doi: 10.5540/tema.2018.019.02.0235
Controle de um Sistema de Navegac¸˜ao de um Robˆo Ambiental H´ıbrido
por meio de um Sistema de Inferˆencia Fuzzy Hier´arquico
C.J. G ´OMEZ, M. VELLASCO*e R. TANSCHEIT
Recebido em 4 de maio de 2017 / Aceito em 5 de dezembro de 2017
RESUMO. Apresenta-se, neste artigo, o desenvolvimento completo de um sistema de navegac¸˜ao auxiliar baseado na L´ogica Fuzzy para um robˆo m´ovel denominado Robˆo Ambiental H´ıbrido M´edio (RAHM). Apresenta-se tamb´em o projeto eletrˆonico e a programac¸˜ao do sistema de navegac¸˜ao. O desempenho deste sistema ´e avaliado frente ao do Sistema Principal de Navegac¸˜ao do RAHM.
Palavras-chave: L´ogica Fuzzy; Navegac¸˜ao; Rob´otica autˆonoma; Controle.
1 INTRODUC¸ ˜AO
A explorac¸˜ao de ´oleo e g´as na floresta amazˆonica teve como um de seus resultados a construc¸˜ao de um gasoduto ao longo do rio Solim˜oes, ligando as cidades de Coari a Manaus. Devido ao impacto que tal atividade provoca na natureza, as atividades de produc¸˜ao e transporte de ´oleo e g´as na regi˜ao e seus potenciais impactos socioambientais merecem constante acompanhamento. Pesquisadores e t´ecnicos percorrem o Rio Solim˜oes trimestralmente para colher amostras e dados sobre o ecossistema e as populac¸˜oes humanas. No entanto, h´a uma s´erie de dificuldades para a coleta de tais amostras, como a constante presenc¸a de animais selvagens e insetos transmissores de doenc¸as, al´em da inacessibilidade de certos lugares como regi˜oes de plantas flutuantes [12].
A ind´ustria brasileira tem desenvolvido novas abordagens para as tarefas de monitoramento e inspec¸˜ao de gasodutos. Para possibilitar a coleta de informac¸˜oes e amostras de uma maneira se-gura nas ´areas remotas, bem como para estabelecer pontos m´oveis de monitoramento ambiental, foi desenvolvido pelo Centro de Pesquisas da Petrobras (CENPES) o Robˆo Ambiental H´ıbrido (RAH) [12]. Este robˆo m´ovel, dotado de equipamentos para a coleta de informac¸˜ao, deveria sa-tisfazer os requisitos exigidos pelo ambiente amazˆonico, com capacidade de se movimentar em terra firme, pˆantano, lama, areia, brejos e terrenos irregulares. Os testes realizados demonstraram que o RAH (Figura 1), dotado de um sistema de navegac¸˜ao, foi capaz de atender aos requisitos acima [2], podendo ser empregado na coleta de amostras da fauna e flora local, em medic¸˜oes
*Autor correspondente: M. Vellasco – E-mail: [email protected]
de parˆametros f´ısico-qu´ımicos do meio e ainda na detecc¸˜ao de n´ıveis de g´as metano em regi˜oes alagadas como decorrˆencia da construc¸˜ao de usinas hidroel´etricas.
Figura 1: Prot´otipo RAH 2011. Fonte Relat´orio Ativatec.
Aprimoramentos nas partes mecˆanica e eletrˆonica e na capacidade de navegac¸˜ao autˆonoma de-ram origem a uma nova vers˜ao do RAH, denominada Robˆo Ambiental H´ıbrido M´edio (RAHM) (Figura 2) [5], destinado a operar na regi˜ao do gasoduto Coari-Manaus. A palavraM´edioindica que o RAHM ´e um pouco menor do que o RAH. Exige-se deste robˆo a capacidade de se desviar de obst´aculos e de detectar rotas mais adequadas para atingir objetivos estabelecidos.
Figura 2: Vers˜ao atual do RAHM.
resume o desenvolvimento deste sistema, extensivamente abordado em [5] – para operar em caso de falha do SPN –, incluindo o projeto da eletrˆonica e do Sistema de inferˆencia Fuzzy. O desempenho do Sistema Auxiliar de Navegac¸˜ao ´e comparado ao do Sistema Prim´ario, inclusive no que diz respeito `a relac¸˜ao custo-benef´ıcio de cada um deles.
