Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pós-Graduação em Engenharia Elétrica
Localização de Faltas em Linhas de
Transmissão usando Morfologia Matemática
Paulo Anderson Holanda Cavalcante
UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
Universidade Federal do Rio Grande
do Norte
Centro de Tecnologia
Programa de Pós-Graduação em
Engenharia Elétrica
Localização de Faltas em Linhas de
Transmissão usando Morfologia Matemática
Paulo Anderson Holanda Cavalcante
Orientador: Prof. Dr. Madson Cortes de Almeida Co-orientador: Prof. Dr. Fabiano Fragoso Costa
Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em Enge-nharia Elétrica da UFRN (área de concen-tração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Engenharia Elétrica
Ao meu pai Adirson (in memorian) por ser referência em minha vida.
AGRADECIMENTOS
Ao meu orientador professor Madson e ao meu co-orientador Fabiano pela excelente orientação, paciência, disponibilidade e conança dada a mim para desenvolvimento deste trabalho.
A minha mãe Penha, a minha irmã Paula e a meus irmãos Adirson e Addson pelo apoio e incentivo durante esta jornada.
Aos colegas do Laboratório de Acionamento, Controle e Instrumentação (LACI) por sempre estarem dispostos a me atender contribuindo para o andamento do trabalho.
Aos professores e colegas do Departamento de Sistemas de Energia Elétrica da UNI-CAMP pela acomodação e atenção durante minha permanência na instituição.
Aos professores e colegas do PPGEEC que contribuíram para minha formação acadê-mica.
A CAPES pela bolsa de mestrado concedida.
RESUMO
Neste trabalho, um algoritmo de localização de faltas é desenvolvido, consistindo dos módulos de detecção, classicação e localização da falta. Na implementação do algoritmo a Morfologia Matemática será a ferramenta utilizada para analisar os sinais das correntes obtidas em um dos terminais da linha. Diferente das Transformadas de Fourier e Wavelet que são normalmente aplicadas à localização de faltas, a Morfologia Matemática é uma transformação não linear baseada apenas em operações de adição e subtração acompanhadas da extração de máximos e mínimos de conjuntos discretos. Portanto, a Morfologia Matemática apresenta a vantagem de ser computacionalmente bastante eciente.
Nos módulos de detecção e classicação a Wavelet Morfológica foi usada na extração de informações contidas nas baixas e nas altas frequências. No módulo de localização da falta o ltro Gradiente Morfológico Multirresolução foi utilizado na detecção dos instantes de chegada das ondas viajantes e na determinação de suas polaridades. A partir dos instantes de chegada das duas primeiras ondas viajantes incidentes no ter-minal de medição e da velocidade de propagação dessas ondas, a localização da falta pode ser estimada com precisão.
Para analisar o desempenho do algoritmo, um sistema de transmissão de 440 kV simulado no software ATP foi submetido à diversas circunstâncias de falta, variando-se parâmetros como: distância da falta, tipo da falta, resistência da falta, ângulo de incidência da falta, nível de ruídos e frequência de amostragem dos sinais. Os resultados obtidos mostram que a aplicação da Morfologia Matemática na localização de faltas é bastante promissora.
Palavras chave: Localização de faltas, linhas de transmissão, morfologia mate-mática, ondas viajantes, sistemas de energia elétrica.
ABSTRACT
This work an algorithm for fault location is proposed. It contains the following func-tions: fault detection, fault classication and fault location. Mathematical Morpho-logy is used to process currents obtained in the monitored terminals. Unlike Fourier and Wavelet transforms that are usually applied to fault location, the Mathematical Morphology is a non-linear operation that uses only basic operation (sum, subtraction, maximum and minimum). Thus, Mathematical Morphology is computationally very ecient.
For detection and classication functions, the Morphological Wavelet was used. On fault location module the Multiresolution Morphological Gradient was used to detect the traveling waves and their polarities. Hence, recorded the arrival in the two rst traveling waves incident at the measured terminal and knowing the velocity of propagation, pinpoint the fault location can be estimated.
The algorithm was applied in a 440 kV power transmission system, simulated on ATP. Several fault conditions where studied and the following parameters were evalu-ated: fault location, fault type, fault resistance, fault inception angle, noise level and sampling rate. The results show that the application of Mathematical Morphology in faults location is very promising.
Keywords: Fault location, transmission lines, mathematical morphology, traveling waves, power systems.
Sumário
1 Introdução 1
1.1 Objetivos . . . 6
1.2 Classicação dos métodos de localização de faltas . . . 6
1.2.1 Uso de componentes fundamentais com dados de um terminal . 7 1.2.2 Uso de componentes fundamentais com dados de dois terminais 10 1.2.3 Uso de ondas viajantes com Morfologia Matemática . . . 11
1.2.4 Uso de ondas viajantes com outras ferramentas . . . 13
1.3 Estrutura da Dissertação . . . 16
2 Morfologia Matemática 18 2.1 Filtros Morfológicos . . . 19
2.1.1 Dilatação . . . 20
2.1.2 Erosão . . . 21
2.2 Gradiente Morfológico (GM) . . . 23
2.3 Gradiente Morfológico Multirresolução (GMM) . . . 23
2.4 Comparação do GM e do GMM . . . 24
2.4.1 Variação do Tamanho do Elemento Estruturante . . . 26
2.4.2 Variação da Frequência de Amostragem dos Sinais . . . 28
2.4.3 Variação da Resistência de Falta . . . 31
2.4.4 Variação do Ângulo de Incidência de Falta . . . 33
2.5 Wavelet Morfológica (WM) . . . 35
2.6 Conclusões . . . 39
3 Detecção e Classicação da Falta 40
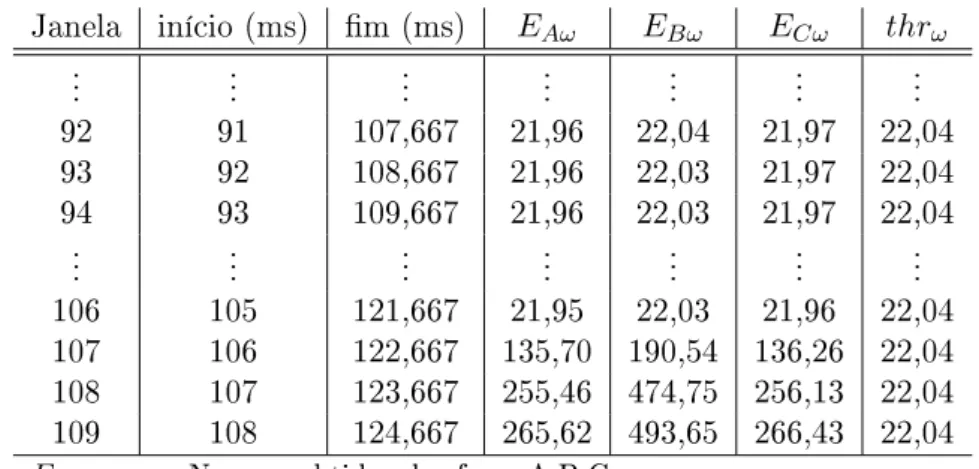
3.1 Detecção da Falta . . . 41
3.1.1 Detecção a partir dos coecientes de detalhe da WM . . . 42
3.1.2 Detecção a partir dos coecientes de aproximação da WM . . . 45
3.2 Algoritmo de detecção de faltas . . . 47
3.3 Classicação de Faltas . . . 48
3.4 Conclusões . . . 50
4 Algoritmo de localização da falta 51 4.1 Introdução . . . 51
4.2 Princípio das ondas viajantes . . . 51
4.2.1 Faltas monofásicas e bifásicas-terra . . . 52
4.2.2 Faltas bifásicas e trifásicas . . . 54
4.3 Módulo localizador de falta . . . 55
4.4 Ajuste dos dados de entrada . . . 56
4.5 Transformação modal . . . 56
4.5.1 Velocidade de propagação . . . 58
4.6 Detecção da primeira frente de onda . . . 59
4.7 Detecção da segunda frente de onda . . . 60
4.7.1 Limiares adicionais . . . 61
4.7.2 Polaridades das frentes de onda . . . 63
4.7.3 Fluxograma usado na detecção da segunda frente de onda . . . 65
4.8 Conclusões . . . 66
5 Resultados das Simulações 67 5.1 Sistema utilizado nos testes . . . 68
5.2 Inuência dos tipos das faltas . . . 69
5.3 Inuência do terminal de medição . . . 70
5.4 Inuência do ângulo de incidência da falta . . . 71
5.5 Inuência da resistência de falta . . . 73
5.6 Inuência da frequência de amostragem dos sinais . . . 75
5.7 Inuência de ruídos . . . 77
