D
ESENVOLVIMENTO DE
T
ECNOLOGIA
PARA
P
RODUÇÃO DE
E
NERGIA A
P
ARTIR DO
M
OVIMENTO DE
P
LATAFORMAS
F
LUTUANTES
O
FFSHORE
M
ULTIFUNCIONAIS
G
ONÇALOM
ESQUITAG
UIMARÃESO
LIVEIRAB
RAGADissertação submetida para satisfação parcial dos requisitos do grau de MESTRE EM ENGENHARIA CIVIL — ESPECIALIZAÇÃO EM HIDRÁULICA
Professor Doutor Paulo Rosa Santos
Professor Doutor Francisco Taveira Pinto
Tel. +351-22-508 1901 Fax +351-22-508 1446
miec@fe.up.pt
Editado por
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Rua Dr. Roberto Frias
4200-465 PORTO Portugal Tel. +351-22-508 1400 Fax +351-22-508 1440 feup@fe.up.pt http://www.fe.up.pt
Reproduções parciais deste documento serão autorizadas na condição que seja mencionado o Autor e feita referência a Mestrado Integrado em Engenharia Civil - 2014/2015 - Departamento de Engenharia Civil, Faculdade de Engenharia da Universidade do Porto, Porto, Portugal, 2015.
As opiniões e informações incluídas neste documento representam unicamente o ponto de vista do respetivo Autor, não podendo o Editor aceitar qualquer responsabilidade legal ou outra em relação a erros ou omissões que possam existir.
Este documento foi produzido a partir de versão eletrónica fornecida pelo respetivo Autor.
A Ela
Aprende a observar. Perceba que tudo está interligado com tudo o resto. Leonardo Da Vinci
AGRADECIMENTOS
É com enorme alegria e sinceridade que deixo uma mensagem de gratidão às pessoas cuja ajuda, apoio e motivação foram imprescindíveis na a execução do presente trabalho. Apesar de não poder referenciar toda a gente, atribuo um especial reconhecimento:
-Ao Sr. Professor Doutor Paulo Rosa Santos, venero a toda a sabedoria e valores que me foi transmitindo não só no período decorrente da realização do presente trabalho, mas também durante o período de leccionamento das algumas unidades curriculares, inspirando-me continuamente a fazer mais e melhor. Agradeço a sua ociosidade para me orientar no desenvolvimento desta dissertação, tendo dado um apoio essencial para conseguir ultrapassar os desafios que foram surgindo.
-Ao Sr. Professor Doutor Francisco Taveira Pinto, por ter coorientado a minha dissertação e ter demonstrado disponibilidade para me guiar no percurso deste trabalho.
-A ela, porque sem a sua presença e dedicação o meu esforço não teria sido suficiente. São pessoas como ela que realmente dão sentido à minha vida, quer como pessoa quer como estudante e, por isso, estar-lhe-ei eternamente grato.
-Ao meu pai, por ser uma fonte de inspiração contínua e por me mostrar a importância do trabalho. Ensinou-se me valores que hoje se refletem na pessoa que sou. Sem o seu exemplo certamente não teria a garra, o empenho e o espírito de sacrifício presentes no meu dia-a-dia.
-Á minha mãe e aos meus irmãos, por sempre desejarem o maior dos sucessos na minha vida.
-Aos meus avós, por me terem ensinado e a superar sempre as espectativas e pela educação e carinho que me proporcionaram.
-Aos meus melhores amigos, por estarem presentes nos melhores e nos piores momentos e por cultivarem o meu espírito autocrítico.
-Aos pais da Mafalda, por me terem incluído na família como se fosse um filho e me mostrarem uma outra perspetiva da vida. Independentemente do futuro, ficarei para sempre grato pelas suas preocupações, conselhos e ensinamentos.
-Aos meus primos, por fomentarem a minha bem-disposição e me mostrarem que a vida é para ser encarada de cabeça levantada.
-Ao Daniel Clemente, por me ter ajudado e motivado na execução do presente trabalho, tendo mostrado disponibilidade imediata e fornecendo dados essenciais ao desenvolvimento do modelo numérico. Agradeço também as suas sugestões na resolução de problemas.
RESUMO
A presente dissertação pretende dar continuidade ao trabalho de desenvolvimento de um dispositivo para produção de energia elétrica a partir dos movimentos de plataformas flutuantes offshore ou, mais especificamente, que permita aproveitar a energia das oscilações de balanço dessas plataformas que resultam da ação da agitação marítima e do vento. Este trabalho foi iniciado por Clemente (2015) que, através do recurso à modelação física, estudou dois modelos do dispositivo, um à escala geométrica 1/40 e o outro à escala 1/75, no tanque de ondas do Laboratório de Hidráulica da Secção de Hidráulica Recursos Hídricos e Ambiente da FEUP. Nesta dissertação é realizado um estudo numérico recorrendo ao programa ANSYS Academic Research Offshore/Marine, mais conhecido como AQWA.
Numa primeira fase, foi realizado um trabalho de pesquisa da situação atual, tendo sido identificados e caracterizados alguns dispositivos de conversão da energia das ondas com um princípio de funcionamento semelhante ao do dispositivo em estudo e que apresentam a especificidade de ter o sistema de extração de energia, e demais componentes sensíveis, protegidos da agressividade do ambiente marítimo, dentro do casco da plataforma flutuante. Esta fase foi complementada com a realização de alguns tutoriais sobre o modelo numérico AQWA, para que se pudesse construir uma base de conhecimentos por forma a atingir o objetivo final desta dissertação com maior facilidade.
Posteriormente foram reavaliadas as características de um dos modelos físicos anteriormente testados (o modelo semicilíndrico, construído à escala 1/40) tendo em vista a correta definição de todos os parâmetros necessários à replicação do mesmo no modelo numérico. Por outro lado, os resultados experimentais existentes foram utilizados na calibração e na validação qualitativa dos resultados obtidos com o modelo numérico.
Após esse trabalho de validação, e com base nas conclusões resultantes dessa fase, o comportamento do dispositivo foi analisado com o modelo numérico fazendo variar de forma sistemática algumas das variáveis com mais influência no seu desempenho global. Isto permitiu que o estudo do dispositivo fosse aprofundado tendo em vista à sua otimização. Regra geral, as principais conclusões obtidas no estudo desenvolvido por Clemente (2015) foram confirmadas com o estudo numérico, i.e., verificou-se que o dispositivo em estudo apresenta maior potência absorvida para períodos de onda próximos do seu período natural de oscilação e que a um aumento de altura de onda incidente corresponde também um aumento dos valores da potência média extraída. Por outro lado, verificou-se que a potência média extraída era maior quando as ondas incidiam segundo a direção longitudinal da plataforma flutuante e que a melhor geometria para a secção transversal da plataforma era a retangular. Embora as últimas conclusões devam ser confirmadas em estudos posteriores, o presente trabalho representa mais uma etapa no desenvolvimento de uma tecnologia que permite explorar uma fonte de produção de energia limpa, abrindo novos caminhos a futuros desenvolvimentos.
Por fim, é apresentada uma revisão geral ao trabalho e dos objetivos alcançados, deixando-se também notas indicativas para a continuação dos trabalhos no futuro.
PALAVRAS-CHAVE:conversor de energia das ondas, modelação numérica, AQWA, otimização, energia renovável.
ABSTRACT
The present dissertation intends to resume the development of a device created with the goal of producing electric power from the motions of offshore floating platforms or, more specifically, that allows the usage of the energy from the platform’s roll oscillations which result from the action of sea waves and wind. This work was initiated by Clemente (2015) that, through the use of physical modeling, studied two models of the device, one on a geometric scale of 1/40 and the other on a scale of 1/75, in the wave tank of the Hydraulic Laboratory of the Hydraulics, Water Resources and Environment Division of FEUP. In this dissertation, the numerical study is carried out with ANSYS Academic Research Offshore/Marine numerical package, also known as AQWA.
Initially, a literature review was carried out aiming at the identification and characterization of devices based on operating principles similar to the one implemented in the device under development and that present the specificity of having the power-take-off system and all the sensitive components inside the hull of the floating platform, therefore protected from the rough marine environment. This phase was complemented with the execution of some AQWA tutorials, in order to improve knowledge on that numerical package having in mind the final goal of the dissertation.