2 CONTROLE DO RAHM
Conforme mencionado, o RAHM ´e um prot´otipo rob´otico cujo objetivo principal ´e o monito-ramento do entorno do gasoduto Coari-Manaus. O RAHM possui trˆes tipos de funcionamento: autom´atico, teleoperado e semiautom´atico.
No modo autom´atico, o RAHM ´e completamente autˆonomo e baseia a sua navegac¸˜ao em equi-pamentos sofisticados – sensores a laser e cˆameras –, que fornecem informac¸˜oes para o Sistema Prim´ario de Navegac¸˜ao (SPN). Este faz uso de um computador remoto e de um computador embarcado para processar os dados e definir os sinais que ser˜ao enviados aos atuadores.
No modo de teleoperac¸˜ao, o RAHM responde somente `a trac¸˜ao, cˆamera IP e canal de comunicac¸˜ao, ou seja, os equipamentos vitais para que o operador possa movimentar o robˆo at´e atingir uma zona segura para inspec¸˜ao e reparac¸˜ao.
O modo semiautom´atico ´e uma opc¸˜ao para situac¸˜oes de falha ou de emergˆencia que afetem a operac¸˜ao do SPN. Equipamentos s˜ao desligados e a navegac¸˜ao se d´a por meio de instrumen-tos mais simples, com o objetivo de poupar energia e recursos computacionais. O Sistema Au-xiliar de Navegac¸˜ao (SAN), descrito a seguir, foi desenvolvido para atuar exatamente nestas circunstˆancias, de forma a assegurar um funcionamento m´ınimo mas ainda adequado.
3 SISTEMA AUXILIAR DE NAVEGAC¸ ˜AO
No desenvolvimento do SAN, estabeleceu-se que ele deveria apresentar consumo de energia m´ınimo, custo financeiro e computacional baixo e simplicidade no cumprimento do objetivo geral. Estes objetivos nortearam as escolhas dos equipamentos (placa Arduino e sensores de ultrassom, por exemplo). O desenvolvimento compreendeu o projeto eletrˆonico, selec¸˜ao de equi-pamentos, programac¸˜ao, enlaces de comunicac¸˜ao, entre outras tarefas, conforme detalhado em [5]. Os cinco m´odulos do SAN s˜ao apresentados na Figura 3: M´odulo de Sensores, M´odulo Processador, M´odulo de Comunicac¸˜ao, M´odulo PC Remoto e M´odulo de Atuac¸˜ao.
O m´odulo de sensores ´e encarregado de adquirir a informac¸˜ao do entorno do robˆo e o processador (placa Arduino MEGA) tem a func¸˜ao de codificar e interpretar essa informac¸˜ao. O m´odulo de comunicac¸˜ao ´e respons´avel pela troca de informac¸˜ao, via radiofrequˆencia, entre o robˆo e o com-putador remoto, onde o SIF est´a implementado. Este m´odulo compreende oswitche os r´adios transmissor e receptor. Os atuadores tˆem a func¸˜ao de locomover o robˆo de acordo com as sa´ıdas fornecidas pelo SIF.
Figura 3: M´odulos do Sistema Auxiliar de Navegac¸˜ao.
trabalhos dispon´ıveis na literatura [4] [15] [3]. A disposic¸˜ao final dos sensores ´e apresentada na Figura 4, onde se observam os cinco sensores de ultrassom: trˆes na parte frontal do robˆo – ´area mais importante em se tratando de navegac¸˜ao –, um na lateral esquerda e um na lateral direita. H´a tamb´em um sensor angular, localizado na parte central do robˆo.
Figura 4: Distribuic¸˜ao dos sensores de ultrassom.
