OTIMIZAÇO EM BRAQUITERAPIA DE ALTA
TAXA DE DOSE COM ALGORITMO
TRANSGENÉTICO
Natal
Departamento de Informátia e Matemátia Apliada
Programa de Pós-Graduação em Sistemas e Computação
OTIMIZAÇO EM BRAQUITERAPIA DE ALTA
TAXA DE DOSE COM ALGORITMO
TRANSGENÉTICO
Dissertação de mestrado apresentada à
bana examinadora do Programa de
Pós-Graduação em Sistemas e Computação da
Universidade Federal do Rio Grande do
Norte, omo requisitopara aobtenção do
tí-tulo de Mestre em SistemaseComputação.
Riardo Marx Costa Soares de Jesus
DE DOSE COM ALGORITMO TRANSGENÉTICO
Riardo Marx Costa Soares de Jesus
DissertaçãodemestradoapresentadaàbanaexaminadoradoProgramadePós-Graduação
em Sistemas e Computação da Universidade Federal do Rio Grande do Norte, omo
requisitopara a obtenção dotítulo de Mestre em Sistemase Computação.
BanaExaminadora:
Prof. Dr. Maro Cesar Goldbarg
DIMAp - UFRN
Orientador
Prof a
. Dr a
. Elizabeth FerreiraGouvêa Goldbarg
DIMAp - UFRN
Prof a
. Dr a
. Lúia Valéria Ramos Arruda
CPGEI- UTFPR
Prof. Dr. Henrique Paa Loureiro Luna
Otimização em Braquiterapia de Alta Taxa de Dose om Algoritmo
Transgenétio/ RiardoMarx Costa Soares de Jesus. Natal: 2006.
93p. : xv.
Orientador: Maro CesarGoldbarg
Dissertação (Mestrado) Universidade Federal do Rio Grande do Norte.
Centro de Ciênias Exatas e da Terra. Departamento de Informátia e
boa é que proedem a iênia e a prudênia.
A Deus, por tudo.
À minha família,pelaintensa presença em todos os momentos.
Aos professores de mestrado: Maro, Elizabeth e Thais pelos importantes
ensina-mentos. Novamente, agradeço ao prof. Maro pela oportunidade dada e a valiosa
orientação.
Aosprofessores do urso de Sistemasde Informação doCEULP/ULBRA pelo
pre-ioso apoio.
Aosamigoseolegasquedeformadiretaouindiretaontribuíramparaarealização
deste trabalho.
Aos prossionais do setor de onologia da LIGA Norte-Rio-Grandense ontra o
âner, em espeial à Dr a
Nuruara.
Este trabalhoabordao problemade otimizaçãoem braquiterapiade altataxade dose
notratamentode paientes om âner, om vistasà denição doonjuntode tempos
de parada. A ténia de solução adotadafoi a Transgenétia Computaional apoiada
pelométodoL-BFGS. Oalgoritmodesenvolvidofoiempregadoparagerarsoluçõesnão
dominadasujasdistribuiçõesde dosefossem apazes de eliminaroânereaomesmo
tempo preservaras regiõesnormais.
1 Introdução 2
1.1 Motivação . . . 2
1.2 Justiativa . . . 2
1.3 Objetivos . . . 3
1.4 Organização dotrabalho . . . 3
2 Revisão de Literatura 4 2.1 Câner . . . 4
2.2 Radioterapia. . . 5
2.3 Tratamento radioterápioom braquiterapia . . . 6
2.4 O quepode ser otimizado . . . 11
2.5 Diuldades de solução . . . 12
2.6 Números doproblema . . . 12
2.7 Estado da arte . . . 13
2.8 Abordagens de solução . . . 14
2.9 Transgenétia Computaional . . . 15
2.10 Otimização Multiobjetivo . . . 17
2.10.1 Solução ideal . . . 18
2.10.2 Pareto-dominânia . . . 18
2.10.3 Pareto-otimalidade . . . 18
3.1 Loaleperíodo . . . 23
3.2 Fontes de pesquisa . . . 23
3.3 Hardware . . . 24
3.4 Software . . . 24
3.5 Metodologia . . . 25
4 Resultados e Disussão 28 4.1 Modelagem . . . 28
4.1.1 Representação da solução . . . 28
4.1.2 Fitness . . . 29
4.2 Obtenção de bloos de montagem . . . 34
4.2.1 Impliaçõesalgorítmias . . . 34
4.3 Geração eavaliaçãoda população iniial . . . 36
4.3.1 Vetores de pesos . . . 36
4.3.2 Derivadas . . . 37
4.3.3 Parâmetros utilizados . . . 37
4.4 Geração de agentes . . . 38
4.5 Manipulação de indivíduos . . . 39
4.5.1 Estratégia 1 . . . 39
4.5.2 Estratégia 2 . . . 40
4.6 Proesso imunológio . . . 41
4.7 Experimentos . . . 42
4.7.1 Imagens dos asos de teste . . . 43
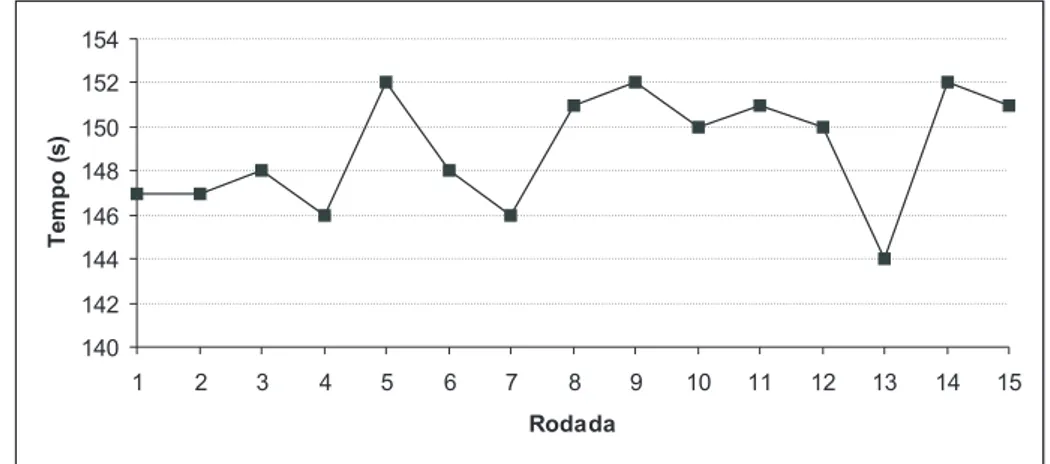
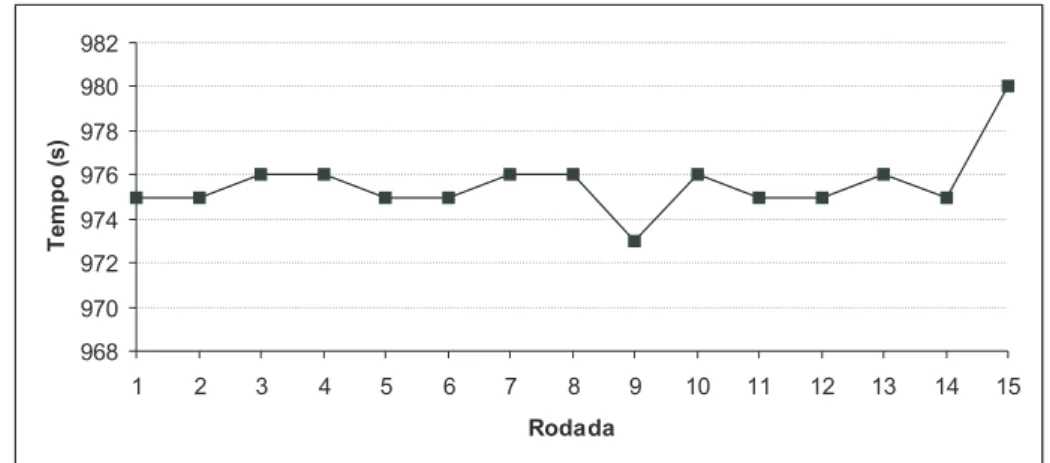
4.7.2 Tempo . . . 47
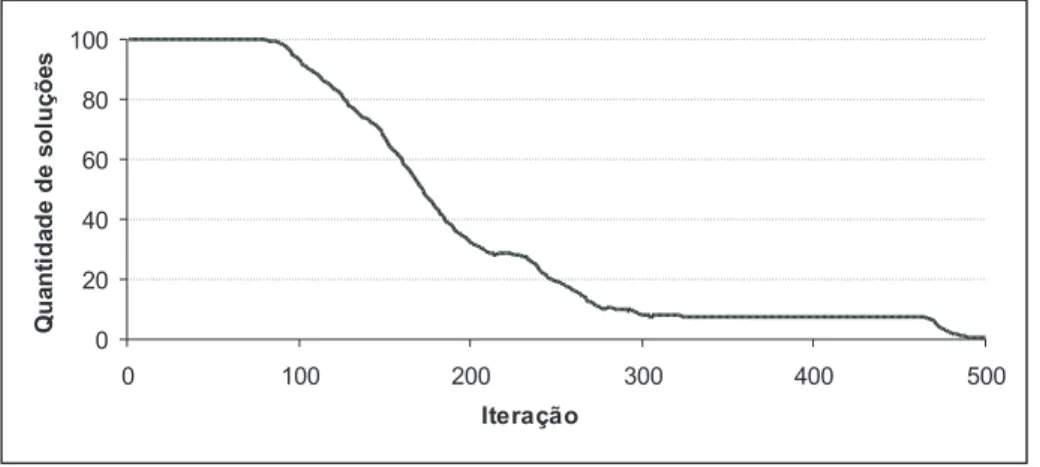
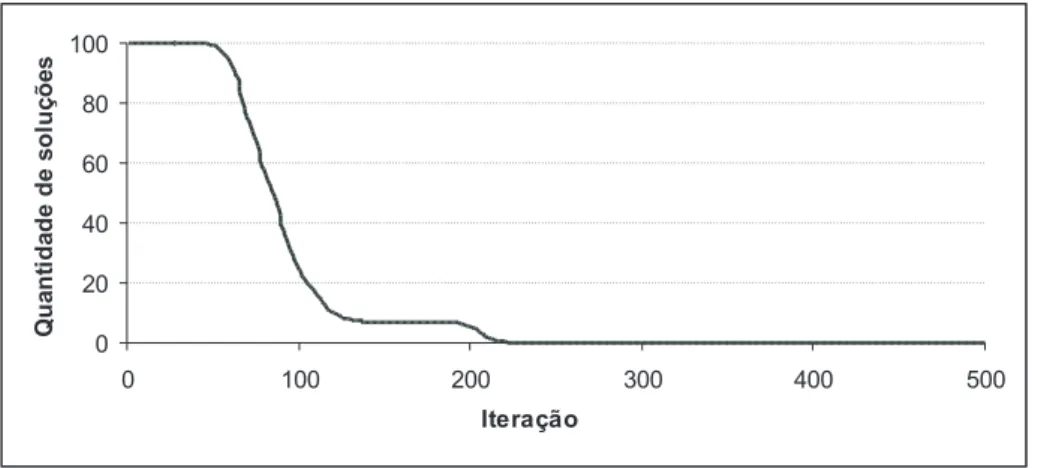
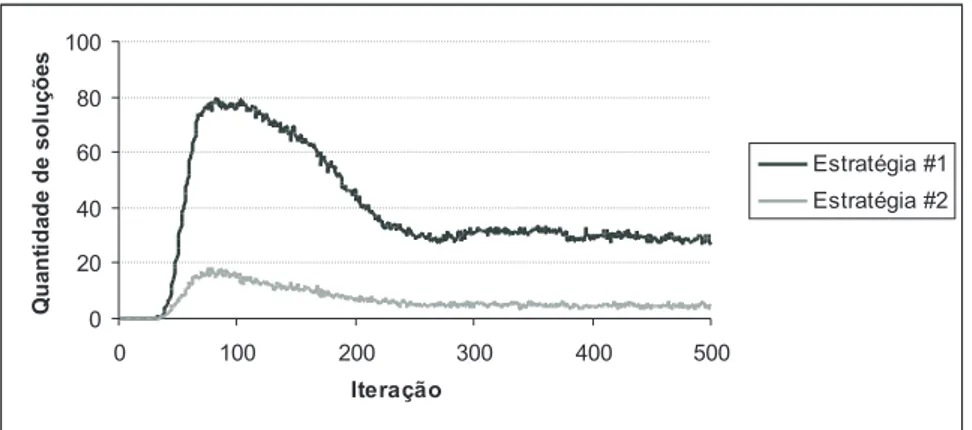
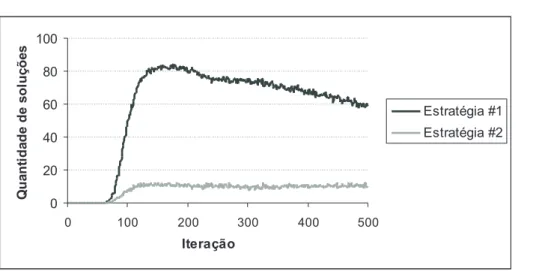
4.7.5 Soluçõesnão dominadas - média poriteração. . . 56
4.7.6 Valores das soluçõesnão dominadas . . . 62
4.7.7 Casos sem êxito . . . 73
5 Considerações nais 76 5.1 Conlusões. . . 76
5.2 Trabalhos futuros . . . 77
A Testes om a bibliotea Unonstrained Optimization 78 B Testes om o método Simplex revisado 87 B.1 Caso 6 . . . 87
B.2 Caso 7 . . . 88
B.3 Caso 8 . . . 88
B.4 Caso 9 . . . 88
2.1 Proesso de arinogênese, retiradode [INCA, 2001℄ . . . 5