5.8 Inuência da modelagem da linha de transmissão . . . 78
5.9 Inuência da precisão dos parâmetros da linha . . . 80
5.10 Conclusões . . . 82
6 Conclusões Gerais 83 6.0.0.1 Propostas de continuidade do trabalho . . . 85
Referências Bibliográcas 85 A Modelagem do Sistema de Transmissão 92 A.0.0.2 Parâmetros dos Geradores . . . 93
A.0.0.3 Parâmetros dos Terminais A e B . . . 94
A.0.0.4 Parâmetros da Linha de Transmissão . . . 94
A.0.0.5 Arquivo Final de Entrada . . . 97
Lista de Tabelas
3.1 Normas calculadas para as janelas de amostragem da Figura 3.1 . . . 43
3.2 Normas calculadas para as janelas de amostragem da Figura 3.1 . . . 46
4.1 Curtos-circuitos ocorridos por nível de tensão em 2006. . . 53
4.2 Coecientes usados na detecção da segunda frente de onda. . . 61
5.1 Parâmetros da Linha de Transmissão 440 KV - circuito simples. . . 68
5.2 Parâmetros dos geradores. . . 68
6.1 Erros médios obtidos pelo algoritmo de localização de faltas.. . . 84
A.1 Dados dos geradores . . . 93
A.2 Parâmetros dos geradores . . . 93
A.3 Parâmetros da Linha de Transmissão. . . 96
Lista de Figuras
2.1 Dilatação de um sinal senoidal contendo um ruído branco peloEE ={01,02,03, ...,020} 21
2.2 Dilatação de um sinal senoidal contendo um ruído branco peloEE ={01,02,03, ...,010} 21
2.3 Erosão de um sinal senoidal contendo um ruído branco peloEE={01,02,03, ...,020} 22
2.4 Erosão de um sinal senoidal contendo um ruído branco peloEE={01,02,03, ...,010} 22
2.5 Sistema de transmissão analisado. . . 24
2.6 1◦ nível de decomposição do GMM . . . 25
2.7 2◦ nível de decomposição do GMM . . . 25
2.8 3◦ nível de decomposição do GMM . . . 25
2.9 GM com EE de três elementos . . . 26
2.10 GM com EE de cinco elementos . . . 26
2.11 GM com EE de sete elementos . . . 27
2.12 GMM com EE de quatro elementos . . . 27
2.13 GMM com EE de seis elementos . . . 27
2.14 GMM com EE de oito elementos . . . 28
2.15 GM para frequência de amostragem de 120 kHz . . . 29
2.16 GM para frequência de amostragem de 240 kHz . . . 29
2.17 GM para frequência de amostragem de 480 kHz . . . 29
2.18 GMM para frequência de amostragem de 120 kHz . . . 30
2.19 GMM para frequência de amostragem de 240 kHz . . . 30
2.20 GMM para frequência de amostragem de 480 kHz . . . 30
2.21 GM para resistência de falta de 1Ω . . . 31
2.22 GM para resistência de falta de 50Ω . . . 31
2.23 GM para resistência de falta de 100Ω . . . 31
2.24 GMM para resistência de falta de 1Ω. . . 32
2.25 GMM para resistência de falta de 50Ω . . . 32
2.26 GMM para resistência de falta de 100Ω . . . 32
2.27 GM para ângulo de incidência de falta de0◦ . . . 33
2.28 GM para ângulo de incidência de falta de45◦ . . . 34
2.29 GM para ângulo de incidência de falta de90◦ . . . 34
2.30 GMM para ângulo de incidência de falta de0◦ . . . 34
2.31 GMM para ângulo de incidência de falta de45◦ . . . 34
2.32 GMM para ângulo de incidência de falta de90◦ . . . 35
2.33 Esquema de decomposição e reconstrução de um sinalxj(n) . . . 35
2.34 Decomposição pela WMH do primeiro ao terceiro nível . . . 37
2.35 Decomposição pela WMH do quarto ao sétimo nível . . . 38
3.1 Processo de detecção da falta . . . 42
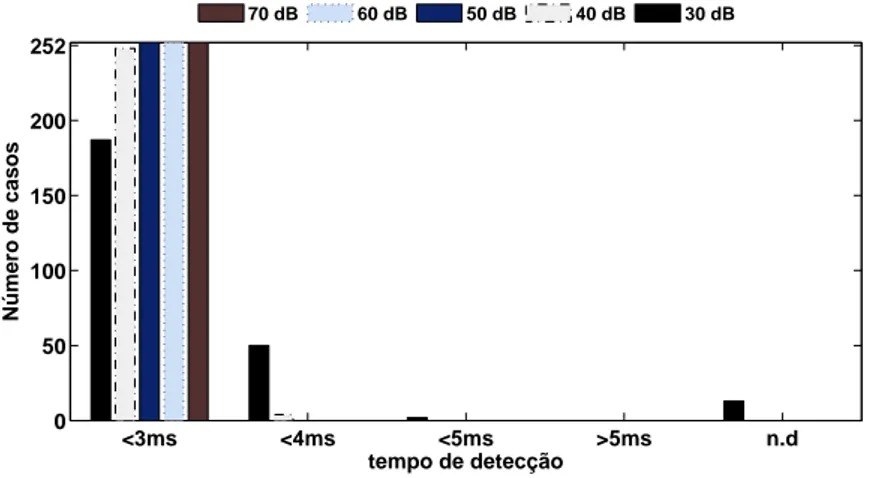
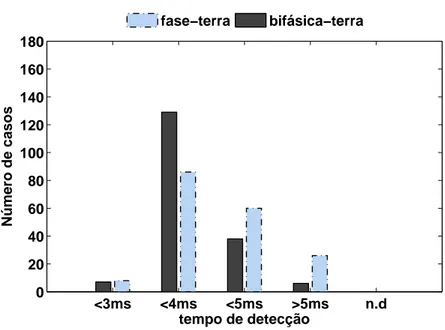
3.2 Tempo de detecção para faltas fase-terra. n.d indica os casos não detectados. 44 3.3 Tempo de detecção para faltas bifásica-terra. n.d indica os casos não detectados. 44 3.4 Tempos de detecção para faltas fase-terra e bifásica-terra. Foram simulados 180 casos para cada tipo de falta. n.d indica os casos não detectados. . . 46
3.5 Fluxograma do algoritmo de detecção da falta . . . 47
3.6 Fluxograma do algoritmo de classicação da faltas . . . 48
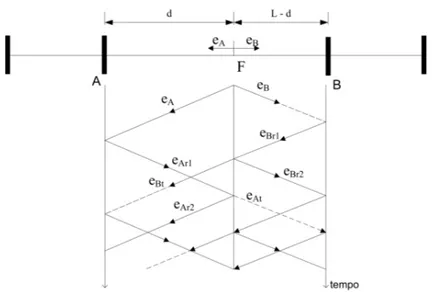
4.1 Diagrama de Lattice típico para uma falta aterrada . . . 53
4.2 Diagrama de Lattice típico para uma falta não aterrada . . . 54
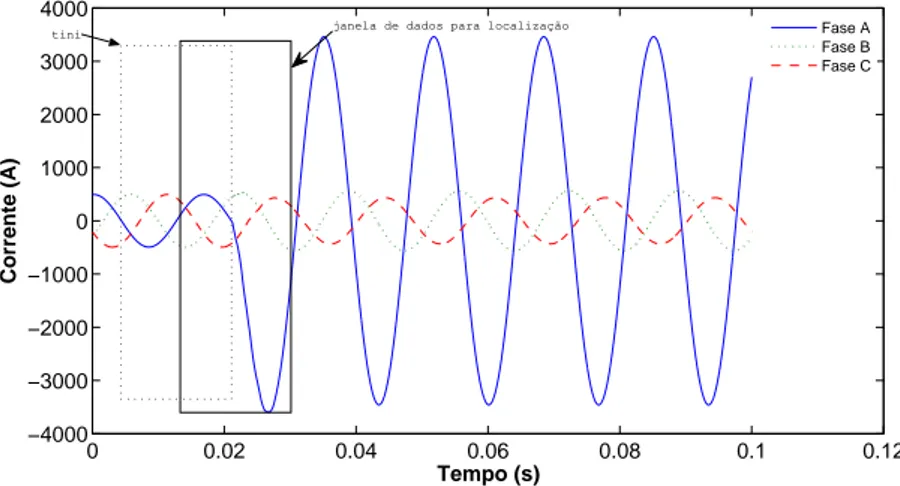
4.3 Ajuste da janela de dados do módulo de localização. . . 56
4.4 Fluxograma usado na determinação da polaridade e do instante associado a primeira frente de onda. . . 60
4.5 Detecção das ondas viajantes com as mesmas polaridades . . . 64
4.6 Detecção das ondas viajantes com polaridades opostas . . . 64
4.7 Fluxograma usado na determinação da polaridade e do instante associado a segunda frente de onda. . . 65
5.1 Sistema de transmissão analisado. . . 68
5.2 Erro na estimativa do local da falta em função da distância falta para todos
os tipos de falta. . . 69
5.3 Erro na estimativa do local da falta em função do terminal de medição para uma falta bifásica-terra (AC-T) . . . 70
5.4 Erro na estimativa do local da falta em função do terminal de medição para uma falta fase-terra (CT). . . 71
5.5 Erro na estimativa do local da falta em função de ângulo de incidência para uma falta fase-terra (AT). . . 72
5.6 Erro na estimativa do local da falta em função de ângulo de incidência para uma falta fase-fase-terra (ACT). . . 72
5.7 Erro na estimativa do local da falta em função da resistência da falta para uma falta fase-terra (CT). . . 74
5.8 Erro na estimativa do local da falta em função da resistência da falta para uma falta fase-terra (CT). . . 74
5.9 Erro na estimativa do local da falta em função da resistência da falta para uma bifásica-terra (BCT). . . 74
5.10 Erro na estimativa do local da falta em função da resistência da falta para uma bifásica-terra (BCT). . . 75
5.11 Erro na estimativa do local da falta em função da taxa de amostragem para uma falta monofásica (BT). . . 76
5.12 Erro na estimativa do local da falta em função da taxa de amostragem para uma falta bifásica-terra (ABT). . . 76
5.13 Erro na estimativa do local da falta em função do nível de ruídos para uma falta fase-terra (AT). . . 77
5.14 Erro na estimativa do local da falta em função do modelo da linha de trans-missão para faltas monofásicas (AT). . . 79
5.15 Erro na estimativa do local da falta em função do modelo da linha de trans-missão para faltas bifásicas-terra (ABT). . . 79
5.16 Erro na estimativa do local da falta em função de erros nos parâmetros da linha de transmissão para faltas monofásicas (AT).. . . 80
5.17 Erro na estimativa do local da falta em função de erros nos parâmetros da linha de transmissão para faltas bifásicas-terra (BCT). . . 81
A.1 Sistema de Transmissão analisado . . . 93
A.2 Arquivo de entrada da rotina LINE CONSTANTS . . . 96
A.3 Geometria da torre 440 kV circuito simples . . . 97
A.4 Esboço do sistema elétrico adotado no ATPDraw . . . 97 A.5 Arquivo de entrada do ATP . . . 98
Capítulo 1
Introdução
Por possuir dimensões continentais e suas principais usinas hidrelétricas distantes dos maiores centros de consumo, o Brasil apresenta um extenso e complexo Sistema de Energia Elétrica (SEE). Com a desverticalização do setor de energia elétrica ocorrida em meados da década de 90, o SEE brasileiro foi dividido em geração, transmissão e distribuição da energia elétrica, levando a uma nova concepção do fornecimento de energia, como também a um novo modelo de regulamentação.