3.1 Sistema de Inferˆencia Fuzzy Geral
hier´arquico, reduzindo-se, assim, o n´umero total de regras. Um menor n´umero de regras n˜ao apresenta vantagem significativa do ponto de vista operacional, mas torna mais simples a tarefa dos especialistas na construc¸˜ao das bases de regras e tamb´em favorece a interpretabilidade. As-sim, o SIF Geral ´e composto por dois subsistemas de inferˆencia fuzzy: o Sistema Intermedi´ario (SIF1), identificado na Figura 5 pelo m´odulo ” ´Area Frontal”, e o Sistema de Controle (SIF 2) pro-priamente dito, identificado pelo m´odulo ”Sistema”. O SIF1 obt´em a informac¸˜ao dos obst´aculos `a frente do robˆo – distˆancia para os obst´aculos e a sua orientac¸˜ao em relac¸˜ao ao objetivo. O SIF 2 recebe a informac¸˜ao de sa´ıda do sistema intermedi´ario e, juntamente com os sensores que de-tectam obst´aculos nas zonas laterais, fornece os valores de sa´ıda para os atuadores. Observe-se que o SIF Geral possui as seis entradas acima referidas: sinais de cinco sensores de ultrassom e de um sensor angular.
Figura 5: Sistema de Inferˆencia Fuzzy Geral.
O comportamento do robˆo ´e resultado da diferenc¸a de velocidade angular entre os pares de motores do lado esquerdo e os pares de motores do lado direito. S˜ao necess´arias, portanto, as duas sa´ıdas mostradas na Figura 5. Uma sa´ıda envia o mesmo valor para os dois motores do lado esquerdo (PM1) e a outra envia a informac¸˜ao para os dois motores do lado direito (PM2). Assim, a trajet´oria a ser percorrida pelo robˆo ´e determinada pela diferenc¸a de velocidades angulares entre PM1 e PM2 (vide Figura 6).
3.2 SIF1: Sistema Intermedi´ario
Como a informac¸˜ao referente `a parte frontal ´e vital para o robˆo lograr se desviar de obst´aculos, trˆes dos cinco sensores de ultrassom s˜ao colocados nessa regi˜ao. A informac¸˜ao fornecida por estes trˆes sensores, juntamente com a do sensor angular, ´e respons´avel pela capacidade de o robˆo se desviar de obst´aculos. A partir dos sinais recebidos destes quatro sensores, o Sistema Intermedi´ario (Figura 7) fornece como sa´ıdas a orientac¸˜ao a ser seguida pelo robˆo e a distˆancia m´edia geral dos obst´aculos na zona frontal.
Figura 7: Sistema Intermedi´ario.
As duas sa´ıdas intermedi´ariasdirec¸˜aoedistˆancia frontals˜ao defuzzificadas e utilizadas como entradas do SIF2 (Sistema de Controle).
3.2.1 Vari´aveis de Entrada
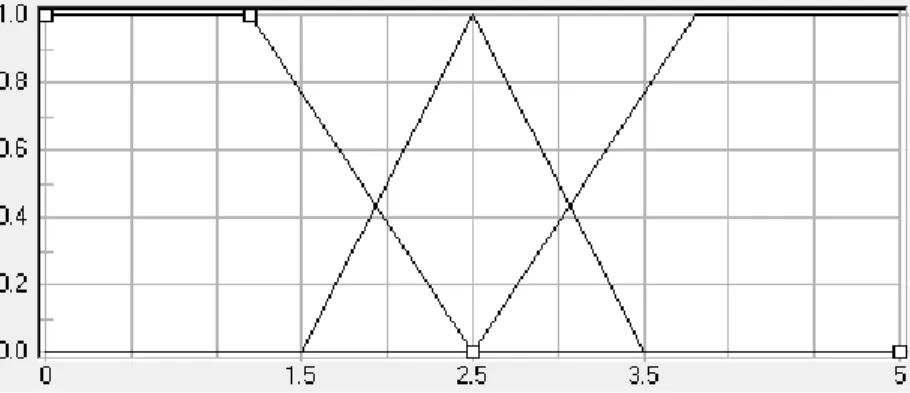
Os sensores de ultrassom oferecem a informac¸˜ao de distˆancia de qualquer obst´aculo que seja detectado em uma faixa de 30 cm a 5 metros na linha de vis˜ao do robˆo. O sensor angular fornece a orientac¸˜ao da frente do robˆo em relac¸˜ao ao objetivo, isto ´e, o ˆangulo de desvio em relac¸˜ao a um alvo previamente especificado. Apresentam-se a seguir os termos lingu´ısticos (con-forme nomenclatura utilizada em [5]) e os conjuntos fuzzy, definidos por func¸˜oes de pertinˆencia, correspondentes `as vari´aveis de entrada consideradas.
