José António Ferreira Monteiro
Sensores de Fibra Ótica Baseados em
Novos Materiais Flexíveis
José António Ferreira Monteiro
Julho de 2013
UMinho | 2013
Sensor
es de F
ibra Ótica Baseados em
No vos Mater iais Fle xív eis
Universidade do Minho
Escola de Engenharia
Julho de 2013
Tese de Mestrado
Ciclo de Estudos Integrados Conducentes ao Grau de Mestre
em Engenharia Eletrónica Industrial e de Computadores
Trabalho efetuado sob a orientação do
Professor Doutor João Paulo Carmo
José António Ferreira Monteiro
Sensores de Fibra Ótica Baseados em
Novos Materiais Flexíveis
Universidade do Minho
Escola de Engenharia
“O importante na ciência não é tanto obter fatos novos, mas descobrir novas maneiras de pensar sobre eles.”
v
Agradecimentos
Eu gostaria de aproveitar esta oportunidade para expressar os meus sinceros agradecimentos a todas as pessoas que contribuíram e apoiaram na realização desta dissertação.
Em primeiro lugar, quero agradecer ao meu orientador, o Professor Doutor João Paulo Carmo, que me propôs este trabalho. Da sua parte recebi sugestões, motivação e inteira disponibilidade, tornando a realização desta dissertação mais acessível e aliciante.
Gostaria de agradecer aos colegas do Laboratório de Micro/Nanotecnologias e Aplicações Biomédicas, destacando de um modo particular o investigador José Miguel Gomes pelos conselhos e ideias ao longo do trabalho experimental.
Agradeço ainda a todos os técnicos do Departamento de Eletrónica Industrial pela sua ajuda e disponibilidade.
Uma palavra de gratidão aos meus amigos Daniel Dias, Vítor Fernandes, Jaime Ferreira e Bruno Duarte pela amizade e companheirismo ao longo de todo o curso.
Por último, mas não menos importante, quero agradecer aos meus pais, irmã e namorada pelo apoio incondicional durante todo o meu percurso académico.
vii
Resumo
Esta dissertação apresenta um sensor ótico baseado em fibra ótica com redes de
Bragg (FBG) para medir deformações, curvaturas e vibrações. Este sensor foi embebido
num material flexível para proteger e assegurar uma boa ligação com a estrutura a monitorizar. O material selecionado foi o Polidimetilsiloxano (PDMS). O FBG utilizado foi criado pelo método da máscara de fase para refletir o comprimento de onda de 1552.43 nm, tendo sido embebido no PDMS antes do processo de solidificação para assegurar uma forte aderência entre os dois componentes.
O protótipo fabricado foi caracterizado do ponto de vista estático e dinâmico. No primeiro caso, foi utilizado um setup de teste construído especificamente para esse propósito. Foram realizadas cinco medições com um deslocamento máximo de 8 mm e obtidas as curvas da variação do comprimento de onda refletido em função da elongação do sensor. Posteriormente, o FBG embebido em PDMS foi exposto a elevadas temperaturas (150 a 200 °C) e repetidos os testes para averiguar o comportamento do sensor e do material.
A caracterização dinâmica dividiu-se em dois testes distintos. No primeiro foi aplicada uma frequência fixa ao sistema oscilatório, enquanto no segundo foi aplicada uma variação linear da frequência. No primeiro teste, o protótipo foi colocado a elevadas temperaturas e repetidos os diferentes testes. Isto permitiu avaliar a resposta dinâmica do sensor após a degradação térmica.
Em todos os testes, foi possível observar que o sensor caracteriza razoavelmente os deslocamentos dos provetes de teste.
ix
Abstract
This dissertation presents an optical sensor based on optical Fiber Bragg Grating (FBG) to measure displacements, strains and vibrations. This sensor has been embedded into a flexible material so as to provide protection and to ensure a good bond with the structure to be monitored. The material selected was the Polydimethylsiloxane (PDMS). The FBG was created by the phase mask method to reflect the wavelength of 1552.43 nm and it was embedded in PDMS before solidification process to ensure a strong adhesion between the two components.
The prototype produced was characterized both in terms of static and dynamic behavior. In the first case, it was used a test setup specifically built for this purpose. Sets of five measurements were performed up to a maximum displacement of 8 mm and at the same time, it was obtained the curves of the reflected wavelength according to the elongation of the sensor. Subsequently, the FBG embedded on PDMS was exposed to high temperatures (150 to 200 oC). In these cases, the tests were repeated to investigate the behavior of the sensor and the material with relation to the temperature.
The dynamic characterization was divided into two distinct tests. At first, it was applied a fixed frequency to the shaking system, while on the second a linear variation of the frequency was applied. In the first test, the prototype was placed at high temperatures and at the same time, the different tests were repeated. This allowed the evaluation of the dynamic response of the sensor after the thermal degradation.
On all tests, it was possible to observe the ability to characterize with a reasonable degree, the displacements suffered by the test structures (specimen).
xi
Índice
Agradecimentos ... v
Abstract ... ix
Lista de Figuras ... xiii
Lista de Tabelas ... xv
Lista de Acrónimos ... xvii
Nomenclatura ... xix
Capítulo 1 - Introdução ... 1
1.1 Enquadramento ... 1
1.2 Motivação ... 2
1.3 Objetivos ... 2
1.4 Organização e Estrutura da Dissertação ... 3
Capítulo 2 - Componentes Óticos ... 5
2.1 Fibra Ótica ... 5
2.1.1 Aspetos Construtivos ... 6
2.1.2 Mecanismos de Propagação ... 7
2.1.3 Tipos de Fibras Óticas ... 8
2.1.4 Gamas Espectrais ... 10 2.1.5 Atenuação ... 11 2.2 Emissores Óticos ... 12 2.2.1 Física ... 13 2.2.2 LEDs ... 14 2.2.3 Díodos LASER ... 14 2.3 Detetores Óticos ... 15 2.3.1 Fotodíodos PIN ... 16 2.3.2 Fotodíodos ... 17
2.3.3 Fotodíodos de efeito avalanche (APD) ... 17
2.4 Juntas e Conetores Óticos ... 18
2.4.1 Acoplamento Fibra-Fibra ... 19
2.4.2 Mecanismos de perdas em juntas ... 22
2.4.3 Acoplamento Emissor-Fibra e Fibra-Detetor ... 23
2.5 FBGs ... 24
2.5.1 Princípio de Funcionamento ... 24
2.5.2 Processo de Fabrico ... 26
xii Capítulo 3 - Integração do FBG em PDMS ... 29 3.1 Seleção do Material ... 29 3.1.1 Polidimetilsiloxano (PDMS) ... 30 3.2 Conceção do FBG em PDMS ... 31 3.2.1 Desenho do Setup ... 31 3.2.2 Fabrico do Setup ... 32 3.2.3 Processo de inserção do FBG em PDMS ... 33 3.3 Protótipos ... 34
Capítulo 4 - Caracterização do Sensor ... 35
4.1 Provete de teste ... 35
4.2 Software e Hardware de Leitura (Comprimento de Onda) ... 36
4.3 Caracterização Estática ... 37
4.3.1 Setup de teste ... 38
4.3.2 Sensores FLX-01 ... 40
4.3.3 Software e Hardware de Leitura (Tensão) ... 43
4.3.4 Teste à temperatura ambiente ... 44
4.3.5 Testes às Restantes Temperaturas ... 46
4.4 Caracterização Dinâmica ... 48
4.4.1 Setup de Teste ... 49
4.4.2 Teste Dinâmico (Frequência Fixa) ... 50
4.4.2 Teste Dinâmico (Variação Linear da Frequência) ... 58
4.5 Degradação Visual com a Temperatura ... 60
Capítulo 5 - Conclusões e Trabalho Futuro ... 63
xiii
Lista de Figuras
Figura 2.1: Esquema de transmissão genérico de sinais em fibra ótica. ... 5
Figura 2.2: Estrutura da Fibra Ótica... 6
Figura 2.3: Corte transversal da fibra ótica com duas camadas de revestimento. ... 6
