Desenvolvimento de um
software
gráfico de código
aberto para análises de circuitos elétricos de potência
Thales Lima Oliveira, Geraldo Caixeta Guimarães, Raul Vitor Arantes Monteiro
[email protected], [email protected], [email protected]Universidade Federal de Uberlândia, Faculdade de Engenharia Elétrica, Uberlândia – MG
Resumo Este artigo apresenta o software PSP-UFU
(Plataforma de Sistemas de Potência da universidade Federal de Uberlândia), desenvolvido para o cálculo de fluxo de carga, cálculo de curto-circuito e análise dinâmica através do programa TransUFU, o qual permite modelar qualquer rede elétrica através de uma interface gráfica. Foi utilizada a linguagem de programação C++, a qual é uma linguagem popular e bastante utilizada na academia, além de ser orientada a objetos. Para validar os métodos de cálculo implementados, alguns casos foram criados no PSP-UFU. É importante destacar que o PSP-UFU é um programa de código fonte aberto, possibilitando a criação de novas ferramentas além daquelas desenvolvidas nesta pesquisa.
Palavras-chave Plataforma de Sistemas de Potência
(PSP-UFU), interface gráfica de usuário, código aberto, análise de circuitos elétricos de potência.
I. INTRODUÇÃO
Com o advento dos computadores tornou-se possível a simulação e análise de eventos através de modelagens matemáticas anteriormente à sua ocorrência, providenciando uma grande economia de recursos. No âmbito da área de sistemas elétricos de potência, foi possível então, simular o comportamento de um circuito elétrico de grande porte e verificar seu comportamento nominal, além de ser possível aplicar distúrbios na rede e examinar suas consequências.
O avanço tecnológico do hardware dos computadores possibilitou uma integração maior com o utilizador dos programas computacionais de sistemas de potência através da
interface gráfica do usuário (GUI, do inglês Graphical User
Interface), permitindo a interação do utilizador através de
elementos gráficos como ícones e outros indicadores visuais, proporcionando assim, uma maior agilidade na criação dos circuitos e análise dos mesmos. Vários programas foram desenvolvidos com essa nova funcionalidade, os quais em grande parte comerciais.
Observa-se então a importância de um software de análise
de sistemas elétricos de potência gratuito com uma interface gráfica amigável. Uma outra característica desejável é que o
programa seja de código aberto (open-source) para a criação
de novos elementos elétricos e desenvolvimentos de novas funcionalidades.
Portanto o objetivo deste trabalho é o desenvolvimento de uma plataforma de análises de circuito elétrico de potência, capaz de realizar os principais cálculos: fluxo de carga, curto-circuito simétrico e assimétrico e análises dinâmicas através do programa TransUFU [1]. Através de uma GUI é possível criar uma rede elétrica de potência genérica, onde estão presentes os principais elementos elétricos que podem ser
inseridos, manipulados e visualizados através de várias ferramentas gráficas.
A linguagem de programação escolhida para desenvolvimento do programa foi o C++, que consiste em uma linguagem multi-paradigma, o qual se destaca a orientação a objetos, sendo uma das linguagens mais populares e bastante utilizada na academia. Para o desenvolvimento da interface
gráfica foi utilizado o wxWidgets, um framework para criação
de GUI multiplataforma [2].
O software desenvolvido foi batizado de Plataforma de Sistemas de Potência da Universidade Federal de Uberlândia (PSP-UFU).
II. FUNCIONALIDADES DO PSP-UFU
O programa PSP-UFU possui três grandes
funcionalidades: cálculo do fluxo de carga, cálculo de curto-circuito (simétrico e assimétrico) e análise dinâmica através do programa TransUFU [1].
O fluxo de carga consiste na determinação da tensão corrente e potência sob condições reais ou ideais de operação normal. Esses estudos são fundamentais para planejar a expansão do sistema, uma vez que a operação satisfatória desse sistema depende do conhecimento dos efeitos da interligação com outros sistemas, de novas cargas, de novas centrais geradoras e de novas linhas antes que elas sejam instaladas [3]. Esse estudo é ideal para diagnóstico e solução de problemas relacionados à qualidade de serviço, uma vez que o PSP-UFU possui elementos elétricos que permitem essas análises como geradores, cargas (potência e impedância constantes), capacitores, indutores, transformadores com TAP variável, etc.
