Projeto de garra eletromecânica fixado em veículo aéreo não tripulado tipo
quadrimotor para transporte de cargas
Electromechanical grapple design attached to a four-engine unmanned aerial
vehicle for cargo transportation
DOI:10.34117/bjdv6n5-468
Recebimento dos originais: 10/04/2020 Aceitação para publicação: 22/05/2020
Alan de Carvalho Araújo
Graduando em Engenharia Elétrica pela Universidade Federal do Maranhão Instituição: Universidade Federal do Maranhão
Endereço: Av. dos Portugueses, 1966 - Vila Bacanga, São Luís - MA, Brasil, 65080-805 E-mail: [email protected]
Evandro Martins Araújo Filho
Mestre em Engenharia Elétrica pela Universidade Federal do Maranhão Instituição: Universidade Federal do Maranhão
Endereço: Av. dos Portugueses, 1966 - Vila Bacanga, São Luís - MA, Brasil, 65080-805 E-mail: [email protected]
Daniel Trovão Simões
Graduado em Engenharia Elétrica pela Universidade Federal do Maranhão Instituição: Universidade Federal do Maranhão
Endereço: Av. dos Portugueses, 1966 - Vila Bacanga, São Luís - MA, Brasil, 65080-805 E-mail: [email protected]
João Viana da Fonseca Neto
Doutor em Engenharia Elétrica pela Universidade Estadual de Campinas Instituição: Universidade Federal do Maranhão
Endereço: Av. dos Portugueses, 1966 - Vila Bacanga, São Luís - MA, Brasil, 65080-805 E-mail: [email protected]
RESUMO
O presente trabalho visa a construção de um quadrimotor, popularmente chamador de drone, capaz de suportar uma garra eletromecânica, possibilitando a viabilidade para transporte de cargas e materiais. Bem como o desenvolvimento de um protótipo capaz de movimentar objetos de forma segura e efetiva. Utiliza-se um drone do tipo F450 que utiliza a controladora APM, baseada no microcontrolador Arduino Mega, que é específica para veículos como: carros e aeromodelos. O projeto tridimensional do protótipo de garra é desenvolvido utilizando o software SolidWorks®, que permite a simulação dinâmica de todos os seus componentes, analisando-se o movimento de todas as partes móveis no sistema, possibilitando a sua execução. A fabricação da garra se deu por meio de um processo de prototipagem rápida, também conhecida como impressão 3D. O sistema de acionamento eletromecânico basicamente é composto por um atuador (um motor de passo) e um circuito drive responsável pelo comando do atuador. O protótipo desenvolvido possibilita ao quadrimotor o transporte de pequenas cargas de até 200 gramas, o que torna viável sua aplicação para logística de alguns tipos de cargas.
Palavras-chave: Quadrimotor. Garra. Transporte. ABSTRACT
The present work aims at the construction of a four-engine, popularly called a drone, capable of supporting an electromechanical claw, enabling the viability to transport loads and materials. As well as the development of a prototype capable of moving objects safely and effectively. A F450 type drone is used that uses the APM controller, based on the Arduino Mega microcontroller, which is specific to vehicles such as: cars and model airplanes. The three-dimensional design of the
grapple prototype is developed using the SolidWorks® software, which allows the dynamic simulation of all its components, analyzing the movement of all moving parts in the system, enabling its execution. The claw was manufactured through a rapid prototyping process, also known as 3D printing. The electromechanical drive system basically consists of an actuator (a stepper motor) and a drive circuit responsible for controlling the actuator. The developed prototype allows the four-engine to transport small loads of up to 200 grams, which makes its application for logistics of some types of cargo viable.
Keywords: Quadrimotor. Claw. Transport. 1 INTRODUÇÃO
As empresas e indústrias possuem um notório interesse no avanço tecnológico a fim de facilitar na logística de transporte de matérias primas. A manipulação de cargas no espaço aéreo possibilita interações mais precisas entre veículos aéreos não tripulados (VANT) e objetos em seu ambiente físico (Kruse & Bradley, 2018). Os VANTs podem locomover-se em áreas de difícil acesso ou até mesmo áreas de perigo eminente como: zonas de destroços ou queimadas em florestas. Estes veículos auxiliam na fiscalização de grandes áreas como: lavouras ou grandes eventos de apresentação pública. Quando equipados com manipuladores ou similares, podem ajudar no transporte de kits de primeiros socorros ou suprimentos, e recuperação de amostras (Abaunza, Cariño, Castillo, & Lozano, 2017). Nota-se também que eles são capazes de realizar trabalhos com válvulas, como por exemplo em (Orsag, Korpela, Bogdan, & Oh, 2014) ou até mesmo fazer a manutenção de linhas de transmissão de áreas remotas, como citado em (Mellinger, Lindsey, Shomin, & Kumar, 2011).