Figura 2.4: Refração e reflexão de um feixe de luz na fronteira entre dois meios diferentes. ... 7
Figura 2.5: Corte longitudinal da fibra com transmissão de luz no interior do núcleo. ... 8
Figura 2.6: Corte longitudinal e transversal de uma fibra monomodo de índice em degrau. ... 9
Figura 2.7: Corte longitudinal e transversal de uma fibra multimodo de índice em degrau. ... 9
Figura 2.8: Corte longitudinal e transversal de uma fibra multimodo de índice gradual. ... 10
Figura 2.9: Transferência de energia numa junção pn. ... 13
Figura 2.10: Estrutura básica de um fotodíodo PIN. ... 16
Figura 2.11: Estrutura básica de um fotodíodo. ... 17
Figura 2.12: Extremidades das fibras óticas: a) Face defeituosa (lábios); b) Face defeituosa (joelho); c) Face de boa qualidade (plana)... 19
Figura 2.13: Kit para junção de fibras óticas: a) Alicate descarnador; b) Álcool Etílico; c) Máquina de corte (Furukawa Electric S325A); d) Máquina de fusão (Furukawa Electric S123C)... 20
Figura 2.14: Etapas do processo de fusão de duas fibras: 1) Posição inicial; 2) Pré-aquecimento das extremidades; 3) Fibras pressionadas entre si; 4) Junta executada com sucesso. ... 21
Figura 2.15: Empalme de proteção para juntas de fibra ótica. ... 21
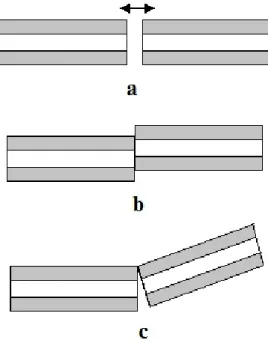
Figura 2.16: Desalinhamento mecânico nas juntas: a)Longitudinal; b)Lateral ou axial; c)Angular. .. 22
Figura 2.17: Conetores Óticos: a) Tipo FC/PC; b) Tipo ST; c) Tipo LC; d)Tipo SMA; e) Tipo SC ... 23
Figura 2.18: Ilustração do princípio de funcionamento dos FBGs. ... 25
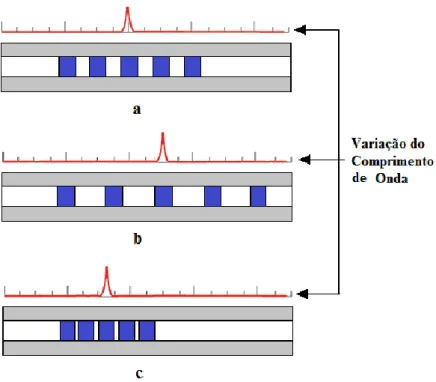
Figura 2.19: Comprimento de onda refletido da fibra: a) Posição normal; b) Alongada; c) Comprimida. ... 26
Figura 2.20: Ilustração do processo de gravação da rede de Bragg por máscara de fase. ... 26
Figura 3.1: Composição química do Polidimetilsiloxano (PDMS). ... 30
Figura 3.2: PDMS em estado: a) Líquido [29]; b) Sólido [27]. ... 30
Figura 3.3: Modelo CAD da estrutura para conceção dos sensores FBG em PDMS [30]. ... 32
Figura 3.4: Ilustração da estrutura finalizada com fibra ótica embebida em PDMS [30]. ... 33
Figura 3.5: Protótipo do sensor FBG embebido em PDMS. ... 34
Figura 3.6: Ilustração da flexibilidade dos protótipos constituídos com PDMS. ... 34
Figura 4.1: Fotografia com pormenor do provete de teste. ... 35
Figura 4.2: Diagrama de blocos do sistema de leitura ótica... 36
Figura 4.3: Fotografia das caixas com o sistema de leitura ótica. ... 36
Figura 4.4: Programa em LabVIEW para leitura do comprimento de onda. ... 37
Figura 4.5: Setup de teste para caracterização estática: a) Vista frontal; b) Vista superior. ... 38
xiv
Figura 4.7: Sensor FLX-01 Sparkfun SEN-08606. ... 40
Figura 4.8: Gráficos da variação da resistência em R1 e R2. ... 41
Figura 4.9: Divisor de tensão dos sensores FLX-01. ... 41
Figura 4.10: Ilustração da curvatura do sensor FBG embebido em PDMS. ... 42
Figura 4.11: Painel do programa LabVIEW para leitura da tensão. ... 44
Figura 4.12: Gráfico das cinco medições mostrando a variação do comprimento de onda em relação ao deslocamento na direção axial do FBG. ... 45
Figura 4.13: Gráfico da média das medições e das equações de regressão... 46
Figura 4.14: Gráfico da média das medições após exposto o protótipo a diferentes temperaturas. .... 47
Figura 4.15: Gráfico das retas de regressão das diferentes temperaturas. ... 48
Figura 4.16: Componentes do setup de teste dinâmico: a) Excitador de vibração programável; b) Amplificador de potência; c) Shaker vibracional. ... 49
Figura 4.17: Setup de teste dinâmico: a) Vista lateral; b) Vista Superior. ... 50
Figura 4.18: Gráfico da variação do comprimento de onda para uma oscilação do shaker a uma frequência de 5 Hz e amplitudes de 1, 3 e 6 mm ... 51
Figura 4.19: Representação da FFT para uma frequência de 5 Hz e amplitudes de 1, 3 e 6 mm. ... 52
Figura 4.20: Gráfico da variação do comprimento de onda para uma oscilação do shaker a uma frequência de 10 Hz e amplitudes de 1, 3 e 6 mm. ... 53
Figura 4.21: Representação da FFT para uma frequência de 10 Hz e amplitudes de 1, 3 e 6 mm.. ... 53
Figura 4.22: Gráfico da variação do comprimento de onda para uma oscilação do shaker a uma frequência de 25 Hz e amplitudes de 1, 3 e 6 mm. ... 54
Figura 4.23: Representação da FFT para uma frequência de 25 Hz e amplitudes de 1, 3 e 6 mm. .... 54
Figura 4.24: FFT para uma frequência de 10 Hz e amplitude de 3 mm após exposto o protótipo à temperatura de: a) 150 °C; b) 160 °C; c) 170 °C; d) 180 °C; e) 190 °C; f) 200 °C. ... 57
Figura 4.25: Representação da variação do comprimento de onda em função do tempo de três partes do sinal adquirido. ... 59
Figura 4.26: Representação das FFTs de três partes do sinal adquirido. ... 59
Figura 4.27: Protótipo do FBG inserido em PDMS: a) Antes do primeiro aquecimento; b) Após aquecimento a 200 °C. ... 60
Figura 4.28: Fibra ótica e protótipo do FBG inserido em PDMS após exposição à maior temperatura (200 °C). ... 61
Figura 5.1: Ilustração de uma roseta de extensómetros. ... 65
xv
Lista de Tabelas
Tabela 2.1: Janelas de Transmissão das fibras óticas em vidro. ... 11
Tabela 2.2: Valores de atenuação para as janelas de transmissão. ... 12
Tabela 2.3: Materiais semicondutores mais utilizados no fabrico de LEDs e díodos LASER... 15
Tabela 2.4: Materiais Semicondutores mais utilizados no fabrico de detetores óticos. ... 18
Tabela 2.5: Exemplos de aplicações dos FBG. ... 28
Tabela 4.1: Resistências reais dos sensores FLX-01 Sparkfun SEN-08606. ... 40
Tabela 4.2: Relação do pico dominante e picos secundários para as amplitudes de 1, 3 e 6 mm à frequência de 5 Hz. ... 52
Tabela 4.3: Relação do pico dominante e pico secundário para as amplitudes de 1, 3 e 6 mm à frequência de 10 Hz. ... 54
Tabela 4.4: Relação do pico dominante e pico secundário para as amplitudes de 1, 3 e 6 mm à frequência de 25 Hz. ... 55
xvii
Lista de Acrónimos
FBG Fiber Bragg Grating
PDMS Polidimetilsiloxano (Polydimethylsiloxane) LED Díodo emissor de luz (Light Emitting Diode)
LASER Light Amplification by Stimulated Emission of Radiation
PIN P-Intrinsic-I
FET Transístor de efeito de campo (Field-Effect Transistor) APD Díodo de efeito de avalanche (Avalanche PhotoDiode) UV Ultravioleta
PVC Policloreto de vinilo (Polyvinyl chloride) PMMA Polymethyl Methacrylate
PVAc Polyvinyl acetate
CAD Projeto assistido por computador (Computer-Aidded Design) CNC Computer Numerical Control
LabVIEW Laboratory Virtual Instrument Engineering Workbench
xix
Nomenclatura
Símbolo
Descrição
Unidade
ϴ Ângulo º
ni Índice de refração de um meio -
α Atenuação por unidade de comprimento dB.km-1
Pi Potência ótica de entrada m-1
Po Potência ótica de saída m-1
L Comprimento da fibra ótica m
Eg Energia de gap eV
h Constante de Plank eV.s
f Frequência Hz
c Velocidade da luz no vazio m.s-1
𝜆� Comprimento de onda m
𝜆�B Comprimento de onda de Bragg m
neff Índice de refração efetivo -
𝛬� Período dos gratings m
𝛬�m Período das ranhuras da máscara de fase m
R Resistência elétrica Ω
V Tensão V
ε
Δ Elongação %1
CAPÍTULO 1
Introdução
Neste capítulo é apresentado o enquadramento desta dissertação e a sua motivação. Os objetivos são expostos, sendo simultaneamente esclarecida a organização e respetiva estrutura.