No que tange à transmissão, este novo modelo de regulamentação, em que mais de uma concessionária pode atuar na mesma área, aliado à contínua necessidade de expansão do SEE, obrigou as concessionárias de energia a realizar os investimentos necessários para tornarem-se mais competitivas no mercado. Ao mesmo tempo, o sistema de transmissão passou a ter parâmetros mais rígidos de controle de qualidade e avaliação de desempenho. Entre os principais aspectos observados nos índices de qualidade destacam-se a frequência e o tempo de indisponibilidade do fornecimento de energia elétrica. Para ilustrar os efeitos do não cumprimento dos índices de qualidade, a Equação 1.1 mostra como a receita anual permitida de uma concessionária transmissora pode ser reduzida de uma Parcela Variável por Indisponibilidade (PVI), descontada mensalmente do Pagamento Base (PB), devido à falta de fornecimento de energia elétrica (ONS, 2010). A análise desta equação mostra que a PVI e, portanto, a receita anual da concessionária, é diretamente afetada pela duração e pela frequência das interrupções no fornecimento de energia elétrica.
2
P V I = P B
24×60×D×Kp×(−
N P ∑
i=1
DDPi)+
P B
24×60×D×(−
N O ∑
i=1
Koi×DODi) (1.1) Onde:
• DDP: Duração, em minutos, de cada Desligamento Programado que ocorra
du-rante o mês;
• DOD: Duração, em minutos, de cada um dos Outros Desligamentos que ocorram
durante o mês;
• PB: Pagamento base da Instalação de Transmissão;
• Kp: Fator para Desligamentos Programados = Ko/15;
• Ko: Fator para Outros Desligamentos com duração até 300 minutos. Este fator
será reduzido para Kp após 300 minutos;
• NP = Número de Desligamentos Programados da instalação ao longo do mês;
• NO = Número de Outros Desligamentos da instalação ao longo do mês;
• D = Número de dias do mês.
Desta forma, torna-se imprescindível que o sistema de transmissão funcione correta e continuamente, permitindo o fornecimento de energia elétrica com alto padrão de qualidade, para que a concessionária não tenha prejuízos econômicos. Neste contexto, a m de minimizar o valor da PVI e, assim, maximizar os seus ganhos, é extremamente importante que as concessionárias de energia elétrica possuam metodologias ecientes de classicação e localização de faltas. Essas metodologias permitirão que os tempos dos desligamentos sejam reduzidos, o que tem inuência direta no cálculo da PVI.
3
Em um sistema de transmissão os componentes mais suscetíveis à ocorrência de faltas são as linhas de transmissão. Devido às suas dimensões físicas e à sua disposição geográca, as linhas de transmissão estão sujeitas a toda natureza de intempéries. As principais causas de desligamentos em linhas de transmissão são as descargas atmosfé-ricas, as queimadas, as falhas em equipamentos e as falhas humanas, as quais podem levar a ocorrência de curtos-circuitos, resultando na atuação do sistema de proteção e no desligamento das linhas.
Além de localizar defeitos sustentados ou permanentes, um sistema de localização de defeitos deve permitir a localização de faltas temporárias nas linhas de transmissão, indicando pontos do sistema que devem passar por manutenção ou reforço, evitando assim, o surgimento de problemas de maior complexidade no futuro. Portanto, as esta-tísticas relacionadas à ocorrência de faltas temporárias podem ser extremamente úteis no planejamento e na denição da losoa de proteção dos sistemas de transmissão.
Desse modo, a localização de faltas em linhas de transmissão é um assunto de grande interesse para pesquisadores e para concessionárias de transmissão de energia elétrica, principalmente após o surgimento dos relés microprocessados aplicados à pro-teção de sistemas de transmissão, os quais permitem o desenvolvimento de algoritmos e metodologias muito mais precisas e conáveis.
As principais técnicas de localização de faltas em linhas de transmissão são divididas em dois grupos:
• Técnicas que utilizam as componentes fundamentais dos sinais;
• Técnicas que utilizam os transitórios gerados pela falta, baseando-se na teoria de
ondas viajantes.
Estas técnicas podem ser classicadas quanto ao número de terminais monitorados:
• Técnicas que utilizam dados de um terminal da linha de transmissão;
• Técnicas que utilizam dados de mais de um terminal da linha de transmissão.
4
pelo desconhecimento da resistência de falta. Outra limitação dessas técnicas é que elas requerem o conhecimento de parâmetros do sistema de energia que são difíceis de serem obtidos na prática, como a impedância equivalente vista de cada terminal da linha (CHENG et al., 2010), (PEREIRA; JR., 2004) e, impedâncias de sequência zero (WANG; DONG; BO, 2008). Para superar estas diculdades, vários autores propõem simplicações nos modelos, como a remoção da resistência de falta, que se não forem vericadas, podem levar à grandes erros na localização da falta (DALCASTAGNE; ZIMATH, 2008).
Para melhorar a precisão das metodologias que utilizam as componentes fundamen-tais dos sinais, é possível fazer o monitoramento dos sinais em mais de um terminal da linha. Dessa forma, é possível retirar do equacionamento a resistência de falta e a impedância equivalente vista dos terminais da linha, como observado em (JOHNS; JA-MALI, 1989), (GIRGIS; FALLON, 1992) e (CRUZ, 2010). Essas técnicas apresentam precisão superior às que utilizam dados de apenas um terminal da linha e são menos in-uenciadas pela resistência de falta. Porém, estas técnicas requerem um mecanismo de sincronização de dados e um meio de comunicação para o envio de dados dos terminais remotos para o terminal local, onde os dados são processados. Assim, essas técnicas possuem um custo mais elevado em relação as técnicas que utilizam dados coletados em apenas um terminal da linha de transmissão.
5
Para detectar os instantes em que as ondas viajantes incidem no terminal monito-rado, é necessário um algoritmo capaz de extrair as informações dos transitórios dos sinais de tensão e/ou corrente. A ferramenta mais difundida para detecção das ondas viajantes é a Transformada Wavelet (TW), como observado em (MAGNAGO; ABUR, 1998) e (SILVA, 2003). Um dos principais desaos dos métodos baseados na teoria de ondas viajantes que utiliza dados coletados em apenas um terminal da linha, é a identicação da origem da segunda frente de onda viajante incidente no terminal de medição, uma vez que essa onda pode ter sido originada por uma reexão no terminal remoto ou no ponto de ocorrência da falta. Na maioria dos trabalhos que utilizam a transformada Wavelet, essa identicação se dá através do chamado modo terra de propagação dos sinais, os quais dependem dos parâmetros de sequência zero da linha de transmissão, que são difíceis de serem determinados na prática.
Uma ferramenta matemática pouco explorada e que é capaz de detectar as ondas viajantes com boa precisão é a Morfologia Matemática (MM). Esta ferramenta possui características atrativas para aplicação em algoritmos de proteção, como a simplicidade de implementação e o baixo número de operações matemáticas envolvidas, o que per-mite um alto desempenho computacional. A vantagem de alguns ltros morfológicos é que eles são capazes de detectar as polaridades das frentes de onda, permitindo identi-car a origem da segunda onda viajante incidente no terminal de medição, eliminando totalmente a necessidade dos parâmetros de sequência zero. Alguns trabalhos utilizam a MM para extrair as ondas viajantes geradas por uma falta, como visto em (WU; ZHANG; ZHANG, 2003) e (ZHANG; SMITH; WU, 2006). No entanto, estes traba-lhos utilizam taxas de amostragem extremamente elevadas, o que pode ser contornado com o melhora dos algoritmos, como pode ser observado em (SILVA; OLESKOVICZ; COURY, 2004) e (SILVA; OLESKOVICZ; SEGATTO, 2010).
