UM PROLEMA DE SEQÜENCIAMENTO EM MÁQUINAS
PARALELAS NO-RELACIONADAS COM TEMPOS DE
PREPARAÇO DEPENDENTES DE MÁQUINA E DA
SEQÜÊNCIA: MODELOS E ALGORITMO EXATO
Instituto de Ciênias Exatas
Programa de Pós-Graduação em Ciênia da Computação
UM PROLEMA DE SEQÜENCIAMENTO EM MÁQUINAS
PARALELAS NO-RELACIONADAS COM TEMPOS DE
PREPARAÇO DEPENDENTES DE MÁQUINA E DA
SEQÜÊNCIA: MODELOS E ALGORITMO EXATO
Dissertação apresentada ao Curso de
Pós-GraduaçãoemCiêniadaComputaçãoda
Uni-versidadeFederalde MinasGeraisomo
requi-sitoparialpara aobtençãodograu deMestre
emCiênia da Computação.
PEDROLEITE ROCHA
Um problema de seqüeniamento em máquinas paralelas não-relaionadas, tempos de
pre-paração dependentes de máquina e da seqüênia, datas de entrega e tarefas ponderadas é
onsiderado neste trabalho. Dois modelos de programação inteira e mista baseados em
es-tratégias lássias da literatura são avaliados. Um algoritmo Branh-and-bound (B&B) é
desenvolvidoe a solução enontrada pela metaheurístiaGRASP é utilizada omolimite
su-perior. Tambémpropomosumonjunto deinstâniasparaestetipodeproblema. Resultados
omputaionais são realizados em vários tipos de testes, onde o algoritmo tem umbom
de-sempenho em instânias de até 30 tarefas. Finalmente, onlusões e direções para futuros
A sheduling problem with unrelated parallel mahines, sequene and mahine dependent
setup times, due dates and weighted jobs is onsidered in this work. Two mixed integer
programing (MIP) models based on lassi strategies from the literature are evaluated. A
Branh-and-Bound algorithm (B&B) is developed and a solution provided by the
metaheu-risti GRASP is used as an upper bound. We also propose a set of instanes for this type
of problem. Computational experiments are arried out in several types of tests, where the
algorithm performs well on instanes withup to 30 jobs. Finally,onlusions and diretions
order in a nite, but very large, disrete universe that is intriately intertwined.
And a seond, but not less important hallenge is how to mould what you have
ahievedin solvingtherstproblem,intoateahable disipline: it does notsue
tohoneyourownintellet(thatwilljoinyouinyourgrave),youmustteahothers
how tohonetheirs. The more youonentrate on thesetwo hallenges,the learer
you will see that they are only two sides of the same oin: teahing yourself is
disovering what isteahable.
Agradeço atodosqueontribuíram paraqueeupudessehegaratéaqui. Agradeço
prinipal-menteameus pais,a quem dedioesta dissertação.
À toda minha família, prinipalmente meus avós Antnio, Cota, Di e Dora, meu tio e
padrinhoJoão, meustiosAfrânioeRiardo eminhastias Elisa,Frane,MaríliaeMariaInês,
todosquesempremederamforça. Tambémaminha madrinhaSabrinaea tia Bel,quenão
são dafamília, masé omosefossem.
Ao meu orientador, Robson, ao meu o-orientador, Martín, que é argentino mas é gente
boa,e aosmembrosda bana quevieram prestigiareste trabalho.
Aosgrandes amigos desdea infânia atéhoje: Luizinho,Riardo e Thiago.
Atodososamigos doLaPO, em espeialaDoinho, Dri,Fred,Gurvan,Lu eOlga.
Aos que tiveram que me agüentar morando debaixo do mesmo teto desde a graduação:
Alla, minha irmã Diana,Lama, Manoel, Mauríio, Menotti eRafael.
Aosamigos parasempre: George, Ismaele Zeniel.
AoOverow: Gudee Torres, easOvergirls: Alê, Camila e Lud.
Aosgrandes amigos doGAAL: Ana,Carlos,Cazita, Delboni,Gaspar, Lidia e Luis.