• Distˆancia ao Obst´aculo (Ultrassom1, 2 e 3): as func¸˜oes de pertinˆencia para as trˆes en-tradas do Sistema Intermedi´ario (dados de trˆes sensores) que dizem respeito `a distˆancia do obst´aculo s˜ao mostradas na Figura 8, cabendo a elas os seguintes termos lingu´ısticos: Close, MediumeFar.
Figura 8: Distˆancia ao Obst´aculo.
Figura 9: ˆAngulo de desvio.
3.2.2 Vari´aveis de Sa´ıda
As sa´ıdas do SIF1 s˜ao: distˆancia m´edia em relac¸˜ao ao obst´aculo que se encontra `a frente do robˆo (Distˆancia Frontal) e ˆangulo de direc¸˜ao (Direc¸˜ao) que o robˆo deve seguir para manter a sua trajet´oria at´e a posic¸˜ao desejada.
Para a sa´ıda Distˆancia Frontal, os termos lingu´ısticos e func¸˜oes de pertinˆencia s˜ao idˆenticos aos utilizados para as entradas relativas `a distˆancia (Figura 8). Para a sa´ıda Direc¸˜ao, as func¸˜oes de pertinˆencia s˜ao iguais `as mostradas na Figura 9 para a vari´avel de entrada ˆAngulo de Desvio, com os termos lingu´ısticosVery Left, Left, Center, RighteVery Right.
3.2.3 Base de Regras
IF (SensorAngular IS High Left) AND (Ultrassom1 IS Medium) AND (Ultrassom2 IS Close) AND (Ultrassom3 IS Medium) THEN Dist Frontal IS Close AND Direcao IS Very Right
IF (SensorAngular IS Medium Left) AND (Ultrassom1 IS Close) AND (Ultrassom2 IS Close) AND (Ultrassom3 IS Close) THEN Dist Frontal IS Close AND Direcao IS Very Right
IF (SensorAngular IS Center) AND (Ultrassom1 IS Far) AND (Ultrassom2 IS Close) AND (Ultrassom3 IS Close) THEN Dist Frontal IS Close AND Direcao IS Left
IF (SensorAngular IS Medium Right) AND (Ultrassom1 IS Medium) AND (Ultrassom2 IS Medium) AND (Ultrassom3 IS Medium) THEN Dist Frontal IS Medium AND Direcao IS Left
IF (SensorAngular IS High Right) AND (Ultrassom1 IS Far) AND (Ultrassom2 IS Far) AND (Ultrassom3 IS Far) THEN Dist Frontal IS Far AND Direcao IS Very Left
3.3 SIF2: Sistema de Controle
Este sistema (SIF2) recebe como entradas os valores defuzzificados do SIF1, al´em das informac¸˜oes dos sensores localizados nas zonas laterais do robˆo, e fornece na sa´ıda a informac¸˜ao para os pares de motores. A Figura 10 apresenta a estrutura do SIF2, com suas quatro entradas e duas sa´ıdas.
Figura 10: Sistema de Inferˆencia 2 (Sistema de Controle).
3.3.1 Vari´aveis de Entrada
Como mencionado, s˜ao quatro as vari´aveis de entrada deste sistema:
• Distˆancias ao Obst´aculo: fornecidas pelos sinais dos sensores de ultrassom localizados nas laterais direita (sensor ultrassom 4) e esquerda (sensor ultrassom 5), possuem as mesmas caracter´ısticas dos sensores de ultrassom do Sistema intermedi´ario.
3.3.2 Vari´aveis de Sa´ıda
Conforme mencionado, o SIF 2 fornece as duas sa´ıdas que ser˜ao utilizadas para acionar o par de motores ilustrado na Figura 6. Valores de tens˜ao proporcionais ao valores resultantes do processo de inferˆencia – entre -5000 rpm e 5000 rpm – s˜ao fornecidos aos motores de trac¸˜ao. O sinal positivo ou negativo informa o sentido de rotac¸˜ao do motor, que corresponde ao movimento para frente ou para tr´as do robˆo. A velocidade m´axima do robˆo ´e de 1m/s.
