas premissas básicas (GIRGIS et al., 1991): o sinal analisado
deve ser estacionário e a frequência de amostragem do sinal deve ser múltipla inteira da
frequência fundamental. No entanto, na prática, os sinais analisados são não
estacioná-rios e essas premissas não são completamente atendidas, o que pode ocasionar cálculos
imprecisos da TDF.
Para desempenhar adequadamente suas funções, um relé de distância requer um
algoritmo que estime rápida e precisamente os fasores de corrente e tensão da linha a ser
protegida. Desta forma, a busca por novos métodos de estimação de fasores que venham
a tornar o sistema de proteção mais robusto e eficaz é de grande relevância ao sistema
elétrico. Dentre as várias alternativas, este trabalho propõe um novo método de estimação
baseado em mínimos quadrados na forma recursiva. Assim, em sua forma padrão,
esta técnica não fornece a adaptabilidade necessária para sua aplicação em proteção de
distância. Entretanto, este trabalho busca investigar algumas técnicas para contornar esta
limitação, de forma a tornar o algoritmo de mínimos quadrados adaptativo e utilizável
na proteção de sistemas elétricos de potência. Com o objetivo de tornar a técnica mais robusta em relação ao decaimento exponencial, investiga-se a utilização de um filtro não
28 CAPÍTULO 1 - INTRODUÇÃO
1.2
Motivação
No sistema elétrico de transmissão, destacam-se entre os índices de QEE a frequência
e o tempo de indisponibilidade do fornecimento de energia elétrica. O descumprimento
das metas de qualidade estabelecidas pelos órgãos regulamentadores provoca diminuição
de receita das concessionárias. Portanto, é de fundamental importância a presença de um
sistema de proteção eficiente e robusto que minimize os riscos provenientes de ocorrências de falta na rede. Dentro deste sistema de proteção, destaca-se a necessidade da proteção
de distância, cuja boa atuação diminui o tempo de reparo, garantindo desta forma um
restabelecimento mais rápido às condições normais de operação do SEP.
O uso da estimação fasorial é amplamente utilizado em sistemas de localização de
faltas em linhas de transmissão. Desta forma, este tema tem gerado grande interesse por
parte de pesquisadores e concessionárias de energia elétrica, cujo objetivo consiste em desenvolver algoritmos de estimação fasorial mais precisos e confiáveis.
1.3
Objetivos
O objetivo deste trabalho é apresentar uma técnica de estimação fasorial que possa ser
implementada em um relé numérico microprocessado de proteção de linha de
transmis-são. O método proposto tem como base as teorias de mínimos quadrados e morfologia
matemática, sendo esta responsável pela redução da interferência da componente DC de
decaimento exponencial na estimação fundamental.
Neste trabalho, a técnica proposta será comparada ao algoritmo de Fourier e a outros
métodos também baseados em mínimos quadrados. Seu desempenho será avaliado por
meio de sinais sintéticos e sinais provenientes da modelagem de um sistema elétrico no
Alternative Transient Program (ATP). Além disso, será analisada a sensibilidade do al-goritmo proposto à variações dos parâmetros de falta: resistência, distância e ângulo de
incidência de falta. O método proposto e o algoritmo de Fourier de um ciclo terão seus
desempenhos analisados quanto à precisão e rapidez na estimação da distância de falta.
1.4
Estrutura do Texto
Esta dissertação de mestrado inicia-se com um capítulo introdutório, em que são
CAPÍTULO 1 - INTRODUÇÃO 29
No capítulo dois é abordada a revisão bibliográfica concernente à estimação de fasores e
morfologia matemática.
No terceiro capítulo são abordados os fundamentos da proteção de distância de linhas
de transmissão em sistemas elétricos de potência, sendo apresentados o diagrama R-X,
os tipos de relé de distância e as zonas de proteção de distância usualmente utilizadas. O
capítulo quatro desenvolve uma explanação a respeito dos métodos de estimação fasorial:
algoritmos de Fourier e métodos dos mínimos quadrados. O quinto capítulo aborta a fundamentação teórica da morfologia matemática e do FM.
No capítulo seis, apresenta-se um novo método de estimação fasorial, cujos princípios
se baseiam na teoria dos mínimos quadrados. Além disso, destaca-se a proposição de
uma modificação a ser aplicada ao FM que é utilizado no tratamento prévio dos sinais de corrente.
O sétimo capítulo inicia-se com a apresentação e definição dos índices de
desempe-nho utilizados para avaliar e comparar os métodos de estimação fasorial estudados nesta
dissertação. Além disso, este capítulo também trata da análise dos resultados obtidos
du-rante a execução deste trabalho. Os métodos de estimação fasorial têm seus desempenhos avaliados por meio de sinais analíticos e sinais oriundos de simulações de um sistema
simplificado de transmissão de energia elétrica no software ATP.