Posteriorly, the characteristics of one of the physical models previously tested were reevaluated (the semicylindrical model, built at scale 1/40) owing to the proper definition of every parameter necessary to its replication in the numerical model. On the other hand, existing experimental results were used in the calibration and in the qualitative validation of the results obtained with the numerical model. After the validation work, and based on the conclusions that resulted from that phase, the behavior of the device was analyzed with the numerical model by varying systematically some of the variables with influence on its global performance. This allowed a deeper study of the device in order to attain optimization. In general, the main conclusions obtained in the study carried out by Clemente (2015) were confirmed in the numerical model study, namely it was observed that the device presents better performances (higher extracted power) for wave periods close to the roll natural period of oscillation and that an increase in the incident wave height leads also to an increase of the mean absorbed power. On the other hand, it was concluded that the mean extracted power is higher when the incident waves have the same direction of the longitudinal central axis of the floating platform, and that the best geometry for the cross section of the device is the rectangular one. Although the last conclusions need to be verified in upcoming studies, the present work represents one more step in the development of a technology that allows the exploitation of a source of clean energy, opening new paths to future works. At last, a general revision of the work carried out and attained goals is presented, together with some guiding notes for the continuation of the work in the future.
ÍNDICE GERAL AGRADECIMENTOS ... i RESUMO ...iii ABSTRACT ... v
1. INTRODUÇÃO
... 1 1.1. ENQUADRAMENTO GERAL ... 11.2. PERCURSO AINDA A DECORRER ... 4
1.3. ESTRUTURA ... 4
2.
CONTEXTUALIZAÇÃO
DOS
TRABALHOS
JÁ
DESENVOLVIDOS
... 7 2.1. INTRODUÇÃO ... 7 2.2. ISWEC ... 9 2.3. WITT ... 10 2.4. WELLO OY PENGUIN ... 12 2.5. DISPOSITIVO DA FRAUNHOFER ... 13 2.6. CONCLUSÕES ... 15 2.6.1.SITUAÇÃO... 15 2.6.2. ISWEC ... 15 2.6.3. WITT ... 15 2.6.4. WELLOOY PENGUIN ... 16 2.6.5. DISPOSITIVO DA FRAUNHOFER ... 163. CONCEITOS TEÓRICOS DE SUPORTE AO ESTUDO
.. 173.1. INTRODUÇÃO ... 17
3.2. GERAÇÃO E CARACTERIZAÇÃO DOS TIPOS DE ONDAS ... 17
3.2.1.INTRODUÇÃO ... 17
3.2.2.AGITAÇÃO MARÍTIMA ... 17
3.3. ONDAS REGULARES ... 18
3.3.1.INTRODUÇÃO ... 18
3.3.2.1.Parâmetros a Considerar ... 19
3.3.2.2.Potencial de Velocidades ... 20
3.3.2.3.Definição Matemática do Celeridade e do Comprimento de onda ... 21
3.3.2.4.Órbitas descritas pelas partículas ... 22
3.3.2.5.Energia de uma Onda Sinusoidal ... 23
3.3.3.ONDAS DE SEGUNDA ORDEM DE STOKES ... 24
3.4. ONDAS IRREGULARES ... 26
3.5. SEMELHANÇA HIDRÁULICA ... 30
3.5.1.INTRODUÇÃO ... 30
3.5.2.FATORES DE ESCALA ... 30
3.6. CÁLCULO DOS MOMENTOS DE INÉRCIA ... 33
3.6.1.INTRODUÇÃO ... 33
3.6.2. CENTRO DE GRAVIDADE ... 33
3.6.3. MOMENTO DE INÉRCIA BARICÊNTRICO ... 34
3.6.4. MOMENTO DE INÉRCIA AO CENTRO DE GRAVIDADE GLOBAL ... 35
3.6.5. MOMENTO DE INÉRCIA TOTAL E RAIO DE GIRAÇÃO ... 35
3.7. HIDROSTÁTICA ... 36
3.7.1.FLUTUAÇÃO DE CORPOS ... 36
3.7.2.METACENTRO E ALTURA METACÊNTRICA TRANSVERSAL ... 37
3.8. HIDRODINÂMICA ... 39
3.8.1.INTRODUÇÃO ... 39
3.8.2.INTERAÇÃO ONDA-CORPO ... 40
3.8.2.1.Introdução ... 40
3.8.2.2.Fenómenos de Radiação e de Difração ... 41
3.8.2.3.Corpo Flutuante – Analogia com um Sistema de um Grau de Liberdade ... 42
3.8.2.4.Análise no Domínio da Frequência vs. Análise no Domínio do Tempo ... 47
3.8.2.5.Análise no Domínio da Frequência ... 47
3.8.2.6.Análise no Domínio do Tempo ... 49
3.8.2.7.Funções de Resposta a Impulso ... 50
4. MODELAÇÃO NUMÉRICA
... 534.1. INTRODUÇÃO ... 53
4.2.1.ETAPAS DE APLICAÇÃO DE MODELOS NUMÉRICOS ... 54
4.2.2.INTERAÇÃO ONDAS-ESTRUTURA ... 54
4.3. ANSYS ACADEMIC RESEARCH OFFSHORE/MARINE... 55
4.3.1.INTRODUÇÃO ... 55
4.3.2.WORKBENCH ... 57
4.3.3.ANÁLISE NO DOMÍNIO DA FREQUÊNCIA ... 58
4.3.4.RESPOSTA HIDRODINÂMICA ... 58
4.4. CARACTERIZAÇÃO DO MODELO DO PROJETO ANTERIOR ... 59
4.4.1.INTRODUÇÃO ... 59
4.4.2.CARACTERÍSTICAS DA PLATAFORMA FLUTUANTE ... 59
4.5. DEFINIÇÃO DE PARÂMETROS DO MODELO NUMÉRICO ... 60
4.5.1.INTRODUÇÃO ... 60
4.5.2.GEOMETRIA ... 61
4.5.3.PROFUNDIDADE DE ÁGUA ... 61
4.5.4.REPRESENTAÇÃO DO SISTEMA DE EXTRAÇÃO DE ENERGIA ... 62
4.5.5.CABOS DE AMARRAÇÃO ... 63
4.5.6.DEFINIÇÃO DA DIMENSÃO DA MALHA ... 65
4.5.7.CONFIGURAÇÕES DA ANÁLISE NO DOMÍNIO DA FREQUÊNCIA ... 67
4.5.8.FREQUÊNCIAS DE ONDA ... 68
4.5.9.CONFIGURAÇÃO DA ANÁLISE NO DOMÍNIO DO TEMPO ... 70
4.5.10.ONDAS REGULARES ... 71
4.6. VALIDAÇÃO COM OS RESULTADOS EXPERIMENTAIS ... 73
4.6.1.INTRODUÇÃO ... 73
4.6.2.REPRODUÇÃO DAS CONDIÇÕES DE TESTE LABORATORIAL ... 73
4.6.3.ANÁLISE COMPARATIVA ENTRE MODELO FÍSICO E MODELO NUMÉRICO ... 74
4.7. ANÁLISE DAS VARIÁVEIS DO MODELO NUMÉRICO ... 77
4.7.1.INTRODUÇÃO ... 77 4.7.2.ALTURA DE ONDA ... 81 4.7.3.PERÍODO DE ONDA ... 82 4.7.4.TIPO DE AMARRAÇÃO ... 83 4.7.5.ÂNGULO DE INCIDÊNCIA... 84 4.7.6.CONFIGURAÇÃO GEOMÉTRICA ... 86
5. CONSIDERAÇÕES FINAIS E PROPOSTAS PARA
DESENVOLVIMENTO FUTURO
... 915.1. CONSIDERAÇÕES FINAIS ... 91
5.2. PROPOSTAS PARA DESENVOLVIMENTO FUTURO ... 92
REFERÊNCIAS BIBLIOGRÁFICAS ... 95
A1. CONDIÇÃO A)
... 99A2. CONDIÇÃO B)
... 101A3. CONDIÇÃO C)
... 105A4. CONDIÇÃO D)
... 109A5. DADOS AQWA
... 113A6. PARÂMETRO DA PROFUNDIDADE DE ÁGUA
... 115A7. FORMAS
... 119ÍNDICE DE FIGURAS
Figura 1.1 – Consumo energético mundial por regiões (Enerdata, 2015) ... 2
Figura 1.2 – Percentagem de eletricidade gerada por fontes renováveis (Eurostat, 2013) ... 2
Figura 1.3 – Evolução do número de inovações no ramo de energia extraída través da água nos últimos 5 anos (Thomson Reuters, 2016)... 3
Figura 1.4 – Evolução do número de inovações no ramo da água relacionada com a dinâmica dos oceanos nos últimos 5 anos (Thomson Reuters, 2016)... 3
Figura 2.1 – Princípio de funcionamento da PFOM ... 9
Figura 2.2 – Desenho conceptual do modelo ISWEC (Wave For Energy, 2015) ... 10
Figura 2.3 – Esquema dos movimentos que incitam funcionamento do WITT (Witt Limited, 2016) .... 11
Figura 2.4 – Esquema dispositivo WITT (Witt Limited, 2016) ... 11
Figura 2.5 – Interior do Wello Penguin (Wello Oy Company, 2016) ... 12
Figura 2.6 – Wello Penguin a converter energia das ondas em Orkney (Wello Oy Company, 2016) .. 13
Figura 2.7 – Sistema móvel de recolha da energia das ondas da Fraunhofer (Fraunhofer-Gesellschaft, 2016) ... 14
Figura 2.8 – Esquema representativo do funcionamento do dispositivo ... 14
Figura 3.1 – Zona de Geração (adaptação de CRES, 2012) ... 18
Figura 3.2 – Fases da agitação marítima (Veloso Gomes, 2014) ... 18
Figura 3.3 – Condições de aplicabilidade das teorias para ondas regulares (CEM, 2008) ... 19
Figura 3.4 – Convenções da onda sinusoidal (Veloso Gomes, 2015) ... 20
Figura 3.5 – Componentes das velocidades e acelerações das partículas da onda sinusoidal (Veloso Gomes, 2015) ... 23
Figura 3.6 – Representação do método de análise no domínio do tempo e da frequência (Veloso Gomes, 2015) ... 27
Figura 3.7 – Componentes sinusoidais da análise (Veloso Gomes, 2015) ... 27
Figura 3.8 – Espetro de energia de onda para a diversos registos de agitação (Veloso Gomes, 2015) ... 28