2.2 Unidade de pós-argaremota . . . 8
2.3 Um tipode atéter . . . 9
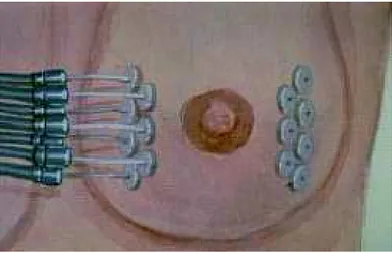
2.4 Exemplo de implantação de atéteres em um típio aso de âner de mama . . . 9
2.5 Conexão de três atéteres àunidade de pós-arga remota . . . 10
2.6 Pseudo-ódigo do algoritmo transgenétioProtoG . . . 16
2.7 Contornos geradosa partir de um aso de ânerde érebro . . . 20
4.1 Representação do romossomo . . . 29
4.2 Pseudo-ódigo do algoritmo VEGA . . . 35
4.3 Imagens dos asos 1 e 2. . . 44
4.4 Imagens dos asos 3,4,5 e 6. . . 45
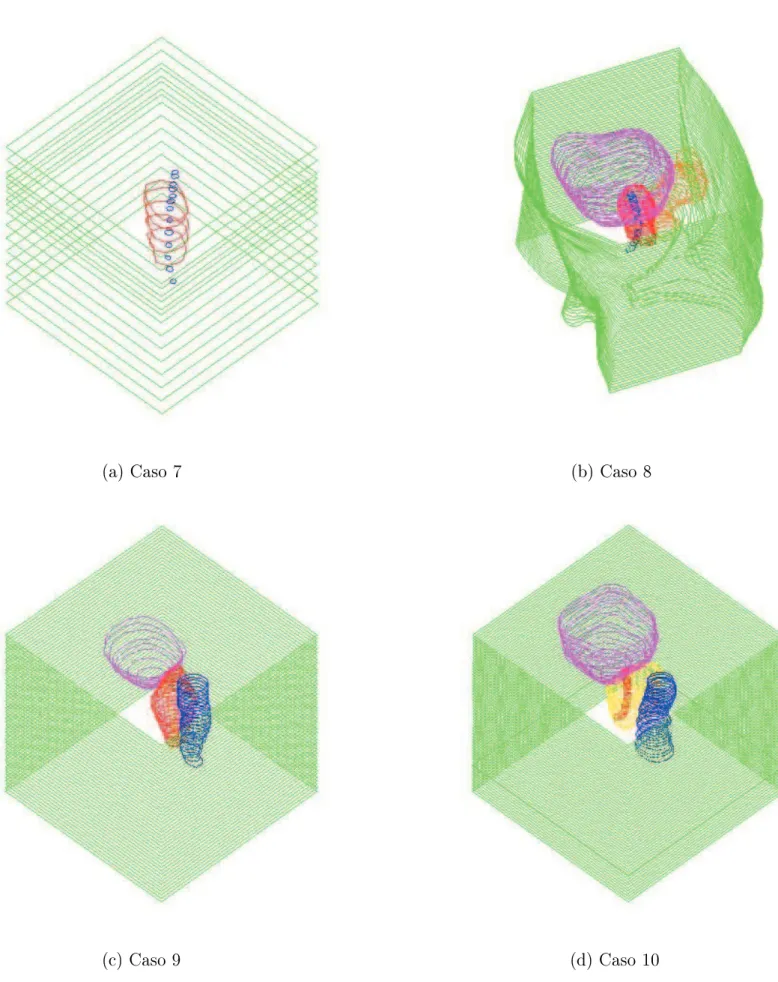
4.5 Imagens dos asos 7,8,9 e 10 . . . 46
4.6 Tempo -aso 1 . . . 47
4.7 Tempo -aso 2 . . . 47
4.8 Tempo -aso 3 . . . 48
4.9 Tempo -aso 4 . . . 48
4.10 Tempo -aso 5 . . . 48
4.11 Tempo -aso 6 . . . 49
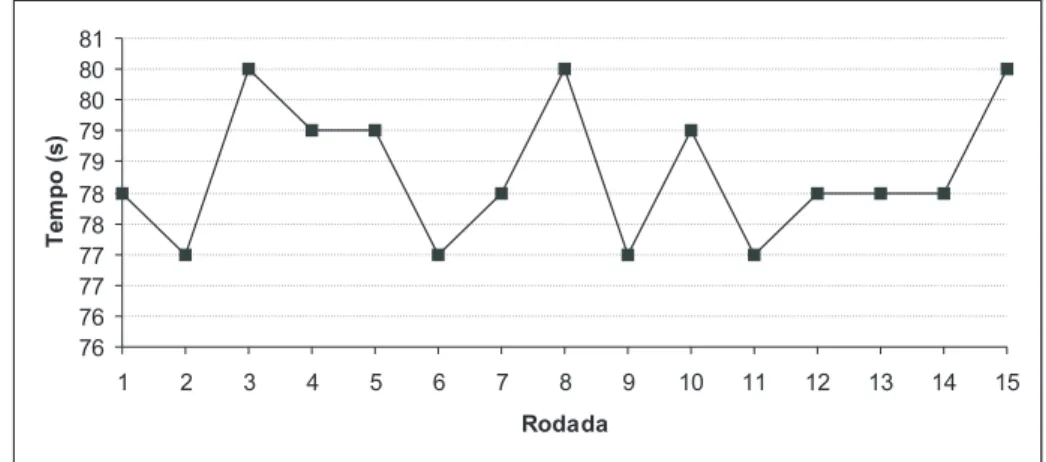
4.14 Tempo -aso 9 . . . 50
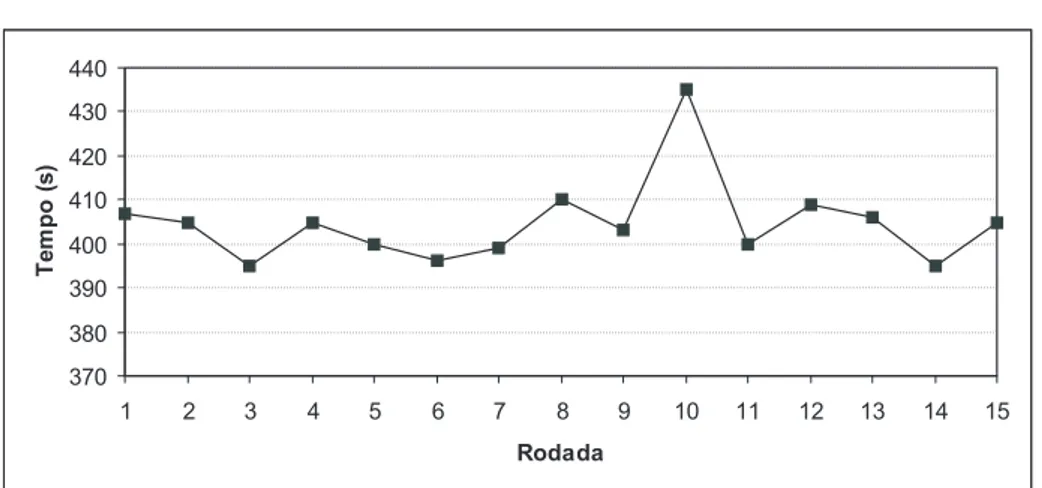
4.15 Tempo -aso 10. . . 50
4.16 Tempo em função das posições de parada . . . 51
4.17 Média de soluções inviáveis poriteração -aso 1 . . . 52
4.18 Média de soluções inviáveis poriteração -aso 2 . . . 52
4.19 Média de soluções inviáveis poriteração -aso 3 . . . 53
4.20 Média de soluções inviáveis poriteração -aso 4 . . . 53
4.21 Média de soluções inviáveis poriteração -aso 5 . . . 53
4.22 Média de soluções inviáveis poriteração -asos 6, 7,8, 9 e10 . . . 54
4.23 Média de soluções viáveis- aso 1 . . . 54
4.24 Média de soluções viáveis- aso 2 . . . 55
4.25 Média de soluções viáveis- aso 3 . . . 55
4.26 Média de soluções viáveis- aso 4 . . . 55
4.27 Média de soluções viáveis- aso 5 . . . 56
4.28 Média de soluções viáveis- asos 6, 7,8, 9e 10. . . 56
4.29 Média de soluções não dominadas por iteração- aso 1 . . . 57
4.30 Média de soluções não dominadas por iteração- aso 2 . . . 58
4.31 Média de soluções não dominadas por iteração- aso 3 . . . 58
4.32 Média de soluções não dominadas por iteração- aso 4 . . . 59
4.33 Média de soluções não dominadas por iteração- aso 5 . . . 59
4.34 Média de soluções não dominadas por iteração- aso 6 . . . 60
4.35 Média de soluções não dominadas por iteração- aso 7 . . . 60
4.36 Média de soluções não dominadas por iteração- aso 8 . . . 61
4.37 Média de soluções não dominadas por iteração- aso 9 . . . 61
4.40 Caso 2 - Tumor emedula. . . 63
4.41 Caso 2 - Tumor eorpo . . . 64
4.42 Caso 3 - Tumor eorpo . . . 64
4.43 Caso 4 - Tumor eérebro . . . 65
4.44 Caso 4 - Tumor eorpo . . . 65
4.45 Caso 5 - Tumor eorpo . . . 66
4.46 Caso 6 - Tumor euretra . . . 66
4.47 Caso 6 - Tumor eorpo . . . 67
4.48 Caso 7 - Tumor euretra . . . 67
4.49 Caso 7 - Tumor eorpo . . . 68
4.50 Caso 8 - Tumor ebexiga . . . 68
4.51 Caso 8 - Tumor ereto . . . 69
4.52 Caso 8 - Tumor eorpo . . . 69
4.53 Caso 9 - Tumor euretra . . . 70
4.54 Caso 9 - Tumor ebexiga . . . 70
4.55 Caso 9 - Tumor eorpo . . . 71
4.56 Caso 10 -Tumore reto . . . 71
4.57 Caso 10 -Tumore uretra. . . 72
4.58 Caso 10 -Tumore bexiga . . . 72
2.1 Exemplo de onguração de tempos de parada em um tratamento om
quatro atéteres de quatro posições parada . . . 10
4.1 Denição de valores de parâmetros . . . 37
4.2 Informaçõessobre os asos de testes. . . 42
4.3 Tabela-resumo om melhor, pior e médiade tempo para ada aso . . . 50
A.1 Caso 2 - Estratégia Golden . . . 79
A.2 Caso 2 - Estratégia BS . . . 79
A.3 Caso 2 - Estratégia S . . . 80
A.4 Caso 2 - Estratégia RS . . . 80
A.5 Caso 4 - Estratégia Golden . . . 81
A.6 Caso 4 - Estratégia BS . . . 81
A.7 Caso 4 - Estratégia S . . . 82
A.8 Caso 4 - Estratégia RS . . . 82
A.9 Caso 9 - Estratégia Golden . . . 83
A.10Caso 9 - Estratégia BS . . . 83
A.11Caso 9 - Estratégia S . . . 84
A.12Caso 9 - Estratégia RS . . . 84
A.13Caso 10 -Estratégia Golden . . . 85
BFGS- Broyden-Flether-Goldberg-Shanno
BI -Bano de Informações
DNA- Deoxyribonulei Aid
DFP -Davidon-Flether-Powell
DVH - DoseVolume Histogram
FR - Flether-Reeves
FSA - Fast Simulated Annealing
L-BFGS- Limited Broyden-Flether-Goldberg-Shanno
NSGA -Non-dominated SortingGeneti Algorithm
PGM -PartíulaGenétiaMóvel
PPL -Problema de Programação Linear
Introdução
1.1 Motivação
As estimativas do Instituto Naional de Câner para o ano de
2006
indiam oapareimentode
472
.
050
novos asos de ânerno Brasil [INCA,2005a℄. Estas tristesestatístiasadavez maisreforçamaexpetativadequeoânersejaaprinipalausa
demortespordoençanoséulo