No capítulo oito são apresentadas as conclusões concernentes aos métodos de
esti-mação fasorial discutidos nesta dissertação de mestrado, bem como o comportamento do método proposto frente aos critérios analisados. O Apêndice A apresenta as deduções
matemáticas dos algoritmos de Fourier de um e meio ciclo, enquanto que o Apêndice B
apresenta as técnicas baseadas no método de mínimos quadrados em suas formas
bate-lada e recursiva. No Apêndice C são apresentadas as características do sistema elétrico
31
Capítulo 2
Revisão Bibliográfica
A seguir é feito um levantamento sobre o estado da arte dos principais métodos
uti-lizados para estimação fasorial no contexto de proteção de distância, além de referências
sobre aplicações da morfologia matemática na filtragem da componente DC de
decai-mento exponencial.
2.1
Métodos de Estimação Fasorial
Os principais artigos científicos sobre métodos de estimação fasorial com base nas técnicas da TDF, mínimos quadrados e da Transformada Wavelet (TW) são discutidos
abaixo.
2.1.1
Transformada Discreta de Fourier
A TDF é o método mais utilizado pelos relés de proteção de distância para estimar
fasores em linhas de transmissão (PHADKE; THORP, 2009). Entretanto, esta técnica
está sujeita a erros, devido à componente DC de decaimento exponencial presente nas
correntes de falta (CHO et al., 2009). Para contornar este problema, trabalhos vêm sendo
desenvolvidos para atenuar ou eliminar a influência da componente DC durante a estima-ção dos fasores.
O algoritmo de Fourier de um ciclo é um dos algoritmos mais comumente utilizado para estimação de componentes fundamentais (YU, 2006). Sua denominação refere-se
à utilização de uma janela de dados com duração de um ciclo de amostras dos sinais de
tensão e corrente. Entre os primeiros trabalhos que fazem uso desta técnica, destacam-se
32 CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA
Phadke et al., (1976), propuseram a utilização de uma janela de duração de apenas meio
ciclo, intitulada de algoritmo de Fourier de meio ciclo. Os trabalhos analisados que abor-dam esta técnica demonstram que, embora a resposta tenha sido obtida mais rapiabor-damente,
os resultados ainda são bastante sujeitos a erros, em decorrência da presença da
compo-nente DC, além dos harmônicos pares (SACHDEV; NAGPAL, 1991; ARGüELLES et al.,
2005).
Com o objetivo de atenuar o efeito da componente DC na estimação fasorial, os
tra-balhos baseados no algoritmo básico de Fourier tentam reduzir os erros da estimação de
fasores por meio da correção do fasor com base no erro de saída da TDF (GU; YU, 2000;
SIDHU et al., 2003; GUO et al., 2003; KANG et al., 2009), introdução de filtros mímicos
invariantes (BENMOUYAL, 1995) ou adaptativos (YU, 2007), que buscam filtrar a com-ponente DC sem calculá-la explicitamente. Essas estratégias apresentam bons resultados
se o expoente do decaimento já for conhecido. Outros algoritmos melhoram o
desem-penho da TDF por meio da estimação direta da componente DC exponencial e de sua
extração dos sinais a serem analisados, como em e Gu et al. (2006), porém é necessário
algumas amostras dos sinal, o que retarda o início da estimação fasorial.
2.1.2
Mínimos Quadrados
A técnica de mínimos quadrados foi utilizada inicialmente na estimação fasorial por
Sachdev & Baribeau (1979) e Isaksson (1988). Em essência, o algoritmo de mínimos
quadrados é um ajuste de curva, em que a métrica é a soma dos erros quadráticos entre
as amostras do sinal e do seu modelo. No algoritmo em batelada, podem ser utilizados
algoritmos de um ciclo (ROSOLOWSKI et al., 2001) ou meio ciclo (YU, 2006). Uma
maneira de aumentar a velocidade de convergência destes algoritmos é a utilização de janelas de tamanho variável (JAFARIAN; SANAYE-PASAND, 2009). Uma versão
recursiva do algoritmo de mínimos quadrados foi proposta em Sachdev & Nagpal (1991).
A utilização de técnicas recursivas é uma alternativa segura aos métodos baseados em
Fourier, pois podem ser igualmente robustas com baixo custo computacional, além de
apresentarem uma rápida convergência (SACHDEV; NAGPAL, 1991). Nesta situação,
a estimativa do fasor é atualizada a cada amostra do sinal. Por outro lado, algoritmos recursivos não são naturalmente adaptativos, já que todas as amostras passadas do sinal
influem na estimativa atual dos parâmetros de interesse. Isso implica em uma resposta
lenta a mudanças nos parâmetros estimados. Se os parâmetros do sinal são variantes no
CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA 33
técnicas que tentam aperfeiçoar os mínimos quadrados na forma recursiva manipulam a
norma da matriz de covariância a partir do disparo do algoritmo (SALCIC et al., 2006; COLMAN; WELLS, 2006; WILLIAMSON, 1995).
Dentre algumas maneiras de realizar este procedimento, uma delas utiliza o Fator de
Esquecimento (ÅSTRöM; WITTENMARK, 1989), em que amostras recentes possuem
um peso maior em relação às amostras antigas. Outra proposta é o uso da Reinicialização
da Matriz de Covariância (ALMEIDA; LIMA, 1998), que ajusta os elementos da mesma
para elevar o ganho do algoritmo, de forma a melhorar a taxa de convergência. Por fim, outra técnica, denominada Caminhada Aleatória (HAGGLUND, 1983; SöDERSTRöN;
STOICA, 1989), também pode ser empregada para evitar o decaimento do traço da matriz
de covariância.