Figura 3.9 – Comparação dos espectros de JONSWAP e Pierson-Moskowitz (Veloso Gomes, 2015)29 Figura 3.10 – Componentes do dispositivo e referencial adotado ... 33
Figura 3.11 – Cálculo dos momentos de inércia e centros de gravidade dos elementos 1 e 2 (Efunda, 2016) ... 34
Figura 3.12 – Cálculo dos momentos de inércias dos elementos 3, 4, 5 e 6 (Pearson Education Inc., 2007) ... 35
Figura 3.14 – Relações geométricas numa circunferência (formulário HUAM, 2015) ... 37
Figura 3.15 – Momentos estabilizador e desestabilizador (Técnico de Lisboa, 2016) ... 38
Figura 3.16 – Metacentro e altura metacêntrica (Técnico de Lisboa, 2016) ... 38
Figura 3.17 – Situações possíveis de posicionamento do metacentro (Sheik, 2008) ... 39
Figura 3.18 – Seis graus de liberdade de um corpo flutuante (AQWA Theory Manual, 2015) ... 40
Figura 3.19 – Exploração do movimento de Balanço para produção de energia (Clemente, 2015) .... 41
Figura 3.20 – Decomposição do movimento de um corpo flutuante num problema de radiação e de difração. Representação para o movimento de arfagem (Perdigão, 2015) ... 41
Figura 3.21 – Sistema do tipo “massa-mola” com um grau de liberdade (adaptado de Chakrabarti, 1987) ... 43
Figura 3.22 – Representação de diferentes fatores de amortecimento em oscilações livres (Rosa Santos, 2010) ... 45
Figura 3.23 – Oscilações livres com amortecimento ξ<1 (Rosa Santos, 2010) ... 46
Figura 4.1 – Teoria inerente ao AQWA (AQWA Manual v.16.0, 2015)... 56
Figura 4.2 – Exemplo de interface Workbench Project Schematic ... 58
Figura 4.3 – Esquema da estrutura flutuante estudada ... 60
Figura 4.4 – Coeficientes a44 e b44 para diferentes profundidades de água ... 62
Figura 4.5 – Esquematização do cálculo do erro associado ao método de representação do movimento sobre a calha (a figura não está à escala) ... 63
Figura 4.6 – Amarração usada nos testes laboratoriais (Clemente, 2015) ... 64
Figura 4.7 – Esquematização do cálculo do raio de movimentação possível do dispositivo ... 65
Figura 4.8 – Representação em AQWA do PTO e dos cabos de amarração ... 65
Figura 4.9 – Definição da dimensão da malha ... 66
Figura 4.10 – Coeficientes de massa adicionada e de amortecimento para diferentes dimensões da malha usada em AQWA ... 67
Figura 4.11 – Erro que surge se não for ignorada a regra de violação de modelação ... 67
Figura 4.12 – Coeficientes de massa adicionada e de amortecimento para diferentes números de frequências calculadas ... 69
Figura 4.13 – Coeficientes de massa adicionada e de amortecimento com e sem frequências singulares (zoom dos gráficos nas frequências de onda da gama analisada) ... 70
Figura 4.14 – Exemplo de configuração da análise no domínio do tempo em AQWA ... 70
Figura 4.15 – Exemplo de um equilíbrio dinâmico da resposta de uma estrutura a uma onda incidente [Altura de onda 5 m, Período de onda 12 s, Ângulo de incidência 90º, Tipo de Amarração Real] ... 71
Figura 4.16 - Distribuição em frequência do período associado à altura de onda significativa para o conjunto de dados recolhidos pela estação ondógrafo de Leixões entre 1993 e 2007 (excluindo os anos de 1993, 1995 e 2001, com menos de 40% de registos válidos no Inverno), (Silva, Coelho, Veloso Gomas, Taveira Pinto, 2008) ... 72
Figura 4.17 - Distribuição em frequência da altura de onda significativa para o conjunto de dados recolhidos pela estação ondógrafo de Leixões entre 1993 e 2007 (excluindo os anos de 1993, 1995 e 2001, com menos de 40% de registos válidos no Inverno), (Silva, Coelho, Veloso Gomas, Taveira Pinto,
2008) ... 72
Figura 4.18 – Limites de aplicabilidade das teorias de ondas. Representação das condições de teste estudadas. ... 73
Figura 4.19a – Comparação dos comportamentos em modelo físico e modelo numérico... 74
Figura 4.19b – Comparação dos comportamentos em modelo físico e modelo numérico... 75
Figura 4.19c – Comparação dos comportamentos em modelo físico e modelo numérico ... 76
Figura 4.20 – Comparação das potências finais entre modelo físico e modelo numérico ... 77
Figura 4.21 – Exemplo de um teste em que a resposta está em fase estabilização inicial [Altura de Onda 0.5 m, Período de Onda 8 s, Ângulo de Incidência 90º, Amarração do tipo Imóvel] ... 79
Figura 4.22 – Exemplo de um teste em que os valores das potências aumentam devidos à rotação do dispositivo [Altura de Onda 2.5 m, Período de Onda 7.3 s, Ângulo de Incidência 90º, Sem Amarração] ... 80
Figura 4.23 – Potência média absorvida em função da altura de onda para diferentes períodos (valores à escala do modelo físico) ... 82
Figura 4.24 – Potência média absorvida em função do período de onda (valores no modelo) ... 82
Figura 4.25 – Influência do tipo de amarração na potência média absorvida em função da altura de onda e do tipo de amarração (valores à escala do modelo físico) ... 84
Figura 4.26 – Esquema de uma onda incidente com um ângulo de 90º ... 85
Figura 4.27 – Valores das potências para diferentes ângulos de ondas incidentes ... 85
Figura 4.28 – Características das quatro geometrias e seus perfis transversais ... 86
Figura 4.29 – Esquematização das geometrias testadas no presente trabalho ... 87
Figura 4.30 – Comparação da resposta da geometria 2, sujeita a ondas regulares, para os dois métodos de ajuste do período natural de oscilação de balanço ... 89
Figura 4.31 – Comparação da resposta da geometria 3, sujeitas a ondas regulares, ara os dois métodos de ajuste do período natural de oscilação de balanço ... 89
Figura 4.32 – Comparação das respostas das quatro geometrias ... 90
Figura 5.1 – Sintetização do desenvolvimento do estudo de um dispositivo do tipo WEC ... 94
Figura A6.1 – Coeficientes de Massa Adicionada e de Amortecimento para diferentes profundidades de água……….118
ÍNDICE DE TABELAS
Tabela 2.1 – Descrição dos tipos de WEC existentes (EMEC, 2016) ... 7
Tabela 3.1 – Fatores de escala decorrentes do critério de semelhança de Froude (Rosa Santos, 2010) ... 32
Tabela 4.1 – Características das condições testadas ... 60
Tabela 4.2 – Valores da potência média absorvida em função da altura de onda e do período (valores à escala do modelo físico) ... 81
Tabela 4.3 – Características físicas finais de cada geometria para um período natural de oscilação variando o raio de giração ... 87
Tabela 4.4 - Características físicas finais de cada geometria para um período natural de oscilação variando o centro de gravidade ... 88
Tabela A1.1 – Características da condição a)……… . …..99
Tabela A2.1 – Características da condição b)……… …..101
Tabela A3.1 – Características da condição c)……… ………..105
Tabela A4.1 – Características da condição c)……… …………..109
Tabela A5.1 – Dados AQWA……… ..………….113
Tabela A5.2 – Cálculo dos Períodos Naturais de Oscilação……….….114
Tabela A7.1 – Dados Formas………..119
Tabela A8.1 – Dados Validação……… ………….….121
SÍMBOLOS E ABREVIATURAS
Nesta secção é apresentada uma listagem dos principais símbolos utilizados na presente dissertação de mestrado. Devido ao elevado número de variáveis e parâmetros utilizados, queresulta das diversas matériasabordadas,emalgumassituações,omesmosímboloapresentamaisdoqueumsignificado.Na maiorpartedoscasos,ousodessessímbolosestálimitadoaapenasumúnicocapítulo,peloquedeverá ser fácil distinguir o seu significado a partir do contexto em que o símbolo é utilizado.