21
. Muitos esforçostêmsido realizadosvisandomudareste quadro, tais omo ampanhas informativas, programas de prevenção e
investi-mentos em tenologias de tratamentos e mediamentos. Vê-se, portanto,mobilizações
em vários ontextos visando o ombate à doença. As neessidades de ações ontra o
âneraumentamaindamaisquando adoençaestáligadaaquestõesespeías,omo
osâneresausadospelousodotabao,exigindoontra-medidasqueextrapolam
qual-quer visão meramentelíniada situação. Observando o atual enário,onde há ações
dos diversos segmentos do governo, da soiedade e da iênia no sentido de melhorar
aqualidadede vidados paientes omâner, pode ser perebido queaspesquisas em
algoritmosheurístiostambémpodemdarsua ontribuiçãoparaestemesmom, tema
abordadoneste trabalho.
1.2 Justiativa
No tratamento de asos de âner por braquiterapia de altataxa de dose, uma fonte
radioativa é utilizada para irradiar a região-alvo. Esta, por sua vez, pode ser
irradi-ada a partir de várias loalizações, nas quais a fonte radioativa pode permaneer por
um erto intervalo de tempo, hamados de tempos de parada. São os valores desses
destes tempos de parada é realizadapor meio de tentativa e erro, abordagemem que
aequipe média envolvida dene, om base na sua experiênia, o onjunto de tempos
de parada e faz uma simulação da distribuição de dose obtida. Conforme o resultado
da simulação, a equipe faz ajustes nos tempos de parada e faz uma nova simulação.
Este proesso é repetido até que seenontre uma distribuição de dose que produza os
níveisreomendadosderadiaçãoparaotumoreparaasregiõesnormaisemvolta.
Ob-servando esteenário,veria-se agrandeneessidadede um algoritmoomputaional
que possa ser empregado para auxiliar a equipe média, forneendo ongurações de
tempos de parada que produzam distribuições de dose liniamente exeqüíveis. Tal
algoritmo também deve ter omo araterístia um baixo tempo de exeução e gerar
distribuições de dose mais eazes em omparação om osmétodos onvenionais.
1.3 Objetivos
O objetivo prinipal deste trabalho é desrever a implementação de um algoritmo
transgenétio para a denição de tempos de parada em tratamentos de âner por
braquiterapia de altataxa de dose. Com isso, pretende-se forneer um algoritmo que
possaauxiliaraequipemédiaforneendo-lhesonjuntosdetemposdeparada. Embora
estes onjuntos devam ter viabilidade de apliação prátia, isto é, devem resultar em
distribuições de dose apazes de destruir o tumor preservando os órgãos e teidos
normais,deveararitériodaequipemédiaaopçãodeutilizaçãoounãodosmesmos.
Umoutroobjetivodotrabalhoéodeiniiarosprimeirosestudosde otimizaçãoem
braquiterapiadealtataxadedoseomalgoritmostransgenétiosemétodosheurístios
emgeral. Aidéiaé queotrabalhopossa ofereerinformaçõeseexperiêniasrelevantes
àqueles quefuturamente venham a seinteressar pelo tema.
1.4 Organização do trabalho
Otrabalhoestá estruturado daseguinte forma: noapítulo2 éabordado oreferenial
teório,apresentandoadesrição doproblema queeste trabalhose propõe aresolvere
os oneitos relaionados; o apítulo 3 detalha os reursos utilizados na realização do
trabalho,bemomoosproedimentosadotados;adesriçãodoalgoritmoimplementado
e os resultados alançados são apresentados no apítulo 4; nalmente, no apítulo 5
Revisão de Literatura
2.1 Câner
Câner é a denominação dada às doenças que surgem omo resultado da divisão
irregular de élulas. O número de doenças resultantes ultrapassa uma entena e as
élulas defeituosas espalham-se rapidamente para outras partes de orpo. As élulas
doentes multipliam-se rapidamente provoando aúmulos, originando os hamados
tumoresanerígenos[INCA, 2001℄.
O proesso de formação do âner (arinogênese) está ligado a alterações que
oorrem no DNA das élulas, denominadas mutações. Como o DNA é o responsável
porprovideniarinformaçõesparaoordenação dasatividadeelulares, estaspassama
oorrer de forma desordenada, omprometendo o funionamento da
élula[INCA, 2001℄.
Como os proedimentos elulares são afetados pelo proesso de anerização, a
élulaanerosatorna-semenosfunionalqueumaélulanormal. Porausadointenso
ritmo de proliferação, as élulas doentes rapidamente substituem as élulas normais
e ausam a invalidez da região invadida. As élulas doentes podem migrar da região
atingidaparaoutrasregiõesnormaiseassimontinuaremespalhando-separaasdemais
regiões doorpo[INCA, 2001℄.