1.1 Objetivos 6
1.1 Objetivos
O objetivo deste trabalho é apresentar um algoritmo computacional de localização de faltas em linhas de transmissão de energia elétrica que utiliza a Morfologia Mate-mática como ferramenta para o processamento dos sinais de corrente monitorados. O algoritmo proposto é formado pelos módulos de detecção, classicação e localização da falta. As principais contribuições deste trabalho foram conseguidas no módulo de localização da faltas, que utiliza a teoria de ondas viajantes com sinais de corrente capturados em apenas um terminal da linha de transmissão.
Os módulos que compõem o algoritmo de localização de faltas foram implementados no software Matlab e os sinais das correntes utilizados foram obtidos simulando as faltas no software ATP (Alternative Transients Program). Para avaliar o algoritmo proposto, foram realizadas uma série de simulações, variando-se os seguintes parâmetros: tipo da falta, distância da falta, resistência de falta, ângulo de incidência de falta e a presença de ruídos nos sinais.
A m de situar melhor a proposta desta dissertação, a seguir apresenta-se uma breve discussão das principais técnicas de localização de faltas presentes na literatura.
1.2 Classicação dos métodos de localização de faltas
Como dito anteriormente as principais técnicas apresentadas na literatura para resolver o problema de localização de faltas em linhas de transmissão são baseadas na teoria de ondas viajantes ou em informações extraídas dos sinais de tensão e/ou correntes na frequência fundamental do sistema elétrico. Os métodos que utilizam os valores de tensões e/ou correntes obtidas na frequência fundamental são chamados de métodos baseado em impedância e são os mais difundidos devido sua facilidade de implementação. Há ainda os métodos baseados em variáveis do sistema como os dados de monitoramento do sistema e em condições climáticas. Tais métodos podem ser aplicados em conjunto com os demais métodos, formando os métodos híbridos.
1.2 Classicação dos métodos de localização de faltas 7
a ocorrência da falta. Portanto, de forma resumida, os métodos de localização de de-feitos podem ser classicados de acordo com o princípio e o tipo de dados utilizados, sendo que um método pode conter mais de uma dessas características.
A seguir, inicialmente são apresentadas as técnicas baseadas nas componentes fun-damentais de tensões e/ou correntes. Estes métodos são divididos de acordo com o número de terminais monitorados. Em seguida, os métodos baseados na teoria de on-das viajantes são apresentados e subdivididos em duas classes, uma para as técnicas que utilizam a Morfologia Matemática e outra para as técnicas que utilizam outros me-canismos de processamento dos sinais. Os trabalhos nas seções a seguir estão dispostos em ordem cronológica de publicação.
1.2.1 Uso de componentes fundamentais com dados de um
ter-minal
Em (TAKAGI et al., 1981) propõe-se um algoritmo de localização de faltas utili-zando dados do terminal local. O algoritmo utiliza a transformação modal das compo-nentes fundamentais dos sinais de tensão e corrente extraídos através da transformada de Fourier. A metodologia utiliza ainda o teorema da superposição para separar as informações das condições pré-falta e sob falta. Em seguida uma relaçãoK(x)é obtida
da razão entre as correntes da rede sob falta que uem do ponto da falta em direção aos terminais da linha, sendo que esta relação é expressa em função da distância de falta. Com isso, a equação da tensão no ponto da falta(VF)é escrita em termos da resistên-cia da falta (RF), da corrente do terminal local da rede sob falta (I
′′
F S) e da constante
K(x). VF e I
′′
F S também podem ser escritos em termos das constantes generalizadas do circuito. Assim, rearranjando as três equações obtém-se uma função não linear que fornece a distância da falta, para uma resistência de falta puramente resistiva e para
K(x) constante e real. Nesta técnica, se a resistência da falta RF é elevada, os resul-tados da localização da falta podem conter grandes erros. A precisão deste método é inuenciado ainda pela impedância de geradores, de linhas de transmissão e do ponto de ocorrência da falta.
1.2 Classicação dos métodos de localização de faltas 8
os efeitos da corrente de carga utilizando as variações da corrente devido a falta. Além disso, os erros causados pela resistência da falta e pelos arranjos não simétricos da linha de transmissão são minimizados. Porém, sua precisão é inuenciada pela impedância equivalente dos terminais da linha e pela localização da falta.
Em (WISZNIEWSKI, 1983) apresenta-se uma metodologia de localização de faltas baseada na reatância aparente medida em um terminal da linha. Propõe-se um fator de distribuição que relaciona a corrente que ui através da resistência de falta e a corrente de falta pura, a m de reduzir os erros introduzidos pela resistência de falta. Nesta metodologia considera-se que o ângulo de fase impedância da linha de transmissão e da impedância vista até o ponto da falta são pequenos e iguais. O fator de distribuição depende das impedâncias equivalentes dos terminais e o algoritmo foi desenvolvido considerando parâmetros concentrados, logo não é exato para linhas longas.
(ERIKSSON; SAHA; ROCKEFELLER, 1985) usa dados de corrente e tensão em um terminal da linha para localizar a falta, considerando a inuência do terminal remoto utilizando o modelo completo da rede. Na metodologia foram usados os com-ponentes de sequência positiva e negativa, já que um fator de distribuição proposto é desconhecido para sequência zero. O cáculo da distância da falta é resolvido por uma equação complexa quadrática, a qual possui como variáveis a resistência de falta e a distância da falta. A resolução se dá através da separação da parte real e imaginária da equação, eliminando a resistência da falta do equacionamento. Neste método podem ser obtidas duas posições factíveis para a falta, o que diculta a identicação do ponto real de ocorrência da falta.
(YIBIN; WAI; KEERTHIPALA, 1997) propõe uma técnica de localização de faltas baseada no cálculo da impedância e que utiliza dados de corrente e tensão em um terminal da linha. O sexto nível de detalhe da Transformada Wavelet Discreta (TWD) que compreende a faixa de 39 à 78Hz é utilizada para extrair a componente fundamental dos sinais de tensão e corrente. Os resultados demonstram que a aplicação da TWD produziu erros inferiores àqueles encontrados usando a transformada de Fourier. Nos testes foram consideradas apenas faltas bifásicas e fase-terra, todas com resistência de falta igual a zero. Os autores acreditam que a TWD possa ser usada como um primeiro passo no processamento do algoritmo localização de faltas para obter uma melhor precisão.
po-1.2 Classicação dos métodos de localização de faltas 9
sição de falta utilizando dados de tensão e corrente em um terminal. Na modelagem é utilizado um circuito duplo de transmissão, onde quatro das seis linhas estão sob uma falta à terra. O equacionamento parte das leis de Kirchho da corrente e da tensão, e não envolve a impedância da fonte do terminal remoto. A localização da falta é obtida resolvendo a equação diferença de segundo grau. A precisão do algoritmo não é afetada pelo uxo de carga e pela resistência de falta. Nas simulações assume-se que tanto os parâmetros da linha quanto a frequência de amostragem são conhecidas com exatidão, o que nem sempre é verdadeiro e pode gerar grandes erros na localização da falta.
Em (PEREIRA; JR., 2004) apresenta-se um algoritmo para localização de faltas que usa fasores medidos apenas no terminal local. No algoritmo são usados somente os fasores de tensão pós-falta e os fasores de corrente pré-falta, evitando o uso de cor-rentes saturadas do transformador de corrente (TC). Na modelagem da metodologia é necessário conhecer as impedâncias equivalentes nos terminais e o tipo da falta, já que a matriz de impedância de falta é especíca para cada tipo de falta. A localização da falta é obtida comparando a tensão terminal medida com as tensões nodais calcu-ladas, usando como função objetivo o somatório do módulo dos erros destas variáveis. O algoritmo fornece boa precisão para diferentes tipos de falta, resistência de falta, localização da falta e variação da impedância equivalente da rede nos dois terminais.
(WANG; DONG; BO, 2008) desenvolve um algoritmo de localização de faltas fase-terra em linhas de transmissão, baseado no cálculo da impedância aparente utilizando fasores de tensão e corrente em apenas um terminal. O método é imune à capacitância shunt da linha e a resistência de falta, pois o cálculo da distância é executado quando a tensão no ponto de falta é zero. O modelo adotado para a linha é o de parâmetros distribuídos. A distância da falta é estimada por um algoritmo iterativo e converge quando o erro entre a parte real da tensão calculada a partir da impedância e a parte real da tensão medida for mínimo. As simulações indicam uma boa precisão na localização da falta.
1.2 Classicação dos métodos de localização de faltas 10
desconhecidas. O princípio é baseado no modelo R-L de linhas de transmissão, o qual não é adequado para linhas longas. Os resultados mostraram que o algoritmo é insen-sível à resistência de falta, ao ângulo de incidência, a posição da falta, ao valor inicial atribuído as variáveis que serão estimadas pelo método numérico. Porém, o método tem sua precisão prejudicada quando variou a impedância equivalente de sequência zero do terminal remoto.
(SUN; SOOD, 2010) propõe uma melhora no método descrito por (TAKAGI et al., 1982) usando uma nova corrente de sobreposição introduzida por (ERIKSSON; SAHA; ROCKEFELLER, 1985), a qual tem a função de compensar o desconhecimento da cor-rente de sequência zero. Esta metodologia apresenta uma melhor precisão que o método tradicional quando a posição da falta é variada e quando são adotados parâmetros dis-tribuídos na modelagem da linha. Aplicando-se técnicas avançadas de processamento de sinais que utilizam maior taxa amostral, a precisão do algoritmo proposto é comprá-vel às técnicas que usam dados de dois terminais para faltas fase-terra com resistência de falta nula.