1.1 Enquadramento
Esta dissertação pretende expor uma solução alternativa para a utilização e caracterização de sensores de fibra ótica, nomeadamente os sensores de fibra ótica com redes de Bragg (FBG). Nas últimas três décadas, a utilização destes sensores tem sofrido um aumento significativo, podendo ser encontrados nos vários setores da indústria. A preferência recai nos FBGs devido às suas propriedades intrínsecas, destacando-se como principais vantagens a transmissão com baixas perdas, elevada imunidade contra interferências eletromagnéticas, dimensões reduzidas e isolamento elétrico [1]. Estes sensores permitem a monitorização de diferentes parâmetros, tais como a pressão, temperatura, deformação e vibrações, sendo os dois últimos abordados nesta dissertação [2].
A parte sensora está presente no interior do núcleo da fibra ótica, sendo criada através de luz ultravioleta. O seu funcionamento equipara-se a um filtro ótico, permitindo a transmissão de luz ao longo da fibra, exceto num determinado comprimento de onda, que é refletido para trás. O comprimento de onda refletido permite fazer a caracterização dos sensores no âmbito das suas necessidades para a aplicação em instrumentação, nomeadamente da sua sensibilidade à deformação ocorrida na fibra ótica [3].
O trabalho realizado centra-se na caracterização e teste dos sensores, tendo como finalidade apresentar a resposta destes quando expostos a diferentes situações. Estes testes permitem uma análise minuciosa do novo material em que vai ser embebida a fibra ótica.
2
1.2 Motivação
Ao longo dos últimos anos, tem-se assistido a um aumento significativo na utilização de fibras óticas na área das telecomunicações. Com a maior utilização e conhecimento, outras funcionalidades e tecnologias associadas às fibras foram sendo desenvolvidas, destacando-se os sensores baseados em comunicações óticas. Estes têm vindo ser utilizados numa grande diversidade de aplicações, tendo despertado um maior interesse na área da Robótica, Biomédica, Têxtil, assim como medições de temperatura e vibrações [4]. O problema inerente a este tipo de sensores não se prende pelos sensores em si, mas sim como estão embebidos na fibra ótica. A fibra apresenta assim dois problemas que necessitam ser resolvidos para que os sensores possam ser utilizados de forma correta [5]. Em primeiro lugar, a fibra devido às suas características, é particularmente frágil, podendo facilmente danificar-se ou quebrar quando exposta a condições adversas. O segundo problema, não menos importante, deve-se ao facto de a fibra necessitar de um material que assegure uma boa ligação com a estrutura que se pretende monitorizar, considerando que este não provoque interferências na informação enviada das estruturas para os sensores e simultaneamente não degrade a sua sensibilidade.
De modo a resolver estes dois problemas, a solução encontrada passa pela utilização de um material capaz de providenciar simultaneamente proteção e uma boa ligação entre a fibra e a estrutura em estudo. O PDMS (Polidimetilsiloxano) é o material com estas características que se apresenta nesta dissertação. A escolha recaiu no PDMS devido às suas características singulares, destacando-se a alta flexibilidade, tolerância a altas temperaturas e as suas propriedades inertes [6]. Outro fator de valorização deste material prende-se com o baixo custo, comparativamente com os restantes materiais utilizados neste tipo de situações. Este projeto de investigação apresenta assim como motivação alcançar os bons resultados proporcionados por soluções já existentes na indústria, de modo a oferecer um produto com as mesmas garantias, com a vantagem de se tornar uma opção economicamente mais acessível.
1.3 Objetivos
O objetivo predominante desta dissertação é a caracterização dos sensores de fibra ótica, nomeadamente os FBG. Estes sensores são utilizados pois já provaram ser uma melhor solução, comparando com os restantes tipos de sensores óticos em condições
3
específicas onde um tipo de deslocamento esteja presente. A caracterização dos sensores será feita do ponto de vista estático e dinâmico, sendo necessários dois setups de teste onde a fibra embebida em PDMS vai estar colocada, tornando assim possível a recolha de informação.
Posteriormente à sua caracterização, o PDMS será exposto a altas temperaturas de forma gradual, com o objetivo de analisar a influência da temperatura no material e na informação lida pelos sensores. Após toda a investigação laboratorial, o objetivo é ter-se adquirido toda a informação sobre os sensores, assim como do papel do PDMS neste processo, de forma a analisar se este material pode ser considerado uma solução viável.
1.4 Organização e Estrutura da Dissertação
O presente documento encontra-se organizado em cinco capítulos, denotando a seguinte estrutura:
No capítulo introdutório é apresentado o enquadramento e a motivação que levou à concretização deste projeto de investigação, sendo igualmente expostos os principais objetivos.
No segundo capítulo é descrita a teoria dos componentes óticos associados ao funcionamento dos FBGs. O capítulo inicia-se com a clarificação do conceito de fibra ótica, incluindo os seus aspetos constituintes, tipos de fibras existentes, mecanismos de propagação da luz e as suas gamas espectrais. Seguidamente são apresentados os diferentes tipos de emissores e detetores óticos, sendo também exposto o seu princípio de funcionamento. As juntas em fibras são igualmente abordadas, exibindo as técnicas utilizadas para os diferentes acoplamentos, assim como os mecanismos de perdas. O capítulo termina com os FBGs, abrangendo as suas características principais e aplicações na indústria.
No capítulo três é exibida a técnica de integração do sensor em PDMS. É explicada a razão da escolha ter recaído neste material, assim como todas as etapas da conceção do FBG inserido no PDMS. Na parte final são apresentados os protótipos desenvolvidos.
O quarto capítulo aborda as questões de natureza prática deste projeto. Inicialmente é descrito o setup e todo o processo de caracterização dos sensores do ponto de vista estático, apresentando todos os resultados obtidos. Em seguida, são exibidos os resultados da caracterização dinâmica dos sensores, estando esta dividida em dois testes distintos. O primeiro consiste em provocar uma vibração constante, sendo no segundo
4
teste aplicada uma variação linear da vibração nos sensores. Em ambas as situações, o PDMS foi exposto a temperaturas elevadas e repetidos os testes para analisar a reação do material.
Finalmente, no último e sexto capítulo são apresentadas as conclusões e um conjunto de sugestões de trabalho futuro.
5
CAPÍTULO 2
Componentes Óticos
O propósito deste capítulo é apresentar alguns fundamentos teóricos dos componentes óticos associados ao funcionamento dos FBGs. O capítulo inicia-se com a clarificação dos conceitos de fibra, seguindo-se os emissores e detetores óticos, incluindo os seus aspetos constituintes e princípio de funcionamento. As juntas em fibras são igualmente abordadas, exibindo as diferentes técnicas utilizadas, assim como os mecanismos de perda. O capítulo termina com a teoria presente nos FBGs, estando exposto o seu princípio de funcionamento, o seu método de fabrico e apresentadas algumas aplicações na indústria.
2.1 Fibra Ótica
A fibra ótica é um meio de transmissão que utiliza um sinal luminoso para transportar a informação. Antes da sua transmissão na fibra, os sinais elétricos são convertidos em sinais óticos através de um emissor, sofrendo no final da transmissão o processo inverso operado por um detetor. A figura 2.1 apresenta um esquema simplificado do sistema de comunicação utilizando fibras óticas.
Figura 2.1: Esquema de transmissão genérico de sinais em fibra ótica.
Este modo de transportar a informação revolucionou a área das telecomunicações, apresentando inúmeras vantagens comparadas com os métodos de transmissão convencionais. A constituição das fibras, assim como a teoria presente no seu funcionamento é apresentado em seguida.
6
2.1.1 Aspetos Construtivos
A fibra ótica, relativamente à sua constituição, é formada especialmente por materiais dielétricos (plástico ou vidro), ou seja, materiais com elevada resistência elétrica [7]. A fibra apresenta uma estrutura cilíndrica de secção circular, flexível e transparente, com dimensões bastante reduzidas, equiparando-se às de um fio de cabelo humano. A sua construção é composta por três camadas distintas, sendo estas ilustradas na figura 2.2.
Figura 2.2: Estrutura da Fibra Ótica.
A figura 2.2 permite observar fundamentalmente a existência de um núcleo central, constituído por um material dielétrico, envolvido por uma outra camada, também dielétrica, denominada bainha. A luz propaga-se ao longo da fibra no interior do núcleo, tendo a bainha como função impedir qualquer perda de energia para o exterior. A fibra pode apresentar uma ou mais camadas de revestimento, permitindo estas uma maior flexibilidade e elasticidade, assim como fornecer proteção contra impurezas externas. Na presença de duas camadas de revestimento poderá ainda existir um gel que protege a fibra de pressões vindas do exterior [7]. Esta configuração é exemplificada na figura 2.3.