SÍMBOLOS, ACRÓNIMOS E ABREVIATURAS
a – Amplitude de onda [m]
a44 – Coeficiente de massa adicionada para as oscilações de balaço [kg.m2/rad] A – Amplitude de onda [m]
A – Constante espectral [-]
A44 – Coeficiente de massa adicionada para as oscilações de balanço [kg.m2/rad]
Akj – Matriz dos coeficientes de massa adicionada onde k e j representam os índice de 1 a 6 b44 – Coeficiente de amortecimento [N.m/(rad/s)]
B – Constante espectral [-] B – Centro de Impulsão [m]
B – Coeficiente de Amortecimento [N.m/(rad/s)] Bc – Coeficiente de amortecimento crítico [Ns/m] C – Celeridade da onda [m/s]
C0 – Celeridade da onda em profundidade infinita [m/s] Cm – Coeficiente de massa adicionada [-]
d – Profundidade de água [m] e – Número de Neper [-] E – Energia [J]
Ec – Energia cinética da onda [J] Ep – Energia potencial da onda [J] f – Frequência de onda [Hz]
fmin – Frequência mínima absoluta admitida em AQWA [Hz] F0 – amplitude da força externa [m]
Fa – Força de amortecimento no PTO [N]
Fk - Forças e momentos exteriores que atuam no corpo, segundo k [N, N.m] FKR – Forças de Radiação [N]
g – Aceleração da gravidade [m2/s] G – Centro de gravidade [-]
GMt – Altura metacêntrica transversal [m] H – Altura de onda [m]
Hs – Altura de onda significativa [m] I – Força de impulsão [N]
ixx – Raio de giração segundo x [m] iyy – Raio de giração segundo y [m] izz – Raio de giração segundo z [m]
Ix – Momento de inércia de massa segundo x [kg.m2] Iy – Momento de inércia de massa segundo y [kg.m2] Iz – Momento de inércia de massa segundo z [kg.m2]
IGt – Momento de inércia de massa baricêntrico total [kg.m2] k – Número de onda [-]
K – Rigidez da mola [N/m] l – Comprimento [m]
L – Comprimento de onda [m]
L0 – Comprimento de onda em profundidade infinita [m] m – Massa [kg]
m0 – Momento espectral de ordem 0 [m2] m2 – Momento de ordem 2 [m2] m4 – Momento de ordem 4 [m2] mn – Momento de ordem n [m2] M – Massa [kg] M – Posição do Metacentro [m] M – Momento [N.m] Ms – Momento estabilizador [N.m]
Nc – Número de cristas de onda do registo [-]
Nz – Número de vezes que o registo da agitação marítima cruza, no sentido ascendente, o nível médio da superfície livre da água [-]
P – Potência [W] R – Raio [m]
Rkj – Funções de resposta a impulso [-] S(f) – Função de densidade espectral [m2Hz-1]
t – Tempo [s]
T – Período de onda [s]
Tn – Período natural de oscilação [s]
Tr – Período natural da oscilação de balanço [s] u – Velocidade da partícula na direção horizontal [m/s] U – Velocidade de escoamento [m/s]
v – Velocidade da partícula na direção vertical [m/s] V – Volume [m3]
x – Posição horizontal de um ponto da onda [m] 𝑥̇ – Componente da velocidade das ondas[m/s] 𝑥̈ – Componente da aceleração das ondas [m2/s] z – Posição vertical de um ponto da onda [m] Z – Coordenada vertical de um ponto [m]
ZG – Coordenada vertical do centro de gravidade [m]
𝛽 – Número de Valensi [-] 𝜉 – Fator de amortecimento [-] 𝛾 – Peso volúmico [N/m3]
𝜀 – Parâmetro de largura da banda espectral [-] 𝜔 – Frequência angulas de onda [rad/s]
𝜔𝑛 – Frequência natural de balanço [rad/s]
𝜕 – Derivada [-] 𝜆 – Fator de escala [-] Σ – Somatório [-] ∇ - Gradiente [-]
𝜐 – Parâmetro da largura espectral [-] 𝜌 – Massa volúmica [Kg/m3]
𝜃 – Fase de uma onda [rad]
𝜃 – Equação linear para as oscilações de balanço [-] 𝜃0 – Ângulo inicial de balanço [º]
Ω – Função de resposta a impulso [-] 𝜏 – Tempo [s]
𝜂 – Rendimento [-]
𝜂 – Elevação da superfície livre [m]
AQWA – ANSYS Academic Research Offshore/Marine BIEM – Boundary Integral Equation Method
CEM – Coastal Engineering Manual CFD – Computational Fluid Dynamics CO2 – Dióxido de Carbono
DEC – Departamento de Engenharia Civil DC – Direct Current
EMEC – European Marine Energy Centre
FEUP – Faculdade de Engenharia da Universidade do Porto GPS – Global Positioning System
JONSWAP – Joint North Sea Wave Project
max - Máximo
M.I. – Momento de inércia p – Protótipo
PTO – Power Take-Off (Sistema de extração de energia) PFOM – Plataforma Flutuante Offshore Multifuncional PVC – Polyvinyl Chloride
QTF – Quadratic Transfer Function Re – Número de Reynolds
RX – Rotação segundo o eixo do X RY – Rotação segundo o eixo do Y RZ – Rotação segundo o eixo do Z
SHRHA – Secção de Hidráulica, Recursos Hídricos e Ambiente TLPS – Tension Leg Platforms
1
INTRODUÇÃO
1.1 ENQUADRAMENTO GERAL
A simples pergunta que se coloca quando é presenciada a força da mãe natureza é: “como é que ela funciona?”. Certo está que a resposta para essa pergunta não será tão simples, uma vez que se está a abordar um tema sobre algo que não é possível controlar.
A humanidade tentou sempre de alguma forma encontrar uma justificação para aquilo que ainda não era explicável, quer baseando-se em crenças, quer servindo-se dessa incerteza como motor para impulsionar o seu desenvolvimento intelectual e tecnológico para, um dia, fundamentar o conhecimento do desconhecido. O comportamento da mãe natureza sob forma dos oceanos não fugiu à regra.
Ao longo dos anos, o contínuo estudo dos fenómenos naturais, que resultaram, muitas das vezes, em acontecimentos trágicos, levou a que houvesse uma necessidade acrescida de prever certos estados de agitação marítima, como por exemplo as tempestades. A propósito desta necessidade desenvolveram-se métodos de estudo e análise de acontecimentos, por via estatística, que mais tarde seriam essenciais no desenvolvimento dos dispositivos que aproveitam as potencialidades que a dinâmica dos oceanos apresenta.
Atualmente, e com a crescente necessidade de redução dos agentes de poluição, têm surgido cada vez mais alternativas à produção de energia não renovável, algumas das quais envolvem o recurso à energia das ondas. Com base nos conhecimentos adquiridos ao longo dos anos e consequentes avanços tecnológicos, hoje já é possível conceber dispositivos para produção de energia renovável através da conversão do potencial energético das ondas marítimas em energia elétrica. No entanto, uma vez que o aproveitamento desse recurso energético ainda se encontra numa fase preliminar, surge a necessidade de estudar novos dispositivos, formas, funcionalidades, tecnologias e condições de aplicabilidade para que se possam atingir níveis de eficiência mais elevados e a viabilidade económica dos mesmos, para que assim constituam uma alternativa viável às energias não renováveis, assegurando a satisfação de uma cota relevante dos consumos energéticos. Por outro lado, e como é possível verificar na Figura 1.1, o consumo energético a nível mundial (expresso em Mtoe – Million Tones of Oil Equivalent, ou seja, energia equivalente à extraída em milhões de toneladas de crude) cresceu cerca de 30% nos últimos 14 anos, confirmando a importância do aparecimento de novas fontes de energia alternativas.
Figura 1.1 – Consumo energético mundial por regiões (Enerdata, 2015)
Portugal, apesar de não figurar entre os países com uma produção significativa de gases poluentes para a atmosfera (sendo o quarto país da União Europeia com menores emissões de CO2, de acordo com os
dados da Enerdata (2015)), apresenta um elevado potencial energético em recursos renováveis, mas também condições naturais favoráveis à sua exploração, nomeadamente das energias renováveis marítimas. Com efeito, Portugal, apesar de não ser considerado um país com uma economia estável e concorrente com outros países considerados as potências económicas da união europeia (nomeadamente França e Alemanha), apresenta um investimento significativo em sistemas de produção de energia renovável. A Figura 1.2 comprova o que foi anteriormente referido.