O objetivo principal da análise de curto-circuito é o cálculo das correntes e tensões de falta para especificação de disjuntores e relés de proteção [4]. Porém é possível realizar estudos relacionados aos valores de afundamentos e elevações de tensão durante o momento da falta, além do desequilíbrio causado pela mesma. Com o cálculo de curto-circuito do PSP-UFU também é possível determinar o nível de curto-circuito em todos os barramentos do sistema criado.
III. MODELAGENS MATEMÁTICAS
Nesta seção serão apresentados as modelagens matemáticas realizadas no desenvolvimento do PSP-UFU em relação ao cálculo do fluxo de carga e curto-circuito, sendo que modelagem do estudo dinâmico realizado no TransUFU pode ser observada em [1], [4] e [5].
A. Fluxo de carga
Na formulação mais simples do problema a cada barra da rede são associadas quatro variáveis, sendo que duas delas entram no problema como dados e duas como incógnitas [6]:
Vi é o módulo da tensão na barra i;
Θi é o ângulo da tensão na barra i;
Pi é injeção líquida de potência ativa na barra i;
Qi é injeção líquida de potência reativa na barra i.
Relativo às variáveis que são incógnitas e os dados do sistema, podem ser definidas três tipos de barras:
PQ – Pi e Qi são dados, Vi e θi são calculados;
PV – Pi e Vi são dados, Qi e θi são calculados;
REFERÊNCIA –Vi e θi são dados, Pi e Qi são
calculados.
As barras PQ são representadas pelos barramentos de carga, o qual não há geração e controle de tensão. As barras PV são barras onde se dá o controle de tensão através da injeção ou absorção de reativos por meio do controle da excitação de uma máquina síncrona. A barra de Referência tem como função, assim como o próprio nome diz, servir de referência de tensão e ângulo do sistema e também para fechar o balanço de potência ativa e reativa. Esta barra é necessariamente uma barra geradora [6].
1) Modelagem dos componentes de uma rede elétrica: Para
representar matematicamente uma rede elétrica precisamos dos parâmetros característicos de cada elemento, que será representado em uma forma matricial. Essa matriz característica do sistema é chamada Matriz das Admitâncias
(Ybus). Para a construção de Ybus, devemos modelar alguns
componentes básicos do sistema: a linha de transmissão, o transformador e os elementos shunt (capacitores shunt, reatores shunt e cargas de impedância constante).
A linha de transmissão pode ser modelada segundo seu
equivalente π (pi), definido por três parâmetros: a resistência
série, reatância série, e duas susceptâncias shunt.
O transformador, consiste basicamente em uma
impedância (R + jX) em série com um transformador ideal de
relação de transformação 1:t, onde t pode ser um número
complexo, ou seja pode ser inserido o TAP e a defasagem do transformador.
Os elementos shunt, como indutores e capacitores, ou cargas de impedância constante, são representados simplesmente por suas admitâncias. Como seus parâmetros de entrada normalmente se constituem de suas potências nominais, deve-se encontrar suas admitâncias com as seguinte equação:
2
P jQ Y
V
(1)
De posse desses parâmetros podemos construir a matriz
Ybus seguindo as equações expostas abaixo:
ij ij
Y y (2)
1 n ii ii ij
j j i
Y y y
(3)
Onde:
Yii e Yij- Elementos da diagonal e fora da diagonal,
respectivamente, da matriz admitância;
yij - Admitância dos parâmetros série da linha ou
transformador;
yii - Admitância shunt composta pelas capacitâncias
shunt da linha, dos capacitores e reatores shunt, além das cargas de impedância constante.
O transformador que possuir TAP fora do nominal e/ou defasagem diferente de zero deve ser inserido na matriz admitância segundo a equação matricial abaixo [3] e [4]:
* | |2 ii ij
ji jj
y y
Y Y t
y y
Y Y
t t
(4)
Onde: t é o número complexo que representa o TAP e a
defasagem do transformador
2) Equacionamento: Aplicando a Lei de Kirchhoff sobre a
corrente na sua forma matricial em cada barra (nó), obtemos a seguinte expressão:
bus bus bus
I Y V
(5)
Onde:
Ibus - Vetor das correntes de barra;
Ybus - Matriz admitância;
Vbus - Vetor das tensões de barra.