O problema de manipular objetos utilizando dispositivos eletromecânicos tem sido um dos maiores tópicos de pesquisa nos últimos cinquenta anos (Kyriakopoulos, Zisimatos, Liarokapis, & Mavrogiannis, 2014). Atualmente, manipuladores são ferramentas fundamentais no transporte de objetos, tanto na indústria quanto na pesquisa, devido seu baixo nível de complexidade e custo relativamente baixo (Fajardo, Ferman, Lemus, & Rohmer, 2017). Contudo, os manipuladores tem se desenvolvido e caminhado em direção cada vez mais para aumentar sua performance e sua aparência humana (M. Grebenstein, 2011), o que vai aumentar tanto o grau de complexidade quanto os preços inegavelmente. Mas não se é certeza que a performance e a capacidade das garras serão proporcionais ao preço.
Esse trabalho visa contribuir com um manipulador eletromecânico do tipo garra fabricada através de um processo de prototipagem rápida, também conhecida como impressão 3D, e que é fixada em um quadrimotor. Esse dispositivo é acionado pela chave do transmissor, desta forma o piloto não precisa retirar a mão de um dos manches para controlá-lo. Por possuir placas na ponta, é extremamente eficiente em situações em que se deseja agarrar cubos ou caixas. Também deve ser considerado que essa garra possui um baixo grau de complexidade, devido a um sistema de engrenagens simples que junto a um atuador, composto por drive e Arduino, abrirá e fechará a garra. O seu formato simples em conjunto a seu acionamento remoto permite que o piloto consiga usufruir das vantagens da garra fixada ao quadrimotor.
2 MANIPULADORES
Ao longo do tempo, foi-se necessária uma mão-de-obra automática e que pudesse fazer trabalhos contínuos, com essa problemática, projetistas fizeram os primeiros braços robóticos que possuíam sistemas simples, capacidade limitada de agarramento e só trabalhavam com locais previamente conhecidos (Kyriakopoulos, Zisimatos, Liarokapis, & Mavrogiannis, 2014). Atualmente, são projetados e desenvolvidos diversos tipos de dispositivos capazes de imitar a mão humana que vão se superando cada vez mais, um exemplo disso são os manipuladores.
Em sistemas que necessitam apanhar e posicionar objetos de um determinado lugar para outro comumente são utilizados os manipuladores. Dentre os vários tipos de manipuladores, dois têm se destacado nos últimos anos, que são os manipuladores tipo garra e os manipuladores do tipo braço (S. Kim, 2013). Os manipuladores do tipo garra são mais versáteis e fáceis de controlar, porém os manipuladores do tipo braço oferecem maior precisão. Ao se produzir um manipulador deve-se escolher dentre esses tipos, contudo há trabalhos como o de (Kruse & Bradley, 2018) que concatena os dois tipos mas aumenta muito a sua complexidade.
Os manipuladores do tipo braço tendem a ser mais precisos, entretanto, isso exige uma abordagem mais complicada. Já manipuladores do tipo garra tendem a ser mais simples, todavia podem não ser tão precisos. As do tipo braço ainda possuem a vantagem de conseguir agarrar objetos em maiores distâncias dado seu comprimento, contudo, elas seguram objetos de menores tamanhos devido à dimensão de suas pinças se comparadas as do tipo garra. Escolher entre esses dois tipos é escolher entre complexidade, precisão e tamanho; ou simplicidade e distância. Os tipos de manipuladores podem ser vistos na Figura 1.
Figura 1 - Tipos de manipuladores
(a) Manipulador do tipo braço (b) Manipulador do tipo garra
3 MANIPULADOR AÉREO
Nesta secção será abordado em várias subsecções como foi desenvolvida a garra eletromecânica, qual quadrimotor e transmissor foram utilizados, como foi projetada, impressa e controlada a garra.
3.1 QUADRIMOTOR UTILIZADO
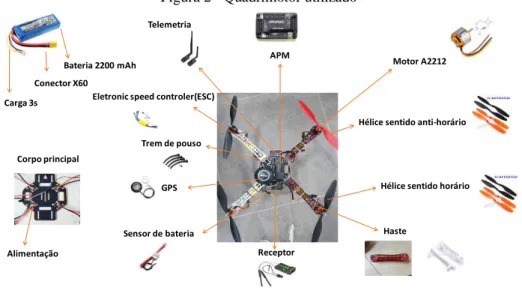
O quadrimotor utilizado tem a capacidade de voar com uma determinada quantidade de peso por até 10 minutos. Ele é composto por uma garra eletromecânica e o objeto a ser transportado, mantendo um baixo custo comparado aos quadrimotores de marcas consolidadas no mercado como:
DJI e Parrot. Os componentes utilizados podem ser vistos conforme mostra a Figura 2.
