Controlador Adaptativo por Modelo de Referˆ
encia e
Estrutura Vari´
avel Aplicado ao Controle de ˆ
Angulo
de Carga e Fluxo de Campo de um Gerador S´ıncrono
Marcus Vinicius Ara´
ujo Fernandes
Orientador: Prof. Dr. Aldayr Dantas de Ara´ujo Co-orientador: Prof. Dr. Ricardo L´ucio de Ara´ujo Ribeiro
Universidade Federal do Rio Grande do Norte Centro de Tecnologia
Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica e Computa¸c˜ao
Controlador Adaptativo por Modelo de Referˆ
encia e
Estrutura Vari´
avel Aplicado ao Controle de ˆ
Angulo
de Carga e Fluxo de Campo de um Gerador S´ıncrono
Marcus Vinicius Ara´
ujo Fernandes
Disserta¸c˜ao de Mestrado submetida ao Pro-grama de P´os-Gradua¸c˜ao em Engenharia El´etrica e Computa¸c˜ao da Universidade Fe-deral do Rio Grande do Norte (´area de con-centra¸c˜ao: Automa¸c˜ao e Sistemas) como parte dos requisitos para a obten¸c˜ao do grau de Mestre em Ciˆencias.
Orientador: Prof. Dr. Aldayr Dantas de Ara´ujo Co-orientador: Prof. Dr. Ricardo L´ucio de Ara´ujo Ribeiro
Fernandes, Marcus Vinicius Ara´ujo.
Controlador Adaptativo por Modelo de Referˆencia e Estrutura Vari´avel Aplicado ao Controle de ˆAngulo de Carga e Fluxo de Campo de um Gerador S´ıncrono / Marcus Vinicius Ara´ujo Fernandes. - Natal, RN, 2008
94 f.
Orientador: Aldayr Dantas de Ara´ujo.
Co-orientador: Ricardo L´ucio de Ara´ujo Ribeiro.
Disserta¸c˜ao (Mestrado) - Universidade Federal do Rio Grande do Norte. Centro de Tecno-logia. Programa de P´os-Gradua¸c˜ao em Engenharia El´etrica e Computa¸c˜ao.
1. Controle Adaptativo Robusto - Disserta¸c˜ao. 2. Sistemas com Estrutura Vari´avel -Disserta¸c˜ao. 3. Desacoplamento - -Disserta¸c˜ao. 4. Gerador S´ıncrono - -Disserta¸c˜ao. I. Ara´ujo, Aldayr Dantas de. II. Ribeiro, Ricardo L´ucio de Ara´ujo. III. Universidade Federal do Rio Grande do Norte. IV. T´ıtulo.
Controlador Adaptativo por Modelo de Referˆ
encia e
Estrutura Vari´
avel Aplicado ao Controle de ˆ
Angulo
de Carga e Fluxo de Campo de um Gerador S´ıncrono
Marcus Vinicius Ara´
ujo Fernandes
Disserta¸c˜ao de Mestrado aprovada em 23 de Outubro de 2008 pela banca axaminadora composta pelos seguintes membros:
Prof. Dr. Aldayr Dantas de Ara´ujo (orientador) DEE/UFRN
Prof. Dr. Ricardo L´ucio de Ara´ujo Ribeiro (co-orientador) DEE/UFRN
Prof. Dr. Jos´e ´Alvaro de Paiva CEFET/RN
Agradecimentos
Ao Professor Aldayr Dantas de Ara´ujo pelos ensinamentos e orienta¸c˜oes acadˆemicas desde a Inicia¸c˜ao Cient´ıfica ao Mestrado.
Ao Professor Ricardo L´ucio de Ara´ujo Ribeiro pelos ensinamentos e ajuda na sua especialidade estudada neste trabalho.
A todos os meus familiares e amigos, que me incentivaram e me apoiaram nessa etapa de minha vida. Em especial a minha m˜ae Denise; meu pai Nivaldo; meu irm˜ao Luiz; aos meus amigos: Bruno, Pedro, Rafael e Andr´e; e minha namorada Camila que me acompanharam e me apoiaram em todos os momentos.
Aos companheiros e amigos do LACI, entre eles: Kurios, ´Erico, Liviane, Marcelo e Iuri pelas ´avidas discuss˜oes acadˆemicas e n˜ao-acadˆemicas.
A todos os professores do PPGEEC que me transmitiram seus conhecimentos e ex-periˆencias profissionais durante este per´ıodo.
Nesta disserta¸c˜ao de mestrado ´e apresentada uma aplica¸c˜ao do Controlador Adapta-tivo por Modelo de Referˆencia e Estrutura Vari´avel em um Gerador S´ıncrono conectado a um barramento infinito, para o controle do ˆangulo de carga e fluxo de campo deste gerador. Uma teoria de desacoplamento ´e usada no modelo do Gerador S´ıncrono para se obter dois subsistemas, onde o ˆangulo de carga e o fluxo de campo podem ser controlados independentemente. A avalia¸c˜ao da estrat´egia de controle proposta ser´a realizada atrav´es de simula¸c˜oes para o modelo desacoplado do Gerador S´ıncrono. Tamb´em ser´a feita uma compara¸c˜ao com os controladores Proporcional Derivativo aplicado ao Gerador S´ıncrono desacoplado e Proporcional Integrativo Derivativo aplicado ao Gerador S´ıncrono aco-plado, sendo este ´ultimo, o sistema vigente hoje no Brasil. Os resultados das simula¸c˜oes comprovar˜ao a eficiˆencia e robustez desta estrat´egia de controle.
Abstract
In this dissertation an application of a Variable Structure Model Reference Adaptive Controller on a Synchronous Generator connected to an infinite-bus power system to control the generator’s load angle and field flux is presented. A decoupling theory is used on the Synchronous Generator model to obtain two subsystems, where load angle and field flux can be controlled independently. This control strategy evaluation shall be attained through simulations for the decoupled Synchronous Generator model. Then the control strategy proposed will be compared with the Proportional Derivative Controller applied for the decoupled Synchronous Generator model and the Proportional Integrative Derivative Controller applied for the coupled one, being this last one, the system used in Brazil nowadays. Simulation are used to verify the efficiency and robustness of this control strategy.
Lista de Figuras v
Lista de Tabelas vi
Gloss´ario de Termos vii
Lista de S´ımbolos viii
1 Introdu¸c˜ao 1
1.1 Motiva¸c˜ao e Objetivos . . . 1
1.2 Sistemas de Potˆencia . . . 2
1.2.1 Gerador S´ıncrono . . . 3
1.2.2 Sistema de Controle . . . 4
1.3 Controladores Adaptativos Robustos . . . 5
1.4 Estrutura da Disserta¸c˜ao . . . 7
2 Modelo Desacoplado do Gerador S´ıncrono 9 2.1 Introdu¸c˜ao . . . 9
2.2 Modelo do Gerador S´ıncrono . . . 10
2.3 Acoplamento . . . 13
2.4 Desacoplamento de um Sistema . . . 13
2.4.1 Algoritmo de Invers˜ao . . . 16
2.5 Modelo Desacoplado do Gerador S´ıncrono . . . 20
3 Controlador Adaptativo Robusto 24 3.1 Introdu¸c˜ao . . . 24
3.1.1 Sistemas de Controle . . . 24
3.1.2 Controle Cl´assico . . . 25
3.1.3 Controle Adaptativo . . . 26
3.2 Controle Adaptativo por Modelo de Referˆencia . . . 28
3.3 Sistemas com Estrutura Vari´avel . . . 33
3.3.1 Descri¸c˜ao Geral . . . 35
3.4 Controlador Adaptativo por Modelo de Referˆencia e Estrutura Vari´avel . . 36
4 Resultados das Simula¸c˜oes 42 4.1 Projeto dos Controladores . . . 42
4.1.1 Controle do Fluxo de Campo . . . 42
4.1.2 Controle do ˆAngulo de Carga . . . 44
4.2 Simula¸c˜oes . . . 45
4.2.1 Resultados das Simula¸c˜oes . . . 48
5 Conclus˜oes e Perspectivas 53 5.1 Conclus˜oes . . . 53
5.2 Perspectivas . . . 54
Apˆendices 55 A Conceitos sobre Sistemas 55 A.1 Representa¸c˜ao de um Sistema . . . 55
A.2 Fun¸c˜ao de Transferˆencia . . . 56
A.3 Polinˆomios Coprimos . . . 56
B Conceitos sobre Estabilidade 59 B.1 Defini¸c˜ao de Estabilidade . . . 59
B.2 M´etodo Direto de Lyapunov . . . 60
B.2.1 Fun¸c˜oes Definidas Positivas e Negativas . . . 60
B.2.2 Transla¸c˜ao da Origem do Sistema de Coordenadas . . . 60
B.2.3 Teoremas sobre Estabilidade (Segundo Lyapunov) . . . 61
C.1.2 Avalia¸c˜ao do Comportamento Transit´orio . . . 64
C.2 Robustez do Sistema de Controle . . . 64
C.2.1 Limita¸c˜ao da Resposta do Atuador . . . 65
C.2.2 Perturba¸c˜oes . . . 65
C.2.3 Atraso de Transporte . . . 66
C.2.4 Varia¸c˜oes Param´etricas . . . 66
C.2.5 Dinˆamica n˜ao Modelada . . . 67
C.2.6 Ru´ıdos de Medi¸c˜ao . . . 67
D Algoritmos 68 D.1 Controlador PI Aplicado ao Gerador S´ıncrono Acoplado . . . 68
D.2 Controlador PD Aplicado ao Gerador S´ıncrono Desacoplado . . . 71
D.3 VS-MRAC Aplicado ao Gerador S´ıncrono Desacoplado . . . 75
Bibliografia 87
Lista de Figuras
2.1 Esquema do modelo matem´atico do gerador s´ıncrono. . . 10
2.2 Sistema multivari´avel (MIMO) com duas vari´aveis de entrada e sa´ıda. . . . 13
2.3 Sistema inverso `a esquerda. . . 14
2.4 Sistema inverso `a direita. . . 14
2.5 Sistema multivari´avel (MIMO) com desacoplador. . . 15
2.6 Dois Subsistemas Monovari´aveis (SISO). . . 15
2.7 Diagrama de Blocos do Sistema. . . 15
3.1 Sistema de Controle. . . 24
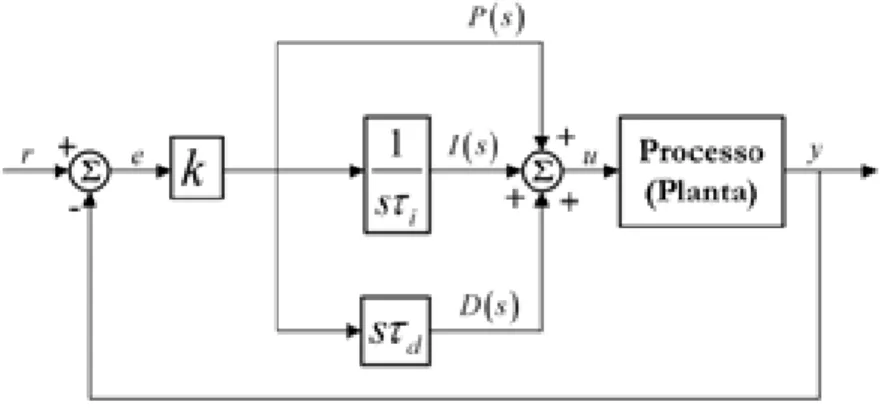
3.2 Controlador PID. . . 26
3.3 Estrutura de um Controlador Adaptativo. . . 27
3.4 MRAC direto. . . 30
3.5 Superf´ıcie de deslizamento em um sistema com estrutura vari´avel. . . 35
