Universidade Federal do Cear´
a
Centro de Tecnologia
Programa de P´
os Gradua¸c˜
ao em Engenharia El´
etrica
Controladores Robustos
D
-LQI e
D
-Aloca¸c˜
ao de
polos Otimizados via LMI Aplicados a um
Conversor Boost Alto Ganho com C´
elula de
Comuta¸c˜
ao Trˆ
es Estados
Marcus Vinicius Silv´
erio Costa
i
Marcus Vinicius Silv´
erio Costa
Controladores Robustos
D
-LQI e
D
-Aloca¸c˜
ao de
polos Otimizados via LMI Aplicados a um
Conversor Boost Alto Ganho com C´
elula de
Comuta¸c˜
ao Trˆ
es Estados
Dissertac¸˜ao submetida `a Universidade Fede-ral do Cear´a como parte dos requisitos para a obtenc¸˜ao do grau de mestre em Engenharia El´etrica.
Orientador:
Prof. Jos´e Carlos Teles Campos, Dr
Fortaleza
Dados Internacionais de Catalogação na Publicação Universidade Federal do Ceará
Biblioteca de Ciências e Tecnologia
VM315c Costa, Marcus Vinicius Silvério.
Controladores robustos D-LQI e D-Alocação de polos otimizados via LMI aplicados a um conversor boost alto ganho com célula de comutação três estados / Marcus Vinicius Silvério Costa – 2012.
120 f. : il., color., enc. ; 30 cm.
Dissertação (mestrado) – Universidade Federal do Ceará, Centro de Tecnologia, Departamento de Engenharia Elétrica, Programa de Pós-Graduação em Engenharia Elétrica, Fortaleza, 2012.
Área de Concentração: Engenharia Elétrica (Engenharias IV). Orientação: Prof. Dr. José Carlos Teles Campos.
1.Controle robusto. 2. Realimentação de estados. I. Título.
iv
Dedicat´
oria
Este trabalho ´e dedicado `a Deus, ao meu
v
Agradecimentos
Primeiramente a Deus, que me deu forc¸as para conclus˜ao deste trabalho.
Ao meu pai Emilson Santos Costa (in memorian) que se sacrificou, acreditando na minha
capacidade em superar desafios, `a minha m˜ae Maria Joita Silv´erio Costa, que testemunhou
minhas longas horas para conclus˜ao desta obra.
Ao orientador professor Dr. Jos´e Carlos Teles Campos , que me orientou e acompanhou na
conclus˜ao deste trabalho.
Ao Francisco Everton Uchˆoa Reis, que contribuiu significativamente pelo desenvolvimento
desta obra.
Ao meu colega de pesquisa, Vandilberto Pereira Pinto, pelo suporte na pesquisa e na teoria
sobre controle. Agradec¸o tamb´em ao Kelson Leite pelas ajudas nas referˆencias bibliogr´aficas
sobre LMIs.
Aos meus colegas de laborat´orio J. Gleidson e J. Oliveira pela ajuda e suporte.
Ao CNPQ pelo suporte financeiro por meio da bolsa de estudo e ao PPGEE pelo suporte
acadˆemico.
Aos meus Pastores que me apoiaram, durante o per´ıodo de mestrado, para buscar a Paz de
Esp´ırito em Deus.
A todas as pessoas que por motivo de esquecimento n˜ao foram citadas anteriormente, vou
vi
“Bem-aventurado o homem que acha sabedoria, e o homem que adquire conhecimento; porque
´e melhor a sua mercadoria do que artigos de prata, e maior o seu lucro que o ouro mais fino.
Mais preciosa ´e do que os rubis, e tudo o que mais possas desejar n˜ao se pode comparar a ela. ”
vii
Resumo
Este trabalho visa a aplicac¸˜ao dos controles robustos D-LQI eD-Alocac¸˜ao de polos
oti-mizados via LMIs em um conversorboost de alto ganho de tens˜ao com c´elula de comutac¸˜ao de trˆes estados. Este conversor consiste numa topologia moderna derivada do conversorboost cl´assico. Oboost ´e considerado um elevador de tens˜ao, o qual converte uma entrada na faixa de 42−54V `a 400V. O conversorboostproposto ´e reduzido ao modelo de um conversor equi-valente e ´e modelado no espac¸o de estados m´edio, em que ´e observado que a matriz D6=0, sendo ent˜ao uma modelagem que apresenta uma peculiaridade de acordo com a literatura, pois a soluc¸˜ao de controle ´e mais complexa. As estrat´egias de controle aplicadas usam de procedi-mentos matem´aticos denominados de Desigualdades Matriciais Lineares (LMIs-Linear Matrix Inequalities), que podem ser resolvidos por otimizac¸˜ao convexa ou programac¸˜ao semidefinida positiva (SDP procedures). As ferramentas matem´aticas utilizadas para resoluc¸˜ao das LMIs neste trabalho s˜ao o Yalmip e SeDuMi , que s˜ao inseridas no MATLAB . Al´em disso s˜ao anali-sadas as incertezas presentes no processo, bem como a robustez do modelo em malha fechada. S˜ao obtidos os resultados de simulac¸˜ao via MATLAB -PSIM e s˜ao feitas as an´alises referentes a estes resultados, al´em da an´alise dos resultados experimentais e a conclus˜ao do estudo, al´em das propostas de trabalhos futuros. O Apˆendice mostra os procedimentos de instalac¸˜ao dos resolvedores al´em do uso correto com base nas equac¸˜oes descritas na teoria sobre LMIs.
N´umero de p´aginas:120
Palavras-chave:D-LQI,D-Alocac¸˜ao de polos, Controle Robusto, Conversorboostde Alto
viii
Abstract
This work involves the application of robust controls D-LQI and D-pole placement via
LMIs in a high-gainboostwith three states switching cell. This converter consists of a modern topology derived the classic boost converter . This boost converter is considered a step-up converter, which a range of 42−54V voltage input to 400V voltage output. The proposedboost converter is reduced to equivalent model and is modeled at space state avarage, in which is observed that the matrix D6=0, being then a modeling that presents a peculiarity according to literature, thus the control solution is more complex. The control strategies applied use mathematical procedures called Linear Matrix Inequalities (LMIs), which can be solved by convex optimization or positive semidefinite procedures (SDP). The mathematical tools used to solve the LMIs this work are Yalmip and SeDuMi , which are inserted in MATLAB . Further analyzes the uncertainties present in the process, as well as the robustness of closed loop model. The simulation results are obtained via MATLAB and PSIM and analyzes made regarding these results, besides the analysis of experimental results and conclusion of study, in addition to proposals for future work. The Appendix shows the installation procedures and use correct solvers based on the equations described in LMI theory.
Number of pages:120
ix
Sum´
ario
Lista de Figuras xii
Lista de Tabelas xvi
Lista de S´ımbolos xvii
Lista de Acrˆonimos e Abreviaturas xxi
1 Introdu¸c˜ao 1
1.1 Estado da arte sobre os temas . . . 1
1.1.1 Estado da arte sobre o conversorboost . . . 1
1.1.2 Estado da arte sobre as Desigualdades Matriciais Lineares e a teoria do controle . . . 3
1.2 Revis˜ao bibliogr´afica . . . 5
1.3 Objetivos e contribuic¸˜oes deste trabalho . . . 6
1.3.1 Objetivos deste trabalho . . . 6
1.3.2 Contribuic¸˜oes deste trabalho . . . 7
1.3.3 Publicac¸˜oes em congressos . . . 7
1.4 Resumo dos cap´ıtulos . . . 7
1.5 Considerac¸˜oes finais . . . 8