Outro aspecto importante da utilização de técnicas de mínimos quadrados na forma
recursiva é a possibilidade de modelar mais adequadamente a componente DC de
decai-mento exponencial. Isso pode ser realizado, por exemplo, pela adição de regressores ao modelo do sinal que emulam o efeito da exponencial. Esses regressores podem ser
calcu-lados por meio de uma expansão de Taylor como proposto em Sachdev & Nagpal (1991),
que utilizou os primeiros dois termos desta expansão. Posteriormente, uma expansão de
um termo, ou seja, apenas a componente DC aproximando a exponencial, foi apresentada
em Williamson (1995) com resultados satisfatórios. Em relação aos distúrbios
harmôni-cos, pode-se afirmar que o desempenho da técnica de mínimos quadrados é robusta se os
harmônicos forem previstos no modelo do sinal. Uma versão estocástica do método de
mínimos quadrados na forma recursiva é o conhecido filtro de Kalman (COSTA et al.,
2004; SACHDEV et al., 1985).
2.1.3
Transformada Wavelet
A TW foi utilizada para a estimação de fasores primeiramente por WONG et al.,
(2001). Os autores avaliaram o algoritmo considerando janelas de dados de um e de meio
ciclo e os resultados indicam que, em alguns casos, seu desempenho é superior ao do
algoritmo de Fourier de um ciclo. No entanto, esta técnica é afetada pela componente DC
de decaimento exponencial e não elimina as harmônicas.
Alguns trabalhos utilizam a versão contínua da transformada (COSTA et al., 2004),
mas as versões discretas são mais adequadas para aplicações em tempo real. Nestes
traba-lhos, a transformada wavelet é utilizada como um filtro para tratar o sinal antes de algum
34 CAPÍTULO 2 - REVISÃO BIBLIOGRÁFICA
de abordagem podem ser encontrados em Osman & Malik (2004) e Koglin et al. (1999).
Em Silva et al. (2008), uma combinação da TW com o algoritmo de mínimos
quadra-dos foi proposta, no entanto é influenciada pela componente DC. Deve-se salientar que,
neste caso, a TW é utilizada em um ciclo de amostras do sinal. Posteriormente em Silva
& Küsel (2011) apresenta-se um filtro mímico adaptativo com o objetivo de estimar a
componente DC. Em Silva & Küsel (2012) aplicam o filtro mímico adaptativo ao método
apresentado em Silva et al. (2008), apresentando bons resultados.
2.2
Morfologia Matemática
A Morfologia Matemática foi desenvolvida para análise de imagens binárias (SERRA,
1982; MATHERON, 1975) e posteriormente estendida para imagens em escala de cinza
e coloridas, objetivando extrair da imagem analisada características relevantes.
Em processamento de sinais, a MM é utilizada para a extração de componentes da
forma de onda. Em Chu & Delp (1989), a MM é utilizada no desenvolvimento de um FM
com o objetivo de suprimir ruídos em sinais de eletrocardiograma. Uma adaptação deste
filtro é sugerida com o objetivo de remover a componente DC de decaimento exponencial
35
Capítulo 3
Fundamentos da Proteção de Distância
O sistema de proteção corresponde a um conjunto de equipamentos elétricos -
trans-dutores, relés, baterias e disjuntores - responsáveis pela detecção e remoção de faltas que
venham a ocorrer na rede (HOROWITZ; PHADKE, 2008). Na Figura 3.1 são ilustrados
os principais elementos do sistema de proteção.
Disjuntor
TP
dž
Relé
Bateria TC
Figura 3.1: Elementos do sistema de proteção.
As proteções usualmente utilizadas em linhas de transmissão são (FILHO;
MA-MEDE, 2011): proteção de distância, proteção contra subtensão, proteção direcional,
proteção de sobrecorrente, proteção contra sobretensão, proteção diferencial de linha e
proteção de falha de disjuntor. Dentre estes esquemas de proteção, destaca-se a proteção
de distância, responsável por determinar a distância do local de instalação do relé até o
ponto de falta. Este parâmetro é obtido indiretamente a partir da medição da impedância
de sequência positiva do trecho da linha entre o relé e o local da falta (ZIEGLER, 2006). Sua presença é de considerável importância devido ao fato de que as linhas de
transmissão possuírem grandes extensões e, normalmente, situarem-se em regiões de
36 CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA
Em um sistema elétrico de transmissão, a localização do ponto de falta é fundamental,
quer seja a falta permanente ou temporária. Em caso de faltas permanentes, a proteção de distância é necessária para que o tempo de deslocamento da equipe de manutenção
até o local defeituoso do sistema seja reduzido, de forma que o elemento ou trecho
defeituoso seja restabelecido o quanto antes às condições normais de operação. A
localização de faltas temporárias é relevante para que sejam identificados os pontos da
rede que necessitem passar por manutenção ou reforço, evitando problemas de maior
complexidade no futuro.