3.6 Diagrama de Blocos do VS-MRAC para plantas com grau relativo maior que 1. . . 37
4.1 Diagrama de Blocos Completo do Sistema Simulado. . . 43
4.2 Controle de um Gerador S´ıncrono Desacoplado com Varia¸c˜ao Param´etrica usando VS-MRAC. . . 49
4.3 Controle de um Gerador S´ıncrono Desacoplado com Perturba¸c˜ao na En-trada usando VS-MRAC. . . 50
4.4 Controle de um Gerador S´ıncrono Acoplado com Varia¸c˜ao Param´etrica usando Controladores PID. . . 50
4.5 Controle de um Gerador S´ıncrono Acoplado com Perturba¸c˜ao na Entrada usando Controladores PID. . . 51
trada usando Controladores PD. . . 52
Lista de Tabelas
3.1 Algoritmo do controlador MRAC convencional. . . 34 3.2 Algoritmo do controlador VS-MRAC compacto. . . 40
APPC Adaptive Pole Placement Controller (Controlador Adaptativo por Posi-cionamento de P´olos)
DMAC Dual Model Adaptive Controller (Controlador em Modo Dual Adapta-tivo)
DMARC Dual Mode Adaptive Robust Controller (Controlador em Modo Dual Adaptativo Robusto)
ERP Estritamente Real Positivo
IVS-MRAC Indirect Variable Structure Adaptive Model Reference Controller (Con-trolador Adaptativo Indireto por Modelo de Referˆencia e Estrutura Vari´avel)
MIMO Multiple Input, Multiple Output (Multivari´avel) MIT Massachusetts Institute of Technology
MRAC Model Reference Adaptive Controller (Controlador Adaptativo por Mo-delo de Referˆencia)
MRC Model Reference Controller (Controlador por Modelo de Referˆencia) PID Proporcional Integrativo Derivativo (controlador)
SISO Single Input, Single Output (Monovari´avel)
VS-APPC Variable Structure Adaptive Pole Placement Controller (Controlador Adaptativo por Posicionamento de P´olos e Estrutura Vari´avel)
VS-MRAC Variable Structure Model Reference Adaptive Controller (Controlador Adaptativo por Modelo de Referˆencia e Estrutura Vari´avel)
VSMFC Variable Structure Model-Following Controller (Controlador Seguidor de Modelo e Estrutura Vari´avel)
Lista de S´ımbolos
Sistema de Potˆ
encia
Parˆ
ametros do Modelo do Gerador S´ıncrono Conectado a um
Barramento Infinito
d constante de amortecimento (s)
H constante de in´ercia (s)
xd reatˆancia de armadura de eixo direto (p.u.)
xq reatˆancia de armadura de eixo em quadratura (p.u.)
x′
d reatˆancia transit´oria de eixo direto (p.u.)
xaf reatˆancia m´utua de eixo direto (p.u.)
xt reatˆancia da linha de transmiss˜ao (p.u.)
xf reatˆancia de campo (p.u.)
rf resistˆencia de campo (p.u.)
Te constante de tempo da excita¸c˜ao de campo (s)
ke ganho da excita¸c˜ao de campo (adimensional)
Tt constante de tempo da turbina (s)
Tg constante de tempo da governadora (s)
ω0 velocidade s´ıncrona (rad/s)
f freq¨uˆencia (Hz)
V voltagem no barramento infinito (p.u.)
δ ˆangulo rot´orico (rad)
ω perturba¸c˜ao na freq¨uˆencia (rad/s) Ψf fluxo de campo (p.u.)
Ef d voltagem de campo (p.u.)
Pm potˆencia mecˆanica no eixo (p.u.)
Pg potˆencia mecˆanica de sa´ıda da governadora (p.u.)
ue sinal atuando na excita¸c˜ao de campo (p.u.)
ug sinal atuando na v´alvula do regulador de velocidade (p.u.)
Pe potˆencia el´etrica gerada (p.u.)
Vt tens˜ao terminal (p.u.)
Sistema de Controle
Desacoplador
nin n´umero de entradas do sistema
nout n´umero de sa´ıdas do sistema
ˆ
u vetor de entradas do desacoplador
u1 entrada do desacoplador para o fluxo de campo (p.u.)
u2 entrada do desacoplador para o ˆangulo de carga (rad) ˆ
y sa´ıda do desacoplador
β ordem de rastreamento
Controlador
d grau do denominador da planta
dm denominador do modelo de referˆencia
dp denominador do modelo da planta
ea erro aumentado
e0 erro entre a sa´ıda da planta e a sa´ıda do modelo de referˆencia
e′
erro auxiliar
fi fun¸c˜ao de modula¸c˜ao do rel´ei
fN fun¸c˜ao de modula¸c˜ao do rel´eN
F−1
filtro passa baixa
G(s) modelo da planta
h passo de integra¸c˜ao
km ganho do modelo de referˆencia
kp ganho da planta
L(s) polinˆomio usado para tornar o produto M(s)L(s) ERP
M(s) modelo de referˆencia
n grau do numerador da planta
nm numerador do modelo de referˆencia
np numerador do modelo da planta
n∗
grau relativo
r sinal de referˆencia
ui sinal de controle do rel´e i
unom sinal de controle obtido do vetor de parˆametros nominais Θnom
(ui)eq sinal de controle equivalente
v1 filtro de entrada
v2 filtro de sa´ıda
ya predi¸c˜ao do erro
ym sa´ıda do modelo de referˆencia
Θ∗
vetor de parˆametros na condi¸c˜ao dematching Θ2n+1 estimativa para (Θ∗2n)
−1
Θnom vetor de parˆametros nominais
κ parˆametro auxiliar
κ∗
parˆametro auxiliar na condi¸c˜ao dematching
κnom parˆametro auxiliar nominal
χ vetor filtrado de entrada
ω vetor regressor
Cap´ıtulo 1
Introdu¸
c˜
ao
1.1
Motiva¸
c˜
ao e Objetivos
O grande avan¸co verificado na tecnologia anal´ogica e digital nos ´ultimos anos tem possibilitado o desenvolvimento de leis de controle bastante complexas, com a utiliza¸c˜ao de algoritmos n˜ao lineares. Como uma conseq¨uˆencia direta do desenvolvimento dessas leis, tem-se a possibilidade de representar o sistema que se deseja controlar, atrav´es de um modelo n˜ao linear bastante real´ıstico, em uma ampla regi˜ao do espa¸co de estado.
Entretanto, a maior parte das leis de controle, j´a implementadas, ainda foram dedu-zidas a partir da lineariza¸c˜ao do sistema em torno de um ponto de opera¸c˜ao nominal. Embora funcionem de uma forma bastante satisfat´oria nas aplica¸c˜oes normalmente pre-vistas, apresentam limita¸c˜oes que, para determinadas situa¸c˜oes, podem comprometer o desempenho do sistema.
Estas limita¸c˜oes devem-se ao fato de que o modelo do sistema s´o ´e v´alido em uma certa vizinhan¸ca do ponto de opera¸c˜ao nominal e que, para certos sistemas fortemente n˜ao lineares e com alto grau de acoplamento, esta vizinhan¸ca ´e bastante reduzida. Grandes perturba¸c˜oes no sistema e/ou a necessidade de grandes manobras, podem ultrapassar esta vizinhan¸ca. Al´em disso, para o caso em que h´a a necessidade de uma an´alise mais acurada do comportamento do sistema, o modelo linearizado pode n˜ao apresentar resultados muito satisfat´orios, tendo em vista que, na realidade, ´e uma simplifica¸c˜ao de um modelo mais elaborado.
(sistema) com uma modelagem bastante real´ıstica ´e controlado por um controlador adap-tativo robusto, o que diminui consideravelmente as limita¸c˜oes de utiliza¸c˜ao de um modelo linearizado. As leis de controle deduzidas baseiam-se em um algoritmo n˜ao linear e apre-sentam uma grande flexibilidade para melhorar o desempenho dinˆamico do sistema.
1.2
Sistemas de Potˆ
encia
Energia el´etrica ´e uma forma de energia baseada na gera¸c˜ao de diferen¸cas de potencial el´etrico entre dois pontos, que permitem estabelecer uma corrente el´etrica entre ambos. ´E uma das formas de energia que o homem mais depende e utiliza na atualidade, gra¸cas a sua facilidade de transporte e baixo ´ındice de perda energ´etica durante convers˜oes. Mediante a transforma¸c˜ao adequada ´e poss´ıvel que tal energia mostre-se em outras formas finais de uso direto, em forma de luz, movimento ou calor, segundo as leis de conserva¸c˜ao da energia.
A fun¸c˜ao de um sistema el´etrico de energia, ou sistema de potˆencia, ´e converter energia de uma das formas naturais dispon´ıveis para a forma el´etrica e transport´a-la at´e os pontos de consumo. Um sistema de potˆencia ´e constitu´ıdo por uma rede interligada por linhas de transmiss˜ao (transporte). Nessa rede est˜ao ligadas as cargas (pontos de consumo de energia) e os geradores (pontos de produ¸c˜ao de energia).
Idealmente, as cargas devem ser supridas com confiabilidade, al´em de tens˜ao e freq¨ uˆen-cia constantes em todos os instantes. ´E tamb´em necess´ario que os geradores n˜ao percam o sincronismo ap´os a ocorrˆencia de uma falta no sistema. Impactos de potˆencia aleat´orios podem ocorrer durante a opera¸c˜ao de um sistema de potˆencia e esta varia¸c˜ao de demanda deve ser suprida pelos geradores. Com o intuito de manter a estabilidade, diversos n´ıveis de controle atuam no sistema para manter essas caracter´ısticas [1].
