UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DO NORTE
CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Regulador Automático de Tensão Robusto
Utilizando Técnicas de Controle Adaptativo
Suélio Fernandes Carolino
Orientador: Prof. Dr. Flávio Bezerra Costa
Co-orientador: Prof. Dr. Ricardo Lúcio de Araújo Ribeiro
Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Ciências.
Divisão de Serviços Técnicos
Catalogação da publicação na fonte. UFRN / Biblioteca Central Zila Mamede
Carolino, Suélio Fernandes.
Regulador Automático de Tensão Robusto Utilizando Técnicas de Controle Adaptativo / Suélio Fernandes Carolino - Natal, RN, 2013
97 f.: il.
Orientador: Dr. Flávio Bezerra Costa
Co-orientador: Dr. Ricardo Lúcio de Araújo Ribeiro
Dissertação (Mestrado) - Universidade Federal do Rio Grande do Norte. Cen-tro de Tecnologia. Programa de Pós-Graduação em Engenharia Elétrica e de Computação.
1. Regulador automático de tensão - Dissertação. 2. Gerador síncrono de polos salientes - Dissertação. 3. Sistema de potência - estabilizador - Disserta-ção. 4. Superfície deslizante - DissertaDisserta-ção. I. Costa, Flávio Bezerra. II. Ribeiro, Ricardo Lúcio de Araújo. III. Universidade Federal do Rio Grande do Norte. IV. Título.
Regulador Automático de Tensão Robusto
Utilizando Técnicas de Controle Adaptativo
Suélio Fernandes Carolino
Dissertação de Mestrado aprovada em 01 de Fevereiro de 2013 pela banca examinadora composta pelos seguintes membros:
Prof. Dr. Flávio Bezerra Costa (Orientador) . . . ECT/UFRN
Prof. Dr. Ricardo Lúcio de Araújo Ribeiro (Co-orientador) . . . DEE/UFRN
Prof. Dr. Alexandre Cunha Oliveira. . . DEE/UFCG
Agradecimentos
Aos meus orientadores, professores Ricardo Lúcio de Araújo Ribeiro e Flávio Bezerra Costa, pela dedicada orientação e ajuda ao longo desse trabalho.
Ao professor Alexandre Cunha de Oliveira pela excelente revisão realizada no texto dessa dissertação e pelas sugestões.
Ao professor Andrés Ortiz pela contribuição técnica a esse trabalho.
Aos amigos do LEPER, em especial a Thiago de Oliveira, Rodrigo Barreto, Cecílio Mar-tins e Rômulo Lira pela dedicação e grande ajuda durante essa jornada.
Ao amigo Raphaell Maciel pela ajuda na iniciação do mestrado.
À minha família pelo apoio durante esta jornada.
Resumo
A estabilidade de geradores síncronos conectados a rede elétrica tem sido objeto de
estudo e investigações durante anos. O interesse por este assunto é justificado pelo fato de
grande parte da energia elétrica produzida no mundo ser obtida com a utilização de
gera-dores síncronos. Nesse aspecto, muitos trabalhos têm sido propostos utilizando técnicas
de controle convencional e não convencional como lógica fuzzy, redes neurais e
controla-dores adaptativos visando aumentar a margem de estabilidade do sistema quando ele está sujeito a falhas súbitas e distúrbios transitórios. Este trabalho apresenta uma estratégia
de controle robusta não-convencional para a manutenção da estabilidade dos sistemas de
potência e regulação da tensão de saída de geradores síncronos conectados à rede elétrica.
A estratégia de controle utilizada é composta pela integração de uma superfície
desli-zante com um controlador linear. Esta estrutura de controle contribui para a prevenção
dos sistemas de potência de perder o sincronismo após uma falha súbita e regulação da
tensão terminal do gerador após a falta. A viabilidade da estratégia de controle proposta
foi testada experimentalmente em um gerador síncrono de pólos salientes de 5 kVA em
uma estrutura de laboratório.
Palavras-chave: Regulador Automático de Tensão, Superfície Deslizante, Gerador
Abstract
The stability of synchronous generators connected to power grid has been the object
of study and research for years. The interest in this matter is justified by the fact that much
of the electricity produced worldwide is obtained with the use of synchronous generators.
In this respect, studies have been proposed using conventional and unconventional control
techniques such as fuzzy logic, neural networks, and adaptive controllers to increase the
stability margin of the system during sudden failures and transient disturbances. This mas-ter thesis presents a robust unconventional control strategy for maintaining the stability of
power systems and regulation of output voltage of synchronous generators connected to
the grid. The proposed control strategy comprises the integration of a sliding surface with
a linear controller. This control structure is designed to prevent the power system losing
synchronism after a sudden failure and regulation of the terminal voltage of the generator
after the fault. The feasibility of the proposed control strategy was experimentally tested
in a salient pole synchronous generator of 5 kVA in a laboratory structure.
Keywords: Automatic Voltage Regulator, Sliding Surface, Salient Pole Synchronous
Sumário
Sumário i
Lista de Figuras iii
Lista de Tabelas v
Lista de Símbolos vii
Lista de Abreviaturas e Siglas x
1 Introdução 1
1.1 Motivação . . . 4
1.2 Objetivos . . . 4
1.3 Contribuições . . . 5
1.4 Organização do Trabalho . . . 6
2 Estado da Arte 7 2.1 Controladores Convencionais . . . 7
2.2 Controladores não Convencionais . . . 8
2.3 Resumo da Revisão Bibliográfica . . . 11
3 Gerador Síncrono 13 3.1 Máquina Síncrona . . . 13
3.2 Descrição Matemática da Máquina Síncrona . . . 14
3.2.1 Equações do Estator . . . 14
3.2.2 Equações do Rotor . . . 16
3.3 A Transformada de Park 0dq . . . . 17
3.4 Modelagem do Gerador Síncrono . . . 19
3.4.1 Modelo Linear de Heffron e Phillips . . . 20
3.5 Conclusão . . . 26
4 Sistema de Excitação do Gerador Síncrono 27 4.1 Estrutura Geral de um Sistema de Excitação . . . 27
4.2 Regulador Automático de Tensão (AVR) . . . 28
4.3 Estabilizador de Sistema de Potência (PSS) . . . 30
4.4 Conclusão . . . 32
5 Técnicas de Controle Adaptativo 33 5.1 Tipos de Controladores Adaptativos . . . 33
5.2 Controle de Modos Deslizantes . . . 36
5.3 Controlador Adaptativo Proposto . . . 38
5.3.1 Alocação de Polos . . . 40
5.4 Implementação do controlador SM-PI . . . 45
5.5 Conclusão . . . 46
6 Resultados Experimentais 47 6.1 Plataforma de Desenvolvimento Experimental . . . 47
6.2 Ensaio 1: Falta Monofásica na Linha de Transmissão . . . 49
6.3 Ensaio 2: Falta Trifásica na Linha de Transmissão . . . 52
6.4 Ensaio 3: Abertura da Linha de Transmissão . . . 55
7 Conclusões 57
7.1 Conclusões Gerais . . . 57
7.2 Trabalhos Futuros . . . 58
Referências bibliográficas 59 A Ensaios laboratorial 64 A.1 Equipamentos Utilizados para o Ensaio Laboratorial . . . 64
A.2 Ensaio de Circuito Aberto . . . 65
A.3 Curva do Entreferro . . . 66
A.4 Ensaio de Curto-circuito . . . 67
A.5 Ensaio de Escorregamento para Determinação de xd e xq . . . 68
B Descrição da Plataforma Experimental 71 B.1 Bancada Experimental para Implementação dos Controladores . . . 71
B.1.1 Sensores de Tensão e de Corrente . . . 71
B.1.2 DSP . . . 72
B.1.3 Conversores Estáticos . . . 72
B.2 Conjunto Motor de Corrente Contínua e Gerador Síncrono . . . 73
B.3 Emulador do Sistema Elétrico de Potência . . . 74
B.4 Dificuldades Encontradas . . . 76
C Operações Aritméticas para a Implementação dos Controladores 77
Lista de Figuras
1.1 Formas de geração da energia elétrica. . . 2
3.1 Modelo simplificado da máquina síncrona: (a) circuito do rotor; (b) cir-cuito do estator. . . 13
3.2 Tensão com a transformada de Park. . . 18
3.3 Máquina síncrona conectada ao barramento através da impedância rs+jxs. 19 3.4 Estrutura do modelo de Heffron e Phillips. . . 20
4.1 Sistema de excitação de um gerador síncrono. . . 27
4.2 Estrutura clássica de um AVR. . . 28
4.3 Estrutura de um PSS convencional. . . 30
4.4 Estrutura de um PSS adaptativo. . . 32
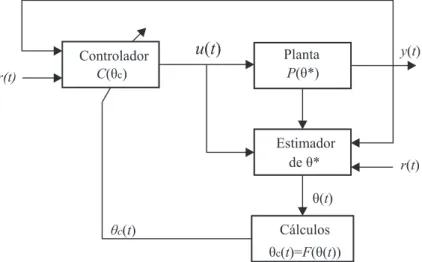
5.1 Diagrama de blocos de um controlador adaptativo. . . 34