Aosamigos do peito: Bebex, Clara, Fujii,Gripp, Igorele,Juliano, Lilianee Leonardo.
Atodososamigosdo mestradoe doutorado: AraellyePedrão,Bárbara, Bigonhinha, os
earenses César, Ju eOsama, Diego, Fabíola eNaka,Mauríio eIngrid, Raquele Ruiter.
Aoshefesque tivenasempresas onde trabalheiduranteo perurso: Alberto, Ana,Leo e
Zé Carlos.
E a todas as outras pessoas que zeram parte da minha vida de alguma forma ou se
1 Introdução 1
1.1 Sistemade Produção . . . 1
1.2 Problemasde Seqüeniamento . . . 1
1.3 NotaçãoparaProblemas de Seqüeniamento . . . 2
1.4 ProblemaAbordado . . . 6
1.5 Organização . . . 8
2 Formulações Matemátias 9 2.1 ModeloBaseado noTrabalho de Manne . . . 9
2.2 Modelo BaseadonoTrabalho de Wagner . . . 11
3 Algoritmo Branh-and-Bound 15 3.1 Iniializaçãoom GRASP . . . 16
3.2 OProedimento de Branhing . . . 18
3.3 OProedimento de Bounding . . . 20
3.4 Branh-and-Bound Diotmio . . . 24
4 Testes e Resultados 27 4.1 Instânias . . . 28
4.2 Avaliando GRASPomo limitesuperior . . . 29
4.3 Comparandoosmodelos . . . 31
4.4 DiferentesCenários de Máquinas . . . 32
4.5 Variando a Datade Entrega . . . 33
4.6 Variando o Tempo de Proessamento . . . 34
4.7 Variando o Tempo de Preparação . . . 34
4.8 Branh-and-bound Diotmio. . . 36
4.9 Instâniasde Grande Porte . . . 38
5 Conlusões 41
A Instânia Exemplo 43
3.1 Seqüêniadepassosdaonstruçãoomasposiçõesanalisadasparaadatarefaem
destaque . . . 17
3.2 Seqüêniade passosda busaloalom astroasanalisadas emdestaque . . . . 18
3.3 Seqüêniade passosde PRom asposiçõesanalisadas emdestaque . . . 19
3.4 Primeira fasede branhing . . . 19
3.5 Segunda fasede branhing . . . 20
4.1 Número de nósexpandidosvariando onúmero deiteraçõesdoGRASP . . . 30
4.2 Modelosvs. B&B. . . 31
4.3 Número de nósexpandidosvariando oenário de máquinas omo B&B . . . 32
4.4 Soluções enontradas peloGRASP . . . 34
4.5 Número de nósexpandidosvariando adatade entrega omoB&B . . . 35
4.6 Número de nósexpandidosvariando ostemposde proessamento omo B&B . . 36
4.7 Número de nósexpandidosvariando ostemposde preparação om oB&B . . . . 37
4.1 Valorespadrãoparaasinstânias . . . 28
4.2 NúmerodenósexpandidosedesviopadrãovariandonúmerodeiteraçõesdoGRASP 30
4.3 Tempode CPU gastoe variação dosdois modelos e doB&B. . . 31
4.4 Número de nósexpandidos e desvio padrão variando o enário de máquinas om
o B&B. . . 33
4.5 Número de nósexpandidose desviopadrão variando a datadeentrega omo B&B 35
4.6 Número denósexpandidos edesvio padrãovariando ostemposde proessamento
omo B&B . . . 36
4.7 Númerodenósexpandidosedesviopadrãovariandoostemposdepreparaçãoom
o B&B. . . 37
4.8 Número de nósexpandidose desviopadrão variando o fatordiotmiodo B&B 38
3.1 UmBranh-and-Boundgenério . . . 15
3.2 Bloo prinipaldo B&Be algoritmo de iniialização(GRASP) . . . 16
3.3 Pseudo-ódigo paraoPath-relinking implementado . . . 18
3.4 Primeira fasede branhing . . . 20
3.5 Segunda fasede branhing . . . 21
3.6 B&BDiotmio . . . 24
Introdução
1.1 Sistema de Produção
Oplanejamentodaproduçãoévistoomooplanejamentodaaquisiçãodereursosematérias
primas, assimomooplanejamentodasatividadesdeprodução,neessáriasparatransformar
matériaprima emprodutosaabados,atendendoademandadosonsumidoresdaformamais
eientee eonmia possível[Pohete Wosley (2006 )℄.