Cap´ıtulo 1. Introdu¸c˜ao 3
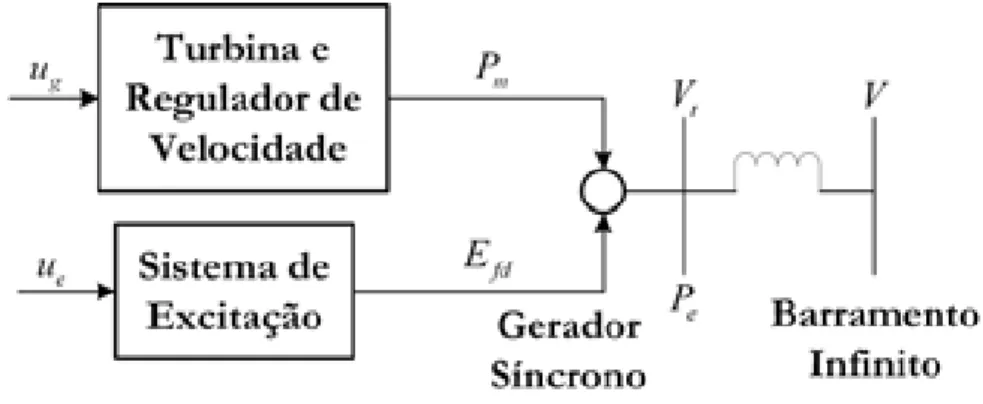
O objetivo da turbina ´e transformar a energia cin´etica em energia mecˆanica para que a m´aquina el´etrica, acoplada ao seu eixo, possa gerar a diferen¸ca de potencial necess´aria para o aparecimento de uma corrente el´etrica em uma certa potˆencia. O sistema condicionador de potˆencia tem composi¸c˜oes diversas que dependem da fonte prim´aria de energia utilizada e do tipo de m´aquina el´etrica. Em uma hidrel´etrica, por exemplo, esse sistema ´e composto por transformadores de potˆencia que ir˜ao condicionar a tens˜ao para a transmiss˜ao e por outros dispositivos para sincroniza¸c˜ao, prote¸c˜ao e supervis˜ao do sistema [2].
O sistema de controle atua com o objetivo de manter valores nominais de sa´ıda para o sistema, mantendo, por exemplo, tens˜ao e freq¨uˆencia constantes. Para tanto, s˜ao usados dois reguladores: o de tens˜ao que controla a tens˜ao nos terminais do gerador, atuando na tens˜ao aplicada (e, portanto, na corrente) no enrolamento do rotor (enrolamento de excita¸c˜ao), e o de velocidade que controla a freq¨uˆencia, atrav´es da varia¸c˜ao de potˆencia, atuando na v´alvula de entrada de ´agua da turbina. O regulador de velocidade tamb´em pode ser conhecido como governadora.
1.2.1
Gerador S´ıncrono
O Gerador S´ıncrono ´e o tipo de m´aquina el´etrica predominante nos sistemas de gera¸c˜ao de energia el´etrica. O nome s´ıncrono se deve ao fato de esta m´aquina operar com uma velocidade de rota¸c˜ao constante sincronizada com a freq¨uˆencia da tens˜ao el´etrica alternada presente nos terminais da mesma. Com o mesmo pode-se controlar a gera¸c˜ao de potˆencia ativa e reativa independentemente e ´e importante devido `as suas caracter´ısticas de controle de tens˜ao.
1.2.2
Sistema de Controle
O problema de controle de freq¨uˆencia e tens˜ao em geradores s´ıncronos em sistemas de potˆencia interligados ´e bastante complexo tendo em vista a caracter´ıstica multivari´avel (MIMO - Multiple Input, Multiple Output), imprecis˜ao no conhecimento dos parˆametros dos modelos das m´aquinas, presen¸ca de n˜ao linearidades e alto grau de acoplamento entre as vari´aveis [3].
Este acoplamento pode ser percebido ao se tentar controlar a freq¨uˆencia, atrav´es do regulador de velocidade, e observar uma varia¸c˜ao tamb´em na tens˜ao terminal desse gerador s´ıncrono. Assim como, ao se controlar a tens˜ao terminal, atrav´es do regulador de tens˜ao (excitatriz), observar uma varia¸c˜ao na vari´avel de freq¨uˆencia. Apesar da presen¸ca de acoplamento das vari´aveis do gerador s´ıncrono, ao se realizar o seu controle nas usinas geradoras de energia hoje no Brasil, este fato ´e desconsiderado.
O modelo utilizado para cada m´aquina ´e normalmente um modelo linearizado em torno do ponto de opera¸c˜ao em regime permanente e, conseq¨uentemente, n˜ao ´e adequado para grandes perturba¸c˜oes no sistema. ´E claro que um ´unico controlador para a excita¸c˜ao de campo e para o regulador de velocidade de cada m´aquina, utilizando um modelo mais completo do sistema, tornaria bem melhor o desempenho deste.
Tradicionalmente, o controle de um sistema de potˆencia ´e feito da seguinte forma. Para cada m´aquina, considera-se o restante do sistema como um barramento infinito e, por simplicidade, projeta-se o controlador da excita¸c˜ao de campo independentemente do regulador de velocidade. Assumindo torque mecˆanico de entrada constante, projeta-se o controlador da excita¸c˜ao de campo para regular a tens˜ao terminal e aumentar o dom´ınio de estabilidade do gerador. Assumindo fluxo de campo constante, projeta-se o controlador para o regulador de velocidade, regulando a potˆencia e a freq¨uˆencia simultaneamente.
Cap´ıtulo 1. Introdu¸c˜ao 5
Uma estrat´egia alternativa de controle ´e apresentada nesta disserta¸c˜ao, na qual as mesmas vari´aveis de entrada usadas nas estrat´egias de controle padr˜ao (tens˜oes aplicadas na excitatriz e no regulador de velocidade) s˜ao usadas para controlar diretamente dife-rentes vari´aveis de sa´ıda do gerador s´ıncrono (ˆangulo de carga e fluxo de campo) com um controlador adaptativo robusto ([4], [5] e [6]). Assim, como resultado dessa estrat´egia, ´e esperado um aumento do dom´ınio de estabilidade, devido ao controle do ˆangulo de carga diretamente, mantendo o sincronismo do sistema de potˆencia, assim como, indiretamente, a tens˜ao e a freq¨uˆencia em seus valores nominais. Ser´a ainda aplicada uma teoria de desacoplamento e sistema inverso para sistemas n˜ao lineares ([7], [8], [9] e [10]).
Em [11] e [12], diferentes estrat´egias de controle s˜ao testadas em geradores s´ıncronos e comparadas ao controlador PID, todos na estrat´egia padr˜ao de controle (excitatriz e regulador de velocidade controlam tens˜ao terminal e fluxo de potˆencia [1]).
Os artigos a seguir aplicaram uma teoria de desacoplamento em um gerador s´ıncrono. Em [13], o uso de controladores adaptativos ´e ressaltado como essencial para o controle de grandes sistemas de potˆencia apresentando um r´apido transit´orio e melhorando o de-sempenho. Uma t´ecnica de desacoplamento atrav´es do M´etodo da Perturba¸c˜ao Singular ´e usada em [14] e [15], particionando o sistema em dois subsistemas com diferentes escalas de tempo para o controle do gerador s´ıncrono.
Em [10] e [16], uma fun¸c˜ao de reprodutibilidade assint´otica ´e aplicada ao modelo de um gerador s´ıncrono, atrav´es de uma t´ecnica de desacoplamento ([7], [8] e [9]). Em [17] e [18], ´e apresentado um esquema de controle de um robˆo m´ovel com desacoplamento, similar ao usado nesta disserta¸c˜ao. Em [19] e [20], o gerador s´ıncrono ´e desacoplado atrav´es do acionamento vetorial orientado pelo fluxo estat´orico.
1.3
Controladores Adaptativos Robustos
aplica¸c˜oes bem sucedidas ([26], [27] e [28]). Nos trabalhos [23] e [29] demonstrou-se que os controladores MRAC poderiam ser inst´aveis na presen¸ca de pequenos dist´urbios, fato esse somente corrigido com a proposta dos controladores adaptativos robustos ([23], [30] e [31]).
Nos dias de hoje, ainda se busca um controlador adaptativo robusto, com um bom comportamento tanto no transit´orio como em regime permanente. Tem-se obtido bons resultados integrando-se duas ou mais t´ecnicas distintas, explorando o que cada uma tem de melhor. Em [32] e [33], controladores adaptativos s˜ao testados e afirmados como uma alternativa confi´avel `a solu¸c˜ao usual de controle PID.
Um exemplo bem sucedido de associa¸c˜ao de t´ecnicas distintas ´e o Controlador Adapta-tivo por Modelo de Referˆencia e Estrutura Vari´avel ([34], [35], [36], [37] e [38]) (VS-MRAC - Variable Structure Model Reference Adaptive Controller), o qual associa a estrutura vari´avel [39] do Controlador por Estrutura Vari´avel [40] (VSC -Variable Structure Con-troller) com modos deslizantes a uma estrutura do MRAC.
O controlador MRAC convencional usa leis integrais de adapta¸c˜ao e faz com que a sa´ıda da planta siga a sa´ıda de um modelo de referˆencia especificado ([4], [5], [6] e [41]). Em geral o MRAC possui um transit´orio lento e oscilat´orio. Ent˜ao, em [34] foi proposto o controlador VS-MRAC que utiliza a estrutura do MRAC, substituindo as leis integrais de adapta¸c˜ao por leis chaveadas, assim resultando em um sinal de controle chaveado, como nos sistemas a estrutura vari´avel ([38], [42] e [43]). Apesar do bom desempenho transit´orio, em geral tem-se a presen¸ca do fenˆomeno de chaveamento em alta freq¨uˆencia, tamb´em conhecido como chattering.
Cap´ıtulo 1. Introdu¸c˜ao 7
Placement Controller) e Controlador Adaptativo Backstteping [50], respectivamente. Em [51] e [52] o Controlador Seguidor de Modelo e Estrutura Vari´avel (VSMFC - Variable Structure Model-Following Controller) ´e apresentado e aplicado.
Para utilizar o que havia de melhor entre as t´ecnicas adaptativas da literatura, foram propostos controladores que utilizavam a uni˜ao de duas t´ecnicas adaptativas. Em [53] foi proposta uma estrutura de Controle em Modo Dual Adaptativo (DMAC - Dual Model Adaptive Controller) para uma classe de sistemas n˜ao lineares, a qual utiliza uma rede neural para adaptativamente compensar a n˜ao linearidade da planta. A estrat´egia de aprendizado da rede neural ´e baseada na combina¸c˜ao entre os parˆametros de adapta¸c˜ao do aprendizado e um controle por estrutura vari´avel.
O Controlador em Modo Dual Adaptativo Robusto ([54], [55] e [56]) (DMARC -Dual Mode Adaptive Robust Controller) que foi proposto em [54] faz um liga¸c˜ao entre o MRAC convencional e o VS-MRAC. O objetivo ´e conseguir um sistema robusto, com desempenho transit´orio r´apido e pouco oscilat´orio (caracter´ısticas do VS-MRAC), e sinal de controle suave em regime permanente (caracter´ıstica do MRAC). A transi¸c˜ao entre as duas estrat´egias de controle ´e feita, em tempo real, atrav´es de um parˆametro que varia em fun¸c˜ao do erro entre a sa´ıda da planta e a sa´ıda do modelo de referˆencia (ou de um erro auxiliar para o caso de plantas com grau relativo maior que 1).