1.2.2 Uso de componentes fundamentais com dados de dois
ter-minais
(JOHNS; JAMALI, 1989) propõe uma técnica de localização de faltas que utiliza dados de corrente e tensão pós-falta nos dois terminais da linha. A localização da falta é estimada igualando-se as duas equações da tensão no ponto da falta vista de cada terminal da linha e considera o modelo de parâmetros distribuídos. Para aplicação em sistemas trifásicos, a rede é desacoplada utilizando a transformação modal de We-dephol. O método não é inuenciado pela resistência da falta, pelo local da falta e pela impedância das fontes. Porém, sofre inuência de erros na estimação dos fasores, nos parâmetros da linha e no sincronismo dos dados dos dois terminais.
1.2 Classicação dos métodos de localização de faltas 11
as informação da carga e ao comprimento das linhas.
(CHUNJU et al., 2007) apresenta uma técnica de localização de faltas para linhas de transmissão, onde os fasores de tensão e corrente são obtidos nos dois terminais da linha através de Unidades de Medição Fasorial (do inglês PMU). Os parâmetros da linha e dos geradores são obtidos de forma on-line, a partir dos dados de tensão e corrente pré-falta. As componentes simétricas de sequência positiva dos sinais superpostos de tensão e corrente são usados para o cálculo do local da falta, a qual é obtida igualando-se as equações da tensão no ponto da falta vista dos dois terminais. As simulações indicaram que o algoritmo proposto é preciso para linhas de transmissão com circuitos simples, duplo e sistemas com múltiplos terminais. A localização da falta não foi inuenciada pela resistência de falta, o tipo da falta, o modo de geração, a mudança nos parâmetros causados pelo ambiente, o modo de operação e os uxos na linha.
(CRUZ, 2010) apresenta um algoritmo de localização de faltas para linha com com dois e três terminais. Nesta abordagem é utilizada a TW para indicar o instante de ocorrência da falta, servindo para a sincronização dos dados de tensão e corrente nos terminais monitorados. A partir dos fasores de tensão e corrente pós-falta sincronizados e da matriz de impedância série da linha, é possível equacionar a posição da falta igualando as equações das tensões de cada terminal. Através dos resultados é possível armar que o algoritmo foi eciente tanto na identicação do ramo faltoso quanto na localização da falta. A precisão do algoritmo não foi afetado de forma signicante pela variação do ângulo de incidência de falta e pela distância da falta. No entanto, o algoritmo foi sensível, em alguns casos, ao aumento da resistência de falta, devido ao sincronismo dos dados.
1.2.3 Uso de ondas viajantes com Morfologia Matemática
1.2 Classicação dos métodos de localização de faltas 12
resultados mostraram que as ondas viajantes e sua direção de propagação podem ser facilmente detectadas pela magnitude e polaridade do ltro morfológico. A frequência de amostragem utilizada foi de 1MHz.
(WU; ZHANG; ZHANG, 2003) apresenta uma expansão do trabalho proposto por (ZHANG et al., 2002). A transformação modal de Clarke dos dados de corrente e tensão em um terminal é utilizada. O GMM é utilizado para extrair os transitórios gerados pela falta. A técnica proposta também é capaz de determinar se a falta ocorreu montante ou a jusante do ponto de medição. Usando o GMM dos modos aéreos dos sinais de tensão e corrente obtidos nos relés é possível indicar corretamente a direção que ocorreu a falta para vários tipos de falta, posições, resistência de falta e ângulo de incidência de falta. A taxa de amostragem dos sinais foi de 1MHz.
(ZHEN et al., 2005) aplica o ltro morfológico da mediana que calcula a mediana entre três amostras consecutivas para a redução de ruídos nos sinais faltosos de corrente medidos em um terminal, com objetivo de melhorar a precisão do algoritmo de loca-lização de faltas baseado em ondas viajantes. A transformação de Clarke é realizada nos sinais de corrente e em seguida é executado o ltro GMM para extração das três primeiras frentes de onda. A análise de segurança é realizada para examinar e medir a conabilidade da localização da falta sob diferentes relações-sinal-ruído (SNR). A frequência de amostragem utilizada foi de 1MHz.
Em (JING et al., 2005) é proposto um algoritmo de localização de faltas usando da-dos de corrente de um terminal. Um bloco de múltiplos ltros morfológicos é proposto para diminuir o nível de ruído nos sinais. Estes ltros atuam tanto no modo aéreo alfa da transformação modal de Clarke quanto na saída do GMM, o qual é responsável pela extração das frentes de onda geradas pela falta. A metodologia também é capaz de detectar se a falta ocorreu em linhas de transmissão adjacentes através da análise das polaridades da saída do GMM. Os resultados mostraram que o algoritmo apresenta desempenho satisfatório em diferentes condições de falta e congurações do sistema de energia elétrica.
1.2 Classicação dos métodos de localização de faltas 13
para extrair as frentes de onda. Na localização da falta foi utilizado o segundo nível de decomposição, mostrando resultados mais robustos quando comparados com o GMM. Porém, se o nível de decomposição não for o adequado para a situação faltosa o ltro proposto perde a característica de detectar a polaridade do sinal.
(YUQIN et al., 2006) propõe uma técnica de localização de faltas baseada na MM com dados de corrente de um terminal. Nesta técnica é proposto um módulo de combinação (MC) dos modos aéreos da transformada de Clarke. Este módulo é proposto pois em determinadas situações de falta, há modos que não se sensibilizam, o que pode prejudicar a localização. O ltro Gradiente Morfológico (GM) é utilizado para detectar as frentes de onda e suas polaridades a partir do MC. Com a utilização do MC proposto as ondas viajantes são mais destacadas, porém os ruídos também são amplicados. Os resultados das simulações mostram que a técnica é conável para vários tipos, localizações, ângulo de incidência e resistência de faltas.
Em (JI et al., 2009) um novo ltro morfológico chamado de Dierion é proposto para redução de ruídos nos sinais transitórios com o objetivo de melhorar o desempenho do algoritmo localizador de faltas baseado no GMM. A composição do ltro proposto é inspirado em três ltros básicos da MM chamados de dilatação, erosão e mediana. O ltro Dieron é calculado de modo rápido e simples, porém, o sucesso da ltragem depende da escolha dos parâmetros do ltro, como também do tamanho do elemento estruturante (EE). O ltro foi testado para vários tipos de falta em diversas posições da linha, os resultados mostraram que o desempenho do ltro Dierion é bastante promissor.
(LU; JI; WU, 2009) propõe um algoritmo de localização de faltas usando a teoria Lifting Morfológico para identicar o gradiente das frentes de onda com ruído. Neste algoritmo a janela preditora diminui cada vez que é detectada uma borda através de uma operação morfológica, permitindo eliminar ruídos e preservando as frentes de onda. O algoritmo é capaz de melhorar o desempenho da TW e do GMM, podendo fornecer uma resposta correta em um ambiente ruidoso para diferentes tipos de faltas, localizações, resistência de falta, ângulo de incidência de falta.
1.2.4 Uso de ondas viajantes com outras ferramentas
1.2 Classicação dos métodos de localização de faltas 14
um terminal da linha para localizar a falta. Para a detecção das ondas viajantes é utilizada a correlação cruzada entre as amostras dos sinais que incidem no terminal de medição. A detecção acontece quando ocorre um pico na saída da função de correlação, indicando uma boa compatibilidade entre as formas de onda. O intervalo de tempo ente os picos é usado para o cáculo da distância da falta. A precisão do método é dependente da localização da falta, do tipo de falta e do ângulo de incidência de falta.
(RAJENDRA; MCLAREN, 1985) desenvolve uma técnica baseada nas ondas via-jantes de tensão e corrente para uma linha com três terminais. O critério da função correlação cruzada depende das duas primeiras frentes de onda reetidas que possuem a mesma forma e periodicidade, gerando um alto valor na saída da função de corre-lação. A técnica também diferencia faltas ocorridas nas linhas adjacentes através da mudança de polaridade da saída da função de correlação cruzada.
Em (BO; JOHNS; AGGARWAL, 1997) um localizador de falta é proposto com base na extração dos transitórios de alta frequência das tensões e correntes gerados pela falta. Um circuito AGC (auto-gain-controller) é projetado para capturar e armazenar os transitórios de tensão e corrente. Em seguida, os sinais passam por um ltro digital para extrair a faixa de frequência desejada. O tempo de propagação dos sinais de alta frequência é usado para localizar a falta. O método é insensível ao tipo de falta, a resistência de falta, ao ângulo de incidência de falta e à conguração da fonte do sistema. A precisão da localização da falta é diretamente proporcional à frequência de amostragem dos sinais e é mais afetada pela presença de ruídos.
(JIAN; XIANGXUN; JIANCHAO, 1998) apresenta um localizador de faltas base-ado em dbase-ados dos dois terminais da linha. A Transformada Wavelet Contínua (TWC) é usada para detectar a chegada das ondas viajantes incidentes nos terminais. A taxa de amostragem utilizada foi de 1MHz. A precisão do algoritmo não é afetada pela resistência da falta e pela posição da falta.