2 Teoria das Desigualdades Matriciais Lineares no Controle por Aloca¸c˜ao de Polos e LQR 9 2.1 Introduc¸˜ao `as desigualdades matriciais lineares - LMIs . . . 9
2.2 Conceitos b´asicos de LMIs . . . 12
2.3 Estabilidade de Lyapunov via LMIs . . . 13
2.4 Politopos . . . 14
2.5 Complemento de Schur . . . 15
2.6 Estabilizac¸˜ao . . . 17
2.7 Controle LQR via otimizac¸˜ao LMI . . . 17
2.8 Restric¸˜ao LMI porD-estabilidade . . . . 19
Sum´ario x
2.9.1 Controle LQR com restric¸˜ao LMI viaD-estabilidade -D-LQR . . . . 22
2.10 An´alise das incertezas polit´opicas . . . 23
2.11 Considerac¸˜oes finais . . . 26
3 Teoria e Modelagem do Conversor boost 28 3.1 Topologia cl´assica dos conversores CC-CC . . . 28
3.2 Conceito do conversor original . . . 32
3.2.1 Reduc¸˜ao do Conversorboostoriginal ao modelo equivalente . . . 33
3.3 Modelagem equivalente do conversorboostno espac¸o de estados . . . 34
3.3.1 Modelo linearizado de conversores CC no espac¸o de estados . . . 34
3.3.2 Modelo no espac¸o de estados doboostequivalente . . . 36
3.4 An´alise das incertezas no conversor . . . 39
3.5 Considerac¸˜oes finais . . . 41
4 Estrat´egias de Controle Aplicado ao Conversor Boost 42 4.1 Servomecanismo com ac¸˜ao integral . . . 42
4.2 Projeto do controlador robusto otimizado por LMI via alocac¸˜ao de polos -D -Alocac¸˜ao de polos . . . 45
4.3 Projeto do controlador robusto otimizado via LQI comD-estabilidade -D-LQI 46 4.4 Considerac¸˜oes finais . . . 47
5 An´alise e Resultados de Simula¸c˜ao do Conversor 48 5.1 Modelo num´erico em malha aberta do conversorboostequivalente . . . 48
5.2 Simulac¸˜ao no PSIM . . . 49
5.3 Resposta do sistema em malha fechada do controle robusto . . . 52
5.3.1 Resultados num´ericos em malha fechada do controle por D-Alocac¸˜ao de polos . . . 52
5.3.2 Resultados num´ericos em malha fechada do controle porD-LQI . . . . 52
5.3.3 An´alise das curvas no regime transit´orio e permanente . . . 53
5.3.4 An´alise das curvas em regime permanente . . . 55
5.3.5 An´alise de robustez das curvas na frequˆencia . . . 60
5.4 Considerac¸˜oes finais . . . 63
6 An´alise e Resultados Experimentais do Conversor 65 6.1 Ambiente real de implementac¸˜ao . . . 65
6.2 Resultados experimentais do controleD-Alocac¸˜ao de polos robusto . . . . 67
Sum´ario xi
6.2.2 Resultados experimentais paraVg=54V . . . 70
6.3 Resultados experimentais do controleD-LQI robusto . . . . 70
6.3.1 Resultados experimentais paraVg=42V . . . 70
6.3.2 Resultados experimentais paraVg=54V . . . 76
6.4 Complicac¸˜oes durante o experimento . . . 84
6.5 Considerac¸˜oes finais . . . 84
7 Conclus˜oes Finais e Propostas de Trabalhos Futuros 85 7.1 Conclus˜oes . . . 85
7.2 Propostas de trabalhos futuros . . . 86
Referˆencias Bibliogr´aficas 87 Apˆendice A -- Introdu¸c˜ao aos pacotes computacionais SeDuMi e Yalmip no MA-TLAB 92 A.1 Procedimento de Instalac¸˜ao dos Pacotes SeDuMi e Yalmip . . . 92
xii
Lista de Figuras
2.1 Soluc¸˜ao de politopos via LMIs. . . 11
2.2 Exemplo de um politopo de 5 v´ertices (PALHARES; GONC¸ ALVES, 2008). . . 15
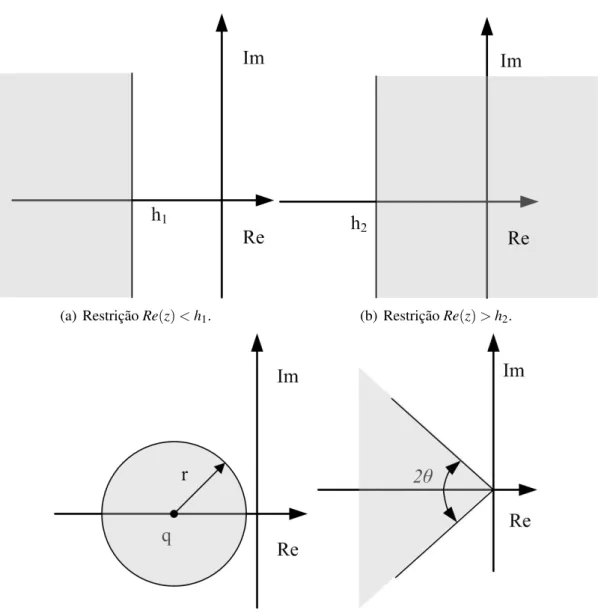
2.3 Restric¸˜oes LMI. . . 21
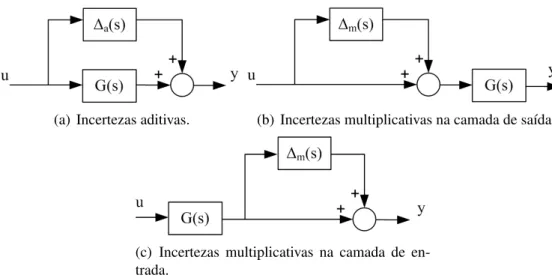
2.4 Representac¸˜ao em diagramas de blocos dos tipos de incertezas aplicado na planta (SHAHIAN; HASSUL, 1993). . . 24
2.5 (a) Func¸˜ao sensibilidadeS(s).(b) Sensibilidade complementarT(s). . . 25
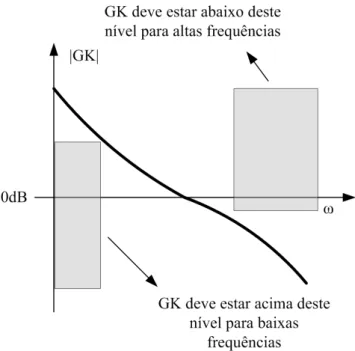
2.6 Curva desej´avel da func¸˜ao de transferˆencia de malha aberta do de um sistema de realimentac¸˜ao. . . 26
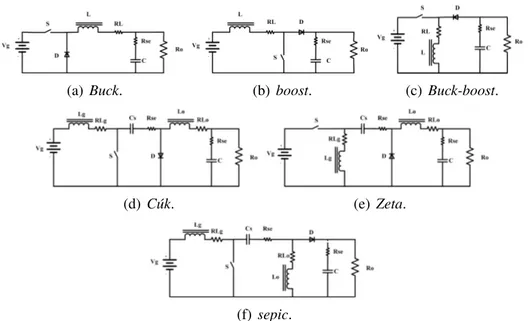
3.1 Topologias cl´assicas de conversores CC-CC. . . 29
3.2 Conversorboostproposto por Bascop´e e Barbi (2000). . . 30
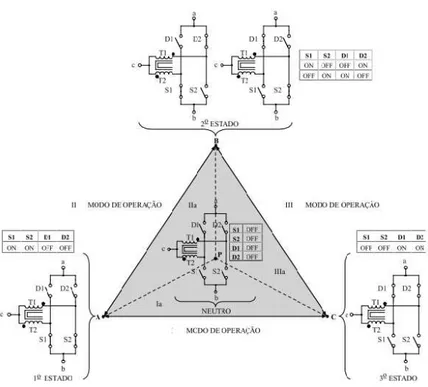
3.3 Princ´ıpio de chaveamento da c´elula de comutac¸˜ao em 3 estados proposto por Bascop´e e Barbi (2000) e aplicado por Santero (2006) . . . 31
3.4 Conversor proposto por Torrico-Bascopeet al.(2006b, 2006c), Bascop´e e Barbi (2000) doboostalto ganho . . . 31
3.5 Topologia do conversorboostde alto ganho de tens˜ao com c´elula de comutac¸˜ao de trˆes estados conforme Orellana-Lafuenteet al.(2010), Reiset al.(2011). . . 32
3.6 Circuito do conversorboostcl´assico equivalente. . . 34
3.7 Definic¸˜ao dos intervalos de chaveamento do conversor (MIDDLEBROOK; CUK, 1976) . . . 35
3.8 Conversorboostnos est´agios de chaveamento. . . 37
3.9 Regi˜ao de incertezas polit´opicasPot×Vg. . . 41
4.1 Servomecanismo de ac¸˜ao integral. . . 42
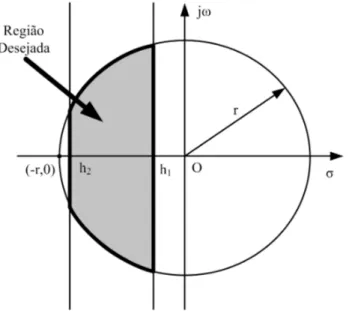
4.2 Regi˜ao desej´avel para o projeto de controle. . . 45
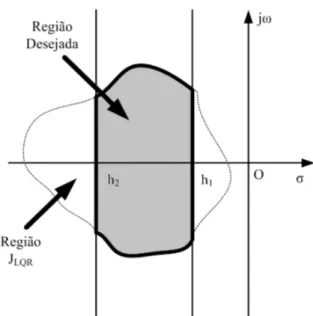
4.3 Regi˜ao desejada aplicada ao LQR comD-estabilidade. . . . 47
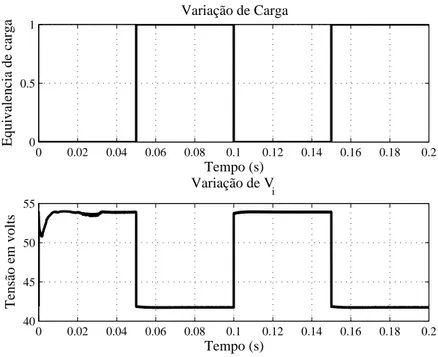
5.1 Variac¸˜ao da carga e da tens˜ao de entrada no conversor. . . 50
5.2 Modelo do conversor original em malha fechada no PSIM. . . 51
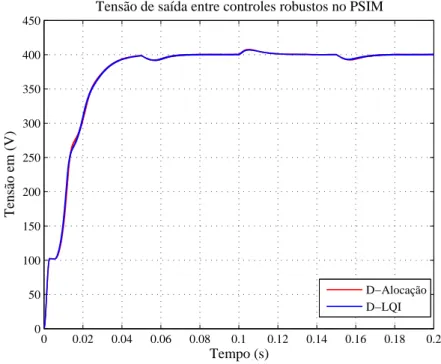
5.3 Tens˜aoVo dos controlesD-alocac¸˜ao de polos eD-LQI para o conversorboost original. . . 53
Lista de Figuras xiii
5.5 Tens˜ao de referˆencia PWM tanto pelo controle porD-alocac¸˜ao de polos como D-LQI para o conversorboostoriginal. . . . . 54
5.6 Tens˜ao e corrente de sa´ıda para o controlador robustoD-Alocac¸˜ao de polos para
Vg=42V. . . 55 5.7 Tens˜ao de sa´ıda e corrente no indutor para o controlador robustoD-Alocac¸˜ao
de polos paraVg=42V. . . 56 5.8 Tens˜ao de sa´ıda e corrente de sa´ıda no conversor para o controlador robusto
D-Alocac¸˜ao de polosVg=54V. . . . 56
5.9 Tens˜ao de sa´ıda e corrente no indutor no conversor para o controlador robusto
D-Alocac¸˜ao de polosVg=54V. . . . 57
5.10 Tens˜ao de sa´ıda e corrente de sa´ıda no conversor para o controlador robusto via
D-LQIVg=42V. . . . . 58
5.11 Tens˜ao de sa´ıda e corrente no indutor no conversor para o controlador robusto
viaD-LQIVg=42V. . . . . 58
5.12 Tens˜ao de sa´ıda e corrente de sa´ıda no conversor para o controlador robusto via
D-LQIVg=54V. . . . . 59
5.13 Tens˜ao de sa´ıda e corrente no indutor no conversor para o controlador robusto
viaD-LQIVg=54V. . . . . 59
5.14 Comparac¸˜ao de incertezas na escolha da mais representativa. . . 62
5.15 An´alise da curvaG(jω)K(jω). . . 62 5.16 Curvas deS(jω)eT(jω)do modelo compensado porD-Alocac¸˜ao de polos e
D-LQI. . . . 63
5.17 An´alise de estabilidade robusta dos controladores D-Alocac¸˜ao de polos e D
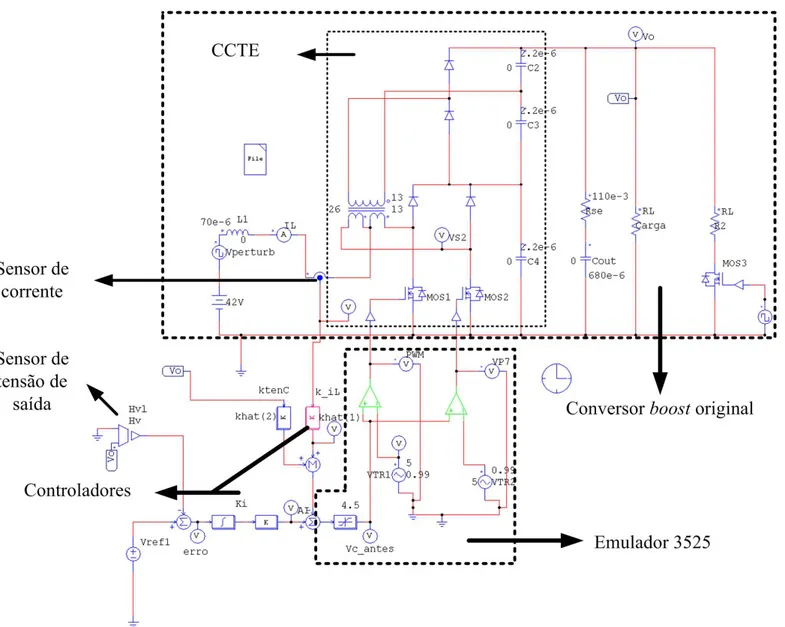
-LQI em relac¸˜ao `a incerteza∆m3. . . 64 6.1 Diagrama geral do circuito com a configurac¸˜ao de controle. . . 66
6.2 Conversorboostoriginal. . . 67
6.3 Tens˜ao e corrente de sa´ıda, sinal de controle aplicada ao conversor em regime
permanente. CanalVo 100V/div, canalIo 200mA/dive canalVPW M 20V/div.