T´ecnicas de Estrutura Vari´avel com Modo Observador s˜ao usadas para o controle de um gerador s´ıncrono com o m´etodo da Perturba¸c˜ao Singular ([14], [15], [57], [58], [59] e [60]) e com o Princ´ıpio do Bloco de Controle ([57], [58], [59] e [60]). Em [52], o controle da excitatriz de um gerador s´ıncrono ´e investigado por diversos controladores: MRAC, VSMFC e PI. Em [17] e [18], ´e apresentado um esquema de controle de um robˆo m´ovel com desacoplamento utilizando dois DMARCs independentes para cada subsistema desacoplado, de uma forma similar `a estrat´egia apresentada nesta disserta¸c˜ao.
1.4
Estrutura da Disserta¸
c˜
ao
formando o modelo desacoplado do gerador s´ıncrono.
No cap´ıtulo 3 s˜ao apresentados os controladores adaptativos e cl´assicos utilizados na disserta¸c˜ao, entre eles: PID, MRAC e VS-MRAC.
No cap´ıtulo 4 s˜ao apresentadas as simula¸c˜oes dos controladores aplicados ao modelo do gerador s´ıncrono desacoplado e s˜ao realizadas compara¸c˜oes com a estrutura cl´assica do controlador PID aplicada ao modelo do gerador s´ıncrono desacoplado..
Cap´ıtulo 2
Modelo Desacoplado do Gerador
S´ıncrono
2.1
Introdu¸
c˜
ao
Na m´aquina s´ıncrona operando como gerador, a energia mecˆanica ´e suprida pela aplica¸c˜ao de um torque ao seu eixo. Esta fonte de energia mecˆanica pode ser, por exem-plo, uma turbina hidr´aulica, a g´as ou a vapor. Para que a m´aquina s´ıncrona seja capaz de efetivamente converter a energia mecˆanica aplicada ao seu eixo, ´e necess´ario que o enrolamento de campo localizado no rotor da m´aquina seja alimentado por uma fonte de tens˜ao cont´ınua de forma que, ao girar o campo magn´etico gerado pelos p´olos do rotor, exista um movimento relativo aos condutores dos enrolamentos do estator.
Devido a esse movimento relativo entre o campo magn´etico dos p´olos do rotor e o estator, a intensidade do campo magn´etico que atravessa os enrolamentos do estator ir´a variar no tempo, e assim teremos pela lei de Faraday uma indu¸c˜ao de tens˜oes nos terminais dos enrolamentos do estator. Devido a distribui¸c˜ao e disposi¸c˜ao espacial do conjunto de enrolamentos do estator, as tens˜oes induzidas em seus terminais ser˜ao alternadas senoidais trif´asicas [61].
ge-radores interligados, a excita¸c˜ao do campo ir´a controlar a potˆencia reativa gerada. Uma vez estando o gerador ligado `a rede el´etrica, sua rota¸c˜ao ´e ditada pela freq¨uˆencia da rede, pois a freq¨uˆencia da tens˜ao trif´asica depende diretamente da velocidade da m´aquina [1].
O modelo utilizado para cada m´aquina s´ıncrona ´e normalmente, um modelo lineari-zado em torno do ponto de opera¸c˜ao em regime permanente e, conseq¨uentemente, n˜ao ´e adequado para grandes perturba¸c˜oes no sistema. Perturba¸c˜oes, tais como, desligamento de linhas, sa´ıda de geradores e mudan¸cas de carga, podem afetar seriamente o comporta-mento do sistema, e para isso, um modelo n˜ao linear se faz necess´ario.
Nesta disserta¸c˜ao, considera-se o controle de sistemas de potˆencia submetidos a faltas severas que ´e considerado um problema de grande importˆancia [1]. Para isso, utiliza-se um modelo n˜ao linear que inclui o efeito de p´olos salientes no desempenho da m´aquina s´ıncrona, e que considera a varia¸c˜ao do fluxo de campo no per´ıodo transit´orio. Ademais, uma teoria de desacoplamento e sistema inverso `a direita para sistemas n˜ao lineares ([7] e [8]) ´e usada no modelo do gerador s´ıncrono [9], para que dois subsistemas independentes sejam obtidos [10].
2.2
Modelo do Gerador S´ıncrono
O modelo matem´atico de um sistema de potˆencia ligado a um barramento infinito ´e similar ao usado em [9] e pode ser representado atrav´es da Figura 2.1. Os parˆametros e vari´aveis s˜ao definidos em [62].
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 11
A m´aquina s´ıncrona (2.1) ´e representada por ¨
δ=p1sin 2δ−p2δ˙−p3Ψfsinδ+p4Pm
˙
Ψf =p5cosδ−p6Ψf +p7Ef d
(2.1)
onde δ ´e o ˆangulo rot´orico, Ψf ´e o fluxo de campo, Pm ´e a potˆencia mecˆanica no eixo e
Ef d ´e a voltagem de campo.
O sistema de excita¸c˜ao (2.2) ´e dado por
TeE˙f d =−Ef d+keue (2.2)
onde Te ´e a constante de tempo da excita¸c˜ao de campo, ke ´e o ganho da excita¸c˜ao de
campo eue ´e o sinal atuando na excita¸c˜ao de campo.
A turbina (2.3) e o regulador de velocidade (2.4) s˜ao representados por
TtP˙m =−Pm+Pg (2.3)
onde Tt ´e a constante de tempo da turbina e Pg ´e a potˆencia mecˆanica de sa´ıda da
governadora.
TgP˙g =−Pg+ug (2.4)
onde Tg ´e a constante de tempo da governadora e ug ´e o sinal atuando na v´alvula do
regulador de velocidade.
Os parˆametros do gerador s´ıncrono [62] s˜ao
p1 =
ω0V2(xq−x′d)
4H(xt+x′d) (xt+xq)
p2 =
ω0d
2H p3 =
ω0V xaf
2Hxf(xt+x′d)
p4 =
ω0
2H p5 =
ω0rfV xaf
xf(xt+x′d)
p6 =
ω0rf(xt+xd)
xf (xt+x′d)
p7 =
ω0rf
xf
x′
d =xd−
x2af xf
ω0 = 2πf
As sa´ıdas escolhidas para serem controladas s˜ao o fluxo de campo Ψf e o ˆangulo de
carga δ, pois al´em de facilitarem a modelagem do sistema para o desacoplamento, tˆem um importante papel na an´alise de estabilidade de um sistema de potˆencia. Escrevendo as equa¸c˜oes do gerador s´ıncrono na forma vetorial segue
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩ ˙
x(t) =A(x) +Bu, x∈R6
y(t) = C(x) = ⎡
⎣
ψf
δ
⎤
⎦, y(t)∈R2
onde x= ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ δ ω Ψf
Ef d
Pm Pg ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ (2.6) u= ⎡ ⎣ ue ug ⎤
⎦, u∈R2 (2.7)
A(x) = ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ a1 a2 a3 a4 a5 a6 ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ = ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ω
p1sin 2δ−p2ω−p3ψfsinδ+p4Pm
p5cosδ−p6ψf +p7Ef d
−Ef dTe−1
−(Pm+Pg)T −1 t
−PgT −1 g ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ (2.8) B = ⎡ ⎣
0 0 0 keTe−1 0 0
0 0 0 0 0 T−1 g
⎤
⎦
T
(2.9)
eω = ˙δ ´e a perturba¸c˜ao na freq¨uˆencia.
A partir das vari´aveis escolhidas para serem controladas (fluxo de campo e ˆangulo de carga) ´e poss´ıvel calcular a potˆencia el´etrica geradaPe e a tens˜ao terminal Vt [62]
Pe =
−p1sin 2δ+p3Ψfsinδ
p4
(2.10)
Vt=
V xqsinδ
xq+xt
2 +
V x′ dcosδ
x′ d+xt
+ xafxtΨf (x′
d+xt)xf
2
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 13
2.3
Acoplamento
Freq¨uentemente dois ou mais sistemas f´ısicos interagem entre si, tornando imposs´ıvel a solu¸c˜ao independente de qualquer um destes sistemas sem que as solu¸c˜oes dos demais sejam simultaneamente consideradas. Tais sistemas s˜ao denominados acoplados, sendo a intensidade do acoplamento fun¸c˜ao do grau de intera¸c˜ao entre os sistemas componentes.
Formula¸c˜oes de sistemas acoplados s˜ao aquelas aplic´aveis a vari´aveis dependentes e dom´ınios m´ultiplos, os quais usualmente (mas n˜ao necessariamente) descrevem diferentes fenˆomenos f´ısicos e nos quais nenhum dos dom´ınios pode ser resolvido de forma separada dos demais; ou nenhum conjunto de vari´aveis pode ser explicitamente eliminado ao n´ıvel de equa¸c˜oes diferenciais, caso do gerador s´ıncrono. Na an´alise de sistemas acoplados ´e usual que um ou mais dos dom´ınios considerados possuam comportamento n˜ao linear, comportamento esse que deve ser considerado de forma apropriada.
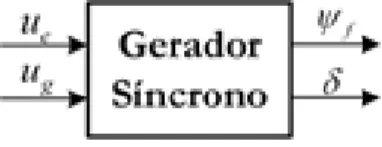
As vari´aveis do modelo das m´aquinas s´ıncronas possuem um alto grau de acoplamento (Figura 2.2). O problema do acoplamento acontece quando a altera¸c˜ao de qualquer uma das entradas interfere nas suas sa´ıdas simultaneamente. Por exemplo, alterando-se o sinal na excitatriz ue, interfere-se no fluxo de campo Ψf e no ˆangulo de carga δ e alterando-se
o sinal no regulador de velocidade ug, interfere-se no fluxo de campo Ψf e no ˆangulo de
cargaδ. Como solu¸c˜ao para este problema ser´a aplicada uma teoria de desacoplamento e sistema inverso para sistemas n˜ao lineares ([7] e [8]).
Figura 2.2: Sistema multivari´avel (MIMO) com duas vari´aveis de entrada e sa´ıda.
2.4
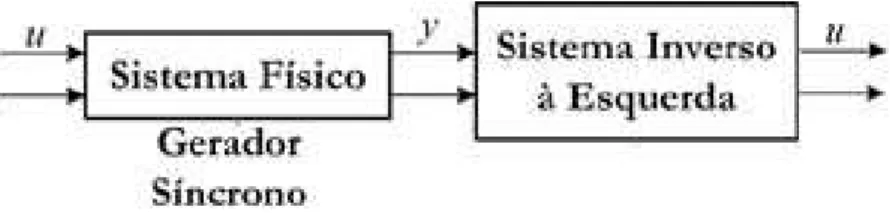
Desacoplamento de um Sistema
uma certa sa´ıda desejada e por isso serve como um controlador, for¸cando a sa´ıday(t) do sistema original a seguir o sinal desejado [8].
Figura 2.3: Sistema inverso `a esquerda.
Figura 2.4: Sistema inverso `a direita.