7
2.1.2 Mecanismos de Propagação
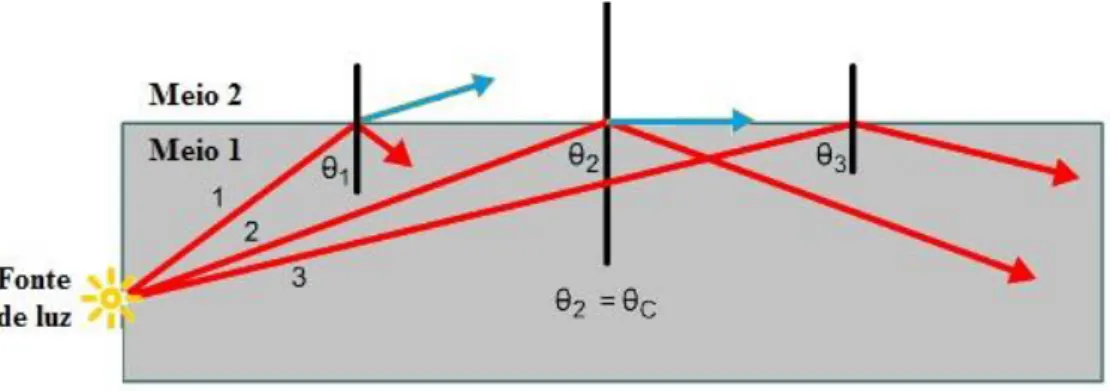
A capacidade de propagar luz de um ponto para o outro no interior do núcleo da fibra ótica deve-se a um fenómeno designado Reflexão Interna Total [8]. Este conceito pressupõe que quando um feixe de luz incide na fronteira entre dois meios diferentes, com um determinado ângulo, uma parte da luz é refratada e a outra parte é, novamente, refletida para o meio original, com um ângulo de reflexão igual ao ângulo de incidência. Quando um raio de luz se propaga de um meio com elevado índice de refração, Meio1, para um meio com baixo índice de refração, Meio 2, não ocorre refração da luz se o ângulo de incidência for superior a um determinado ângulo, denominado ângulo crítico, ϴc [8]. Na figura 2.4 podem-se verificar três feixes de luz, com diferentes ângulos de
incidência.
Figura 2.4:Refração e reflexão de um feixe de luz na fronteira entre dois meios diferentes.
Observando a figura 2.4, verifica-se que a luz ao incidir na fronteira entre os dois meios, com um ângulo inferior ou igual a ϴc, não será totalmente refletida, saindo uma
parte da energia do raio incidente para o Meio 2. Estes casos estão exemplificados pelo raio 1 e raio 2, com ângulos de incidência ϴ1 e ϴ2, respetivamente. No terceiro caso, o
ângulo de incidência é superior ao ângulo crítico, sendo a luz totalmente refletida de novo para o Meio 1.
Relativamente à fibra ótica, os dois materiais dielétricos que constituem o núcleo e a bainha têm de necessariamente apresentar índices de refração ligeiramente diferentes. Seguindo o fenómeno explicado em cima, o índice de refração do núcleo, designado por n1, necessita de ser superior ao índice de refração da bainha, n2. Deste modo, e com um
ângulo de incidência superior ao ângulo crítico, a luz propaga-se ao longo de todo o comprimento da fibra exclusivamente no interior do núcleo sendo continuamente refletida na fronteira com a bainha. A forma como a luz é conduzida ao longo da fibra é apresentada na figura 2.5.
8
Figura 2.5: Corte longitudinal da fibra com transmissão de luz no interior do núcleo. O mecanismo de propagação da luz apresentado contribui para que a fibra ótica seja um meio de transmissão de dados bastante rápido e fiável. Para que este modo de propagação funcione corretamente, os materiais presentes na estrutura do núcleo e da bainha necessitam de ser extremamente puros, ou seja, não devem conter elevado número de impurezas, pois tal origina perdas no sinal transmitido.
2.1.3 Tipos de Fibras Óticas
As fibras óticas podem ser classificadas em grupos distintos, estando presentes como fatores de diferenciação o número de raios de luz que conseguem transmitir e a variação do índice de refração no núcleo.
2.1.3.1 Fibras Monomodo e Multimodo
A capacidade de transferir informação ao longo da fibra deve-se a um conjunto de raios de luz injetados no interior do núcleo, podendo estes ter diferentes trajetórias até alcançar o seu destino. Estes feixes de luz com diferentes trajetórias são classificados como modos de propagação. Considerando este fator, a fibra pode ser classificada de duas formas distintas: monomodo e multimodo.
As fibras monomodo, devido à dimensão reduzida do seu núcleo central, apenas permitem conduzir um raio de luz no seu interior, tendo somente um modo de propagação. Neste tipo de fibras, o núcleo apresenta diâmetros reduzidos, estando compreendidos entre os 8 e os 10 µm, enquanto a bainha tem um diâmetro na ordem dos 125 µm [9]. Estas dimensões reduzidas do meio de transmissão fazem com que a onda de luz se propague praticamente em paralelo com o eixo da fibra. Na figura 2.6 está representada a sua estrutura.
9
Figura 2.6: Corte longitudinal e transversal de uma fibra monomodo de índice em degrau. Por sua vez, as fibras multimodo ostentam dimensões do seu núcleo bastante superiores, tendo assim a capacidade de transmitir vários modos de propagação. Os vários feixes de luz com o mesmo comprimento de onda são conduzidos ao longo da fibra com diferentes trajetórias, podendo apresentar velocidades de transmissão diferentes. O núcleo apresenta usualmente diâmetros de 50 ou 62,5 µm, sendo que a sua camada envolvente mantém o diâmetro das fibras monomodo, ou seja, com dimensões de 125 µm [9]. Uma ilustração das fibras multimodo é exibida na figura 2.7.
Figura 2.7: Corte longitudinal e transversal de uma fibra multimodo de índice em degrau. Comparando estes dois tipos de fibras óticas, destacam-se algumas vantagens e desvantagens relacionadas com o seu funcionamento. As fibras monomodo apresentam como um dos pontos a favor a capacidade de transmitirem praticamente na íntegra o sinal, obtendo à saída um feixe de luz com elevada qualidade. Outra das vantagens prende-se com o facto de conseguirem conduzir a luz a grandes distâncias sem a utilização de repetidores. Como desvantagens é de salientar as reduzidas dimensões do núcleo, tornando o modo de injeção da luz significativamente mais caro e complexo.
Em contrapartida, as fibras multimodo possuem um núcleo com dimensões superiores, permitindo a utilização de materiais mais baratos e simples em todo o processo de transmissão. As suas principais desvantagens prendem-se com a menor qualidade do sinal e as menores distâncias alcançadas relativamente às fibras com um único modo de propagação [10].
2.1.3.2 Fibras de Índice em Degrau e Índice Gradual
A variação do índice de refração no interior do núcleo, ao longo do processo de transmissão da luz, pode ocorrer de duas formas distintas. Deste modo, a fibra ótica é classificada em dois diferentes tipos: fibra de índice em degrau e fibra de índice gradual.
10
Nas fibras de índice em degrau, o núcleo apresenta um índice de refração uniforme sofrendo uma transição abrupta quando a luz incide na fronteira com a camada envolvente [11]. Este género de fibras pode funcionar em regime monomodo e multimodo, estando estas representadas pelas figuras 2.6 e 2.7, respetivamente.
As fibras de índice gradual, contrariamente às fibras em degrau, não possuem núcleo com índice de refração constante, decrescendo este desde o seu centro até à zona de fronteira com a bainha [11]. As fibras deste tipo transmitem a luz apenas em regime multimodo, estando na figura 2.8 demonstrada a forma como as ondas se propagam.
Figura 2.8: Corte longitudinal e transversal de uma fibra multimodo de índice gradual. Estes dois tipos de fibras podem ser comparados quando funcionam em regime multimodo. As fibras de índice gradual são muito mais utilizadas apesar do seu fabrico ser mais complexo, pois é necessário utilizar substâncias dopantes no interior do núcleo de modo a que o índice de refração tenha o comportamento explicado anteriormente. Os fatores que levam à opção recair nestas fibras em detrimento das outras são a melhor qualidade do sinal à saída em termos de interferência intersimbólica, assim como uma maior capacidade de transmissão da fibra ótica [12].
2.1.4 Gamas Espectrais
As frequências de trabalho das fibras óticas são extremamente elevadas, estando situadas na ordem dos Tera-Hertz, dificultando assim a análise do seu funcionamento. De modo a simplificar, utiliza-se o conceito de comprimento de onda para representar as diferentes gamas de operação das fibras. Os comprimentos de onda utilizados na transmissão ótica, relativamente ao espectro, estão um pouco acima do visível, e assim sendo não são detetáveis ao olho humano [13].
As fibras com constituição em óxido de silício (vidro) apresentam três regiões de baixa atenuação, sendo estas denominadas por janelas de transmissão. Cada uma destas janelas é centrada num comprimento de onda de operação específico, como se pode constatar na tabela 2.1.
11
Tabela 2.1: Janelas de Transmissão das fibras óticas em vidro.