A seguir, serão apresentados alguns conceitos importantes da proteção de distância,
necessários para o desenvolvimento deste trabalho.
3.1
O Diagrama R-X
Em proteção de distância, analisar a resposta do relé para todas as condições é um
processo complexo, pois as características das correntes e tensões variam em diferentes
condições de falta e do sistema. Como alternativa, é comum o uso do diagrama R-X para
analisar e visualizar a resposta do relé e do sistema.
Na Figura 3.2 é apresentado o diagrama R-X, desenhado em um plano cartesiano composto por duas variáveis: o eixo das abscissas representa a resistência R e o eixo das
ordenadas define a reatância X . A variável Zlinha corresponde à impedância de sequência
positiva da linha em que o relé de distância está instalado.
Zlinha
R X
φ
0
Opera
Não opera
CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA 37
A relação entre os fasores de tensão e corrente (V/I) medidos pelo relé é conhecida
como impedância aparente, que representa a "impedância vista" pelo relé. A partir dessa impedância, a resistência R e a reatância X podem ser obtidas, em que R e X
correspon-dem, respectivamente, à parte real e imaginária da impedância de falta.
O valor da impedância aparente nem sempre estará contido sobre a representação da
própria linha. Portanto, para incorporá várias imprecisões decorrentes dos transdutores
e dos cálculos do próprio relé, bem como devido à resistência de falta, é necessário
de-finir uma região de falta no diagrama R-X com uma área substancial envolvendo a linha (COURY et al., 2007). O relé deve operar caso a impedância aparente esteja dentro de
sua característica de operação, que consiste de uma figura geométrica no plano R-X.
3.2
Características de Operação
Existem relés de distância com características operacionais diferentes e adequadas a
determinadas aplicações. Os relés de distância podem ser classificados de acordo com o
formato de suas zonas de operação. Tradicionalmente, os formatos das zonas de operação
tem sido circulares devido aos relés eletromecânicos, cujas equações de torque produzem
uma vizinhança circular para as zonas de operação. No entanto, formas de zonas bem
mais complexas podem ser alcançadas com relés numéricos microprocessados. Quatro tipos de características gerais são reconhecidos de acordo com as formas das suas zonas
de operação (HOROWITZ; PHADKE, 2008): impedância, admitância ou mho, reatância
e quadrilátero, tais como ilustrados na Figura 3.3.
De acordo com a Figura 3.3, O diagrama R-X do relé de impedância possui um
for-mato circular centrado na origem do diagrama R-X. No relé de admitância (mho), o
di-agrama tem um formato circular que passa na origem. No relé de reatância, o didi-agrama apresenta um limite de zona definido por uma linha paralela ao eixo R. A zona se estende
para o infinito em três direções. A característica do relé quadrilátero é definida por quatro
linhas retas. Formatos mais complexos podem ser obtidos usando um ou mais tipos dos
relés mostrados na Figura 3.3.
A escolha do tipo de relé de distância está condicionada à característica do sistema no qual irá operar. Os relés de reatância são mais indicados para a proteção de linhas
de transmissão consideradas curtas, em que a resistência de arco possa atingir um valor
significativo quando comparado com a impedância da linha de transmissão. por outro
con-38 CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA
Zlin
ha
Opera Não opera
R X
0
(a)
Zlin
ha
Opera Não opera
R X
0
(b)
R X
0
Não opera
Opera
Xlinha
(c)
R X
0
Não opera
Opera
Zl i
nha
(d)
Figura 3.3: Características de operação: a) relé de impedância; b) relé de admitância ou mho; c) relé de reatância; d) relé quadrilátero.
sideradas longas, já que sua característica operacional ocupa menor espaço no diagrama
R-X, o que os torna menos sensíveis às oscilações indesejáveis de potência. Mesmo para resistência de arco elevada, não há restrição quanto a sua aplicação em linhas de
trans-missão longa, pois a impedância da linha é muito superior à resistência de arco. Os relés
de impedância são indicados na proteção de linhas de transmissão médias, devido à sua
característica operacional ser mais afetada pela resistência de arco em comparação ao relé
de admitância (FILHO; MAMEDE, 2011).
As linhas de transmissão podem ser classificadas em curta, média e longa a partir da
relação entre a impedância da fonte e a impedância da linha (Source-to-line Impedance Ratio (SIR)). A SIR é calculada como segue (IEEE, 2011; ONS, 2011):
SIR= Zs
Zl
CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA 39
em que Zs corresponde a impedância da fonte e Zl representa a impedância total da
linha de transmissão. A classificação da linha de transmissão a partir do valor da SIR é sumarizada na Tabela 3.1 (IEEE, 2011).
Tabela 3.1: Classificação das linhas de transmissão.
Classificação SIR Curta >4 Média 0,5<SIR≤4 Longa ≤0,5
3.3
Zonas de Proteção de Distância
O desempenho do relé de distância próximo às suas zonas limites não é previsível devido a erros causados pela resistência de falta e por imprecisões decorrentes dos
trans-dutores e dos cálculos do próprio relé. Consequentemente, torna-se necessário o uso de
múltiplas zonas de proteção para cobrir o total da linha. Geralmente, três zonas de
pro-teção com diferentes alcances, associados a diferentes tempos de atraso, são utilizadas na
operação do relé de distância. No entanto, dependendo da aplicação, mais zonas podem
ser consideradas (ZIEGLER, 2006).