No ontexto industrial, problemas de seqüeniamento estão relaionados à área de
Ma-nufaturing Resoure Planning (MRP).A programação éfeita de aordoom ohorizontede
planejamento. Deisõesde longoprazotêmaraterístias estratégias,eportanto são
toma-das pela alta administração. O médio prazo é onheido omo nível tátio. Este trabalho
foano urtoprazo,onheido omoníveloperaional, onde oobjetivoé ordenaraseqüênia
de produção om o objetivo de minimizar osustos de fabriação. Neste nível, ademanda e
datas de entrega já estãodenidas.
Neste tipo de problema, oobjetivo prinipal é denir aseqüênia de proessamento para
atender as demandas e datas de entrega. Além disso, os algoritmos desenvolvidos também
prouram minimizar otempo deprodução e o atrasode ada produto.
1.2 Problemas de Seqüeniamento
Oproblemadeseqüeniamentoestáassoiadoàaloaçãodereursosaumonjuntodetarefas
num dado tempo. Esalonar signia designar reursos para a exeução dastarefas até que
todas tenham sido exeutadas sob as restrições impostas om o objetivo de minimizar o
omprimento do seqüeniamento, dado pelo tempo de proessamento das tarefas, ou um
outro ritério estabeleido no ontexto do problema [Bªa»ewizetal. (1996 )℄. Apliações
desse problema podem ser enontradas em diversas situações do mundo real, por exemplo,
no planejamento da produção,no gereniamento de projetose no seqüeniamento de tarefas
pelaunidade entral deproessamento doomputador.
EsseproblematemsidoestudadodesdeoiníiodoséuloXX,omosprimeirostrabalhos
de50,surgiramasprimeiraspubliaçõesomostrabalhosde Johnson(1954 ),Jakson(1955 ,
1956)e Smith (1956 ). Iniialmente, a maioria dostrabalhos relaionava-se oma análise de
problemas om uma únia máquina ou sistemas om máquinas paralelas. Nesses sistemas,
onsidera-se um onjunto de máquinas idêntias em paralelo, sendo que as tarefas podem
ser proessadas em qualquer uma das máquinas. Com o passar do tempo, situações mais
omplexasdeseqüeniamentodemáquinasforaminvestigadas,omoautilizaçãodemáquinas
omveloidades de proessamento diferentes e a utilizaçãode mais de uma máquina paraa
exeuçãodamesma tarefa.
1.3 Notação para Problemas de Seqüeniamento
Na maioria dosproblemas de seqüeniamento, o número de tarefas e onúmero de máquinas
é assumido nito. O número de tarefas é denotado por
n
, e o número de máquinas porm
.Normalmente, o sub-esrito
j
se refere a uma tarefa, e o sub-esritoi
a uma máquina. Seuma tarefa requer um número de passos ou operações de proessamento, então o par
(
i, j
)
serefere ao passo ouoperação de proessamento da tarefa
j
na máquinai
. Essa notação foiretiradado trabalho dePinedo (1995 ). Osdados seguintes sãorelaionadosà tarefa
j
.•
Tempo de proessamento (p
ij
). Op
ij
representa o tempo de proessamento datarefa
j
na máquinai
. O sub-esritoi
pode ser omitido seo tempo de proessamentode
j
não dependerda máquina, ousej
for proessadoapenasemumamáquina.•
Tempo de disponibilidade (r
j
). Éotempo noqualatarefaj
hega aosistema,istoé, omenor tempo paraqueo proessamento datarefa
j
possa omeçar.•
Data de entrega (d
j
). Adata de entregad
j
representa adata de entrega prometidada tarefa
j
. Atrasos na data de entrega podem ser permitidos, mas uma penalidadedeveserinserida. Quandoadatadeentregativerqueserabsolutamenteobedeida,ela
é hamadade deadline.