Janelas de Transmissão Limites das Janelas [nm] Comprimento de Onda de Operação [nm]
1ª Janela 800 – 900 850
2ª Janela 1250 – 1350 1310
3ª Janela 1500 – 1600 1550
A janela de transmissão centrada no comprimento de onda de 850 nm foi a região utilizada nos primeiros sistemas de fibra ótica, obtendo resultados satisfatórios na época em questão [15]. Esta gama espectral é utilizada apenas em fibras multimodo. O avanço da tecnologia das fibras e dos componentes a si associados permitiu o aparecimento da segunda janela de transmissão centrada nos 1310 nm [15]. Esta região passou a ser mais utilizada pois apresentava perdas óticas mais baixas comparativamente com a 1ª janela e permitia a transmissão em regime multimodo e monomodo. Finalmente, anos mais tarde apareceu a terceira janela de transmissão com comprimento de onda de operação de 1550 nm. Esta janela é aplicável somente para fibras monomodo, tendo a transmissão da luz com menor atenuação das três gamas espectrais [13].
As fibras menos utilizadas (plástico), exceto em redes locais de baixo custo e curtas distâncias, operam igualmente em três janelas de transmissão, estando centradas nos comprimentos de onda de 525, 575 e 650 nm [7].
2.1.5 Atenuação
A atenuação, também conhecida por perda de sinal, pode-se definir como a diminuição da intensidade de energia ao propagar-se [7]. Esta é uma das propriedades mais importantes da fibra ótica, pois determina, em grande parte, a distância máxima entre um transmissor e recetor sem recurso a repetidores. Isto é importante devido ao custo elevado do fabrico, instalação e manutenção destes componentes, levando a que o grau de atenuação seja uma grande influência no custo total.
Em termos matemáticos, a atenuação exprime-se em decibel por quilometro [dB.km-1] e representa-se por α, sendo obtida através:
α =10 𝐿 log (
𝑃𝑖
𝑃𝑜)
12
onde Pi e Po são a potência ótica de entrada e saída, respetivamente, e L o comprimento
da fibra. Idealmente, a potência de saída é igual à potência de entrada (referente a uma atenuação nula). Sendo isto ainda impossível devido a pequenas perdas, o objetivo passa por obter uma atenuação muito próxima de zero, elevando assim a qualidade do sinal transmitido. Os mecanismos que provocam o aumento da atenuação são normalmente causados por absorção, espalhamento e deformações mecânicas da fibra. A atenuação varia ainda de acordo com o comprimento de onda utilizado, estando demonstradas na tabela 2.2 o grau de atenuação para cada uma das três janelas de transmissão apresentadas acima [7].
Tabela 2.2: Valores de atenuação para as janelas de transmissão.
Janelas de Transmissão Comprimentos de Onda, 𝞴�[nm] Atenuação,
α[dB/km]
1ª Janela 850 3 – 5 dB/Km
2ª Janela 1310 0.7 – 1.5 dB/Km
3ª Janela 1550 0.2 dB/Km
A tabela 2 permite verificar que a terceira janela de transmissão, centrada nos 1550 nm, apresenta a atenuação mais baixa, permitindo-lhe assim obter melhores resultados à saída e percorrer uma maior distância entre o transmissor e o recetor.
Relativamente às fibras em plástico, destinam-se apenas a pequenas distâncias devido às suas atenuações bastante elevadas, presentes entre os 50 e os 450 dB/Km [7].
2.2 Emissores Óticos
O emissor ótico é o mecanismo responsável pela conversão do sinal elétrico no sinal luminoso que irá percorrer a fibra ótica. A sua estrutura baseia-se normalmente em duas partes constituintes, sendo elas a fonte de luz e um dispositivo de comando capaz de controlar a potência ótica emitida. Em alguns casos, pode ainda possuir um comando de polarização das fontes óticas.
A física associada ao funcionamento dos emissores óticos, assim como as duas fontes de luz mais utilizadas, díodos emissores de luz (LEDs) e díodos LASER, serão apresentados seguidamente.
13
2.2.1 Física
As fontes de luz baseiam o seu funcionamento numa junção pn. Este tipo de junção utiliza duas camadas distintas fabricadas com materiais semicondutores, estando a camada n dopada com átomos dadores de eletrões e a camada p com átomos aceitadores de eletrões. Tal como os díodos normais, os díodos capazes de emitirem luz podem ser polarizados direta ou indiretamente. Se a tensão aos terminais da fonte ótica for tal que o polarize diretamente, irá haver uma corrente elétrica do ânodo (do lado p) para o cátodo (o lado n) [14]. Nesta situação, irá ocorrer uma recombinação com os eletrões da banda de condução da camada n e as lacunas da banda de valência da camada p, como demonstrado na figura 2.9.
Figura 2.9: Transferência de energia numa junção pn.
A situação de recombinação de um eletrão com uma lacuna fará com que transite de um estado de maior energia, Ec [eV], (a banda de condução) para um estado de
menor energia, Ev [eV], (a banda de valência). Esta diferença de energia fará com haja a
emissão de um fotão, ou seja, emissão de luz pela fonte ótica [14]. A geração de fotões pode ser classificada como espontânea, quando um eletrão e uma lacuna emitem apenas um fotão, ou estimulada, quando o fotão gerado leva à criação de um novo fotão. Destas duas formas distintas de geração de fotões resulta a existência dos dois tipos de fontes de luz mais utilizados, os díodos emissores de luz (LEDs) e os díodos LASER.
O comprimento de onda da luz emitida na fibra depende da energia de gap, Eg=Ec-Ev [eV], dos materiais que compõe a junção pn. Entre os materiais constituintes,
somente os semicondutores de gap direto aproveitam o fenómeno da recombinação de eletrões para emitir fotões, ou seja para gerar um feixe de luz [14].Um material de gap
14
direto com energia de gap, Eg [eV], emite fotões de comprimento de onda dado pela lei de Plank:
𝐸𝑔 = ℎ𝑓 =
ℎ𝑐
𝜆 (2.2)
sendo h4.13610-15
eV.s a constante de Plank, f [Hz] a frequência, c=3108 m/s a velocidade da luz no vazio e [m] o comprimento de onda com que os fotões são emitidos.
2.2.2 LEDs
Os díodos emissores de luz, regularmente conhecidos por LEDs (Light Emitting
Diodes), são as fontes mais simples para emissão de luz no interior da fibra ótica [15].
Entre as suas principais características destacam-se a baixa potência de alimentação, grande tempo de vida e a possibilidade de fabricar um elevado número de dispositivos na mesma série. Isto por um lado reduz parcelarmente o custo unitário por componente e simultaneamente permite fabricar equipamento menos exigente em termos elétricos e de dimensões mais reduzidas e consequentemente mais baratos. No entanto, estas fontes de luz apresentam algumas desvantagens quando utilizadas conjuntamente com fibras óticas, salientando-se o seu espectro mais largo, uma menor eficiência de acoplamento da luz e maiores tempos de resposta comparados com outras fontes [15].
Os LEDs, relativamente à estrutura da fibra, apresentam grandes dimensões, impossibilitando assim a sua utilização como fontes óticas em fibras monomodo. Isto leva a que os LEDs apenas possam transportar os feixes luminosos em regime multimodo, e assim sendo apenas têm possibilidade de conduzir a luz nas duas primeiras janelas de transmissão, com comprimentos de onda de 850 e 1310 nm. Consequentemente, estas fontes óticas são utilizadas maioritariamente em sistemas de curto alcance e baixa capacidade.
2.2.3 Díodos LASER
Os díodos LASER (Light Amplification by Stimulated Emission of Radiation) são as fontes óticas com maior capacidade para transmissão da luz ao longo da fibra. Estas fontes de luz apresentam um fabrico mais complexo e de custo superior, comparativamente aos LEDs, denotando ainda um menor tempo de vida. Apesar disto, os díodos LASER apresentam múltiplas vantagens relativamente às fontes óticas
15
expostas anteriormente. Entre elas, destacam-se a potência ótica elevada, um espectro mais estreito e apresentam uma maior eficiência de acoplamento da luz na fibra [15].
Relativamente às dimensões, os díodos LASER são ligeiramente inferiores aos LEDs, permitindo a sua utilização em fibras com tamanhos mais reduzidos do seu núcleo, como as fibras monomodo. Isto leva a que estas fontes de luz possam ser utilizadas em ambos os tipos de fibra, possibilitando o seu funcionamento nas três janelas de transmissão. Com a possibilidade de transmitir com o comprimento de onda de 1550 nm, faz com que os díodos LASER sejam utilizados em sistemas de grande capacidade e de alto fluxo de informação.