As alterações realizadas no DNA das élulas, responsáveis pelo iníio do proesso
de anerização, estão assoiadas à ação de agentes anerígenos ou arinógenos. A
açãodesses agentes deixa aélulaem um estadotalque, quando estaéexposta àação
onjunta de outros agentes, hamados onopromotores, desenadeia funionamento e
divisão irregulares [INCA, 2001℄. O proesso de arinogênese está ilustradona gura
Figura 2.1: Proesso de arinogênese, retirado de [INCA, 2001℄
2.2 Radioterapia
Dentre as ténias existentes para o tratamento do âner está a radioterapia. Esta
téniautilizafontesradioativasparadestruirasélulastumorais,tendoduasvariantes,
onformea loalizaçãodas fontes [INCA, 2005b℄:
•
Teleterapia: utilizaas fontes radioativasexternas aoorpodo paiente;•
Braquiterapia: as fontes radioativas são oloadas no interior do orpo dopa-iente.
A radiação é apaz de provoar a morte de élulas animais expostas à sua ação
através de alterações provoadas em seu interior. Os efeitos da radiação são mais
expressivos em élulas que apresentam maior atividade metabólia, omo é o aso
das élulas anerosas em intenso proesso de divisão. Assim, as élulas tumorais
têm maior sensibilidade à radiação e portanto podem ser mais failmente
destruí-das [Einstein,2000℄.
Independentemente de qual das duas modalidades anteriores seja esolhida para
trataroâner, éneessárioelaborarumplanejamentoradioterápioantesde
empregá-la. Este planejamento é elaborado pela equipe média responsável pelo aso. Nesta
etapa, são determinadas diversas variáveis de aráter línio, que são dependentes do
aso. Dentre as variáveisomuns à maioriados asos estão[Elbern, 2002a℄:
•
Patologia: tipo doâner eo volumea ser irradiado;•
Tratamento: abordagem de tratamento que será empregada. Exemplo:radioterapia e quimioterapia;
•
Campode irradiação: área dasuperfíiedoorpo dopaiente a ser irradiada;•
Radioterapia: dose radioativa a ser apliada e, se for o aso, om o número defraionamentos om suas respetivas datas de apliação.
Apósa denição dessasvariáveis, o paienteé levado aum aparelhode raio-X, onde o
mesmo é radiografado naposição em que será irradiado. Ao término, são feitas
mar-ações (tatuagens,por exemplo)que assinalamoloalque reeberá a radiação. Como
pode ser perebido, esta fase é referente aotratamentoradioterápio,não importando
seeste será exeutado por meio braquiterapiaou teleterapia.
2.3 Tratamento radioterápio om braquiterapia
O termo braquiterapia é de origem grega (brahys = junto, urto, próximo; terapia
= tratamento) e se refere ao proesso no qual as fontes radioativas são introduzidas
no volume a ser tratado ou oloadas bem próximas a ele. As fontes são arranjadas
de forma a irradiar o máximo possível daregião-alvo e, simultaneamente, preservar o
máximopossívelda regiãosaudávelirunvizinha [Einstein,2000℄.
Asfontesradioativaspodemserimplantadasdiretamentenoorpodopaiente
(im-plante permanente) ou através de apliadores (implantetemporário),também
hama-dos de atéteres ou sondas [IRadioterapia,2004℄. Neste último, os implantes são
re-movidosaotérmino doproesso.
Conformea taxade dose, hádois tiposde braquiterapia [IRadioterapia, 2004℄:
•
Baixa taxa: o paiente étratado om fontes de baixataxa de radiação, as quaispodem permaneer noorpo dopaiente durante horas oudias;
•
Altataxa: éutilizadoumelementodealtaatividaderadioativa,deformaaliberaruma alta dose de radiaçãoporum urto intervalode tempo.
Abraquiterapiatambémpodeserlassiadaonformeoloaldeapliação[Einstein,2000℄:
•
Intraavitária(dentro daavidade): o materialradioativo éoloado no interior•
Endoluminal (dentro da luz): a radiaçãoé introduzida dentro de órgãos defor-mato tubular. Ex.: tratamento de tumoresde esfago epulmão;
•
Interstiial (em meio ao teido): a radiação é oloada na região afetada,nor-malmentevia proedimentoirúrgio. Ex.: tratamentode tumores de próstata;
•
Moldes de superfíie: a radiaçãoé apliada nasuperfíie externa doórgão. Ex.:tratamento de tumor oftálmio.
Um outro ritério de lassiação existente é a forma de arregamento ( loading)
dos atéteres om asfontes radioativas, oqual lassia abraquiterapia em três tipos
[IRadioterapia,2004℄:
•
Manualpura: as fontes são oloadas manualmentedentro dos atéteres e estessão introduzidosno orpo dopaiente;
•
Afterloading (pós-arga): os atéteres são oloados no orpo do paiente semlevarem fontes radioativas onsigo. Após a inserção dos atéteres, as fontes são
inseridas dentro dos atéteres, de formamanual;
•
Remote afterloading (pós-argaremota): difere daanteriorapenasnainserçãodomaterial radioativo, que é feita de formaautomátiaom o emprego de
equipa-mento espeío.
Em todos esses tipos de braquiterapia, os atéteres são inseridos manualmente.
O tereiro tipo é o mais reente e utilizado na atualidade. Este tipo de
braqui-terapia neessita de apenas uma fonte radioativa para realizar o tratamento. A
ra-diação é omumente obtida a partir de isótopos radioativos omo o Césio-
136
e oIrídio-
192
[Elbern, 2002b℄. Uma máquina, hamada de unidade de pós-arga remota,fazainserçãodomaterialradioativoem adaatéter, umporvez. Agura 2.2 ilustra
Figura2.2: Unidade de pós-arga remota
O atéteré basiamente um tubo seionado que permite a passagem de um abo
metálio em seu interior. Em uma das extremidades do abo está alojada a fonte
radioativa a ser utilizada no tratamento. É esta extremidade que será introduzida
no orpo do paiente, por meio do atéter. A outra ponta do abo é utilizada pela
unidade de pós-arga remota,de formaa movimentá-lodentro do atéter. As seções
nointeriordoatéterpermitemqueafonteradioativaqueestaionadaamdeirradiar
umadeterminadaárea. Otempoqueafontearáestaionadaemdeterminadaseção
éongurado pelo operador daunidade de pós-arga remota,de formaa satisfazer os
níveisdesejados de dose.
A seções dos atéteres também são hamadas de posiçõesde parada, exatamente
por orresponderem aos loais em que a fonte radioativa pode ar estaionada. A
Figura 2.3: Umtipo de atéter
Há tipos diferentes de atéteres onforme o tipo de âner. Em todos os asos, os
atéteressão implantadosmanualmentenaregiãoaser irradiadaedepoissão
oneta-dosàunidadedepós-argaremota. Agura2.4demonstraumexemplodeimplantação
de atéteres para o tratamento do âner de mama, enquanto a gura 2.5 apresenta
três atéteres onetados à unidade de pós-arga remota.
Figura2.5: Conexão de três atéteres àunidade de pós-arga remota
A equipe média dene, onforme o aso, o número de atéteres a ser empregado
e sua disposição na região-alvo. Com base nessas informações, são determinados os
tempos de parada da fonte radioativa em ada seção de ada atéter, os quais são
onguradosnaunidade de pós-argaremota. Estandoongurada,aunidade de
pós-arga remota introduz a fonte radioativa em ada atéter, obedeendo os tempos de
paradapreviamente denidos.
Para ilustrar o funionamento da unidade de pós-arga remota, onsideremos um
tratamentohipotétioaser feitoom ouso de quatro atéteres. Comopode ser
pere-bido, ada atéter possui quatro posiçõesde parada, ada uma assoiada a um
deter-minadotempo(em segundos), omo exempliado natabela2.1:
Catéter Tempos de parada em ada posição (segundos)
Posição 1 Posição 2 Posição 3 Posição 4
1
1
.
0
0
.
0
2
.
0
0
.
0
2
3
.
0
2
.
0
1
.
0
2
.
0
3
2
.
5
1
.
0
1
.
5
1
.
5
4
1
.
0
0
.
0
3
.
0
2
.
0
Tabela 2.1: Exemplo de onguração de tempos de parada em um tratamento om
quatro atéteres de quatro posições parada
A unidade de pós-arga remotafará aintrodução dafonte radioativanos atéteres
omo programado. Supondo que a ordem de inserção da fonte nos atéteres seja a
mesma da tabela 2.1, então a unidade de pós-arga remota fará a inserção
primeira-mentenoatéter1,ondeafontepermaneeráestaionadapor
1
.
0
segundo naprimeiraposição de parada e depoisserá movidarapidamente para a tereira, onde permanee
próximo,queéoatéter2. Nesteatéter, oproessoénovamenterepetido: afontea
estaionadapor
3
.
0
segundosnaprimeiraposiçãode parada,2
.
0
segundosnasegunda,1
.
0
natereira e2
.
0
na quarta. Istoé feitoaté quea fonte perorratodos osatéteresonstantes naonguração.
2.4 O que pode ser otimizado
Observando os proedimentos realizados notratamento do âner om braquiterapia,
pode-sedizerqueépossívelautomatizaroproessoutilizandométodos omputaionais
de otimização de duas formas:
•
Pré-planejamento: otimização naelaboraçãodo planejamentoradioterápio;•
Pós-planejamento: dadoumplanejamentoradioterápio,ométodode otimizaçãoé empregado durante aexeução doplanejamento.
No ontexto da braquiterapia remote afterloading de alta taxa de dose, objeto de
estudo deste trabalho, o uso de métodos de otimização durante o pré-planejamento
está relaionado à determinação da quantidade e posiionamento dos atéteres. Isto
deve ser determinado de maneira a propiiar a melhor forma para apliação da dose
radioativa, que, por sua vez, deve resultar no melhor modo de ombater as élulas
anerígenase poupar aregião saudável em volta[Lahanaset al.,2004℄.
Emtempodepós-planejamento,paraojáreferidotipodebraquiterapia,oobjetivo
é, para um determinado planejamento radioterápio ontendo as reomendações de
quantidade e posiionamento dos atéteres, enontrar os tempos de parada da fonte
radioativaemadaseçãode adaatéter. Nesteasoodesaoédeterminarostempos
deparadaqueresultemnamelhordistribuiçãodedosepossível,novamentepreservando
aregião sadia edestruindo as élulas tumorais [Lahanaset al.,2004℄.
Uma outra possibilidade seria reunir as duas formas em uma só: dado um aso,
o método de otimização enontraria o número ótimo de atéteres, om seus
respe-tivos posiionamentos ótimos e tempos de parada também ótimos. Essa perspetiva
englobariaboaparte das neessidades de otimizaçãoem braquiterapiade altataxade
dose, ontudo reuniria também as diuldades de solução de dois problemas em um,
resultandoem um problema de solução ainda mais difíil.