5.2 Diagrama de blocos de um controlador adaptativo indireto. . . 35
5.3 Diagrama de blocos de um controlador adaptativo direto. . . 36
5.4 Superfície de deslizamento de controlador SMC. . . 37
5.5 Diagrama de blocos SM-PI. . . 38
5.6 Malha de controle proposta. . . 39
5.7 Polos complexos com partes real e imaginária iguais. . . 41
5.8 Lógica de implementação do SM-PI. . . 45
6.1 Diagrama elétrico da plataforma de desenvolvimento experimental. . . 47
6.2 Comparação entre o SM-PI e o PI na tensão edq do gerador síncrono. . . . 50
6.3 Potência ativa no sistema durante a falta. . . 51
6.4 Ângulo de carga do gerador síncrono. . . 52
6.5 Velocidade do gerador síncrono durante a falta trifásica. . . 53
6.6 Frequência do sistema durante a falta trifásica. . . 54
6.7 Tensão edqdo gerador durante a abertura da linha de transmissão. . . 55
A.1 Esquema de ligação da plataforma experimental. . . 65
A.2 Curvas do entreferro, curva de circuito aberto e curva de curto-circuito. . 67
A.3 Esquema de ligação para o ensaio de escorregamento. . . 68
A.4 Ensaio de escorregamento. . . 69
B.1 Bancada experimental desenvolvida no laboratório. . . 73
B.2 Conjunto máquina de corrente continua e gerador síncrono. . . 74
Lista de Tabelas
1.1 Publicações dos resultados da dissertação e de seu desdobramento. . . 5
2.1 Resumo da revisão bibliográfica. . . 11
6.1 Parâmetros dos controladores utilizados nos três ensaios. . . 49
6.2 Parâmetros do ensaio 1. . . 50
6.3 Comparação do controlador PI com o SM-PI para o ensaio 1. . . 51
6.4 Parâmetros do ensaio 2. . . 52
6.5 Comparação PI com o SM-PI para o ensaio 2 (velocidade). . . 53
6.6 Comparação PI com o SM-PI para o ensaio 2 (frequência). . . 54
6.7 Comparação PI com o SM-PI para o ensaio 3. . . 55
A.1 Parâmetros da máquina de corrente contínua. . . 64
A.2 Parâmetros de placa da máquina síncrona de polos salientes. . . 65
A.3 Valores da tensão e corrente do ensaio de escorregamento. . . 69
A.4 Parâmetros da máquina síncrona eixo: d e q. . . 69
A.5 Parâmetros da máquina síncrona: Lmd e Lmq. . . 70
A.6 Parâmetros do Gerador Síncrono. . . 70
B.1 Parâmetros da linha e simulador de distúrbios. . . 74
C.1 Operações aritméticas necessárias para a implementação das estratégias de controle. . . 77
Lista de Símbolos
Aη∗ Polinômio utilizado como referência para o cálculo dos controladores
Ce, Cm Conjugado elétrico e conjugado mecânico
C[θc(t)] Modelo do controlador
δ Ângulo entre o eixo q e o vetor tensão do barramento
∆δ Variação do ângulo de potência
∆P Variação de potência
∆ω Variação da velocidade do gerador síncrono
eacc Tensão de armadura nominal do motor de corrente continua
ea, ebe ec Tensão de fase do gerador síncrono
ed, eq Tensão de eixo direto e em quadratura do gerador, respectivamente
e∗dq Módulo da tensão do barramento (valor de referência)
ef d Tensão de campo do gerador
e∗f d Tensão de campo do gerador (valor de referência)
es Matriz de tensão de armadura do gerador síncrono
e∞ Tensão do barramento infinito
f , g, h Funções não-lineares
fs Frequência das tensões geradas à velocidade nominal
Gc(s) Função de transferência do controlador
Ges(s) Função de transferência do gerador síncrono
iacc Corrente de armadura nominal do motor de corrente continua
ia, ibe ic Corrente de fase do gerador síncrono
id, iq Corrente de eixo direto e em quadratura do gerador, respectivamente
if d Corrente de campo do gerador
ikd e ikq Corrente nos enrolamentos amortecedores nos eixos d e q ,
respectiva-mente
i0dq, e0dq e
λ0dq
Matrizes de corrente, tensão e fluxo obtidos através da transformada de
Park
ir Matriz de correntes do rotor
is Matriz de corrente de armadura do gerador síncrono
isnom Corrente de armadura nominal do gerador síncrono
K1· · ·, K6 Coeficientes do modelo de Heffron e Philips
˜kp, ¯kp, k+p,
k−p e kηp
Ganhos proporcionais do controlador SM-PI
˜ki, ¯ki, k+i ,
k−i e kiη
Ganhos integrais do controlador SM-PI
La f d, Lb f de
Lc f d
Indutância mútua entre as bobinas do estator e rotor
Lf d Indutância do enrolamento de campo
Lk f d Indutância do enrolamento amortecedor do eixo d
Ls, Lr Matriz de indutâncias próprias entre bobinas do estator e entre bobinas
do rotor, respectivamente
λd,λq Fluxo de eixo direto e em quadratura respectivamente
λs,λr Fluxos do estator e rotor, respectivamente
λa,λbeλc Fluxo em cada fase do gerador síncrono
λf d Fluxo de campo
λs Matriz de fluxo das fases do gerador síncrono
Mo% Percentual de overshoot
Ms, Mr Matriz de indutâncias mútuas entre duas bobinas do estator e entre duas bobinas do rotor, respectivamente
Mrs, Msr Matriz de indutâncias mútuas entre bobinas do estator e do rotor,
res-pectivamente
M Constante de inércia do gerador
ncc Velocidade nominal do motor de corrente continua
P, P−1 Transformadas de Park
P(θ∗) Função de transferência da planta
Pmcc Potência ativa do motor de corrente continua
Ra, Rb e Rc Resistência de armadura do gerador síncrono
Rf d Resistências do campo
Rkd e Rkq Resistências dos enrolamentos amortecedores dos eixos d e q,
respecti-vamente
Rs Matriz de resistência das fases do gerador síncrono
rs, xs Resistência e reatância entre o gerador e o barramento infinito,
respec-tivamente
σ Superfície de deslizamento do SM-PI
θc(t) Parâmetros do controlador
θ∗ Parâmetros da planta
θ(t) Estimativa paraθ∗em um determinado instante t
Pc(θ∗c) Módulo da planta em função dos parâmetros do controlador
Tes(s) Função de transferência em malha fechada do controlador com o mo-delo do gerador
tss2%η Tempo de estabilização da planta levando-se em conta o critério de 2%
τ′
d0 Constante de tempo de eixo direto em circuito aberto do gerador
ε Erro entre o valor de referência e o valor medido
Xodq Variável obtida através da transformada de Park
xd, xq Reatância síncrona de eixo direto e em quadratura do gerador,
respecti-vamente
x′d Reatância transitória de eixo direto do gerador
Z(s), R(s),
P(s)e R(s)
Polinômios
Lista de Abreviaturas e Siglas
ANEEL Agência Nacional de Energia Elétrica
APEC Applied Power Electronics Conference and Exposition
APPC Adaptive Pole Placement Control
AVR Automatic Voltage Regulator
CA Corrente Alternada
CC Corrente Continua
CL Carga Linear
CNPq Conselho Nacional de Desenvolvimento Cientifico e Tecnológico
DEE Departamento de Engenharia Elétrica
DSP Digital Signal Processing
FMM Força magnetomotriz
GS Gerador síncrono
HOSM Higher Order Sliding Modes
IEEE Institute of Electrical and Electronic Engineers
INDUSCON International Conference on Industry Application
LEPER Laboratório de Eletrônica de Potência e Energias Renováveis
LTI Linear Time Invariant
MCC Motor de Corrente Continua
MRAC Model Reference Adaptive Control
PI Controlador Proporcional Integral
PID Controlador Proporcional Integral Derivativo
PSS Power System Stabilizer
PWM Pulse Width Modulation
RNA Rede Neural Artificial
SEP Sistema Elétrico de Potência
SM Sliding Mode
SMC Sliding Mode Control
UFRN Universidade Federal do Rio Grande do Norte
VSI Voltage Source Inverter
Capítulo 1
Introdução
A energia elétrica é responsável por grande parte dos avanços tecnológicos,
tornando-se a principal fonte de luz, calor e força do mundo moderno. No Brasil, a energia elétrica
é produzida em usinas, normalmente hidrelétrica, que são geralmente construídas longe
dos centros consumidores. Um sistema elétrico de potência (SEP) é comumente dividido
em subsistemas, tais como:
• Sistema de Geração - compreende o processo de conversão de energia elétrica por meio de diversas fontes primárias, tais como fontes térmicas, hidráulicas, solar e
eólica;
• Sistema de Transmissão - está associado ao “transporte” da energia elétrica através de linhas de transmissão de médias e longas distâncias;
• Sistema de Distribuição - está associado ao “transporte” da energia elétrica do ponto de chegada da transmissão até cada consumidor;
• Consumidores - indústrias e residências que utilizam a energia elétrica.