Eixo do tempo (horizontal) 10µs/div. . . 68
6.4 Tens˜ao e corrente de sa´ıda durante a mudanc¸a do degrau de carga. CanalVo
100V/div, canalIo 200mA/div. Eixo do tempo (horizontal) 1ms/div para
Fi-gura 6.4(a) e 20ms/divpara Figura 6.4(b). . . 69
6.5 Tens˜ao e corrente de sa´ıda no momento do degrau de carga . CanalVo 2V/div,
Lista de Figuras xiv
6.6 Tens˜ao e corrente de sa´ıda e sinal de PWM aplicado ao conversor paraVg=54V em regime permanente. CanalVo 100V/div, canal Io 200mA/div. Eixo do
tempo (horizontal) 10µs/div. . . 72
6.7 Tens˜ao e corrente de sa´ıda durante a mudanc¸a do degrau de carga paraVg=54V. CanalVo100V/div, canalIo200mA/div. Eixo do tempo (horizontal) 20ms/div. 73 6.8 Tens˜ao e corrente de sa´ıda no momento do degrau de carga. CanalVo 2V/div, canalIo200mA/div. Eixo do tempo (horizontal) 20ms/div. . . 74
6.9 Tens˜ao de sa´ıda, tens˜ao de entrada e corrente no indutor no momento do degrau de carga. CanalVo 100V/div, canalVg 20V/dive o canal IL 5A/div. Eixo do tempo (horizontal) 20ms/div. . . 75
6.10 Tens˜ao e corrente de sa´ıda e sinal de PWM para o controle D-LQI, sendo Vg=42V.CanalVo100V/div, canalIo200mA/div. Eixo do tempo (horizontal) 10µs/div. . . 77
6.11 Tens˜ao e corrente de sa´ıda para o controleD-LQI com variac¸˜ao de carga, sendo Vg =42V. Canal Vo 100V/div, Io 200mA/div. Eixo do tempo (horizontal) 5ms/divpara Figura 6.11(a) e 20ms/divpara Figura 6.11(b). . . 78
6.12 Tens˜ao e corrente de sa´ıda, sendoVg=42V. CanalVo 2V/div, Io 200mA/div. Eixo do tempo (horizontal) 20ms/div. . . 79
6.13 Tens˜ao de sa´ıda, tens˜ao de entrada e corrente no indutor, sendoVg=42V. Canal Vo100V/div, canalVg20V/dive canalIL 5A/div. Eixo do tempo (horizontal) 20ms/div. . . 80
6.14 Tens˜ao de sa´ıda, corrente no indutor para o controle D-LQI, sendoVg=54V. CanalVo 100V/div, canal IL 5A/div. Eixo do tempo (horizontal) 200ms/div para Figura 6.14(a) e 50ms/divpara Figura 6.14(b) . . . 81
6.15 Tens˜ao de sa´ıda, corrente no indutor com variac¸˜ao de carga, sendoVg=54V. CanalVo2V/div, canalIL 5A/div. Eixo do tempo (horizontal) 20ms/div. . . . 82
6.16 Tens˜ao de sa´ıda, corrente no indutor, sendoVg=54V.CanalVo100V/div, canal Vg20V/dive canalIL5A/div. Eixo do tempo (horizontal) 20ms/div. . . 83
6.17 Tens˜ao de sa´ıda, corrente no indutor para o controleD-LQI em regime perma-nente, sendoVg=54V.Canal Vo 100V/div, canal IL 5A/div. Eixo do tempo (horizontal) 20µs/div. . . 84
A.1 Descompactando pastas SeDuMi e Yalmip . . . 92
A.2 Pasta dotoolboxdo MATLAB . . . 93
A.3 Instalac¸˜ao dos pacotes SeDuMi e Yalmip no MATLAB . . . 93
Lista de Figuras xv
A.5 Instalando o pacote Yalmip no MATLAB . . . 94
A.6 Confirmando os pacotes SeDuMi e Yalmip no MATLAB . . . 95
A.7 Testando o pacote Yalmip nopromptdo MATLAB . . . 95
xvi
Lista de Tabelas
3.1 Parˆametros do conversor original adaptado de Orellana-Lafuenteet al. (2010),
Reiset al.(2011). . . 33
3.2 Parˆametros do conversor equivalente (ORELLANA-LAFUENTEet al., 2010;
REISet al., 2011). . . 34
3.3 Incertezas de Projeto do conversor conforme e Tabela 3.1 condic¸˜oes f´ısicas de
aplicac¸˜ao. . . 40
5.1 Frequˆencias de canto resultantes de cada controle. . . 60
5.2 Autovalores do modelo de malha aberta e fechada do conversor boost equivalente. 61
xvii
Lista de S´ımbolos
Vo- Tens˜ao de sa´ıda do conversor em func¸˜ao do tempo,Vo=Vo(t);
Vg- Tens˜ao de entrada do conversor em func¸˜ao do tempo,Vg=Vg(t)
Dd - Ciclo de trabalho do conversor;
Voeq- Tens˜ao de sa´ıda equivalente do conversor em func¸˜ao do tempo,Voeq =Voeq(t);
Vgeq- Tens˜ao de entrada equivalente do conversor em func¸˜ao do tempo,Vgeq=Vgeq(t);
Ddeq- Ciclo de trabalho do conversor equivalente;
rv - Relac¸˜ao de tens˜ao entre conversor original e o conversor equivalente;
x - Vetor de estados do sistema no espac¸o de estados dimens˜ao xm×1(t) ou dimens˜ao compat´ıvel,x=x(t);
u- Vetor de controle do sistema no espac¸o de estados dimens˜aou1×1(t),u=u(t);
A- Matriz de estado de dimens˜aoAm×mou dimens˜ao compat´ıvel;
B- Matriz de controle de dimens˜aoBm×1ou dimens˜ao compat´ıvel;
C- Matriz de estado de sa´ıda de dimens˜aoC1×mou dimens˜ao compat´ıvel;
D- Matriz de controle de sa´ıda de dimens˜aoD1×1;
∆A- Matriz de estado de incertezas de dimens˜aoAp×pou dimens˜ao compat´ıvel;
∆B- Matriz de controle de incertezas de dimens˜aoBp×1ou dimens˜ao compat´ıvel;
∆C- Matriz de estado de incertezas de sa´ıda de dimens˜aoC1×pou dimens˜ao compat´ıvel;
∆D- Matriz de controle de sa´ıda de incertezas de dimens˜ao;D1×1;
V(x)- Func¸˜ao de Lyapunov;
J - Func¸˜ao custo ou ´ındice de desempenho quadr´atico em func¸˜ao do tempo,J=J(t);
P- Vari´avel semi definida positiva de dimens˜ao de ordemmou compat´ıvel com a matriz
Lista de S´ımbolos xviii
Y - Vari´avel auxiliar de dimens˜ao compat´ıvel com a transposta deB,dim(Y) =dim(B′);
Q- Matriz de ponderac¸˜ao arbitr´aria compat´ıvel com a dimens˜ao deA;
R- Matriz de ponderac¸˜ao arbitr´aria de ordem compat´ıvel ao n´umero de entradas de
con-troleu;
K - Ganho de realimentac¸˜ao de estados compat´ıvel com a transposta de B, dim(K) =
dim(B′);
Z - Matriz auxiliar de minimizac¸˜ao compat´ıvel de ordem compat´ıvel ao n´umero de
entra-das de controleu;
z- Vari´avel complexa no plano da transformada de Laplace;
h1- Limite m´ınimo de restric¸˜ao;
h2- Limite m´aximo de restric¸˜ao;
rr - Raio do disco centrado em(−q,0);
θ - ˆAngulo de restric¸˜ao do setor cˆonico da origem;
D - S´ımbolo de regi˜oes LMIs;
Co- Capacitor de sa´ıda no lado da carga;
Coeq - Capacitor equivalente de sa´ıda no lado da carga;
Rse - Resistˆencia intr´ınseca em serie com o capacitor;
Rseeq - Resistˆencia equivalente intr´ınseca em serie com o capacitor equivalente;
L- Indutˆancia de projeto no conversor original;
Leq- Indutˆancia equivalente de projeto no conversor equivalente;
Ro- Resistˆencia de carga do conversor original;
Roeq - Resistˆencia equivalente de carga do conversor equivalente;
fs- Frequˆencia de chaveamento do conversor;
fseq- Frequˆencia de chaveamento equivalente do conversor;
Lista de S´ımbolos xix
Td - Intervalo de chaveamento;
¯
B- Matriz de controle auxiliar de dimens˜ao ¯Bm×1ou dimens˜ao compat´ıvel;
¯
D- Matriz de controle de sa´ıda auxiliar de dimens˜ao ¯Dm×1ou dimens˜ao compat´ıvel;
X - Vari´avel de estado em regime permanente;
Vo- Vari´avel de sa´ıda em regime permanente;
χ - Vari´avel de estado com pertubac¸˜ao do ciclo de trabalho;
vo- Vari´avel de sa´ıda com perturbac¸˜ao do ciclo de trabalho;
A1,A2- Matrizes de estado do conversor no intervalo de chaveamentoS1eS2;
B1,B2 - Matrizes de entrada de controle do conversor no intervalo de chaveamentoS1 e
S2;
C1,C2- Matrizes de estado de sa´ıda do conversor no intervalo de chaveamentoS1eS2;