Utilizando as potências de barra (Si) no lugar das correntes
e extraindo a potência ativa e reativa, obtemos:
1
(
)
n
i ij i j ij j i
j
P
Y V V
cos
(6)1
( )
n
i ij i j ij j i
j
Q Y V V sen
(7)Onde:
Pi - Potência ativa injetada na barra i;
Qi - Potência reativa injetada na barra i;
Vi e Vj - Tensões nas barras i e j, respectivamente;
Yij - Admitância do ramo entre as barras i e j;
θi e θj - Ângulos das tensões em i e j, respectivamente;
O conjunto das n equações mostradas em (6) e (7) são
chamadas de Equações Estáticas do Fluxo de Carga (EEFC) [7].
As equações do fluxo de potência entre barras i e j são dadas por:
2
( )
( )
ij i ij i j ij ij i j ij ij
P
V
g
V V g
cos
V V b sen
(8)2 ( ) ( ) ( )
ij i ij ii i j ij ij i j ij ij Q V b b V V b cos V V g sen (9)
Onde:
Pij - Potência ativa que flui da barra i para a barra j;
Qij - Potência reativa que flui da barra i para a barra j;
Vi e Vj - Tensões nas barras i e j respectivamente;
gij - Condutância do ramo entre as barras i e j;
bij - Susceptância do ramo entre as barras i e j;
bii e bjj - Susceptâncias shunt das barras i e j
respectivamente (cujo valor é zero em transformadores);
θij - Diferença dos ângulos das tensões em i e j (ângulo
de potência).
Os fluxos contrários (da barra j para a barra i) são obtidos analogamente.
Como podemos observar as equações são não lineares, sendo necessária a sua solução através de métodos numéricos, o qual no PSP-UFU foi desenvolvido o método de Gauss-Seidel.
3) Método de Gauss-Seidel para solução de fluxo de carga:
Após o cálculo da matriz das admitâncias, é necessário calcular as tensões e ângulos de cada barramento. O ponto de partida para a aplicação do método de Gauss nos estudos de fluxo de carga é a combinação de (6) e (7), que pode ser arranjada de forma a explicitar a tensão a ser calculada em uma barra i:
( 1) ( )
( ) 1
1
*
nv i i v
ij
i v j
j
ii i
j i
P
jQ
V
Y V
Y
V
(10)
A equação (10) será resolvida para todas as tensões de barra, exceto para a barra de referência cuja tensão especificada permanecerá fixa durante os cálculos [7].
Para as barras do tipo PV, onde são fixadas as tensões e tem a potência reativa como uma das incógnitas, será necessário calcular essa grandeza antes de se aplicar (10). A potência reativa pode ser obtida da seguinte forma:
1
Im * n
calc
i i i ij j
j
Q Q V Y V
(11)
O valor encontrado em (11) deve ser inserido em (10), porem será atualizado somente o ângulo da tensão, já que na barra PV o módulo da mesma é fixado.
Para iniciar as iterações do método são necessários valores iniciais para as magnitudes das tensões que devem ser calculadas e também para os ângulos das barras. Normalmente
para barras do tipo PQ tem-se Vi0 = 1,0 + j0,0 [p.u.] e para
barras do tipo PV Vi0 = Viesp + j0,0 [p.u.]. A barra de referência
tem o módulo e ângulo de tensão fixados.
Para as demais iterações, uma vez obtidos os novos valores de tensão, o processo se repete sempre atualizando o valor das tensões até que seja obtida a convergência. O processo de convergência é obtido quando o maior erro absoluto de tensão é menor que um valor pré-estipulado.
No método de Gauss-Seidel, apenas os valores de tensões ainda não calculadas na iteração atual são da iteração anterior, ou seja, cada valor calculado é utilizado nos cálculos seguintes até o final da iteração. Esse processo é chamado de substituição sucessiva [7].
B. Curto-circuito
Os seguintes cálculos de falta podem ser realizadas pelo
PSP-UFU: trifásico; fase-fase; fase-fase-terra; fase-terra.
Para a solução das faltas assimétricas (fase-fase, fase-fase-terra e fase-fase-fase-terra) foi a utilizado componentes simétricas, que consiste em uma das mais poderosas ferramentas para tratar circuitos polifásicos desequilibrados [3].