Figura 1.2 – Percentagem de eletricidade gerada por fontes renováveis (Eurostat, 2013)
Os índices de inovação ao nível da capacidade de geração de energia através da água têm aumentado de uma forma constante ao longo dos últimos anos, quer sob a forma de energia extraída através do movimento da água por gravidade (hidro), quer sob a forma de energia extraída através do movimento introduzido pelas ondas oceânicas (onda). O primeiro teve um aumento de 60% e o segundo de 82% entre 2010 e 2015, conforme ilustrado na Figura 1.3.
Figura 1.3 – Evolução do número de inovações no ramo de energia extraída através da água nos últimos 5 anos (Thomson Reuters, 2016)
Embora a produção de energia elétrica através do movimento da água por gravidade (hidro) tenha tido uma maior relevância até à data, é a produção de energia através do potencial das ondas que tem crescido mais rapidamente nos últimos anos. Não desviando as atenções da necessidade de vencer ainda obstáculos logísticos e técnicos nos dispositivos que exploram a energia da água através das duas vertentes apresentadas, os montantes investidos e o registo de novas patentes sugere que investigadores e empreendedores acreditam que estes possam ser ramos válidos e economicamente rentáveis no futuro. Relativamente à energia associada à dinâmica dos oceanos, o índice de inovação pode ser dividido em duas classes, a primeira relativa ao movimento das ondas e a segunda relativa ao movimento associado às marés. As diferenças nos seus níveis de atividade são mostradas na Figura 1.4. A classe de inovação que recorre ao potencial da onda oceânica está a crescer mais rápido do que a classe que se baseia no potencial associado às marés, uma vez que quase duplicou (crescimento de 99%) no período entre 2010 e 2015, enquanto a segunda classe de inovação apenas aumentou 65% durante o mesmo período.
Figura 1.4 – Evolução do número de inovações no ramo da água relacionada com a dinâmica dos oceanos nos últimos 5 anos (Thomson Reuters, 2016)
Presentemente já se estão a testar e a aperfeiçoar várias tecnologias de aproveitamento do potencial energético das ondas. Na secção 2 serão apresentados os mais interessantes para o desenvolvimento do presente trabalho. É importante acrescentar que o tema desta dissertação recai, precisamente, sobre o desenvolvimento e a otimização de um dispositivo inovador para o aproveitamento da energia das ondas e surge na sequência do estudo preliminar realizado por Clemente (2015).
1.2 PERCURSO AINDA A DECORRER
Na presente dissertação foi usado o modelo numérico ANSYS Academic Research Offshore/Marine para desenvolver e otimizar o dispositivo para aproveitamento da energia associado aos movimentos de plataformas flutuantes offshore estudado por Clemente (2015). Essa ferramenta numérica permite o estudo sistemático das variáveis que influem no desempenho desse dispositivo, bem como estimar a sua produção de energia, possibilitando o cumprimento dos objetivos estabelecidos. De realçar que o estudo anterior incidiu, essencialmente, na vertente modelação física.
É importante sublinhar que o trabalho aqui desenvolvido não teria sido possível se não tivesse havido um estudo anterior (Clemente, 2015), onde foram caracterizadas as condições de funcionamento desse dispositivo e que incluiu uma bateria de testes experimentais em modelo físico que possibilitaram a obtenção de dados para a validação qualitativa dos resultados numérico. Esse estudo serviu, assim, como uma base sólida para a passagem para o modelo computacional, caso contrário estaríamos a avaliar situações que provavelmente nem seriam realistas do ponto de vista funcional.
O uso do programa de cálculo hidrodinâmico AQWA favoreceu o estudo das diferentes variáveis que se colocam no problema, permitindo obter resultados para um conjunto mais amplo de condições de teste, melhorando a compreensão da resposta do complexo sistema em estudo. Comparativamente ao modelo físico, foram também analisadas mais combinações de variáveis e de condições de fronteira, precisando melhor os resultados e a obtenção de conclusões melhor estruturadas.
Apesar dos desenvolvimentos que resultam da presente dissertação, ficam ainda por resolver algumas questões práticas. Em estudos futuros, e com as bases fornecidas neste trabalho, poderão definir-se novos caminhos a percorrer, analisar novas variáveis, controlar melhor certos aspetos que dificultam o resultado final, testar com mais pormenor a influência que umas variáveis apresentam relativamente a outras, verificar os diversos comportamentos em condições marítimas que não foram testadas, analisar outras opções para concluir se serão ou não mais favoráveis, entre outros. Um próximo passo, que surge com as conclusões tiradas no final deste trabalho, seria o de elaborar testes experimentais no tanque de ondas com as alterações que foram propostas.
1.3 ESTRUTURA
O presente trabalho surge no âmbito da unidade curricular Dissertação em Hidráulica do Mestrado Integrado em Engenharia Civil da Faculdade de Engenharia da Universidade do Porto. Da estrutura da dissertação fazem parte cinco capítulos que se iniciam com uma introdução do tema abordado e terminam com as perspetivas de desenvolvimentos futuros, referenciando uma possível continuidade dos trabalhos realizados.
A introdução visa apresentar um enquadramento geral e cativar o interesse dos leitores para a temática do aproveitamento dos recursos renováveis do oceano, começando por explicar a necessidade de virar as atenções para o estudo de dispositivos que convertam o potencial energético das ondas do mar em eletricidade. É também caracterizado o consumo atual de energia elétrica a nível nacional, europeu e mundial e indicado o peso que os dispositivos conversores da energia das ondas (Wave Energy converters - WECs) podem representar na produção total de energia. Por fim refere-se o percurso ainda a percorrer e os desenvolvimentos ao longo deste trabalho.
O segundo capítulo contextualiza com mais pormenor os trabalhos já desenvolvidos sobre WECs, descrevendo e analisando alguns dos dispositivos com características idênticas ao desenvolvido nesta dissertação. Por último, é elaborada uma síntese conclusiva relativa a cada um desses dispositivos, apresentando-se ainda algumas notas sobre os conceitos que apresentam maior potencial e que, por esse
motivo, poderão vir a ser tidos em conta na otimização do modelo desenvolvido em Clemente (2015), objetivo do presente trabalho.
O capítulo 3 apresenta os fundamentos teóricos por detrás de toda a análise numérica efetuada com o pacote numérico ANSYS Academic Research Offshore/Marine (simplificadamente designado AQWA), nomeadamente: as teorias de onda mais correntes, hidrostática e hidrodinâmica de corpos flutuantes, leis de semelhança e conversões de escala entre modelo físico e protótipo, entre outros. É importante salientar que a abordagem teórica será um tanto ou quanto resumida, evitando-se assim sobreposição com trabalhos anteriores.
Segue-se o quarto capítulo, no qual se passa a descrever o trabalho numérico propriamente dito. É aqui que são apresentados os diferentes trabalhos e análises realizados, as escolhas tomadas, os resultados obtidos, os objetivos atingidos e as conclusões obtidas. É ainda feita uma reflexão sobre o potencial do dispositivo de conversão de energia das ondas e do programa usado para a sua simulação, e descritos os obstáculos que foram sendo ultrapassados no decorrer do trabalho numérico realizado no âmbito desta dissertação.
Para terminar, o quinto capítulo, intitulado “conclusões e propostas para desenvolvimentos futuros”, tal como o próprio nome indica, propõe-se a instigar futuras investigações no tocante ao dispositivo em estudo, tecendo breves anotações sobre possíveis caminhos a seguir para otimizar, ainda mais, a configuração e as funcionalidades deste conceito inovador.
2
CONTEXTUALIZAÇÃO DOS
TRABALHOS JÁ
DESENVOLVIDOS
2.1 INTRODUÇÃO
Nas últimas quatro décadas, centenas de conversores de energia das ondas (WEC’s) foram propostos e estudados, mas até ao momento ainda nenhum conceito atingiu a fase comercial. Muitos problemas de engenharia estão ainda a ser resolvidos, tais como a capacidade de sobrevivência, a durabilidade e a melhoria da eficiência na absorção da energia das ondas em climas de agitação marítima variáveis no tempo. Por esses motivos, parece razoável afirmar que ainda há um percurso a fazer até se conseguir atingir a viabilidade económica no aproveitamento do recurso energia das ondas. Importa, portanto, para os conceitos com características similares ao dispositivo em estudo, identificar as potencialidades e as fraquezas inerentes, para que se possam tirar conclusões para os estudos futuros.
Os dispositivos conversores do potencial energético das ondas podem ser divididos pelas classes apresentadas na Tabela 2.1.
Tabela 2.1 – Descrição dos principais tipos de WEC existentes (EMEC, 2016)
Tipo de conversor Descrição
Atenuadores
Dispositivo que atua paralelamente à direção da onda, acompanhando o seu movimento. O seu princípio de funcionamento consiste no movimento relativo dos vários braços que o constituem à passagem de ondas.