D1,D2- Matrizes de entrada de controle do conversor no intervalo de chaveamentoS1 e
S2;
r(t)- Entrada de referˆencia;
S(s)- Func¸˜ao sensibilidade ou func¸˜ao S(s);
T(s)- Func¸˜ao co-sensibilidade ou func¸˜ao T(s);
ξ - Erro de regime integrado;
ˆ
A,Bˆ,Cˆ,Dˆ - Matrizes expandidas de dimens˜oes compat´ıveis com as matrizesA,B,C,D;
VT - Tens˜ao de 5 volts;
u- entrada de controle no conversor, sendou=d;
x - vari´avel de estado, considerando o modelo espac¸o de estado m´edio x=χ+X, na teoria do controle aplicado ao conversor,x=χ;
G(s)- Func¸˜ao de transferˆencia sem incertezas;
˜
G(s)- Func¸˜ao de transferˆencia com incertezas;
m f a - Sub´ındice do modelo espac¸o de estados m´edio em malha fechada do controle por
Lista de S´ımbolos xx
m f lqi - Sub´ındice do modelo espac¸o de estados m´edio em malha fechada do controle por
xxi
Lista de Acrˆ
onimos e Abreviaturas
LMI -Linear matrix Inequalities- Desiguladades Matriciais Lineares;
CC - Corrente Cont´ınua;
CA - Corrente Alternada;
LQR -Linear Quadratic Regulator- Regulador Linear Quadr´atico;
LQI - Linear Quadratic Regulator with Integral Action - Regulador Linear Quadr´atico
com Ac¸˜ao Integral;
LQG -Linear Quadratic Gaussian- Regulador Linear Quadr´atico Gaussiano;
PDC -Parallel Distribuition Compesation- Compensac¸˜ao Paralela Distribu´ıda;
PWM -Pulse Width Modulation- Modulac¸˜ao por Largura de Pulso;
SVD -Singular Value Decomposition- Decomposic¸˜ao de Valores Singulares;
FTMF - Func¸˜ao de Transferˆencia em Malha Fechada;
MCC - Modo de Conduc¸˜ao Cont´ınua;
GPEC - Grupo de Pesquisa em Energia e Controle;
1
1
Introdu¸c˜
ao
Este cap´ıtulo aborda sobre o estado da arte dos conversoresbooste sobre os trabalhos
en-volvendo LMIs. Al´em disso, ´e feita uma revis˜ao bibliogr´afica sobre os principais trabalhos que
motivaram esta dissertac¸˜ao. S˜ao mostrados os objetivos bem como as contribuic¸˜oes propostas,
al´em do breve resumo dos cap´ıtulos desta dissertac¸˜ao.
1.1
Estado da arte sobre os temas
1.1.1
Estado da arte sobre o conversor
boost
O trabalho de Middlebrook e Cuk (1976), embora n˜ao seja recente, ´e uma referˆencia
rele-vante na modelagem de conversores CC-CC, pois aborda al´em do modelo linearizado no espac¸o
de estados aplicado aos conversoresbuckeboost, apresenta tamb´em a modelagem no espac¸o de
estados em pequenos sinais destes conversores. Esse trabalho ´e base para o modelo no espac¸o
de estados adotado para o projeto de controle do conversorboostdesta dissertac¸˜ao.
O trabalho de Leung et al. (1991, 1993) elabora o projeto de controle ´otimo discreto em
conversores CC-CC, levando em considerac¸˜ao o uso de observadores e an´alise dos zeros e
polos e an´alise no dom´ınio da frequˆencia para o projeto usando o controle LQR.
Mohan (1995) apresenta o n´ıvel de conte´udo semelhante ao apresentado por Erickson
(2001). Contudo, seu livro visa o aspecto computacional e aplicado `a modelagem de
con-versores. Al´em disso, essa referˆencia apresenta a teoria aplicada, levando em considerac¸˜ao os
tipos de modelagens matem´aticas que podem ser utilizadas nos conversores, entre estas
mode-lagens est´a o modo de conduc¸˜ao cont´ınuo. O livro de Mohan (2003) aborda a teoria cl´assica
dos conversores semelhante ao conceito empregado por Erickson (2001).
Gezginet al.(1997) elaboram uma metodologia sistem´atica para o projeto de controle ´otimo
LQR considerando os parˆametros de projeto variantes e a minimizac¸˜ao da potˆencia consumida
pelo conversor. Seu trabalho faz uso de um algoritmo que busca as matrizes de ponderac¸˜ao Q e
R que satisfaz o ´ındice de desempenho e as faixas de tolerˆancias dos parˆametros do dispositivo.
O estudo sobre o conversor boost faz uso pela literatura cl´assica de Rashid (2001). A
1.1 Estado da arte sobre os temas 2
(1995, 2003), Sira-Ram´ırez e Silva-Ortigoza (2006).
Erickson (2001) aborda os fundamentos sobre conversores de potˆencia. Seu livro abrange
os principais tipos de conversores tanto CC-CC como CC-CA ou CA-CC est´aticos. Al´em disso,
´e mostrado o conte´udo de modelagem e controle cl´assico aplicado em conversores em geral.
Casale et al.(2002) elaboram uma metodologia para obtenc¸˜ao dos parˆametros do
contro-lador considerando uma regi˜ao de tolerˆancia factivel com os dispositivos f´ısicos existentes,
como resistores e capacitores para o controlador anal´ogico. Cita-se tamb´em que Garceraet al.
(2002) fazem a an´alise de projeto de controle do conversor CC-CC considerando as incertezas
param´etrica do processo, visando o projeto de um controlador robusto.
Todorovicet al.(2004) fazem uma an´alise dos parˆametros de entrada e de sa´ıda do
conver-sor para o projeto do controlador. Seu trabalho considera uma faixa de variac¸˜ao das tens˜oes de
entrada e de sa´ıda, pois seu conversor ´e projetado para satisfazer as condic¸˜oes de operac¸˜ao de
um painel fotovoltaico.
O livro de Sira-Ram´ırez e Silva-Ortigoza (2006) aborda o conceito de conversores pela
modelagem n˜ao linear e pela modelagem linearizada do conversor. Al´em disso, sua teoria
considera que os parˆametros dos conversores s˜ao variantes. Bryant e Kazimierczuk (2007)
fazem uma an´alise de projeto dos conversores usando o modo de conduc¸˜ao cont´ınua - MCC.
Este conceito ´e abordado tamb´em na literatura da eletrˆonica de potˆencia de Erickson (2001),
Mohan (1995, 2003).
Os trabalhos feitos por Bascop´e e Barbi (2000), Torrico-Bascope et al. (2006a, 2006b,
2006c) fazem an´alise do principio de funcionamento do conversorboostde alto ganho de tens˜ao
com c´elula de comutac¸˜ao de trˆes estados . De Torrico-Bascopeet al.(2006a), foi publicado o
trabalho de Araujoet al.(2010), que trata-se da generalizac¸˜ao do conceitos do conversorboost
de alto ganho com comutac¸˜ao em 3 estados. Este trabalho aborda os conceitos fundamentais
para o projeto f´ısico do conversor de acordo com as especificac¸˜oes exigidas. Arango et al.
(2005) fazem a aplicac¸˜ao do controle LQR em um conversorboostdo tipointerleaved, sendo
ent˜ao uma estrat´egia de controle ´otimo em variac¸˜oes doschopperscl´assicos.
Orellana-Lafuenteet al.(2010), Reiset al.(2011), Reis (2012) aplicam os conceitos de
con-versores de alto ganho de tens˜ao de Torrico-Bascopeet al.(2006a, 2006b), utilizando os
mes-mos parˆametros de projeto, contudo com estrat´egias de controle diferentes. Orellana-Lafuente
et al.(2010) usam dos m´etodos cl´assicos de projeto de conversoresboost, enquanto Reiset al.
(2011), Reis (2012) faz uso do controle LQR com ac¸˜ao integral via resoluc¸˜ao da equac¸˜ao de
Riccati para obter os parˆametros do controlador. O trabalho deste ´e inspirado em Gezginet al.