Nessa ferramenta três fasores desequilibrados de um sistema trifásico podem ser decompostos em três sistemas equilibrados. A conversão dos fasores de componentes de sequência para seus valores de fase são realizados segundo a equação matricial abaixo [3]:
012 abcV A V
0 2
1 2
2
1 1 1
1 1
a
b
c
V V
V a a V
V a a V
(13)
Onde:
Va, Vb, e Vc – Valores de fase;
V0, V1, e V2 – Fasores de sequência (zero, positiva e
negativa, respectivamente);
a – Valor de .
A transformação inversa é realizada através de [A]-1 e pode
ser aplicada em qualquer fasor do sistema.
1) Modelagem dos componentes para cálculo de curto-circuito: A representação matemática da rede elétrica para
cálculo de curto-circuito é realizada, assim como no fluxo de carga, através da matriz das admitâncias. Entretanto para as faltas assimétricas são utilizadas outras duas matrizes admitâncias: sequência negativa e zero.
A formação dessas matrizes é realizada através de (2) e (3), as quais são solicitadas ao usuário as impedâncias de sequência de cada componente através de formulários.
Se uma impedância for inserida entre o neutro e a terra de um circuito ligado em estrela, deverá ser considerado uma impedância de três vezes seu valor na formação da matriz de sequência zero [3].
Os componentes modelados para esse tipo de cálculo são similares ao fluxo de carga, com exceção das cargas de potência constante e dos transformadores.
2 3
As cargas de potência constante devem ser modeladas como impedância constante, como é mostrado em (1). Isso é necessário devido às baixas tensões nos barramentos causadas pela falta, sendo essa estratégia consistente, pois a carga não pode consumir sua potência nominal em tensões anormalmente baixas [8].
Para as matrizes de sequência positiva e negativa, os transformadores são modelados da mesma forma que o fluxo de carga, inclusive os transformadores com TAP fora do nominal e defasagem diferente de zero mostrado em (4), com
a única exceção do valor de t inserido na matriz de sequência
negativa ser o seu conjugado.
Os valores de sequência zero dos transformadores a serem inseridos na sua matriz correspondente depende de sua conexão segundo a tabela abaixo [3]:
TABELAI.VALORESDAMATRIZADMITÂNCIADEACORDOCOM ACONEXÃODOTRANSFORMADOR.
Conexão Yii Yij
Estrela* - Estrela*
Estrela* - Delta Admitância de seq. zero Admitância de seq. zero Admitância de seq. zero 0,0
Onde:
Yii e Yij - Elementos da diagonal e fora da diagonal,
respectivamente, da matriz admitância; Estrela* - Conexão estrela aterrado.
Para as demais conexões os valores a serem inseridos na matriz admitância são zero.
Após a formação das matrizes admitância de sequência, invertem-se as mesmas para obteção da matriz impedância de
barras (Zbus) e utilização de seus valores nas equações de
cálculo do curto-circuito.
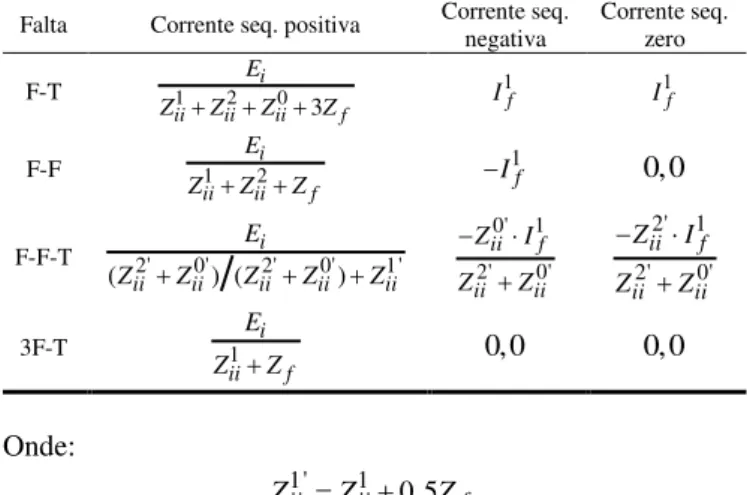
2) Equacionamento: Para cada tipo de falta são calculadas as
suas correntes de sequência [4]:
TABELAII.EQUAÇÕESPARACÁLCULODASFALTAS. Falta Corrente seq. positiva Corrente seq. negativa Corrente seq. zero
F-T 1 2 i 0 3 ii ii ii f
E Z Z Z Z
1 f
I I1f
F-F 1 2i ii ii f
E Z Z Z
1
f I
0,0
F-F-T 2' 0' 2' 0' 1'
( ) ( )
i
ii ii ii ii ii E
Z Z Z Z Z
0' 1 2' 0'
ii f
ii ii
Z I
Z Z
2' 1
2' 0'
ii f
ii ii
Z I
Z Z
3F-T 1 i
ii f E
Z Z 0,0 0,0
Onde:
1' 1
2' 2
0' 0
0,5
0,5
0,5
ii ii f
ii ii f
ii ii f
Z Z Z
Z Z Z
Z Z Z
Z1
ii, Z2ii e Z0ii - Elementos correspondentes ao barramento
i da diagonal da matriz de impedâncias de sequência positiva,
negativa e zero, respectivamente;
Zf - Impedância de falta;
Ei - Tensão pré-falta do barramento i.