Absorvedores pontuais
Estrutura flutuante que absorve energia em todas as direções através dos seus movimentos na proximidade da superfície da água. O movimento da parte superior da boia relativamente à base permite a conversão energética. O sistema de extração de energia (PTO) pode apresentar diversas formas. Sistemas articulados no
fundo
Por ação das ondas incidentes, um elemento articulado no fundo oscila em torno de um eixo, como se fosse um pêndulo.
Coluna de água oscilante
Uma estrutura oca, parcialmente submersa, e com uma abertura abaixo do nível médio da água do mar, faz com que uma coluna de ar fique aprisionada. As ondas fazem com que a coluna de água suba e desça criando uma
compressão e uma descompressão na coluna de ar. O ar aprisionado escoa-se para a atmosfera, e no sentido inverso, através de um orifício com uma turbina instalada, que gira sempre na mesma na mesma direção
independentemente da direção da circulação do ar, produzindo-se energia.
Dispositivos de galgamento
Estes dispositivos aproveitam a entrada de água para um reservatório elevado, por espraiamento da onda sobre uma rampa, fazendo com que ela regresse ao mar após passar por uma turbina convencional de baixa queda, para produzir energia. Este tipo de dispositivo pode ainda usar coletores para concentrar a energia da onda incidente.
Pressão diferencial (submerso)
Este tipo de dispositivos estão normalmente localizados próximos da costa e fixos ao fundo marítimo. A movimentação das ondas faz com que o nível de água suba e desça por cima do dispositivo, criando um diferencial de pressão que é usado para produzir energia.
Protuberância ondulatória
Os dispositivos deste tipo consistem num tubo de borracha preenchido com água, amarrado ao fundo marítimo e alinhado com as ondas. A água entra pela popa e as ondas que passam causam variações de pressão ao longo do comprimento do tubo criando a protuberância. À medida que a protuberância atravessa o tubo vai crescendo, armazenando energia que pode ser
aproveitada para acionar uma turbina de baixa queda localizada na proa, onda a água volta ao mar.
Massa rotativa
Existem dois tipos de movimentos de rotação para produção de energia a partir dos movimentos do dispositivo. Esses movimentos podem incitar, quer uma massa excêntrica, quer um giroscópio a oscilar. Nos dois casos a parte móvel está ligado a um gerador elétrico que se encontra dentro do dispositivo.
Outros Esta classificação engloba dispositivos com características únicas e diferentes
O dispositivo estudado por Clemente (2015), e tema do qual a presente dissertação se debruça, trata-se de uma Plataforma Flutuante Offshore Multifuncional (PFOM). Plataforma essa que, tal como o nome indica, flutua no mar e apresenta diversas funcionalidades que são postas em prática fora da costa. Para além de poder atuar associada a um casco com diversas configurações, a PFOM também poderá ser aplicada em navios e embarcações, justificando o nome de multifuncional. Duas dessas aplicações foram estudadas no trabalho de Clemente (2015), nomeadamente a associação do dispositivo a um casco semicilíndrico e a um navio. A particularidade da PFOM descreve-se pelo modo de atuação que é instigado pelos movimentos oscilatórios de balanço de uma plataforma fazendo com que uma massa móvel deslize sobre o segmento de uma calha. É esse movimento da massa móvel que aciona o motor do sistema de produção de energia, aproveitando, assim, o potencial energético das ondas. O dispositivo em questão insere-se no tipo de conversores de energia de massa rotativa e o seu princípio de funcionamento está esquematizado na Figura 2.1.
Figura 2.1 – Princípio de funcionamento da PFOM
Neste capítulo irão ser apresentados em mais detalhe alguns dos dispositivos do tipo “massa rotativa” e um dispositivo do tipo “absorvedores pontuais”, que se encontram ainda em fase de estudo e desenvolvimento, e descritas as principais ideias e conclusões tendo em vista a melhoria e o aumento da eficácia da PFOM. Por motivos óbvios, os dispositivos analisados têm, em certos aspetos, características similares ao dispositivo em estudo nesta dissertação. Assim, nos primeiros subcapítulos será descrito, sucintamente, o funcionamento e constituição de cada dispositivo para depois, no último subcapítulo, se proceder a uma análise comparativa com o modelo estudado em Clemente (2015) e tentar de alguma forma combinar os conhecimentos e noções que poderão ser úteis para desenvolver este trabalho.
2.2 ISWEC
A tecnologia ISWEC é instalada no interior de uma plataforma flutuante que é capaz de se auto alinhar com a direção principal das ondas. Esta tecnologia é baseada num sistema giroscópico que explora a passagem das cristas e das cavas das ondas pelo dispositivo, para produzir energia. Um sistema eletrónico prevê e monitoriza as condições de agitação para controlar instantaneamente o ISWEC e assim extrair a máxima potência possível. Esse sistema de monitorização e previsão representa uma vantagem competitiva importante para a tecnologia ISWEC permitindo-lhe ser versátil e extrair uma potência média de 14.53 kW, Mattiazzo et al. (2011).
Os principais componentes do sistema ISWEC são:
O gerador de energia;
A engrenagem;
O giroscópio;
O painel eletrónico.
As oscilações do casco da embarcação induzem uma rotação da plataforma de suporte do giroscópio. Esta rotação é convertida em energia elétrica pelo gerador de energia. As componentes deste sistema foram já objeto de estudos tendo em vista a sua otimização.
As principais vantagens da tecnologia ISWEC são: a manutenção requerida é mínima pois não tem partes móveis submersas; o impacto ambiental é pouco relevante uma vez que se trata de um sistema totalmente baseado em inércia, apresenta elevada produtividade e adaptabilidade às mudanças das condições de agitação e não apresenta cabos de amarração fixos, Wave for Energy (2015).
A extração de energia é feita numa central offshore que dispõe de vários subsistemas ISWEC, onde a eletricidade produzida é transmitida para outra central em terra que, depois, é transportada de lá para o tecido urbano.
Na Figura 2.2 resume esquematicamente o funcionamento e os componentes da patente.
Figura 2.2 – Desenho conceptual do modelo ISWEC (Wave For Energy, 2015)
2.3 WITT
“Whatever Input to Torsion Transfer”, mais conhecido pela abreviatura WITT, é um dispositivo que foi desenvolvido para produzir energia a partir de qualquer movimento, aproveitando todos os seis graus de liberdade e podendo ser aplicado em diversas situações, quer sejam náuticas ou não. A sua principal
vantagem é poder ser replicado em vários tamanhos, desde o mais pequeno (e.g. porta-chaves - 0.2 W) ao maior (e.g. boias de assistência de navegação – 40 W).
O seu princípio de funcionamento base consiste em tornar todo o movimento aplicado ao dispositivo, i.e., movimentos de translação e rotação segundo cada um dos seus três eixos, num único movimento axial, por intermédio de mecanismos interligados, criando um momento de torsão e incitando um pêndulo 3D a produzir energia. Todo este mecanismo encontra-se inserido numa estrutura rígida de suporte, restringindo o contacto com o meio, o que permite minorar um dos grandes problemas em sistemas de aproveitamento de energia renovável semelhantes, que é o custo com a manutenção. Na Figura 2.3 e na Figura 2.4 são apresentados esquemas dos movimentos (de 1 a 3 as rotações segundo os três eixos e de 4 a 6 os três deslocamentos possíveis segundo os mesmos eixos) aproveitados para a produção de energia e da estrutura do dispositivo, respetivamente.
Figura 2.3 – Esquema dos movimentos que incitam funcionamento do WITT (Witt Limited, 2016)
A Witt Limited é a empresa que detém a patente deste sistema e que pretende aplicar no aproveitamento dos recursos renováveis marítimos (marés e agitação marítima) nomeadamente em boias luminosas de navegação, sistemas de localização GPS ou para recarregar baterias de navios ancorados. As principais vantagens deste aparelho são:
Não apresenta impactos ambientais, apresentando-se como uma verdadeira “green solution”;
Os componentes industriais do sistema de transmissão do tipo “fit and forget” foram já testados e experimentados;
O dispositivo é totalmente selado para impedir o contacto com o ambiente exterior;
Preços de aquisição competitivos com as de outros dispositivos.
2.4 WELLO OY PENGUIN
O Penguin foi projetado para capturar a energia de rotação gerada pelos movimentos do seu casco, de forma assimétrica, induzidos pela passagem das ondas. Esses movimentos são utilizados para acelerar e manter as rotações de um pêndulo alojado no interior do casco o qual, por sua vez, aciona um gerador elétrico para a produção de eletricidade que é, em seguida, transportada para a costa através de um cabo submarino (EMEC,2016). A potência gerada é conduzida, diretamente, a partir da massa girante para o gerador utilizando o mesmo eixo, com o intuito de eliminar as perdas de conversão. O dispositivo realiza a conversão de energia das ondas de uma forma contínua, sem recorrer a elementos hidráulicos, juntas ou engrenagens, contrariamente ao habitual movimento oscilatório que envolve inversão de sentido e que é descontínuo. A sua forma característica potencia a produção, sendo que todos os seus componentes de geração se encontram dentro da estrutura. Estes componentes são semelhantes aos usados em turbinas eólicas, o que significa que este WEC terá custos concorrentes com os dispositivos de produção de energia eólica offshore, Wello Oy Company (2016). Na Figura 2.5 está representado esquematicamente o interior do dispositivo em questão.