1.1 Estado da arte sobre os temas 3
1.1.2
Estado da arte sobre as Desigualdades Matriciais Lineares e a teoria
do controle
Os livros de Ogata (1986), Dorf e Bishop (1998), Chen (1999), Ogata (2003), apesar de
fazerem parte da literatura cl´assica da teoria do controle, abordam teorias fundamentais para
os projetos dos controladores. Entre estas teorias est˜ao as topologias de controle por
servo-mecanismo ou modelo interno de controle, que s˜ao topologias que visam anular a ac¸˜ao de
um determinado sinal persistente. Al´em disso, Maciejowski (1989), Shahian e Hassul (1993)
tamb´em s˜ao considerados livros que abordam a teoria cl´assica do controle. Contudo, sua teoria
aborda os conceitos de controle robusto e an´alise das incertezas do processo, assim como Dorf
e Bishop (1998), Skogestad e Postlethwaite (2005).
O artigo de Bernussou et al. (1989) mostra os procedimentos de programac¸˜ao para
pro-blemas envolvendo estabilidade quadr´atica. Trata-se de um trabalho relevante, pois relaciona
os teoremas de Lyapunov e programac¸˜ao linear para resoluc¸˜ao de problemas de estabilidade.
A metodologia de programac¸˜ao empregada neste artigo ´e base para diversos problemas de
otimizac¸˜ao por LMIs. Al´em disso, Peres (2011) possui um conjunto de materiais did´aticos
sobre LMIs baseadas nas principais referˆencias bibliogr´aficas relacionadas ao assunto.
Ghaouiet al.(1992) mostram uma metodologia para soluc¸˜ao do regulador linear quadr´atico
- LQR - utilizando desigualdade de Lyapunov via LMIs. Este trabalho apresenta um algoritmo
de resoluc¸˜ao desta metodologia por meio de programac¸˜ao linear.
Os trabalhos de Boydet al.(1994), Gahinetet al.(1995) s˜ao o marco inicial para o
conhe-cimento sobre as LMIs. O material de Boydet al. (1994) aborda os conceitos fundamentais
de LMIs e seu uso em situac¸˜oes que mostra a necessidade de restric¸˜ao matem´atica. J´a
Gahi-netet al.(1995) mostram os conceitos de LMIs aplicado `a programac¸˜ao semi definida. Al´em
disso, aborda os teoremas de estabilidade Lyapunov, complemento de Schur e a teoria daD
-estabilidade atrav´es doLMI Control Toobox, que ´e uma ferramenta computacional do MATLAB
capaz de resolver problemas via LMIs.
Chilali e Gahinet (1996) apresentam uma nova metodologia de resoluc¸˜ao de problemas
com controleH∞utilizando restric¸˜oes por alocac¸˜ao de polos otimizados via LMIs. A inovac¸˜ao
deste trabalho est´a no emprego de uma metodologia vers´atil de otimizac¸˜ao, pois um conjunto
de restric¸˜oes f´ısicas de projeto no ˆambito da estabilidade pode ser modelado matematicamente
via restric¸˜oes LMIs.
Deve-se citar ainda que Feronet al.(1996), Wang e Burnham (2002) fazem uma an´alise de
estabilidade via LMIs de sistemas modelados por sistemas lineares com parˆametros variantes
-LPVs. Este tipo de an´alise ´e relevante pois permite que sistemas f´ısicos sejam modelados
1.1 Estado da arte sobre os temas 4
tais variac¸˜oes.
Os trabalhos de Trofino (2000), Trofino et al. (2003) constituem uma referˆencia did´atica
sobre LMIs. Suas referˆencias s˜ao compilac¸˜oes resumidas de controle otimizado via
desigual-dades matriciais lineares. Em sua teoria s˜ao abordados controles por alocac¸˜ao de polos, LQR,
H2-H∞, estabilidade e controle via LMIs em sistemas LPV e filtro de Kalman via LMIs. Al´em
disso, seus trabalhos fazem menc¸˜ao ao trabalho de Dullerud e Paganini (2000), que aborda a
resoluc¸˜ao de sistemas LMIs por otimizac¸˜ao convexa.
O trabalho de Souza (2002) trata de uma aplicac¸˜ao sobre LMIs voltada para os aspectos
computacionais. Seu trabalho prop˜oe melhorias de otimizac¸˜ao LMIs em sistemas modelados
no tempo cont´ınuo e discreto, principalmente em sistemas mal condicionados.
Zanchin (2003) faz aplicac¸˜ao do conceito de LMIs em gerac¸˜ao distribu´ıda. Seu trabalho
usa o controleH∞via LMI por sistemas descritores em geradores s´ıncronos ligados a rede.
Johnson e Erkus (2005) aplicam os conceitos de LMIs em um sistema de amortecimento
massa-mola.
O livro de Skogestad e Postlethwaite (2005) tamb´em faz breve estudo sobre LMIs, com
ˆenfase na aplicac¸˜ao em controleH∞. A ferramenta de otimizac¸˜ao abordada nessa bibliografia ´e
oLMI Control Toolboxde Gahinet et al.(1995). Cita-se ainda que sua bibliografia aborda os
conceitos fundamentais de incertezas estruturadas e n˜ao estruturadas.
Al´em disso, o trabalho de Faria (2005) trata o controle por realimentac¸˜ao de estados por
alocac¸˜ao de polos via LMIs, em que Faria () tamb´em possui um tutorial voltado para o p´ublico
leigo no assunto sobre LMIs. Trata-se de um tutorial did´atico que ´e bastante amig´avel para o
aprendizado sobre controle e estabilidade via otimizac¸˜ao por LMIs, pois aborda a teoria
jun-tamente com a aplicac¸˜ao computacional. Este tutorial tamb´em faz uso do MATLAB e das
ferramentas de otimizac¸˜ao SeDuMi e Yalmip , al´em de ensinar a correta instalac¸˜ao destes
oti-mizadores. Cita-se ainda que o mesmo autor possui uma tese utilizando controle por alocac¸˜ao
de polos via LMIs por realimentac¸˜ao derivativa (FARIA, 2009).
O trabalho de Ko et al.(2006) constitui-se numa aplicac¸˜ao do controle LQR via LMIs de
Ghaouiet al.(1992). Esse trabalho aplica os conceitos de controle ´otimo via LMIs num sistema
de aerogeradores de m´aquinas ass´ıncronas de dupla excitac¸˜ao. Al´em disso, Olallaet al.(2009)
aplicam os conceitos de LQR via LMIs em conversores est´aticos CC-CC, sendo uma referˆencia
importante para esta dissertac¸˜ao. Este trabalho inspirou Montagner e Dupont (2010) fazer a
mesma aplicac¸˜ao sendo usado uma busca de parˆametros Q e R por Algoritmos Gen´eticos para
otimizar a resposta no tempo.
Os trabalhos de Filho (2007), Assunc¸˜ao et al. (2007) trata de aplicac¸˜oes voltadas para o
1.2 Revis˜ao bibliogr´afica 5
trabalhos que prop˜oem o conceito de controle por alocac¸˜ao de polos e modificac¸˜ao de zeros via
LMIs.
A dissertac¸˜ao de Gabe (2008) faz uso do controle H∞ em inversores com filtro LCL. Este
trabalho aplica o controle robusto via LMI em conversores de potˆencia semelhante ao trabalho
de Olallaet al.(2009).
O livro de Palhares e Gonc¸alves (2008), possui uma abordagem did´atica e bastante aplicada,
sendo ´util para aplicac¸˜oes na ´area de controle e automac¸˜ao. Tal literatura cont´em teorias LMI
de Boydet al.(1994), Gahinetet al.(1995), Chilali e Gahinet (1996).
O minicurso de Oliveira e Peres (2010) ´e um pequeno tutorial voltado para ensino e aplicac¸˜ao
das LMIs no controle e na estabilidade de sistemas lineares. Ele consiste em aplicac¸˜oes
vol-tadas para o p´ublico leigo no assunto sobre LMIs. Este minicurso faz uso do MATLAB e das
ferramentas de otimizac¸˜ao SeDuMi e Yalmip .
1.2
Revis˜
ao bibliogr´
afica
Middlebrook e Cuk (1976) oferecem uma modelagem alternativa no modelo de espac¸o de
estados m´edio no MCC. Observa-se ainda que as matrizes modeladas no formato ˙x=Ax+Bu, y=Cx+Du assumir˜ao condic¸˜oes incomuns, pois existe D6=0 para o modelo do conversor boost. Esta modelagem n˜ao foi abordada nem por Reiset al.(2011), nem pelos autores Olalla
et al. (2009), Montagner e Dupont (2010), estes por sua vez apresentaram uma modelagem
simplificada e ideal dos conversores. O modelo Middlebrook e Cuk (1976), no entanto, oferece
uma modelagem mais completa, considerando as perdas em todos os componentes do conversor.
A condic¸˜ao D6=0 torna a soluc¸˜ao de uma estrat´egia de controle mais complexa. Para
contornar este problema, muitos autores utilizam modelos linearizados em queD=0. Contudo, considerando as condic¸˜oes que geraramD6=0, deve-se projetar uma estrat´egia de controle que
resolva este problema.
Os trabalhos de Boydet al.(1994), Gahinetet al.(1995), Chilali e Gahinet (1996), Palhares
e Gonc¸alves (2008) mostram teorias que podem ser facilmente aplicadas no controle de
con-versores CC-CC utilizando restric¸˜oes LMIs. Al´em disso, deve-se considerar que para garantir
os conceitos de estabilidade robusta dentro das especificac¸˜oes desejadas, os crit´erios de
robus-tez devem ser satisfeitos de acordo com Maciejowski (1989), Shahian e Hassul (1993), Dorf e
Bishop (1998), Chen (1999), Skogestad e Postlethwaite (2005).
Os trabalhos de Olallaet al.(2009), Montagner e Dupont (2010) mostraram que ´e poss´ıvel
aplicar os conceitos de LMIs como estrat´egias de controle para seus respectivos conversores
CC-CC. Deve-se considerar que, para projeto de conversores, existem limitac¸˜oes de projeto e
1.3 Objetivos e contribuic¸˜oes deste trabalho 6
para o projeto de seus controladores. Contudo, tais autores n˜ao consideraram os efeitos das
incertezas em seus trabalhos. Apenas usaram o conceito de politopos, n˜ao sendo condic¸˜oes
necess´arias e suficientes que atestam que seus sistemas s˜ao robustos.
