UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS GRADUAÇÃO EM ENGENHARIA CIVIL
CARLA BEATRIZ COSTA DE ARAÚJO
APLICAÇÃO DAS REDES NEURAIS ARTIFICIAIS DO TIPO PERCEPTRON NA ESTIMATIVA DE RECALQUES EM ESTACAS
CARLA BEATRIZ COSTA DE ARAÚJO
APLICAÇÃO DAS REDES NEURAIS ARTIFICIAIS DO TIPO PERCEPTRON NA ESTIMATIVA DE RECALQUES EM ESTACAS
Dissertação de Mestrado apresentada à Coordenação do Curso de Pós-Graduação em Engenharia Civil do Centro de Tecnologia da Universidade Federal do Ceará, como parte dos requisitos para obtenção do Título de Mestre em Engenharia Civil. Área de concentração: Geotecnia
Orientador: Profº Dr. Silvrano A. Dantas Neto
Dados Internacionais de Catalogação na Publicação Universidade Federal do Ceará
Biblioteca de Pós-Graduação em Engenharia - BPGE
A688a Araújo, Carla Beatriz Costa de.
Aplicação das redes neurais artificiais do tipo perceptron na estimativa de recalques em estacas / Carla Beatriz Costa de Araújo. – 2015.
227 f. : il. color., enc. ; 30 cm.
Dissertação (mestrado) – Universidade Federal do Ceará, Centro de Tecnologia, Departamento de Engenharia Hidráulica e Ambiental, Programa de Pós-Graduação em Engenharia Civil: Geotecnia, Fortaleza, 2015.
Área de Concentração: Geotecnia.
Orientação: Prof. Dr. Silvrano Adonias Dantas Neto. 1. Geotecnia. 2. Fundações. 3. Redes neurais. I. Título.
AGRADECIMENTOS
Agradeço primeiramente a Deus que me deu forças para chegar até aqui e nos momentos mais difíceis me confortou. Para Ele o meu maior agradecimento!
Agradeço ao pai amado e avô adorado, Seu Pedro Rodrigues Costa. O homem mais justo, bom e honrado que conheci. Deus me presenteou com o melhor avô que alguém poderia ter, e agora mesmo não estando mais ao nosso lado, permanece vivo dentro dos corações e nas lembranças.
A minha mãe, Sílvia Costa, minha melhor amiga, meu porto seguro, que sempre enfrentou tudo ao meu lado. A minha avó, Socorro Costa, que dedica até hoje sua vida à família, agradeço por todo carinho e amor. A minha querida Márcia, pois seu sorriso sempre vai se fazer presente em nossas vidas. A minha tia Mise Costa, que tem sido um exemplo de força e fé. A toda minha família, vocês fazem a vida muito mais bonita.
Ao companheiro e amigo de todas a horas, meu noivo Robson Roger, sua alegria e seu amor tornam tudo mais simples. Muito obrigado por me ajudar em todos os momentos, por me fazer sorrir até nas horas mais difíceis e sempre me incentivar.
Ao Prof. Silvrano por toda paciência e dedicação, não apenas no desenvolvimento deste trabalho, mas durante a minha formação em engenharia. Muito obrigado por acreditar em mim e por ter me ajudado a ser uma profissional.
Aos Profs. Alfran e Chagas por todo conhecimento transmitido durante o mestrado em Geotecnia. Aos Profs. Paulo José e Anderson Borghetti por aceitarem avaliar e contribuir neste trabalho.
Aos meus amigos da faculdade, alguns que hoje são meus colegas diário de trabalho e outros que mesmo longe sei que posso contar, como a minha amiga Flávia.
Aos meus amigos do trabalho, Verônica, Cláudia, Bruno, Robson, Danilo, Yuri, Tatiane, os dias ficam muito mais leves com a companhia de vocês. Verônica e Cláudia muito obrigado por toda a ajuda e incentivo durante todo o mestrado.
Aos colegas de turma do mestrado, em especial, Mariana, Amanda, Yan e aos que se agregaram durante nossos encontros, Neuza e Vivi.
“Os que se encantam com a prática sem a ciência são como os timoneiros que entram no navio sem timão nem bússola, nunca tendo certeza do seu destino”
RESUMO
A utilização das redes neurais artificiais (RNA) na estimativa de recalques em fundações profundas é comprovadamente uma ferramenta eficiente. Nos trabalhos de Amâncio (2013) e Silveira (2014), o emprego das RNA apresentou bons resultados para a previsão de recalques em estacas hélices contínuas, estacas cravadas metálicas e estacas escavadas. Porém, algumas estacas modeladas apresentaram comportamento muito distante dos resultados reais, onde os resultados da modelagem indicaram aumentos bruscos na rigidez do sistema solo-estaca. Nesta pesquisa, foi desenvolvido um modelo com uma rede neural do tipo perceptron multicamadas de forma a melhorar o desempenho dos modelos de Amâncio (2013) e Silveira (2014). Para desenvolvimento do trabalho, inicialmente foram feitas análises dos resultados de sondagens à percussão do tipo SPT e provas de carga estáticas das 199 estacas utilizadas no trabalho apresentado por Silveira (2014), fazendo-se uma avaliação da consistência das informações, com o objetivo de ter um conjunto mais heterogêneo e representativo. Após a realização de alterações, chegou-se a um conjunto com 141 estacas, totalizando 1.320 exemplos do tipo entrada-saída. Foram definidas como variáveis de entrada do modelo: o tipo de estaca, o comprimento da estaca, o diâmetro da estaca, o número representativo dos valores de NSPT ao
longo do fuste da estaca (denominada NF), o NSPT na ponta da estaca, profundidade da camada
de influência da carga em relação a ponta da estaca, o fator representativo das camadas de solo argiloso, o fator representativo das camadas de solo siltoso, o fator representativo das camadas de solo arenoso e a carga aplicada. Foram estudadas quatro diferentes formas de cálculo da variável de entrada NF, sendo estas: soma, média, soma ponderada e média ponderada. Com as variáveis de entrada apresentadas foram trabalhados modelos onde a variável de saída fosse o recalque da fundação profunda. A modelagem das RNA foi feita utilizando o programa QNET 2000, e foram realizados o treinamento e a validação de diferentes arquiteturas. O modelo que teve melhor desempenho apresentou coeficiente de correlação entre os recalques reais e os recalques modelados no treinamento de 0,99 e na validação de 0,98. Os resultados obtidos mostraram-se melhores que os de Amâncio (2013) e Silveira (2014), que na fase de validação, apresentaram correlações de 0,89 e 0,94 respectivamente. O modelo final deste trabalho possui uma arquitetura formada por 10 nós na camada de entrada, 34 neurônios distribuídos ao longo de quatro camadas ocultas e um neurônio na camada de saída (A:10-15-9-7-3-1), utilizando a média para cálculo do número representativo dos valores de NSPT ao longo do fuste da estaca.
ABSTRACT
The use of artificial neural networks (ANNs) in the estimation of settlements of deep foundations has proven to be an effective tool. In the works of Amancio (2013) and Silveira (2014), the use of ANNs had a good performance in settlement forecasting for continuous helical displacement piles, driven steel piles and bored piles. However, some modeled piles showed a very far behavior from the field results, and the modeling indicated sudden increases in the stiffness of the soil-pile system. In this study, a model with a perceptron-type multilayer neural network was developed in order to improve the performance of the models developed by Amancio (2013) and Silveira (2014). For the development of this work, firstly a careful analysis of the data used by Silveira (2014) – the results of percussion drillings (SPT) and static load tests on 199 piles – was performed, by making an assessment of the consistency of the information, aiming to get a more heterogeneous and representative set of training and validation. After all the changes, the authors got a set of 141 piles, totaling 1,320 input-output-type examples. The input variables of the model were defined as: pile input-output-type, pile length, pile diameter, representative number of the NSPT values along the pile shaft (called NF), value of
NSPT at the pile toe, depth of the layer of influence of the load in relation to the pile toe,
representative factor of clay soil layers, representative factor of silty soil layers, representative factor of sandy soil layers, and the applied load. Four different ways of calculating the NF input variable were studied, namely: sum, mean, weighted sum and weighted mean. With the presented input variables, models in which the output variable was the settlement of deep foundations were wrought. The modeling of ANNs was performed using the software QNET 2000, and the training and validation of different architectures were also conducted. The model that performed best showed correlation coefficients between the real settlements and the modeled settlements of 0.99 in the training span, and of 0.98 in the validation span. The results were better than those of Amancio (2013) and Silveira (2014), that showed correlations of 0.89 and 0.94, respectively, during the validation span. The final model of this work has an architecture that consists of 10 nodes in the input layer, 34 neurons distributed along four hidden layers and one neuron in the output layer (A:10-15-9-7-3-1), using the mean to calculate the representative number of NSPT values along the pile shaft.