Na Figura 11 s˜ao apresentadas as func¸˜oes de pertinˆencia correspondentes `as vari´aveis de sa´ıda do SIF 2, distribu´ıdas em um universo de discurso abrangendo valores entre -5000 e +5000. Os termos lingu´ısticos a elas associados s˜ao:Rever,Slow,MediumeFast. A distribuic¸˜ao assim´etrica das func¸˜oes de pertinˆencia deve-se `a necessidade de se ter um controle mais fino quando o robˆo se movimenta para a frente. Quando h´a um bloqueio total `a frente e nas laterais, o robˆo deve se deslocar para tr´as (Rever) at´e atingir uma regi˜ao mais livre. Neste caso, o controle n˜ao necessita ser t˜ao fino.
Figura 11: Vari´aveis de sa´ıda.
3.3.3 Base de Regras
A exemplo do SIF Intermedi´ario, o n´umero de regras poss´ıveis ´e 135 (dispon´ıveis em [5]); a seguir apresentam-se alguns exemplos de regras:
IF (Direcao IS Very Left) AND (Dist Frontal IS Far) AND (Ultrassom4 IS Medium) AND (Ultrassom5 IS Medium) THEN PM1 IS Medium AND PM2 IS Fast
IF (Direcao IS Center) AND (Dist Frontal IS Close) AND (Ultrassom4 IS Close) AND (Ultrassom5 IS Close) THEN PM1 IS Rever AND PM2 IS Rever
IF (Direcao IS Right) AND (Dist Frontal IS Close) AND (Ultrassom4 IS Medium) AND (Ultrassom5 IS Close) THEN PM1 IS Fast AND PM2 IS Slow
IF (Direcao IS Very Right) AND (Dist Frontal IS Far) AND (Ultrassom4 IS Close) AND (Ultrassom5 IS Medium) THEN PM1 IS Medium AND PM2 IS Fast
3.3.4 Defuzzificac¸˜ao
Para os dois SIFs, utilizou-se o m´etodo de centro dos m´aximos [14].
3.4 Implementac¸˜ao do SIF Geral
O SIF hier´arquico apresentado nas sec¸˜oes anteriores foi programado em uma plataforma que permitia a sua conex˜ao com os dispositivos existentes no projeto eletrˆonico. A ferramenta Vi-sual Studio [1] foi a escolhida, pois apresenta os seguintes requisitos fundamentais para a programac¸˜ao do SIF:
• Possui componente para receber dados atrav´es da porta ethernet, j´a que os dados obtidos pelos sensores s˜ao enviados por radio frequˆencia ao PC remoto, o qual os recebe pela porta ethernet.
• Possui componente para enviar dados atrav´es da porta serial, pois as ordens de con-trole dadas pelo controlador fuzzy s˜ao enviadas aos atuadores das rodas atrav´es da placa conversora RS232/Ethernet pela porta serial.
• Permite o desenvolvimento de uma interface gr´afica para o monitoramento de todas as vari´aveis de entrada e sa´ıda.
• Possui biblioteca de L´ogica Fuzzy na ferramenta.
Desenvolveu-se uma interface, conforme mostrado na Figura 12, para realizar o monitoramento de todas as informac¸˜oes do robˆo em tempo real. A parte esquerda da interface apresenta uma imagem do RAHM, com a distribuic¸˜ao dos cinco sensores de ultrassom (trˆes frontais e dois laterais) e seus respectivos valores. Na parte inferior do lado esquerdo, pode-se visualizar o dado recebido do sensor angular. Na parte central, visualizam-se os dois valores de sa´ıda do Sistema Intermedi´ario: direc¸˜ao e a distˆancia m´edia da zona frontal.
Figura 12: Interface Gr´afica de monitoramento.
4 EXPERIMENTOS E RESULTADOS
Para avaliar o comportamento do Sistema de Navegac¸˜ao Auxiliar frente ao do Sistema de Navegac¸˜ao Prim´ario, foram criados dez cen´arios controlados (distribuic¸˜oes de obst´aculos). Esta comparac¸˜ao envolveu, al´em das trajet´orias percorridas, itens como custo financeiro, custo com-putacional, consumo de energia, tempo de percurso e fluxo de dados. Recorde-se que o projeto do SAN pretendia aliar um desempenho satisfat´orio com custo baixo.
Os dez experimentos foram realizados em um mesmo ambiente plano, de 50m x 30m, com diferentes configurac¸˜oes de obst´aculos. O robˆo deveria completar o trajeto at´e o ponto final especificado, esquivando-se de todos os obst´aculos existentes.