•
Prioridade ou peso (w
j
). A prioridade ou pesow
j
da tarefaj
basiamente denotaa importânia da tarefa
j
relativa às outras tarefas no sistema. Por exemplo, essaprioridade pode representar ousto dearmazenagem datarefa.
Um problema de seqüeniamento é desrito por um trio
α
|
β
|
γ
. O ampoα
desreveo ambiente de máquinas, e ontém uma únia entrada. O ampo
β
fornee detalhes dasaraterístias de proessamento e restrições e pode ser vazio, onter uma únia entrada
ou onter entradas múltiplas. O ampo
γ
ontém o objetivo que deve ser minimizado enormalmente ontém umaúnia entrada.
Osseguintes sãoexemplosde possíveisambientes demáquinas:
•
Uma máquina (1
). O aso de uma únia máquina é o mais simples de todos os•
Máquinas idêntias (Pm). Existemm
máquinas idêntias em paralelo. A tarefaj
requerumaúniaoperaçãoepodeserproessadaporqualquer umadas
m
máquinasouporqualquerumapertenenteaumsubonjunto. Seatarefa
j
nãopodeserproessadoem qualquer máquina, mas em um subonjunto, digamos o subonjunto
M
j
, então aentrada
M
j
aparee no ampoβ
.•
Máquinas paralelas om veloidades diferentes (Qm). Existemm
máquinas emparaleloomveloidades diferentes. Asmáquinasrealizam otrabalho damesmaforma,
diferindoapenasnaveloidade,queédenotadapor
v
i
paraamáquinai
. Otempop
ij
datarefa
j
namáquinai
éigualap
j
v
i
,assumindoqueelapossaserproessadapelamáquina
i
. Esseambientedemáquinastambéméonheidoomomáquinasuniformes. Setodasas máquinas têm a mesma veloidade,isto é,
v
i
= 1
∀
i
, entãop
ij
=
p
j
e o ambiente setorna idêntio aoanterior.
•
Máquinas não-relaionadas (Rm). Esseambiente éumageneralizaçãodoanterior.Existem
m
máquinasdiferentesemparalelo. Amáquinai
podeproessaratarefaj
omumaveloidade
v
ij
. Otempop
ij
quea tarefaj
gasta namáquinai
é igualap
j
v
ij
. Se as
veloidades das máquinas são independentes da tarefa, isto é,
v
ij
=
v
i
∀{
i, j
}
, então oambiente setornaidêntioao anterior.
•
Flowshop(Fm). Existemm
máquinasemsérie. Cadatarefatemqueserproessadapor ada uma das
m
máquinas. Todas astarefas têm o mesmo roteiro, isto é, devemser proessados primeiro pela máquina
1
, depois pela máquina2
, e assim por diante.Após o término em uma máquina um tarefa entra na la para a próxima máquina.
Normalmente,todasaslasoperamomrstinrstout (FIFO),istoé,umatarefanão
pode passar outrana la. Se FIFOé adotado, o owshop é referidoomo ow shop
om permutação, e oampo
β
deve inluira entradaprmu,queé apresentadaabaixo.•
Flow shop exível (FFs). Umow shopexível éumageneralização dosambientesowshopemáquinas paralelas. Emvez de
m
máquinasemsérie,existems
estágios emsérie om umnúmero de máquinas em paralelo em ada estágio. Cada tarefa deve ser
proessada primeiro no estágio
1
, depois no estágio2
, e assim por diante. Umestágiofuniona omo umbano de máquinas paralelas: emada estágio, uma tarefa
j
requerapenasumamáquinae,normalmente,qualquermáquinapodeproessarqualquertarefa.
Aslas entreosvários estágiostambém operam, emgeral,oma estratégiaFIFO.