Na Figura 3.4 são apresentados os limites das zonas de proteção utilizados em um
trecho de um sistema de transmissão e seus respectivos tempos de atraso, em que Rab e
Rbc são relés de distância. Na figura também são apresentados o local de ocorrência de três faltas, denominadas F1, F2e F3.
No exemplo da Figura 3.4, a zona de proteção 1 do relé Rab é ajustada para alcançar
entre 85% e 90% do comprimento da linha AB. Isso se deve à incerteza ao fim da zona de proteção, para que haja a garantia de que o relé não atue instantaneamente para faltas após
o próximo terminal. Para a falta F1, o relé Rab atuará em primeira zona, sem tempo de
atraso intencional. Como a primeira zona de Rab não protege toda a linha de transmissão
AB, é necessária uma segunda zona que deliberadamente ultrapasse o próximo terminal
(zona 2).
A segunda zona do relé Rabgeralmente é ajustada entre 120% a 150% do comprimento da linha AB, devendo ser coordenada em atraso, entre 0,4 e 0,8 s, em relação à primeira
zona do relé do trecho BC, para assegurar que faltas na primeira zona do relé Rbc, tal
como a falta F2, não seja vista em segunda zona pelo relé Rab, garantindo que Rabsó atue
40 CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA
C B
Zona 1 -✁
✂ Tempo Distância ✄ ☎ ✆ ✝ ✞ ✟ A
Zona 2 -✁
✂
Zona 3 -✠
✡☛
Zona 1 -✁
✂☞
Zona 2 -✁
✂ ☞ ✌ ✍✎ ✏ ✑✒ ✓✔ ✕ ✖✗
A B C
✘✙✚ ✛✜ ✢ ✣ ✢ ✤ ✥ ✦ ✧★✩ ✪✫ ✬ ✍✎ ✭ ✮✯ (a) (b)
Figura 3.4: Zonas de atuação de Relé de distância com três zonas: (a) Esquema de prote-ção de um relé de distância com três zonas atuaprote-ção; (b) Coordenaprote-ção no tempo das zonas de proteção dos relés de distância.
A segunda zona do relé Rab resguarda um trecho da linha a jusante. Portanto, para
que toda esta linha tenha uma proteção de retaguarda, é necessário ter uma terceira zona
de proteção, que usualmente se estende de 120% a 180% do trecho BC. Esta zona deve
coordenar em tempo e distância com a segunda zona dos relés vizinhos. Tipicamente, a terceira zona opera em atraso de 0,8 a 1,2 s. Portanto, para a falta F3na Figura 3.4, o relé
Rab só atuará em terceira zona, caso o relé Rbcvenha a falhar.
Uma quarta zona de proteção pode ser utilizada na operação do relé de distância.
Porém esta zona de proteção tem a sua supervisão voltada para o sentido contrário das
de-mais proteções do sistema elétrico. Portanto, a proteção de quarta zona deve ser sensível
aos defeitos a montante, considerando a barra em que está instalado o relé de distância.
Tipicamente, sua operação é retardada entre 1,0 e 1,5 s (FILHO; MAMEDE, 2011).
3.4
Etapas Básicas da Proteção de Distância
As etapas básicas de um relé de distância podem ser divididas em: detecção e
classifi-cação da falta, cálculo da impedância aparente e distância da falta, verificlassifi-cação da zona de proteção e, caso uma falta seja detectada, o envio de sinal para abertura dos disjuntores
para isolação elétrica da falta envolvida (COURY, 1987).
O fluxograma geral de um relé de distância baseado na estimação fasorial é
apresen-tado na Figura 3.5. Primeiramente, os sinais de corrente em um dos terminais da linha de
CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA 41
e de Potencial (TP). Em seguida, os sinais analógicos são filtrados por filtros passa-baixa
para minimizar o efeito do aliasing e evitar erros na digitalização dos sinais de tensão e corrente por um conversor Analógico/Digital (A/D). Geralmente, os filtros aliasing têm
sua frequência de corte ajustada no máximo em metade da frequência de amostragem dos
conversores A/D (COURY et al., 2007). O cálculo da impedância deve, necessariamente,
utilizar a informação do tipo de falta e dos fasores de tensão e corrente.
Filtro anti -aliasing
Detecção da falta
Classificação da falta
Cálculo da impedância aparente/distância
Decisão de abertura dos disjuntores
✰✱✲✳✱✴✳✲✳✵✶✷✱✸✹✴ ✺✻✼✻✲✴✽✻✴✻
✸✹✾✾✻✲✼✻ ✴
Conversor A/D
✰✱✲✳✱✴✿ ✱✵ ✼✾ ✳✺✹ ✴
❀❁✹ ✴✼✾ ✳✴✺✹✴ ✴✱✲✳✱✴✺ ✻✼✻✲✴❂✹
✻✸✹✾✾✻✲✼✻✴
Estimação fasorial
❃✳✴✹✾✻ ✴ ❃✳✴✹✾✻ ✴
❄ ✱❅✹✺✳✿ ✳✵ ✼✳
Figura 3.5: Fluxograma geral de um relé numérico microprocessado baseado no cálculo da impedância aparente.