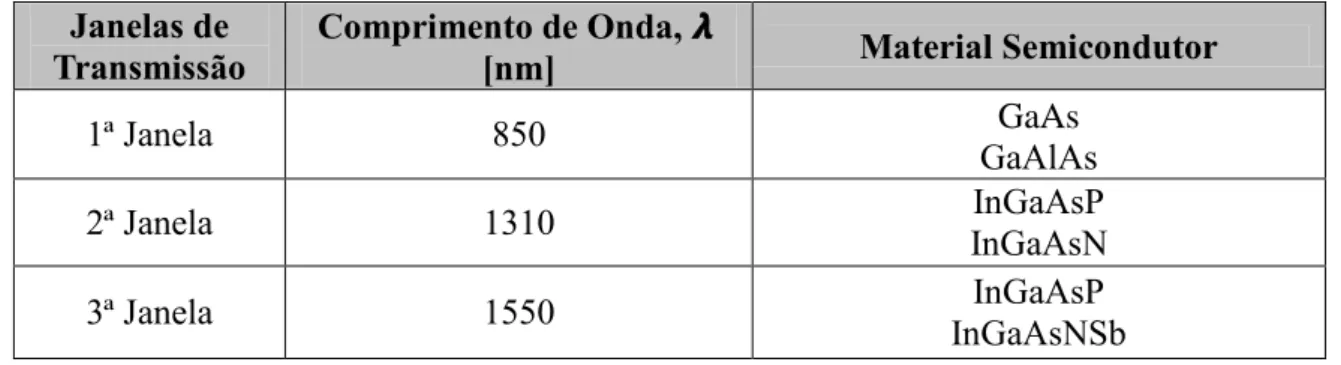
Os materiais utilizados no fabrico das duas fontes óticas apresentadas são os mesmos, variando apenas com o comprimento que se pretende transmitir. Existe uma grande variedade de materiais para fabricar estas fontes, mas apenas os semicondutores de gap direto aproveitam o fenómeno da recombinação de eletrões para emitir fotões, ou seja para gerar um feixe de luz, como referido em cima. Assim os materiais utilizados para o fabrico de LEDs e díodos LASER para as três janelas de transmissão são apresentados na tabela 2.3.
Tabela 2.3: Materiais semicondutores mais utilizados no fabrico de LEDs e díodos LASER.
Janelas de
Transmissão Comprimento de Onda, [nm] 𝞴� Material Semicondutor
1ª Janela 850 GaAs
GaAlAs
2ª Janela 1310 InGaAsP
InGaAsN 3ª Janela 1550 InGaAsNSb InGaAsP
2.3 Detetores Óticos
As comunicações com fibras óticas apresentam na sua parte final um dispositivo capaz de converter os sinais luminosos em corrente elétrica, denominado detetor ótico ou fotodetetor. Estes dispositivos são usualmente díodos semicondutores que operam polarizados inversamente, ou seja, quando um fotodetetor é iluminado, as partículas de energia luminosa, ou fotões, são absorvidas gerando pares eletrão-lacuna, que em presença de um campo elétrico produzem uma corrente elétrica [16]. Esta corrente gerada é bastante baixa, na ordem dos nano-ampére, e portanto torna-se necessária a
16
amplificação de modo a manipular adequadamente o sinal. Normalmente é ainda utilizado um filtro, de forma a eliminar o ruído existente no sinal.
Os detetores óticos apresentam parâmetros essenciais que conduzem à sua seleção, destacando-se a alta sensibilidade, a zona espectral de funcionamento, a contribuição mínima de ruido e a grande largura de banda, conduzindo esta a uma resposta mais rápida. Os fotodetetores com estas características, ou seja, muito rápidos, com alta sensibilidade e pequenas dimensões, que usualmente são utilizados em sistemas de fibra ótica são os fotodíodos PIN, fotodíodos e os fotodíodos de efeito avalanche (APD).
2.3.1 Fotodíodos PIN
O fotodíodo PIN (P-Intrinsic-N) é o detetor mais utilizado nos sistemas de comunicação ótica. Estes fotodetetores são relativamente fáceis de fabricar, altamente fiáveis, apresentam níveis bastante baixos de ruido e são compatíveis com os circuitos amplificadores de tensão. Para além disto, os fotodíodos PIN são sensíveis a uma ampla largura de banda devido a não possuírem qualquer mecanismo de ganho [17].
A estrutura destes detetores óticos compõe-se basicamente por duas zonas (p e n) altamente condutoras, estando entre elas uma zona intrínseca muito pouco condutora. Os feixes de luz provenientes da fibra ótica, ou seja os fotões emitidos, ao entrarem em contacto com a zona intrínseca geram pares eletrão-lacuna. O díodo, contrariamente aos emissores óticos, apresenta uma tensão de polarização inversa (10 V) de modo a acelerar as cargas presentes na zona intrínseca, sendo estas dirigidas para os elétrodos aparecendo sob a forma de corrente elétrica [17]. Este processo é bastante rápido e eficiente, estando demonstrado de forma simplificada na figura 2.10.
Figura 2.10: Estrutura básica de um fotodíodo PIN.
Este tipo de detetores óticos apresenta normalmente um problema inerente ao seu funcionamento, estando este associado à sua baixa sensibilidade. Para resolver esta desvantagem, são utilizados pré-amplificadores de entrada FET (Transístor de Efeito de
17
Campo). Estes transístores melhoram o funcionamento do fotodíodo PIN, tornando a sua largura de banda maior, permitindo a sua utilização nos diferentes tipos de fibra óticas e nas três janelas de transmissão [18].
2.3.2 Fotodíodos
Os fotodíodos apresentam um funcionamento semelhante aos fotodíodos PIN na conversão dos sinais luminosos em corrente elétrica. Estes baseiam-se numa junção pn, de tal modo que quando a luz alcança esta junção é gerada uma corrente elétrica proporcional à luz incidente [17]. Este processo é alcançado quando os fotões emitidos percorrem a zona entre as duas camadas, p e n, conduzindo à geração de pares eletrão-lacuna. Como nos fotodíodos anteriores, o campo elétrico presente proporciona uma rápida recombinação dos pares gerados sendo encaminhados para os elétrodos, gerando assim uma corrente elétrica. Na figura 2.11 está demonstrada a composição dos fotodíodos.
Figura 2.11: Estrutura básica de um fotodíodo.
Observando a figura 2.11, comparativamente com os fotodíodos PIN, destaca-se essencialmente as dimensões da zona entre a camada p e n, ou seja, da zona onde ocorre a geração de pares eletrão-lacuna. Nos fotodíodos, esta zona denota uma área bastante inferior para todo este processo e ocupa a área da determinada zona de depleção. Por esta razão, e ainda pela elevada velocidade de resposta dos fotodíodos PIN, os fotodíodos são usualmente preteridos na seleção de detetores óticos.
2.3.3 Fotodíodos de efeito avalanche (APD)
Os fotodíodos de efeito avalanche ou APD (Avalanche PhotoDiode) são fotodetetores especialmente desenhados para medir os feixes de luz de muito baixa intensidade que outros detetores óticos não são capazes de detetar [17]. Similarmente aos dois tipos de fotodetetores apresentados anteriormente, estes fotodíodos ao serem
18
incididos com luz, ou fotões, geram pares eletrão-lacuna, sendo estes acelerados por um campo elétrico. A particularidade que distingue estes fotodíodos centra-se na sua tensão de polarização inversa ser bastante elevada (100-200 V), levando a que os eletrões devidos aos pares gerados sejam de tal forma acelerados (eletrões quentes) que colidem com a rede cristalina que forma o semicondutor, criando novos pares eletrão-lacuna. Este processo repete-se continuamente, conduzindo a um efeito de avalanche.
Os fotodíodos APD, devido ao seu princípio de funcionamento, são os fotodetores que apresentam uma maior sensibilidade e elevada velocidade de resposta, sendo assim utilizados maioritariamente em sistemas que este fator seja necessário. A sua utilização é menos requisitada que os fotodíodos PIN devido a algumas desvantagens a si associadas, destacando-se o elevado custo, maior ruído e não linearidade provocada pelo efeito avalanche.
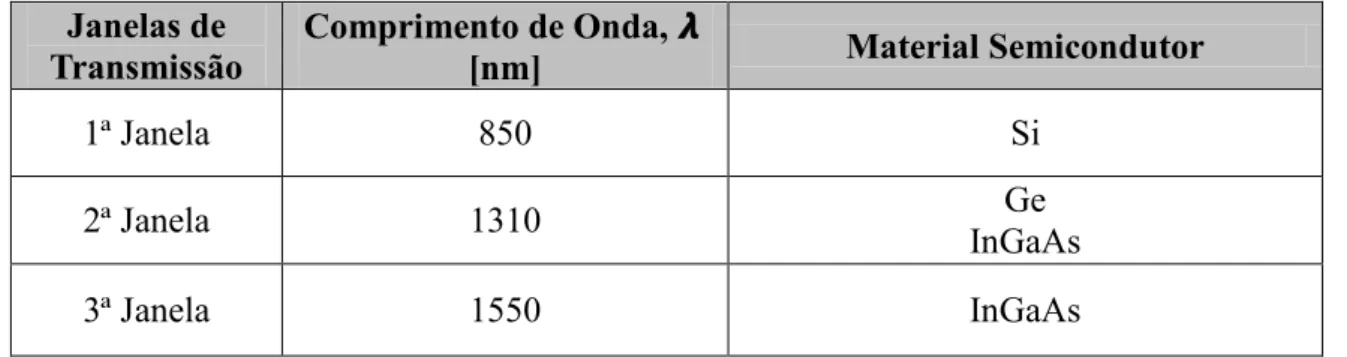
Os materiais semicondutores presentes no fabrico dos fotodíodos APD são os mesmos utilizados na estrutura dos fotodíodos e fotodíodos PIN. A seleção dos materiais está dependente do comprimento de onda que se pretende detetar, ou seja, da janela de transmissão dos feixes de luz. Na tabela 2.4 estão presentes os materiais semicondutores mais utilizados nos diferentes detetores óticos nas três janelas de transmissão [17].