•
Open shop (Om). Existemm
máquinas. Cada tarefa tem que ser proessada emada uma das
m
máquinas. No entanto, alguns dos temposde proessamento podemserzero. Não hárestriçõesquantoao roteirodeadatarefapeloambientedemáquinas.
Épossíveldeterminarumroteiroparaadatarefa,etarefasdiferentespodemterroteiros
diferentes.
máquina no máximo umavez e job shops onde uma tarefa pode visitar uma máquina
maisde umavez. Noúltimo, o ampo
β
ontém aentrada rer para reirulação, queé apresentada abaixo.
As restrições espeiadas no ampo
β
podem inluir múltiplas entradas. São algumasdasentradas possíveis:
•
Data de disponibilidade (r
j
). Se estesímboloestiverpresentenoampoβ
,atarefaj
não pode iniiar seu proessamento antes da data de disponibilidader
j
. Ser
j
nãoapareeem
β
,oproessamentodatarefaj
podeomeçaraqualquerhora. Emontrasteom datas de disponibilidade, datas de entrega não são espeiadas neste ampo. O
tipode função objetivo dáindiação suiente seexistemdatas deentrega ounão.
•
Tempos de preparação dependentes da seqüênia (s
jk
). Representa o tempode preparação dependente da seqüênia entre astarefas
j
ek
;s
0k
denota o tempo depreparação paraatarefa
k
seatarefak
éa primeiranaseqüênia es
j0
denotaotempode limpeza após a tarefa
j
se for a última na seqüênia. Se o tempo de preparaçãoentre as tarefas
j
ek
depende da máquina, o sub-esritoi
é inluído, isto é,s
ijk
.Se
s
jk
não aparee no ampoβ
, todos os tempos de preparação são assumidos zeroou independentes da seqüênia, podendo ser simplesmente adiionados aos tempos de
proessamento.
•
Preempções (prmp). Preempções sugerem que não é neessário manter um tarefaem umamáquina atéo término. É possívelinterromper o proessamento de umtarefa
a qualquer hora, e oloar um tarefa diferente na máquina. A quantidade de tempo
de proessamento que uma tarefa interrompida já reebeu não é perdida. Quando
uma tarefa interrompida volta à máquina (ou a outra máquina no aso de máquinas
paralelas), elasópreisadamáquinaparaotempodeproessamentorestante. Quando
preempçõessãopermitidas, prmp é inluídoao ampo
β
.•
Restrições de preedênia (pre). Restrições de preedênia podem apareer emambientes de uma únia máquina ou de máquinas paralelas, determinando que uma
ou maistarefastenham quetersido ompletadas antesqueoutra tarefasejapermitida
omeçar. Existem várias formasespeiais de restriçõesde preedênia. Se ada tarefa
tem nomáximo umasuessora,asrestriçõessãoreferidas omoumaárvoreinterna. Se
ada tarefa tem no máximo uma predeessora, as restrições são referidas omo árvore
externa. Seadatarefatemnomáximoumapredeessoraeumasuessora,asrestrições
são referidasomo orrentes.
•
Quebras (brkdwn). Quebras de máquinas sugerem que máquinas não estão sempredisponíveis. Os períodosemque umamáquina nãoestá disponível sãoassumidosxos
(por exemplo,devidoaturnosoumanutenções). Sehámáquinasidêntiasemparalelo,
•
Restrições de elegibilidade (M
j
). Uma restrição que pode apareer no ampoβ
quando o ambiente de máquinas ontiver
m
máquinas em paralelo (Pm). QuandoM
j
estápresente,nemtodasas
m
máquinassãoapazesdeproessaratarefaj
. OonjuntoM
j
denota o onjunto demáquinas apazes de proessar atarefaj
. Se oampoβ
nãoontém
M
j
,a tarefaj
podeser proessadopor qualquer umadasm
máquinas.•
Permutação (prmu). Umarestrição quepode serapliadanoambientedeowshop,é que as las na entrada de ada máquina operam de aordo om a polítia FIFO.
Isso quer dizer que a ordem (ou permutação) em que as tarefaspassam pela primeira
máquina émantidaatravésdo sistema.