Figura 2 - Quadrimotor utilizado
Motor A2212
Hélice sentido anti-horário
Hélice sentido horário
Receptor Telemetria
APM
Eletronic speed controler(ESC)
Sensor de bateria Trem de pouso GPS Bateria 2200 mAh Carga 3s Conector X60 Alimentação Corpo principal Haste
3.2 TRANSMISSOR
Para controlar o quadrimotor é usado o transmissor da FLYSKY FS-I6X, que permite a seleção de configurações internas através de chaves. Além disso, este dispositivo possui trimmers, que são botões, na parte externa do transmissor que tem como função efetuar pequenos ajustes na movimentação do quadrimotor. Outra vantagem é o fato que esse transmissor possui 2 manches e 6
canais, sendo que 2 canais são analógicos e os outros 4 são digitais como pode ser visto na Figura 3.
Figura 3 - Transmissor do quadrimotor.
De acordo com a Figura 3, o número 1 representa os manches, 2 representa a chave A, 3 representa a chave B, 4 potenciômetro A, 5 potenciômetro B, 6 chave C, 7 chave D, 8 trimmers. Nota-se que a chave C possui 3 posições e a chave D possui 2 posições, desta forma com 2 chaves
pode-se alterar entre 6 modkos de voo, como é aprepode-sentado pela Tabela 1. Isso é vantajoso pois
consegue-se um maior número de modos de voo com poucas chaves.
Tabela 1 - Modos de voo de acordo com os Chavees C e D
Chave C Chave D modo de voo
Posição 1 Posição 1 modo 1 Posição 2 Posição 1 modo 2 Posição 3 Posição 1 modo 3 Posição 1 Posição 2 modo 4 Posição 2 Posição 2 modo 5 Posição 3 Posição 2 modo 6
1 2 3 7 5 4 6 8
Por usar apenas 2 chaves para designar o modo de voo, restam 2 chaves onde usa-se a chave A para que o motor de passo procure o fim de curso e a chave B para acionar o abre e fecha da garra.
O sinal de PWM (Pulse Width Modulation ou Modulação de Largura de Pulso) é emitido pelo receptor quando as chaves do transmissor são utilizadas, desta forma, tem-se um número de sinais iguais ao número de chaves, onde cada sinal possui um nível de acordo com a sua forma de acionamento. Isto permite conectar vários dispositivos para desempenhar várias funções.
3.3 GARRA ELETROMECÂNICA
O projeto tridimensional da garra é desenvolvido em um software de CAD 3D chamado de
SolidWorks. Nele inicialmente começa-se com um esboço 2D que depois é transformado em um modelo tridimensional. A garra é composta por 11 peças que foram projetadas individualmente para em seguida serem agrupadas, de forma que todo o sistema seja montado de forma virtual. A
montagem pode ser vista conforme mostra a Figura 4.
Figura 4 - Projeto da Garra em SolidWorks.
A fabricação da garra é feita em uma prototipagem rápida, também conhecida como impressão 3D, usando o material poliácido láctico (PLA ou ácido poliláctico) que é obtido através de recursos renováveis. Para fins de maior aderência da garra aos objetos alvos, as placas inferiores foram revestidas com um material com maior atrito, para isso é usado a espuma vinílica acetinada (EVA).
3.4 CONTROLE DA GARRA
O acionamento da garra é realizado por um sistema de engrenagens acoplado a um motor de passo. O motor de passo utilizado é um NEMA 17 e o drive é o A4988. Um Arduino é necessário para enviar um sinal ao drive. Tendo em vista minimizar as dimensões do projeto como um todo optou-se por utilizar um Arduino Nano, que possui o necessário para desempenhar seu papel.
O Drive precisa de uma alimentação de 12 volts, portanto nele é conectado uma linha de força diretamente da bateria que energiza o quadrimotor. O acionamento deste drive se dá pela chave B do transmissor e todo o processo de funcionamento pode ser constatado pelo fluxograma apresentado na
Figura 5.
Figura 5 - Fluxograma do controle da garra
4 RESULTADOS
A garra é fixada ao quadrimotor a uma distância de 25 cm, levando-se em consideração que em valores menores do que esse o vento das hélices irá aumentar a perturbação do quadrimotor devido à proximidade ao solo. E se a garra for fixada a uma distância muito grande em relação ao quadrimotor haverá maior instabilidade na garra, pois ela irá pendular mais no ar. A garra fixada ao quadrimotor pode ser visualizada na Figura 6.
A garra é testada para um caso em que o objeto tem um formato de um cubo de volume igual a 1000 cm³ com um peso de aproximadamente 200 gramas, o que é mais que o manipulador do tipo garra de (Kruse & Bradley, 2018) foi capaz de carregar. Os testes são realizados tanto em espaço aberto quanto em espaço fechado para avaliar o comportamento do conjunto nos mais diversos tipos de ambiente.