O m´etodo de invers˜ao de sistemas n˜ao lineares transforma um sistema originalmente multivari´avel (MIMO - Multiple Input, Multiple Output) em um grupo de sistemas mo-novari´aveis (SISO - Single Input, Single Output). O desacoplamento do sistema ´e feito por uma t´ecnica de invers˜ao de sistemas n˜ao lineares. Para garantir que se tenha um sistema inverso est´avel, o sistema em discuss˜ao deve ser de fase m´ınima (Apˆendice A) com a dinˆamica de estado nulo, se existente, assintoticamente est´avel.
Devido ao alto grau de acoplamento entre as vari´aveis do modelo das m´aquinas s´ıncronas, uma teoria de desacoplamento ([7] e [8]) para sistemas n˜ao lineares ´e usada [9]. Para o uso deste algoritmo de desacoplamento no gerador s´ıncrono, um sistema in-verso ´e obtido de forma que apenas uma das entradas atue no ˆangulo de carga e a outra, apenas no fluxo de campo. ´E necess´ario tamb´em que os parˆametros do gerador s´ıncrono sejam conhecidos com exatid˜ao, mas, comumente estes parˆametros s˜ao conhecidos com incertezas [10].
O desacoplador para o gerador s´ıncrono ´e um sistema de duas entradas (nin = 2) e
duas sa´ıdas (nout = 2) com as sa´ıdas ligadas como entradas do gerador. Ao se alterar uma
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 15
alterando-se u1, s˜ao gerados ue e ug de forma que apenas Ψf seja alterada. Da mesma
forma, alterando-se u2, s˜ao gerados ue e ug de forma que apenas δ seja alterada (Figura
2.5). Para o gerador, um sistema inverso ser´a obtido de forma que apenas uma das entradas atue no ˆangulo de carga e a outra entrada atue no fluxo de campo do rotor, obtendo-se, ent˜ao, dois sistemas monovari´aveis (SISO) independentes (Figura 2.6).
Figura 2.5: Sistema multivari´avel (MIMO) com desacoplador.
Figura 2.6: Dois Subsistemas Monovari´aveis (SISO).
Nesta disserta¸c˜ao ´e usada a t´ecnica do sistema inverso `a direita para o modelo do gerador s´ıncrono desacoplado ligado ao barramento infinito. Isso ´e alcan¸cado de forma que cada sa´ıda do gerador s´ıncrono seja modificada apenas por uma entrada do sistema inverso `a direita. Na Figura 2.7, o diagrama de blocos completo do sistema de controle ´e apresentado.
A caixa tracejada (Figura 2.7) indica os modelos usados para a planta desacoplada nas simula¸c˜oes. O algoritmo de desacoplamento ([7] e [8]) consiste na deriva¸c˜ao do vetor de sa´ıda consecutivamente at´e que se encontre uma matriz Dβ (onde β ´e a ordem de
rastreamento) que admita pseudo-inversa. Logo, as entradas do sistema inverso `a direita s˜ao essas derivadas das sa´ıdas do gerador s´ıncrono e, quando ´e considerado como um
sistema, o sistema inverso `a direita conectado ao gerador s´ıncrono (caixa tracejada) ´e formado por dois sistemas desacoplados compostos por integradores puros.
Devido aos parˆametros do gerador s´ıncrono serem, em geral, conhecidos com incerte-zas [13], o desacoplamento n˜ao gera integradores puros. Esta ´e uma raz˜ao a mais para determinar o uso de um controlador adaptativo. Se as equa¸c˜oes usadas como fun¸c˜ao de transferˆencia dos subsistemas para c´alculo dos parˆametros dos controladores forem inte-gradores puros (o que significa que o desacoplamento ´e completo), as demais dinˆamicas geradas no sistema inverso `a direita acoplado ao gerador s´ıncrono s˜ao tratadas como dinˆamicas n˜ao modeladas (Apˆendice C).
2.4.1
Algoritmo de Invers˜
ao
Considerando uma classe de sistemas n˜ao lineares da forma ⎧
⎨
⎩ ˙
x(t) = A(x(t)) +B(x(t))u(t); x∈M
y(t) = C(x(t)) (2.12)
ondeM ⊂ ℜn (espa¸co euclidiano de dimens˜aon) ´e o espa¸co de estado,A, B
1, . . . , Bm s˜ao
fun¸c˜oes vetoriais anal´ıticas reais em M e u = [u1, . . . , ui], onde ui e i = 1, . . . , m ´e uma
fun¸c˜ao anal´ıtica real de [0,∞) emℜ.
Para o sistema 2.12 pode-se associar inversibilidade `a esquerda e/ou `a direita. A seguir, o algoritmo original para invers˜ao de sistemas n˜ao lineares multivari´aveis desenvolvido em [7] e [8] ser´a apresentado de uma forma mais simples, utilizando os conhecimentos usuais da ´algebra matricial e da resolu¸c˜ao de equa¸c˜oes diferenciais.
Defini¸c˜ao 2.4.1 O sistema n˜ao linear ´e invers´ıvel `a direita se, para qualquer sa´ıda de-sej´avel y∗
(·) = f(·) definida em [0,∞), existe um controle u(·) e uma escolha de x0, tal quey(t) =y∗
(t) =f(t) para todo t∈[0,∞).
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 17
O algoritmo de invers˜ao ser´a aplicado ao caso em estudo nesta disserta¸c˜ao, no qual o n´umero de sa´ıdas do sistema nout ´e igual ao n´umero de entradas nin. Para aplicar o
algoritmo ser´a necess´ario derivar o sinal de sa´ıda y(t) do sistema 2.12, consecutivamente, obtendo uma seq¨uˆencia de sistemas. O primeiro passo ´e
dy dt =y
(1)= dC(x)
dt =C
1(x) +D1(x)u (2.13)
e este procedimento continuar´a at´e que se obtenha uma matrizDβ(x) que seja invers´ıvel.
Derivando-se o sinal de sa´ıda do sistema 2.12, obt´em-se Sistema 1:
⎧ ⎨
⎩ ˙
x(t) =A(x) +B(x)u; x∈M1 ⊂M
z1 =C1(x) +D1(x)u
(2.14)
onde
z1 =R0
dy dt C1(x) =R0C1(x)
D1(x) = R0D1(x)
eR0 ´e uma matriz elementarnout×nin que reordena as linhasD1(x), tal que as primeiras
r1 linhas sejam linearmente independentes para algum x∈M1. Denomina-ser1 de ´ındice de inversibilidade do sistema 1.
Constr´oi-se, ent˜ao, indutivamente uma seq¨uˆencia de sistemas n˜ao lineares, tal que o k-´esimo sistema seja
Sistema k:
⎧ ⎨
⎩ ˙
x(t) = A(x) +B(x)u; x∈Mk ⊂M
zk =Ck(x) +Dk(x)u
(2.15)
onde Mk ´e um subconjunto de M, Ck(x) e Dk(x) s˜ao matrizes nout ×1 e nout × nin,
respectivamente, cujos elementos s˜ao fun¸c˜oes anal´ıticas reais emMk, e
Dk(x) =
⎡
⎣
Dk1(x)
0 ⎤
⎦
com Dk1 sendo a matrixrk×nin de posto rk para todox∈Mk.
Na constru¸c˜ao acima, ´e produzida uma seq¨uencia de inteiros n˜ao negativosr1, r2, . . . , rk
onde rk ´e denominado ´ındice de inversibilidade do k-´esimo sistema. Por constru¸c˜ao 0≤
Defini¸c˜ao 2.4.2 A ordem de rastreamento β do sistema 2.12 ´e definida como o m´ınimo inteiro k tal que rk =nout ou β =∞ se rk < nout para todo k >0 [8].
Para continuar o desenvolvimento da teoria de invers˜ao de sistemas, deve-se garan-tir que a sa´ıda zk do k-´esimo sistema, para todo k > 0, ´e dependente da entrada u(·)
implicitamente e n˜ao explicitamente.
Teorema 2.4.1 Seja o sistema n˜ao linear 2.12 com ordem de rastreamento β <∞, ou seja, finita.
Se β ≥2 e
BiAjRk(·)≡0emM (2.16)
para 0≤k ≤β−2, 0≤j ≤β−2−k, ei= 1, . . . , nin, ent˜ao, a sa´ıda do k-´esimo sistema
2.12 pode ser decomposta como
zk=
⎡ ⎣ ¯ zk ˆ zk ⎤ ⎦= ⎡ ⎣
Hk(x)
Jk(x)
⎤
⎦yk =Kk(x)yk (2.17)
onde yT k =
(y(1))T . . . (y(k))T e y(i)= dy
i
dti.
Isto significa dizer que a sa´ıda zk do k-´esimo sistema, k = 1, . . . , β, ´e dependente
implicitamente da entradau(·). Tem-se, ent˜ao,
zk(x) =
⎡
⎣
Hk(x)
Jk(x)
⎤
⎦yk =
⎡
⎣ ¯
Ck(x)
ˆ
Ck(x)
⎤
⎦+ ⎡
⎣
Dk1(x) 0
⎤
⎦u(t) (2.18) Observa-se, que para β <∞, o β-´esimo sistema ´e dado por
Sistemaβ:
⎧ ⎨
⎩ ˙
x=A(x) +B(x)u; x∈Mβ
zβ =Cβ(x) +Dβ(x)u
(2.19)
onde a matriz Dβ(x)nout×nin de posto nout tem a inversaD −1
β (x) em Mβ
zβ =Kβ(x)yβ =Hβ(x)yβ
onde Hβ(x) ´e uma matriz nout×βnout.
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 19
Em [8] ´e desenvolvida uma condi¸c˜ao suficiente para a reprodutibilidade funcional.
Teorema 2.4.2 Seja o sistema n˜ao linear 2.12 com ordem de rastreamento β < ∞ e, para β ≥2, sup˜oe-se que a condi¸c˜ao 2.16 seja satisfeita.
Seja f(t) uma fun¸c˜ao anal´ıtica real e o estado inicial x(0) =x0 ∈ Mβ. Ent˜ao, f(·) =
y(·, u, x0) para algum controle admiss´ıvel u, se e somente se,
f(0) =C(x0) e
Jk(x0)Fk(0) = ˆCk(x0), parak= 1, . . . , β−1
onde
Fk(t) =
⎡
⎢ ⎢ ⎢ ⎣
f(1)(t) ...
f(k)(t) ⎤
⎥ ⎥ ⎥ ⎦
Corol´ario 2.4.1 Seja o sistema n˜ao linear 2.12 com ordem de rastreamento β < ∞ e, para β ≥2, sup˜oe-se que a condi¸c˜ao 2.16 seja satisfeita. Ent˜ao, o sistema
⎧ ⎨
⎩ ˙ˆ
x= ˆA(ˆx) + ˆB(ˆx) ˆu; xˆ∈Mβ, xˆ(0) =x0 ˆ
y= ˆC(ˆx) + ˆD(ˆx) ˆu
(2.20)
com
ˆ
A(ˆx) =A(ˆx)−B(ˆx)D∗
β(ˆx)Cβ(ˆx)
ˆ
B(ˆx) =B(ˆx)D∗
β(ˆx)Hβ(ˆx)
ˆ
C(ˆx) = −D∗
β(ˆx)Cβ(ˆx)
ˆ
D(ˆx) =D∗
β(ˆx)Hβ(ˆx)
D∗
β(ˆx) =D T β
DβDTβ
−1
(2.21)
atua como um sistema inverso `a direita para o sistema 2.12 [8], onde uˆe yˆs˜ao a entrada e a sa´ıda do sistema inverso `a direita, respectivamente.