Tabela 2.4: Materiais Semicondutores mais utilizados no fabrico de detetores óticos.
Janelas de
Transmissão Comprimento de Onda, [nm] 𝞴� Material Semicondutor
1ª Janela 850 Si
2ª Janela 1310 InGaAs Ge
3ª Janela 1550 InGaAs
2.4 Juntas e Conetores Óticos
Os sistemas baseados em fibras óticas, tal como os outros sistemas de comunicação, necessitam de uniões capazes de interligar todos os elementos constituintes no processo de transmissão. Estas uniões são normalmente divididas em duas categorias distintas, nomeadamente as juntas e os conectores óticos [19]. As juntas ou emendas são usualmente uniões permanentes e assim utilizadas maioritariamente para fazer um acoplamento de duas fibras. Contrariamente, os conectores são uniões não
19
permanentes, permitindo assim um fácil e rápido conectar e desconectar das fibras óticas. Estes são geralmente utilizados em pontos onde é necessário uma maior flexibilidade das ligações, ou seja, nas uniões da fibra com emissores e detetores óticos.
O processo de união de duas fibras óticas é relativamente complexo, podendo provocar perdas significativas no sinal, se mal executado. Os mecanismos que provocam estas perdas de sinal, assim como as diferentes formas de acoplamento das fibras, são abordados seguidamente.
2.4.1 Acoplamento Fibra-Fibra
A junção de duas fibras é um procedimento recorrente nos sistemas de comunicação ótica, estando o seu número dependente do comprimento da ligação pretendida. Este processo inicia-se com a preparação das extremidades das fibras que se pretendem unir, centrando-se esta como uma etapa crucial para a execução de uma boa junta [19]. A meta passa por obter extremidades completamente lisas e uniformes, e ainda, perpendiculares ao eixo da fibra. Na figura 2.12 são apresentados exemplos de faces defeituosas e de uma face de boa qualidade para a execução de uma junta.
Figura 2.12: Extremidades das fibras óticas: a) Face defeituosa (lábios); b) Face defeituosa (joelho); c)
Face de boa qualidade (plana).
Conforme ilustrado na figura 2.13, para obter uma fibra com uma face de boa qualidade é necessário seguir três passos cruciais. Inicialmente é utilizado um alicate descarnador (a) de forma a retirar o revestimento exterior das fibras óticas, sendo em seguida limpas com álcool etílico (b) para retirar as impurezas provenientes da etapa anterior. Por fim utiliza-se um pequeno aparelho (c) onde se coloca a extremidade da
20
fibra no seu interior e com apenas um passo executa-se o corte, obtendo-se a face plana pretendida.
Posteriormente ao processo de corte, as duas fibras são introduzidas manualmente numa nova máquina (d) capaz de exibir a qualidade das faces produzidas, assim como a posição de ambas as fibras. Se o procedimento anterior tiver sido bem executado e as fibras devidamente alinhadas, pode-se iniciar o processo de união das fibras. Os mecanismos essenciais a todo este procedimento estão demonstrados na figura 2.13.
Figura 2.13: Kit para junção de fibras óticas: a) Alicate descarnador; b) Álcool Etílico; c) Máquina de
corte (Furukawa Electric S325A); d) Máquina de fusão (Furukawa Electric S123C).
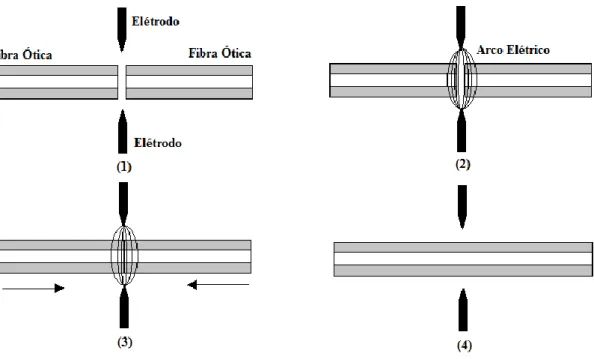
Atualmente existe uma grande variedade de máquinas destinadas ao processo de união das fibras, sendo que a sua maioria recorre ao fenómeno da fusão. Esta união é alcançada colocando as extremidades de ambas as fibras expostas a um elevado aquecimento, levando o seu material a atingir o seu ponto de fusão. Isto ocorre através de uma descarga elétrica provocada entre dois elétrodos onde as fibras estão colocadas [19]. Os passos essenciais deste processo são exemplificados na figura 2.14.
21
Figura 2.14: Etapas do processo de fusão de duas fibras: 1) Posição inicial; 2) Pré-aquecimento das
extremidades; 3) Fibras pressionadas entre si; 4) Junta executada com sucesso.
Como passo final, após obter uma boa união entre as fibras, é colocada uma proteção sobre a junta de modo fornecer o revestimento retirado anteriormente. As máquinas de fusão mais recentes, como a demonstrada na figura 2.13, estão equipadas com um mecanismo capaz de fixar esta proteção à fibra. Na figura 2.15 é exibida a constituição de um empalme de proteção.
Figura 2.15: Empalme de proteção para juntas de fibra ótica.
A junção das fibras acabadas de sair do processo de fusão é inserida na parte central do tubo interior do empalme. A máquina produz um aquecimento sobre o empalme, levando a que o tubo exterior encolha e consequentemente fixe a fibra à camada de proteção. A haste de metal tem como função proteger a junção de sofrer deformações que possam levar à rutura da junta obtida [20].
22
2.4.2 Mecanismos de perdas em juntas
O sucesso ou insucesso do processo de ligação entre duas fibras está dependente na sua maioria da perícia da pessoa que o realiza. As dimensões reduzidas da fibra ótica dificultam a execução deste procedimento, principalmente na fase de corte e alinhamento no interior da máquina de fusão. Estas dificuldades, assim como as próprias características da fibra, podem originar pequenas ou significativas perdas do sinal na junta conseguida. Os mecanismos que provocam perdas nas juntas são assim divididos em fatores extrínsecos e intrínsecos [19].
Entre os fatores extrínsecos, as causas mais comuns capazes de provocar perdas são o desalinhamento mecânico e a qualidade das superfícies das extremidades das fibras. Este último ponto já foi abordado anteriormente, estando representadas na figura 2.12 configurações de faces defeituosas e com boa qualidade. Relativamente ao primeiro ponto, existem diferentes tipos de desalinhamento mecânico, destacando-se o desalinhamento longitudinal, lateral e angular [19]. O primeiro resulta quando as duas fibras estão bem alinhadas mas apresentam uma distância entre as suas extremidades. O desalinhamento lateral ou axial ocorre quando os eixos das duas fibras não apresentam o mesmo alinhamento. O último tipo de desalinhamento ocorre quando é criado um ângulo na junta, de modo que as extremidades das fibras deixam de ser paralelas. Estes três tipos de desalinhamento mecânico são exibidos na figura 2.16.
23
Em relação aos fatores intrínsecos, o desalinhamento dos núcleos das fibras e a discrepância dos índices de refração dos núcleos e bainhas são os principais mecanismos causadores de perdas [19]. No primeiro caso, qualquer diferença na geometria dos dois núcleos origina um desfasamento das áreas de emissão e receção da luz transmitida, deteriorando o sinal. No segundo caso, as perdas são causadas por índices de refração diferentes das duas fibras unidas. Ambas as situações podem ocorrer mesmo que a junta do ponto de vista externo seja efetuada perfeitamente.
2.4.3 Acoplamento Emissor-Fibra e Fibra-Detetor
O acoplamento dos emissores e detetores com a fibra é constituído usualmente por ligações não permanentes, designadas por conectores óticos. Estes são dispositivos, comparativamente com as juntas, mais complexos de fabricar e difíceis de implementar, dado que devem garantir que a união possa ser desfeita e refeita um número incontável de vezes sem que esta perca qualidade. De modo a proporcionar esta qualidade, os conectores devem garantir baixas perdas na ligação durante todo o processo, assim como apresentar imunidade contra fatores exteriores (temperatura, poeiras, etc.). Outras características essenciais para a utilização deste tipo de ligadores são a facilidade de conexão e o baixo custo a si associados. Na figura 2.17 estão demonstrados os principais tipos de conectores utilizados em sistema de comunicação por fibra ótica [21].