1.2 Classicação dos métodos de localização de faltas 15
independente da impedância de falta, do tipo da falta e mostrou-se apropriado para circuitos duplos mutuamente acoplados, como também para linhas com compensação série capacitiva. O erro na localização da falta está diretamente relacionado com a frequência de amostragem dos sinais. O método apresentou erros para faltas que en-volvem a terra localizadas próxima da metade da linha.
Em (SILVA; OLESKOVICZ; COURY, 2004) foi desenvolvida uma metodologia de localização usando a TWD, que usa dados de tensão de um ou dos dois terminais. Os sinais de corrente são utilizados quando há informações de apenas um terminal. A análise multiresolução da TWD é aplicada nos modos terra e alfa da transformada de Clarke obtendo os coecientes de primeiro nível, por estes coecientes pode-se ca-racterizar os instantes de reexão das ondas viajantes do ponto de falta no ponto de medição. O desempenho geral do algoritmo foi satisfatório. O algoritmo que usa dados dos dois terminais foi um pouco superior ao que utiliza somente dados de um terminal. A metodologia se mostrou praticamente independente da impedância de falta, do tipo de falta, do ângulo de incidência de falta, da posição da falta e do efeito do acoplamento mútuo das linhas. A frequência de amostragem utilizada foi de 120 kHz.
(SPOOR; ZHU, 2006) um algoritmo localizador de faltas baseado na teoria de ondas viajantes é proposto utilizando dados de um terminal. Os dados de corrente são processados através da transformação modal de Clarke e TWC. As polaridades dos coecientes Wavelet com fator de escala superior a vinte são usadas para conrmar a natureza e o ponto exato de ocorrência da falta, como também para diferenciar faltas sustentadas de descargas de curta duração. Na abordagem foi levado em consideração o efeito da dos transdutores da subestação, resultados mostraram que a TWC é mais imune à ruídos que a TWD permitindo uma melhor identicação das ondas viajantes. A frequência de amostragem utilizada foi de 1,25MHz.
1.3 Estrutura da Dissertação 16
dentro da zona de proteção. A taxa de amostragem utilizada foi de 1MHz.
Em (SILVA; OLESKOVICZ; SEGATTO, 2010) foi desenvolvida uma metodologia híbrida para detecção, classicação e localização de faltas para um sistema de trans-missão com três terminais. Nesta metodologia a TWD foi utilizada para localização de faltas baseada em ondas viajantes e a Transformada Wavelet Estacionária para a metodologia usando a componente fundamental dos sinais de corrente e tensão. O algoritmo é projetado para trabalhar com dados de corrente ou tensão de um ou nos três terminais do sistema analisado. Os resultados mostraram que o desempenho glo-bal do algoritmo é satisfatório, apresentando boa precisão e uma rápida resposta. O algoritmo baseado em ondas viajantes mostrou-se virtualmente independente da impe-dância de falta, do tipo de falta, do ângulo de incidência de falta, da posição da falta e do efeito do acoplamento mútuo das linhas. No entanto, foi sensível à ruídos abaixo de 60dB, como também a combinação de alta resistência de falta e baixo ângulo de in-cidência de falta, que geram pequenas ondas viajantes e são, consequentemente, difícil de detectar. A técnica que utiliza a componente fundamental apresentou desempenho satisfatório no que se diz respeito de precisão e velocidade de resposta. Entretanto, seu desempenho é inuenciado pela proximidade da falta aos terminais de medição, pelo acoplamento mútuo das linhas e também pela resistência de falta acima de 100Ω. A
taxa de amostragem utilizada foi de 240 kHz.
1.3 Estrutura da Dissertação
Para nalizar este capítulo, a seguir apresenta-se de forma breve o conteúdo de cada um dos capítulos.
No capítulo 2, são apresentados os fundamentos teóricos da Morfologia Matemá-tica e dos ltros morfológicos usados neste trabalho. Os aspectos relacionados a estes ltros e que serão de interesse no desenvolvimento das metodologias propostas serão discutidos. Além dos aspectos teóricos, são apresentados resultados de testes e discus-sões que justicam os ajustes que serão adotados nos ltros morfológicos nos capítulos seguintes.
algo-1.3 Estrutura da Dissertação 17
ritmos.
O capítulo 4 apresenta os princípios básicos da teoria de ondas viajantes e o al-goritmo de localização da falta. Este alal-goritmo utiliza dados coletados em apenas um terminal da linha monitorada. Como o número de casos a serem analisadas é muito grande, optou-se, ao contrário dos capítulos anteriores, por apresentar os resultados dos testes desse algoritmo no capítulo a seguir.
Capítulo 2
Morfologia Matemática
A Morfologia Matemática (MM) é uma teoria apresentada na década de 1960 pelos pesquisadores Georges Matheron e Jean Serra da Escola de Minas de Paris na França, para explorar as formas de imagens extraindo características de interesse (MATHE-RON, 1975), (SERRA, 1982). Posteriormente, a MM foi estendida a imagens com tons de cinza e coloridas. Suas principais aplicações ocorrem em campos como medicina, indústria e automação, no tratamento de imagens microscópicas e de satélite. Algu-mas aplicações no processamento de imagens podem ser vistas em (HUANG; ZHANG, 2010), (WEN-BO et al., 2009) e (YANBIN; WENYONG; ZHENKUAN, 2008). O termo morfologia é usado pois esta técnica explora a forma dos objetos, e o termo matemática se deve ao uso da álgebra como ferramenta de análise desses objetos.
A MM envolve um conjunto denominado Elemento Estruturante (EE) que interage com os dados que representam o objeto a ser analisado, modicando a sua forma e evi-denciando as características de interesse. A forma e o tamanho do EE são escolhidos com base no conhecimento prévio do objeto que será analisado. Desta maneira, para o sucesso da ltragem morfológica é fundamental a escolha de um EE adequado à apli-cação (HUANG; LIU; HONG, 2009), pois, além de extrair dos objetos características similares à sua forma geométrica, o EE ignora características irrelevantes. Em sistemas de energia elétrica os EE mais aplicados são os planares, lineares e triangulares.
Ao longo da última década tem aumentado o interesse na aplicação da MM no tratamento de sinais elétricos devido à sua simplicidade, bom desempenho e eciência computacional. A MM pode ser utilizada no processamento de sinais elétricos de
2.1 Filtros Morfológicos 19
diversas naturezas. Assim, por exemplo, em (JING et al., 2006) a MM é utlizada para detectar faltas internas em transformadores de energia, em (HUANG; LIU; HONG, 2009) a MM é utilizada para a detecção e localização de distúrbios em sinais elétricos e em (JING et al., 2009) utiliza-se a MM para detecção de componentes harmônicos em correntes.
Neste capítulo são apresentados os ltros morfológicos utilizados nesta dissertação. Inicialmente, serão apresentados as operações básicas que compõem os ltros morfológi-cos. Em seguida, serão apresentados o Gradiente Morfológico e o Gradiente Morfológico Multirresolução que serão comparados em uma série de testes experimentais. Por m, será apresentada a Wavelet Morfológica.
2.1 Filtros Morfológicos
Os ltros morfológicos realizam transformações não lineares sobre os sinais, modi-cando localmente suas características geométricas em função do EE utilizado (ZHANG et al., 2002). Desta forma, os ltros morfológicos realizam suas transformações apenas no domínio do tempo, diferentemente de outras transformações mais difundidas como a Wavelet e Fourier, que estão situadas no domínio da frequência. O desempenho dos ltros morfológicos independe do deslocamento de fase e do decaimento da amplitude do sinal. Adicionalmente, a janela de dados requerida nos ltros morfológicos é pe-quena, sendo igual ao número de amostras (tamanho) do EE, permitindo uma rápida resposta às mudanças ocorridas no sinal sob análise (JING et al., 2006).
2.1 Filtros Morfológicos 20
2.1.1 Dilatação
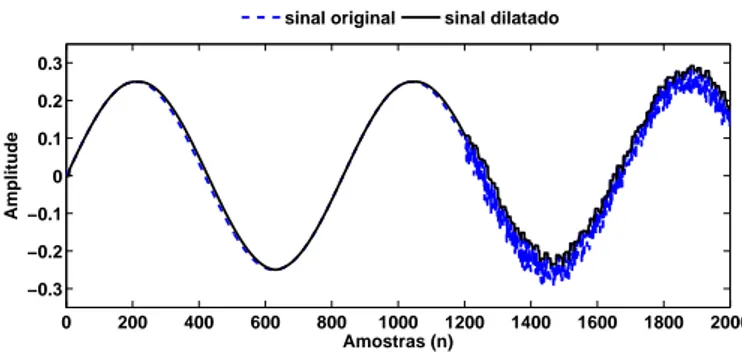
A dilatação é uma transformação morfológica caracterizada pela soma de uma porção do sinal analisado com um EE, seguida da extração de um máximo. A dilatação pode ser denida como segue:
Considere um sinal ou função discretizada f(n) contendo n amostras com
domí-nio Df = {0,1, ..., n− 1} e o EE g(m) contendo m amostras com domínio Dg = {0,1, ..., m−1}, satizfazendo a condição n ≥ m. A dilatação do sinal f(n) pelo EE
g(m), simbolizado pelo operador f⊕g é denida pela Equação 2.1.