Cita-se ainda que, apesar da soluc¸˜ao LQR destes autores se mostrarem eficazes em seus
trabalhos, n˜ao foram feitas an´alises mais profundas a respeito dos autovalores encontrados e seu
comportamento na frequˆencia. Isto porque, frequˆencias de canto em malha fechada pr´oximo `a
frequˆencia de chaveamento PWM podem comprometer o desempenho do conversor. Portanto,
apesar de seus trabalhos oferecerem propostas alternativas `as estrat´egias de controle cl´assico, ´e
poss´ıvel desenvolver t´ecnicas mais bem elaboradas que considerem as limitac¸˜oes de projeto e
garantam a robustez do processo.
Reiset al.(2011), Reis (2012) apresentaram uma modelagem alternativa ao modelo cl´assico
aplicado em conversores CC-CC, semelhante `as modelagens de Olallaet al.(2009), Montagner
e Dupont (2010), por´em considerando perdas no capacitor e levando-se em considerac¸˜ao que
o conversor proposto ´e bem mais complexo, porque trata-se de um conversorboost com alto
ganho de tens˜ao e com c´elula de comutac¸˜ao em 3 estados. Portanto exige mais cuidado do
ponto de vista de modelagem e implementac¸˜ao. Seu trabalho faz uso do controle LQR com
ac¸˜ao integral via equac¸˜ao de Riccati. Deste modo, a estrat´egia de controle ´e o controle ´otimo
LQI. O controle ´otimo considera a minimizac¸˜ao do ´ındice de desempenho como parˆametro
sistem´atico para a garantia de uma resposta eficiente para o processo(CHEN, 1999; OGATA,
2003). No entanto, seus parˆametros de carga e tens˜ao de entrada s˜ao vari´aveis e em seu trabalho
considera-se o ponto de operac¸˜ao em plena carga. Esta condic¸˜ao de operac¸˜ao ´e considerada
comum na modelagem de conversores CC-CC (MOHAN, 1995; ERICKSON, 2001; MOHAN,
2003; ARANGOet al., 2005; ORELLANA-LAFUENTEet al., 2010).
1.3
Objetivos e contribui¸c˜
oes deste trabalho
1.3.1
Objetivos deste trabalho
• Aplicar os conceitos de otimizac¸˜ao via LMI com D-estabilidade no conversor boost de
alto ganho de tens˜ao com c´elula de comutac¸˜ao de trˆes estados utilizando as estrat´egias
de controle D-LQI e D-Alocac¸˜ao robusta de acordo com Palhares e Gonc¸alves (2008),
Boyd et al.(1994), Gahinetet al. (1995), Chilali e Gahinet (1996) utilizando o modelo
no espac¸o de estados m´edio(MIDDLEBROOK; CUK, 1976);
• Analisar as incertezas do processo bem como as restric¸˜oes na frequˆencia e estabelecer as
estrat´egias de controle de acordo com tais restric¸˜oes, isso com base nos parˆametros de
1.4 Resumo dos cap´ıtulos 7
• Fazer a an´alise te´orico experimental das estrat´egias de controle aplicadas, levando-se em
considerac¸˜ao a viabilidade do conceito fundamentado na teoria em uma situac¸˜ao real.
1.3.2
Contribuic¸˜oes deste trabalho
Mostrar que os controles robustosD-Alocac¸˜ao de polos eD-LQI otimizados via LMIs s˜ao
estrat´egias de controle v´alidas e eficazes no controle do conversorboostde alto ganho de tens˜ao
com c´elula de comutac¸˜ao de trˆes estados , considerando-se as incertezas nos parˆametros da
tens˜ao de entrada e variac¸˜ao da potencia da carga e a modelagem no espac¸o de estados m´edio
comD6=0. Isto ´e comprovado via simulac¸˜ao e experimentalmente e est´a fundamentado nos
trabalhos citados nesta dissertac¸˜ao, comprovando-se como um controle estavelmente robusto
conforme exigido na literatura.
1.3.3
Publicac¸˜oes em congressos
Vide Costaet al.(2012).
1.4
Resumo dos cap´ıtulos
Al´em da introduc¸˜ao, os resumo dos cap´ıtulos s˜ao:
• Capitulo 2: mostra a teoria de LMI. ´E abordada tamb´em os teoremas de estabilidade de
Lyapunov e o conceito de complemento de Schur, al´em dos conceitos de estabilizac¸˜ao e
malha fechada e incerteza polit´opica. Mostra-se ainda a teoria de minimizac¸˜ao LQR
oti-mizado via LMIs e os conceitos deD-estabilidade e sua aplicac¸˜ao no LQR e na alocac¸˜ao
de polos, desenvolvendo oD-LQR e aD-Alocac¸˜ao de polos.
• Cap´ıtulo 3: neste cap´ıtulo s˜ao abordados os conceitos de conversores cl´assicos e do
con-versor original, ´e mostrado ainda os parˆametros do concon-versor original e a sua reduc¸˜ao do
modelo equivalente. Al´em disso aborda a modelagem no espac¸o de estados e as an´alises
de incertezas do processo.
• Cap´ıtulo 4: Estuda as estrat´egias de controle aplicado ao conversor, mostra a topologia
do servomecanismo com ac¸˜ao integral e a aplicac¸˜ao das estrat´egias de controleD-LQI e
aD-Alocac¸˜ao de p´olos robusto, al´em dos procedimentos de otimizac¸˜ao.
• Cap´ıtulo 5: apresentam os resultados num´ericos das matrizes no espac¸o de estados m´edio
bem como os resultados num´ericos dos ganhos de realimentac¸˜ao de estados. Al´em disso,
mostra os resultados das func¸˜oes de transferˆencia das incertezas, al´em da an´alise dos
1.5 Considerac¸˜oes finais 8
• Cap´ıtulo 6: faz-se a an´alise dos resultados experimentais das estrat´egias de controle
apli-cadas ao conversor conforme as especificac¸˜oes de projeto.
• Cap´ıtulo 7: trata-se as conclus˜oes sobre o estudo do conversor como tamb´em analisa os
efeitos das estrat´egias de controle adotadas sobre a planta com os crit´erios de robustez.
Al´em disso, s˜ao mostradas propostas para trabalhos futuros.
• Apˆendice A: ´e um pequeno tutorial que ensina o uso dos pacotes Yalmip e SeDuMi e s˜ao
tamb´em mostrados os procedimentos de instalac¸˜ao, bem como o uso dos tais pacotes com
exemplos aplicados no MATLAB .
1.5
Considera¸c˜
oes finais
Neste cap´ıtulo ´e mostrado sobre o estado da arte sobre os temas al´em dos trabalho que
motivaram a produc¸˜ao desta dissertac¸˜ao. Com base nos cumprimentos dos objetivos desta
dissertac¸˜ao, os cap´ıtulos seguintes mostrar˜ao as bases te´oricas necess´arias al´em da formulac¸˜ao
das estrat´egias de controle, al´em dos resultados de simulac¸˜ao e resultados experimentais. Todos
estes t´opicos foram brevemente resumidos na Sec¸˜ao 1.4 com o objetivo de orientar o leitor a
9
2
Teoria das Desigualdades Matriciais Lineares
no Controle por Aloca¸c˜
ao de Polos e LQR
Este cap´ıtulo visa mostrar os conceitos iniciais e b´asicos necess´arios para formulac¸˜ao das
LMIs. S˜ao abordados os conceitos de Teorema de Lyapunov no modelo no espac¸o de estados
e a obtenc¸˜ao do ganho de realimentac¸˜ao por meio do tal teorema e a definic¸˜ao de politopos.
Cita-se tamb´em o conceito do LQR otimizado via LMIs, al´em da definic¸˜ao de regi˜oes LMI via
D-estabilidade, que pode ser utilizada tanto na alocac¸˜ao de polos como no LQR. Al´em disso,
s˜ao mostrados os conceitos de incertezas e sua finalidade em relac¸˜ao ao conceito de politopos e
a extrac¸˜ao do modelo das incertezas atrav´es da planta com variac¸˜oes polit´opicas.
2.1
Introdu¸c˜
ao `
as desigualdades matriciais lineares - LMIs
As desigualdades matriciais lineares (LMIs) e t´ecnicas LMI surgiram como poderosas
ferra-mentas de projeto em ´areas que v˜ao desde a engenharia de controle para o sistema `a identificac¸˜ao
e concepc¸˜ao estrutural (GAHINETet al., 1995). Trˆes fatores fazem com que t´ecnicas LMI
se-jam atraentes:
• Uma variedade de especificac¸˜oes de projeto e restric¸˜oes podem ser expressas como LMIs.
• Uma vez formulado em termos de LMIs, um problema pode ser resolvido exatamente
pela eficiˆencia dos algoritmos de otimizac¸˜ao convexa (os “resolvedores LMI”).
• Enquanto a maioria dos problemas com m´ultiplas restric¸˜oes ou objetivos carecem de
an´alise de soluc¸˜oes em termos de equac¸˜oes matriciais, estes muitas vezes permanecem
trat´aveis nos quadros LMIs. Isso faz com que o projeto baseado em LMIs seja uma
alter-nativa valiosa para cl´assicos m´etodos “anal´ıticos”.
A hist´oria das LMIs comec¸a em aproximadamente 1890, quando Lyapunov publicou sua
obra, uma introduc¸˜ao, do que hoje ´e conhecida por teoria de Lyapunov. Ele mostrou que uma
equac¸˜ao diferencial do tipo
dx(t)
2.1 Introduc¸˜ao `as desigualdades matriciais lineares - LMIs 10
´e est´avel se e somente se existir uma matriz P semi definida positiva (isto ´e, P>0) de modo
que
A′P+PA<0.