Pelo fato de estarmos se tratar de vidas, a responsabilidade de um método de
otimização em gerar boas soluções é bastante elevada. É bem verdade que um
2.5 Diuldades de solução
Nosdoisasos ilustradosnaseção anterior,hádiuldadesomputaionaisde solução.
Seosdois problemasforemassoiados emapenas um,tem-seuma omplexidadeainda
mais elevada. Ainda não há estudos sistemátios abordando o grau de omplexidade
dessesproblemas. Poroutro lado, não háregistrosde pesquisas quetentaram
resolvê-los de forma exata. Pelo fato deste trabalho estar foado na segunda situação, ou
seja, determinar os melhores tempos de parada da fonte radioativa para uma dada
onguração de quantidade e posiionamento dos atéteres, os próximos assuntos a
seremabordados são relaionados atal problema.
Aomplexidadedesseproblemaestánograndenúmerodeombinaçõesquesepode
obter em virtude do número de atéteres e seu número de posições de parada. Além
disso,háum grandenúmerodepontos (oordenadas
(
x, y, z
)
)querepresentamoorpodo paiente. Este número torna-se neessário para assegurar bons níveis de preisão,
no entanto, sua proporção eleva drastiamente o tempo requerido para avaliar uma
onguraçãodos tempos de parada. Cada pontosofre o efeito de radiação provoado
poradatempodeparadadafonteradioativaemadaatéter,demaneiraqueépreiso
integrarosefeitos de todos ostemposde paradaem todos ospontos para quesepossa
avaliaruma onguração.
2.6 Números do problema
Conformealoalizaçãodotumor,háaneessidade doemprego deatéreres espeíos
e em erta quantidade. Em implantes de próstata, por exemplo, podem ser
utiliza-dos era de
20
atéteres [Lahanaset al.,2004℄. Alguns atéteres podem ter até300
diferentes posições de parada [Milikoviet al.,2002℄ e o orpo do paiente pode ser
representado poraté
120
.
000
pontos [Lahanaset al.,1999℄.Para efeitode ilustraçãodo usto omputaionalrequerido naavaliaçãode
ong-urações, onsideremos a seguintesituação:
Número de atéteres:
10
Número de posiçõesde parada:
200
Número de pontos:
80
.
000
Noenárioaima,paraquesejapossívelfazeraavaliaçãodeumadadaonguração
de tempos de parada, será neessário, para ada posição de parada, alular o efeito
atéter,há
80
.
000
pontos sob suainuênia. Assim,ousto omputaionalporatéteré da ordem de
200
×
80
.
000 = 16
.
000
.
000
operações. Como há10
atéteres, o usto totalé da ordemde16
.
000
.
000
×
10 = 160
.
000
.
000
operaçõesporavaliação.2.7 Estado da arte
Tratando-sedebraquiterapia,otermoestadodaarte aindaestádistantedarealidade
emque seenontram osestudosreentes. Embora passívelde otimizaçãopormétodos
omputaionais,a braquiterapia ainda éalgo de fortedependên ia humana.
Quando um métodode otimização é empregado na busa dos melhores tempos de
parada da fonte radioativa, ele está, na verdade, objetivando enontrar alguma
via-bilidade para um planejamento elaborado por uma equipe média. Ou seja, não há
garantias, por exemplo, se existem soluções viáveis para um determinado
posiiona-mento de atéteres. Também não há uma função matemátiaque possa determinar a
probabilidadedeuradopaiente. Portanto,háaindamuitasdeisõesquesãotomadas
om base naexperiênia prossional daequipe médiaresponsável pelo aso.
Há ainda diversos outros fatores que podem ter grande inuênia nos resultados
reaisdeumtratamentoporbraquiterapia. Umexemplodissosãoasprópriasestruturas
anatmias do paiente, as quais podem sofrer mudanças em sua forma durante o
tratamento. É possível ainda que os atéteres mudem sutilmente de posição, o que
pode alterar o resultado dotratamento.
Embora os fatoresanteriormentemenionados tenhampoder de inuêniar nos
re-sultados,osmesmosnãosão onsideradosquandodautilizaçãodemétodosde
otimiza-ção. Porém, não se pode dizer que isto seja algum tipo de negligênia, pois, sem
onsiderar tais fatores, o problema por si só já é de grande omplexidade. Com a
in-lusãodos fatores anteriores,ertamentea omplexidadeseria ainda maior e,de erta
forma, fugiria doesopo ombinatórioda questão.
Tendo-se em vista essas onsiderações, o suesso do tratamento não estará,
por-tanto,apenassobresponsabilidadedométodode otimização. Equandonãoseonhee
asoluçãoótima, omoé oaso deste problema,não hágarantiasde qualidadede uma
determinadaonguração. Oquesesabeéoquantoelapossuiviabilidadede exeução
2.8 Abordagens de solução
Ohistóriodepesquisasemmétodosdeotimizaçãorelevantesnoramodebraquiterapia
é relativamente reente. As abordagens atualmente utilizadas empregam intervenção
média na geração de soluções. Tais sistemas normalmente não dão o suporte de
soluçõespropriamentedito. Aoinvésdisso, ofereemreursos gráosdeinterfaepara
asimulaçãodetratamentosombaseemumadeterminadaonguraçãodesolução,que
émelhoradamanualmenteportentativaeerro. Combasenosresultados dasimulação,
a equipe média faz ajustes inrementais até que se obtenha a melhor onguração.
Umdos representantes desse tipode sistemasé oPlato NuletronTreatment Planning
System [Nuletron, 2005℄.
Uma outra abordagemsão os sistemas de planejamentoom o suporte de geração
desoluções. Sãosistemassemelhantesaosanteriores,omafunionalidadeadiionalde
sugerirem ongurações. Noentanto, taissistemas podem retornar onguraçõesom
tempos de parada negativos, resultando em soluções inviáveis. Diante desses tempos
negativos, o proedimento normalmente adotado é sua renormalização para zero. Se
porumladoarenormalizaçãopoderesultaremsoluçõesviáveis,asmesmasapresentam
distribuições de dose om qualidade potenialmente inferior [Lahanaset al.,2003a℄.
Há também abordagens de solução om o emprego de métodos heurístios, ujos
prinipais representantes são:
•
Simulated Annealing [Lessarde Pouliot,2001℄, [Sloboda, 1992℄ 1•
Algoritmogenétio [Lahanas etal.,1999℄, [Milikovi etal.,2001℄•
Algoritmogenétio híbrido [Lahanaset al.,2003b℄Na abordagem por Simulated Annealing, as soluções são obtidas por tentativa e
erro, o que nem sempre resulta na obtenção de boas soluções. O diferenial desta
abordageméouso doalgoritmoFSAFast SimulatedAnnealing [Szu e Hartley, 1987℄
que propiiaum bom tempo de proessamento, sendo este inferior a um minuto para
oproblema em questão.
As tentativas de solução por algoritmos genétios tradiionais não resultaram em
bons resultados. Há problemas om temposnegativos (soluções inviáveis) e a
estraté-gia de renormalização desses tempos para zero não resulta em soluções de boa
qual-idade [Milikovi etal., 2001℄. Houve ainda tentativas om algoritmos genétios em
1
O trabalho desreve umalgoritmoSimulated Annealing apliado àbraquiterapia de baixa taxa
que houveram problemas de desempenho [Lahanas etal.,1999℄. Nessas tentativas de
soluçãoporalgoritmosgenétios, pde serperebidaarealapaidadede onvergênia
dessesalgoritmos. No entanto,para oproblema em estudo,talapaidade vem
aom-panhada daneessidade de um grandenúmerode iteraçõese indivíduosàmedida que
se aumenta o nível de rigor sobre as soluções. Esta neessidade também existe om
algoritmosdeSimulatedAnnealing. Oempregodemétodosdeterminístiospossibilitou
a melhoria do desempenho dos algoritmos genétios, sendo estes agora hamados de
algoritmosgenétios híbridos [Lahanas etal.,2003b℄.
Embora haja problemasoneituaisde omparação,omo expliadonoiníiodeste
apítulo,pode-se dizer que o algoritmo genétio híbrido éo melhortrabalho já
desen-volvidoparaadeterminaçãodos temposde paradaem braquiterapia. Este algoritmoé
um dos motoresde otimizaçãoutilizadosno sistemaSwift
T M
[Pi-Medial,2005b℄,
uti-lizadoparatratamentodeânerdepróstataombraquiterapiadealtataxadedose. O
sistemafoidesenvolvidopelasempresasdoramomédioPi-Medial[Pi-Medial,2005a℄
eMedCom[MedCom, 2005℄eédistribuídopelaompanhiaNuletron[Nuletron, 2005℄.
2.9 Transgenétia Computaional
A Transgenétia Computaional é uma ténia de solução de problemas baseada nos
paradigmas genétio e memétio de evolução [Gouvêa, 2001℄. Por tratar-se de uma
abordagem biológia, soluções em potenial para um determinado problema a ser
otimizado são odiadas simulando adeias genétias, resultando em uma população
de romossomos. Ao longo do tempo a população sofreevolução, o que representaria,
em termos algorítmios, a melhoriada qualidade das soluções iniiais (população
ini-ial) para aresolução do problema.
O proesso genétio de evolução segue os prinípios da Teoria da Evolução
Natu-ral de Charles Darwin e prevê operações omo seleção, mutação e ruzamento entre
os indivíduos de uma população. Assim, as informações genétias são sempre
prove-nientes daprópriapopulação. O paradigmamemétio prevêaevoluçãodos indivíduos
om base em suas interações soiais, isto é, informações exógenas à sua onstituição
genétia [Goldbarg e Goldbarg, 2002℄.
As informações memétias são planejadamente inltradas no odigo genétio da
população visando sua melhoria. Essas informações am armazenadas em um
repositório hamado Banode Informações (BI) e representam idéias de omo guiar o
proesso evoluionário. Emtermos omputaionais,o BIpode ser formado, por
onheimentoultural dosindivíduosarespeitodoproblemaequepoderiaserútilna
busaporsoluçõesmelhores. Asinformaçõesmemétiassãoutilizadasnaonstruçãode
agentes transgenétios, que podem ser lassiados omo Vírus ouPartíulaGenétia
Móvel e são responsáveis por realizar a inltração dessas informações na população.