Dentre os componentes do SEP, o sistema de geração exerce um papel fundamental,
compreendendo todo o processo de conversão de energia de uma fonte primária (recurso
natural) em eletricidade. As principais formas de geração de energia elétrica são
CAPÍTULO 1. INTRODUÇÃO 2
Térmica Mecânica Elétrica Fóssil
Nuclear Biomassa Solar
Conversão de Energia
Hidro
Eólica Solar
Figura 1.1: Formas de geração da energia elétrica.
No Brasil, o sistema de geração tem forte predominância por usinas hidrelétricas. Segundo dados da ANEEL (2012), 65,57% da energia elétrica produzida no país é
prove-niente desta forma de conversão de energia, seguida da geração por meio de termelétricas,
que corresponde a 26,76% da produção energética. Portanto, 92,33% da energia
produ-zida no Brasil vem dessas duas formas de conversão. A energia elétrica proveniente de
hidrelétricas e termelétricas é produzida por geradores síncronos que são classificados
pelo aspecto construtivo do seu rotor em geradores síncronos de polos lisos ou geradores
síncronos de polos salientes. Os geradores síncronos de polos lisos são acionados
meca-nicamente por turbinas a vapor (usinas termelétricas) em altas velocidades, na ordem de 3600 rpm ou 1800 rpm, dependendo da quantidade de polos do rotor. Por outro lado, os
geradores síncronos de polos salientes são acionados mecanicamente por turbinas
hidráu-licas (usinas hidrelétricas) em baixas rotações, normalmente menores que 900 rpm. Com
isso, os geradores síncronos de polos salientes possuem um número elevado de polos no
rotor e, consequentemente, os seus rotores são maiores que os de polos lisos.
Em geral, os geradores síncronos operam conectados a um sistema de alimentação
conhecido como barramento infinito, nos quais a tensão e a frequência raramente mudam de valor (SEN, 1997). Os benefícios de diversos geradores funcionando em paralelo, do
ponto de vista da geração, são aumento na flexibilidade e na facilidade de manutenção,
visto que em uma configuração paralela, por exemplo se um gerador falhar, as cargas
são redistribuídas entre as outras unidades do sistema. Além disso, com vários geradores
disponíveis, manutenções e reparos preventivos podem ser programados, pois os demais
geradores irão continuar atendendo a demanda do sistema (BEKIROGLU; BAYRAK,
2009). Fan e Liao (2012) mostraram que apesar da confiabilidade dos geradores operando
interligados, eles estão sujeitos a falhas, transitórios rápidos e harmônicos que podem fazê-los perder o sincronismo com o sistema ou diminuir o seu desempenho. Se esses
CAPÍTULO 1. INTRODUÇÃO 3
região de instabilidade, podendo ser retirados de operação.
Tradicionalmente, os problemas de estabilidade em SEPs residem na manutenção do
gerador funcionando em sincronismo com o barramento. Deste ponto de vista, a
estabi-lidade é influenciada pelas dinâmicas do rotor dos geradores e as relações de
potência-ângulo dos mesmos, sendo conhecida como estabilidade de potência-ângulo do rotor (KUNDUR,
1994). A estabilidade do SEP também pode ser influenciada sem que ocorra a perda de
sincronismo do gerador com o barramento. Neste caso, o problema se trata em manter as
tensões em níveis pré-estabelecidos apesar de variações de cargas no sistema. Esta forma
de estabilidade é conhecida como estabilidade de tensão (KUNDUR, 1994). Portanto, o SEP deve ser capaz de permanecer estável apesar de estar sujeito a distúrbios,
pertuba-ções e variapertuba-ções de carga. Basler e Schaefer (2007) relatam que entre os anos de 1950
e 1960 as unidades de geração de energia começaram a ser equipadas com reguladores
automáticos de tensão (AVR, do inglês Automatic Voltage Regulator). Esses
regulado-res são os principais componentes do sistema de excitação do gerador síncrono, tendo
como principal função regular a tensão terminal fornecida pelo gerador, aumentar o
de-sempenho quando ocorrem transitórios e assegurar a estabilidade do SEP na ocorrência de
perturbações externas e/ou variações paramétricas (DEMELLO; CONCORDIA, 1969).
Os estabilizadores do sistema de potência (PSS, do inglês Power System Stabilizer)
também podem ser incluídos nos AVRs (BASLER; SCHAEFER, 2007). Os PSSs têm
como função amortecer oscilações do rotor do gerador síncrono, adicionando um sinal
estabilizante auxiliar no controle de excitação do gerador. Para conseguir proporcionar
esse amortecimento, o PSS deve ser capaz de produzir um conjugado elétrico em fase
com as variações de velocidade do rotor do gerador. Desta forma, o sinal de saída do PSS
é aplicado ao ponto de soma do AVR.
O conjunto AVR-PSS é implementado utilizando técnicas de controle convencionais,
sendo o controlador Proporcional Integral Derivativo (PID) o mais utilizado nas usinas
de geração de energia, com o cálculo dos seus ganhos baseados no modelo linearizado
do sistema (PADIYAR, 2008). No entanto, pelo fato do sistema possuir características
não lineares, controles não convencionais também têm sido utilizados para melhorar a resposta do sistema, a exemplo dos controladores baseados em lógica fuzzy, redes neurais
artificiais e técnicas de controle adaptativo. Os controles não convencionais prometem
aumentar a margem de estabilidade do sistema e deixar o sistema mais robusto a
pertur-bações e condições adversas. No entanto, essas técnicas de controle, na maioria das vezes
são bastante complexas para serem implementadas na prática, seja pela alta carga
CAPÍTULO 1. INTRODUÇÃO 4
trabalho propõe a implementação de uma técnica de controle híbrida, com a utilização da
técnica de controle por modo deslizante (SMC, do inglês Sliding Mode Control) associada ao controlador Proporcional Integral (PI), empregada a um AVR com a finalidade de
au-mentar a margem de estabilidade do sistema sem auau-mentar a complexidade da estratégia
proposta.