A condic¸˜ao que Lyapunov desenvolveu ´e denominada de estabilidade de Lyapunov em P, que
´e uma forma especial de LMI. Al´em disso Lyapunov mostrou que dado um ponto de operac¸˜ao
Q=Q′>0, na equac¸˜aoA′P+PA=−Qexiste um P>0 em que a equac¸˜ao diferencial citada ´e est´avel. Logo, a LMI usada pela primeira vez para analisar a estabilidade de um sistema
dinˆamico foi a desigualdade de Lyapunov, que pode ser resolvido analiticamente (BOYDet al.,
1994). Portanto, um resumo dos principais acontecimentos na hist´oria de LMIs na teoria de
controle desde a resoluc¸˜ao da primeira LMI segue-se ent˜ao:
• 1890: Surge a primeira LMI. Uma soluc¸˜ao anal´ıtica por LMI atrav´es da equac¸˜ao de
Lya-punov.
• D´ecada de 1940: Aplicac¸˜ao de m´etodos de Lyapunov para engenharia de problemas de
controle real. Pequenas LMIs resolvidas “`a m˜ao”.
• In´ıcio da d´ecada de 1960: Lema Positivo-Real d´a t´ecnicas gr´aficas para resolver uma
outra fam´ılia de LMIs.
• Final da d´ecada de 1960: A observac¸˜ao de que a mesma fam´ılia de LMIs pode ser
resol-vida atrav´es da resoluc¸˜ao de uma Equac¸˜ao Alg´ebrica de Riccati (Algebric Riccati
Equa-tion- ARE).
• In´ıcio da d´ecada de 1980: Reconhecimento de que muitas LMIs podem ser resolvidas por
computador atrav´es de programac¸˜ao convexa.
• Final da d´ecada de 1980: Desenvolvimento de algoritmos dos pontos interiores para
resoluc¸˜ao de LMIs.
Atualmente, tˆem-se desenvolvido maneiras de resolver uma forma geral de LMIs (BOYD
et al., 1994). Um exemplo de LMI cl´assico ´e a resoluc¸˜ao da equac¸˜ao de Riccati (OGATA, 2003;
DORF; BISHOP, 1998), que ´e utilizada para busca do ganho ´otimo LQR, ´e dada por
A′P+PA+Q−PBR−1B′P<0. (2.1)
Em 1971, J. C. Willems,de (2.1) propˆos a seguinte LMI para (2.1):
"
A′P+PA+Q PB
B′P R
#
2.1 Introduc¸˜ao `as desigualdades matriciais lineares - LMIs 11
A express˜ao (2.2) foi obtida pela autodecomposic¸˜ao da matriz Hamiltoniana (BOYD et al.,
1994), que ´e a composic¸˜ao original da equac¸˜ao de Riccati.
Seja a seguinte equac¸˜ao diferencial do tipo
dx(t)
dt =Aix(t), (2.3)
em que o sub´ındiceiindica v´arios pontos de operac¸˜ao de A ou politopos. Do ponto de vista
f´ısico, isto ´e uma incerteza do tipo param´etrica. Portanto, o teorema de Lyapunov pode ser
generalizado de modo a encontrarP>0 est´avel, sendo que
A′1P+PA1<0, A′2P+PA2<0,
.. .
A′iP+PAi<0, ..
.
A′nP+PAn<0,
(2.4)
em que existemn incertezas, cada incerteza pode ser considerada um ponto de operac¸˜ao,
matematicamente, um politopo. Dado um conjuntonde politopos, existir´a uma soluc¸˜ao fact´ıvel
se e somente se o conjunto politopo for convexo. Na Figura 2.1(a), ´e ilustrada uma regi˜ao a
soluc¸˜aoP>0 encontra-se fora da regi˜ao polit´opica v´alida, portanto esta soluc¸˜ao ´e infact´ıvel. J´a
na Figura 2.1(b), ´e mostrada que a soluc¸˜aoP>0 encontra-se dentro da ragi˜ao polit´opica v´alida,
sendo ent˜ao uma soluc¸˜ao fact´ıvel.
(a) Soluc¸˜ao n˜ao fact´ıvel. (b) Soluc¸˜ao fact´ıvel.
Figura 2.1: Soluc¸˜ao de politopos via LMIs.
No entanto, o conceito de factibilidade ´e bem mais abrangente. O sistema ´e considerado
fact´ıvel, se somente se forem satisfeitas todas as condic¸˜oes de restric¸˜oes impostas(BOYDet al.,
1994; GAHINETet al., 1995). A ilustrac¸˜ao da Figura 2.1 apenas mostra uma pequena aplicac¸˜ao
2.2 Conceitos b´asicos de LMIs 12
2.2
Conceitos b´
asicos de LMIs
Definic¸˜ao 2.1 Uma desigualdade matricial linear (Linear Matrix Inequalities - LMI) ´e descrita
pela seguinte express˜ao (BOYD et al., 1994):
F(x) =x1F1+x2F2+x3F3+. . .+xmFm≥ −F0 (2.5)
ou
F(x) =F0+
m
∑
k=1
xiFi,≥0 (2.6)
sendo x∈Rme F(x) ´e uma func¸˜ao afim, em que Fi∈Rn×m,i=0, ...,m s˜ao matrizes sim´etricas semi-definidas positivas. Umas das suas caracter´ısticas ´e apresentar o formato sim´etrico
em suas matrizes. A restric¸˜ao em (2.6) consiste numa restric¸˜ao convexa, isto ´e, o conjunto
x|F(x)≥0´e convexo.
´
E importante enfatizar que uma LMI pode ser representada de v´arias formas e dificilmente
aparece num problema na forma gen´erica afim (2.6). Por exemplo, dada uma matrizA e uma
matrizQ≥0, a func¸˜ao matricial F(P) =A′P+PA+Q, que aparece em v´arios problemas de estabilidade, ´e afim na vari´avelPe, portanto a desigualdadeF(P)≤0 ´e uma LMI que pode ser facilmente reescrita na forma (2.6), em quex´e o vetor contendo os elementos da matrizPa ser
obtida. A vantagem da representac¸˜ao em (2.6) ´e que toda LMI pode ser reescrita nessa forma
e, portanto, todos os algoritmos de resoluc¸˜ao de LMIs s˜ao desenvolvidos nessa representac¸˜ao.
Existem diversos pacotes de resoluc¸˜ao LMI que podem ser usados para resolver problemas
relacionados `as desigualdades matriciais lineares. Segundo Palhares e Gonc¸alves (2008), os
resolvedores mais conhecidos para problemas que usam de LMI s˜ao:
• LMILAB: instalado no Matlab, ´e uma referˆencia muito conhecida no estudo de LMIs.
Seu m´etodo de resoluc¸˜ao foi desenvolvido por Nesterov e Nemirovski em 1994, tamb´em
disponibilizado em 1994. O manual de resoluc¸˜ao do LMILAB foi escrito por Gahinetet
al.(1995) e ´e uma base bibliogr´afica muito citada em trabalhos com LMIs;
• LMITOOL: disponibilizado no software livre do Scilab, ´e um pacote matem´atico amig´avel,
baseado no m´etodo de resoluc¸˜ao por programac¸˜ao semi definida desenvolvido por
Van-denberghe e Boyd 1996;
• SeDuMi: ´e um pacote de otimizac¸˜ao de matrizes semi definidas desenvolvido por Jos
Sturm. Al´em disso, oSeDuMi ´e de uso bastante amig´avel e vers´atil em diversas
interfa-ces para resoluc¸˜ao matem´aticas de problemas com LMIs, como o YALMIP e o pr´oprio
2.3 Estabilidade de Lyapunov via LMIs 13
• LMISol: ´e um pacote de otimizac¸˜ao desenvolvidos pelos brasileiros Oliveira, Farias e
Geromel em 1997;
• SDPT3: ´e um pacote desenvolvido para problemas de programac¸˜ao cˆonica por K.C. Toh,
R. H. T¨ut¨unc¨u e M. J. Todd.
2.3
Estabilidade de Lyapunov via LMIs
A Estabilidade de Lyapunov na teoria do controle ´e formulada inicialmente no conceito
da equac¸˜ao homogˆenea simples linearizada em um ponto de operac¸˜ao qualquer e uma func¸˜ao
de Lyapunov t´ıpica. Esta func¸˜ao ´e derivada em um ponto de qualquer ou nulo. A busca da
soluc¸˜ao desta func¸˜ao ´e obtida via otimizac¸˜ao LMI. As definic¸˜oes utilizadas seguem as
mode-lagens cl´assicas da teoria do controle (OGATA, 1986; CHEN, 1999; MACIEJOWSKI, 1989;
SKOGESTAD; POSTLETHWAITE, 2005) e da teoria do controle otimizado via LMIs (BOYD
et al., 1994; GAHINETet al., 1995).
Definic¸˜ao 2.2 Considere o seguinte sistema linear invariante no tempo (LTI) modelado no
espac¸o de estados do tipo
˙
x(t) =Ax(t). (2.7)
Definic¸˜ao 2.3 Seja o modelo definido em (2.7) submetido a uma func¸˜ao de Lyapunov do tipo (OGATA, 1986; CHEN, 1999):
V(x) =x′Px>0, (2.8)
conhecida como func¸˜ao de quadr´atica positiva. Em que P>0 ´e hermitiana, real e sim´etrica.
Para encontrar seu ponto de equil´ıbrio,(2.8) ´e derivada de modo que
˙
V(x) =x′ A′P+PAx. (2.9)
Proposic¸˜ao 2.0.1 Para garantir o crit´erio da estabilidade assint´otica para sistemas LTI, ´e
ne-cess´ario que(2.9)seja negativa, portanto
˙
V(x) =x′ A′P+PAx<0⇒A′P+PA<0. (2.10)
Generalizando (2.10) segundo Ogata (1986), Chen (1999), Palhares e Gonc¸alves (2008), vem
˙
V(x) =x′ A′P+PAx<−x′(N)x⇒A′P+PA<−N. (2.11)
Para que (2.11) seja satisfeita para todoAi,i=1,2, ...,mcom base em (2.5), (2.11) torna-se
2.4 Politopos 14
que ´e o crit´erio da estabilidade de Lyapunov descrito para desigualdades.