•
Bloqueio (blok). Bloqueioéumfenmenoqueoorreemowshop. Seumowshoptemumbuerlimitadoentreduasmáquinassuessivas,podeserque,quandoumbuer
ar heio, a máquinaanterior nãopossa liberar atarefa terminada. Esse fenmeno se
hamabloqueio: atarefaterminadatemquepermaneernamáquinaanteriorevitando,
ou bloqueando,a máquinade proessaroutros tarefas.
•
Sem espera (nwt). A restrição sem-espera é outro fenmeno que pode oorrer emow shop. Tarefas não podem esperar entre duas máquinas suessivas. Isso quer dizer
queo tempo deiníiodeumatarefapodeseratrasado paragarantirquea tarefapossa
atravessaroowshopsemterqueesperarpornenhumamáquina. Umexemplodeuma
operação é uma linha de fabriação, onde uma determinada peça de metal não pode
esperarpelapróximaetapaporque elaesfriaria.
•
Reirulação (rer). Reirulação pode oorrer em job shop, quando uma tarefapode visitarumamáquina maisde umavez.
Outrasentradas doampo
β
sãoauto-expliativas. Por exemplo,p
j
=
p
india quetodosos tempos de proessamento são iguais, e
d
j
=
d
india que todas as datas de entrega sãoiguais. Como ditoantes, datasde entrega, aoontráriodasdatasdedisponibilidade,não são
normalmente expliitadasno ampo
β
; o tipo da função objetivo nosdá indiação suientese ostarefastêm datade entrega ou não.
O objetivo a ser minimizado é sempre uma função dos tempos de término das tarefas,
que, é laro, dependem do seqüeniamento, ou também pode ser uma função das datas de
entrega. Otempode términodaoperaçãoda tarefa
j
na máquinai
édado porc
ij
. Otempoem que a tarefa
j
sai do sistema (o tempo de término na última máquina onde ele requerproessamento)é denotado por
c
j
. O lateness de umtarefaj
édenido omoL
j
=
c
j
−
d
j
que é um valor positivo quando a tarefa
j
é terminada atrasada e negativo quando éompletada adiantada. Oatraso, outardiness,datarefa
j
é denidaomoAdiferençaentreoatrasoelatenesséqueovalordoatrasonunaénegativo. Apenalidade
unitáriada tarefa
j
é denidaomoU
j
=
(
1
sec
j
> d
j
0
..A seguir,temosalguns exemplosde possíveis funções objetivoa seremminimizadas.
•
Makespan (c
max
). O makespan, denido omomax(
c
1
, . . . , c
n
)
é equivalente aotér-mino da últimatarefa asair dosistema. Ummakespan mínimogeralmenteindia uma
alta utilizaçãodasmáquinas.
•
Lateness máximo (l
max
). Omáximo lateness,l
max
,édenido omomax(
l
1
, . . . , l
n
)
.Mede a piorviolação dasdatas deentrega.
•
Tempo de término total ponderado (P
w
j
·
c
j
). A soma dostempos ponderadosde término das
n
tarefas, utilizando a prioridadew
j
omo fator de ponderação, dáuma indiação do usto total do seqüeniamento. A soma dos tempos de término é
freqüentemente referida na literatura omo tempo de uxo (ow time). O tempo de
término total ponderado éhamado detempo deuxo ponderado.
•
Tempo de término total ponderado desontado (P
(1
−
e
−
rc
j
)
). Essa é uma
função deustomaisgeralqueaanterior,ondeosustossãodesontadosaumataxade
r
,0
< r <
1
,porunidadedetempo. Issoé,seatarefaj
nãoterminaatéotempot
,umustoadiional
w
j
re
−
rt
dt
éadiionadoduranteoperíodo
[
t, d
+
dt
]
. Seatarefaj
terminano tempo
t
, o usto total do período[0
, t
]
éw
j
(1
−
e
−
rt
)
. O valor de
r
geralmente épertode
0
,omo0
,
1
(ou10%
).•
Atraso total ponderado (P
w
j
T
j
). Também é umafunção de usto mais geral queo tempo de términototal ponderado.