LISTA DE FIGURAS
Figura 1.1 - Comparação entre a prova de carga real e os recalques gerados pelos modelos de
Amâncio (2013) e Silveira (2014) ... 20
Figura 2.1 – Curva carga x recalque ... 27
Figura 2.2 – Provas de carga encerradas em diferentes regiões ... 27
Figura 2.3 – Comportamento de estacas submetidas a carregamento axial de compressão e tração ... 29
Figura 2.4 – Curva carga x recalque a partir da combinação do fuste com a ponta: (a) estaca esbelta e (b) tubulão com base alargada ... 30
Figura 2.5 – Mecanismo de transferência de carga ... 31
Figura 2.6 – Gráficos da transferência de carga para a estaca escavada com D=40cm ... 33
Figura 2.7 – Neurônio Biológico ... 35
Figura 2.8 – Funcionamento do neurônio biológico ... 36
Figura 2.9 – Neurônio artificial ... 37
Figura 2.10 – Rede alimentada adiante com camada de neurônios ocultos ... 40
Figura 2.11 – Neurônio j pertencente a camada de saída ... 41
Figura 2.12 – Minimização da função de custo por ajustes sucessivos no vetor de pesos sinápticos. ... 43
Figura 2.13 – Neurônio j pertencente a camada oculta ... 45
Figura 2.14 – Parada antecipada baseada na validação ... 47
Figura 2.15 - Curvas carga aplicada x recalques reais e previstos pelo modelo RNA de Nejad et. al (2009), Poulos e Davis (1980), Vesic (1977), Das (1995), e o método não-linear t–z de Reese et. al (2006) ... 49
Figura 2.16 – Resultados dos recalques obtidos na prova de carga real e através do modelo de Amâncio (2013) para a Estaca 190 do tipo escavada ... 50
Figura 2.17 - Comparação entre modelos de previsão de recalque de Amâncio (2013), Silveira (2014) e modelo elastoplástico para a estaca teste ... 51
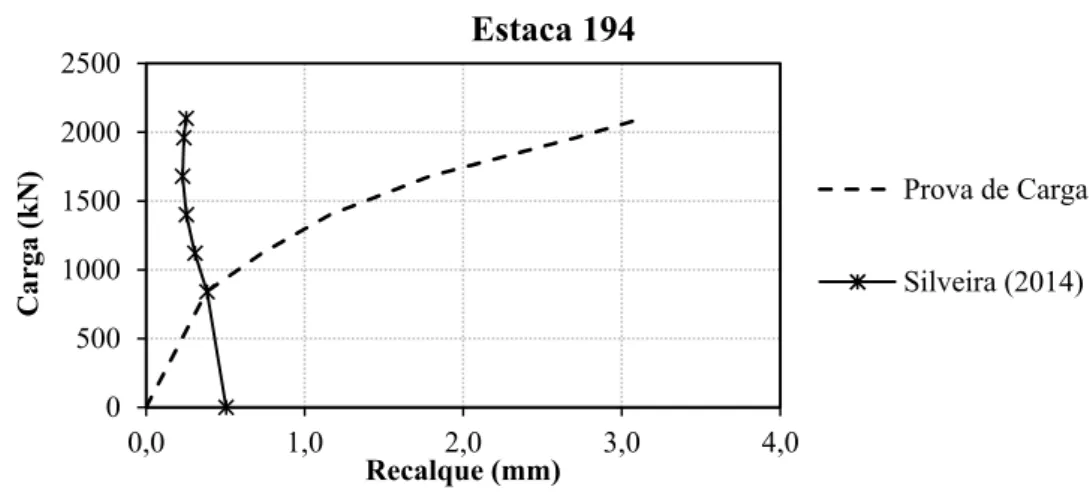
Figura 2.18 - Resultados dos recalques obtidos na prova de carga real e através do modelo de Silveira (2014) para a Estaca 194 do tipo escavada ... 52
Figura 3.1 – Resultados da prova de carga e dos modelos de Amâncio (2013) e Silveira (2014) para a Estaca 120 do tipo cravada metálica ... 55
Figura 3.2 – Análise da prova de carga da Estaca 101 ... 57
Figura 3.3 – Análise da prova de carga da Estaca 153 ... 57
Figura 3.5 – Prova de carga da Estaca 194 com detalhe do trecho inicial e os estágios de carga
eliminados ... 59
Figura 3.6 – Prova de carga da Estaca 156 e correções aplicadas ... 60
Figura 3.7 – Estacas com mesmos dados de entrada e provas de carga divergentes ... 61
Figura 3.8 – Estacas com mesmo dados de entrada e provas de carga semelhantes ... 61
Figura 3.9 - Estacas com mesmos dados de entrada e apenas uma prova de carga divergente 62 Figura 3.10 – Prova de carga da Estaca 199 ... 65
Figura 3.11 – Prova de carga da Estaca 186 ... 66
Figura 3.12 – Distribuição dos dados: (a) quantidade de estacas (b) quantidade de exemplos entrada-saída do conjunto inicial – Silveira (2014) ... 67
Figura 3.13 – Distribuição dos dados: (a) quantidade de estacas (b) quantidade de exemplos entrada-saída do conjunto final... 67
Figura 3.14 – Distribuição inicial e final dos valores dos comprimentos das estacas hélices contínuas ... 68
Figura 3.15 – Distribuição inicial e final dos valores dos diâmetros das estacas hélices contínuas ... 69
Figura 3.16 - Distribuição inicial e final dos valores dos comprimentos das estacas cravadas metálicas ... 69
Figura 3.17 - Distribuição inicial e final dos valores dos diâmetros das estacas cravadas metálicas ... 69
Figura 3.18 - Distribuição inicial e final dos valores dos comprimentos das estacas escavadas ... 70
Figura 3.19 - Distribuição inicial e final dos valores dos diâmetros das estacas escavadas .... 70
Figura 3.20 - Distribuição inicial e final dos valores comprimentos de todas as estacas ... 70
Figura 3.21 - Distribuição inicial e final dos valores dos diâmetros de todas as estacas ... 71
Figura 3.22 – Percentual de estacas executadas em cada tipo solo: (a) Hélice Contínua, (b) Cravada Metálica, (c) Escavada e (d) Total ... 72
Figura 3.23 – Deformação (máx/D) das estacas executadas em solos predominantemente argilosos ... 73
Figura 3.24 - Deformação (máx/D) das estacas executadas em solos predominantemente granulares (siltosos e arenosos) ... 74
Figura 3.25 – Seção transversal para estacas cravadas metálicas ... 77
Figura 3.26 – Determinação da variável NP e cálculo da variável NF ... 78
Figura 3.28 – Estratigrafia do solo ... 81
Figura 4.1 - Evolução das correlações com número de iterações na fase de treinamento e validação do modelo com arquitetura A:10-14-8-4-2-1 ... 88
Figura 4.2 - Evolução das correlações com número de iterações na fase de treinamento e validação do modelo com arquitetura A:10-14-8-4-2-1 após modificação ... 89
Figura 4.3 – Comparação dos recalques do modelo com arquitetura A:10-14-8-4-2-1 após modificação e os recalques reais para as etapas de (a) treinamento (b) validação ... 89
Figura 4.4 – Comparação entre e a prova de carga real e o modelo ... 90
Figura 4.5 – Exemplo da aplicação do fator de correção ... 92
Figura 4.6 - Resultado da prova de carga real e gerados pelos modelos – Estaca 21 ... 93
Figura 4.7 - Resultado da prova de carga real e gerados pelos modelos – Estaca 72 ... 93
Figura 4.8 - Resultado da prova de carga real e gerados pelos modelos – Estaca 119 ... 94
Figura 4.9 - Arquitetura do modelo final para estimar recalques em fundações profundas ... 95
Figura 4.10 - Evolução das correlações com número de iterações na fase de treinamento e validação do modelo final com arquitetura A:10-15-9-7-3-1 ... 96
Figura 4.11 – Correlação dos recalques do modelo final com arquitetura A:10-15-9-7-3-1 e os recalques reais (a) Treinamento (b) Validação ... 96
Figura 4.12 – Contribuição das variáveis de entrada para o modelo final de previsão de recalque em fundações profundas fornecidas pelo programa QNET2000 ... 97
Figura 4.13 – Contribuição de cada uma das partes que compõe o sistema mecanismo de transferência de carga no modelo final de previsão de recalques ... 98
Figura 4.14 – Caracterização do solo a partir do ensaio SPT (Estaca Teste) ... 102
Figura 4.15 – Estaca teste ... 105
Figura 4.16 – Comparação modelos - Estaca hélice contínua ... 106
Figura 4.17 – Comparação entre modelos - Estaca cravada metálica ... 106
LISTA DE TABELAS
Tabela 3.1 – Estágios de carga eliminados ... 59
Tabela 3.2 – Análise da duplicidade dos dados de entrada ... 62
Tabela 3.3 – Estágio de carga igual e recalques associados diferentes ... 65
Tabela 3.4 – Faixas de deformação de acordo com a mobilização da carga de atrito lateral para estacas executadas em solos predominantemente argilosos ... 73
Tabela 3.5 - Faixas de deformação de acordo com a mobilização da carga de atrito lateral para estacas executadas em solos predominantemente granulares (siltosos e arenosos) ... 74
Tabela 3.6 – Aquisição dos dados utilizados no modelo ... 76
Tabela 3.7 – Valores para a variável tipo de estaca (T) ... 76
Tabela 3.8 – Valores máximos e mínimos das variáveis envolvidas na modelagem com utilização das redes neurais artificiais ... 82
Tabela 4.1- Resultados das correlações obtidas para NF calculado como a soma do NSPT ao longo do fuste ... 90
Tabela 4.2- Arquiteturas e correlações para treinamento e validação ... 91
Tabela 4.3- Melhores arquiteturas para cada uma das metodologias de cálculo de NF ... 92
Tabela 4.4- Valores dos pesos sinápticos (wkj) e dos limiares (bk) entre a camada de entrada e a primeira camada intermediária do modelo de previsão de recalque em fundações profundas 99 Tabela 4.5- Valores dos pesos sinápticos (wkj) e dos limiares (bk) entre a primeira e a segunda camada intermediária do modelo de previsão de recalque em fundações profundas ... 100
Tabela 4.6- Valores dos pesos sinápticos (wkj) e dos limiares (bk) entre a segunda e a terceira camada intermediária do modelo de previsão de recalque em fundações profundas ... 100
Tabela 4.7- Valores dos pesos sinápticos (wkj) e dos limiares (bk) entre a terceira e a quarta camada intermediária do modelo de previsão de recalque em fundações profundas ... 101
Tabela 4.8- Valores dos pesos sinápticos (wkj) e dos limiares (bk) entre a quarta camada intermediária e a camada de saída do modelo de previsão de recalque em fundações profundas ... 101
Tabela 4.9 – Variáveis de entrada normalizadas ... 102
Tabela 4.10 – Saídas dos neurônios da primeira camada oculta ... 103
Tabela 4.11 - Saídas dos neurônios da segunda camada oculta ... 103
Tabela 4.12 – Saídas dos neurônios da terceira camada oculta ... 104
LISTA DE SÍMBOLOS, ABREVIATURA E SIGLAS
Constante momento
{dl}
Conjunto de saídas desejadas para as L-exemplos existentes no conjunto de dados de treinamento
{wkj(n)} Ajuste do vetor de peso sináptico {wkj(n)} na época n
{w} Vetor dos pesos sinápticos que ligam o neurônio k ao vetor de entrada {x}
{x} Sinais de entrada
{xl}
Conjunto de entradas para os L-exemplos existentes no conjunto de dados de treinamento
∑ Lareia Somatório das espessuras das camadas de solo arenoso em contato com
fuste da estaca
∑ Largila Somatório das espessuras das camadas de solo argiloso em contato com
fuste da estaca
∑ Lsilte Somatório das espessuras das camadas de solo siltoso em contato com fuste
da estaca
A:10:15:9:7:3:1 Arquitetura do modelo proposto
A, B Dimensões do perfil de estacas cravadas de seção não circular
Ar Fator representativo das camadas de solo arenoso ao longo do comprimento da estaca
Arg Fator representativo das camadas de solo argiloso ao longo do comprimento da estaca
bk Bias ou limiar
C++ Linguagem de Programação
Cov(X,Y) Covariância entre duas variáveis aleatórias X e Y
CPT Ensaio do cone
d Profundidade da camada de influência da carga em relação a ponta da estaca
dk Saída desejada para o neurônio k
k(i) Gradiente local do neurônio yk(i) no i-ésimo exemplo do conjunto de
treinamento
DP(X) Desvio padrão de X
DP(Y) Desvio padrão de Y
0 Fator de correção do modelo
E Módulo de Elasticidade
e Número de Euler
E(n) Erro quadrático instantâneo
ek Sinal de erro do neurônio k
Emed(n) Erro quadrático médio
f(.) Função de ativação do neurônio
Taxa de aprendizagem
Java Linguagem de Programação
ks Coeficiente de empuxo de terra
L Comprimento da estaca
n Passo de tempo discreto (época)
Coeficiente de Poisson
n1 Quantidade dos NSPT correspondente ao peso de 0,6
n2 Quantidade dos NSPT correspondente ao peso de 0,3
n3 Quantidade dos NSPT correspondente ao peso de 0,1
NF Número representativo dos valores de NSPT ao longo do fuste da estaca (golpes/30cm)
NSPT Soma do número de golpes necessários para penetrar o amostrador nos
últimos 30 cm de solo
P Carga aplicada no topo da estaca
Conjunto de dados de treinamento utilizados para modelagem de rede
neural artificial
Pi
Recalque
R Coeficiente de correlação
máx Recalque máximo obtido na prova de carga
RNA Redes Neurais Artificiais
'0 Tensão efetiva no repouso
S1 Somatório dos NSPT correspondentes a primeira metade do comprimento
da estaca
S2 Somatório dos NSPT correspondentes a 25% do comprimento da estaca,
sendo estes consecutivos a S1
S3 Somatório dos NSPT restantes consecutivos a S2, desconsiderando NP
Sil Fator representativo das camadas de solo siltoso ao longo do comprimento da estaca
SPT Sondagem à percussão de simples reconhecimento
'v Tensão efetiva vertical
T Tipo de estaca
uk Saída do combinador linear
VBA Visual Basic for Applications
vk Campo local induzido
wkj Conjunto de sinapses ou elos de conexão
X Variável a ser normalizada
Xmáx Valor máximo da variável a ser normalizada
Xmín Valor mínimo da variável a ser normalizada
SUMÁRIO
1. INTRODUÇÃO ... 19
1.1. Motivação da Pesquisa ... 19
1.2. Objetivos ... 21
1.3. Metodologia ... 21
1.4. Escopo do Trabalho ... 22
2. REVISÃO BIBLIOGRÁFICA ... 24
2.1. Fundações do Tipo Estacas ... 24
2.2. Provas de Carga ... 25
2.3. Mecanismos de Transferência de Carga ... 28
2.4. Redes Neurais Artificiais ... 33
2.4.1. O Neurônio Biológico ... 34
2.4.2. O Neurônio Artificial ... 36
2.4.3. Breve Histórico ... 38
2.4.4. Perceptron Multicamadas ... 39
2.4.5. Treinamento e Validação ... 46
2.5. Aplicações das RNA na Estimativa de Recalques ... 47
2.6. Considerações Parciais ... 52
3. METODOLOGIA ... 54
3.1. Análise e Tratamento dos Dados ... 54
3.1.1. Obtenção dos Dados ... 55
3.1.2. Análise dos Dados ... 56
3.1.3. Definição das Variáveis de Entrada ... 75
3.1.4. Normalização das Variáveis do Modelo ... 82
3.2. Modelagem com as RNA ... 83
3.2.1. Descrição do Programa ... 83
3.3. Considerações Parciais ... 85
4. RESULTADOS ... 87
4.1. Treinamento e Validação ... 87
4.2. Definição do Modelo ... 91
4.3. Aplicação – Estaca Teste ... 101
4.4. Comparação entre Modelos ... 105
4.5. Considerações Parciais ... 107
5. CONCLUSÕES E SUGESTÕES PARA PESQUISAS FUTURAS ... 109
5.1. Conclusões ... 109
5.2. Sugestões para pesquisas futuras ... 112
REFERÊNCIAS BIBLIOGRÁFICAS ... 114
APÊNDICE A ... 118
APÊNDICE B ... 123
APÊNDICE C ... 162
APÊNDICE D ... 187
1. INTRODUÇÃO
Neste capítulo são apresentadas: a motivação da pesquisa, a descrição dos objetivos gerais e específicos que norteiam o desenvolvimento deste trabalho, a metodologia empregada e a estruturação da dissertação.
1.1. Motivação da Pesquisa
A estimativa dos recalques em fundações profundas é um problema complexo e multivariado, pois muitas são as incertezas associadas aos fatores que afetam este fenômeno. Segundo Nejad et. al (2009), esses fatores incluem a distribuição da tensão aplicada, o histórico de tensão-deformação do solo, a compressibilidade do solo e a dificuldade na obtenção de parâmetros de resistência e de deformabilidade do solo.
Para um projeto de fundações racional, seguro e econômico é preciso prever os recalques que os elementos irão sofrer (Barros, 2012). Considerando a importância e a dificuldade da previsão de recalques em fundações profundas, as redes neurais artificiais (RNA) surgem como uma alternativa para o desenvolvimento de modelos que possam prever com grau de precisão adequado a magnitude dos deslocamentos gerados pela aplicação de uma carga no sistema estaca-solo.
Segundo Kóvacs (2002), as redes neurais artificiais constituem genuinamente uma teoria para o estudo de fenômenos complexos. Nejad et. al (2009), Amâncio (2013) e Silveira (2014) comprovaram a eficiência das RNA na previsão de recalques em fundações profundas em seus trabalhos.
Nejad et al. (2009) desenvolveram um modelo a partir das RNA para estimar recalques em fundações profundas utilizando dados de sondagem à percussão SPT. Nesse trabalho foi usado um banco de dados com 1.013 exemplos (76 estacas isoladas). Após a definição do modelo, foram comparadas as previsões obtidas pelas RNA com os resultados de métodos teóricos tradicionais, constatando que os recalques calculados com o modelo das RNA foram mais próximos dos valores reais do que com os métodos tradicionais.
comportamento do recalque nas fundações profundas e fornecer a magnitude dos recalques para qualquer valor de carga vertical de modo satisfatório. Para o melhor modelo de Amâncio (2013) foi obtida uma correlação entre os valores reais e os valores modelados de 0,89 na etapa de validação.
Silveira (2014) empregou o mesmo conjunto de dados de Amâncio (2013) para modelagem com as RNA, porém acrescentou a estes dados os exemplos considerando que para carga nula o recalque deve ser zero. Foram introduzidas também novas variáveis de entrada ao modelo que não foram utilizadas por Amâncio (2013), estas variáveis representavam a estratigrafia do solo e a distância da ponta da estaca até a camada incompressível. Os resultados do modelo de Silveira (2014) mostram-se melhores que os de Amâncio (2013), obtendo-se uma correlação de 0,94 na etapa de validação.
Apesar de os modelos de Amâncio (2013) e Silveira (2014) apresentarem boas correlações entre os valores calculados e os valores reais, algumas estacas modeladas apresentaram comportamento como indicado na Figura 1.1. Os resultados demonstram a necessidade de aprimoramento dos modelos utilizando as redes neurais artificias.
Nesta pesquisa são estudados novos modelos com base nos resultados de Amâncio (2013) e Silveira (2014) e com mesmo banco de dados, procurando desenvolver um modelo mais eficaz de previsão de recalques utilizando as RNA.
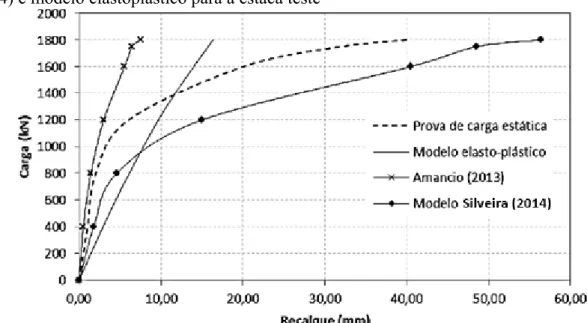
Figura 1.1 - Comparação entre a prova de carga real e os recalques gerados pelos modelos de Amâncio (2013) e Silveira (2014)
Fonte: Adaptado de Silveira, 2014 0
10 20 30 40 50 60 70
0,0 10,0 20,0 30,0 40,0
C
ar
ga
(k
N
)
Recalque (mm) Estaca 168
Prova de Carga
Silveira (2014)
1.2. Objetivos
Esta pesquisa tem por objetivo geral desenvolver um modelo de previsão de recalques em fundações profundas que apresente melhor desempenho que os modelos desenvolvidos por Amâncio (2013) e Silveira (2014).
Como objetivos específicos deste trabalho podem ser citados:
Estudar os mecanismos de geração de recalques em fundações profundas;
Melhorar o entendimento das redes neurais artificiais em relação aos mecanismos que influenciam os recalques;
Avaliar a consistência dos dados utilizados na elaboração do modelo de Silveira (2014);
Estudar diferentes formas de consideração dos resultados de sondagem à percussão SPT como variável de entrada do modelo;
Estudar arquiteturas alternativas àquelas utilizadas por Amâncio (2013) e Silveira (2014);
Avaliar o desempenho dos modelos apresentados por Amâncio (2013) e Silveira (2014);
Desenvolver uma ferramenta que possa ser utilizada na prática da engenharia de fundações para a estimativa de recalques em fundações a partir de informações correntes (sondagens à percussão do tipo SPT);
Contribuir para o desenvolvimento de metodologias de projeto em fundações profundas.
1.3. Metodologia
Neste trabalho inicialmente foi realizada uma pesquisa bibliográfica buscando compreender melhor o mecanismo de geração de recalques em estacas quando submetidas a um carregamento. Foram abordados também os principais conceitos sobre as redes neurais artificiais, que permitiram sua aplicação como ferramenta de previsão de recalques.
O conjunto de dados final foi separado aleatoriamente em dois conjuntos: treinamento e validação. Através do programa QNET 2000 realizou-se o treinamento e a validação de diferentes modelos. Na etapa de treinamento, são feitos ajustes na rede de forma que sejam minimizados os erros entre a saída gerada pela rede e o valor real. Já na etapa de validação é testada a capacidade de generalização da rede, nesta etapa a rede é submetida a estímulos a qual nunca havida sido submetida.
A definição do modelo final foi feita com base na correlação entre os valores reais e os valores modelados.
1.4. Escopo do Trabalho
Esta dissertação está estruturada em cinco capítulos. No primeiro capítulo são apresentados: a motivação da realização do trabalho, a descrição dos objetivos gerais e específicos, e o escopo do trabalho.
No segundo capítulo apresenta-se a revisão bibliográfica que fundamenta todo o trabalho, sendo abordados os seguintes assuntos: fundações profundas, dando enfoque aos recalques, abordando os principais fatores que influenciam este fenômeno, e as redes neurais artificiais, sendo mostradas as informações sobre o desenvolvimento, os princípios de funcionamento, as formulações, etc.
A metodologia utilizada na pesquisa é apresentada no terceiro capítulo. São descritas detalhadamente: as etapas de desenvolvimento do trabalho, a análise e o tratamento dos dados, as etapas da modelagem e o estabelecimento do modelo.
No quarto capítulo são apresentados os resultados obtidos através da modelagem utilizando as redes neurais artificiais, os parâmetros fornecidos pelo modelo final e a comparação com outros modelos.
As conclusões da pesquisa indicando os resultados obtidos e os objetivos alcançados, bem como as sugestões para pesquisas futuras são apresentadas no quinto capítulo. Por último, as referências bibliográficas citadas no texto e os apêndices são apresentados.
No Apêndice A os resultados das provas de carga em estacas instaladas no mesmo maciço de solo (mesma estratigrafia), com mesmos estágios de carga, mas com recalques diferentes (duplicidade dos dados de entrada) são apresentados.
No Apêndice C é feita a comparação entre os modelos com diferentes formas de consideração dos resultados de sondagem à percussão SPT.
No Apêndice D são mostradas as planilhas que exemplificam a aplicação do modelo para uma estaca-teste.
2. REVISÃO BIBLIOGRÁFICA
Neste capítulo são apresentados os aspectos mais relevantes ao tema da pesquisa, permitindo a consolidação de uma base teórica que possa auxiliar no desenvolvimento da metodologia, na análise dos resultados e nas conclusões finais do trabalho. Desta forma, são considerados aspectos relacionados às fundações em estacas, às provas de carga, aos mecanismos de transferência de carga, às redes neurais artificiais e às aplicações das RNA na estimativa de recalques.
São apresentadas: algumas definições com relação as fundações profundas do tipo estacas, a utilização de provas de carga e os resultados esperados, os mecanismos de transferência de carga que elucidam o entendimento do comportamento das estacas quando submetidas a um carregamento axial.
Para o entendimento das redes neurais artificiais (RNA), são mostradas suas características, histórico, formulação, descrição dos seus parâmetros e a metodologia de aplicação.
Por fim, apresentam-se modelos que utilizam as redes neurais artificiais na previsão de recalques, indicando os resultados obtidos, os problemas encontrados e as suas limitações.
2.1. Fundações do Tipo Estacas
Segundo a NBR 6122/2010, as fundações profundas são aquelas que transmitem a carga ao terreno, ou pela base (resistência de ponta), ou por sua superfície lateral (resistência de fuste), ou por uma combinação das duas. Sua ponta ou base está implantada a uma profundidade superior ao dobro da sua menor dimensão em planta, e no mínimo a 3m.
Terzaghi et. al (1996) explicam que a escolha por projetar uma estrutura com fundação profunda, ao invés de uma fundação superficial, é feita se o solo imediatamente abaixo da superfície do terreno não tem capacidade de carga adequada, ou se uma estimativa dos custos indica que uma fundação profunda pode ser a mais econômica.
As estacas são elementos de fundação profunda executadas inteiramente por equipamentos ou ferramentas, sem que, em qualquer fase de sua execução, haja descida de operário (NBR 6122/2010).
projetos de fundações profundas é feita avaliando apenas a capacidade de suporte das fundações por métodos empíricos ou semi-empíricos, ou seja, ainda persiste a total indiferença quanto ao cálculo de recalques e a transferência de carga. Albuquerque et. al (2001) citam que a estimativa do recalque do topo de uma estaca é muito importante para qualquer projeto de fundações, pois a carga de trabalho é também função dos recalques que a estrutura pode tolerar.
De acordo com Benegas (1993), a visão completa do comportamento de uma estaca é conseguida analisando-se a curva carga x recalque, que pode ser obtida através da realização de provas de carga.
2.2. Provas de Carga
Albuquerque (1996) justifica a execução de provas de carga uma vez que, existe a natural dificuldade em conhecer as propriedades do solo onde as fundações serão construídas, as alterações das condições iniciais provocadas pela execução das estacas e o comportamento complexo do conjunto estaca-solo.
A prova de carga estática é a técnica mais adequada e confiável para a determinação do comportamento de fundações profundas sob carregamento axial (MILITISKY,1991). O ensaio reproduz de forma muito próxima as condições de funcionamento a que a estaca será submetida (PÉREZ, 2014). A prova de carga é um ensaio que possibilita verificar por meios diretos aspectos relevantes, como: capacidade de carga do solo, deslocamentos do elemento de fundação e transferência de carga em profundidade quando realizado em estacas instrumentadas (BESSA, 2005).
A NBR 6122/2010 obriga a realização de provas de carga estáticas em estacas, para avaliar o desempenho das fundações. Sendo o desempenho considerado satisfatório quando forem satisfeitas as condições de fator se segurança de no mínimo igual a 2,0 e de recalque admissível pela estrutura na carga de trabalho.
As provas de carga devem ser conduzidas em observância aos procedimentos prescritos pela norma NBR 12.131/2006.
De acordo com Fleming et al. (2008), os objetivos da prova de carga estática são:
Determinar a capacidade de carga do sistema solo-estaca e compará-la com a estimativa de projeto;
Avaliar as parcelas da carga aplicada resistidas por atrito lateral e por resistência de ponta da estaca, no caso de estacas instrumentadas;
Determinar a rigidez do sistema solo-estaca sob a carga de projeto;
Determinar o recalque correspondente à uma determinada carga aplicada. Quando uma prova de carga é realizada, convenciona-se a apresentar seus resultados, através de uma curva carga x recalque, que mostra o valor dos deslocamentos medidos na cabeça da estaca (PÉREZ, 2014). Segundo Schulze (2013), estes deslocamentos são resultados das deformações elásticas do material da estaca e das deformações elásticas e plásticas do solo.
A forma da curva carga x recalque será resultado da interação solo-estaca, que ocorre através do atrito lateral e da ponta, e se constitui na medida final do comportamento da estaca vertical isolada sujeita a ação de carga axial de compressão (CORRÊA, 1988; BENEGAS, 1993).
Amann (2010) afirma que a forma da curva varia com a rigidez do sistema estaca-solo. Segundo Décourt (1996), à medida que o recalque aumenta, há uma diminuição da rigidez do sistema. O gráfico da curva carga x recalque resultante de uma prova de carga sobre estaca individual (Figura 2.1) pode ser dividido em três regiões (NIYAMA et. al, 1998; HIRANY e KULHAWY, 1989):
Região I (Linear Inicial): quase proporcionalidade entre a carga e o recalque, ou seja, a rigidez do sistema solo-estaca é quase constante. É a região de deformações elásticas, utilizada para determinar o coeficiente de recalque;
Região II (Curva de Transição): ocorrência de deformações plásticas, havendo uma diminuição da rigidez do sistema estaca-solo até que seja atingida a ruptura. Nesta região a velocidade de carregamento influi muito sobre os recalques;
Figura 2.1 – Curva carga x recalque
Fonte: Vargas, 1977 apud Melo, 2009
Magalhães (2005) esclarece que, quando se interrompe a prova de carga num trecho ainda elástico, conforme indicado na Figura 2.2 (a), o valor da carga de ruptura fica difícil de ser determinado corretamente. Quando se estende a prova de carga até atingir o início da plastificação do sistema estaca-solo (Figura 2.2(b)), pode-se realizar a estimativa da carga última. Para uma prova de carga em que um pequeno acréscimo de carga resultar em grandes deformações, como exemplificado na Figura 2.2 (c), a carga última fica claramente evidenciada, não necessitando de métodos de extrapolação.
Figura 2.2 – Provas de carga encerradas em diferentes regiões
Fonte: Magalhães, 2005
2.3. Mecanismos de Transferência de Carga
O comportamento de uma estaca desde o início do seu carregamento até a ruptura é elucidado através do estudo dos mecanismos de transferência de carga da estaca para o solo. Este estudo também é chamado de interação estaca-solo (VELLOSO e LOPES, 2010).
Amann (2010) define o fenômeno de transferência de carga como a deformação elástica do material da estaca, que durante o processo de carga e descarga interage por atrito com solo ao longo comprimento do fuste. Durante esse processo de carregamento e descarregamento, o solo em contato com a estaca sofre deformações elásticas e plásticas.
Para Nogueira (2004), a transferência de carga no sistema solo-estaca é o equilíbrio entre as forças solicitantes e resistentes ao longo da estrutura. Parte da força normal atuante na seção da estaca é absorvida pelo solo, esta por sua vez vai diminuindo de intensidade ao longo da profundidade.
Quando uma estaca é submetida a um carregamento, a transmissão das cargas aplicadas ocorre através da ponta da fundação (tensões normais) e pelo fuste (tensões cisalhantes). Sendo assim, a carga total é decomposta em duas parcelas, e o problema básico da análise da transferência de cargas no sistema estaca-solo consiste em estabelecer o mecanismo segundo o qual ocorre esta distribuição de esforços (BENEGAS, 1993).
O comportamento de estacas submetidas a situações de carregamento axial de compressão (Caso A) e tração (Caso B) é ilustrado na Figura 2.3. Estes casos são analisados por Fellenius (1984), considerando as tensões verticais impostas ao fuste da estaca. Para a pesquisa desta dissertação o interesse é apenas no Caso A, de estacas submetidas à compressão, em que as deformações das camadas de solo ocorrem no mesmo sentido de aplicação da carga (para baixo), conforme mostrado na Figura 2.3 (a), e ocorre também o desenvolvimento de uma resistência para cima ao longo do fuste da estaca. A compressão na estaca teoricamente, com base no efeito do coeficiente de Poisson, aumenta o diâmetro, isto faz com que o coeficiente de empuxo de terra (ks) também aumente. Além disso, as transferências de carga tendem a
Figura 2.3 – Comportamento de estacas submetidas a carregamento axial de compressão e tração
(a) (b)
Fonte: Fellenius, 1984 apud Bessa, 2005
A relação entre a parcela de carga que é absorvida pelo fuste, e a parcela absorvida pela ponta, dependerá da estratigrafia do terreno, das características geotécnicas dos materiais, das dimensões da estaca, do processo executivo da fundação e da magnitude da carga aplicada. Para casos onde as camadas superiores oferecerem baixas resistências, a carga lateral pode tornar-se desprezível em decorrência das tensões cisalhantes desenvolvidas ao longo do fuste. Entretanto no caso de camadas inferiores do maciço apresentarem elevadas resistências, os deslocamentos da estaca podem não ser suficientes para mobilizar as tensões cisalhantes ao longo da estaca (BENEGAS, 1993).
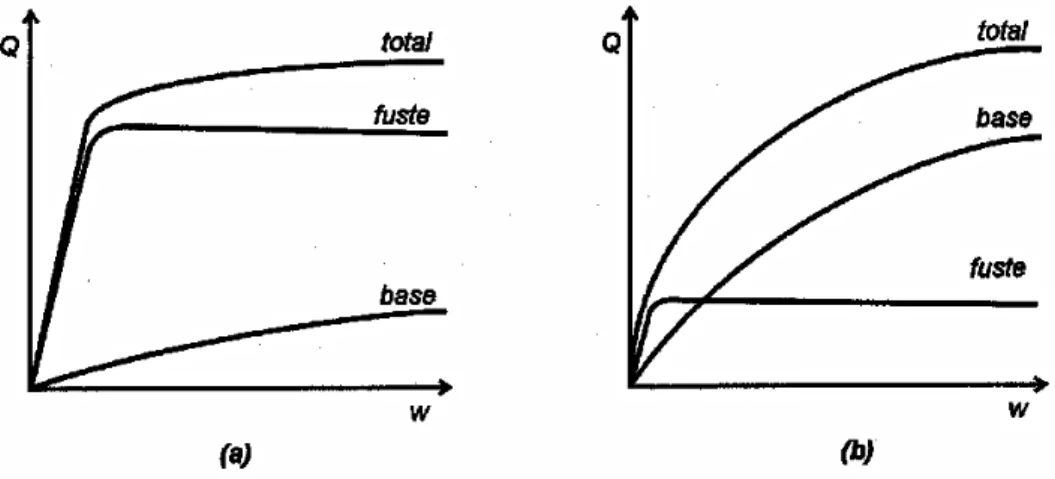
Figura 2.4 – Curva carga x recalque a partir da combinação do fuste com a ponta: (a) estaca esbelta e (b) tubulão com base alargada
Fonte: Burland e Cooke, 1974 apud Nienov, 2006
Murthy (2002) descreve o mecanismo de transferência de carga, considerando uma estaca carregada até a ruptura (Figura 2.5(a)), onde o aumento de carga no topo da estaca é feito de maneira gradual. Medindo-se o recalque na parte superior da estaca em cada estágio de carregamento após a condição de equilíbrio ser atingido, uma curva de carga x recalque como mostra a Figura 2.5 (c) é obtida. A distribuição de cargas conforme a Figura 2.5 (b), ao longo da estaca, pode ser determinada em diferentes fases de carregamento e pode ser obtida no caso de estacas instrumentadas.
Nos estágios iniciais, quando uma carga P1 atua sobre o topo da estaca, a carga
vertical no nível do solo também é P1. Porém, no nível Al a carga vertical é zero (Figura 2.5(b)).
A carga total P1 é distribuída como carga de atrito lateral, ao longo comprimento da estaca L1.
Abaixo da seção A1 até a ponta da estaca não há transferência de carga.
Aumentando a carga para P2, a carga vertical na ponta da estaca continua a ser zero.
Neste caso, a carga total P2 é distribuída como carga de atrito ao longo de todo o comprimento
da estaca L. Quando a carga aplicada na estaca é maior do que P2, uma parte dessa carga é
transferida para o solo na base como carga de ponta e o restante é transferido para o solo em torno do fuste da estaca.
Com o aumento da carga P aplicada no topo da estaca, tanto a carga de atrito no fuste quanto a carga de ponta continuam a aumentar e, a partir do momento que a carga de atrito atinge um valor ultimo PF, a um nível de carga especifico Pm no topo, qualquer outro incremento
de carga adicionada a Pm não vai mais aumentar o valor da carga absorvida pelo atrito lateral
ao longo do fuste PF. No entanto, a carga de ponta PP continuará aumentando até que o solo
Em geral, a mobilização do atrito lateral é frequentemente atribuída ao trecho linear inicial da curva carga x recalque (trecho de deformações elásticas), logo após são iniciadas as deformações plásticas associadas a mobilização da resistência de ponta (LANGONE, 2012). Na Figura 2.5 (c) observa-se que maior parte da mobilização do atrito lateral ocorre no trecho de deformações elásticas.
Figura 2.5 – Mecanismo de transferência de carga
Fonte: Murthy, 2002 apud Silveira, 2014
Conforme apresentado na Figura 2.5, o movimento vertical (deslocamento) da estaca necessário para mobilizar a resistência de ponta é muito maior do que o necessário para mobilizar o atrito lateral, assim sendo, a resposta do solo ao carregamento do fuste é mais rígida do que ao carregamento da base da estaca (VELLOSO e LOPES, 2010).
desenvolver-se plenamente com pequenos deslocamentos, porém, a reação de ponta necessita de deslocamentos maiores para mobilizar-se.
Na literatura há valores para a deformação necessária para o pleno desenvolvimento da carga de atrito lateral. De acordo com os trabalhos de Décourt et. al (1998) e Poulos e Davis (1980) apud Langone (2012), para argilas a faixa de deformação é de 0,5% a 2% do diâmetro da estaca e para solos granulares é de 1% a 3% do diâmetro da estaca. Nienov (2006) cita que para mobilizar toda a resistência lateral em estacas escavadas de grande diâmetro, são requeridos deslocamentos entre 0,5% e 1% do diâmetro do fuste, usualmente menor que 10mm. Para mobilizar a resistência de ponta, precisam ocorrer deslocamentos da ordem de 5% a 10% (às vezes até 20% do diâmetro da ponta da estaca).
Pérez (2014) analisou o comportamento de estacas escavadas ao trado com três diferentes diâmetros, instrumentadas, submetidas a provas de carga estática. Foram realizadas três provas de carga estáticas do tipo lentas, instrumentadas com extensômetros elétricos no topo e na ponta de maneira a se obter os dados do mecanismo de transferência de carga em profundidade. A autora verificou em que nas estacas escavadas do seu trabalho, a transferência de carga ocorreu em maior parte pelo atrito lateral. A pouca mobilização da ponta foi atribuída à baixa capacidade do solo na região do estudo, além de que seriam necessários deslocamentos consideráveis do topo da estaca para que a ponta fosse mobilizada plenamente. A baixa resistência de ponta também foi atribuída ao processo executivo da estaca que altera o estado natural da camada em que está apoiada.
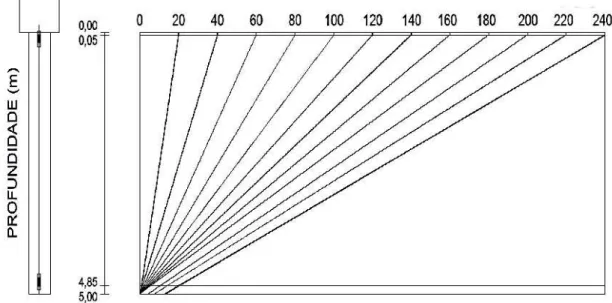
A Figura 2.6 exibe um dos resultados obtidos na pesquisa, para a estaca de diâmetro D = 40cm. São apresentados os gráficos da transferência de carga para cada um dos estágios de carga da prova de carga estática. Para a estaca indicada, a carga de ponta começou a ser mobilizada nos três últimos estágios, com uma mobilização da ordem de 3.7% da carga aplicada no topo.
há melhoramento da ponta, a capacidade de carga da ponta é perdida devido as modificações no solo decorrentes do processo executivo.
Figura 2.6 – Gráficos da transferência de carga para a estaca escavada com D=40cm
Fonte: Pérez, 2014
2.4. Redes Neurais Artificiais
As redes neurais artificiais, segundo Haykin (2001), são processadores maciçamente paralelos distribuídos e constituídos de unidades de processamento simples, que têm a propensão natural para armazenar conhecimento experimental e torná-lo disponível para o uso. Frente aos procedimentos estatísticos usuais, as redes neurais artificiais não apresentam um conjunto de coeficientes, ou parâmetros, apesar de estes serem incluídos no modelo (DANTAS NETO, 2004). Assim, no ponto de vista matemático uma rede neural artificial pode ser entendida como um conjunto de nós organizados em camadas sucessivas, de forma análoga à rede neural mais poderosa conhecida, o cérebro humano.
O uso de redes neurais oferece as seguintes propriedades úteis e capacidades (HAYKIN, 2001):
Não-linearidade: propriedade muito importante, principalmente se o mecanismo físico que gera o sinal de entrada for inerentemente não linear;
Adaptabilidade: capacidade inata das redes neurais adaptar seus pesos sinápticos quando submetidas a modificações do meio ambiente a qual estão inseridas;
Resposta a evidências: segundo Haykin (2001), uma rede neural pode ser projetada para fornecer informação não somente sobre qual padrão particular selecionar, mas também sobre a confiança na decisão tomada;
Informação contextual: representa o fato de que cada neurônio é afetado pela atividade de todos os outros neurônios da rede, desta forma, a informação contextual é tratada naturalmente pela rede neural;
Tolerância a falhas: uma rede neural implementada em hardware, tem potencial inerente tolerante a falhas, já que seu desempenho se degrada suavemente sob condições adversas, ou seja, a princípio não apresenta uma falha catastrófica;
Implementação em VLSI: uma característica benéfica da tecnologia VLSI ( very-large-scale-integration) é que ela fornece um meio de capturar comportamentos realmente complexos de forma altamente hierárquica (MEAD, 1989 apud HAYKIN, 2001);
Uniformidade de análise e projeto: as redes neurais apresentam universalidade como processadores de informação, no sentido de que a mesma notação é utilizada em todos os domínios envolvendo a aplicação de redes neurais;
Analogia neurobiológica: a motivação do projeto de uma rede neural é dada pela analogia ao cérebro, pois este é a prova viva de que o processamento paralelo tolerante a falhas é possível, rápido e poderoso.
2.4.1. O Neurônio Biológico
Figura 2.7 – Neurônio Biológico
Fonte: Adaptado de Haykin, 2001
O corpo celular ou soma é o responsável pelo processamento das informações que chegam ao neurônio na forma de pulsos elétricos e pela produção da resposta a estes estímulos externos, também como um pulso elétrico. Os dendritos são as estruturas do neurônio responsáveis pelo recebimento dos pulsos elétricos e o axônio é o responsável pela emissão do pulso elétrico produzido pelo neurônio às demais células nervosas com as quais este encontra-se conectado (HAYKIN, 2001).
A transmissão das informações entre os neurônios constituintes do cérebro humano se dá pelas sinapses, que são regiões eletroquimicamente ativas compreendidas entre duas membranas, as pré-sinápticas (axônio) e as pós-sinápticas (dendritos) de neurônios adjacentes. As sinapses são as principais estruturas do cérebro humano responsáveis pela armazenagem das informações, e são modificadas de acordo com o processo de aprendizagem ao qual o cérebro foi submetido. Qualquer alteração sobre o conhecimento de um determinado fenômeno já aprendido pelo cérebro só será possível pela alteração das sinapses estabelecidas entre os neurônios biológicos (HAYKIN, 2001).
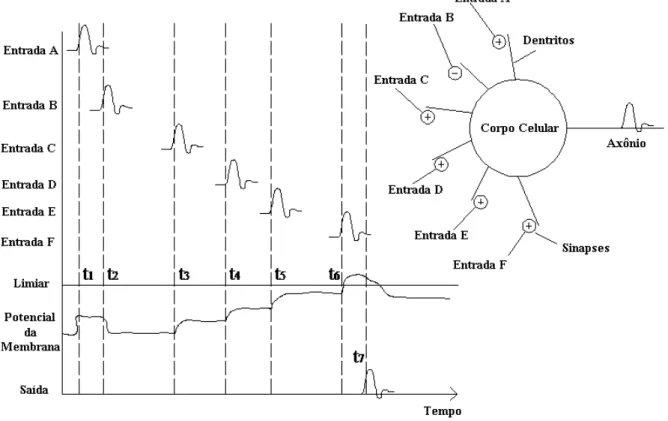
sobre a atividade do corpo celular. Quando a contribuição de todos os estímulos que chegam ao neurônio, em intervalos de tempo diferentes, atinge um determinado limiar, se dá então a produção do pulso elétrico, que se propaga pelo axônio até as células nervosas seguintes da rede neuronal (HAYKIN, 2001; KÓVACS, 2002).
Figura 2.8 – Funcionamento do neurônio biológico
Fonte: Adaptado de Kóvacs, 2002
2.4.2. O Neurônio Artificial
Figura 2.9 – Neurônio artificial
Fonte: Adaptado de Haykin, 2001
No modelo neuronal podem ser identificados os seguintes elementos básicos (HAYKIN, 2001):
Conjunto de sinapses ou elos de conexão (wkj) – funcionam analogamente as
sinapses do neurônio artificial, responsáveis pela armazenagem da informação e modificadas de acordo com o processo de aprendizagem da rede;
Bias ou limiar (bk) – o bias é análogo ao limiar no neurônio biológico e tem a
função de aumentar ou diminuir a entrada líquida da função de ativação, dependendo se ele é positivo ou negativo;
Combinador linear – representa a contribuição de todos os sinais de entrada ponderados pelos respectivos pesos sinápticos;
Função de ativação – representa o sinal de saída, ou a resposta do neurônio, sendo aplicada ao combinador linear com a função de restringir a amplitude de saída do neurônio.
As funções de ativação podem ser quaisquer funções matemáticas. De uma forma geral são normalmente utilizadas as seguintes funções de ativação: limiar, linear por partes, sigmoide, tangente hiperbólica
Em termos matemáticos, o neurônio k pode ser representado pelas seguintes equações:
(2.1)
(2.2)
(2.3)
w {w}T{ }
kix x
uk i
k k
i k
k
k u b x b x b
v
wki {w}T{ }) } { {w} ( ) w
( )
( T
ki i k k
k
k f v f x b f x b
Onde:
uk = saída do combinador linear;
vk = campo local induzido;
yk = sinal de saída ou resposta do neurônio;
bk = bias ou limiar;
f(.) = função de ativação do neurônio; {x} = [x1, x2, x3,..., xm ]= sinais de entrada;
{w} = [wk1 wk2 wk3... wkm]T = vetor dos pesos sinápticos que ligam o neurônio k ao
vetor de entrada {x}.
2.4.3. Breve Histórico
Com o conhecimento sobre o mecanismo básico de funcionamento do cérebro humano, como foi descrito anteriormente, foram possíveis os primeiros estudos sobre as redes neurais artificiais, que ocorreram nos anos de 1943 a 1958 com os trabalhos de McCulloch-Pitts, Hebb e Rosenblatt (HAYKIN, 2001).
De acordo com Kovács (2002), a referência número um para redes neurais começa com o trabalho de McCulloch e Pitts em 19431. Eles desenvolveram elementos computacionais
com base nas propriedades fisiológicas de neurônios biológicos. As limitações do modelo McCulloch-Pitts eram de que ele apenas podia ser utilizado para simular algumas funções booleanos simples (E/OU), cujas entradas são números binários definidos em um espaço separado de forma linear, e os seus pesos sinápticos e do limiar devem ser encontradas por processo de tentativa.
A publicação do livro intitulado "The Organization of Behavior", escrito por Hebb, em 1949, foi o próximo avanço importante nas redes neurais artificiais. Segundo Haykin (2001), neste trabalho, Hebb apresentou a primeira regra de aprendizagem fisiológica para modificação dos pesos sinápticos, que consideraram que as conexões cerebrais são continuamente modificadas enquanto o organismo aprende mais tarefas diferentes e que novos agrupamentos neurais são criados em função dessas modificações.
O desenvolvimento seguinte importante veio com o trabalho de Rosenblatt, em 1958, que propôs a rede neural conhecida como perceptron. Este modelo é o tipo mais simples de rede neural usada como um classificador linear. É constituída por apenas um neurônio
1 Warren McCulloch juntamente com Walter Pitts publicaram no Bulletin of Mathematical Biohysics um artigo
linear com pesos sinápticos ajustáveis e limiar. A vantagem do perceptron em relação ao neurônio artificial de McCulloch e Pitts foi o estabelecimento de uma regra de aprendizagem, cuja convergência foi provada por Rosenblatt, e é conhecida como "A Regra de Aprendizagem do Perceptron" (HAYKIN, 2001).
Além disso, devem-se mencionar os trabalhos de Widrow e Hoff em 1960. Esses autores desenvolveram um modelo linear chamado ADALINE (ADAptive LINnear Element), que foi então generalizado para múltiplas camadas e chamou MADALINE (Múltipla Adaline), em 1962. A principal contribuição deste modelo foi o estabelecimento de um princípio extremamente eficiente para treinamento das redes Adaline, o algoritmo LMS (Least Mean-Square), também conhecido como Regra Delta (KOVÁCKS, 2002), que foi posteriormente generalizada para o treinamento da rede neural multicamadas, quando foi nomeada como Regra do Delta Generalizada ou Algoritmo de Retropropagação.
2.4.4. Perceptron Multicamadas
Semelhante às redes neurais biológicas, as RNA são formadas por várias unidades fundamentais de processamento (neurônios) interligados entre si, formando uma estrutura paralela e não linear.
O perceptron multicamadas é uma rede neural multicamadas alimentada adiante, constituído por três camadas (Figura 2.10): a camada de entrada, cuja função é a de receber as informações externas; uma ou mais camadas intermediárias ou também denominadas ocultas, responsáveis pelo aumento da capacidade da rede neural artificial em extrair o comportamento mais complexo a partir dos dados disponíveis utilizados no processo de treinamento; e a camada de saída, cuja função é a de dar as respostas corretas para os estímulos do modelo.
Um perceptron multicamadas tem três características básicas (HAYKIN, 2001):
O modelo de cada neurônio da rede inclui uma função de ativação não linear;
A rede contém uma ou mais camadas ocultas, que não fazem parte, nem da entrada, nem da saída da rede;
Figura 2.10 – Rede alimentada adiante com camada de neurônios ocultos
Fonte: Adaptado de Haykin, 2001
A propriedade primordial de uma rede neural é a sua habilidade de aprender a partir do seu ambiente e melhorar seu desempenho através da aprendizagem. A aprendizagem da rede neural artificial consiste na alteração de todos os pesos sinápticos (wkj) e limiares existentes
(bk), a partir da experiência conhecida sobre o fenômeno estudado. Esta experiência é
representada por um conjunto de dados contendo as entradas e saídas conhecidas para o problema a ser modelado. Este conjunto de dados, geralmente designado como conjunto de treinamento, é definido como:
(2.4)
Onde:
= conjunto de dados de treinamento utilizados para modelagem de rede neural artificial;
L = número de entradas e saídas conhecidas no conjunto de dados de treinamento;
}
{xl = conjunto de entradas para os L-exemplos existentes no conjunto de dados de
treinamento;
= conjunto de saídas desejadas para as L-exemplos existentes no conjunto de dados de treinamento.
Ll l
l d
x },{ } 1
{
O perceptron de múltiplas camadas tem sido utilizado com frequência para solução de problemas complexos, através de seu treinamento supervisionado, utilizando um algoritmo conhecido como Algoritmo de Retropropagação do Erro (Error Back Propagation) que é baseado na regra de aprendizagem por correção do erro (HAYKIN, 2001).
A aprendizagem por retropropagação do erro consiste em dois passos através de todas as camadas da rede (HAYKIN, 2001):
Passo para frente: no qual um vetor de entrada é aplicado aos nós sensoriais da rede e seu efeito se propaga de camada a camada, por meio dos pesos sinápticos que são fixos, até a camada de saída produzindo uma resposta;
Passo para trás: após a obtenção do sinal nos neurônios da camada de saída, estes sinais são comparados à saída desejada para o estímulo dado à rede, gerando-se um sinal de erro que se propaga desde a camada de saída até a camada de entrada alterando os pesos sinápticos, conforme ilustrado na Figura 2.11, de forma que a resposta fornecida pela rede se aproxime da resposta desejada.
A Figura 2.11 representa um grafo de fluxo de sinal de um neurônio pertencente à camada de saída de um perceptron multicamadas.
Figura 2.11 – Neurônio j pertencente a camada de saída
O sinal de erro do neurônio k é determinado a partir do resultado do neurônio yk(i)
e comparado ao valor da saída desejada do i-ésimo exemplo do conjunto de treinamento, é dado por:
(2.5)
Onde:
ek(i) = sinal de erro do neurônio k, no exemplo i;
k
d (i) = saída desejada para o neurônio k, no exemplo i;
)
(i
yk = sinal gerado pelo neurônio k, no exemplo i.
Para o perceptron multicamadas, a função de custo utilizada para avaliar o desempenho da rede no conjunto de treinamento é o erro quadrático instantâneo dado por:
(2.6)
Onde:
c = conjunto de todos os neurônios da camada de saída no exemplo i do conjunto de treinamento.
Considerando o processo de treinamento em lote, no qual o conjunto de pesos sinápticos é fixo para todos os L-exemplos existentes no conjunto de treinamento, a função de custo é o erro quadrático médio Emed (n), definido como:
(2.7)
Onde:
c = conjunto de todos os neurônios da camada de saída no passo ݊;
n = passo de tempo discreto (época), correspondente a cada alteração do conjunto de pesos sinápticos no conjunto de treinamento.
Analisando-se as equações 2.7 e 2.3 pode-se observar que o erro quadrático médio é função apenas do vetor de pesos sinápticos {w(n)}.
O objetivo do processo de treinamento de uma rede neural é alterar o vetor de pesos sinápticos de forma que o erro médio quadrático médio, ou instantâneo, seja mínimo. Desta forma, os ajustes sucessivos no vetor de pesos sinápticos de um determinado neurônio de uma camada de saída, como por exemplo, o neurônio yk(n) representado na Figura 2.11, podem ser
feito da seguinte forma:
) ( ) ( )
(i d i y i
ek k k
L
i kec
k k
med d i y i
L n E
1
2 )] ( ) ( [ 2
1 ) (
kec
k i
e n
E ()
2 1 )
(2.8) Onde:
{wkj(n)} = ajuste do vetor de peso sináptico {wkj(n)} na época n;
Conforme ilustrado na Figura 2.12, esta alteração é feita de forma iterativa por meio de ajustes sucessivos no vetor de pesos sinápticos {wkj(n)}, percorrendo-se a superfície de Emed({wkj(n)}) na direção e sentido oposto ao do gradiente do erro quadrático médio (Emed),
dado por:
(2.9)
Desta forma, o ajuste do vetor de pesos sinápticos para o neurônio yj(n) pode ser
feito a partir da seguinte expressão:
(2.10) Onde:
= taxa de aprendizagem.
Figura 2.12 – Minimização da função de custo por ajustes sucessivos no vetor de pesos sinápticos.
Fonte: Araújo, 2013
) (
) ( )
(
n w
n E n E
kj med med
)} ( { )} ( { )} 1 (
{wkj n wkj n wkj n
) ( )}
( { )} 1 (
Desenvolvendo-se a Equação 2.9 e aplicando-se os resultados na Equação 2.10, obtém-se a seguinte expressão para o ajuste do vetor de pesos sinápticos para o neurônio yk(i)
da camada de saída, conhecida como Regra Delta:
(2.11)
Onde:
{wkj(n+1)} = vetor de pesos sinápticos entre os nós k (saída) e j (entrada) na iteração
n + 1;
{wkj (n)} = vetor de pesos sinápticos entre os nós k (saída) e j (entrada) na iteração
n;
= taxa de aprendizagem;
{yj(i)} = vetor de entrada do neurônio yk(n) no i-ésimo exemplo do conjunto de
treinamento;
k(i) = gradiente local do neurônio yj(n), definido como:
(2.12)
Onde:
ek(i) = sinal de erro do neurônio yk(i) no i-ésimo exemplo do conjunto de
treinamento;
vk(i) = campo local induzido do neurônio yk(i) no i-ésimo exemplo do conjunto de
treinamento;
No caso de um neurônio da camada oculta, como por exemplo do neurônio yj(i)
apresentado na Figura 2.13, o cálculo direto do gradiente local não é possível, uma vez, que o sinal produzido no mesmo propaga-se até a camada seguinte, e portanto, não produz nenhum sinal de erro. Neste caso, o gradiente local do neurônio da camada oculta é determinado por meio da retropropagação do sinal de erro produzido pelos neurônios da camada de saída yk(i).
Tal procedimento é conhecido como Algoritmo de Retropropagação do Erro (Error Back-propagation), e foi desenvolvido por Rumelhart, Hinton e Williams (1986) conforme citado por Haykin (2001).
1
)} ( ){ ( )}
( { )} 1 ( {
i keC
j j kj
kj i y i
L n w n
w
)) ( (' ) ( )
(i ek i f vk i
k
Figura 2.13 – Neurônio j pertencente a camada oculta
Fonte: Adaptado de Haykin, 2001
Aplicando-se o Algoritmo de Retropropagação do Erro, o gradiente local do neurônio yk(i) pertencente a uma camada oculta é determinado a partir da seguinte expressão:
(2.13)
Onde:
k(i) = gradiente local do neurônio yk(i) no i-ésimo exemplo do conjunto de
treinamento;
{wkj(n)} = vetor de peso sináptico entre o neurônio yj(i) da camada oculta e todos
os neurônios da camada subsequente, a qual pode ser inclusive a camada de saída, na iteração n.
A partir do conhecimento do gradiente local do neurônio yj(n), a alteração dos pesos sinápticos é feita empregando-se a Equação 2.11 apresentada anteriormente.
Segundo Haykin (2001), um método simples de aumentar a taxa de aprendizagem
de forma a evitar o perigo de instabilidade é incluir a constate momento A inclusão do momento no algoritmo de retropropagação tende a acelerar a descida em direções de declividade constante e tem efeito estabilizador nas direções que oscilam em sinal (WATROUS, 1987; JACOBS, 1988 apud HAYKIN, 2001). Desta forma, a alteração dos vetores de pesos sinápticos, conhecida como Regra Delta Generalizada, passou a ser feita de acordo com a Equação 2.14.
L
i keC
kj k j
j f v i i w n
L i
1
)} ( ){ ( )
( (' 1 )
(