1.1
Motivação
Apesar de diversos trabalhos propostos nas últimas décadas sobre os reguladores
au-tomáticos de tensão aplicados a geradores síncronos, ainda existe a possibilidade de
me-lhorias na sua concepção, visto que os AVRs baseados nos controladores convencionais
garantem a estabilidade do sistema apenas em torno do ponto de operação ao qual foram
projetados, enquanto que estratégias de controle não convencionais apresentam alta carga computacional e complexidade no projeto. Nesse cenário, a concepção de um AVR com
característica híbrida que contemple a facilidade de projeto do controlador convencional
com a característica de auto-ajuste de controladores não convencionais sem que para isso
seja necessário uma carga computacional elevada é a principal motivação do estudo dos
reguladores de tensão.
1.2
Objetivos
Esse trabalho tem como objetivo o desenvolvimento e implementação de um
regu-lador de tensão robusto, de simples implementação, que apresente desempenho superior
as estratégias de controle convencionais e que seja equivalente as estruturas de controle adaptativa.
Os objetivos específicos são:
• Implementação do controlador em DSP;
• Avaliação do desempenho do controlador proposto mediante testes experimentais realizados no laboratório com um protótipo reduzido de um sistema elétrico de
potência;
CAPÍTULO 1. INTRODUÇÃO 5
1.3
Contribuições
As principais contribuições são:
• Obter um controlador robusto para o regulador de tensão de fácil implementação e que reduz o chaterring oriundo da técnica SMC;
• O controlador proposto se adequa às novas situações sem a necessidade de estima-tivas paramétricas da planta;
• Possibilidade de implementação do controlador proposto nos AVRs utilizados nas usinas de geração de energia elétrica, visto que o algoritmo do controlador proposto
possui uma rotina de controle similar ao controlador convencional PI.
No que diz respeito às publicações dos resultados da dissertação e de seu
desdobra-mento, apresentam-se na Tabela 1.1 as publicações em periódicos e anais de congressos.
Tabela 1.1: Publicações dos resultados da dissertação e de seu desdobramento.
Evento/Periódico Título Autores
International Conference on
Industry Applications
(IN-DUSCON), 2012 Fortaleza
Comparison Between two
Ver-sions of the Discrete Wavelet
Transform for Real-Time
Tran-sient Detection on Synchronous
Machine Terminals*
F.B. Costa, C. M. S. Neto,
S. F. Carolino, R. L. A.
Ri-beiro, R. L. Barreto, T. O.
A. Rocha, P. Pott
Applied Power Electronics
Conference and Exposition
(APEC), 2013, Long Beach,
USA
Enhanced Power Quality
Com-pensation in PV Single-Phase
Grid-Tied Systems**
R. L. A. Ribeiro, T. O. A.
Rocha, R. L. Barreto e S. F.
Carolino
CAPÍTULO 1. INTRODUÇÃO 6
1.4
Organização do Trabalho
Este trabalho está organizado em sete capítulos e três apêndices da seguinte forma:
• Capítulo 1: Apresenta-se a introdução e a contextualização do tema;
• Capítulo 2: Apresenta-se o estado da arte dos SEPs, os principais componentes do sistema de controle para a sua estabilização e uma revisão geral das técnicas de
controle utilizadas nos AVRs e nos PSSs.
• Capítulo 3: Apresenta-se o modelo linear de Heffron e Phillips para o gerador sín-crono conectado ao barramento infinito através de uma impedância externa.
Tam-bém é apresentada a função de transferência utilizada para o cálculo dos controla-dores convencionais e do controlador SM-PI.
• Capítulo 4: Apresenta-se o sistema de excitação do gerador síncrono, os regulado-res de tensão e os PSSs, mostrando-se as características dos PSSs convencionais e
não-convencionais.
• Capítulo 5: Apresentam-se as técnicas de controle adaptativas direta e indireta. Também é apresentado o procedimento realizado para o projeto do controlador
SM-PI proposto.
• Capítulo 6: Apresentam-se os resultados experimentais do controlador proposto obtidos com um modelo em escala laboratorial de um sistema elétrico de potência,
composto por um gerador síncrono de pólos salientes de 5 kVA e uma máquina de corrente continua, linhas de transmissão e cargas lineares, com o objetivo de emular
de maneira reduzida um sistema real de maior porte.
• Capítulo 7: Apresentam-se as conclusões do trabalho e perspectivas de trabalhos futuros;
• Apêndice A: Apresentam-se os ensaios laboratoriais realizados para a obtenção dos parâmetros da máquina síncrona;
• Apêndice B: Apresentam-se detalhes da montagem experimental;
Capítulo 2
Estado da Arte
Apresenta-se nesse capítulo o estado da arte referente as estratégias de controle
con-vencionais e não concon-vencionais utilizadas nos reguladores automáticos de tensão.
2.1
Controladores Convencionais
Na literatura são propostas diversas estratégias de controle para o conjunto AVR-PSS,
nas quais muitas delas baseiam-se em estratégias de controle convencionais, tais como
controlador Proporcional Integral (PI), Proporcional Integral Derivativo (PID) e
controla-dor avanço-atraso (Lead-Lag) (BA-MUQABEL; ABIDO, 2006), (BERA; DAS; BASU,
2004) assim como nos esquemas de controle preditivo, no qual a ação de controle é
base-ada nos valores atuais e futuros das variáveis relevantes. A ação rápida dos controladores
convencionais de ganhos fixos é necessária para manter a estabilidade do SEP, visto que
uma resposta lenta do controlador ou um atraso na sua atuação pode levar o gerador a perder o sincronismo com o sistema (AMAN et al., 2011).
Em geral, a modelagem adotada nos esquemas de controle convencionais inclui o
modelo linear de um gerador síncrono conectado a um barramento infinito, escrito na
de-composição da transformada de Park d-q, cujos parâmetros são normalmente conhecidos
e constantes (DEMELLO; CONCORDIA, 1969). Contudo, deve ser enfatizado que em tais abordagens as variações das condições de operação do sistema não são modeladas.
Padiyar (2008) mostra a necessidade da linearização do modelo do sistema em torno do
ponto de operação para a regulação dos ganhos do AVR-PSS baseado no controlador
con-vencional. Além disso, a sintonia desse tipo de AVR-PSS varia de acordo com o modo
de oscilação do sistema. Com isso, para cada modo de oscilação, tais como oscilação
CAPÍTULO 2. ESTADO DA ARTE 8
deverá ser alterada. Desta forma, o conjunto AVR-PSS baseado nos controladores
con-vencionais apresentam bom desempenho na compensação das oscilações específicas e mantém o sistema estável apenas em torno do ponto de operação linearizado. No
en-tanto, os SEPs tipicamente apresentam comportamento não-linear (Lü; SUN; MEI, 2001)
e, de acordo com Anderson e Fouad (2002), os limites de regime permanente do SEP
aumentam quando são usados controladores de rápida atuação no conjunto AVR-PSS.
2.2
Controladores não Convencionais
Para superar as limitações dos controladores convencionais, sistemas de controle
que não dependem do modelo do sistema vêm sendo proposto, tais como lógica fuzzy
(HIYAMA; UEKI; ANDOU, 1997),(LOWN; SWIDENBANK; HOGG, 1997),(BHAT,
2004) ou redes neurais artificiais (RNA) (HE; MALIK, 1997),(SWIDENBANK et al., 1999). Apesar de apresentarem bom desempenho se comparado com os controladores
convencionais, esses tipos de controle não garantem a estabilidade do sistema em malha
fechada (MOUNI; TNANI; CHAMPENOIS, 2009), visto que uma base de treinamento
bem representativa é essencial e não se tem garantia de seu desempenho diante de uma
situação nova no caso das RNAs. Além do mais, esse tipo de estratégia de controle
funci-ona como uma caixa preta, no qual não é possível saber a relação entre os parâmetros de
entrada e saída.