•
Número ponderado de tarefas atrasadas (P
w
j
U
j
). O número ponderado detarefas atrasadas, não somente é uma métria de interesse aadêmio, mas também é
um objetivofreqüente na vida real.
1.4 Problema Abordado
Oproblemaonsiderado neste trabalho é umproblema de seqüeniamento em máquinas
pa-ralelasnão-relaionadas omtemposde preparação dependentes demáquina e da seqüênia,
datasde entrega e tarefasponderadas. Este tipo de problemaonsiste emprogramar várias
tarefas para serem proessadas por várias máquinas. Cada tarefa deve ser seqüeniada em
umamáquinaespeía,e aordem em queada máquina iráproessar suastarefasdeve ser
da máquina antes que ela possa proessar a próxima tarefa. Este tempo existe para que a
máquina possaserpreparada paraapróximatarefa(e.g. limpaou re-ongurada)e também
é diferente para ada par de tarefas e ada máquina. Cada tarefa tem também uma data
de entrega e umaprioridade. Emboraa data de entrega possa ser exedida, isso ausa uma
penalidade na função objetivo dependente da prioridade da tarefa. Seguindo a notação de
Pinedo (1995) itada na Seção 1.3, este problema pode ser formalmente denido omo um
Rm
|
s
ijm
|
c
max
+
P
T
i
·
w
i
,onde osigniado de ada membro é:•
Rm
: problemade seqüeniamento omm
máquinas paralelas não-relaionadas,•
s
ijm
: temposde preparação dependentes demáquina eda seqüênia,•
c
max
+
P
T
i
·
w
i
oobjetivo éminimizar o makespan aresidodo atraso ponderado.Optamos por uma abordagem exata para o problema, utilizando modelos baseados em
estratégias lássias da literatura, e desenvolvendo umalgoritmo espeío paraele baseado
em Branh-and-Bound (B&B) e GRASP (Greedy RandomizedAdaptive Searh Proedure).
Algoritmos baseados em B&B e na metaheurístia GRASP não são inomuns ao se lidar
omproblemasde seqüeniamento,assimomoemoutrosproblemassimilares[Roundyetal.
(1999 )℄. Rabadietal. (2004) propõe um B&B para um problema de seqüeniamento om
datas deentregaiguaise umamáquinaomtemposde preparação dependentes daseqüênia
(TPDS).UmaadaptaçãodeGRASP[Resendee Feo(1995)℄éusadaparaenontrarumlimite
superiorparaoproblemaexploradonestadissertação. Tambémpodemseritadosostrabalhos
deFeoetal.(1991 );Dahs etal.(1996 ),ondeapliaçõesdeGRASPparaseqüeniamento em
umamáquinasãomostradas,eResende etal.(2002 ),quemostramumaapliaçãointeressante
da metaheurístia paraproblemasde job-shop.
O estudo de problemas de seqüeniamento om TPDS tem atraído muita atenção nos
últimos anos [Kim e Bobrowski (1994 )℄. Eles também são alguns dos problemas de
seqüen-iamento mais omplexos. Considerando apenas uma máquina e um estágio, o problema é
equivalente ao do aixeiro viajante [Bªa»ewizetal. (1996 )℄. Gareye Johnson (1979 )
mos-traram que minimizar o makespan em duas máquinas idêntias é um problema NP-difíil.
Certamente, umproblemaommáquinas não-relaionadase datasdeentregatambémé
NP-difíil.
Há muitos trabalhosonsiderando máquinas paralelas,mas pouos onsideram máquinas
paralelas e TPDS. Luhetal. (1998 ) apliam uma solução baseada em relaxação
lagrange-ana, programação dinâmia e heurístias para um ow-shop om TPDS. LiueLiao (2000 )
onsideram vários estágios, exibilidade e TPDS. Eles também utilizam relaxação
lagrange-ana em um modelo que onsidera restrições de uxo e máquinas idêntias em ada estágio.