Assim,ambosarregamsegmentosgenétiosombasenasinformaçõesmemétias,mas
diferemquanto à formade atuação juntoà população.
A araterístia mais marante do Vírus é sua apaidade de realizar alterações
noódigo genétio de um indivíduomantendo as modiaçõesintatas porum
deter-minado intervalo de tempo, alterando, onseqüentemente, a adequação do indivíduo
infetado[Goldbarg etal., 1999℄. A PartíulaGenétia Móvel (PGM) não apresenta o
mesmo omportamento que o Vírus quanto à durabilidade da modiação realizada,
sendoesta mantidaapenassehouvermelhoriadaaptidãodoindivíduo[Gouvêa, 2001℄.
Esta denição de manter ou não a manipulação do agente transgenétio é onheida
omo proesso imunológio. As melhorias introduzidas na população por meio das
manipulações realizadas pelos agentes transgenétios podem ser inorporadas ao BI,
realimentando-o. A gura2.6apresentaopseudo-ódigode umtípioalgoritmo
trans-genétio, também hamado de ProtoG.
1
Carregar um Banco de Informações (BI)
2
Gerar e avaliar uma população inicial de cromossomos
3
Repita
4
Gerar agentes através de competição de informações do BI
5
Para
todo cromossomo da população
Faça
6
Se
o cromossomo é sensível à manipulação
Então
7
Realizar manipulação
8
Reavaliar o cromossomo manipulado
9
Se
(cromossomo é sensível a minipulação)
Então
10
Incluir as informações, associadas ao cromossomo, no BI
11
Fim_Se
12
Fim_Se
13
Fim_Para
14
Até
Critério de parada
Figura2.6: Pseudo-ódigo doalgoritmotransgenétio ProtoG
Conformesugeremaslinhas1e2dopseudo-ódigo, iniialmenteéneessárioobter
umBIeumapopulaçãoiniialdevidamenteavaliada. Aiteraçãodoalgoritmoiniia-se
na linha 4, em que são gerados os agentes transgenétios. Essa linha faz referênia à
ompetição de informações do BI, isto é, as informações utilizadas para a formação
dos agentes podem ompetir entre si, de modo que a melhor seja esolhida segundo
veriadosquantoàsuaimunidadeàmanipulaçãode agentes. Casooromossomoseja
sensível, a manipulação é realizada. Nas linhas de 8 a 10 o romossomo é averiguado
om o objetivo de veriar se o mesmo satisfaz os ritérios de realimentação do BI.
Casooromossomo atendataisritérios,asinformaçõesreferentes aoromossomosão
aresentadas ao BI.
No ontexto algorítmio, a Transgenétia Computaional é denida omo uma
metaheurístia, pois, a partir de suas denições, é possível derivar diversos
algoritmosheurístios. Issotambémpodeserobservadonopseudo-ódigodagura2.6,
pois ospassos denidos em ada linha sugerem a exeução de operações genérias, as
quais são de aráter transgenétio mas ofereem plena liberdade de implementação.
Deste modo, operaçõestaisomo a geraçãodapopulação iniial,geração de agentes e
arealização demanipulação,porexemplo,podem serimplementadasde váriasformas,
onformea neessidade.
2.10 Otimização Multiobjetivo
Os problemas de otimização multiobjetivo onsistem em enontrar o onjunto de
va-riáveis de deisão que otimizaum onjunto de funções objetivo potenialmente
oni-tantes, satisfazendorestrições[?℄. Deste modo,têm-seumonjuntodefunçõesobjetivo
eom essa formulaçãoé possívelmodelar problemas domundoreal de formamais
ad-equada, pois todos os ritérios envolvidos na otimização podem ser onsiderados em
funções objetivo e não apenas em restrições.
Em problemas lássios de otimização normalmente há apenas uma função
obje-tivo, de maneira que qualquer outro ritério que se queira inluir na modelagem do
problema deve ser inluídoomo restrição. Um exemplode problema quetipiamente
onsideraapenas umafunção objetivoseria dotipoenontraramenordistâniaentre
duas idades. Supondo a existênia de um ritério adiional omo a qualidade das
rodovias 2
e onsiderando a otimização de apenas uma função objetivo, esse ritério
deve ser aresentado omo restrição. Assim, o objetivodo problema agoraseria mais
espeío, dotipoenontrar amenordistâniaentre duasidadesem um trajetoom
pelo menos 80% de piso pavimentado. Na abordagem multiobjetivo isso
represen-taria aadição de uma função objetivo, resultando noseguinteproblema: enontrar a
menordistâniaentre duasidadespelotrajetoomamaiorporentagemdepiso
pavi-mentado. Deste modo, a modelagemlevaem ontaa otimizaçãosimultâneadas duas
funções, onsiderandosoluçõesempotenialquepodemforneertrajetosrelativamente
urtosom porentagem de pavimentação superior a80%.
2
2.10.1 Solução ideal
Devidoàexistêniadenomínimoduasfunçõesaseremotimizadas,umasoluçãoótima
devesatisfazeraotimalidadede adafunçãoobjetivoindividualmente. Paraoexemplo
anterior,asoluçãoótima forneeriaotrajetooma menordistâniaeamaior
poren-tagemde piso pavimentado. Porter de satisfazerasotimalidades das funções objetivo
simultaneamente, asoluçãoótima,também onheidaomo soluçãoideal,diilmente
existe. Novamente onsiderando a situação anterior, se o trajeto mais pavimentado
possível possui 90% de pavimento e o trajeto mais urto possível possui 50 km de
distânia,porexemplo,asoluçãoótimadeveriaresultarexatamentenessesdois ustos.
No entanto, é possível que o trajeto mais pavimentado não seja também o trajeto
mais urto e vie-versa, não existindo, portanto, solução que satisfaça a otimalidade
de ambos ritériossimultaneamente.
2.10.2 Pareto-dominânia
A otimização de várias funções objetivo de forma simultânea requer um tratamento
diferente na interpretação do que seriam soluções boas ou ruins para um
determi-nado problema. Como há mais de um ritério de omparação, esta deve onsiderar
todos eles para que se possa emitir um pareer. Para tanto, é utilizado o oneito de
pareto-dominânia, o qual onsidera as omparações entre os respetivos ritérios de
duas soluções am de determinar seuma solução édominante sobre aoutra [? ℄.
Uma solução A domina uma solução B quando a primeira possui pelo menos um
ritériomelhorqueoorrespondente nasegunda eonsegue aomenosseequipararnos
demais. Assim, se o problema possuir, por exemplo, três ritérios, uma solução
do-minaráoutra seonseguir aomenos empatar em dois ritériosrespetivose vener
em um deles. Nesse aso a segunda solução é hamada de solução dominada perante
a primeira. Quando uma solução A não domina uma solução B, isto é, a solução A
vene asoluçãoBem algunsritérioseperde em outros,eoinversotambémoorre,
ambassoluçõessãohamadasde nãodominadas,poisemborauma nãoonsigaexerer
dominâniasobreaoutra,reiproamenteambasnãosofremdominâniaumadaoutra.
2.10.3 Pareto-otimalidade
O oneito de pareto-dominânia é restrito à omparação de pares de soluções, pois
semprequandosearmaqueumasoluçãodominaouédominadaporoutra,éneessário
esseoneito pode ser ampliadoquandoasomparaçõesonsideramtodas aspossíveis
soluções de um problema multiobjetivo.
Seguindoestaidéia,éhamadade pareto-ótimaasoluçãoquenãosofredominânia
de nenhuma outra pertenente ao universo de soluções do problema. Pelo fato de ser
omum ainexistênia de soluçãoideial paraum problema multiobjetivo,normalmente
os métodos de otimização busam por pareto-ótimos. Contudo, é inviável determinar
todo o onjunto de pareto-ótimos, uma vez que o tamanho desse onjunto rese
ex-ponenialmente [? ℄. Emrazão dessa diuldade,é omum que métodos heurístios de
otimizaçãovisem enontrar apenas uma parte representativadesse onjunto.
2.11 O que há de melhor
O algoritmo genétio híbrido [Lahanaset al.,2003b℄ é uma versão adaptada do
algo-ritmo genétio NSGA-II [Deb etal., 2000℄. As adaptações introduzidas no algoritmo
genétio híbridoforam bastantesigniativas,dentre as quaisestão:
•
Geração de pontos uniformementedistribuídos;•
Uso de métodos determinístios.A primeira modiação teve grande ontribuição nos resultados alançados. A
téniaéutilizadanaobtençãodasoordenadasgeométriasquerepresentamosobjetos
de estudo que ompõem o aso apliado do problema, ou seja, na disretização do
problema.
Asoordenadasgeométriasquerepresentam oorpodopaientesão normalmente
obtidaspor tomograa ou ressonânia magnétia. Depois daapliação de uma dessas
ténias, têm-se omo resultado apenas as oordenadas bidimensionais dos ontornos
Figura2.7: Contornos geradosa partir de um aso de ânerde érebro
Para que se onsiga alular adequadamente a dose resultante em virtude de uma
onguraçãodetemposdeparada,éneessárioquesetenhaoonjuntodeoordenadas
orrespondente aos pontos internos dos ontornos. Pelofato destes pontos não serem
forneidosportomograa ou ressonânia magnétia, a únia alternativa que resta é a
sua geração, que éfeita omputaionalmente.
A geração de pontos é feita dentro dos ontornos de maneira uniforme, além de
serem realizadas veriações de viabilidade de existênia de
pontos [Lahanas etal.,2000℄. Neste aspeto, pontos muito próximos aos atéteres
são desprezados , sendo aeitos, portanto, somente aqueles que estejam a uma erta
distâniados atéteres. Com esta ténia de geraçãode pontos, boas distribuiçõesde
dose podem ser melhor obtidas, pois a onguração de loalização dos pontos não é
favorávelà existêniade grandes diferenças de níveisde radiação entre os mesmos.