O controle linear ótimo também é usado na regulação da tensão terminal do gerador.
Com base no modelo de terceira ordem do gerador, esse tipo de controlador é constituído
por três partes: a identificação de parâmetros, o cálculo dos ganhos de realimentação
pela equação de Ricatti e o controlador. A principal desvantagem desse tipo de técnica
de controle consiste na elevada carga computacional necessária para a identificação de
parâmetros e a solução da equação de Riccati (MAO et al., 1990), (MOUNI; TNANI;
CHAMPENOIS, 2009). Recentemente, estratégia de controle de realimentação não-linear
associada a um sistema de modelagem linear, considerando as variações de carga desco-nhecidas tem sido proposta para melhorar o desempenho do sistema. Os controladores
são desenvolvidos usando o método H∞1e implementado no domínio do tempo (BARA-KAT et al., 2011). O principal objetivo é melhorar o desempenho transitório e garantir
a estabilidade do sistema na presença de variações desconhecidas das condições de
ope-1Técnica de controle robusto que lida com incertezas na representação do modelo da planta.
CAPÍTULO 2. ESTADO DA ARTE 9
ração. O desempenho desse controlador está relacionado com a precisão da modelagem
do sistema, sendo que diferentes estratégias de modelagem são analisadas para que seja obtido um modelo linear global do sistema, tendo em conta a variação de carga
desco-nhecida e a realimentação não-linear do controlador. O desempenho de cada solução é
avaliada usando a síntese do controle H∞e realizados testes experimentais em tempo real.
As estratégias de controle adaptativas também foram propostas na concepção do
con-junto AVR-PSS para assegurar a estabilidade do sistema e suprimir as oscilações de baixa
frequência decorrentes de perturbações que ocorrem na rede elétrica. Nos esquemas de
auto-ajuste, um circuito adaptativo externo é adicionado ao AVR convencional. Neste ci-clo, os parâmetros do sistema são estimados a partir das medições de entrada e de saída
da planta, em geral pelo método dos mínimos quadrados recursivos. Com base nos
pa-râmetros estimados, os coeficientes do AVR são ajustados, de acordo com o método de
concepção escolhido, como o controle linear ótimo (MAO et al., 1990), controle
adapta-tivo (FARSI; ZACHARIAH; FINCH, 1996), controle de variância mínima (WU; HOGG,
1988). Embora essas técnicas de controle sejam diferentes por conta do procedimento
de projeto escolhido, todas elas são procedimentos tipo caixa preta. Além disso, estas
técnicas de controle adaptativas são difíceis de serem implementadas na prática devido a elevada carga computacional e o procedimento para o projeto do controlador não ser
trivial.
Devido aos problemas das estratégias de controle adaptativas, abordagens
simplifi-cadas também vêm sendo propostas. Zhang e Luo (2009) propõem um AVR usando o
algoritmo de mínimos quadrados restritos, uma estratégia de controle adaptativa simples,
com base no modelo de referência (MRAC). Essa lei é definida de tal forma que o
com-portamento do sistema em malha fechada converge para o modelo de referência. No entanto, devido à dinâmica do sistema ser complexa, o modelo de referência que descreva
o comportamento do sistema é comparativamente difícil de se obter. Além disso, a planta
controlada deve cumprir os pressupostos necessários para assegurar a existência de uma
solução assintoticamente estável (ZHANG; LUO, 2009). Esse esquema de controle
pro-mete reduzir a complexidade de implementação, sem perder o desempenho do sistema.
Outra estratégia de controle também utilizada na literatura é o controle por modo
des-lizante (SMC, do inglês Sliding Mode Control)(UTKIN; GULDNER; SHIN, 1999),
de-vido à sua baixa sensibilidade a variações paramétricas e perturbações externas. O SMC
é considerado uma técnica bem adequada para em aplicações com plantas não-lineares,
como é o caso do gerador ligado ao sistema de potência (ABIDI; SABANOVIC, 2007).
CAPÍTULO 2. ESTADO DA ARTE 10
uma máquina ligada ao barramento infinito (LOUKIANOV et al., 2004) ou em sistemas
multi-máquinas (HUERTA; LOUKIANOV; CANEDO, 2009). As variáveis da lei de con-trole alternam rapidamente entre limites extremos. A desvantagem do SMC está no fato
de gerar o chattering podendo com isso provocar vibrações no sistema de energia devido a
dinâmica não modelada da excitatriz (BOIKO et al., 2007). Essas vibrações podem
resul-tar em oscilações mecânicas indesejáveis, o que pode resulresul-tar na imprecisão do controle.
Com o objetivo de reduzir esses efeitos, Loukianov et al. (2011) propuseram uma
aborda-gem baseada na técnica de bloco de controle combinado com o SMC de alta ordem. No
trabalho de Loukianov et al. (2011), um controlador não linear com base na combinação
do bloco de controle de linearização e a técnica do controle por modo deslizante foi
pro-posta. O modelo utilizado para o controle é totalmente não-linear, e leva em conta todas
as interações entre a dinâmica elétrica, a mecânica e as restrições de carga. Um observa-dor não linear para estimar a excitação e os fluxos do rotor e o conjugado mecânico são
utilizados.
Mais recentemente, estruturas híbridas de controle que utilizam as propriedades de
duas ou mais abordagens têm sido concebidas, cada uma tratando de diferentes
necessi-dades do sistema como é o caso do VS-APPC que combina o controle a estrutura variável SMC com o controle por posicionamento de pólos (APPC, do inglês Adaptive Pole
Place-ment Control) ganharam considerável interesse (RIBEIRO; AZEVEDO; SOUSA, 2012).
Isto é conseguido por conta da robustez inerente do SMC a incertezas paramétricas e
aumento da margem de estabilidade promovido pelo controle adaptativo. Essa estrutura
é implementada com a associação do APPC e a técnica de controle a estrutura variável
(SMC), onde os ganhos do controlador são calculados com base nas leis de adaptação das
estimativas paramétricas da planta obtidas pelo SMC. Além da dependência da estimação
dos parâmetros da planta, estas estruturas de controle ainda apresentam uma
implementa-ção de considerável complexidade.
Na mesma linha de concepção das estruturas de controle híbrida, tendo em conta os
problemas relacionados aos reguladores de tensão baseados nos controladores
convenci-onais que são restritos a um ponto de operação e aos controladores não convenciconvenci-onais
que possuem uma elevada carga computacional para implementações práticas e
comple-xos projetos, pretende-se nesse trabalho desenvolver um regulador de tensão robusto que
apresente desempenho superior aos concebidos por estratégias de controle convencionais e sejam equivalentes as estruturas de controle adaptativas e que possua simples
CAPÍTULO 2. ESTADO DA ARTE 11
A estrutura de controle proposta é composta pela integração do SMC com o
contro-lador convencional PI, nos quais os ganhos do PI são calculados pelas leis chaveadas de acordo com a superfície de deslizamento. Essa estrutura de controle apresenta robustez a
distúrbios externos e variações paramétricas, além de possuir chattering reduzido quando
comparada às estratégias que utilizam o SMC convencional.
2.3
Resumo da Revisão Bibliográfica
O resumo da revisão bibliográfica é apresentado na Tabela 2.1, destacando-se as
prin-cipais publicações referentes aos métodos de controle utilizados na regulação da tensão
terminal do gerador síncrono e no amortecimento das oscilações eletromecânicas.
Tam-bém é mostrado se o método utilizado é aplicado apenas no AVR, apenas no PSS ou em
ambos, bem como a forma como esses métodos foram validados, se por simulação (Sim.) ou de forma experimental (Exp.).
Tabela 2.1: Resumo da revisão bibliográfica.
Referência Controlador Aplic. Validação AVR PSS Sim. Exp.