A partir do cálculo das correntes de falta, pode-se obter as tensões de falta em todos os barramentos através da equações matriciais:
1 1
1
2 2
2
0 0
0
f f
f f
f f
V E Z I
V Z I
V Z I
(14)
Para converter os valores de tensão e corrente para seus valores de fase basta aplicar (13).
IV. PLATAFORMA DE SISTEMAS DE POTÊNCIA
(PSP-UFU)
A plataforma desenvolvida nesse trabalho tem como objetivo proporcionar o estudo de fluxo de carga, curto-circuito e dinâmico de um sistema elétrico de potência através da criação dos circuitos com o auxílio de elementos gráficos de forma fácil e intuitiva.
Como o programa PSP-UFU é gratuito e de código aberto, o mesmo é possível de ser adquirido através do contato por e-mail com os autores deste artigo.
A. Linguagem de programação e bibliotecas utilizadas
Para proporcionar uma GUI, tornou-se necessário o estudo de uma linguagem de programação e ferramentas para auxiliar a sua criação. Foi escolhida a linguagem de programação C++ com suas bibliotecas padrões em conjunto com as bibliotecas de criação de interface gráfica do wxWidgets [2].
São inúmeros os motivos para a escolha do C++ como a linguagem de programação, os quais podem-se citar as principais: linguagem gratuita e aberta; grande portabilidade, o que permite seu uso em várias plataformas, vasto suporte bibliográfico, tanto livros quanto em fóruns de discussão online e finalmente possui o paradigma de orientação a objetos, o qual foi utilizado na criação do PSP-UFU.
O wxWidgets é um framework para criação de GUI
multiplataforma [2]. Suas bibliotecas são distribuídas de forma aberta e gratuita, além de serem de domínio público. Com isso foi possível desenvolver uma interface gráfica amigável com aparência nativa nas plataformas Windows e Linux.
B. Criação de uma rede elétrica no PSP-UFU
Os projetos podem ser criados através da barra de menu
principal na opção Novo Projeto ou pela ferramenta
Fig. 1. Tela principal do PSP-UFU na plataforma Windows
Os elementos elétricos desenvolvidos são: barramento, gerador, transformador, linha de transmissão, carga (potência constante e impedância constante), compensador síncrono, capacitor shunt, reator shunt e motor de indução. Esses elementos, com exceção dos barramentos, são conectados em uma ou entre duas barras (linha de transmissão e transformadores), e poderão ser inseridos em um menu de acesso rápido, um menu de contexto ou pelas teclas de atalho de cada referentes a cada objeto.
Também foi criado um elemento de texto que pode ser inserido na rede criada para obter alguns dados de forma rápida ou destacá-los em relatórios.
Cada elemento possui propriedades elétricas e gráficas que podem ser editadas através de formulários que são exibidas ao selecionar e clicar duas vezes sobre o objeto a ser modificado. Para manipular a rede criada foram desenvolvidas algumas ferramentas intuitivas e de fácil utilização, são elas: selecionar, mover, girar, arrastar, zoom, encaixar, desfazer, refazer, copiar, colar, e excluir. Tais ferramentas permitem a personalização, navegação e auxiliam a criação de redes
elétricas de potência no software PSP-UFU.