A segunda modiação é aresponsável pornomear oalgoritmodesenvolvido omo
genétio híbrido. Normalmente, os algoritmos genétios são iniializados om
populações aleatórias e onforme a apaidade do algoritmo gerar bons indivíduos,
o algoritmo pode requerer um erto número de gerações para onvergir. Com base
nisso, no algoritmo genétio híbrido, a população é iniializada om soluções obtidas
om diversas rodadas de um método determinístio de otimização irrestrita baseado
Até que se hegasse a este ponto, foram feitos estudos de viabilidade no uso de
tais métodos determinístios, omo mostrado em [Milikoviet al.,2002℄. Como os
resultados obtidos foram bons, realizou-se um estudo omparativo entre métodos
de-terminístios e um algoritmo FSA Fast Simulated Annealing, omo mostrado em
[Lahanasetal., 2003a℄. Dentre outros fatores, o L-BFGS foi o melhor por apresentar
melhordesempenho em relação aos demais algoritmos.
O algoritmo genétio híbrido foi implementado om dois tipos de função objetivo:
umabaseada em DVH (histogramade dose-volume)eoutra baseada em variânia. Os
melhoresresultadosforamobtidosomfunçõesbaseadasemvariânia,exatamentepelo
fatodapopulação utilizadanaimplementaçãoser iniializada omassoluçõesgeradas
pelo L-BFGS. O algoritmo om funções objetivo baseadas em DVH não pode ter sua
população iniializadapeloL-BFGSpelofatodestas funçõesnão possuíremderivadas,
algo requeridopelo L-BFGS.
O L-BFGS é um método determinístio de otimização irrestrita. Para utilizá-lo,
deveserimplementadaafunção objetivoquesedeseja otimizarbemomooálulode
sua derivada. Passando estes parâmetros ao algoritmo, ele retornará o valor mínimo
dafunção e ovalorde entrada que produz talresultado. Exemplo:
função:
f
(
x
) =
x
−
1
derivada:
dx
=
−
x
−
2
resultado:
x
= 256
,
9
ef
(
x
) = 0
,
003
Pelo fato do L-BFGS possibilitar a otimização de apenas uma função objetivo
por vez, foi preiso utilizar o método das somas ponderadas para reduzir as
múlti-plas funções objetivo em apenas uma. Para tanto, foram utilizados vetores de pesos
aleatórios
w
= (
w
1
, w
2
, . . . , w
M
)
, de forma queM
X
i
=1
w
i
= 1
. Cada vetor de pesorepre-senta uma ponderação que é otimizada pelo L-BFGS. Assim, ada vetor orresponde
a uma rodada do L-BFGS, ujo valor
x
retornado é elevado ao quadradopara deniros tempos de parada de uma solução:
t
=
x
2
. Isto é feito de forma a prevenir a
iniializaçãodapopulação om tempos negativos(soluções inviáveis).
Comooproblemaémultiobjetivo,sãoutilizadososoneitos depareto-dominânia
no algoritmo genétio híbrido. A ada geração, as soluções não dominadas são
adi-ionadasa uma população externa, a qualé formada apenas por indivíduosnão
dom-inados. Na adição de uma solução à população externa novamente são veriadas as
ondições de dominânia, sendo que a solução somente será adiionada aso seja não
dominada em relação às soluções pré-existentes. Caso existam soluções dominadas
desartadas. Uma outra araterístia do algoritmo é a substituição de indivíduos
dominados por indivíduos dominantes quando a população do algoritmo hega a um
ertolimiteongurável.
Os melhores resultados obtidos pelo algoritmo genétio híbrido foram alançados
empregando-se o L-BFGS para a geração da população iniial. Visando obter os
melhores resultados, deidiu-se por empregar o L-BFGS para iniialização da
popu-laçãoiniialdoalgoritmotransgenétiodesritonesse trabalho,onformeestá desrito
Material e Métodos
3.1 Loal e período
Osprimeirosestudosreferentes àotimizaçãonotratamentodoânerforamrealizados
ainda durante as disiplinas do programa de mestrado, em
2003
. Na oasião foramestudadostemaspertinentesaoassunto,osquaispermitiramummelhorentendimento
do problema para a formulação da proposta de pesquisa. Ainda nessa époa foram
feitasalgumasimplementações eoaprendizado adquiridofoi muito importantepara a
realização deste trabalho. As demais tarefas relativas aotrabalhoforam realizadas ao
longo dos anos de
2004
e2005
utilizando reursos próprios e laboratórios do CentroUniversitárioLuterano de Palmas -CEULP/ULBRA.
3.2 Fontes de pesquisa
Asprinipaisfontes de pesquisa foramartigosientíos obtidosno portal de
periódi-osdaCAPES, aessívelnos laboratóriosdaUFRN.Algunsperiódios queontinham
artigosa prinípioimportantes para a realização do trabalhonão estavam disponíveis
noportalCAPES eem várias oasiõesfoi neessárioontatar osprópriosautoresdos
trabalhos na tentativa de obtê-los. Infelizmente a grande maioria não deu resposta,
mashouveosigniativoretornode MihaelLahanas,quealémdedisponibilizar
prati-amente todos os seus trabalhos ientíos em sua página pessoal 1
, este pesquisador
hegou aenviar publiaçõesque sequer haviamsido editadaspelos periódios.
1
3.3 Hardware
Os resultados dos testes foram obtidos utilizando uma estação equipada om
proes-sador Pentium
4
T M
2
.
2
GHz, om 128Mb de memória RAM. A estação utilizada é de
propriedadedoLaboratóriode Redesde Computadores(LaRC)doCEULP/ULBRAe
permaneeuvários mesesonetada à Internet vinte equatro horas pordia. Com este
artifíiofoi possívelrealizarimplementaçõese testes sem aneessidade de presença in
loo atravésdo uso de serviços de terminalremoto.
3.4 Software
Osprinipaissoftwares utilizadosforam:
•
Sistema operaionalSlakware Linux10
.
2
;•
Sistema operaionalMirosoft R Windows R XP Professional;•
Compilador C/C++ g-g++-3
.
4
.
5
;•
Compilador C/C++ Mirosoft RVisualC++ R
Toolkit
2003
;•
Compilador Fortran77
g-g77-3
.
4
.
5
;•
Compilador Fortran90
Intel RVisualFortran Compiler
9
.
0
;•
Mirosoft R.NET Framework
1
.
1
;•
Mirosoft RPlatform SDK
3790
.
1830
.O softwares Mirosoft R
.NET Framework
1
.
1
e Mirosoft RPlatform SDK
3790
.
1830
não foram utilizados diretamente. Ambos foram requisitados no momentodainstalação doIntel R
VisualFortran Compiler
9
.
0
.Foram utilizados ainda osseguintes softwares seundários:
•
SSH RSeure Shell for Workstations
3
.
2
;•
TerminalEmulator VaraTerm2
.
1
.
2
;•
TerminalEmulator Poderosa3
.
0
.
0
;•
openssh-4.2.Os quatro primeiros softwares são emuladores de terminal que possibilitaram a
utilização remota da estação que disponibilizava o serviço de terminal remoto. Este
serviçoeraprovidosoftware openssh-4.2, ujaprinipalvantagemde utilizaçãodeve-se
à segurança dos dados trafegados. O openssh-4.2 também fornee serviços seguros de
transferênia eópia de arquivos.
3.5 Metodologia
Assimquefoidenidootemadestetrabalho,zeram-seduasvisitasaumadasunidades
da LIGA Norte-Rio-Grandense Contra o Câner 2
. Os prossionais responsáveis pelo
setorde onologiaforambastante ateniososprestando várioseslareimentossobre os
proedimentosrealizadosnotratamentodepaientesomâner. Alémdeinformações
relativas às terapias, foram apresentados os vários equipamentos e ferramentas. As
visitasforamde grandeimportâniapara entendimentodas terapiasde tratamentode
paientesomânereproveuumamelhoreluidaçãodopróprioproblemanoontexto
deotimização. Comasobservaçõesfeitasnasvisitas,perebeu-sequeaontribuiçãodo
trabalhoseria algo quepudesse ser agregado aprodutosnais enãoo próprioproduto
nal em si.
Opassoseguintefoitentar obterasosde testeemnúmerorazoávelamdevalidar
possíveis testes omputaionais. Fizeram-se vários ontatos e apenas o pesquisador
Mihael Lahanasedeu asos de teste.
Os asos obtidos apresentavam informações relativas apenas às oordenadas
des-ritivas dos ontornos das estruturas anatmias. Isto gerou diuldades, pois era
neessário onheer também asoordenadas dos pontos que desreviamo interior das
estruturas. Fizeram-se algumas tentativas de utilização de métodos para a geração
dessas geometrias, omo é o aso do algoritmo de geração de pontos uniformemente
distribuídos[Lahanas etal.,2000℄. Contudo,perebeu-se queisso requeriaum esforço
tal que impossibilitava o desenvolvimento do algoritmo transgenétio paralelamente,
poisaténiaexigiaoentendimentode muitosoneitos externosaofoodaproposta.
O problema foi superado om o uso de uma rotina simpliada em C++ para a
geraçãodos pontos internosaos ontornos dos asos obtidos juntoa Mihael Lahanas.
Arotinafoi obtidajuntoa JaksonGomesde Souza 3
,aluno doprogramade mestrado
em engenharia elétriadaUFRN.
2
Mais informaçõespodemserenontradasnoendereçohttp://www.liga.org.br/
De posse de todos os pontos desritivos das geometrias, a tarefa seguinte foi riar
asinstânias fazendo-se os álulosde distânia 4
entre as oordenadas dos pontos das
posições de parada e as dos pontos das estruturas anatmias. Foi denido que seria
utilizada uma média de
500
pontos para desrever ada estrutura e que os valores dedoseseriamaluladosmedianteuma fonteradioativahipotétiaom taxaderadiação
iguala
1
. Istofoiassimdenidoporque nãoháneessidadedoalgoritmotrabalharomos valores reais que ertamente são menionados nos protoolos médios de terapias
ontra oâner, umavez queestá sendo realizadaapenas uma simulação. Noentanto,
a estrutura de implementação permite que se trabalhe om dados reais fazendo-se
modiaçõesnasfórmulasdeálulo. Emlinhasgeraisesteproedimentorequerapenas
aadição onstantes de multipliação.