Teorema 2.1 (Estabilidade de Lyapunov) (OLIVEIRA; PERES, 2010; BOYD et al., 1994;
GAHINET et al., 1995) Dado o sistema do tipox˙=Ax, existe uma soluc¸˜ao P>0 sim´etrica de modo que A′P+PA+N<0,∀x6=0, sendo N>0sim´etrica, uma matriz arbitr´aria forc¸ada ao ponto de operac¸˜ao.
Corol´ario 2.1.1 Do Teorema 2.1, dado o sistema do tipox˙= ∑n
i=1
Aix,n∈N, existe uma soluc¸˜ao
P>0sim´etrica de modo que A′iP+PAi+N <0,∀x6=0, sendo N >0 sim´etrica, uma matriz
arbitr´aria.
Portanto, o processo de otimizac¸˜ao via restric¸˜ao por LMI ´e dado por:
min P=P′tr{P}
su jeito a: P>0
(A′P+PA)<−Q
(2.13) ou min P=P′tr{P}
su jeito a: P>0
(A′iP+PAi)<−Q,i=1,2, ...,m,m ∈N
, (2.14)
em que (2.14) ´e aplicado quando existe um conjunto de matrizes conhecido como politopos.
Este tipo de conhecimento ´e bastante ´util para se determinar a estabilidade de modelos que
cont´em uma faixa de incertezas, definida como incertezas polit´opicas.
2.4
Politopos
Definic¸˜ao 2.4 (GAHINET et al., 1995; PALHARES; GONC¸ ALVES, 2008) Um politopo consiste
num conjunto poliedral limitado e ´e uma casca convexa de um conjunto finito de v´ertices , sendo
que todo elemento no politopo pode ser gerado pela combinac¸˜ao convexa dos seus v´ertices.
Considere um politopo descrito por 5 v´ertices na Figura 2.2, mostrado por Palhares e
Gonc¸alves (2008), em queP=co{v1,v2, ...,v5}(co- casca convexa). Qualquer ponto p∈P
pode ser descrito na forma convexa dos v´erticesp= ∑5
i=1
αivi,αi≥0,
5
∑
i=1
αi=1. A propriedade de convexabilidade ´e suficiente para que possa formular a estabilidade de um sistema incerto
2.5 Complemento de Schur 15
Teorema 2.2 (GAHINET et al., 1995; PALHARES; GONC¸ ALVES, 2008) Dado um sistema
incerto com k v´ertices:
∆[x(t)] =Ax(t),A∈P=∆ (
A|A= k
∑
i=1
αiAi, ,αi≥0, k
∑
i=1
αi=1 )
. (2.15)
O sistema incerto descrito por(2.15)pode ser dito quadraticamente est´avel se, para sistemas
de tempo cont´ınuo, existe uma matriz P=P′>0, tal que A′P+PA<0,∀A∈P ou A′
iP+PAi< 0,∀i=1,2, ...,k,que ´e a demonstrac¸˜ao do processo de otimizac¸˜ao descrito em(2.14).
Figura 2.2: Exemplo de um politopo de 5 v´ertices (PALHARES; GONC¸ ALVES, 2008).
Na teoria do controle, sistemas n˜ao lineares podem ser linearizados em v´arios pontos de
operac¸˜ao. Cada ponto de operac¸˜ao pode ser considerado um politopo, que ´e uma condic¸˜ao de
estabilidade a ser satisfeita. Tais aplicac¸˜oes podem ser vistas em Bernussouet al.(1989), Koet
al.(2006), Rossiet al.(2007), Olallaet al.(2009), Oliveira e Peres (2010), Montagner e Dupont
(2010).
2.5
Complemento de Schur
OComplemento de Schur ´e um artif´ıcio matem´atico frequentemente usado para converter
uma desigualdade convexa em uma LMI ou vice-versa (PALHARES; GONC¸ ALVES, 2008;
BOYDet al., 1994; GAHINETet al., 1995; PERES, 2011; OLIVEIRA; PERES, 2010). Al´em
disso, ocomplemento de Schur ´e ideal para casos em que est˜ao presentes express˜oes matriciais
n˜ao lineares, convertendo-as em LMIs.
Lema 2.1 (Complemento de Schur) (BOYD et al., 1994) Seja a seguinte matriz de blocos
M=
"
A B
C D
#
2.5 Complemento de Schur 16
sendo D uma matriz quadrada n˜ao singular (ou seja, D−16=0). O complemento de Schur de D
em M, denotado por (M/D), ´e definido por:
M=
"
A B
C D
#
=A−BD−1C⇒(M/D) =A−BD−1C. (2.17)
Teorema 2.3 De(2.17), podem ser formuladas as seguintes express˜oes:
(M\A) =D−CA−1B, (2.18)
(M\B) =C−DB−1A, (2.19)
(M\C) =B−AC−1D. (2.20)
Teorema 2.4 (PALHARES; GONC¸ ALVES, 2008) Do Lema 2.1. Para matrizes sim´etricas do
tipo:
M=M′= "
M1 M2
M2′ M3
#
, (2.21)
o complemento de Schur ´e aplicado na seguinte forma:
(M\M1) =M3−M2M1−1M2′, (2.22)
(M\M3) =M1−M2M3−1M2′. (2.23)
As seguintes propriedades aplicadas ao conceito de complemento de Schur em (2.21) de
acordo com Palhares e Gonc¸alves (2008), Oliveira e Peres (2010), Peres (2011) s˜ao:
i. M=M′>0se, somente se M1>0e(M/M1)>0(ou M3>0e(M/M3)>0);
ii. Se M1>0, ent˜ao M=M′≥0, se, somente se(M/M1)≥0(idem para M3e(M/M3)).
Lema 2.2 Outra forma equivalente, usando as propriedades da transformac¸˜ao de congruˆencia conforme Oliveira e Peres (2010) ´e
M=
"
M1 M2
M2′ M3
# ⇔
"
M1−M2M3M2′ 0
0 M3
#
. (2.24)
Isto para o caso da matriz arbitr´aria T definida por
T =
"
I 0
−M2′M1 I
#
, (2.25)
2.6 Estabilizac¸˜ao 17
2.6
Estabiliza¸c˜
ao
Definic¸˜ao 2.5 Dado o sistema no espac¸o de estados do tipo:
˙
x=Ax+Bu (2.26)
e o modelo de realimentac¸˜ao de estados dado por
u=−Kx, (2.27)
substituindo(2.27)em(2.26), tem-se
˙x= (A−BK)x⇒ ˙x=A˜x. (2.28)
Corol´ario 2.4.1 (Estabilidade de Lyapunov Alternativa) Do Teorema 2.1, fazendoP¯=P−1 e multiplicando P−1 `a esquerda e `a direita a express˜ao(2.10), sendo P=P′>0, tem-se
A′P¯−PA¯ <0, (2.29)
logo
AP−PA′<0. (2.30)
Substituindo-se (2.28) em (2.30) tem-se
(A−BK)P+P(A−BK)′<0. (2.31)
FazendoY =KP em (2.31), proposto por Palhares e Gonc¸alves (2008), Gahinetet al.(1995), Boyd et al. (1994), Rossi et al. (2007), Oliveira e Peres (2010), Skogestad e Postlethwaite
(2005), segue-se ent˜ao que
(AP−BY) + (AP−BY)′<0 (2.32)
ou
AP+PA′−BY−Y′B′<0. (2.33)
em queK=Y P−1,Y ∈Rm×neP=P′>0.
2.7
Controle LQR via otimiza¸c˜
ao LMI
Definic¸˜ao 2.6 (Linear Quadratic Regulator- LQR) (OGATA, 2003; DORF; BISHOP, 1998)
2.7 Controle LQR via otimizac¸˜ao LMI 18
de estados baseado na minimizac¸˜ao do ´ındice de desempenho quadr´atico
J= ∞
Z
0
x′Qx+u′Rudt. (2.34)
sendo Q e R s˜ao as matrizes de ponderac¸˜ao tal que Q=Q′≥0e R=R′>0.
O ´ındice de minimizac¸˜ao (2.34) utiliza-se da definic¸˜ao de equac¸˜ao de estados em (2.26). Ghaoui
et al.(1992) estabeleceu a proposic¸˜ao 2.4.1.
Proposic¸˜ao 2.4.1 (GHAOUI et al., 1992) O processo de otimizac¸˜ao
min
P,Z tr(QP) +tr(Z)
su jeito a
AP+PA′−BY−Y′B′+I<0
"
Z R1/2Y
Y′R1/2 P
#
>0,P>0
(2.35)
corresponde ao problema de soluc¸˜ao LQR, se a matriz de ponderac¸˜ao R ´e sim´etrica definida
positiva, o par(A,B)´e control´avel e o par(Q,A) ´e observ´avel.
Com base em Ghaouiet al.(1992), Olallaet al.(2009) segue o Teorema 2.5:
Teorema 2.5 (GHAOUI et al., 1992) A func¸˜ao custo em (2.34) ´e minimizada via LMI, se
min
P,Z tr(QP) +tr(Z) ´e m´ınimo, de modo que Z ´e obtida atrav´es da desigualdade
"
Z R1/2Y
Y′R1/2 P
#
>0,P>0. (2.36)
Prova 2.5.1 Usando-se os conceitos de minimizac¸˜ao do ´ındice de desempenho LQR de(2.34)
e o conceito de realimentac¸˜ao de estados em(2.27), substituindo em(2.34), tem-se
J= ∞
Z
0
x′Qx+xK′RKxdt = ∞
Z
0
x′ Q+K′RKxdt, (2.37)
aplicando o trac¸o da matriz em ambos os lados, e utilizando-se a propriedade da
comutativi-dade do trac¸o da matriz, de acordo com Ghaoui et al. (1992), Olalla et al. (2009), Ko et al.
(2006), segue-se que
tr(J) =tr
Q+K′RK
∞
Z
0 xx′dt
, (2.38)
fazendo P= ∞
R
0
xx′dt e substituindo-o em(2.38), tem-se