Em particular, se f(·) pode ser reproduzida por y(·, u, x0) para algum u e x0 ∈ Mβ,
ent˜ao, f(·) = y(·, uf, x0) onde uf = ˆy(·, Fβ, x0). Em [10], o algoritmo de invers˜ao ([7]
2.5
Modelo Desacoplado do Gerador S´ıncrono
Ao sistema 2.5, aplica-se a t´ecnica de invers˜ao `a direita desenvolvida em [7] e [8], resultando em dois sistemas desacoplados e, assim, ´e poss´ıvel projetar um controlador para cada um dos subsistemas resultantes.
O n´umero de entradas e sa´ıdas (nin =nout) ´e igual a 2, e foi aplicado o algoritmo de
invers˜ao ([7] e [8]), previamente detalhado. O resultado ap´os a aplica¸c˜ao do algoritmo, para este caso, ser´a uma seq¨uencia de quatro sistemas (ordem de rastreamento β = 4) compostos pelas derivadas dos sinais de sa´ıda de uma maneira similar `a forma mostrada nas equa¸c˜oes 2.20 e 2.21. A constru¸c˜ao do primeiro sistema ´e obtida derivando-se o sinal de sa´ıda y em rela¸c˜ao ao tempo.
Sistema 1
z1 = ˆz1 = ˙y= ⎡
⎣ Ψ(1)f
δ(1)
⎤
⎦=C1(x(t)) +D1u(t) = ⎡ ⎣ a3 ω ⎤ ⎦ onde
C1 = ˆC1 = ⎡
⎣
a3
ω
⎤
⎦ D1 = ⎡ ⎣ 0 0 0 0 ⎤ ⎦ e
R0(x) =R0 =I(2×2) (matriz identidade de ordem 2)
r1 = 0
K1(x) = K1 =J1 = ⎡ ⎣ 1 0 0 1 ⎤ ⎦
Para o segundo sistema, deriva-se o sinal z1 em rela¸c˜ao ao tempo.
Sistema 2
z2 = ⎡ ⎣ ¯ z2 ˆ z2 ⎤ ⎦= ⎡ ⎣ Ψ(2)f
δ(2)
⎤
⎦=C2(x(t)) +D2u(t) =
= ⎡ ⎣ ˙ a3 ˙ ω ⎤ ⎦= ⎡ ⎣
−p5ωsinδ−p6a3+p7a4+ (p7ke)Te−1
a2
⎤
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 21
onde
C2 = ⎡ ⎣ ¯ C2 ˆ C2 ⎤ ⎦= ⎡ ⎣
−p5ωsinδ−p6a3+p7a4
a2
⎤
⎦ (2.22)
D2 = ⎡
⎣
(p7ke)Te−1 0
0 0
⎤
⎦
e
R1(x) =R1 =I(2×2)
r2 = 1
K2(x) = K2 = ⎡ ⎣ H2 J2 ⎤ ⎦= ⎡ ⎣
0 0 1 0 0 0 0 1
⎤
⎦
Nota-se que para o fluxo de campo Ψf, o objetivo do algoritmo de invers˜ao foi
al-can¸cado, logo, n˜ao ´e mais necess´aria a deriva¸c˜ao dos termos correspondentes ao fluxo de campo. Para o terceiro sistema, deriva-se o sinal ˆz2 em rela¸c˜ao ao tempo.
Sistema 3
z3 = ⎡ ⎣ ¯ z3 ˆ z3 ⎤ ⎦= ⎡ ⎣ Ψ(2)f
δ(3) ⎤
⎦=C3(x(t)) +D3u(t) =
= ⎡ ⎣ ˙ a3 ˙ a2 ⎤ ⎦= ⎡ ⎣
−p5ωsinδ−p6a3+p7a4+ (p7ke)T −1 e
2p1ωcos 2δ−p2a2−p3(a3sinδ+ωΨf cosδ) +p4a5 ⎤
⎦
onde
C3 = ⎡ ⎣ ¯ C3 ˆ C3 ⎤ ⎦= ⎡ ⎣ ¯ C2
2p1ωcos 2δ−p2a2−p3(a3sinδ+ωΨfcosδ) +p4a5 ⎤
⎦ (2.23)
D3 =D2 e
R2(x) =R2 =I(2×2)
r3 = 1
K3(x) =K3 = ⎡ ⎣ H3 J3 ⎤ ⎦= ⎡ ⎣
0 0 1 0 0 0 0 0 0 0 0 1
⎤
⎦
Sistema 4
z4 = ¯z4 = ⎡
⎣ Ψ(2)f
δ(4)
⎤
⎦=C4(x(t)) +D4u(t) = ⎡ ⎣ ˙ a3 ˙ˆ C3 ⎤ ⎦ onde
C4 = ¯C4 = ⎡ ⎣ ¯ C2 ˜ C4 ⎤ ⎦ (2.24) ˜
C4(x) = 2p1(a2cos 2δ−2ω2sin 2δ)−p2Cˆ3 −p3 ¯
C2−Ψfω2
sinδ+ + (2ωa3+ Ψfa2) cosδ] +p4(−a5+a6)T
−1 t
(2.25)
D4 = ⎡
⎣
p7keT −1
e 0
−p3p7kesinδTe−1 p4(TtTg) −1
⎤
⎦ (2.26)
e
R3(x) = R3 =I(2×2)
r4 = 2
K4(x) = K4 =H4 = ⎡
⎣
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 1
⎤
⎦ (2.27)
Nota-se queD∗
4 =D
−1
4 , e
D−1
4 = ⎡
⎣
Te(p7ke) −1
0
p3p
−1
4 TtTgsinδ p −1
4 TtTg
⎤
⎦ (2.28)
Como o sistema 4 possui ordem de rastreamento β = 4 e sua sa´ıda ´e dependente implicitamente da entradauT = ue ug
, ent˜ao o sistema ˆ
A(ˆx) =A(ˆx)−B(ˆx)D∗
4(ˆx)C4(ˆx) ˆ
B(ˆx) =B(ˆx)D∗
4(ˆx)H4(ˆx) ˆ
C(ˆx) =−D∗
4(ˆx)C4(ˆx) ˆ
D(ˆx) =D∗
4(ˆx)H4(ˆx)
D∗
4(ˆx) =DT4
D4DT4 −1
(2.29)
atua como sistema inverso `a direita do sistema 2.5. ´E importante destacar que o vetor de tens˜aou ´e obtido a partir do vetor de sa´ıda ˆy do sistema inverso.
Cap´ıtulo 2. Modelo Desacoplado do Gerador S´ıncrono 23
adaptativo robusto que, mesmo na presen¸ca de incertezas param´etricas e dinˆamicas n˜ao modeladas (Apˆendice C), deve levar as sa´ıdas do gerador s´ıncrono ao seu estado de equil´ıbriox∗
= (Ψ∗ f, δ
∗
)T.
As sa´ıdas do sistema inverso `a direita (e, consequentemente, as entradas do gerador s´ıncrono) seguem
u= ⎡
⎣
ue
ug
⎤
⎦= ⎡
⎢ ⎢ ⎢ ⎣
Te
−C¯2(ˆx) +u1(t)
(p7ke) −1
p3TtTgsin
ˆ
δ−C¯2(ˆx) +u1(t)
p−1
4 + +TtTg
−C˜4(ˆx) +u2(t)
p−1
4 ⎤
⎥ ⎥ ⎥ ⎦
(2.30)
Controlador Adaptativo Robusto
3.1
Introdu¸
c˜
ao
3.1.1
Sistemas de Controle
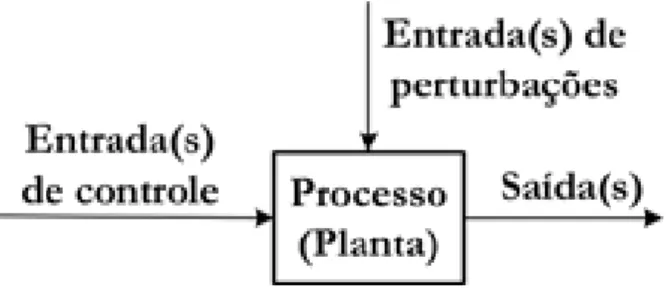
Um sistema a ser controlado pode ser representado, de forma simplificada, conforme a Figura 3.1
Figura 3.1: Sistema de Controle.
O sistema a ser controlado ´e chamado de processo ou planta (Apˆendice A). O sinal aplicado na(s) entrada(s) de controleu´e chamado sinal de controle, e tamb´em ´e conhecido como vari´avel manipulada. O sinal de sa´ıda do processoy´e chamado de vari´avel contro-lada ou vari´avel de processo, e ´e a vari´avel cujo comportamento se deseja controlar. Al´em disso, o sistema est´a, em geral, sujeito `a a¸c˜ao de sinais ex´ogenos chamados de perturba¸c˜oes (Apˆendice C), que s˜ao sinais de entrada cujos valores n˜ao podem ser manipulados [63].
reali-Cap´ıtulo 3. Controlador Adaptativo Robusto 25
mentado para compara¸c˜ao com o sinal de entrada. No controle em malha fechada, o sinal de erro atuante, que ´e a diferen¸ca entre o sinal de entrada e o sinal realimentado (que pode ser o pr´oprio sinal de sa´ıda ou uma fun¸c˜ao do sinal de sa´ıda e suas derivadas), ´e introduzido no controlador de modo a reduzir o erro e trazer a sa´ıda do sistema a um valor desejado. As desvantagens dos sistemas a malha aberta, especificamente a sensibi-lidade a perturba¸c˜oes e a incapacidade de corrigir os efeitos destas perturba¸c˜oes, podem ser superadas no sistema a malha fechada.
O controlador ´e um dispositivo que realiza determinadas opera¸c˜oes matem´aticas sobre o sinal de erro a fim de produzir uma a¸c˜ao de controle que, ao ser aplicado ao processo, faz com que sejam satisfeitos determinados objetivos de desempenho do sistema de controle. A estas a¸c˜oes matem´aticas d´a-se o nome de a¸c˜oes de controle [63].
O c´alculo do sinal de controle pode ser realizado baseado somente na sa´ıda, ou nas vari´aveis de estado do sistema. Nesta disserta¸c˜ao ´e suposto que ´e mensurado apenas a sa´ıda do sistemay. A forma de calcular as a¸c˜oes de controle depende da teoria de controle utilizada.
3.1.2
Controle Cl´
assico
Dentro da teoria de controle cl´assico, a a¸c˜ao de controle pode ser calculada de diversas formas. As principais formas s˜ao: atrav´es da combina¸c˜ao da a¸c˜ao proporcional, integral e derivativa (PID) [70], do posicionamento de p´olos, de um compensador em atraso, em avan¸co e da realimenta¸c˜ao de estados.