3.4.1
Detecção da Falta
Uma falta no sistema elétrico pode ser detectada de várias maneiras e, geralmente, está associada à mudança dos sinais de corrente e/ou tensão (COURY et al., 2007). A
seguir são comentados três diferentes métodos de detecção de faltas.
Em um dos principais métodos de detecção, a amostra mais recente das correntes de
cada fase é comparada com a amostra correspondente do ciclo anterior. Caso haja uma
alteração "significativa", geralmente de no mínimo 0,06 pu, entre as amostras de qualquer
fase, a falta é detectada. Esse resultado necessita de uma confirmação, que é executada
durante quatro amostras consecutivas. Para a implementação deste método de detecção é necessário armazenar dois ciclos de amostras das corrente (COURY et al., 2007).
A estimação de fasores é utilizada em outro método de detecção para a estimação de
42 CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA
atuais, caso as amostras que tiveram seu valor estimado apresente substanciais diferenças
em relação aos valores estimadas, a falta é detectada (COURY et al., 2007).
Um terceiro método retifica os sinais de corrente e tensão, atribuindo-se valor unitário
para variações positivas e zero para variações negativas em módulo. Em condições
nor-mais de operação, os sinais de corrente e tensão são praticamente senoidais e os períodos
das variações positivas e negativas são iguais. Caso os períodos de variações venham a
ser diferentes, o sistema encontra-se em condições de falta. Para todos esses métodos, a
detecção da falta acontece em poucas amostras de pós-falta (COURY et al., 2007).
3.4.2
Classificação da Falta
A classificação da falta permite uma rápida identificação das fases em falta, uma
di-minuição no tempo de cálculo da impedância aparente e, consequentemente, localização
da falta e incorporação do histórico de faltas de um referido sistema elétrico.
O método de classificação de falta discutido a seguir utiliza os fasores da corrente
das três fases, nos quais os fasores das correntes de linha (bIa, bIb ebIc) e a componente de sequência zero (bI0) são comparados. Ib0 é necessária para determinar se a falta envolve ou não a terra, pois a magnitude da componente de sequência zero cresce para faltas
envolvendo a terra. As faltas são classificadas de acordo com o Tabela 3.2 (COURY et al., 2007).
Tabela 3.2: Classificação da falta.
Condição Falta do tipo
Ib<qIa e Ic<qIa AT
Ia<qIb e Ic<qIb BT
Ia<qIc e Ib<qIc CT
Ic<qIa e Ib≈Iae I0>Imin ABT
I0<Imin AB
Ia<qIb e Ic≈Ibe
I0>Imin BCT
I0<Imin BC
Ib<qIa e Ia≈Ice
I0>Imin ACT
I0<Imin AC
Ia≈Ib≈Ic ABC
O parâmetro q é a razão entre as correntes de fase antes e depois da ocorrência da
falta, e depende da configuração do sistema. O valor de 0,3 para q fornece uma correta
CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA 43
limiar para a componente de sequência zero, necessário devido à existência de linhas não
balanceadas, erros nos transdutores e no próprio método de estimação fasorial.
3.4.3
Cálculo da Impedância Aparente e da Distância da Falta
O cálculo da impedância aparente é realizado pelo algoritmo implementado no relé de
proteção de distância após a detecção e classificação da falta. Como a estimação fasorial
para obtenção das componentes fundamentais dos sinais de corrente e tensão é utilizado
pelo relé, os fasores de tensão e corrente apropriados são selecionados para o cálculo da
impedância aparente conforme a classificação da falta. A impedância aparente é calculada
de forma distinta para diferentes tipos de falta (LEWIS; TIPPETT, 1947; HOROWITZ, 1980).
A impedância aparente para uma falta monofásica a terra é calculada por:
Zap=
b
Vi b
Ii+
Z0−Z1
Z1
b
I0
, (3.2)
em queVbi ebIi são os fasores de tensão e corrente da fase em falta,bI0 é o fasor da com-ponente de sequência zero. As impedâncias Z1 e Z0 representam, respectivamente, a
impedância de sequência positiva e zero da linha de transmissão por unidade de
compri-mento. Para faltas bifásica que envolvam ou não a terra, o cálculo da impedância aparente
é obtido por meio de:
Zap = b
Vj−Vbk b
Ij−bIk
, (3.3)
em queVbj,Vbk,bIj ebIk representam os fasores de tensão e corrente das fases em falta. Na ocorrência de faltas trifásicas, ambas as Equações 3.2 e 3.3 podem ser utilizadas para o
cálculo da impedância aparente.
