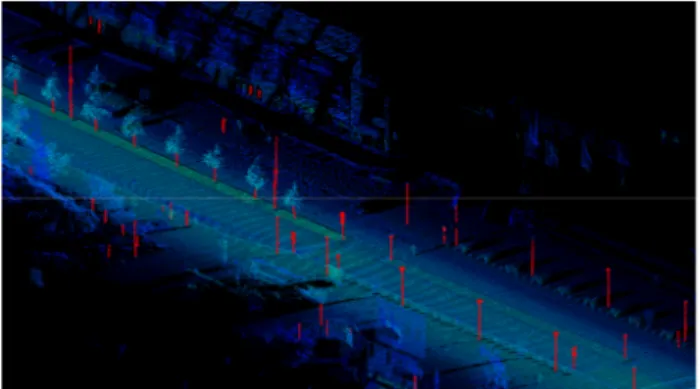
PERFORMANCE ANALYSIS OF A POLE AND TREE TRUNK DETECTION METHOD FOR MOBILE LASER SCANNING DATA
Texto
Imagem


Documentos relacionados
Os resultados da pesquisa, conforme descrito nos objetivos, resumem-se em três principais. Primeiramente, a apresentação do panorama geral das escolas pesquisadas, no que
Object generation was implemented by using horizontal and vertical edges on the way region of interest segmented by utilizing color information.. The sub-images
Results: A fast method for the detection and inference of point data set space-time disease clusters is presented, the Voronoi Based Scan (VBScan).. A Voronoi diagram is built
The proposed method is based on a branch and bound (BB) scheme, and the NLP problems that appear in the BB tree search are solved to optimality by a derivative-free global method
The aim of this work is to study and develop a surface scanning technique, based on Continuous Scanning Magnetic Barkhausen Noise (CSMBN), for the detection of non-
For description of the feature points, we use binary descriptor called Learned Arrangements of Three Patch Codes (LATCH), which is robust to noise in both the MLSPC and aerial
If the poles of the cell are connected by a load (incandescent lamp), electrons flow from the negative pole to the positive pole. Due to the scarcity of electrons
KEY WORDS: Mobile Laser Scanning, Point Cloud, Pavement Crack, Automated Detection, Urban