Limebeer e Kasenally (1986) Controle linear ótimo √ - √ -Wu e Hogg (1988) Adaptativo c/ estimação √ - √ -Mao et al. (1990) Controle linear ótimo √ √ √
-Saidy e Hughes (1995) Preditivo √ √ √
-Farsi, Zachariah e Finch (1996) Adaptativo c/ estimação √ - √ -Flynn et al. (1996) Adaptativo c/ estimação √ - √ -Ghazizadeh, Saidy e Hughes (1997) Preditivo √ √ √
-Saidy (1997) Preditivo √ √ √
-Hiyama, Ueki e Andou (1997) Fuzzy √ √ √
-Lown, Swidenbank e Hogg (1997) Fuzzy - √ √
-He e Malik (1997) Rede Neural - √ √
-CAPÍTULO 2. ESTADO DA ARTE 12
Kim e Schaefer (2004) PID √ √ √
-Perez, Mora e Olguin (2006) Adaptativo c/ estimação - √ √ √ Okabe, Fukuoka e Iwamoto (2008) Adaptativo Gain Sheduling - √ √
-Capítulo 3
Gerador Síncrono
Neste capítulo será mostrado o modelo para um sistema de potência composto por
um gerador síncrono ligado a um barramento infinito. O modelo a ser tratado é o modelo linear de Heffron e Phillips (DEMELLO; CONCORDIA, 1969), largamente utilizado na
literatura para o estudo da estabilidade a pequenas perturbações. Nesse modelo, o gerador
síncrono é representado por três enrolamentos do estator e um enrolamento no rotor. São
assumidas condições balanceadas, e as grandezas do estator são refletidas em um sistema
de coordenadas dq por meio da transformada de Park.
3.1
Máquina Síncrona
A máquina síncrona considerada na modelagem é mostrada na Figura 3.1, sendo
cons-tituída de três enrolamentos de fase (a, b e c ) no estator e três enrolamentos no rotor, um
de campo e dois amortecedores.
ikd
ikq
efd
ifd
Eixo-q
Eixo-d
Eixo da fase a θ
a b
c ia
ib
ic
ec
ea
eb
λc
λb
λa
(a) (b)
CAPÍTULO 3. GERADOR SÍNCRONO 14
As seguintes suposições são utilizadas na dedução das equações básicas da máquina
síncrona:
• A FMM (força magnetomotriz) no entreferro é distribuída de forma senoidal e os harmônicos são desprezados;
• A saliência é limitada ao rotor. O efeito das ranhuras do estator são desprezadas; • A saturação magnética e a histerese são ignoradas.
3.2
Descrição Matemática da Máquina Síncrona
As equações elétricas do rotor e do estator são obtidas pela representação da máquina
síncrona mostrada na Figura 3.1.
3.2.1
Equações do Estator
Considerando as tensões no estator (es) como tensões por fase e assumindo que a
máquina síncrona está funcionado na convenção gerador, têm-se para o estator a seguinte
relação.
es=
dλs
dt −Rsis, (3.1)
com
es=
ea eb ec
, λs=
λa λb λc
, is= ia ib ic
, (3.2)
Rs=
Ra 0 0
0 Rb 0
0 0 Rc
, (3.3)
em queλsé o fluxo no estator; Rssão as resistências por fase do estator; issão as correntes por fase do estator.
O fluxo total em cada enrolamento do estator é dado pela soma dos fluxos próprios e
mútuos do estator e o fluxo mútuo entre o rotor e o estator, que resulta em:
CAPÍTULO 3. GERADOR SÍNCRONO 15
em que Ls são as indutâncias próprias do estator; Ms são as indutâncias mútuas entre as
bobinas do estator; Msr são as indutâncias mútuas entre as bobinas do estator e rotor e ir são as correntes do rotor.
A matrizes de indutâncias do estator (Ls) é dada por
Ls=
Laa Lab Lac
Lba Lbb Lbc
Lca Lcb Lcc
, (3.5)
sendo Li jcom i= j a indutância própria da fase i e Li j com i6= j a indutância mútua entre as fases.
As indutâncias mútuas entre o estator e o rotor (Msr) são dadas por
Msr=
La f dcosθ Lakdcosθ −Lakqsenθ
Lb f dcos
θ−2π 3
Lbkdcos
θ−2π 3
−Lbkqsen
θ−2π 3
Lc f dcos
θ+2π
3
Lckdcos
2θ+2π
3
−Lckqsen
θ+2π
3 (3.6)
em que Ls f d é a indutância mútua entre a bobina da fase s do estator e a bobina de eixo
direto do rotor; Lskd é a indutância mútua entre a bobina da fase s do estator e o
enrola-mento amortecedor do eixo direto do rotor; Lskq é a indutância mútua entre a bobina da
fase s do estator e o enrolamento amortecedor do eixo em quadratura do rotor; com s as
fases a, b e c do estator.
A corrente ir é dada por
ir=
if d
ikd
ikq
CAPÍTULO 3. GERADOR SÍNCRONO 16
3.2.2
Equações do Rotor
A aplicação de uma tensão ao terminal de campo do rotor irá resultar em um fluxo. As
tensões nos enrolamentos amortecedores são nulas, pois encontram-se curto-circuitados.
Com isso, tem-se
ef d =
dλf d
dt +Rf dif d, (3.8)
em que ef d é a tensão de campo do gerador;λf d o fluxo de campo; Rf d as resistências do
campo; if d a corrente de campo.
dλkd
dt +Rkdikd=0, (3.9)
dλkq
dt +Rkqikq=0. (3.10)
O fluxo total em cada enrolamento do rotor é dado pela soma dos fluxos próprios entre
os enrolamentos do rotor e os fluxos mútuos entre os enrolamentos do rotor e estator. Não
existe indutância mútua entre os enrolamentos do rotor, visto que eles estão defasados em
90o. Com isso, o fluxo total do rotor é dado por:
λr=Lrir−Mrsis, (3.11)
com
λr=
λf d
λkd
λkq
. (3.12)
As indutâncias próprias do rotor são dadas por
Lr =
Lf d Lk f d 0
Lf dkd Lkd 0
0 0 Lkkq
. (3.13)
CAPÍTULO 3. GERADOR SÍNCRONO 17
Mrs=
−La f dcosθ La f dcos
θ−2π 2
−La f dcos
θ+2π
3
−Lakdcosθ −Lakdcos
θ−2π 3
−Lakdcos
θ+2π
3
Lakqsenθ Lakqsen
θ−2π 3
Lakqsen
θ+2π
3 . (3.14)
3.3
A Transformada de Park 0dq
Dado o modelo da máquina síncrona trifásica representada pelas equações de fluxo e
tensão, pode-se definir uma transformação para as variáveis da máquina (fluxo, corrente
ou tensão) para representá-las por um modelo mais simples que o trifásico.
Uma transformação 0dq das variáveis é definida pela operação:
Xabc=PX0dq, (3.15)
em que Xabc é a variável a ser transformada e X0dq é a variável nova. A matriz P é
denominada matriz de transformação e deve ser regular, ou seja, sua inversa P−1 deve existir.
A matriz P adequada para a obtenção de uma nova representação pode ser obtida a
partir das projeções das variáveis reais (a, b e c) ao longo dos eixos d, q e de um eixo
fixo. A vantagem da utilização do sistema 0dq está relacionada com a simplificação da representação da máquina trifásica em uma máquina de dois eixos, no qual as indutâncias
mútuas e próprias, que no sistema trifásico variam com o tempo, na representação 0dq
são representadas de maneira constante, visto que com a escolha do novo referencial os
dois eixos giram à mesma velocidadeω, do vetor tensão, do fluxo ou do rotor.
O eixo d gira com velocidade ω e se posiciona em um ângulo θ em relação a um ponto de referência, como mostrado na Figura 3.2. Os eixos a, b e c são fixos, enquanto
CAPÍTULO 3. GERADOR SÍNCRONO 18 ia λa ib λb ic λc eixo a eixo b eixo c eixo d eixo q Neq Neq ω θ
Figura 3.2: Tensão com a transformada de Park.