A impedância aparente medida pelo relé de distância corresponde à impedância de
sequência positiva do trecho da linha de transmissão, entre o ponto de instalação do relé
até o local da falta. Desta forma, como a impedância de sequência positiva da linha de
transmissão por unidade de comprimento (Zl1) é praticamente constante, possibilitando
determinar a distância da falta a partir do ponto de instalação do relé, como segue:
44 CAPÍTULO 3 - FUNDAMENTOS DA PROTEÇÃO DE DISTÂNCIA
em que Zap corresponde a impedância medida pelo relé de distância, Zl1 é expressa em Ω/km e h representa a distância da falta.
Após o cálculo da impedância aparente e, consequentemente, da distância da falta,
o algoritmo do relé determina a zona de proteção em que a falta se encontra. Caso a
impedância aparente se localize dentro da primeira zona de proteção, o relé atuará
instan-tâneamente. Entretanto, se a impedância se localizar a partir da segunda zona de proteção,
45
Capítulo 4
Fundamentos da Estimação de Fasores
A estimação de fasores representa uma etapa importante na proteção de distância
exe-cutada por relés de distância e deve ser rápida e precisa, mesmo quando os sinais
analisa-dos apresentem interferências.
Os algoritmos tradicionalmente empregados para estimar fasores são baseados na
Transformada de Fourier, podendo ser de um ciclo ou de meio ciclo. No entanto, téc-nicas de ajuste de curvas, tal como o método dos mínimos quadrados, também podem
ser utilizadas na estimação de fasores. Neste capítulo, é apresentada a fundamentação
matemática desses algoritmos, bem como o uso de técnicas recursivas e adaptativas.
4.1
Algoritmos Baseados na Análise de Fourier
Um sinal periódico y(t)pode ser representado como a soma de senóides (ou exponen-ciais) da série de Fourier (LATHI, 2007):
y(t) =a0+ ∞
∑
n=1[ancos(nω0t) +bnsin(nω0t)], (4.1)
em queω0é a frequência angular fundamental; ane bnsão as amplitudes e n representa a
ordem da harmônica do sinal y(t).
Os coeficientes da série de Fourier são determinados por:
a0= 1 T0
Z
T0
y(t)dt, (4.2)
an= 2 T0
Z
T0
46 CAPÍTULO 4 - FUNDAMENTOS DA ESTIMAÇÃO DE FASORES
bn= 2 T0
Z
T0
y(t)sen(nω0t)dt, (4.4)
em que RT0 representa a integração em um período T0, sendo T0 o inverso da frequência fundamental do sinal y(t), também denominado de período fundamental. No Apêndice A encontra-se a dedução matemática das equações que permitem o cálculo dos coeficientes
da série de Fourier.
A série de Fourier também pode ser escrita na forma compacta, como se segue:
y(t) =c0+ ∞
∑
n=1cncos(nω0t+θn), (4.5)
em que cneθnsão relacionados com ane bnpor:
c0=a0, (4.6)
cn= q
an2+bn2, (4.7)
θn=tg−1(
−bn an
). (4.8)
Nas Equações 4.7 e 4.8, n=1 corresponde as variáveis que representam o fasor fun-damental.
4.1.1
Algoritmo Fourier de um Ciclo
Este algoritmo fornece os coeficientes da série de Fourier de um sinal y(t), a partir de um ciclo de amostras do sinal. Para isso, o processo de integração das Equações 4.2, 4.3
e 4.4 é realizado em um período T0:
a0= 1 T0
Z t+T0
t
y(t)dt, (4.9)
an= 2 T0
Z t+T0
t
y(t)cos(nω0t)dt, (4.10)
bn= 2 T0
Z t+T0
t
y(t)sen(nω0t)dt. (4.11)
O sinal em tempo contínuo y(t), referente à Equação 4.1, pode ser representado a partir de suas amostras em tempo discreto. Considerando-se N amostras em um ciclo da
CAPÍTULO 4 - FUNDAMENTOS DA ESTIMAÇÃO DE FASORES 47
a0= 1 N
N−1
∑
j=0y(tk), (4.12)
an= 2 N
N−1
∑
k=0y(tk)cos(n 2πk
N ), (4.13)
bn= 2 N
N−1
∑
k=0y(tk)sen(n 2πk
N ). (4.14)
As Equações 4.13 e 4.14 podem ser escritas como:
an= 2 N
N−1
∑
k=0y(tk)hc(k), (4.15)
bn= 2 N
N−1
∑
k=0y(tk)hs(k), (4.16)
em que hce hs podem ser interpretados como os coeficientes dos filtros de Fourier, como
segue:
hc= 2 N
h
1 cos n2πN cos n4πN · · · cosn2π(NN−1) i, (4.17)
hs= 2 N
h
0 sen n2Nπ sen n4Nπ · · · senn2π(NN−1) i. (4.18)
4.1.2
Algoritmo de Fourier de Meio Ciclo
Este algoritmo é semelhante ao de Fourier de um ciclo. Porém, apenas meio ciclo
do sinal y(t) é utilizado para obter os coeficientes da série de Fourier. Desta forma, as Equações 4.12 a 4.14 passam a ser escritas como (WU et al., 2009):
a0= 2 N
N
2−1
∑
k=0y(tk), (4.19)
an= 4 N
N
2−1
∑
k=0y(tk)cos(n 2πk
N ), (4.20)
bn= 4 N
N
2−1
∑
k=0y(tk)sen(n 2πk
48 CAPÍTULO 4 - FUNDAMENTOS DA ESTIMAÇÃO DE FASORES
em que os filtros hce hs são definidos por:
hc= 4 N
h
1 cos n2Nπ cos n4Nπ · · · cosn2π(
N
2−1)
N
i
, (4.22)
hs= 4 N
h
0 sen n2Nπ sen n4Nπ · · · senn2π(
N
2−1)
N
i
. (4.23)
4.2
Algoritmos Baseados nos Métodos dos Mínimos
Qua-drados
Os métodos de estimação fasorial baseados em mínimos quadrados são divididos em
algoritmos em batelada e recursivos. Os algoritmos em batelada se caracterizam por
estimar os fasores utilizando todas as amostras do sinal de uma única vez, enquanto que
os recursivos estimam os fasores para cada nova amostra do sinal. Estes métodos terão
sua fundamentação matemática exposta a seguir.