(f ⊕g)(n) = max
{
f(n−m) +g(m)
|(n−m)∈Df;m∈Dg
(2.1)
O efeito da aplicação da dilatação sobre um sinal depende da forma e dos valores contidos no EE, bem como da porção do sinal sob análise. Elementos estruturantes planares (g(m) = 0) geralmente são usados para suprimir ruídos, enquanto que EE
2.1 Filtros Morfológicos 21
0 200 400 600 800 1000 1200 1400 1600 1800 2000 −0.3
−0.2 −0.1 0 0.1 0.2 0.3
Amostras (n)
Amplitude
sinal original sinal dilatado
Figura 2.1: Dilatação de um sinal senoidal contendo um ruído branco pelo EE =
{01,02,03, ...,020}
0 200 400 600 800 1000 1200 1400 1600 1800 2000 −0.3
−0.2 −0.1 0 0.1 0.2 0.3
Amostras (n)
Amplitude
sinal original sinal dilatado
Figura 2.2: Dilatação de um sinal senoidal contendo um ruído branco pelo EE =
{01,02,03, ...,010}
2.1.2 Erosão
A erosão é a transformação morfológica realizada no sinal que consiste em subtra-ções de uma região do sinal analisado pelo EE, seguida da extração do mínimo. A erosão pode ser denida como segue:
Seja um sinal discretizado f(n) contendo n amostras e o EE g(m) contendo m
amostras, satisfazendo as condições e os domínios Df eDg denidos na seção anterior. A erosão do sinal f(n) pelo EE g(m), simbolizado pelo operadorf⊖g é denida pela
2.1 Filtros Morfológicos 22
(f ⊖g)(n) = min
{
f(n+m)−g(m)
|(n+m)∈Df;m∈Dg
(2.2)
Da mesma forma que na dilatação, a erosão de um sinal depende do tamanho, da forma do EE e da região do sinal em análise. O mesmo sinal e os mesmos EE's da demonstração realizada na seção anterior são usados para exemplicar uma erosão. Os resultados são mostrados nas Figuras 2.3 e 2.4. Analisando estas guras observa-se que a erosão do sinal pelos EE planares contornou a borda inferior do sinal ruidoso, e da mesma maneira que na dilatação, EE's menores permitem um contorno mais próximo da função.
0 200 400 600 800 1000 1200 1400 1600 1800 2000 −0.3
−0.2 −0.1 0 0.1 0.2 0.3
Amostras (n)
Amplitude
sinal original sinal erodido
Figura 2.3: Erosão de um sinal senoidal contendo um ruído branco pelo EE =
{01,02,03, ...,020}
0 200 400 600 800 1000 1200 1400 1600 1800 2000 −0.3
−0.2 −0.1 0 0.1 0.2 0.3
Amostras (n)
Amplitude
sinal original sinal erodido
Figura 2.4: Erosão de um sinal senoidal contendo um ruído branco pelo EE =
2.2 Gradiente Morfológico (GM) 23
2.2 Gradiente Morfológico (GM)
O Gradiente Morfológico é um ltro morfológico denido pela diferença entre as operações de dilatação e erosão de um sinal f(x) por um mesmo EE g(x).
Matema-ticamente, o GM é denido pela equação 2.3. O GM é adequado para a detecção de bordas em imagens e na detecção de mudanças súbitas em sinais. Destaca-se que o GM não tem relação com o operador gradiente que é geralmente usado na matemática e na engenharia.
Ggrad= (f⊕g)(x)−(f⊖g)(x) (2.3)
2.3 Gradiente Morfológico Multirresolução (GMM)
O Gradiente Morfológico Multirresolução é um ltro morfológico desenvolvido com o objetivo de extrair os transitórios dos sinais analisados ignorando a parcela de regime permanente desses sinais. Sua denição é dada pela Equação 2.6 e é caracterizada pela presença de dois EE's com origens invertidas denominados g+ e
g− para cada nível de decomposição s, sendo que g+ atua para extração da borda de subida do transitório e
g− na extração da borda de descida.
ρsg+ = (ρs−
1
⊕g+)(n)−(ρs−1⊖g+)(n), (2.4) ρs
g− = (ρ
s−1
⊖g−)(n)−(ρs−1
⊕g−)(n), (2.5)
ρs
g(n) = ρ s
g+(n) +ρsg−(n). (2.6)
A formação dos EE's em cada nível de decomposição s é realizada pelas Equações
2.4 Comparação do GM e do GMM 24
g+
=Km{g1, g2, ..., gl−1, gl}, (2.7)
g−=K
m{gl, gl−1, ..., g2, g1}. (2.8)
2.4 Comparação do GM e do GMM
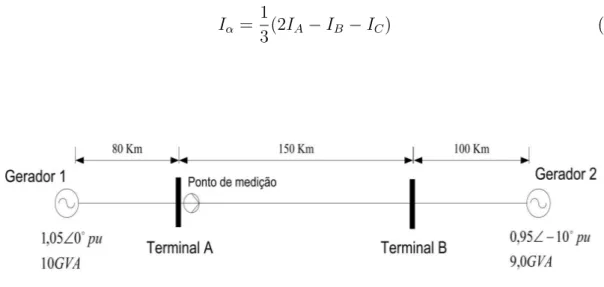
Para avaliar o desempenho geral dos ltros GM e GMM na detecção das frentes das ondas viajantes geradas por uma falta, várias circunstâncias de faltas foram testadas. Os parâmetros variados foram a resistência de falta, o ângulo de incidência da falta, o tamanho do EE e a frequência de amostragem dos sinais. Para isso, foi analisada uma falta fase-terra aplicada à 40 km da barra A no sistema da Figura 2.5. O GM e o GMM foram aplicados sobre o modo aéreo alfa das correntes, obtido pela aplicação da Transformada de Clarke de acordo com a Equação 2.9.
Iα=
1
3(2IA−IB−IC) (2.9)
Figura 2.5: Sistema de transmissão analisado
2.4 Comparação do GM e do GMM 25
Nestas guras, observa-se que o primeiro pico tem amplitude maior no segundo nível de decomposição do que no primeiro nível, adicionalmente, observa-se que no terceiro nível há duplicidade do primeiro pico, o que pode inviabilizar a detecção, isso justica a escolha pelo segundo nível de decomposição.
0.0265 0.0266 0.0267 0.0268 0.02690 0.027 0.0271 0.0272 0.0273 0.0274 0.0275 5
10 15 20 25
Saída do GMM (A)
GMM nível 1
Tempo (s)
Figura 2.6: 1◦ nível de decomposição do GMM
0.0265 0.0266 0.0267 0.0268 0.0269 0.027 0.0271 0.0272 0.0273 0.0274 0.0275 −40 −30 −20 −10 0 10 20 30 40 Tempo (s) GMM nível 2
Saída do GMM (A)
Figura 2.7: 2◦ nível de decomposição do GMM
0.0265 0.0266 0.0267 0.0268 0.0269 0.027 0.0271 0.0272 0.0273 0.0274 0.0275 −60 −40 −20 0 20 40 60
GMM nível 3
Tempo (s)
Saída do GMM (A)
Figura 2.8: 3◦ nível de decomposição do GMM
2.4 Comparação do GM e do GMM 26
no caso da Figura 2.7, observa-se que o primeiro pico do sinal de saída do ltro GMM apresenta polaridade positiva e, portanto, a primeira frente de onda incidente apresenta polaridade positiva. A determinação das polaridades será vital para o desenvolvimento do algoritmo de localização de faltas.
2.4.1 Variação do Tamanho do Elemento Estruturante
Da Figura 2.9 à 2.14 são apresentadas respectivamente as respostas do GM e do GMM para um caso em que o ângulo de incidência é de90◦, a resistência da falta é de
1Ω e os dados de corrente são amostrados a 240 kHz. EE's triangulares de tamanhos
três, cinco e sete foram usados para o GM e EE's lineares com tamanhos quatro, seis e oito foram usados para o GMM.
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200
0 200 400 600
Tempo (s)
Saída do GM (A)
EE = 104[ −1 0 −1 ]
Figura 2.9: GM com EE de três elementos
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200
0 200 400 600
EE =104 [ −2 −1 0 −1 −2 ]
Tempo (s)
Saída do GM (A)
Figura 2.10: GM com EE de cinco elementos
2.4 Comparação do GM e do GMM 27
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200
0 200 400 600
Tempo (s)
Saída do GM (A)
EE = 104[ −3 −2 −1 0 −1 −2 −3 ]
Figura 2.11: GM com EE de sete elementos
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −3000
−2000 −1000 0 1000 2000 3000
Tempo (s)
Saída do GMM (A)
EE = 104[0,1,2,3]
Figura 2.12: GMM com EE de quatro elementos
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −3000
−2000 −1000 0 1000 2000 3000
Tempo (s)
Saída do GMM (A)
EE = 104[0,1,2,3,4,5]
2.4 Comparação do GM e do GMM 28
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −3000
−2000 −1000 0 1000 2000 3000
Tempo (s)
Saída do GMM (A)
EE = 104[0,1,2,3,4,5,6,7]
Figura 2.14: GMM com EE de oito elementos
melhor que os demais ltros analisados nesta seção, já que nele menos oscilações foram observadas. Este comportamento foi conrmado em diversos outros testes realizados.