O conceito Wello Penguin já foi testado com sucesso a diversas escalas, quer em laboratório, quer em alto mar, tendo sido obtidas potências de pico até 500kW. Na Figura 2.6 apresenta-se o dispositivo a realizar testes no mar, em 2015.
Figura 2.6 – Wello Penguin a converter energia das ondas em Orkney (Wello Oy Company, 2016)
2.5 DISPOSITIVO DA FRAUNHOFER
A empresa Fraunhofer desenvolveu um dispositivo capaz de extrair energia das ondas, que pode ser acoplado a navios e embarcações, o que permite fazer a extração em diversos locais, em vez de se estar restringido a um local fixo. As principais vantagens deste dispositivo são:
Possibilidade de escolher condições e estados de mar mais favoráveis à produção de energia, estando inativo ou em funcionamento por forma a funcionar na curva de rendimentos ótima;
Evitar situações ambientais agressivas, como por exemplo tempestades, que representem ameaças à integridade do dispositivo, poupando assim em custos iniciais, de proteção e de manutenção;
Não requer conexão por cabos até à costa, fazendo o depósito de energia extraída em baterias, o que evita gastos extra e simplifica a logística.
É importante perceber que realizar o armazenamento de energia em baterias tem algumas limitações funcionais, uma vez que existem perdas por sobreaquecimento e perdas ao longo do tempo, aliadas ao fato de haver um limite de energia que se pode armazenar.
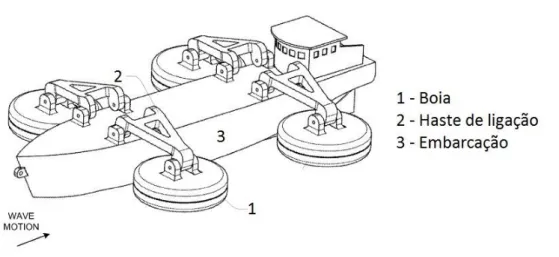
O dispositivo em questão tira proveito do movimento de arfagem que cria um movimento ascendente e descendente de umas boias que se encontram ligadas por hastes à embarcação, permitindo a extração de energia. Na Figura 2.7 apresenta-se o esquema dos componentes do dispositivo.
Figura 2.7 – Sistema móvel de recolha da energia das ondas da Fraunhofer (Fraunhofer-Gesellschaft, 2016) Um sistema típico destes aplica-se numa embarcação com 50 m de comprimento, apresentando 1 MW de capacidade de extração de energia e 20 MWh de capacidade de armazenamento. Operacionalmente, as embarcações dotadas de um sistema como este deslocam-se para uma localização favorável offshore, fazendo a recolha de energia durante aproximadamente 20 horas. Após regressar à costa, o dispositivo conecta-se à rede elétrica, libertando a energia armazenada durante períodos de grande carência. Cálculos preliminares estimam custo inicial de eletricidade de 0.15 dólares por kWh (Fraunhofer-Gesellschaft, 2016). A Figura 2.8 esquematiza o processo de funcionamento do dispositivo.
Figura 2.8 – Esquema representativo do funcionamento do dispositivo Deslocação até localização favorável Recolha durante 20h aprox. Viagem de regresso Ligação à rede Fornecime nto em períodos de carência
2.6 CONCLUSÕES 2.6.1 SITUAÇÃO ATUAL
Em primeiro lugar convém referir que os dispositivos apresentados neste capítulo são apenas alguns de muitos já existentes e, muitos deles, ainda se encontram numa fase de estudo e desenvolvimento. Há ainda trabalho árduo a realizar pelas diversas empresas e entidades envolvidas para se chegar ao objetivo final, uma solução economicamente rentável.
Tanto no trabalho desenvolvido por Clemente (2015) como na presente dissertação houve necessidade de investigar os aspetos mais interessantes e as técnicas mais inovadoras aplicadas nos sistemas de conversão de energia das ondas apresentados nos subcapítulos anteriores.
Para se tornar mais fácil contextualizar o dispositivo desenvolvido em Clemente (2015) e continuado neste trabalho, refere-se que o mesmo é constituído por uma plataforma flutuante (casco semicilíndrico ou um navio) à qual está acoplada uma estrutura metálica que serve de suporte ao sistema de extração de energia, o qual é composto por uma componente móvel que desliza sobre uma cremalheira. O contacto dessa componente móvel com a cremalheira é feito por um pinhão que aciona o gerador elétrico. A energia produzida pode ser armazenada localmente numa bateria, ou transmitida para terra por um cabo submarino, dependendo do tipo de aplicação em causa. O principal grau de liberdade explorado é o balanço pelo que, em princípio, fará sentido que o protótipo seja orientado perpendicularmente à direção principal das ondas. Este dispositivo insere-se na classe dos WEC’s do tipo massa rotativa.
Mais à frente, no capítulo 4, irá ser feito um aprofundamento sobre as técnicas de funcionamento e sobre os componentes ligados a este modelo.
2.6.2 ISWEC
O primeiro conceito analisado, o ISWEC, assemelha-se ao dispositivo em estudo por apresentar uma estrutura de proteção do sistema de extração de energia (PTO), reduzindo o contacto com o mar e as condições marítimas adversas e diminuindo os consideráveis custos de manutenção.
Outro aspeto que aproxima o ISWEC com o dispositivo estudado nesta dissertação reside no fato de o ponto ótimo de funcionamento do ISWEC ocorrer para ondas com períodos de 7 s e alturas de onda de 1.5 m, Wave for Energy (2015). Esta combinação trata-se de uma das mais frequentes na costa marítima norte portuguesa, local para onde a PFOM se projeta.
Acrescenta-se ainda uma conclusão importante, que poderá ser testada noutros dispositivos, que é o facto de as potências serem maximizadas para relações entre o comprimento do corpo flutuante e o comprimento de onda entre 1/3 e 1/2, Mattiazzo et al. (2014).
2.6.3 WITT
O WITT é também um dispositivo protegido por uma estrutura rígida evitando o contacto entre os seus componentes e a água do mar. Tomou-se a opção de abordar este sistema uma vez que é de grande interesse, no que diz respeito a questões evolutivas do sistema de extração de energia presente na PFOM, por aproveitar todos os seis graus de liberdade do movimento da estrutura flutuante.
É de todo o interesse, para futuros estudos, que o WITT fosse melhorado e concebido às diversas escalas para que fosse avaliado o seu desempenho quando associado a plataformas das mais diversas formas. Tal como na PFOM, uma vantagem do WITT reside no facto de o custo de conceção ser bastante reduzido comparativamente com outros modelos. Isto fará com que uma possível menor capacidade de produção seja compensada pela componente do custo inicial de investimento.
2.6.4 WELLOOY PENGUIN
O Wello Penguin apresenta uma estrutura que envolve sistemas mais sensíveis, protegendo-os contra a agressividade do mar. Uma ideia igualmente importante e que importa referir pois pode ser proveitosa para o estudo em curso, é o da forma assimétrica que apresenta, podendo auto orientar-se segundo as direções principais das ondas, maximizando a extração de energia. Um desafio que se pode colocar à PFOM é o de tentar que o PTO funcionasse em regime contínuo tal como o presente no Penguin. Relativamente à escala usada, quer no Penguin, quer num possível protótipo do dispositivo em estudo, era de todo o interesse que fossem parecidas para facilitar a comparação de resultados (e.g., potências extraídas) e assim analisar de que forma a hidrodinâmica e o PTO de cada conceito influenciam a energia produzida.
2.6.5 DISPOSITIVO DA FRAUNHOFER
O dispositivo da Fraunhofer apresenta-se como sendo um conceito que atua associado a embarcações e navios. Este conceito poderá ser também testado em plataformas semicilíndricas como a que foi testada em Clemente (2015) e, caso se verifique que se trata de uma situação benéfica, aprofundar mais o estudo deste conceito representaria uma mais valia. Já se tinha falado na possibilidade de tal vir a acontecer, mas o principal senão era o de que o ângulo de balanço máximo verificado em embarcações poderia não justificar tal opção, uma vez que convém que seja reduzido por motivos de segurança de navegabilidade. A tecnologia envolvida no armazenamento em baterias da energia produzida vai de encontro ao pensado para o modelo analisado em Clemente (2015), mas com um ajuste da quantidade, do limite de potência e certamente das dimensões que se irão adotar para o protótipo.