4.1 Testes em Ambientes Controlados
• Experimento 1: Conforme ilustrado na Figura 13, este experimento considera trˆes obst´aculos distribu´ıdos de forma que seja indiferente a escolha, pelo robˆo, da rota a se-guir (pelo lado esquerdo ou direito). O objetivo encontra-se a 50 metros de distˆancia. O robˆo, quando controlado pelo SAN, logrou chegar ao objetivo, mas sem percorrer a rota mais eficiente.
Figura 13: Experimento 1.
• Experimento 2 (Figura 14): A distribuic¸˜ao de obst´aculos foi idealizada de maneira a forc¸ar um trajeto pelo lado esquerdo. Novamente, pode se verificar a diferenc¸a de eficiˆencia entre os sistemas, embora o SAN tenha atingido o objetivo.
• Experimento 3 (Figura 15): Este ´e um espelho do experimento 2; a configurac¸˜ao dos obst´aculos induz a uma trajet´oria ´otima pelo lado direito. Os resultados foram similares aos obtidos no experimento 2: o SPN foi mais eficiente que o SAN, mas este conseguiu novamente atingir o objetivo.
Figura 15: Experimento 3.
• Experimento 4 (Figura 16): Similar ao experimento 1, n˜ao indicando um lado preferencial para desvio dos obst´aculos. A sofisticac¸˜ao dos equipamentos permitiu ao SPN uma maior eficiˆencia; os equipamentos do SAN, por exemplo, n˜ao permitem detectar obst´aculos a uma distˆancia maior do que cinco metros. Assim, o robˆo controlado pelo SAN s´o consegue se esquivar e construir uma rota alternativa at´e o objetivo ap´os detectar a presenc¸a dos obst´aculos.
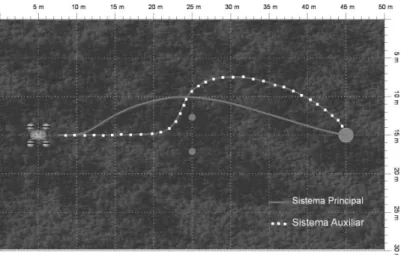
• Experimento 5 (Figura 17): O objetivo era forc¸ar o robˆo a girar para a direita e se deslocar rumo ao objetivo. Observa-se que o SPN consegue construir uma melhor rota, ao passo que o SAN (linha pontilhada), devido `a limitac¸˜ao de 5 metros para a distˆancia de aquisic¸˜ao de dados, n˜ao consegue detectar os outros obst´aculos e segue pela esquerda. Conforme os detecta, procura se esquivar e prosseguir rumo ao objetivo.
Figura 17: Experimento 5.
• Experimento 6 (Figura 18): Nesta distribuic¸˜ao aleat´oria de obst´aculos, o comportamento do SAN foi bastante similar ao do SPN, apenas um pouco menos suave nas proximidades do obst´aculo.
• Experimento 7 (Figura 19): Quatro obst´aculos foram dispostos de modo a formar um cor-redor estreito que permitiria ao robˆo atingir o objetivo sem necessidade de se esquivar de obst´aculo algum. Conforme apresentado na Figura 19, o SPN produz uma trajet´oria prati-camente retil´ınea, enquanto que, quando controlado pelo SAN, o robˆo tende a se esquivar dos obst´aculos detectados nas zonas laterais, perdendo um pouco de eficiˆencia no trajeto realizado.
Figura 19: Experimento 7.
• Experimento 8 (Figura 20): Esta situac¸˜ao, mostrada na Figura 20, foi a ´unica em que o robˆo controlado pelo SAN n˜ao conseguiu atingir o objetivo. A distribuic¸˜ao dos obst´aculos faz com que o robˆo os detecte j´a muito pr´oximo do objetivo, fazendo com que sempre se desvie de um deles e acabe por n˜ao atingir o objetivo.
• Experimento 9 (Figura 21): Os quatro obst´aculos formam um retˆangulo e a distˆancia entre os dois primeiros ´e insuficiente para o robˆo passar entre eles. Os resultados obtidos foram bons tanto para o SAN como para o SPN, uma vez que em nenhum dos casos o RAHM colidiu com os obst´aculos. A diferenc¸a est´a na eficiˆencia das trajet´orias.