4.2.1
Mínimos Quadrados em Batelada
O método de mínimos quadrados é uma técnica de ajuste de curvas, no qual se ajusta
uma função matemática pré-definida ˆy a um conjunto de amostras de uma grandeza qual-quer y. O melhor ajuste é alcançado quando a soma dos quadrados dos erros entre os
valores estimados e os reais é minimizada.
O modelo para o sinal y(t)é representado por uma série de Fourier, dado por:
ˆ
y(t) =a0+ ∞
∑
n=1[ancos(nω0t) +bnsen(nω0t)], (4.24)
sendoω0a frequência angular fundamental; ane bnas amplitudes e n a ordem da
harmô-nica considerada no modelo.
De forma generalizada, o modelo pode ser escrito como:
ˆ
y(t) =φ1ψ1+φ2ψ2+· · ·+φpψp, (4.25)
em que φ1,φ2,· · ·,φp são os regressores e ψ1,ψ2,· · ·,ψp são os parâmetros a serem
CAPÍTULO 4 - FUNDAMENTOS DA ESTIMAÇÃO DE FASORES 49
De forma compacta, a Equação 4.25 pode ser escrita como:
ˆ
Y =ΨΦ, (4.26)
em queΦé o vetor dos regressores eΨe vetor dos parâmetros, definidos por:
Φ= φ1 φ2 .. . φp , (4.27) Ψ= ψ1 ψ2 .. . ψp . (4.28)
Para o caso específico do modelo da Equação 4.24, o vetor dos regressores e o vetor
dos parâmetros possuem a ordem de(2n+1)x 1 e 1 x(2n+1), respectivamente. Esses vetores são dados por:
Φ= 1
cos(ω0t)
cos(2ω0t)
.. .
cos(nω0t)
sen(ω0t)
sen(2ω0t)
.. .
sen(nω0t)
, (4.29)
Ψ=h a0 a1 a2 · · · an b1 b2 · · · bn i
. (4.30)
Tem-se que N amostras consecutivas do sinal y(t)podem ser aproximadas pelo mo-delo matemático do sinal, resultando em:
y(1) =φ1(1)ψ1+φ2(1)ψ1+· · ·+φp(1)ψp, y(2) =φ1(2)ψ1+φ2(2)ψ1+· · ·+φp(2)ψp,
.. .
y(N) =φ1(N)ψ1+φ2(N)ψ1+· · ·+φp(N)ψp.
50 CAPÍTULO 4 - FUNDAMENTOS DA ESTIMAÇÃO DE FASORES
As Equações 4.31 podem ser escritas na forma matricial, resultando em:
Y =MΨ, (4.32)
em que:
M=
φ1(1) φ2(1) · · · φp(1) φ1(2) φ2(2) · · · φp(2)
..
. ... . .. ... φ1(N) φ2(N) · · · φp(N)
, (4.33)
Y =h y(1) y(2) · · · y(N) i. (4.34)
A solução de mínimos quadrados, minimizará a soma dos quadrados dos erros v, dado por:
v=
N
∑
k=1(yˆ−y)2. (4.35)
A determinação do vetor dos parâmetros para a Equação 4.32 que minimiza o erro
quadrático é denominada solução de mínimos quadrados, obtida derivando-se a Equação
4.35 e igualando-a a zero. A dedução desta solução encontra-se no Apêndice B, que resulta em (LJUNG, 1999):
Ψ=M+Y, (4.36)
em que M+representa a matriz pseudo-inversa de M, definida como:
M+= (MTM)−1MT. (4.37)
A solução obtida pelo uso da Equação 4.36 é chamada de solução em batelada, pois
utiliza de uma só vez todas as amostras do sinal. Esse tipo de solução requer um grande
esforço computacional, principalmente quando a matriz M apresenta uma ordem elevada.
Em aplicações em que se deseja atualizar a estimativa a cada nova amostra do sinal é
necessário uma solução recursiva.
4.2.2
Mínimos Quadrados Recursivo
A vantagem de um algoritmo recursivo é o menor esforço computacional em relação
a um algoritmo em batelada na estimação dos parâmetros em um tempo ti+1 quando se
conhece suas estimativas no tempo ti. Então, o primeiro passo para o algoritmo de