C. Solução da rede elétrica de potência
Após a criação do circuito pode-se solucionar o fluxo de carga e curto-circuito individualmente através do menu
Ferramentas, a análise dinâmica é realizada através do menu TransUFU. Caso a ferramenta de solução instantânea esteja
ativada, os cálculos de curto e fluxo de carga são realizados a cada modificação da rede, como acionamento de disjuntores e modificação dos parâmetros de um elemento.
As opções genéricas de curto e fluxo de carga são
encontradas no menu Opções do projeto, o qual pode-se editar
a potência base do sistema, o ângulo do barramento de referência, o máximo de iterações que o método numérico poderá atingir e o erro para convergência do método
selecionado. Para a análise dinâmica utiliza-se o menu Opções
do TransUFU, onde está presente todas as opções do desse
programa [1].
V. SIMULAÇÕES
Nesta seção são exibidas algumas simulações que podem
ser realizadas no software desenvolvido e para isso foi
utilizado o sistema de teste de 9 barras [9].
Fig. 2. Sistema teste de 9 barras criado no PSP-UFU
A. Fluxo de carga
Para o cálculo do fluxo de carga foi utilizada a condição de carga nominal presente em [9]. Com isso obteve-se os seguintes resultados:
TABELAIII.DADOSDEBARRASCALCULADOSPELA FERRAMENTADEFLUXODECARGADOPSP-UFU
Nome Tensão
[p.u.] Ângulo P [MW] Q [MVAr] Barra 1 1,040000 0,000000° 163,000000 6,653606 Barra 2 1,025000 9,279939° 0,000000 0,000000 Barra 3 1,025000 4,664694° -100,000000 -35,000000 Barra 4 1,025788 -2,216806° 0,000000 0,000000 Barra 5 0,995631 -3,988839° 85,000000 -10,859735 Barra 6 1,012654 -3,687428° -125,000000 -50,000000 Barra 7 1,025769 3,719640° -90,000000 -30,000000 Barra 8 1,015883 0,727475° 0,000000 0,000000 Barra 9 1,032353 1,966659° 71,641611 27,045858
TABELAIII.DADOSDERAMOSCALCULADOSPELAFERRAMENTA DEFLUXODECARGADOPSP-UFU
B. Curto-circuito
Para o cálculo de curto-circuito aplicou-se uma falta fase-terra franco na fase A do barramento 6. Os dados de impedância de sequência do circuito são apresentados na tabela em anexo.
Os resultados são exibidos abaixo, os quais os dados de correntes estão em amperes e de tensão estão em p.u.:
TABELAIV.VALORESDASCORRENTESDEFALTACALCULADAS FERRAMENTADECURTO-CIRCUITODOPSP-UFU Barra
em curto
Fase A Fase B Fase C Corrente Ângulo Corrente Ângulo Corrente Ângulo Barra 6 527,195 -74,459° 0,000 0,000° 0,000 0,000°
TABELAV.VALORESDASTENSÕESDEFALTACALCULADAS FERRAMENTADECURTO-CIRCUITODOPSP-UFU
Nome Tensão Fase A Ângulo Tensão Fase B Ângulo Tensão Fase C Ângulo Barra 1 0,259 13,793º 1,425 -128,33º 1,117 142,29º Barra 2 0,431 32,419º 1,343 -119,70º 1,117 148,41º Barra 3 0,332 24,477º 1,370 -123,77º 1,104 145,17º Barra 4 0,193 7,648º 1,440 -130,32º 1,097 141,85º Barra 5 0,212 2,969º 1,422 -131,84º 1,060 141,41º Barra 6 0,000 179,99º 1,494 -133,52º 1,133 143,95º Barra 7 0,362 22,144º 1,380 -124,23º 1,093 144,66º Barra 8 0,310 15,681º 1,396 -127,06º 1,078 143,24º Barra 9 0,286 18,962º 1,406 -126,05º 1,101 143,79º
C. Análise dinâmica
Para a análise dinâmica foi inserido um curto-circuito trifásico franco com duração de 100 ms no barramento 6.