Figura 21: Experimento 9.
• Experimento 10 (Figura 22):
Objetivo similar ao do experimento 6, com obst´aculos distribu´ıdos aleatoriamente. Os resultados foram similares aos do experimento 6, inclusive no que tange `a eficiˆencia.
´
E importante ressaltar a diferenc¸a existente entre os dois sistemas no tocante aos sensores: o sensor laser, equipamento essencial no SPN, consegue mapear todo o ambiente dentro de um raio de 80 metros `a frente, permitindo ao robˆo construir a rota mais eficiente, j´a que o ambiente ´e de apenas 50 metros; o SAN, por outro lado, necessita construir a rota em func¸˜ao das informac¸˜oes obtidas de uma vis˜ao m´axima de 5 metros. Mesmo com esta desvantagem, o SAN apresentou bons resultados, com um custo financeiro e computacional bastante menor e com um consumo energ´etico baixo.
4.2 Comparac¸˜ao dos Sistemas de Navegac¸˜ao
Fazendo uso das m´etricas mencionadas anteriormente (consumo de energia, custo financeiro, custo computacional e simplicidade), a Tabela 1 apresenta os resultados comparativos para cada sistema de navegac¸˜ao.
No caso do SAN, ´e monitorada apenas a mem´oria do PC remoto, identificado na tabela com a sigla CR; no caso do SPN, monitoram-se tanto a mem´oria do PC embarcado (CE) como a do PC remoto (CR). Percebe-se que o SAN n˜ao satura a placa de rede, pois faz uso de apenas 15% do seu poder. Al´em disso, a mem´oria do PC remoto ´e utilizada em 50%, j´a levando em conta o custo computacional da execuc¸˜ao do controlador fuzzy programado em Visual Studio. O consumo de corrente do sistema ´e de 6,5 Amperes em m´edia. No caso do SPN, observa-se um maior consumo de corrente, tempos mais curtos para realizar os diferentes experimentos e custo computacional mais alto.
Destacam-se, na Tabela 1, os itens com melhor resultado para os sistemas utilizados. Percebe-se que o SAN ´e um sistema menos eficiente em relac¸˜ao ao tempo de percurso, mas necessita de apenas um pouco mais da metade da energia requerida pelo SPN.
Os dez experimentos, al´em de servirem para se avaliar o sistema auxiliar de navegac¸˜ao, foram importantes para testar o RAHM de forma geral, depurar todos os sistemas e identificar eventuais problemas espec´ıficos. Foi encontrado, por exemplo, um problema mecˆanico – roda dianteira direita mecanicamente freada – que ocasionava um maior consumo de corrente quando o robˆo girava para a direita.
5 CONCLUS ˜OES
Este trabalho apresentou o desenvolvimento de um controle para o Sistema Auxiliar de Navegac¸˜ao (SAN) de um robˆo ambiental h´ıbrido denominado RAHM. O sistema resultante deve-ria atender a imposic¸˜oes do projeto: baixo consumo de energia, baixo custo financeiro e computa-cional, simplicidade e desempenho satisfat´orio quando comparado ao do Sistema de Navegac¸˜ao Prim´ario, que conta com equipamentos mais caros e sofisticados.
Tabela 1: Comparac¸˜ao entre o SAN e o SPN.
Tempo (Seg) Consumo de corrente (mA) Corrente X tempo (mA/h) Custo Computacional (%) Dados na Rede (%)
SAN SPN SAN SPN SAN SPN SAN SPN SAN SPN
1:43 1:32 6468 10415 185,05 266,16 51% CR 76%CE,
65%CR 12,8% 76%
2:04 1:30 6820 10115 234,91 252,87 48% CR 81%CE,
67%CR 12,5% 82%
2:07 1:28 7430 10815 262,11 225,31 49% CR 80%CE,
67%CR 13% 82%
1:27 1:15 7115 10085 171,94 210,1 52% CR 78%CE,
65%CR 11,6% 86%
2:10 1:10 6680 10225 241,22 198,81 51% CR 90%CE,
64%CR 14,3% 78%
1:03 55 6955 10180 121,71 155,52 51% CR 83%CE,
63%CR 12,8% 80%
1:08 1:00 6200 9980 117,11 166,33 46% CR 77%CE,
66%CR 11,9% 85%
—— 52 —— 10345 —— 149,42 —— 86%CE,
73%CR —— 82%
1:35 1:12 7050 10280 186,04 205,6 50% CR 82%CE,
64%CR 12,7% 78%
1:48 1:10 6650 9720 199,5 189 47% CR 84%CE,
64%CR 12,5% 75%
experimentos, o SAN conseguiu atingir o objetivo, mostrando-se confi´avel frente `as limitac¸˜oes de equipamento e `as caracter´ısticas desejadas.