Decompondo as variáveis dos eixos (a, b e c) nos eixos (d e q), tem-se a matriz de transformação, como segue:
P= r 2 3 1 √ 2 1 √ 2 1 √ 2
cos(θ) cos θ−23π cos θ−43π
−sen(θ) −sen θ−23π −sen θ−43π
. (3.16)
As corrente, tensões e fluxos podem ser representadas nesse novo sistema de
referên-cia da seguinte forma:
i0dq=Pis, e0dq=Pes, λ0dq=Pλs, (3.17)
com os vetores corrente, tensão e fluxo dados por:
i0dq=
i0 id iq
, e0dq= e0 ed eq
, λ0dq= λ0 λd λq
CAPÍTULO 3. GERADOR SÍNCRONO 19
3.4
Modelagem do Gerador Síncrono
No modelo padrão, o gerador síncrono trifásico é representado por um estator,
for-mado por três enrolamentos, e um rotor constituído por um enrolamento de campo e dois enrolamentos amortecedores. No referencial dq (rotor), tem-se um modelo de sétima
or-dem de equações diferenciais não-lineares. No entanto, para o estudo de estabilidade são
usados modelos simplificados como os adotados em Demello e Concordia (1969), nos
quais os efeitos dos enrolamentos amortecedores, resistência de armadura e os efeitos da
saturação são desprezados. O modelo é desenvolvido com uma única máquina síncrona
conectada ao barramento infinito (e∞) através de uma impedância externa (rs+jxs), como mostrado na Figura 3.4.
es e 8
rs+jxs
Barramento Infinito Máquina
Síncrona
Figura 3.3: Máquina síncrona conectada ao barramento através da impedância rs+jxs.
As equações que regem o comportamento da máquina síncrona conectada ao
barra-mento infinito através de uma impedância externa segundo Demello e Concordia (1969) são:
ed=
dλd
dt −ωrλq=xs did
dt −ωrxsiq+e∞senδ, (3.19)
eq=
dλq
dt +ωrλd=xs diq
dt −ωrxsid+e∞cosδ, (3.20)
λd=if d−xdid, (3.21)
λq=−xqiq, (3.22)
λf d =if d+τ
′
d0
dλf d
CAPÍTULO 3. GERADOR SÍNCRONO 20
ef d =if d−
xd−x
′
q
id, (3.24)
e2s =e2d+e2q, (3.25)
Cm−Ce=M
d2δ
dt2, (3.26)
em que ed, eq, id e iq são as respectivas tensões e correntes no referencial dq; λd e λq
são os fluxo no referencial dq;ωr é a velocidade síncrona;δé o ângulo entre o eixo q e
o vetor tensão do barramento infinito; xd e xq são as reatâncias síncrona no eixo direto e
em quadratura, respectivamente;λf d é o fluxo de campo; if d é a corrente de campo;τ′d0 a constante de tempo de eixo direto em circuito aberto da máquina; esé a tensão terminal
da máquina; Cm e Ce são os conjugados mecânico e elétrico, respectivamente e M é a
constante de inércia.
3.4.1
Modelo Linear de Heffron e Phillips
No modelo linear de Heffron e Phillips, o gerador é representado por um modelo
de 3a ordem capaz de representar tanto a dinâmica eletromecânica, quanto a dinâmica do campo do gerador, sendo aplicável a estudos de estabilidade do gerador ligado ao
barramento infinito através de uma impedância externa.
A modelagem do SEP constituído por uma máquina síncrona conectada ao
barra-mento infinito por meio de uma impedância externa permite obter as equações
matemáti-cas que inter-relacionam as variáveis das equações 3.19-3.26. Na Figura 3.4 é ilustrada a
estrutura do modelo de Heffron e Philips:
Variáveis de Estado
* Ângulo de torque,δ
* Desvio de velocidade,ωr * Tensão proporcional ao fluxo,λfd
Cm
efd
δ
es
CAPÍTULO 3. GERADOR SÍNCRONO 21
As variáveis do modelo de Heffron e Phillips são classificadas em 3 categorias:
• Variáveis de entrada do sistema:
– Conjugado mecânico da Turbina (Cm). – Tensão de campo do gerador (ef d).
• Variáveis de estado que descrevem a máquina:
– Ângulo de torque (δ).
– Desvio de velocidade (ωr).
– Tensão proporcional ao fluxo (λf d),
• Variáveis de saída:
– Ângulo de torque (δ).
– Tensão terminal da máquina (es).
As equações do modelo são não-lineares, sendo duas delas algébricas e as três
restan-tes diferenciais. As equações algébricas que relacionam o conjugado elétrico e a tensão
terminal às variáveis de estado são da forma:
Ce= f(δ,λf d), (3.27)
es=g(δ,λf d), (3.28)
em que f e g são funções não-lineares.
As equações diferenciais compreendem:
• A equação do balanço de conjugado da máquina:
Cm−Ce=M
d2δ
dt2. (3.29)
• A relação entreωreδ. Supõe-se queωr está expressa em pu eδesteja em radianos. Com isso, tem-se
δ=2πf0×
Z t
0 ωr
CAPÍTULO 3. GERADOR SÍNCRONO 22
• A relação dinâmica entre a tensãoλf d proporcional ao fluxo de eixo direto, o efeito da reação da armadura proporcional aδe a tensão aplicada ao campo do gerador,
ef d, que é do tipo:
Tz
dλf d
dt +λf d =h(δ,ef d), (3.31)
sendo h uma função não-linear.
O modelo de Heffron-Phillips é obtido pela linearização das cinco equações 3.27-3.31
em relação a um ponto de operação, que resulta em:
∆Ce=K1∆δ+K2∆λf d, (3.32)
∆et =K5∆δ+K6∆λf d, (3.33)
∆Cm−∆Ce=M
d∆ωr
dt , (3.34)
∆δ=2πf0×
Z t
0 ∆ωr
(t)dt, (3.35)
K3τ
′
d0
d∆λf d
dt +∆λf d =K3 ∆ef d−K4∆δ
. (3.36)
Escrevendo a equação 3.36 em termos de∆λf d, tem-se
∆λf d =
K3
1+sK3τ′d0
∆ef d−
K3K4
1+sK3τ′d0
∆δ, (3.37)
sendo K1· · ·K6constantes que dependem do ponto de operação considerado eτ
′
d0a cons-tante de tempo de eixo direto em circuito aberto da máquina síncrona.
Da equação 3.32, considerandoλf d constante, o coeficiente K1 é obtido a partir da
seguinte relação:
K1=
∆Ce
∆δ
λ
f d=constante
CAPÍTULO 3. GERADOR SÍNCRONO 23
K1=
xq−x
′
d
iq0
x′d+xs
e∞0senδ0+
λf d
xq+xs
e∞cosδ0, (3.39)
em que K1é a variação no conjugado elétrico, provocada pela variação do ângulo interno,
considerando constante o enlace de fluxo com o eixo direto (λf d =constante). Segundo Demello e Concordia (1969), K1é um coeficiente de conjugado de sincronização.
Da equação 3.32, considerando o ângulo internoδconstante, o coeficiente K2é obtido
a partir da seguinte relação:
K2= ∆
Ce
∆λf d
δ =constante , (3.40)
K2=
1
x′q+xs
e∞0senδ0, (3.41)
em que K2é a variação de conjugado elétrico (∆Ce) provocado pela variação do enlace de fluxo com o eixo direto (∆λf d), considerando o ângulo interno (δ) constante.