2.4.2 Variação da Frequência de Amostragem dos Sinais
As respostas do GM e do GMM para frequências de amostragem iguais a 120 kHz, 240 kHz e 480 kHz são mostradas da Figura 2.15 à 2.20. Estas frequências foram escolhidas pois para frequência de amostragem inferior à 120 kHz ca inviável a detecção das ondas viajantes no caso de faltas que ocorrem próximo ao terminal de medição (< 10 km), considerando dados coletados em apenas um terminal da linha.
A frequência de 480 kHz é capaz de retratar o que acontece com o desempenho dos ltros quando a frequência de amostragem é aumentada. Neste caso, o ângulo de incidência é de 90◦, a resistência da falta é de1Ω e os EEs utilizados são mostrados nas Equações 2.10 e 2.11. Como pode se vericar nas guras, à medida que a frequência de amostragem aumenta, os picos se tornam mais evidentes e as oscilações no sinal de saída do ltro são reduzidas. Desta forma, podemos constatar que o desempenho dos ltros morfológicos melhora com o aumento da frequência de amostragem dos sinais.
EEGM = 104[−1,0,−1] (2.10)
2.4 Comparação do GM e do GMM 29
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233
−200 −100 0 100 200 300 400 500 600 700 Tempo (s)
frequência = 120 kHz
Figura 2.15: GM para frequência de amostragem de 120 kHz
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233
−200 −100 0 100 200 300 400 500 600 700 Tempo (s)
frequência = 240 kHz
Figura 2.16: GM para frequência de amostragem de 240 kHz
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233
−200 −100 0 100 200 300 400 500 600 700 Tempo (s)
frequência = 480 kHz
2.4 Comparação do GM e do GMM 30
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233
−3000 −2000 −1000 0 1000 2000 3000
Tempo (s)
frequência = 120 kHz
Figura 2.18: GMM para frequência de amostragem de 120 kHz
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233
−3000 −2000 −1000 0 1000 2000 3000
Tempo (s)
frequência = 240 kHz
Figura 2.19: GMM para frequência de amostragem de 240 kHz
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233
−2500 −2000 −1500 −1000 −500 0 500 1000 1500 2000 2500
Tempo (s)
frequência = 480 kHz
2.4 Comparação do GM e do GMM 31
2.4.3 Variação da Resistência de Falta
Nesta seção avalia-se o desempenho do GM e do GMM na detecção das ondas viajantes frente a variações na resistência de falta. Para tal, novamente foi simulada uma falta à 40 km da barra A, com ângulo de incidência de falta90◦, dados amostrados à 240 kHz e EE's denidos pelas Equações 2.10 e 2.11.
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200 −100 0 100 200 300 400 500 600 700 Tempo (s)
Saída do GM (A)
R = 1 Ohm
Figura 2.21: GM para resistência de falta de1Ω
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200 −100 0 100 200 300 400 500 600 700 Tempo (s)
Saída do GM (A)
R = 50 Ohms
Figura 2.22: GM para resistência de falta de50Ω
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200 −100 0 100 200 300 400 500 600 700 Tempo (s)
Saída do GM (A)
R = 100 Ohms
2.4 Comparação do GM e do GMM 32
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −2000
−1000 0 1000 2000
Saída do GMM (A)
R = 1 Ohm
Tempo (s)
Figura 2.24: GMM para resistência de falta de1Ω
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −2000
−1000 0 1000 2000
Tempo (s)
Saída do GMM (A)
R = 50 Ohms
Figura 2.25: GMM para resistência de falta de 50Ω
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −2000
−1000 0 1000 2000
Tempo (s)
Saída do GMM (A)
R= 100 Ohms
2.4 Comparação do GM e do GMM 33
Os resultados das Figuras 2.29 à 2.26 mostraram que as saídas dos ltros variaram apenas em amplitude, de tal forma que quanto maior a resistência de falta, menor é a amplitude dos picos obtidos a partir dos ltros GM e GMM. Apenas em condições de resistência de falta muito elevadas a detecção das ondas viajantes pode ser dicultada, devido exatamente à amplitude da saída do ltro morfológico, que caracteriza a frente de onda, ser pequena e, consequentemente, é difícil de ser detectada por um algoritmo.
2.4.4 Variação do Ângulo de Incidência de Falta
Como uma falta em um sistema de energia pode acontecer em qualquer instante do ciclo de 60 Hz, é conveniente vericar o comportamento dos ltros morfológicos diante da variação do ângulo de incidência da falta. Para tal, uma falta foi aplicada à 40 km da barra A, com os dados de corrente amostrados a 240 kHz, resistência de falta 1Ω e
EE's conforme Equações 2.10 e 2.11.
Da Figura 2.27 até a 2.32, observa-se que nos casos onde o ângulo de incidência da falta é próximo a zero, as amplitudes dos sinais de saída dos ltros apresentam magnitudes bem inferiores aos demais casos. Isto se deve às baixas magnitudes das correntes para as faltas ocorridas em baixos ângulos de incidência. Em geral, observa-se ainda que para ângulos de incidência baixos, a saída do GMM permanece quase nula na condução pré-falta ao contrário do que se observa na saída do GM.
0.0266 0.0267 0.0268 0.0269 0.027 0.0271 0.0272 0.0273 0.0274 −10
−8 −6 −4 −2 0
Tempo (s)
Saída do GM (A)
0 grau
2.4 Comparação do GM e do GMM 34
0.0245 0.0246 0.0247 0.0248 0.0249 0.025 0.0251 0.0252 0.0253 −100 0 100 200 300 400 500 Tempo (s)
Saída do GM (A)
45 graus
Figura 2.28: GM para ângulo de incidência de falta de45◦
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −200 0 200 400 600 800 Tempo (s)
Saída do GM (A)
90 graus
Figura 2.29: GM para ângulo de incidência de falta de90◦
0.0266 0.0267 0.0268 0.0269 0.027 0.0271 0.0272 0.0273 0.0274 −30 −20 −10 0 10 20 30 Tempo (s)
Saída do GMM (A)
0 grau
Figura 2.30: GMM para ângulo de incidência de falta de0◦
0.0245 0.0246 0.0247 0.0248 0.0249 0.025 0.0251 0.0252 0.0253 −1500 −1000 −500 0 500 1000 1500 Tempo (s)
Saída do GMM (A)
45 graus
2.5 Wavelet Morfológica (WM) 35
0.0225 0.0226 0.0227 0.0228 0.0229 0.023 0.0231 0.0232 0.0233 −2000
−1000 0 1000 2000
Tempo (s)
Saída do GMM (A)
90 graus
Figura 2.32: GMM para ângulo de incidência de falta de90◦
2.5 Wavelet Morfológica (WM)
A Wavelet Morfológica é um método não-linear de decomposição multirresolução de sinais inspirado na teoria de pirâmides e no Esquema Lifting (SWELDENS, 1998). Nas análises multirresolução, o espectro do sinal é decomposto em saídas chamadas de detalhe e aproximação do sinal e, da mesma forma que o sinal é decomposto, ele pode ser reconstruído através de um processo denominado de síntese do sinal.
O processo de análise e síntese de um sinal x no nível j é ilustrado na Figura
2.33, onde os operadores ψ↑ e ω↑ originam, respectivamente, um sinal de aproximação
xj+1 e um sinal de detalheyj+1. A reconstrução do sinal xˆj é realizada aplicando-se os operadores de síntese da aproximaçãoψ↓e detalheω↓a partir dos sinais de aproximação e detalhe do nível de decomposição superior, como segue:
Figura 2.33: Esquema de decomposição e reconstrução de um sinalxj(n)
2.5 Wavelet Morfológica (WM) 36
ψ↑(x
j+1)(n) =min{xj(2n), xj(2n+ 1)} (2.12)
ω↑(x
j+1)(n) = xj(2n)−xj(2n+ 1) (2.13)
ψ↓(x
j)(2n) =ψ↓(xj+1)(2n+ 1) =xj+1(n) (2.14)
ω↓(y
j)(2n) =max{yj+1(n),0}
ω↓(y
j)(2n+ 1) =−min{(yj+1(n),0)} (2.15)
onde n é o número da amostra corrente.
A reconstrução do sinal após a sua decomposição pela WMH é dado pela Equação 2.16,
Ψ↓(x, y)(n) =ψ↓(x)(n) +ω↓(y)(n) (2.16)
O processo de decomposição ou transformação pirâmide de um sinal x0 mostrado
na Figura 2.33 pode ser realizado de forma recursiva, como segue:
x0 → {x1, y1} → {x2, y2, y1} →. . .→ {xj, yj, yj−1, . . . , y1} (2.17)
2.5 Wavelet Morfológica (WM) 37
0 2000 4000 6000 8000
−5000 0 5000
Corrente (A)
Sinal original
0 1000 2000 3000 4000
−5000 0 5000
primeiro nível de aproximação
0 500 1000 1500 2000
−5000 0 5000
segundo nível de aproximação
0 200 400 600 800 1000
−5000 0 5000
Amostras (n) terceiro nível de aproximação
2.5 Wavelet Morfológica (WM) 38
0 100 200 300 400 500
−5000 0 5000
quarto nível de aproximação
0 50 100 150 200 250
−5000 0 5000
quinto nível de aproximação
0 50 100
−5000 0 5000
Corrente (A)
sexto nível de aproximação
0 20 40 60
−5000 0 5000
Amostras (n)
sétimo nível de aproximação