Estes controladores possuem uma estrutura fixa, ou seja, seus parˆametros s˜ao est´aticos no tempo, s˜ao sintonizados para um ponto ou uma regi˜ao de opera¸c˜ao de um processo e essa sintonia n˜ao ´e modificada automaticamente caso seja necess´ario. Assim, a modelagem do processo ´e uma etapa importante para uma boa sintonia do controlador.
configura¸c˜oes utilizadas s˜ao: P, PD, PI e PID, sendo admiss´ıvel utilizar as a¸c˜oes separadas em uma malha ou em diferentes malhas do sistema.
O sinal de controle, em um controlador PID, ´e calculado em fun¸c˜ao do sinal de erro, e a estrutura, em diagrama de blocos, mais utilizada, pode ser vista na Figura 3.2.
Figura 3.2: Controlador PID.
Nas usinas geradoras de energia, para o controle de tens˜ao e freq¨uˆencia dos geradores s´ıncronos s˜ao usados controladores PID. Mais precisamente, para a malha da excitatriz ´e utilizado um PI e para a malha do regulador de velocidade, um PID com uma parte derivativa bem pequena. Estes controladores s˜ao ajustados atrav´es de modelos lineariza-dos e parˆametros fornecilineariza-dos pelo fabricante. Devido aos motivos expostos acima, pode ser notado que este tipo de controle pode n˜ao ser a melhor alternativa. Nesta disserta¸c˜ao, um controlador adaptativo robusto ´e proposto em substitui¸c˜ao ao PID cl´assico.
3.1.3
Controle Adaptativo
O projeto de um controlador, na maioria dos casos, depende do modelo da planta em uma determinada condi¸c˜ao de opera¸c˜ao. Por´em, a modelagem pode apresentar grande dificuldade, al´em de, em diversos processos, alguns parˆametros da planta serem desco-nhecidos ou parcialmente codesco-nhecidos (codesco-nhecidos com incertezas). Assim, surgiu a neces-sidade de t´ecnicas de estima¸c˜ao desses parˆametros com o intuito de melhor entender o comportamento da planta.
Cap´ıtulo 3. Controlador Adaptativo Robusto 27
linear e conceitualmente variante no tempo [4].
O final dos anos 70 marcou significativamente o progresso da teoria do controle adap-tativo, em termos de obten¸c˜ao de provas de estabilidade assint´otica global (Apˆendice B) e unifica¸c˜ao dos diversos algoritmos adaptativos ([23], [24] e [25]). Todas as provas de estabilidade elaboradas, nesta ´epoca, tˆem em comum uma hip´otese bastante restritiva. A hip´otese assume que o grau relativo n∗
do sistema, que ´e a diferen¸ca entre o grau do denominador e do numerador, ´e conhecido, al´em da necessidade de excita¸c˜ao rica em freq¨uˆencias. Apesar da existˆencia de provas de estabilidade para os sistemas de controle adaptativo, em [23] e [29] foi mostrado que v´arios algoritmos podem tornar-se inst´aveis quando algumas suposi¸c˜oes requeridas pela prova de estabilidade n˜ao s˜ao satisfeitas [6].
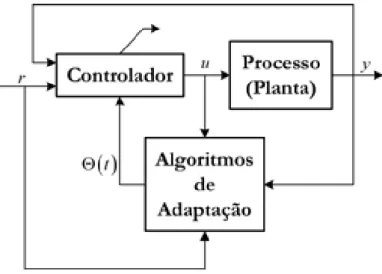
Uma estrutura de controle adaptativo, em geral, cont´em uma malha de realimenta¸c˜ao, um estimador de parˆametros e um controlador com ganhos ajust´aveis, como mostra a Figura 3.3.
Figura 3.3: Estrutura de um Controlador Adaptativo.
A estima¸c˜ao de parˆametros pode ser feita off-line, ou seja, ap´os um certo tempo os parˆametros s˜ao estimados atrav´es do processamento dos dados armazenados, ou a es-tima¸c˜ao pode ser feita on-line, onde periodicamente os parˆametros s˜ao atualizados com base em estimativas anteriores e novos dados e, assim, esta estima¸c˜ao ´e executada con-correntemente com o sistema de controle.
da entrada e da sa´ıda da planta, e usar este modelo para projetar um controlador [5]. A estrutura de controle adaptativo ´e classificada em indireta e direta. No controle adaptativo indireto (tamb´em chamado de controle adaptativo expl´ıcito) os parˆametros da planta s˜ao estimadoson-line e usados para calcular os parˆametros do controlador. No con-trole adaptativo direto, o modelo da planta ´e parametrizado em termos dos parˆametros do controlador, os quais s˜ao estimados diretamente sem c´alculos intermedi´arios envol-vendo estimativas dos parˆametros da planta. ´E tamb´em chamado de controle adaptativo impl´ıcito por ser baseado na estima¸c˜ao de um modelo impl´ıcito da planta [4]. Em ambas as estruturas, os c´alculos dos parˆametros do controlador s˜ao feitos por leis de adapta¸c˜ao. As principais t´ecnicas de controle adaptativo s˜ao: PID adaptativo, Controlador Adap-tativo por Modelo de Referˆencia (MRAC - Model Reference Adaptive Controller), Con-trolador Adaptativo por Posicionamento de P´olos (APPC - Adaptive Pole Position Con-troller), Controlador Adaptativo Auto Oscilat´orio e Controlador com Ganhos Ajust´aveis (Gain Scheduling) ([4], [5] e [41]).
Devido `a exigˆencia de parˆametros exatos para a aplica¸c˜ao da teoria de desacoplamento para sistemas n˜ao lineares, faz-se necess´aria a aplica¸c˜ao de controladores adaptativos robustos ao modelo desacoplado do gerador s´ıncrono. O primeiro subsistema ´e referente ao fluxo de campo e seu modelo ´e de grau relativo 2. O segundo subsistema ´e referente ao ˆangulo de carga e seu modelo ´e de grau relativo 4. Ent˜ao, podem ser usados modelos e controladores diferentes, para cada subsistema do gerador s´ıncrono.
3.2
Controle Adaptativo por Modelo de Referˆ
encia
O MRAC convencional usa leis integrais de adapta¸c˜ao e a sa´ıda da planta segue um modelo de referˆencia especificado [4]. O erroe0 entre a sa´ıda da planta e a sa´ıda do mo-delo de referˆencia ´e utilizado por um algoritmo de adapta¸c˜ao para ajustar os parˆametros do controlador. Assim, a dinˆamica da planta ´e for¸cada a seguir a dinˆamica do modelo. O algoritmo convencional apresenta problemas de estabilidade sob condi¸c˜oes n˜ao ideais e mesmo com as modifica¸c˜oes para aumentar a robustez (Apˆendice C) do algoritmo con-vencional [4], em geral o transit´orio ´e lento e oscilat´orio.
Cap´ıtulo 3. Controlador Adaptativo Robusto 29
Control). No MRC, um bom conhecimento da planta e dos parˆametros de desempenho fornecem ao projetista as ferramentas necess´arias para se obter o modelo, chamado de modelo de referˆencia, que descreve as propriedades de entrada/sa´ıda requeridas da planta em malha fechada. O objetivo do MRC ´e obter a lei de controle que modifica a estrutura e a dinˆamica da planta para que suas propriedades de entrada/sa´ıda sejam exatamente como as do modelo de referˆencia. A fun¸c˜ao de transferˆenciaM(s) do modelo de referˆencia ´e escolhida para que um dado sinal de entrada r(t) leve sua sa´ıda ym(t) a apresentar a
resposta desejada da sa´ıda da planta y(t).
O controlador ´e escolhido tal que seus sinais sejam uniformemente limitados e a sa´ıda da fun¸c˜ao de transferˆencia (Apˆendice A) da planta em malha fechada siga a sa´ıda do modelo de referˆencia. Essa condi¸c˜ao de igualdade garante que para uma dada referˆencia, o erro de sa´ıda, que representa a diferen¸ca entre o sinal de sa´ıda da planta e a sa´ıda do modelo, convirja `a zero. A condi¸c˜ao de igualdade entre as fun¸c˜oes de transferˆencia do modelo de referˆencia e do sistema em malha fechada ´e conseguida atrav´es do cancelamento de zeros da fun¸c˜ao transferˆencia da planta e substitui¸c˜ao dos mesmos por aqueles presentes no modelo. O cancelamento dos zeros da planta, ent˜ao, faz com que a planta seja de fase n˜ao m´ınima (Apˆendice A). Se algum zero da planta estiver no semiplano direito, seu cancelamento pode levar a sinais n˜ao limitados.
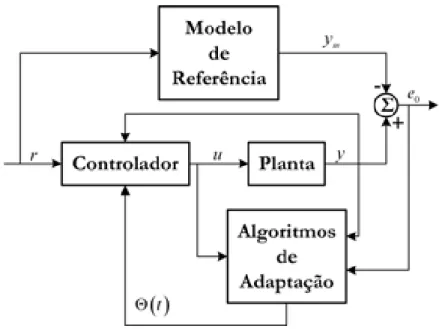
O projeto do controlador requer o conhecimento dos coeficientes da fun¸c˜ao de trans-ferˆencia da planta. Quando esses coeficientes s˜ao desconhecidos, ou conhecidos com in-certezas, o MRC n˜ao pode ser implementado. Uma maneira de tratar com o caso dos parˆametros desconhecidos ´e usar m´etodos de estima¸c˜ao de parˆametros que substituam os parˆametros desconhecidos na lei de controle, obtidos pelo m´etodo direto ou indireto. Tem-se, ent˜ao, o MRAC (Figura 3.4).
Figura 3.4: MRAC direto.
s˜ao ajustados atrav´es do erro entre a sa´ıda da planta e a sa´ıda do modelo de referˆencia. Considere uma planta linear, monovari´avel, com incertezas param´etricas e invariante no tempo com fun¸c˜ao de transferˆencia
G(s) =kp
np(s)
dp(s)
(3.1) sendo u o sinal de entrada e y o sinal de sa´ıda. Considere, tamb´em, um modelo de referˆencia, que possui r como sinal de entrada e ym como sinal de sa´ıda
M(s) =km
nm(s)
dm(s)
(3.2) O objetivo ´e encontrar uma lei de controle u(t) para que o erro de sa´ıda e0
e0 =y−ym
tenda para zero assintoticamente, para condi¸c˜oes iniciais quaisquer e sinais de referˆencia
r(t) cont´ınuos por partes e uniformemente limitados. As seguintes hip´oteses s˜ao assumidas:
a. np(s) edp(s) s˜ao polinˆomios mˆonicos (Apˆendice A) de grau [dp(s)] = ne grau [np(s)] =
m;
b. nm(s) edm(s) s˜ao polinˆomios mˆonicos de mesmo grau relativo que a planta (em geral,
Cap´ıtulo 3. Controlador Adaptativo Robusto 31
c. A planta deve ser control´avel e observ´avel, ou seja,np(s) edp(s) s˜ao coprimos (Apˆendice
A);
d. kp e km (ganhos de alta freq¨uˆencia) com o mesmo sinal. Em geral,kp >0 e km >0;
e. A planta ´e de fase m´ınima;
f. Somente a entrada e a sa´ıda da planta s˜ao mensur´aveis.