Por n˜ao ser dotado de sensor a laser – presente apenas no SPN –, que permite o mapeamento de todo o ambiente, o SAN mostrou-se, em geral, menos eficiente do que SPN em termos de trajet´orias da origem ao objetivo especificado. Por outro lado, o SAN apresenta custos bas-tante inferiores ao do SPN, configurando-se em uma excelente alternativa para situac¸˜oes de emergˆencia.
ABSTRACT. This paper presents the development of a fuzzy logic-based auxiliary navi-gation system for a Medium-Sized Hybrid Environmental Robot. The electronic project and the navigation system programming are also presented. The system’s behaviour is evaluated against the robot’s main navigation system.
Keywords: Fuzzy logic; Autonomous robotics; Navigation; Control.
REFER ˆENCIAS
[1] “Visual Studio. Development Application”.https://www.visualstudio.com/support. [2] A. Barral Silva. “Modelagem de Sistemas Rob´oticos M´oveis para Controle de Trac¸˜ao em Terrenos
Acidentados”. Master’s thesis, PUC-Rio (2007).
[3] G. Cook. “Mobile Robots: Navigaton, Control and Remote Sensing”. Wiley-IEEE Press (2011).
[4] J.P. Cordoba, C.A. Restrepo & L.H. R´ıos. Descripti´on de una Plataforma M´ovil Implementada Para El Estudio de T´ecnicas Inteligentes de navegaci´on: P-metin.Scientia et Technica,XI(27) (2005), 37–42.
[5] C. G´omez. “CONTROLE FUZZY DE UM SISTEMA AUXILIAR de Navegac¸˜ao de um Robˆo Ambiental H´ıbrido”. Master’s thesis, PUC-Rio (2016).
[6] F. Gomide, R.R. Gudwin & R. Tanscheit. Conceitos fundamentais da teoria de conjuntos fuzzy, l´ogica fuzzy e aplicac¸˜oes. In “6th IFSA Congress: Tutorials” (1995), pp. 1–38.
[7] C.K. Lee, C.L. Lin & B.M. Shiu. Autonomous vehicle parking using artificial intelligent approach. In “4th International Conference on Autonomous Robots and Agents” (2000), pp. 496–451.
[8] J.M. Mendel. Fuzzy logic systems for engineering: a tutorial.Proceedings of the IEEE,83(3) (1995), 345–377.
[9] C. Rodrigo & A. Cipriano. Sistema de Guiado para un robot m´ovil basado en l´ogica difusa. In “XV Congreso de la Asociaci´on Chilena de Control Autom´atico” (2002), pp. 387–392.
[10] A. Saffiotti. The Uses of Fuzzy Logic in Autonomous Robot Navigation.Soft Computing,1(4) (1997), 180–197.
[11] A. Saffiotti. Fuzzy logic in autonomous navigation. In D. Driankov & A. Saffiotti (editors), “Fuzzy Logic Techniques for Autonomous Vehicle Navigation”. Springer-Physica Verlag (2001), pp. 3–24.
[12] P. Stein & N. Reis. Sistema integrado de navegac¸˜ao para o Robˆo Ambiental Hibrido na Floresta Amazˆonica. In “XIII Simp´osio Brasileiro de Sensoriamento Remoto” (2007), pp. 21–26.
[13] K. Tanaka. “An introduction to fuzzy logic for practical applications”. Springer (1996).
[14] C. von Altrock. “Fuzzy logic and Neuro Fuzzy applications in business and finance”. Prentice Hall (1996).
[15] B.F. Wu, T.T. Lee, H.H. Chang, J. J-J, C.N. Lien, T.Y. Liao & J.W. Perng. GPS navigation based autonomous driving system design for intelligent vehicles. In “IEEE International Conference on Systems, Man and Cybernetics” (2007), pp. 3294–3299.