3
CONCEITOS TEÓRICOS DE
SUPORTE AO ESTUDO
3.1 INTRODUÇÃO
O presente capítulo serve para apresentar e explicar os métodos de análise e cálculo envolvidos no estudo de dispositivos de conversão do potencial energético das ondas. Assim, em cada subcapítulo, será feita uma abordagem geral dos diversos temas relacionados com agitação marítima, semelhança hidráulica, momentos de inércia e centro de gravidade, hidrostática, hidrodinâmica, interação onda-estrutura, entre outros. Os temas que estão diretamente envolvidos no processo de cálculo numérico empregue no ANSYS Academic Research Offshore/Marine serão tratados com mais detalhe.
Como tudo na vida, é necessário o conhecimento da teoria que descreve os fenómenos na natureza bem como o conhecimento do que realmente acontece na prática para se poder estabelecer uma ponte de conceitos, melhorar o intelecto e tentar aperfeiçoar e complementar os dois campos. Sabe-se que nem sempre o que acontece na prática vai de encontro com os pressupostos teóricos, mas é possível observar fortes relações entre comportamentos previstos dos que realmente acontecem. Esta é a base do desenvolvimento e é por aí que este capítulo se submete a explorar com mais destaque.
3.2 GERAÇÃO E CARACTERIZAÇÃO DOS TIPOS DE ONDA 3.2.1 INTRODUÇÃO
Uma vez que o dispositivo de conversão da energia das ondas que dá tema a esta dissertação será posto em ação no mar e, principalmente, o seu funcionamento dependerá das condições de agitação marítima, fará todo o sentido começar por explicar a origem das ondas e os tipos de ondas existentes. Contudo, este tema não será muito desenvolvido pois encontra-se suficientemente detalhado na generalidade dos manuais da especialidade (e.g., Coastal Engineering Manual - Demirbilek & Linwood, 2008). O objetivo é apresentar sucintamente alguns fundamentos teóricos tendo em vista a compreensão dos parâmetros e das variáveis que têm influência no funcionamento e no desempenho do dispositivo em estudo.
3.2.2 AGITAÇÃO MARÍTIMA
A agitação marítima pode ser caracterizada em três diferentes zonas. Numa primeira zona, a zona de geração, uma vaga é formada pela ação de ventos intensos e persistentes sobre a superfície de contacto entre atmosfera e o mar, causando estados caóticos de agitação. Estas ondas são caracterizadas por terem
período reduzido, aparência irregular e crista curta na zona de geração, também conhecida como Fetch, tal como indica Figura 3.1.
Figura 3.1 – Zona de Geração (adaptação de CRES, 2012)
A propagação das vagas dá-se na direção da ação do vento. Durante esse deslocamento, e saindo da zona de geração, as vagas adaptam-se às novas condições, alterando as suas características – a crista passa a ser mais longa e a variabilidade diminui. Entra-se na zona de declínio e a agitação toma o nome de ondulação.
Ao longo deste percurso a energia transportada pela onda é, em parte, dissipada e, já na plataforma continental, a onda sofre a influência dos fundos até que se dá a rebentação. Estas três fases estão esquematizadas na Figura 3.2.
Figura 3.2 – Fases da agitação marítima (Veloso Gomes, 2014)
3.3 ONDAS REGULARES 3.3.1 INTRODUÇÃO
Essencialmente podem distinguir-se três tipos de ondas. As primeiras são as ondas regulares que apresentam, tal como o nome indica, características constantes ao longo do tempo (período e altura de
onda). No entanto, estas ondas não ocorrem na natureza, exatamente pelo seu carácter constante e determinado. Ou seja, este tipo de ondas não se observa em condições naturais, uma vez que são inúmeras as interferências presentes no ambiente marítimo, quer seja por ação das correntes, diferenças de pressão, ação do vento, obstruções, entre outros. Todas estas influências não são controladas pelo ser humano o que por si só justifica o carácter irregular da agitação marítima que ocorre na natureza. Stokes (1847) propôs uma teoria irrotacional que se provaria, mais tarde, não ter tido o sucesso desejado no seu desenvolvimento. Airy, entre outros autores, formulou uma solução de primeira ordem, baseando-se apenas no primeiro termo linear de uma função potencial de velocidades, que viria a reproduzir matematicamente as ondas regulares. A teoria linear, ou de Airy, não é a única que pode ser aplicada a esta classe de ondas, mas é aquela que é mais usada como primeira aproximação. A escolha da teoria apropriada poderá ser feita com base na relação entre os parâmetros adimensionais apresentados na Figura 3.3.
Figura 3.3 – Condições de aplicabilidade das teorias para ondas regulares (CEM, 2008) No subcapítulo que se segue irá ser feita a abordagem à formulação de Airy ou teoria linear.
3.3.2 TEORIA LINEAR
3.3.2.1 Parâmetros a Considerar
A teoria linear formula-se assumindo que as seguintes condições são respeitadas:
A onda é progressiva e bidimensional, propagando-se através de um fluido homogéneo, incompressível e não viscoso;
A pressão ao longo da superfície livre é constante e uniforme;
A configuração da onda é invariante no tempo e no espaço;
A profundidade de água (d) é uniforme;
A propagação da onda realiza-se numa direção preferencial (OX) com uma velocidade C;
O eixo de propagação pertence ao plano de repouso inicial;
A amplitude de onda é pequena em relação ao comprimento de onda;
O movimento das partículas é irrotacional.
Alguns destes pressupostos estão apresentados na Figura 3.4.
Figura 3.4 – Convenções da onda sinusoidal (Veloso Gomes, 2015)
Antes de começar a ser explicada a formulação da teoria linear convém definir alguns parâmetros característicos do sistema de ondas: a crista, que representa a elevação da superfície livre acima do nível médio da água do mar e a cava que é o oposto da crista; o comprimento de onda (L [m]), dado pela distância horizontal entre duas cristas ou duas cavas sucessivas; a altura de onda (H=2a [m]), dada pela distância vertical entre crista e cava; a amplitude (a [m]); o período de onda (T [s]), intervalo de tempo correspondente à passagem de duas cristas sucessivas por um ponto fixo localizado sobre o eixo OX; o número de onda (k=2π/L); a frequência angular de onda (w=2π/T [Hz]), que representa o inverso do período de onda e a celeridade (C [m/s]), velocidade do movimento aparente das cristas.
3.3.2.2 Potencial de Velocidades
Considere-se a seguinte expressão que define o potencial de velocidades (3.1):
𝜙 (𝑥, 𝑧, 𝑡) = 𝐴 𝑐𝑜𝑠ℎ(𝑘(𝑧 + 𝑑))𝑠𝑒𝑛(𝑘𝑥 − 𝑤𝑡) (3.1)
𝐴 =𝑎 𝑔 𝜔
1
cosh (𝑘𝑑) (3.2)
onde w e k representam, respetivamente, a frequência angular de onda e o número de onda e A a amplitude de onda. Assim, se derivarmos em segunda ordem as três dimensões do potencial obtemos:
𝜕2𝜙 𝜕𝑥2 = −𝐴 𝑘2cosh(𝑘(𝑧 + 𝑑)) 𝑠𝑒𝑛(𝑘𝑥 − 𝑤𝑡) (3.3) 𝜕2𝜙 𝜕𝑦2 = 0 (3.4) 𝜕2𝜙 𝜕𝑧2 = 𝐴 𝑘2cosh(𝑘(𝑧 + 𝑑)) 𝑠𝑒𝑛(𝑘𝑥 − 𝑤𝑡) (3.5)
o que significa que:
Σ = ∇2𝜙 = 0 (3.6)
Comprovando que está presente um movimento irrotacional, tal como indica a formulação de Laplace. Também é necessário atender que 𝜙 deverá satisfazer a condição de não passagem de um fluido através da fronteira, ou seja:
𝑣 = (𝜕𝜙
𝜕𝑧)𝑧=−𝑑= 0
(3.7)
3.3.2.3 Definição Matemática da Celeridade e do Comprimento de Onda
Em termos teóricos, para profundidades infinitas, o fundo não influencia a celeridade e o comprimento de onda, uma vez que estes dependem apenas do período T (Demirbilek & Linwood, 2008). Tendo em conta o que foi dito, temos:
𝐿0= 𝑔𝑇2 2𝜋 (3.8) 𝐶0= 𝐿0 𝑇 = √ 𝑔𝐿0 2𝜋 = 𝑔𝑇 2𝜋 (3.9)
onde L0 e C0 representam o comprimento de onda e a celeridade em águas profundas, respetivamente. Em profundidades finitas terá que ser tida em conta a influência da profundidade de água na definição destes parâmetros. A relação de dispersão, que relaciona o comprimento de onda com o período de onda, é dada por, 𝐿 =𝑔𝑇 2 2𝜋 𝑡𝑎𝑛ℎ 2𝜋𝑑 𝐿 (3.10)