24
2.5 FBGs
A popularização da fibra ótica como método de comunicação de dados nas últimas décadas proporcionou um grande crescimento na utilização de sensores a si associados. É neste contexto que surgem os sensores de fibra ótica com redes de Bragg ou FBG (Fiber Bragg Grating). Estes ganharam ainda maior relevância e atenção devido às suas características favoráveis, comparativamente com os sensores elétricos e mecânicos. Entre as principais vantagens, destacam-se a imunidade a interferências eletromagnéticas, baixas perdas na transmissão, dimensões reduzidas e isolamento elétrico [5].
Relativamente aos sensores de fibra ótica, os FBGs distinguem-se pelas suas propriedades óticas e estruturais. Estes não são sensíveis às flutuações da amplitude da fonte ótica, uma vez que o mecanismo de leitura é baseado no comprimento de onda em detrimento da intensidade da luz. Outro ponto a seu favor passa pela inserção da rede Bragg no interior do núcleo com radiação UV, mantendo a estrutura da fibra intacta. Por fim, são um tipo de sensores que podem ser produzidos em larga escala a baixo custo, oferecendo assim uma solução competitiva em termos de preço. Todas estas vantagens levam a que este tipo de sensores apresente um grande crescimento na sua utilização nas mais distintas áreas da indústria, permitindo monitorizar grandezas físicas como deslocamento, vibração ou temperatura.
2.5.1 Princípio de Funcionamento
O FBG pode ser definido como uma microestrutura capaz de provocar uma alteração periódica no índice de refração do núcleo da fibra [22]. O conceito por trás deste fenómeno designa-se por fotossensibilidade. Esta, quando associada a fibras óticas, define-se como a capacidade de introduzir alterações permanentes no índice de refração do núcleo, quando exposto a luz com características específicas ao qual é sensível [23]. Esta alteração no índice de refração leva a que a luz incidente não seja totalmente transmitida, sendo uma pequena parte do sinal refletida. Isto sucede devido ao conceito da teoria da reflexão de Fresnel, já apresentado anteriormente quando explicado o processo de Reflexão Interna Total no interior da fibra ótica. Tal como nesse caso, nas estruturas de Bragg quando a luz incide na fronteira entre dois meios com índices de refração diferentes, esta reflete-se e refrata-se, dividindo-se em dois sinais diferentes [22]. A figura 2.18 demonstra o princípio de funcionamento destes sensores.
25
Figura 2.18: Ilustração do princípio de funcionamento dos FBGs.
Os FBGs utilizam o comprimento de onda como mecanismo de leitura em detrimento da intensidade da luz. O comprimento de onda refletido, também denominado comprimento de onda de Bragg (𝜆�B), permite fazer a caracterização e
estudo sensorial, sendo obtido pela seguinte equação:
𝜆𝐵 = 2𝑛𝑒𝑓𝑓 ∗ 𝛬 (2.3)
onde neff é o índice de refração efetivo e 𝛬�o período de cada elemento constituinte da
rede de Bragg (gratings). Este comprimento de onda varia consoante uma alteração no sistema de medida onde o sensor está colocado e é extremamente sensível a variações axiais relativas ao eixo da fibra. Um exemplo desta variação é demonstrado na figura 2.19. A fibra ótica quando está na sua posição normal apresenta um comprimento de onda característico, presente numa das três janelas de transmissão, diferenciando-se usualmente de sensor para sensor. Sabendo este comprimento de onda, pode-se fazer a análise sensorial observando a sua variação quando a fibra é exposta a condições de teste.
No exemplo da figura 2.19, a fibra ótica é alongada provocando um aumento do período dos gratings da rede de Bragg. Segundo a fórmula 2.3, o comprimento de onda refletido aumenta, uma vez que é diretamente proporcional a este período. Em contrapartida e seguindo o mesmo raciocínio, quando a fibra é comprimida leva a uma diminuição do período dos gratings e por sua vez a um comprimento de onda de Bragg menor. Este conceito permite que estes sensores possam medir diferentes grandezas físicas através do comportamento da fibra associado ao comprimento de onda refletido.
26
Figura 2.19: Comprimento de onda refletido da fibra: a) Posição normal; b) Alongada; c) Comprimida.
2.5.2 Processo de Fabrico
A alteração periódica no índice de refração do núcleo da fibra pode ser introduzida utilizando diferentes métodos baseados na radiação com laser UV [24]. As técnicas por máscara de fase, ponto-a-ponto e por interferómetro são as mais comuns para realizar esta operação, no entanto o método por máscara de fase é o mais utilizado, tanto em laboratório como em processos industriais [22]. A figura 2.20 demonstra o princípio de funcionamento do método da máscara de fase.
27
A máscara de fase apresenta uma estrutura usualmente em silício de elevada qualidade com a finalidade de fornecer total transparência à luz UV. A sua superfície inferior é composta por várias ranhuras, sendo estas obtidas por fotolitografia, agentes químicos ou por feixes de eletrões [22]. O laser de radiação UV é colocado perpendicularmente à máscara de fase, podendo em alguns casos ser introduzida uma lente cilíndrica e uma pequena abertura. A lente tem como função a focagem do feixe de luz UV incidente na secção da fibra onde se pretende introduzir o sensor. A pequena abertura é colocada após a lente de forma a controlar o comprimento da rede de Bragg.
A radiação UV ao percorrer a máscara de fase é dividida em duas ondas distintas, devido às ranhuras presentes na superfície desta. Estas ondas cruzam-se entre si, logo após a máscara, originando um padrão de interferência periódica que ao entrar em contacto com a fibra introduz alterações no índice de refração do núcleo nos locais de maior intensidade [24]. O período deste padrão de interferência vai ser exatamente igual ao dos gratings da rede de Bragg, estando diretamente relacionado com o período das ranhuras da máscara. Este é obtido através da seguinte equação:
𝛬 =𝛬𝑚
2 (2.4)
em que 𝛬�é o período dos gratings da rede de Bragg e 𝛬�m o período das ranhuras da
máscara de fase. A obtenção do período do FBG desta forma é uma das grandes vantagens deste método, uma vez que ao contrário das outras técnicas não depende da luz UV, aumentando assim a imunidade a perturbações externas. Em contrapartida, para fibras com diferentes períodos dos gratings e consequentemente diferentes comprimentos de onda (equações 2.3 e 2.4), é necessário a aplicação de diferentes máscaras de fase, aumentando o custo associado a esta técnica.
2.5.3 Aplicações
As características e funcionalidades dos FBGs atraíram a atenção na última década, tornando-se numa tecnologia muito importante e incontornável nas mais diversas áreas da indústria. Para além de todas as suas vantagens, estes sensores apresentam dimensões reduzidas e um baixo custo a larga escala, permitindo monitorizar uma grande variedade de grandezas desde que alguma forma de deslocamento mecânico esteja presente (deslocamento, temperatura, pressão, etc). Isto leva a que os sectores da indústria utilizem estes sensores em situações distintas e com diferentes finalidades. O ponto em
28
comum que apresentam estas diferentes soluções passa pela forma como os sensores são utilizados. Usualmente, os sensores são encapsulados num material (PVC, PDMS, etc.) capaz de fornecer proteção, sendo posteriormente colados à estrutura que se pretende monitorizar. Na tabela 2.5 estão presentes diferentes áreas, assim como exemplos de aplicações destes sensores [24].
Tabela 2.5: Exemplos de aplicações dos FBGs.
Áreas da Indústria Aplicações
Civil Monitorização da integridade estrutural durante a construção e vida útil; Análise do comportamento estrutural durante testes de carga. Energia Monitorização da vibração e temperatura em postes de alta tensão;
Análise do comportamento das pás dos geradores eólicos. Transportes
Deteção de comboios nas linhas férreas;
Monitorização da integridade da estrutura de cascos de navios.
Petróleo e Gás Natural Monitorização da pressão e temperatura nos furos; Aeroespacial Monitorização da temperatura em satélites de telecomunicações;
Análise do sistema de reabastecimento em voo.
Apesar das suas inúmeras aplicações e vantagens, os FBGs combatem atualmente contra alguns impedimentos do mercado. O desconhecimento de como estes operam e dos seus benefícios, bem como a ideia subliminar da fragilidade das fibras são exemplos destes obstáculos [22].

![Figura 3.3: Modelo CAD da estrutura para conceção dos FBGs em PDMS [30].](https://thumb-eu.123doks.com/thumbv2/123dok_br/17613608.820432/52.892.210.682.105.439/figura-modelo-cad-estrutura-para-conceção-fbgs-pdms.webp)
![Figura 3.4: Ilustração da estrutura finalizada com fibra ótica embebida em PDMS [30].](https://thumb-eu.123doks.com/thumbv2/123dok_br/17613608.820432/53.892.145.749.188.502/figura-ilustração-estrutura-finalizada-fibra-ótica-embebida-pdms.webp)