A figura abaixo mostra a tensão terminal dos geradores do sistema, os quais pode-se observar seu comportamento ao longo do tempo:
Fig. 3. Comportamento da tensão terminal dos geradores do sistema em um curto-circuito
VI. CONCLUSÕES
Este artigo demonstrou que o software PSP-UFU
desenvolvido proporciona, de forma fácil e intuitiva, ferramentas gráficas para construção de redes elétricas de potência genéricas, além de apresentar resultados coerentes com a realidade para estudos relativos ao fluxo de carga, curto-circuito e dinâmicos. Com isso, pretende-se oferecer uma ferramenta computacional versátil para estudos de fluxo de
carga que poderá ser utilizada pelos alunos e professores dos cursos de Engenharia Elétrica bem como por profissionais da área.
Finalmente, ressalta-se que o programa PSP-UFU tem grande potencial para criação de novas ferramentas já que utiliza uma linguagem de programação de fácil compreensão (C++) com um vasto suporte, além de ser gratuito e possuir código fonte aberto.
VII.REFERÊNCIAS
[1] GUIMARÃES G. C. “Manual do TransUFU: Programa de
Análise de Estabilidade Transitória da UFU”, Universidade
Federal de Uberlândia, 2000.
[2] WXWIDGETS. “wxWidgets: Cross-Platform GUI
Library”. Disponível em <http://www.wxwidgets.org/>.
Acesso: 10/02/2015.
[3] STEVENSON JR.; WILLIAN D. “Elementos de Análise de Sistemas de Potência”. 2ª ed. São Paulo: McGraw-Hill, 1986.
[4] ARRILLAGA, J.; ARNOLD, C. P.; HARKER, B. J.
“Computer Modellingof Electrical Power System”. London: John Wiley, 1983.
[5] GUIMARÃES G. C. “Computer methods for transient
stability analysis of isolated power generation system with special reference to prime mover and induction motor
modelling” 1990. 281 f. Tese (Doctor of Philosophy) –
Department of Engineering, University of Aberdeen.
[6] MONTICELLI, A. J.. “Fluxo de Carga em Redes de
Energia Elétrica”. São Paulo: Edgard Blücher, 1983.
[7] RESENDE, J. W. “Introdução ao estudo de fluxo de
potência em sistemas elétricos”. Apostila da disciplina de
análise de sistemas elétricos. Uberlândia: Universidade Federal de Uberlândia, 2010. 134p.
[8] IEEE Task Force on Load Representation for Dynamic
Performance “Standard load models for power flow and
dynamic performance simulation”. IEEE Trans. Power Syst.,
vol. 10, no. 3, pp. 1302–1313, 1995.
[9] ANDERSON P. M.; FOUAD A. A. “Power System
Control and Stability”. New York: IEEE Press, 1994.
VIII.ANEXO
TABELAVI.VALORESDASIMPEDÂNCIASDESEQUÊNCIADO SISTEMADE9BARRAS
Nome
Seq. Positiva [p.u.]
Seq. Negativa
[p.u.] Seq. Zero [p.u.]
R X R X R X
Gerador 1 0,0000 1,0000 0,0000 1,0000 0,0000 1,0000 Gerador 2 0,0000 1,0000 0,0000 1,0000 0,0000 1,0000 Gerador 3 0,0000 1,0000 0,0000 1,0000 0,0000 1,0000 Transf. 1-4 0,0000 0,0576 0,0000 0,0576 0,0000 0,0576 Transf. 2-7 0,0000 0,0625 0,0000 0,0625 0,0000 0,0625 Transf. 3-9 0,0000 0,0586 0,0000 0,0586 0,0000 0,0586 Linha 7-8 0,0085 0,0720 0,0085 0,0720 0,0212 0,1800 Linha 8-9 0,0119 0,1008 0,0119 0,1008 0,0298 0,2520 Linha 7-5 0,0320 0,1610 0,0320 0,1610 0,0800 0,4025 Linha 5-4 0,0100 0,0850 0,0100 0,0850 0,0250 0,2125 Linha 9-6 0,0390 0,1700 0,0390 0,1700 0,0975 0,4250 Linha 6-4 0,0170 0,0920 0,0170 0,0920 0,0425 0,2300
MS_001_Barra_1_.adf : *V(pu) MS_002_Barra_3_.adf : *V(pu)
MS_003_Barra_2_.adf : *V(pu)
0 1 2 3 4 5