Emseguida,zeram-setentativasde utilizaçãodométodoL-BFGS,umavez quejá
era onheido que o mesmo possuía implementações disponíveis. Como as
implemen-tações realizadas até então estavam esritas em C/C++ e o ódigo-fonte do método
estava disponível em Fortran
77
, tentou-se utilizar a ferramenta F2
C para realizar aonversão do ódigo em Fortran para C. O resultado da onversão foi um ódigo de
difíil legibilidade e que apresentava erros em tempo de exeução. Depois de
algu-mas busas na Internet, foi enontrada a bibliotea para C++ Unonstrained
Opti-mization [Mathematis,2005℄, aqualdisponibilizavauma versão anterior doL-BFGS,
hamadade BFGS, além de outrosmétodos similares.
Comoabiblioteaforneiamaisdeummétodo,iniialmenteforamrealizadostestes
de omparação dos métodos forneidos para identiar aquele que melhor pudesse
servir ao propósito do trabalho. Os testes realizados onstataram erta instabilidade
da bibliotea om a oorrênia de problemas provavelmente relativos às ondições de
parada dos métodos. Todos os métodos em algum momento aparentaram estar em
umarepetiçãoinnita,umavez quealgumasrodadasperduraramindenidamentesem
retornar qualquer resultado. Osdetalhes são mostrados na apêndieA. A autoriados
ódigos da bibliotea onstam omo pertenentes ao pesquisador Ali Katanforoush 5
,
o qual foi informado sobre os problemas. O pesquisador mostrou-se interessado em
veriaroque poderiaestar oorrendo requisitandoasfórmulasde álulodas funções
objetivoomsuas derivadas, asquaisestão desritas nasequações4.8,4.9, 4.10 e4.19.
A requisiçãofoi atendida, noentanto opesquisadornão deu retorno.
Emvistaaoproblemaanterior,aalternativaquerestoufoiimplementaremFortran
os ódigos das rotinas que requeriam o uso do L-BFGS, todas relativas ao ódigo
responsável por gerar a população iniial do algoritmo e o bano de informações. Na
primeira tentativa de implementação os ódigos foram esritos em Fortran
77
e por4
A fórmuladeáluloédesritanaequação4.7.
5
onta de algumas limitações da linguagem relativas a neessidades de odiação 6
,
resolveu-semudarparaFortran
90
. Assim,osresultadosretornadospeloódigoFortransão gravados em um arquivo texto que posteriormente é importado pelo algoritmo
transgenétioodiadoem C/C++.
6
Aprinipallimitaçãoenontradafoionãoforneimentodeestruturasparaaloaçãoedesaloação
Resultados e Disussão
O foo prinipal deste trabalho foi implementar um algoritmo transgenétio para a
denição dos tempos de parada de tratamentos baseados em braquiterapia de alta
taxade dose. Para tanto, foram realizadas as seguintes etapas para a implementação
doalgoritmo:
•
Obtenção de bloos de montagem;•
Geração e avaliação dapopulação iniial;•
Geração de agentes;•
Manipulação de indivíduos;•
Proesso imunológio.Amodelagemdoproblema,osdetalhesdeadaumadessasfaseseosresultadosobtidos
são omentados nas seções seguintes.
4.1 Modelag em
4.1.1 Representação da solução
Iniialmenteutilizou-seumromossomoformadopordoisonjuntos
T
eC
. Otamanhode ada onjunto orresponde ao número
n
de atéteres, de maneira queT
=
{
t
1
, t
2
, . . . , t
n
}
eC
=
{
c
1
, c
2
, . . . , c
n
}
. Cadaelementot
i
deT
eraumvetorontendode
t
i
eraigualaonúmerodeposiçõesde paradadorespetivoatéteri
. Cadaelementoc
i
deC
era um dado binário que assumia valor1
sinalizando que o atéteri
estavaativo(a fonte radioativairiatranspassar seu interior)e
0
aso ontrário.Embora esse tipo de modelagem tenha se mostrado bastante útil, optou-se por
um modelo mais simpliado, no qual o romossomo é um onjunto
T
de tempos deparada e ada elemento
t
i
é o próprio valor do tempo assoiado à posição de paradai
(anteriormente era o onjunto de tempos para o atéteri
). Assim, a representaçãonãoonsideraatéteres,massomenteaonatenaçãodesuasposiçõesdeparada,omo
ilustraa gura 4.1.
t
1
t
2
t
3
t
4
t
5
t
6
T
t
7
t
8
t
9
t
10
catéter c1
catéter c2
Figura4.1: Representação do romossomo
Comonãofoifeitaadistinçãodeatéteres,asposiçõesdeparadaforamidentiadas
de forma a manter sua orrespondênia original. Se há dois atéteres
c
1
ec
2
, porexemplo, ada um ontendo ino posições de parada, as primeiras ino posições do
romossomoestariam assoiadas ao primeiroatétere as demaisino aosegundo.
A não inlusãode atéteres narepresentação da solução permitiu uma maior
sim-pliidade na implementação das estratégias de manipulação de indivíduos, tornando
esse proedimento mais rápido. Um outro fator que motivou a desonsideração dos
atéteres foi oformato do arquivo de instânias, o qualapresenta posições de paradas
inativas e não atéteres inativos. A denição de quais posições de parada de quais
atéteres devem estar ativas ou não é uma tarefa referente à equipe responsável pelo
tratamento. Normalmente asposições entendidas omo inativas estão em loal
inade-quado por ausa das dimensões do atéter(deseja-se que apenas determinadas partes
domesmoestejamemdeterminadaregião)eautilizaçãodasmesmastendeadiultar
aobtenção de êxitono tratamento.
4.1.2 Fitness
variâniaforamempregadasno métodoL-BFGSparagerar apopulaçãoiniial. Neste
método, ousode funçõesobjetivobaseadasem DVH éinviávelporque taisfunçõesnão
possuemderivadas, sendo queo L-BFGSneessita doálulo daderivada da função a
ser otimizada.
4.1.2.1 Funções baseadas em variânia
Asfunções objetivo baseadas em variânia[Milikovi etal., 2002℄são:
f
S
=
1
N
S
N
s
X
i
=1
(
d
S
i
−
m
S
)
2
m
2
S
(4.1)
f
V
=
1
N
V
N
V
X
i
=1
(
d
V
i
−
m
V
)
2
m
2
V
(4.2)
f
OAR
=
1
N
OAR
N
X
OAR
i
=1
Θ(
d
OAR
i
−
D
OAR
c
m
OAR
)(
d
OAR
i
−
D
OAR
c
m
OAR
)
2
(
D
OAR
c
m
OAR
)
2
(4.3)
Θ(
x
) =
1
x >
0
1
/
2
x
= 0
0
x <
0
(4.4)
Onde:
•
f
S
,f
V
ef
OAR
são osvaloresdavariâniadadose,respetivamente, nasuperfíiedo tumor,no interior dotumor eno interior doórgão outeido em riso;
•
m
S
,m
V
em
OAR
são osvalores médiosdedose, respetivamente, nasuperfíiedotumor, interior dotumor e interior doórgão outeido em riso;
•
N
S
,N
V
eN
OAR
são os números de pontos representativos, respetivamente, nasuperfíie do tumor, no interior do tumor e no interior do órgão ou teido em
riso;
•
d
S
i
,d
V
i
ed
OAR
i
são os valores de dose noi
-ésimo ponto representativo,respeti-vamente, nasuperfíie dotumor, no interior dotumor e nointerior doórgão ou
teido em riso;
•
D
OAR
c
é a dose máximapermitida(ou dose rítia) sobre órgãos/teidossadios.valores forem, maior é onúmero de pontos om grandes disrepânias de dose, isto é,
aradiaçãoé muito altaem algunspontos e muito baixaem outros.
Para oálulo de
d
i
(d
S
i
,d
V
i
ed
OAR
i
),utiliza-sea seguinte equação:d
i
=
N
d
X
j
=1
t
j
d
e
ij
(4.5)Onde:
•
N
d
éo número total de posições de parada;•
t
j
é o tempo de parada daj
-ésima posição de parada;•
d
e
ij
éadose liberadanoi
-ésimopontoem vistadotempode paradat
j
daj
-ésimaposiçãode parada;
Osvalores
d
e
ij
são obtidospela fórmula:e
d
ij
=
S
k
d
2
ij
(4.6)
Onde:
•
S
k
étaxa de radiação dafonte radioativa;•
d
ij
é a distâniaexistente entre oi
-ésimo ponto eaj
-ésima posição de parada.Como as oordenadas geométrias dos pontos representativos e das posições de
paradaestão emum planotridimensional,asoordenadas
(
x, y, z
)
são onsideradasnoáluloda distânia. Assim, a distânia
d
ij
entre oi
-ésimo ponto e aj
-ésima posiçãode paradaé dada pela fórmula:
d
ij
=
q
(
x
i
−
x
j
)
2
+ (
y
i
−
y
j
)
2
+ (
z
i
−
z
j
)
2
(4.7)Onde
(
x
i
, y
i
, z
i
)
sãoasoordenadasdoi
-ésimopontorepresentativoe(
x
j
, y
j
, z
j
)
sãoAs funções objetivo baseadas em variânia também podem ser assim
esritas[Lahanas eBaltas, 2003℄:
f
S
=
1
N
S
m
2
S
N
S
X
i
=1
(
d
S
i
)
2
−
1
(4.8)f
V
=
1
N
V
m
2
V
N
V
X
i
=1
(
d
V
i
)
2
−
1
(4.9)f
OAR
=
1
N
OAR
m
2
OAR
N
X
OAR
i
=1
(
d
OAR
i
)
2
(4.10)
A grande vantagem em se utilizar essas funções está no fato de poder-se reduzir o
tempo de álulodas mesmasutilizandoasrelaçõesa seguir[Lahanas eBaltas, 2003℄:
N
X
i
=1
(
d
i
)
2
=
N
d
X
α
=1
x
2
α
g
α
(4.11)g
α
=
N
d
X
β
=1
x
2
β
D
αβ
, α
= 1
,
2
, . . . , N
d
(4.12)m
=
N
d
X
α
=1
x
2
α
f
m
α
(4.13)Onde: 1
•
N
é o númerode pontos representativos do objeto sob álulo;•
d
2
i
éo somatóriodos quadrados das doses em ada ponto representativo;•
m
éo valormédio dadose noobjeto;•
x
2
α
é ovalordotempopara a posição de paradaα
.Os valores
m
˜
α
e a matrizD
αβ
são obtidos pelas fórmulas aseguir[Lahanas eBaltas, 2003℄:
1
A simbologia pode ser modiada para identiar assoiação a uma estrutura partiular
aresentando-se os subsritos