Como o n´umero de parˆametros da planta ´e igual a 2n, e os sinais dispon´ıveis s˜ao r
e y, s˜ao necess´arios 2n−2 sinais adicionais para gerar o sinal de controle u. Utiliza-se, ent˜ao, sinais filtrados da entrada e sa´ıda, como segue
⎧ ⎨
⎩ ˙
v1 = Λv1+gu, v1 ∈ ℜn−1 ˙
v2 = Λv2+gy, v2 ∈ ℜn−1
(3.3)
onde Λ ´e escolhido tal quenm(s) seja um fator de det (sI−Λ). O vetor regresor ´e definido
como ω= ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ v1 y v2 r ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦
e o sinal de controleu
u= ΘTω
onde
Θ(t) = ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
Θv1 Θn
Θv2 Θ2n ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦
´e o vetor de parˆametros adaptativos [41].
Baseado nas hip´oteses anteriores, segundo [4], existe um ´unico vetor constante Θ∗
tal que a fun¸c˜ao de transferˆencia da planta em malha fechada (comu= Θ∗Tω)) se comporte
exatamente como o modelo de referˆencia M(s) (condi¸c˜ao de matching). Obviamente Θ∗
somente pode ser conhecido se a planta for conhecida, o que ´e bastante dif´ıcil na pr´atica. Quando isto n˜ao ´e o caso, Θ(t) ´e adaptado at´e que e0(t)→ 0 quando t → ∞ e, eventualmente sob alguma condi¸c˜ao de riqueza de sinal, Θ(t)→Θ∗
Seja A b hT uma realiza¸c˜ao m´ınima da planta, e x ∈ ℜn o respectivo vetor de
estado. Ent˜ao, a planta com os filtros podem ser representados como ⎧
⎨
⎩ ˙
xc =A0xc+b0u
y=hT cxc
(3.4)
onde
xc =
⎡ ⎢ ⎢ ⎢ ⎣ x v1 v2 ⎤ ⎥ ⎥ ⎥ ⎦
, xc ∈ ℜ3n−2, A0 = ⎡
⎢ ⎢ ⎢ ⎣
A 0 0
0 Λ 0
ghT 0 Λ
⎤
⎥ ⎥ ⎥ ⎦
, b0 = ⎡ ⎢ ⎢ ⎢ ⎣ b g 0 ⎤ ⎥ ⎥ ⎥ ⎦
, hT c =
hT 0 0
Nota-se queω = Λxc+brr com
Λ = ⎡ ⎣ Λc 0 ⎤
⎦ Λc =
⎡
⎢ ⎢ ⎢ ⎣
0 I 0
hT 0 0 0 0 I
⎤
⎥ ⎥ ⎥ ⎦
br =
⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ 0 0 0 1 ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ Tem-se, ent˜ao, ⎧ ⎪ ⎨ ⎪ ⎩ ˙
xc =Acxc+
bc
Θ∗
2n
u−Θ∗Tω +bcr
y=hT cxc
(3.5)
onde Ac = A0 +b0Θ∗rTΛc, Θ ∗T
r =
Θ∗
1 . . . Θ
∗
2n−1
, xc ∈ ℜ3n −2
, bc = Θ ∗
2nb0 e Θ∗2n =
km
kp
>0.
Ac bc hTc
´e uma realiza¸c˜ao n˜ao m´ınima e est´avel de M(s) [6], ou seja, o modelo de referˆencia pode ser representado como
⎧ ⎨
⎩ ˙
xcm=Acxcm+bcr, xcm∈ ℜ3n−2
ym =hTcxcm
(3.6)
Definindo o vetor de erro por e=xm−xcm, tem-se a seguinte equa¸c˜ao do erro
⎧ ⎪ ⎨ ⎪ ⎩ ˙
ecm=Ace+
bc
Θ∗
2n
u−Θ∗Tω
e0 =hTce
(3.7)
e, na forma entrada/saida
e0 = 1 Θ∗
2n
M
u−Θ∗Tω
Cap´ıtulo 3. Controlador Adaptativo Robusto 33
Considere um polinˆomio L(s) de grau N = n∗
− 1, de forma que M(s)L(s) seja Estritamente Real Positivo (ERP). Seja um sinal auxiliar, interpretado como predi¸c˜ao do erro e0 [64],
ya =M LΘ2n+1
L−1
u−ΘTL−1
ω
(3.9) onde Θ2n+1 e Θ s˜ao estimativas para Θ∗2n
−1
e Θ∗
(parˆametros de matching), respectiva-mente. O erro aumentado ´e definido como
ea= (y−ym)−ya=e0−ya (3.10)
Em [65] foi proposta uma modifica¸c˜ao em ya, com a inten¸c˜ao de tornar o sistema
adaptativo globalmente est´avel. Tem-se, ent˜ao,
ya=M L
Θ2n+1
L−1
ΘT −ΘTL−1
ω+αea
L−1
ωT
L−1
ω
, α >0 (3.11) As seguintes leis integrais de adapta¸c˜ao s˜ao utilizadas para atualizar Θ(t) e Θ2n+1(t)
˙
Θ =−ea
L−1
ω
(3.12) ˙
Θ2n+1 =ea
L−1
ΘT −ΘTL−1
ω (3.13)
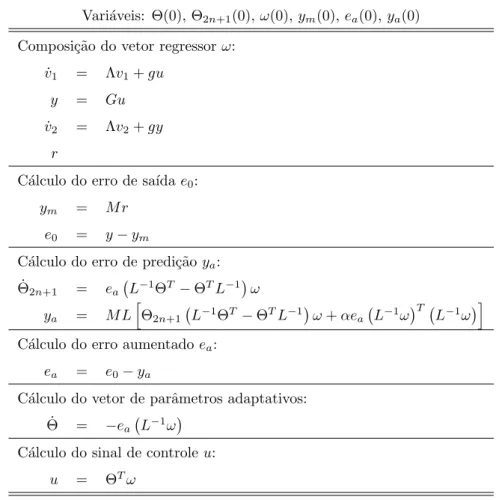
A Tabela 3.1 resume o algoritmo de um controlador MRAC convencional.
O algoritmo MRAC para ser globalmente est´avel (Apˆendice B) na presen¸ca de per-turba¸c˜oes necessita da introdu¸c˜ao de normaliza¸c˜ao, o que pode levar os transit´orios de adapta¸c˜ao a serem demasiadamente lentos. Mesmo com a excita¸c˜ao rica em freq¨uˆencias, a qualidade do transit´orio de adapta¸c˜ao (quando Θ est´a distante de Θ∗
) n˜ao ´e uniforme e a convergˆencia dos parˆamentros adaptativos ´e muito lenta. Apesar do comportamento transit´orio n˜ao ser totalmente aceit´avel, em algumas situa¸c˜oes, o sinal de controle ´e suave, tornando-o adequado para a condi¸c˜ao de regime permanente.
3.3
Sistemas com Estrutura Vari´
avel
Tabela 3.1: Algoritmo do controlador MRAC convencional.
Inicializa¸c˜ao de vari´aveis:
Constantes: g, Λ,α
Vari´aveis: Θ(0), Θ2n+1(0), ω(0), ym(0),ea(0),ya(0)
Composi¸c˜ao do vetor regressorω: ˙
v1 = Λv1+gu
y = Gu ˙
v2 = Λv2+gy
r
C´alculo do erro de sa´ıda e0:
ym = M r
e0 = y−ym
C´alculo do erro de predi¸c˜aoya:
˙
Θ2n+1 = ea
L−1ΘT −ΘT
L−1
ω ya = M L
Θ2n+1
L−1ΘT −ΘTL−1
ω+αea
L−1ωT
L−1ω
C´alculo do erro aumentado ea:
ea = e0−ya
C´alculo do vetor de parˆametros adaptativos: ˙
Θ = −eaL−1ω
C´alculo do sinal de controle u: u = ΘTω
e manter-se na superf´ıcie de deslizamento, tornando-se, ent˜ao, insens´ıveis `as incertezas da planta.
As principais caracter´ısticas de um controle adaptativo com estrutura vari´avel s˜ao a rapidez no transit´orio e a robustez a varia¸c˜oes param´etricas e perturba¸c˜oes, dentro de uma certa faixa de tolerˆancia. Contudo, tem tamb´em como caracter´ıstica, um chaveamento em alta freq¨uˆencia no sinal de controle e, ou em vari´aveis onde este m´etodo ´e aplicado, fenˆomeno conhecido como chattering.
Cap´ıtulo 3. Controlador Adaptativo Robusto 35
3.3.1
Descri¸
c˜
ao Geral
Para as demonstra¸c˜oes ser´a considerado o seguinte sistema de segunda ordem ⎧
⎨
⎩ ˙
x1 =x2 ˙
x2 =a1x1+a2x2+u
(3.14)
com a1 ea2 conhecidos com incertezas.
Define-se uma superf´ıcie de chaveamento s como
s=
x∈R2 |s(x) = cx1+x2 = 0, c >0
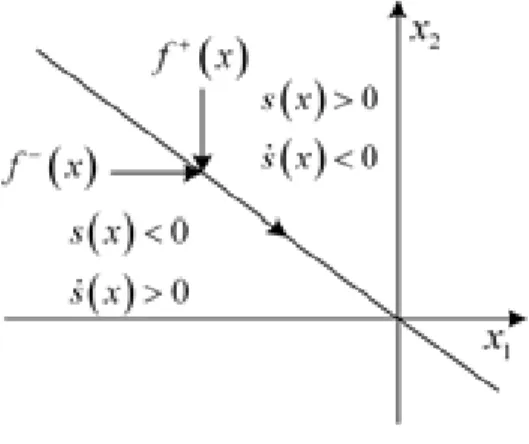
(3.15) na qual deseja-se que permane¸cam as vari´aveis de estado x1 e x2 (dinˆamica do sistema). Deve ser satisfeita a condi¸c˜ao ss <˙ 0 para se ter o comportamento ilustrado na Figura 3.5.
Figura 3.5: Superf´ıcie de deslizamento em um sistema com estrutura vari´avel.
Em um problema de estabiliza¸c˜ao deve-se ter: lim
t→∞x1(t) = 0 e limt→∞x2(t) = 0.
Utiliza-seu(x) = Θ1x1+ Θ2x2 de forma que
u(x) = ⎧ ⎨
⎩
u+(x), se s(x)>0
u−
(x), se s(x)<0 (3.16) Obt´em-se a convergencia das trajet´orias para s(x) = 0 com
Θ1 =−Θ1sgn (¯ sx1), Θ1¯ >|a1| Θ2 =−Θ2sgn (¯ sx2), Θ2¯ >|c+a2|
(3.17)