Os resultados dos testes em espaço fechado apresentam um resultado menos satisfatório, pois apesar da menor influência de ventos e outros tipos de perturbações facilmente observadas em ambientes externos, não é possível utilizar o modo de voo loiter que necessita de GPS e ajuda na movimentação e equilíbrio no ar tornando mais difícil posicionar a garra sobre o cubo e manter o quadrimotor estabilizado enquanto a garra se fecha e agarra o objeto. Já os testes em espaço aberto tiveram melhores taxas de sucesso, que apesar dos distúrbios, exemplo: o vento, é possível utilizar o
Garra procura fim de curso.
Liga Drone Switch B
Acionado? Sim Garra fecha Garra Abre Motor para. Posição atual igual a zero. Não
modo loiter o que manteve o quadrimotor estabilizado no ar sobre o cubo por mais tempo, o suficiente para que a garra consiga fechar sobre o objeto.
Figura 6 – Garra fixada ao quadrimotor. (a) sem carga. (b) com carga.
A garra fixada ao quadrimotor e fechando sobre o cubo pode ser visto na Figura 6, nota-se que
a garra executa sua função de forma apropriada, demostrando a viabilidade de uma possível implementação em outros quadrimotores.
5 CONCLUSÕES
O presente trabalho apresentou o projeto e o desenvolvimento de uma garra eletromecânica fixada a um quadrimotor, que é acionada através do próprio transmissor do quadrimotor. Como resultado, o conjunto quadrimotor-garra pode transportar objetos de lugares de difícil acesso para lugares mais acessíveis ou até mesmo de lugares perigosos para uma área mais segura. A garra é capaz de agarrar um cubo de dimensões que vão até 1000 cm³. No entanto, ainda é necessário bastante habilidade do piloto para controlar o quadrimotor de forma efetiva e que consiga manter a garra estabilizada por tempo suficiente para segurar o objeto alvo.
O motor de passo possui uma velocidade angular baixa o que torna o movimento de abrir e fechar da garra lento, dificultando a estabilização do quadrimotor sobre a carga a ser transportada. Outro ponto a se melhorar é que a bateria de LiPo de 2200 mAh é utilizada para alimentar o quadrimotor, o Arduino e o motor de passo, dando autonomia total ao sistema algo em torno de 8 a 10 minutos.
Em trabalhos futuros, podem ser realizados ajustes na programação, adicionar ou trocar bibliotecas para acelerar o passo do NEMA 17. Bem como, todos os componentes podem ser
(b) (a)
organizados de uma melhor forma, para que haja mais espaço para uma segunda bateria ou até mesmo trocá-la por uma de maior capacidade. O sistema atual de engrenagens pode ser substituído por um que aumente o torque, e consiga transmitir mais força do motor de passo para as placas da garra.
REFERÊNCIAS
Abaunza, H., Cariño, J., Castillo, P., & Lozano, R. (Março de 2017). Dual Quaternion Modeling and Control of a Quad-rotor Aerial Manipulator. Journal of Intelligent & Robotic Systems, pp. 1-17. Fajardo, J., Ferman, V., Lemus, A., & Rohmer, E. (2017). An Affordable open-source multifunctional upper-limb prosthesis with intrinsic actuation. Workshop on Advanced Robotics and its Social Impacts (ARSO).
Kim, D., & Oh, P. Y. (Junho de 2018). Toward Lab Automation Drones for Micro-plate Delivery in High Throughput Systems. 2018 International Conference on Unmanned Aircraft Systems (ICUAS). Kruse, L., & Bradley, J. (Agosto de 2018). A Hybrid, Actively Compliant Manipulator/Gripper for Aerial Manipulation With a Multicopter. 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR).
Kyriakopoulos, K. J., Zisimatos, A. G., Liarokapis, M. V., & Mavrogiannis, C. I. (2014). Open source, affordable, modular, light-weight, underactuated robot hands. IEEE/RSJ International Conference on Intelligent Robots and Systems.
M. Grebenstein, A. A.-S. (Maio de 2011). The dlr hand arm system. IEEE International Conference, pp. 3175-3182.
Mellinger, D., Lindsey, Q., Shomin, M., & Kumar, V. (2011). Design, modeling, estimation and control for aerial grasping and manipulation. International Conference on Intelligent Robots and Systems.
Orsag, M., Korpela, C., Bogdan, S., & Oh, P. (2014). Valve turning using a dual-arm aerial manipulator. International Conference on Unmanned Aircraft Systems (ICUAS).
S. Kim, S. C. (2013). Aerial manipulation using a quadrotor with a two dof robotic arm. IEEE/RSj International Conference on Intelligent Robots and Systems.
Welch, C. R., Akbarisamani, S., Detweiler, C., & Nelson, C. A. (2015). Lightweight, low-cost, compliant grasper for uav-based pick-and-place operations. ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference