iii
Em primeiro lugar, ao meu orientador Prof. Dr. Paulo Gil, pela amizade, credibilidade, apoio e completa disponibilidades, fundamentais para a realização deste trabalho, mostrando-me que não há limites para a criatividade humana e arte de fazer Ciência. Muito obrigado pela sua dedicação e amizade.
Ao Prof. Dr. Luís de Brito Palma na qualidade de co-orientador, pelos conselhos e sugestões, de fundamental importância para a consolidação de conceitos relacionados com a produção de algoritmos, que contribuíram de forma bastante relevante para o desenvolvimento deste trabalho.
À Prof. Dra. Valentina Vassilenko na qualidade de co-orientadora e ao Departamento de Física, pelos conselhos, sugestões e esclarecimentos na área da biomecânica do movimento humano, disponibilizando todo o material necessário para a validação experimental do modelo desenvolvido e respectivas simulações.
Ao Departamento de Engenharia Electrotécnica e em particular à secção de Decisão e Controlo, pelos meios disponibilizados e total apoio para a realização deste trabalho.
Aos meus amigos de infância Bruno Alves, Fábio Costa, Frederico Magina, Gonçalo Cabecinhas, Vasco Firmino e Rui Marques dedico este trabalho com grande amizade, nunca esquecendo os bons momentos passados, ainda hoje recordados com saudade.
Finalmente, mas sem dúvida o mais importante, dedico este trabalho aos meus pais que sempre me apoiaram em tudo na minha vida, acreditando sempre que seria capaz de alcançar os meus objectivos. Dedico também este trabalho para a pessoa de todos os momentos difíceis, fáceis, alegres e tristes, que sempre esteve ao meu lado, demonstrando que o amor e amizade não têm limites. Marlene Guerreiro Antunes, obrigado por existires na minha vida. A maior dedicatória que posso fazer vai para a minha querida avó, que sempre esteve ao meu lado para eu poder acabar esta etapa da minha vida…obrigado.
v
―If you can’t explain it simply you don’t understand it well enough.” Albert Einstein
Aos meus pais, à Marlene, ao nosso futuro… À minha querida avó…
vii
ÍNDICE
Lista de Figuras………....xi Lista de Quadros……….……...xvi Simbologia……….….xix Lista de Acrónimos………....xxi Resumo……….…xxiii Abstract……….……...xv CAPÍTULO 1 – INTRODUÇÃO……….……….….…...1 1.1. Motivação……….….….…1 1.2. Objectivos e Contribuições……….…...3 1.3. Estrutura da Dissertação……….……....4CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO………..…...7
2.1. Cinemática do Movimento Humano………...7
2.2. Síntese do Movimento Humano………...11
2.3. Síntese da Modelação Neuro-Músculo-Esquelética………...……16
2.3.1. O Modelo de Hill……….16
2.3.2. O Modelo de Zajac………..19
2.3.3. Modelo do Par Excitação – Contracção………..20
2.3.4. Associação entre a Activação Muscular e a Força Isométrica………...21
2.3.5. Modelos Musculares do Tipo SISO………22
2.3.6. Factores de Escala na Modelação Muscular………25
2.3.7. Modelação Mecânica dos Tendões………..……27
CAPÍTULO 3 – MODELO BIOMECÂNICO DO SISTEMA
NEURO-MÚSCULO-ESQUELÉTICO………..32
3.1. Contextualização………..33
3.2. Anatomia do Braço Humano………....34
3.2.1. Articulação do Ombro………..35
3.2.2. Articulação do Cotovelo………...37
3.2.3. Estrutura Muscular………...….39
3.3. Arquitectura do Modelo………...40
3.3.1. Dinâmica de Recrutamento das Unidades Motoras………....45
3.3.2. Dinâmica de Activação Muscular………47
3.3.3. Propriedades Mecânicas Musculares………...51
3.3.4. Dinâmica dos Fusos Musculares e Comando Gama………...53
3.3.5. Retroacção dos Órgãos Tendinosos de Golgi……….56
3.3.6. Dinâmica do Actuador Músculo-Tendíneo……….54
3.3.7. Dinâmica Articular………...60
3.4. Simulação Numérica e Resultados………...61
3.5. Validação e Análise Comparativa………81
3.5.1. Métodos de Electromiografia……….…...82
3.5.2. Ensaios Experimentais e Resultados………...84
3.5.3. Análise Comparativa………..109
CAPÍTULO 4 – CONTROLO MOTOR COM REDES NEURONAIS ARTIFICIAIS…….110
4.1. O Neurónio Artificial……….111
4.2. Topologias Neuronais……….114
4.3. Controlo Neuronal………..116
ix
4.3.2.2. Controlo Neuronal Adaptativo Indirecto………...119
4.3.2.3. Controlo Neuronal por Modelo Interno……….120
4.3.2.4. Controlo Neuronal por Modelo Preditivo………..121
4.4. Simulação Numérica em Anel Fechado………..…..122
CAPÍTULO 5 – CONCLUSÕES E TRABALHO FUTURO……….134
5.1. Conclusões………134
5.2. Perspectivas de Trabalho Futuro………...135
Referências Bibliográficas………...138
xi
LISTA DE FIGURAS
Figura 2.1 – Posição anatómica de referência (M. Silva, 2004)……….8 Figura 2.2 – Planos anatómicos de referências (M. Silva, 2004)………..………..…9 Figura 2.3 – Eixos anatómicos de referência (M. Silva, 2004)……….………10 Figura 2.4 – Os três principais movimentos que ocorrem no plano sagital (M. Silva, 2004)...10 Figura 2.5 – Modelo 3D de nove segmentos representando a marcha humana (Gilchrist and Winter, 1996)………....13 Figura 2.6 – Modelo 3D do membro superior humano, desenvolvido em OpenSim………...14 Figura 2.7 – Modelo 3D constituído por dez segmentos, vinte e três graus de liberdade e quatro actuadores músculo-tendíneos, desenvolvido em OpenSim (Allison, et al., 2005)…..15 Figura 2.8 – Modelo 3D do ciclo da marcha humana, desenvolvido em SIMM………..15 Figura 2.9 – Relação Força-Comprimento muscular para um componente elástico em série (Ritchie, et al., 1958)………....17 Figura 2.10 – Modelo muscular do tipo Hill descrevendo a dinâmica de contracção do tecido muscular (Zajac, 1989)……….…....17 Figura 2.11 – Diagrama de blocos do modelo de Zajac (adaptado de Zajac, 1989)…………20 Figura 2.12 – Associação entre a activação muscular e a actividade electromiográfica (EMG) num modelo muscular do tipo SISO (Zajac, 1989)……….….24 Figura 2.13 – Relação entre as fibras musculares com um ângulo de inclinação α e o tendão (Zajac, 1989)……….…27 Figura 2.14 – Propriedades materiais dos tendões. (A) Relação nominal tensão-elasticidade; (B) Relação dimensional tensão-elasticidade (Zajac, 1989)………...…..29 Figura 2.15 – Diagrama de blocos ilustrando a interacção entre o tendão e o músculo, na geração de força. (A) Funcionamento conjunto entre os actuadores músculo-tendíneos e os segmentos corporais; (B) Dinâmica do actuador e (C) Dinâmica de contracção do actuador músculo-tendíneo (adaptado de Zajac, 1989)……….…….31
Figura 3.1 – Estrutura hierárquica do sistema neuro-músculo-esquelético ao nível da espinal
medula (adaptado de Jinping, et al., 2001)………...34
Figura 3.2 – Articulação do ombro………...37
Figura 3.3 – Articulação do cotovelo: vista posterior e lateral……….38
Figura 3.4 – Deltóide Anterior……….39
Figura 3.5 – Bicípete Braquial………..40
Figura 3.6 – Tricípete Braquial……….40
Figura 3.7 – Diagrama de blocos do sistema neuro-músculo-esquelético baseado na co-activação alfa-gama……….….42
Figura 3.8 – Representação geométrica bidimensional (XOY) do sistema formado pelas duas articulações (ombro e cotovelo) e pelos dois pares de músculos esqueléticos antagonistas (bicípete braquial, tricípete braquial, deltóide anterior e deltóide posterior), (adaptado de Lan, 2002)……….43
Figura 3.9 – Representação geométrica (XOY) simplificada do sistema em causa, considerando apenas uma articulação e um par de músculos antagonistas, (adaptado de Lan, 2005)……….44
Figura 3.10 – Comandos descendentes gerados em computador……….46
Figura 3.11 – Dinâmica de recrutamento das unidades motoras sob a forma de modelo de estado………47
Figura 3.12 – Diagrama de blocos da excitação neuromotora………..49
Figura 3.13 – Diagrama de activação muscular sob a forma de modelo de estado…………..51
Figura 3.14 – Dinâmica dos fusos musculares………..54
Figura 3.15 – Dinâmica do actuador músculo-tendíneo (adaptado de Zajac, 1989)…………59
Figura 3.16 – Algoritmo correspondente ao modelo neuro-músculo-esquelético desenvolvido……….64
Figura 3.17 – Dinâmicas de recrutamento e excitação neuronal, face aos comandos descendentes do SNC………...68
xiii
intrafusais………..69
Figura 3.19 – Comprimento, velocidade e rigidez das fibras musculares………70
Figura 3.20 – Resposta sensorial dos proprioreceptores musculares………....71
Figura 3.21 – Trajectória e velocidade angular de cada uma das articulações, assim como os seus momentos de torção e rigidez. Relações força-comprimento e força-velocidade muscular………72
Figura 3.22 – Aproximação mecânica do braço humano, a um pêndulo simples……….79
Figura 3.23 – Trajectória cartesiana da articulação do cotovelo………..…80
Figura 3.24 – Trajectória cartesiana da articulação do ombro………..80
Figura 3.25 – Trajectória cartesiana do membro superior modelado………..….81
Figura 3.26 – Electromiografia de profundidade e de superfície……….…82
Figura 3.27 – Ilustração gráfica da relação força-velocidade (EMD – Electromechanical Delay), (Benno e Walter, 2003)………....83
Figura 3.28 – Vista geral da unidade de aquisição MP35………85
Figura 3.29 – Pack de eléctrodos EL503 utilizados para aquisição electromiográfica……….85
Figura 3.30 – Conjunto de cabos SS2L………86
Figura 3.31 – Elementos constituintes da carga utilizada nos dados experimentais………....87
Figura 3.32 – Estrutura de suporte aos ensaios experimentais……….87
Figura 3.33 – Aquisição em tempo real dos EMG’s do indivíduo realizando o movimento padrão………...88
Figura 3.34 – Resultados experimentais do primeiro ensaio………89
Figura 3.35 – Resultados experimentais do segundo ensaio………90
Figura 3.36 – Resultados experimentais do terceiro ensaio………..91
Figura 3.37 – Algoritmo de validação do modelo desenvolvido………..92
Figura 3.38 – EMG’s adquiridos durante o ensaio experimental n.º 1 e dinâmicas de activação e força muscular, resultantes……….…………94
Figura 3.39 – Comprimento, velocidade e rigidez muscular, ensaio experimental n.º 1…….95 Figura 3.40 – Resposta sensorial dos proprioreceptores musculares, face ao comando gama, ensaio experimental n.º 1………..96 Figura 3.41 – Trajectória e velocidade angular de cada uma das articulações; momentos de torção e respectiva rigidez; relação força-comprimento e força-velocidade muscular, ensaio experimental n.º 1……….97 Figura 3.42 – Trajectória cartesiana da articulação do cotovelo, ao longo do tempo, ensaio experimental n.º 1……….98 Figura 3.43 – Trajectória cartesiana da articulação do ombro, ao longo do tempo, ensaio experimental n.º 1……….98 Figura 3.44 – Trajectória cartesiana do membro superior modelado, ao longo do tempo, ensaio experimental n.º 1……….99 Figura 3.45 – EMG’s adquiridos durante o ensaio experimental n.º 3 e dinâmicas de activação e força muscular, resultantes………...100 Figura 3.46 – Comprimento, velocidade e rigidez muscular, ensaio experimental n.º 3…....101 Figura 3.47 – Resposta sensorial dos proprioreceptores musculares, face ao comando gama, ensaio experimental n.º 3………102 Figura 3.48 – Trajectória e velocidade angular de cada uma das articulações; momentos de torção e respectiva rigidez; relação força-comprimento e força-velocidade muscular, ensaio experimental n.º 3………103 Figura 3.49 – Trajectória cartesiana da articulação do cotovelo, ao longo do tempo, ensaio experimental n.º 3………104 Figura 3.50 – Trajectória cartesiana da articulação do ombro, ao longo do tempo, ensaio experimental n.º 3………104 Figura 3.51 – Trajectória cartesiana do membro superior modelado, ao longo do tempo, ensaio experimental n.º 3………105 Figura 3.52 – Evolução temporal dos erros associados a cada uma das forças musculares, do subsistema articular do cotovelo…….………106
xv
subsistema articular do ombro…….………...108
Figura 4.1 – Hall Project……….…111
Figura 4.2 – Modelo do neurónio artificial com apenas uma entrada e uma saída………….112
Figura 4.3 – Modelo do neurónio artificial com m entradas e uma saída………...113
Figura 4.4 – Topologia neuronal: a) Monocamada completamente intraconectada; b) Monocamada parcialmente intraconectada; c) Proactiva de três camadas e d) Dupla camada retroactiva (adaptado de H. D. Ramos, 2002)……….………115
Figura 4.5 – Arquitectura de rede neuronal com treino e recuperação (adaptado de H. D. Ramos, 2002)………..117
Figura 4.6 – Arquitectura de controlo adaptativo directo………..118
Figura 4.7 – Arquitectura de controlo adaptativo indirecto………...119
Figura 4.8 – Arquitectura de controlo neuronal por modelo interno………..121
Figura 4.9 – Arquitectura de controlo neuronal por modelo preditivo………...121
Figura 4.10 – Arquitectura de controlo neuronal IMC implementada no modelo desenvolvido………...122
Figura 4.11 – Conjunto de dados de estimação………..125
Figura 4.12 – Conjunto de dados de validação………..126
Figura 4.13 – Resultados do treino neuronal do modelo interno………....127
Figura 4.14 – Variação temporal dos erros quadráticos associados ao treino neuronal do modelo interno da instalação………...127
Figura 4.15 – Resultados do treino neuronal do controlador……….….128
Figura 4.16 – Variação temporal dos erros quadráticos associados ao treino neuronal do controlador………..129
Figura 4.17 – Gráficos de Barras ilustrando o número óptimo de neurónios artificiais a utilizar na camada interna………130
Figura 4.18 – Trajectórias de referência e trajectórias obtidas à saída da instalação, com a arquitectura IMC implementada……….131 Figura 4.19 – Sinais de acção de controlo, geradas pelo controlador neuronal IMC implementado………..132
xvii
Quadro 3.1 – Parâmetros numéricos utilizados no modelo neuro-músculo-esquelético……..65 Quadro 3.2 – Características físicas da carga utilizada nos ensaios experimentais………….86 Quadro 3.3 – Valor médio do erro e a sua variância, em relação às quatro forças musculares, ensaio experimental n.º1……….108 Quadro 3.4 – Valor médio do erro e a sua variância, em relação às quatro forças musculares, ensaio experimental n.º3……….108 Quadro 4.1 – Exemplos de funções de activação neuronal………113 Quadro 4.2 – Parâmetros numéricos utilizados no treino neuronal………....124
xix
a (t) Activação Muscular
u(t) Excitação Neuronal
ui(t) Excitação Neuronal de i Unidades Motoras (i = 1 … n)
τact Tempo de activação muscular
τdesact Tempo de desactivação muscular
τc Parâmetro de escala temporal
t Tempo
F0 m
Força muscular isométrica
F m Força muscular
F PE Força muscular passiva
F CE Força muscular activa
F T Força produzida pelo tendão
F MT Força produzida pelo actuador músculo – tendíneo
fl Relação força – comprimento muscular
flv Relação força – comprimento - velocidade muscular
fv Relação força – velocidade muscular
L0 m
Comprimento muscular isométrico
L m Comprimento muscular
L T Comprimento do tendão
L MT Comprimento do actuador músculo – tendíneo
LTS Quantidade de redução de comprimento do tendão, em relação à sua posição de repouso
ΔLT
Variação de comprimento do tendão
γLS
Comprimento dos γsarcómeros
v T Velocidade do tendão
vmax Velocidade máxima de encurtamento muscular
v MT Velocidade do actuador músculo – tendíneo
T Tensão muscular
T0 Tensão muscular isométrica
TCE Tensão muscular do elemento contráctil
α Nervos motores alfa
α (t) Ângulo das fibras musculares
α0 Ângulo óptimo das fibras musculares
αaff Nervos motores aferentes alfa
αeff Nervos motores eferentes alfa
α – γ Co-activação alfa – gama
β Rácio entre τact e τdesact
γ Nervos motores gama
γ eff Nervos motores eferentes gama
σ Tensão muscular ε T Elasticidade do tendão σ T Tensão do tendão εT
0 Elasticidade do tendão quando F
T
= F0 m
σT
0 Tensão do tendão quando F
T = F0 m
xxi
LISTA DE ACRÓNIMOS
CE Elemento Contráctil (Contractil Element) DE Elemento Amortecedor (Damping Element)
EC Par Excitação – Contracção (Excitation-Contraction Couple) EMG Electromiografia (Electromiography)
IMC Controlo por Modelo Interno (Internal Model Control)
FE Electroestimulação Funcional (Functional Electro Estimulation) MRAC Controlo por Modelo de Referência (Model Reference Control) MPC Controlo por Modelo Predictivo (Model Predictive Control)
MIMO Múltiplas Entradas – Múltiplas Saídas (Multiple Inputs – Multiple Outputs) SISO Uma Entrada – Uma Saída (Single Input – Single Output)
SEE Elemento Muscular Elástico em Série (Series Elastic Element)
SNC Sistema Nervoso Central
SNP Sistema Nervoso Periférico
PE Elemento Muscular Passivo (Passive Element) GTO Órgãos Tendinos de Golgi (Golgi Tendon Organs)
xxiii
RESUMO
Em diversas situações clínicas, como sejam por exemplo, traumas ao nível da espinal-medula, mielopatias degenerativas, entre outras, os doentes podem vir a manifestar a perda sensorial e do controlo da função motora.
Este trabalho propõe o desenvolvimento de um modelo matemático quantitativo, para o sistema neuro-músculo-esquelético humano, em particular, para o membro superior humano incorporando algumas das suas dinâmicas, incluindo a retroacção dos proprioreceptores musculares de Golgi. Foram estudadas as suas características estáticas e dinâmicas, assim como toda a fisiologia neuromotora relacionada, tendo em vista a compreensão dos fenómenos biológicos associados à mobilidade do braço humano. O objectivo primordial deste modelo prende-se com a necessidade de desenvolver métodos práticos não invasivos que permitam o estudo deste mesmo sistema, podendo ter aplicabilidade na área da reabilitação motora. Foram estudadas técnicas de modelação biomecânica como base para a construção do modelo biomecânico. A sua robustez e fiabilidade são testadas e avaliadas tendo em vista a síntese de um modelo adequado aos objectivos propostos.
Com vista a poder controlar voluntariamente o movimento de um dos membros superiores com base em trajectórias especificadas pelo ―doente‖, estuda-se a aplicação de metodologias de controlo inteligente no contexto da interface homem-máquina, que permitam o desenvolvimento de hardware protésico.
Palavras-chave: Sistema Neuro-Músculo-Esquelético, Modelação Biomecânica,
xxv
ABSTRACT
In many clinical situations, such as degenerative myelopathy or spinal cord trauma, where the descending commands are blocked at the spinal cord level, patients face the lost or the impaired of their motor function.
This work proposes developing an analytical model of the human spinal neuro-musculo-skeletal system applied to the human upper limb, by studying some of its static and dynamic characteristics, including the Golgi proprioreceptors, as well as related neurophysiology necessarily to the understanding of the biological phenomena associated to the upper limb. The main goal of this model is the developing of non-invasive and practical tools to study this system whose outcomes may have applicability in human motor rehabilitation. Additionally biomechanical model techniques have been studied and incorporated in model. The model performance and robustness were tested and evaluated.
This work also suggests the study and synthesis of intelligent control methodologies in the human-machine interface context that will allow the implementation of prosthesis hardware, in order to induce voluntary motor control of one of the patient’s upper limbs, based on is trajectory references.
Keywords: Neuro-Musculo-Skeletal System, Biomechanics, Electromyogram, Artificial
CAPÍTULO 1 – INTRODUÇÃO
1.1 Motivação
O sistema neuro-músculo-esquelético humano é um sistema biológico bastante complexo, com comportamento adaptativo e de forte não linearidade. Esta extrema complexidade, tem desafiado a comunidade científica para uma mais profunda compreensão da arquitectura estrutural e funcionamento deste sistema, abrindo novas perspectivas sobre este tema (H. Jiping, et al., 2001), tendo aplicabilidade em várias áreas.
Recentemente, a síntese de modelos computacionais e controlo do movimento humano tem sido, de forma generalizada, aplicado à robótica humanóide, com o desenvolvimento de robôs bípedes como é o caso do ASIMO da Honda Corporation1. Contudo, a mesma abordagem poderá ser aplicada ao estudo biológico do sistema neuro-músculo-esquelético humano, tendo demonstrado um grande potencial na avaliação clínica ao nível da locomoção e movimento humano. Este mesmo estudo apresenta obstáculos de uma complexidade colossal, pois o corpo humano de um adulto de média idade, apresenta um total de 206 ossos e 650 músculos esqueléticos. A velocidade de propagação do impulso nervoso na membrana de um neurónio varia entre 10cm/s e 1m/s, sendo o sistema nervoso central humano uma máquina de comunicação muitíssimo rápida e de uma precisão extrema. Todos estes factores tornam a tarefa de modelar e recriar, as dinâmicas e comportamentos de partes do corpo humano, um desafio científico de grande escala.
Vários trabalhos de investigação foram desenvolvidos em torno deste tema, tais como, o estudo do papel dos reflexos ao nível da espinal medula para a postura e controlo de movimento (Lan, et al., 2005), análise da estabilidade e controlo de postura em doentes paralisados ao nível motor (Lan, 2002), desenvolvimento de algoritmos preditivos para controlo neuromuscular (Keplan L., et al., 2001), entre outros. Estas investigações demonstraram uma grande importância no desenvolvimento de modelos computacionais que
permitissem estudar o sistema neuro-músculo-esquelético ao nível do seu funcionamento generalizado.
Os estudos levados a cabo utilizando tecnologia da electro-estimulação funcional (FES) resultaram num grande avanço do ponto de vista da engenharia de reabilitação, uma vez que permitiu a identificação de estratégias e técnicas de controlo para reabilitação da função motora em paraplégicos e quadraplégicos (Lan, 2002).
Desta forma, surgiram vários laboratórios de análise do movimento humano, análise essa através de cinemetria. A cinemetria consiste num conjunto de métodos que permitem a determinação da posição e orientação dos segmentos corporais, de forma a medir os parâmetros cinemáticos do movimento, isto é, posição, orientação, velocidade e aceleração. O instrumento básico para medidas cinemáticas é baseado em cameras de vídeo que registam a imagem do movimento ou as coordenadas de pontos de interesse e então através de software específico calculam as variáveis cinemáticas de interesse.
Para além dos sistemas de vídeo, a análise cinemática pode ser também efectuada através de sensores piezoeléctricos que medem a intensidade e direcção das forças resultantes de contacto com uma determinada superfície, bem como análise electromiográfica (EMG) através da colocação de eléctrodos na superfície do músculo (EMG de superfície) ou no seu interior (EMG de profundidade – in vivo), que monitorizam a actividade neuromuscular com base na actividade eléctrica do músculo (M. Pandy, 2001), permitindo desta forma o estudo do tempo de activação muscular durante a actividade motora.
Os dados recolhidos em laboratório revelam uma descrição quantitativa da cinemática e dinâmica subjacente ao movimento dos vários segmentos corporais, não explicando contudo de que forma é que o sistema muscular interage entre si de modo a produzir um padrão coordenado de movimento. De forma mais específica, a cinemática, as forças de reacção e os dados electromiográficos em assíncronia não explicam concisamente de que forma é que cada músculo interage entre si para acelerar cada um dos segmentos corporais, num determinado ciclo de movimento.
Com os recursos computacionais disponíveis actualmente, modelos biomecânicos do sistema neuro-músculo-esquelético continuarão a ser desenvolvidos e aperfeiçoados, de modo
padrões de movimento humano, com um grau de complexidade bastante superior aos produzidos há cerca de uma década atrás (M. Pandy, 2001).
1.2 Objectivos e Contribuições
O objectivo principal deste trabalho consiste na elaboração de um modelo biomecânico inovador, que permita o estudo das características estáticas e dinâmicas do sistema neuro-músculo-esquelético humano, aplicado a um caso particular – o membro superior humano. O desenvolvimento de um modelo deste tipo propõe um método prático não invasivo que permita a análise das dinâmicas inerentes a este sistema, e que poderá ser associado ao estudo de casos clínicos, onde os doentes manifestem a perda sensorial e controlo da função motora.
Do ponto de vista sistémico, são tidas em conta todas as dinâmicas constituintes do sistema neuro-músculo-esquelético humano, obedecendo à sua estrutura biológica e hierárquica. O desenvolvimento de um modelo analítico representativo deste sistema, tem como contribuições principais o estudo dos tempos de activação muscular e recrutamento das unidades motoras, durante um movimento de referência a que o membro superior humano é sujeito. Desta forma, é possível analisar durante um movimento especifico quais são as unidades motoras recrutadas e em que intervalo de tempo isso acontece e, posteriormente a excitação provocada nas fibras músculo-esqueléticas. Estas, por sua vez irão exercer as forças musculares que irão actuar directamente nas articulações do membro superior. A dinâmica dos proprioreceptores musculares é também incluída no modelo, com principal destaque para os órgãos tendinosos de Golgi. Estes são necessários para uma representação correcta do sistema sensorial muscular, permitindo uma resposta adequada dos mesmos quando sujeitos a uma determinada excitação neuromotora.
O desenvolvimento deste modelo assenta em duas fases: 1) Desenvolvimento do modelo analítico;
2) Validação do Modelo e análise estatística do mesmo, através de dados electromiográficos
Como objectivo adicional é proposto o estudo e síntese de metodologias de controlo inteligente no contexto da interface homem-máquina, utilizando redes neuronais artificiais de
forma a emular a dinâmica de controlo motor humano, permitindo assim controlar a trajectória do membro modelado.
Na base do trabalho efectuado foi desenvolvido um artigo científico, cuja submissão foi aceite e apresentado oralmente no Oitavo Simpósio Internacional de Métodos Computacionais em Biomecânica e Engenharia Biomédica, (8th International Symposium on Computer Methods in Biomechanics and Biomedical Engineering - http://www.cmbbe2008.cf.ac.uk/).
1.3 Estrutura da Dissertação
A presente dissertação está estruturada em 5 capítulos, sendo o presente capítulo o de apresentação de motivações e objectivos do presente trabalho.
No capítulo 2 é discutida a biomecânica humana, apresentando o conceito de cinemática do movimento humano, que estuda o movimento mecânico do corpo humano como um conjunto de segmentos corporais independentes. Vários estudos de simulação e modelação biomecânica com o recurso a sistemas computacionais são descritos, assim como a sua evolução tecnológica. São igualmente analisadas várias técnicas de modelação físico-matemática dos elementos neuro-músculo-esqueléticos, tendo em vista a construção de um modelo analítico para o sistema neuro-músculo-esquelético, que contenha todas a dinâmicas retratadas em cada um dos seus elementos constituintes.
No capítulo 3 descreve-se o modelo biomecânico do membro superior humano proposto nesta dissertação. Faz-se uma caracterização matemática das estruturas implementadas, neste caso, modelos individuais, que através de uma estrutura multi-modelo hierárquica compõem o modelo global. São apresentados os resultados numéricos da simulação computacional, que são sujeitos a validação posterior. Procede-se ainda à análise estatística do modelo, com o objectivo de testar a sua fiabilidade.
O capítulo 4 é dedicado à implementação de uma estratégia de controlo inteligente, que permita o seguimento de trajectórias de referência, ou seja, o controlo artificial do modelo neuro-músculo-esquelético do membro superior humano, desenvolvido no capítulo 3. São apresentadas as vantagens da utilização de um controlador artificial em cascata com este tipo
neuronal. Por fim, são apresentados os resultados obtidos com o sistema de controlo implementado, discutindo o seu comportamento de acordo com o problema em causa.
Finalmente no capítulo 5 são apresentadas as conclusões e linhas de investigação futuras, complementares ao trabalho apresentado.
CAPÍTULO 2 – BIOMECÂNICA DO MOVIMENTO HUMANO
A biomecânica do movimento humano pode ser definida como uma ciência interdisciplinar que descreve, analisa e avalia o movimento humano. Uma grande gama de movimentos físicos é considerada desde o movimento físico de uma pessoa deficiente motora, ao levantar de uma carga de peso variável por parte de um funcionário fabril, ao desempenho de um atleta de alta competição. Os princípios físicos e biológicos aplicados serão iguais em todos os casos. O que difere de um caso para o outro é exactamente a tarefa que leva a um movimento específico e o nível de pormenor e performance de cada movimento (Winter, 2005).
A lista de profissionais e semiprofissionais interessados em aplicar aspectos do movimento humano é bastante vasta: cirurgiões ortopédicos, treinadores de atletas, engenheiros de reabilitação, terapeutas, cinésiologistas, projectistas de próteses, psiquiatras, ortodontistas, designers de vestuário desportivo, entre outros. A um nível mais baixo, o nome dado à ciência que estuda a área principal do movimento humano é a cinésiologia. Trata-se de uma área de estudo em ascensão que compreende aspectos desde a psicologia, adaptação motora, fisiologia assim como a biomecânica. A biomecânica, enquanto resultado das ciências físicas e biológicas, assenta na compreensão da física, química, matemática, fisiologia e anatomia do corpo humano. É de notar que os primeiros ―biomecânicos‖ no verdadeiro sentido da palavra datam desde o período da Grécia antiga, DaVinci, Galileu, Lagrange, Bernoulli, Euler e Young. Todos estes cientistas tiveram interesses primários na aplicação de fundamentos de modelação mecânica para a resolução de problemas biológicos (Winter, 2005).
2.1 Cinemática do Movimento Humano
O movimento humano é geralmente descrito como uma combinação complexa de movimentos de translação e de movimentos de rotação (M. Silva, 2004).
No caso do movimento de translação, este considera que todo o corpo se move de forma única e que não existe movimento relativo de rotação entre segmentos anatómicos, pelo que
pode ser rectilíneo, caso ocorra ao longo de um segmento recto ou caso contrário, curvilíneo. No caso do movimento de rotação, este considera que existe uma rotação do corpo ou de um ou mais segmentos anatómicos, em torno de um eixo instantâneo de rotação normalmente situado num centro articular (M. Silva, 2004).
O corpo humano pode ser dividido geometricamente por planos anatómicos de referência (vd Figura 2.1), também denominados de planos cardinais, são 3, perpendiculares entre si (M. Silva, 2004):
1. Plano Sagital: Divide o corpo verticalmente, nas suas duas metades: direita e esquerda. (Movimentos neste plano: corrida, marcha, bicicleta);
2. Plano Frontal: Divide o corpo verticalmente, nas suas duas metades: anterior e posterior. (Movimentos neste plano: saltos laterais, roda, pontapés laterais em artes marciais);
3. Plano Transverso: Divide o corpo horizontalmente, nas suas duas metades: inferior e superior. (Movimentos neste plano: dança, ginástica, saltos artísticos).
Figura 2.1 – Planos anatómicos de referência (M. Silva, 2004).
na descrição de movimentos de grande amplitude e para a definição da terminologia específica dos tipos de movimento do corpo humano. No entanto existem muitos movimentos do corpo humano que não são orientados segundo estes planos, utilizando-se nestes casos planos oblíquos (M. Silva, 2004).
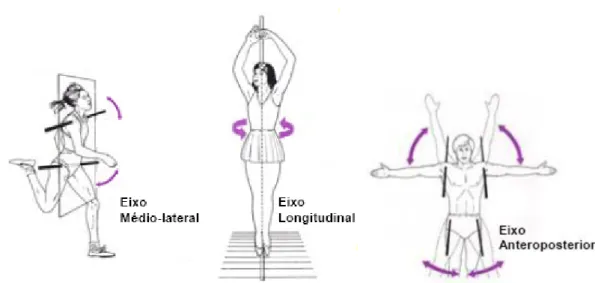
O movimento dos segmentos anatómicos do corpo humano ocorre em torno de um eixo de rotação imaginário que passa pela junta à qual o segmento está ligado (M. Silva, 2004). Existem três eixos de referência, utilizados na descrição do movimento humano, estando cada um deles orientado perpendicularmente a um dos planos de referência:
1. Eixo médio-lateral: Perpendicular ao plano sagital, define os movimentos que ocorrem nesse mesmo plano;
2. Eixo anteroposterior: Perpendicular ao plano frontal, define os movimentos que ocorrem nesse mesmo plano;
3. Eixo longitudinal: Perpendicular ao plano transversal, define os movimentos que ocorrem nesse mesmo plano.
Figura 2.2 – Os três eixos anatómicos de referência: eixo médio-lateral, longitudinal e anteroposterior (M. Silva, 2004).
A posição anatómica de referência é considerada como sendo a postura de referência utilizada na descrição da posição e movimento relativo entre os segmentos anatómicos do
corpo humano (vd. Figura 2.3). Esta corresponde a uma postura na qual o corpo se encontra na posição erecta, com os pés ligeiramente separados e com os braços suspensos lateralmente, com as palmas das mãos viradas para a frente (M. Silva, 2004).
Figura 2.3 – Posição anatómica de referência (M. Silva, 2004).
Os três principais movimentos que ocorrem no plano sagital são designados de flexão, extensão e hiperextensão. O movimento de flexão implica uma rotação no plano sagital na direcção anterior aos segmentos anatómicos da cabeça, tronco, braço, antebraço, mão e anca numa direcção posterior para o segmento da perna (M. Silva, 2004). O movimento de extensão consiste no movimento que retorna um segmento anatómico flectido à sua posição de referência e o movimento de hiperextensão é definido como uma extensão para além da posição anatómica de referência, na direcção oposta à direcção de flexão (M. Silva, 2004).
Uma vez que o modelo a desenvolver neste trabalho é bidimensional, apenas se irá trabalhar no plano sagital do corpo humano, pelo que os movimentos correspondentes aos restantes planos não serão tidos em conta.
2.2 Síntese do Movimento Humano
O movimento humano é um tema que tem atraído bastante a comunidade científica. Como será descrito em pormenor no capítulo 3, a vasta análise cinética do movimento humano baseia-se, essencialmente, na dinâmica inversa. Este tipo de análise leva a que medidas cinemáticas sejam combinadas com forças externas (e.g., no caso do movimento do ombro e cotovelo durante exercícios de flexão e extensão, exigindo contacto com o solo) adquiridas experimentalmente, para estimar as forças de reacção internas e momentos de torção (ao nível das articulações). Posteriormente, utilizam-se estas medidas cinemáticas em modelos simples, formados apenas por um número reduzido de segmentos corporais, de modo a estimar as forças que originam determinado movimento. Contudo, a resposta obtida é o inverso do que realmente acontece. Se incluirmos o facto de o movimento humano ser uma sequência articulada de eventos rápidos e complexos, que resulta da variação da excitação neuronal ao nível muscular, a rede de efeitos provocados por todas as forças musculares que actuam em cada articulação, gera um momento de força variante no tempo, que provoca a aceleração (ou desaceleração) dos segmentos corporais adjacentes. Se esta aproximação for modelada em computador, o seu resultado será uma ―solução inovadora‖ (Winter, 2005).
As potencialidades práticas e teóricas deste tipo de soluções é enorme. Contudo, devido a uma série de constrangimentos, ainda nem todos os objectivos foram alcançados. Poder-se-á colocar as seguintes questões, de modo a compreender este problema: ―O que aconteceria se…?‖. Por exemplo, um treinador de atletas de alta competição poderia formular a seguinte questão: ―O padrão de movimento do meu atleta é o ―óptimo‖, e caso não o seja, quais as alterações a efectuar para o optimizar?‖ Um investigador poderia querer dar resposta a esta pergunta com base em teorias de modelação matemática, física e controlo motor aplicado ao ser humano, pretendendo testar a sua teoria através da simulação do respectivo modelo.
Todavia, antes de qualquer resposta válida, o modelo desenvolvido entretanto deverá ser devidamente validado. Uma condição necessária (mas não suficiente) que tenha sido testada poderá ser correspondente à validação final (Winter, 2005). No caso de uma representação
anatómica do corpo humano, através de um modelo constituído por um número reduzido de segmentos corporais e respectivas articulações, uma solução inversa deverá ser encontrada de modo a calcular os momentos de torção de cada articulação e em cada plano requerido (sagital, coronal, etc.). Posteriormente, utilizar-se-iam estes padrões motores, conjuntamente com as condições iniciais, como entradas do modelo, obtendo-se desta forma uma reprodução original da cinemática inerente a este caso. Caso o modelo anatómico seja insuficiente, mesmo com padrões cinemáticos válidos, ter-se-á como resultado um rápido acumular de erros de trajectória (Winter, 2005).
Neste enquadramento, devido à complexidade inerente ao movimento humano, vários modelos foram desenvolvidos, simplificando essa mesma complexidade e tentando simultaneamente reproduzir o movimento humano. Townsend e Seireg (Townsend et al., 1972) desenvolveram um modelo com dois elementos de massa, representando os membros inferiores humanos e considerando apenas um grau de liberdade em cada articulação na anca (flexão/extensão). Hemami (Hemami, 1980) propôs um modelo tridimensional dos membros inferiores, formado por três segmentos e não considerando os pés como base de sustentação, enquanto Pandy e Berme (Pandy e Berme, 1988) propuseram um método numérico para simular a dinâmica da marcha humana, através de um modelo bidimensional formado por cinco segmentos, e também não considerando os pés. Contudo, estes modelos não produziram respostas suficientemente válidas, devido ao seu grau de simplicidade. Mesmo com modelos de complexidade superior, muitos investigadores constrangeram cinemáticamente partes do seu modelo, como por exemplo, assumindo trajectórias sinusoidais para o movimento dos segmentos corporais relativos ao tronco e à zona pélvica (Becket e Chang, 1968; Chao e Rim, 1973; Townsend, 1981).
Winter e Onyshko (Onyshko e Winter, 1980) modelaram o corpo humano através de um modelo constituído por sete segmentos corporais (dois pés, duas pernas, duas coxas, e um segmento do tipo HAT (Head, Arms e Trunk – Cabeça, braços e tronco), mas o modelo em causa não satisfez os requisitos necessários para uma correcta validação, devido a certos constrangimentos anatómicos (o modelo foi desenvolvido considerando apenas o plano sagital). Modelos de maior complexidade foram posteriormente desenvolvidos (Hemami et al., 1982; Chen et al., 1986), apresentando mais segmentos corporais, maiores graus de
liberdade em cada articulação, contudo nenhuma validação foi totalmente bem sucedida (Winter, 2005).
No entanto, movimentos simples foram modelados com sucesso razoável. Philips et al. (1983) modelaram a oscilação dos membros inferiores humanos usando as acelerações da anca e os momentos de torção associados. Hemami et al. (1982) modelaram o balanço do corpo no plano coronal quando as articulações do joelho estão ―trancadas‖ (com momento de torção nulo e sem movimento de translação).
Uma das principais dificuldades na modelação biomecânica primária residiu na determinação das condições iniciais óptimas. Estes modelos utilizavam molas de modo a representar as características dinâmicas da base dos pés, contudo tal resulta numa aceleração extremamente elevada dos segmentos representativos dos pés, e também apresentam grandes picos na característica de força de reacção com o solo. Este problema foi resolvido aplicando uma componente visco-elástica ao modelo do pé, com um conjunto de sistemas mola-amortecedor em paralelo, por baixo do segmento rígido do pé (Gilchrist e Winter, 1996).
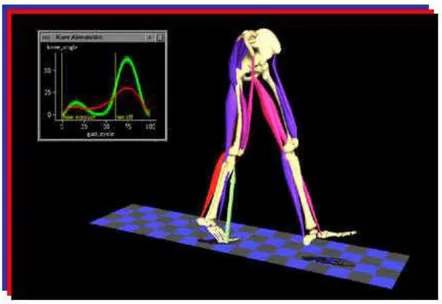
Recentemente, foram desenvolvidos modelos biomecânicos tridimensionais (3D), apresentando melhores resultados. Surgiram diversas ferramentas de modelação e simulação computacional, nas quais se destacam o software OpenSim da SimTek, o SIMM da Musculographics Inc., o ADAMS da MSC Software, entre outros. A Figura ilustra um modelo 3D constituído por nove segmentos, representando a marcha humana, tendo sido desenvolvido recorrendo ao software ADAMS.
Figura 2.5 - Modelo 3D de nove segmentos, representando a marcha humana (Gilchrist e Winter, 1996).
Este modelo apresentou resultados bastante satisfatórios através da utilização dos momentos de torção nas articulações como entradas, molas não lineares para modelar as articulações do joelho, tornozelo e metatarsica-falangeal constrangendo estas articulações à sua gama anatómica. Foram também utilizados sistemas mola-amortecedor de efeito linear, modelando a dinâmica das articulações de modo a obter um padrão estável de movimento (Gilchrist e Winter, 1996). Contudo, este modelo apresentou falhas na simulação após 500 milissegundos devido, ao acumular de erros cinemáticos, resultando no colapso ou queda do corpo modelado (Winter, 2005).
Estes erros devem-se essencialmente à característica inerente ao cálculo da trajectória de um determinado segmento, através da dupla integração da sua aceleração. Os momentos de torção à entrada do modelo, conjuntamente com as forças de reacção, nomeadamente com a de contacto com o solo, originam erros de trajectória, que aumentam ao longo do tempo e que apenas podem ser corrigidos através de uma sintonização fina dos parâmetros de entrada do modelo, neste caso os momentos de torção das articulações (Winter, 2005).
Estes modelos 3D (vd. Figuras 2.6, 2.7 e 2.8) apresentaram um maior grau de complexidade, pelo que apresentam resultados extremamente bons.
Figura 2.6 - Modelo 3D do membro superior humano, desenvolvido em OpenSim.2
Figura 2.7 - Modelo 3D constituído por dez segmentos, vinte e três graus de liberdade e cinquenta e quarto actuadores músculo-tendíneos, desenvolvido em OpenSim (Allison et al.,
2005).3
Figura 2.8 - Modelo 3D do ciclo de marcha humana, desenvolvido em SIMM.4
3 (https://simtk.org/home/opensim) 4
2.3 Síntese da Modelação Neuro-Músculo-Esquelética
Neste capitulo apresentam-se vários desenvolvimentos na área da modelação neuro-músculo-esquelética. Os modelos aqui apresentados, desde o clássico modelo de Hill ao mais recente modelo músculo-tendíneo de Zajac, foram fundamentais enquanto linhas condutoras no desenvolvimento deste trabalho.
Os tópicos aqui apresentados seguem uma ordem especifica, na qual o desenvolvimento do modelo foi baseado. Desde o desenvolvimento do modelo neuro-muscular e a importância vital da dinâmica de activação muscular, aos factores de escala enquanto normalizadores da sua modelação, às propriedades mecânicas dos músculos e modelação mecânica dos actuadores músculo-tendíneos, foi esta a linha de desenvolvimento seguida, de acordo com a estruturação hierárquica e biológica do sistema neuro-músculo-esquelético humano.
2.3.1 Modelo de Hill
Hill desde cedo reconheceu que a elasticidade dos tendões afecta também a força gerada pelo músculo (Hill, 1938; Hill, 1949).
Hill sugeriu que deveria existir um efeito elástico do tipo mola (SE) no músculo (vd. Figura 2.10), com um comprimento único para cada nível de tensão muscular, e que não dependesse da velocidade. Este elemento elástico em série deveria corresponder provavelmente à estrutura e comportamento do tendão, apresentando um valor máximo de declive na tensão muscular, face a 2 % de variação do comprimento do músculo (Freivalds, 2004).
Figura 2.9 - Relação Força – Comprimento muscular para um componente elástico em série (Ritchie, et al., 1958).
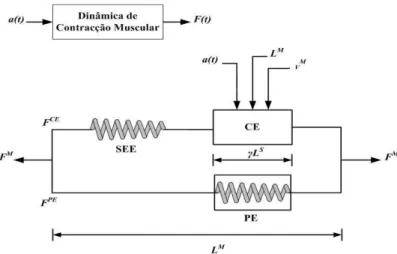
As curvas passivas de tensão (vd. Figura 2.9) sugerem que também deveria existir um elemento elástico em paralelo (PE) que se opunha ao estiramento passivo do músculo. Este elemento consistia no tecido conjuntivo que se encontrava em paralelo com as miofibrilas musculares. A relação força – velocidade (i.e., a força muscular é máxima quando a velocidade é zero) sugere que deveria existir uma resistência dinâmica ao próprio movimento do músculo e, como tal, a força muscular seria dissipada. Contudo, Hill propôs que um elemento contráctil (CE) consistia num puro gerador de força com um elemento de amortecimento (DE) em paralelo (Freivalds, 2004). Todos estes elementos foram depois combinados no que ficou conhecido como o modelo muscular de quatro elementos de Hill, (vd. Figura 2.10).
Figura 2.10 - Modelo do tipo Hill descrevendo a dinâmica da contracção do tecido muscular (adaptado de Zajac, 1989).
O modelo conceptual do tipo de Hill é caracterizado pelo facto de as propriedades do tecido muscular poderem ser representadas pela relação força-comprimento-velocidade (flv) controlada pela activação muscular (vd. Figura 2.10). Basicamente, é constituído por um elemento passivo em paralelo com um elemento contráctil admitindo que contribuem para a geração de força muscular Fm. A força FCE é assumida como dependendo apenas do comprimento muscular actual Lm, da velocidade vm e da activação muscular a(t). Por vezes, a componente elástica do músculo, distinguível da elasticidade do tendão, é incluída em série (SEE) com o elemento contráctil (Zajac, 1989; Cecchi, et al., 1986). O comprimento do CE resulta da soma dos comprimentos dos γ sarcómeros (vd. Guyton e Hall, 2003) da fibra muscular (γ.LS) e, difere do comprimento da fibra muscular Lm (Zajac, 1989).
Uma razão para não incluir o elemento elástico SEE no modelo, reside no facto de em situações contrárias à noção básica de sarcómero e, das fibras musculares actuarem em harmonia, poder levar a situações desconcertantes em relação a este aspecto. Por exemplo, com um músculo contendo o elemento SEE, o comprimento da fibra muscular não poderia ser escalável em situações em que as propriedades dos sarcómeros são estáticas. Na figura 2.10, pode-se constatar que o comprimento do sarcómero LS multiplicado pelo número total de sarcómeros γ, corresponde ao comprimento do elemento contráctil. Desta forma, o comprimento da fibra muscular e dos seus sarcómeros não será proporcional devido ao estiramento provocado no músculo que contém o elemento SEE. Consequentemente, a relação força-comprimento (fl) da fibra muscular não será mais que um comprimento escalável através da relação fl do sarcómero. A relação fl da fibra muscular será por outro lado, uma distorção da relação fl do sarcómero (Zajac, 1989; Wilkie e Richie, 1958).
Para além destes factos, num músculo com elemento SEE, a velocidade da fibra muscular não será uma unidade escalável a partir da velocidade do sarcómero. Considere-se por exemplo, o caso em que as fibras musculares são isométricas (vd. Guyton e Hall, 2003) e encontram-se inicialmente em repouso. A força muscular irá aumentar gradualmente até ao seu valor isométrico, correspondente à activação total, uma vez que o comprimento dos sarcómeros, como é evidenciado no comprimento do elemento CE (γ.LS), torna-se menor à medida que o elemento muscular SEE alonga. Desta forma, as fibras musculares serão isométricas (i.e. o comprimento das fibras musculares será constante), contudo o
comprimento dos sarcómeros será menor (i.e. o comprimento do CE será menor) (Zajac, 1989).
No caso de um tendão e um músculo irem constituir um sistema linear, as propriedades de tal sistema poderão ser indistinguíveis das propriedades de um modelo muscular contendo apenas o elemento em série SEE. Por outro lado, a rigidez muscular terá de ser modelada quando os actuadores de encurtamento do tendão forem submetidos a variações rápidas de comprimento. A razão principal deve-se ao facto de o regime transitório da força ser fortemente dependente da rigidez muscular. Contudo, a modelação da rigidez ou de movimentos em que regimes transitórios rápidos desempenham um papel importante (por exemplo, na coordenação muscular durante uma corrida), deverão provavelmente conduzir a modelos de maior complexidade do que o simples modelo de Hill (Zajac, 1989).
2.3.2 Modelo de Zajac
Uma das versões mais interessantes do modelo de Hill é a formulada por Felix E. Zajac. Possui diversas qualidades que o tornam conveniente para simulações da dinâmica do sistema músculo-esquelético. A sua principal característica é a importância que assume a mecânica do tendão, como vínculo mecânico entre o elemento contráctil do músculo e a força exercida entre as extremidades do músculo (Zajac, 1989). Outro aspecto interessante é a sistematização que consegue realizar, partindo de relações genéricas força-velocidade, força-deslocamento e de rigidez no tendão. Todas as variáveis de entrada: activação muscular, velocidade e comprimento do actuador músculo-tendíneo, e resposta: força na extremidade do tendão, encontram-se adimensionalizadas.
Conhecendo-se o comprimento óptimo, a velocidade máxima de encurtamento do elemento contráctil sem carga, a força máxima isométrica e o comprimento do tendão relaxado, podem ser utilizadas relações genéricas da dinâmica de activação e de contracção. A Figura 2.11 apresenta o diagrama de blocos para um actuador músculo-tendíneo genérico, segundo a proposta de Zajac. Numa determinada operação de um membro, por exemplo a flexão do cotovelo, um músculo sofre um processo de encurtamento: pode-se observar a variação do comprimento e da velocidade do músculo, a partir de um dispositivo de medição adequado (como por exemplo, um extensómetro). O grau de activação muscular a(t) é obtido por uma filtragem passa-baixo do sinal de excitação neuronal u(t), estimável a partir do
registo electromiográfico do músculo (vd. subcapítulo 2.3.4). Subtraindo da velocidade de encurtamento do actuador músculo-tendíneo a velocidade do musculo é obtida a velocidade de encurtamento do tendão; multiplicando este valor pela rigidez do tendão, é encontrada a derivada temporal da força no tendão, integrada de seguida. Se o ângulo de inclinação das fibras musculares α(t) for desprezável, a força muscular é a mesma do tendão, podendo ser utilizada para estimar a velocidade do músculo.
Figura 2.11 - Diagrama de blocos do modelo de Zajac (adaptado de Zajac, 1989).
2.3.3 Modelo do Par Excitação – Contracção
A informação contida na excitação neuronal da unidade motora encontra-se contida na sequência de descargas que ocorrem nestas unidades. Uma vez que a descarga efectuada pelas fibras musculares enervadas ocorre em sincronia entre si e entre as descargas efectuadas pela fibra neuronal e as suas ramificações, esta excitação do tecido neuronal e muscular é denominada de excitação neuromuscular ou simplesmente excitação neuronal.
A excitação neuronal u(t) encontra-se acoplada à unidade motora através de uma variável intermédia denominada activação muscular a(t) sendo, por definição, idêntica à noção original de ―estado activo‖ (Hill, 1938; Hill, 1949) do modelo de Hill. O par excitação-contracção (EC) é mediado pela dinâmica cálcica (Huxley et al., 1974; Zahalak et al., 1988). A cinética associada ao processo intracelular da activação do cálcio e desactivação da unidade contráctil é geralmente aproximada por uma dinâmica de primeira ordem de modo a simular (de forma lenta) a reacção químico-cinética dominante do par EC (Taylor, 1969). Uma
característica importante da dinâmica de activação do para EC é a taxa de activação neuromuscular ser superior à de desactivação (Zajac, 1989).
Virtualmente, todos os modelos utilizados no estudo da coordenação de segmentos do corpo assumem que a dinâmica de activação está desacoplada da subsequente geração de força (i.e. dinâmica da contracção muscular). Contudo, alguns estudos in vivo sugerem que o acoplamento do par EC e da mecânica das pontes-cruzadas (vd. Guyton e Hall, 2003), através do tecido muscular, não está devidamente clarificado e longe de estar resolvido. Por uma questão de simplicidade, assume-se que a dinâmica de activação e de contracção muscular se encontram desacopladas (Zajac, 1989).
2.3.4 Associação entre a Activação Muscular e a Força Isométrica
O registo da força isométrica do músculo activo, é sempre um meio de medição da activação muscular, específica de uma determinada excitação neuronal. Num modelo desprovido do elemento SEE, a força muscular variante no tempo FCE(t) é função de a(t), vm(t) e de Lm(t) (vd. Figura 2.10). Numa contracção isométrica, Lm é constante e vm é nula. FCE(t) é então, dada apenas pela excitação variante no tempo a(t). Uma vez que a(t) é assumida como medida de escala da curva muscular activa e isométrica fl, e Lm é constante, a força muscular activa FCE(t) é proporcional à activação muscular a(t), numa contracção isométrica (Zajac, 1989).
Contudo, se o modelo incluir o elemento SEE, FCE(t) deverá retardar com a(t). Uma vez dada esta correspondência entre força isométrica e activação muscular, a activação muscular constitui uma função complexa da sequência de pulsos neuronais. A razão pela qual isso acontece prende-se com o facto de depender de forma complexa das excitações passadas, constituído um sistema causal. Contudo, modelos não lineares do par EC baseados na dinâmica cálcica, podem modelar muitas destas propriedades referenciadas (Demieville et al., 1980; Zajac, 1989).
A partir da associação entre activação muscular e força muscular isométrica, experiências realizadas em diferentes músculos, através de dispositivos de medição FES, permitiram concluir que o registo da força não representa a activação do músculo, mas sim, devido ao encurtamento da fibra muscular, um filtro passa-baixo da activação (Zajac, 1989).
2.3.5 Modelos Musculares do Tipo SISO
Idealmente, um modelo muscular deve ter em conta as características individuais das unidades motoras. Apesar de tudo, são as descargas dos neurónios motores individuais que excitam as unidades motoras individuais, que por sua vez geram de forma colectiva, a força muscular. Nenhuma representação complexa do músculo foi utilizada no desenho de modelos para o estudo da coordenação motora, nem tal complexidade é justificada (Zajac, 1989). De facto, muito poucos trabalhos experimentais foram desenvolvidos com vista a testar o conceito, de que a soma das forças desenvolvidas por cada uma das unidades motoras, produz força muscular (Winter, 2005). De forma similar, muito poucos modelos foram desenvolvidos com o intuito de estudar a integração da capacidade de geração de força muscular por parte das unidades motoras, que por sua vez são simultaneamente controladas (excitadas) pelos dessincronizados trens de pulsos nervosos. Também não é usual encontrar modelos que estimem a força colectiva de saída do músculo, sendo esta composta por diferentes tipos de unidades motoras, todas ou na sua maior parte, completamente excitadas (a(t) = 1).
A maior parte dos modelos musculares utilizados em estudos computacionais são do tipo SISO (Single Input-Single Output), ou seja, uma entrada e uma saída. Muitos desses modelos assumem que grande parte do sistema pode ser adequadamente representado por uma dinâmica de primeira ordem, associado à dinâmica de contracção. Desta forma, a excitação neuronal u(t) actua através de uma dinâmica de activação de primeira ordem de modo a produzir uma rede de activações musculares a(t).
Esta relação flv, em conjunto com a elasticidade do tendão, estabelece uma dinâmica músculo-tendínea de primeira ordem. Uma vez que a componente SEE é excluída, o tendão deve ser incluído na dinâmica de contracção muscular de modo a torná-la uma dinâmica de primeira ordem. Caso o músculo contenha uma componente SEE, esta dinâmica deve ser incluída no processo, mesmo que não haja dinâmica tendínea. Caso contrário, a dinâmica de contracção muscular é mais uma vez de primeira ordem e o termo dinâmica de contracção músculo-tendínea ainda será significativo (Zajac, 1989).
1. As dinâmicas que descrevem a actividade motora tornam-se de dimensão elevada. Para um modelo muscular de segunda ordem, o número de variáveis de estado é (2m+2n), onde m é o número de músculos e n o número de graus de liberdade do sistema mecânico utilizado para o modelo da coordenação. A interpretação dos dados provenientes da simulação, aliados a este número de variáveis de estado, representa um grande desafio intelectual e o tempo de computação é tanto maior quanto maior for (m+n) (Zajac, 1989).
2. As variáveis de estado associadas à força desenvolvida pelos músculos (i.e. Fm ou, de forma equivalente, a força tendínea) podem ser comparadas com as forças calculadas a partir de dados experimentais. Por exemplo, a rede de momentos de força associados a cada junta, produzidos a partir dos actuadores que ―cruzam‖ essa mesma junta, podem ser calculados a partir da análise da dinâmica inversa dos dados biomédicos experimentais (Gottlieb et al., 1970). Esta rede de momentos de força muscular pode ser comparada com os momentos de força obtidos a partir de simulações da actividade motora, que deve conter tanto um modelo para a força desenvolvida por cada actuador como um modelo para cada um dos braços de força (i.e. modelo da geometria músculo-esquelética) (Zajac, 1989; Hof et al., 1987).
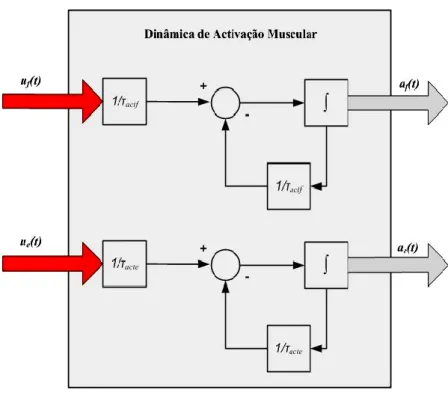
3. A variável de estado associada à activação muscular a(t) e a excitação neuronal de entrada u(t) pode também ser relacionada com dados experimentais. Por exemplo, registos experimentais de EMG podem ser processados para comparação com a excitação muscular e os sinais de activação. Os envelopes dos sinais EMG rectificados e filtrados, podem ser comparados com u(t) e a(t) respectivamente (Zajac, 1989; Hof et al., 1987; Gottlieb, et al., 1971). Uma dinâmica de primeira ordem pode ser utilizada para representar o processo de activação-EMG, incluindo uma equação diferencial bilinear:
(2.1) 0 < β = const. < 1
onde:
τ
act, tempo de activação (quando o músculo está completamente excitadou(t) = 1).
(2.2 a, b)
τ
desact= τ
act/
β, tempo de desactivação (quando o músculo estádesactivado u(t) = 0, com 0 < β = const. < 1
De notar que a taxa associada à dinâmica de primeira ordem depende da excitação u(t), quando u(t)>0. Contudo, quando o músculo se encontra totalmente excitado (u(t) = 1), a dinâmica de activação é assumida como sendo mais rápida quando a taxa constante é de 1 / τact, e é
mais lenta quando u(t) = 0, o que acontece apenas quando a taxa é β / τact. De
forma equivalente, este modelo assume que a constante de tempo responsável pelo aumento da activação de um músculo completamente excitado (τact) é
menor que a constante de tempo de um músculo completamente relaxado (τdesact). Desta forma, β é o parâmetro que especifica o rácio entre estas duas
constantes de tempo. Uma vez que a activação e a força isométrica são proporcionais, uma das consequências deste modelo é a força isométrica activa aumentar de forma mais rápida, durante a excitação do músculo, do que decresce durante o seu tempo de relaxamento (Zajac, 1989).
A actividade electromiográfica em bruto aumenta, tanto com a taxa de disparo das unidades motoras individuais, como com as unidades inactivas que são recrutadas para o estado activo. A rectificação do sinal EMG em bruto pode ser considerado como sendo a excitação neuronal do músculo u(t), tendo em conta todas as unidades individuais (Σui(t)).
Filtrando o sinal EMG rectificado, obtém-se a rede de activações musculares (Σai(t)), pelo que
as características de um filtro passa-baixo correspondem à dinâmica de activação (Zajac, 1989).
2.3.6 Factores de Escala na Modelação Muscular
Existem diversas maneiras de se estudar a coordenação muscular, e tal como na modelação de sistemas de grande escala, compromissos entre a simplicidade e complexidade na estrutura dos modelos, e entre alguns parâmetros, devem ser realizados. De modo a se compreender de que forma é que os músculos afectam a coordenação dos segmentos do corpo, alguns segmentos, em particular, devem ser estudados, incluindo os respectivos músculos associados. Para que a interacção dos segmentos corporais e respectivos músculos seja garantida, deverá ser desenvolvido um modelo muscular genérico em que a sua escala seja definida a partir de uma série de parâmetros representativos de um determinado músculo. De acordo com as razões acima indicadas, torna-se razoável a formulação de um modelo genérico do tipo SISO, baseado nas seguintes propriedades materiais do músculo:
1. Factores de escala da curva força-deslocamento do músculo passivo;
2. Factores de escala da curva força-deslocamento do músculo activo;
3. Factores de escala da curva força-velocidade;
4. Factores de escala da equação de primeira ordem que expressa a dinâmica de activação (2.1).
Com esta formulação, os parâmetros específicos dos músculos necessários à definição de uma escala dimensional das propriedades materiais acima descritas, de forma a gerar as propriedades estruturais e dinâmicas do músculo, são:
1. O pico da força isométrica do músculo activo (F0m);
2. O comprimento óptimo da fibra muscular (L0m);
3. O ângulo de ―inclinação‖ óptimo da fibra muscular (α0), quando Lm = L0m;
4. A velocidade máxima de encurtamento do músculo vm, normalizada através de L0m
( ), onde:
(2.3)
é denominada de velocidade muscular normalizada em relação ao comprimento óptimo da fibra muscular L0m e:
(2.4)
é denominado de parâmetro de escala temporal, com unidades em segundos. Um parâmetro de tempo dimensional pode ser definido a partir de 2.2:
(2.5)
Desta forma, o eixo da velocidade da curva fv é normalizada a partir de
,
assim como a força muscular é normalizada a partir de F0m e o eixo do comprimento da
tempo de activação e de desactivação, assim como a dinâmica da activação muscular podem ser normalizadas a partir do parâmetro de escala temporal τc (Zajac, 1989):
, tempo de activação dimensional.
(2.6 a, b) , tempo de desactivação dimensional.
Substituindo 2.5 e 2.6 em 2.1, obtém-se: (2.7) 0 < β = const. < 1
Em que constitui o rácio entre estas duas constantes temporais (Zajac, 1989).
2.3.7 Modelação Mecânica dos Tendões
O tendão consiste numa porção externa do músculo esquelético (tendão externo) e, numa porção interna do músculo esquelético (tendão interno), como ilustra a figura 2.13. Este pode ser definido a partir da sua secção transversal AT e do seu comprimento LT, dependendo por sua vez da elasticidade εT e tensão σT na sua secção transversal (Zajac, 1989)
Figura 2.13 – Relação entre as fibras musculares com um ângulo de inclinação α e o tendão (Zajac, 1989).