O coeficiente K3 depende apenas da impedância da máquina e do sistema de
trans-missão, sendo o único coeficiente que não varia com as condições de operação do sistema,
como segue
K3=
x′d+xs
xd+xs
, (3.42)
A partir da equação 3.36, o coeficiente K4é obtido da seguinte forma:
K4=
1
K3
∆λf d
∆δ
ef d=constante
, (3.43)
K4=
xd−x′d x′d+xs
e∞0senδ0, (3.44)
em que K4 representa o efeito desmagnetizante da reação de armadura sobre o fluxo no
CAPÍTULO 3. GERADOR SÍNCRONO 24
O coeficiente K5é encontrado a partir da equação 3.33, considerandoλf d constante, como segue:
K5=
∆es
∆δ
λ
f d=constante
, (3.45)
K5=
xq
xq+xs
ed0
es0
e∞0cosδ0−
x′d
x′d+xs
eq0
es0
v∞0senδ0, (3.46)
em que K5 representa a variação da tensão terminal (∆es), provocada pela variação do
ângulo interno (∆δ) considerando o enlace de fluxo com o eixo direto (λf d) constante.
Considerando-seδ constante, da equação 3.33, o coeficiente K6 é calculado da
se-guinte forma:
K6=
∆es
∆λf d
δ=
constante
, (3.47)
K6=
xs
x′d+xs
eq0
es0
, (3.48)
em que K6 representa a variação na tensão terminal (∆es) provocada pela variação do enlace de fluxo com o eixo direto (∆λf d), considerando constante o ângulo interno δ
constante.
Da equação 3.33, a variação da tensão terminal (∆es) pode ser relacionada com a
mudança do ângulo (∆δ) e do fluxo por meio dos coeficientes K5e K6. Substituindo-se a
equação 3.37 na equação 3.33, o seguinte modelo dinâmico pode ser obtido:
∆es=
K3K6
1+sK3τ′d0
∆ef d−
K3K4K6+K5
1+sK3τ′d0
1+sK3τ′d0
∆δ. (3.49)
No modelo descrito pela equação 3.49, a constante K6 é sempre positiva, embora a
sua amplitude seja reduzida com o carregamento ou pequenas impedâncias externas. Por
outro lado, a constante K5 pode ter um sinal de amplitude considerável, dependendo das
impedâncias e das condições de funcionamento (DEMELLO; CONCORDIA, 1969).
De-vido a estas características dinâmicas, o regulador de tensão deve ter um comportamento
CAPÍTULO 3. GERADOR SÍNCRONO 25
Separando a equação 3.49 em duas partes, tem-se
∆es=∆e
′
s(s) +∆esδ(s), (3.50)
com
∆e′s(s) = K3K6
1+sK3τ′d0
∆ef d. (3.51)
O segundo termo da equação 3.50 refere-se ao efeito causado pela variação do ângulo
de carga da máquina síncrona, sendo
∆esδ(s) =
K3K4K6+K5
1+sK3τ′d0
1+sK3τ′d0
∆δ. (3.52)
O modelo dinâmico da tensão terminal do gerador, descrito pela equação 3.49, pode
ser representado como a seguinte função de transferência:
Ges(s) =
∆e′s
∆ef d(s)
= b
s+a, (3.53)
com
a= 1
K3τ′d0
, (3.54)
b= K6 τ′
d0
. (3.55)
Com isso, a função de transferência da máquina síncrona que relaciona a variação da tensão terminal (es) pela variação da tensão de campo (ef d) é dada por:
Ges(s) =
K6/τ
′
d0
s+1/K3τ′d0
. (3.56)
A função de transferência da equação 3.56 será utilizada na regulação da tensão
ter-minal do gerador, enquanto o termo dado pela equação 3.52 será considerado uma
CAPÍTULO 3. GERADOR SÍNCRONO 26
3.5
Conclusão
Nesse capítulo foi apresentada a modelagem do gerador síncrono conectado ao
barra-mento infinito, sendo utilizado o modelo de Heffron e Phillips que é capaz de representar
tanto a dinâmica eletromecânica quanto a de campo do gerador síncrono. Também foi apresentada a função de transferência que será utilizada para o cálculo dos ganhos do
Capítulo 4
Sistema de Excitação do Gerador
Síncrono
Neste capítulo será descrito o sistema de excitação do gerador síncrono e seus
prin-cipais componentes, dando maior destaque aos reguladores automáticos de tensão e aos
estabilizadores de sistema de potência.
4.1
Estrutura Geral de um Sistema de Excitação
Segundo Kundur (1994), os sistemas de excitação de geradores síncronos realizam
funções de proteção e controle, imprescindíveis ao desempenho correto dos sistemas de
potência. As suas funções básicas são fornecer e ajustar automaticamente a corrente de
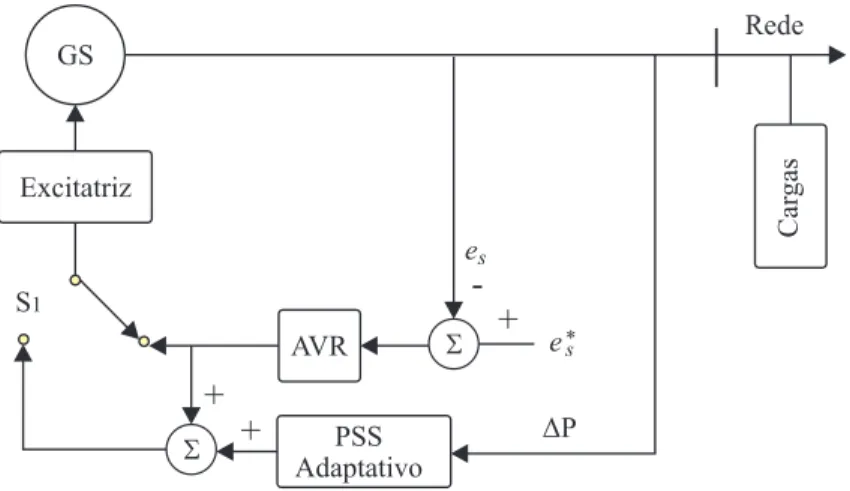
campo do gerador síncrono para manter a tensão terminal dentro de limites aceitáveis de estabilidade. A estrutura de um sistema de excitação é mostrado na Figura 4.1, sendo∆P
a variação de potência,∆δa variação angular e∆ωa variação de velocidade.
AVR Excitatriz Gerador
Sensores
PSS
Δ Δδ ΔωP, ,
es
u
efd
e*s
CAPÍTULO 4. SISTEMA DE EXCITAÇÃO DO GERADOR SÍNCRONO 28
Os sistemas de excitação são compostos basicamente por quatro elementos:
excita-triz, sensores, AVR e PSS. A excitatriz é o elemento responsável por fornecer a corrente de campo necessária ao gerador para controlar a sua tensão terminal. Existem diversos
tipos de excitatrizes, tais como: excitatrizes CC, excitatrizes CA e circuitos retificadores.
Os sensores medem as grandezas de saída do gerador, tais como tensão e corrente, os
quais são processados pelo AVR que fornece em sua saída um sinal para o controle da
ex-citatriz. Um sinal de controle adicional ao AVR pode ser fornecido pelo PSS para reduzir
as oscilações no gerador.
4.2
Regulador Automático de Tensão (AVR)
Os reguladores automáticos de tensão são sistemas de controle usados nas excitatrizes
dos geradores síncronos, que têm como principais funções:
• Controlar a tensão terminal do gerador dentro dos níveis pré-estabelecidos em nor-mas;
• Regular a divisão de potência reativa entre as máquinas que operam em paralelo; • Controlar a corrente de campo para manter o gerador em sincronismo com o
sis-tema;
• Aumentar a excitação sob condições de curto-circuito no sistema, para manter o gerador em sincronismo com os demais geradores do sistema;
• Amortecer as oscilações de baixa frequência que podem trazer problemas de esta-bilidade dinâmica.
A estrutura clássica de um AVR é mostrada na Figura 4.2, sendo composta por
con-troladores convencionais, tais como concon-troladores PID, PI, ou avanço e atraso de fase
(Lead/Lag) (BA-MUQABEL; ABIDO, 2006).
S
-+
AVR
es
es
Gerador Excitatriz efd es
e*fd
*
Figura 4.2: Estrutura clássica de um AVR.
O regulador da Figura 4.2 controla a saída da excitatriz de modo que a corrente gerada