Aero eDelgado (2000 ) utilizamumaheurístia baseadaembusa tabu emumproblemade
ow-shopommáquinas não-relaionadas emada estágio, massem onsiderarTPDS.Meyr
(2000 ) utiliza busa loal ombinada om re-otimização dual para resolver um problema de
traba-Hans-Joahim eJohn (1996 ) exploram umproblema de job-shop sem TPDS utilizando
pro-gramaçãoporrestrições. Koulamase Kyparisis(2004 )onsideraumproblemademinimização
demakespanemmáquinas paralelas uniformes omtemposde disponibilidade.
Na mesma linha, foram publiados vários trabalhos apliando GRASP e B&B ao
pro-blemaaquiestudado [Gómez Ravetti e Mateus(2003 );GómezRavetti etal.(2004a ,b ,2006 );
Rohaetal.(2004 , 2006 )℄. Noentanto,nãofoipossívelenontrartrabalhosdeoutrosautores
onsiderandoumproblema omtantasaraterístias quanto oaqui estudado.
1.5 Organização
Estetrabalho estáorganizado na seguinte seqüênia. No Capítulo 2 é detalhado oproblema
abordadoesãodisutidasasformulaçõesmatemátias utilizadas. OCapítulo3apresenta um
algoritmoBranh-and-Bound, eomoelefoiadaptadopara oproblemaabordado. Ageração
Formulações Matemátias
Dois modelos são apresentados nesta seção para produzir soluções ótimas. O primeiro é
baseado no modelo de Manne (1960) para Job Shop, e já foi previamente proposto por
Gómez Ravetti (2003 ). O segundo é baseado no modelo de Wagner (1959 ), também para
Job Shop. Ambostêm osseguintes dados:
•
N
éo onjunto detarefasque devemser proessadas;•
M
é o onjunto demáquinas;•
i
representa umatarefaespeía;•
m
representa uma máquinaespeía;•
d
i
é adata deentrega datarefai
;•
w
i
éa prioridadeda tarefai
;•
p
im
é otempo deproessamento da tarefai
na máquinam
;•
s
ii
′
m
é otempode preparação da máquinam
ao passar datarefai
paraa tarefai
′
;
•
G
éumvalorinteiro muitograndeque atuaomopenalidade.2.1 Modelo Baseado no Trabalho de Manne
O primeiro modelo de programação inteira mista é baseado no modelo de Manne para Job
Shop. Eletrabalha disretizando a ordemdastarefasnasmáquinas eonta om asseguintes
variáveisde deisão:
•
t
i
: tempode iníiodo proessamento datarefai
;•
α
im
:(
1
se atarefai
éproessadapelamáquinam,
•
β
ii
′
m
:(
1
seastarefasi
ei
′
sãoproessadasna máquina
m
ei
éproessada antes dei
′
,
0
asoontrário;•
ρ
i
: atraso datarefai
;•
Z
: makespan (tempo parao términode todasastarefas).A formulação matemátiado modeloé dada edesrita a seguir:
min
Z
+
X
i
∈
N
(
ρ
i
·
w
i
)
!
(2.1)
X
m
∈
M
α
im
= 1
,
∀
i
(2.2)Z
≥
t
i
+
p
im
−
(1
−
α
im
)
·
G,
∀
i,
∀
m
(2.3)ρ
i
≥
t
i
+
p
im
−
d
i
−
(1
−
α
im
)
·
G,
∀
i,
∀
m
(2.4)t
i
′
≥
t
i
+
p
im
+
s
ii
′
m
−
(1
−
α
im
)
·
G
−
(1
−
α
i
′
m
)
·
G
−
(1
−
β
ii
′
m
)
·
G,
∀
i,
∀
i
′
> i,
∀
m
(2.5)t
i
≥
t
i
′
+
p
i
′
m
+
s
i
′
im
−
(1
−
α
im
)
·
G
−
(1
−
α
i
′
m
)
·
G
−
β
ii
′
m
·
G,
∀
i,
∀
i
′
> i,
∀
m
(2.6)α
im
∈ {
0
,
1
}
,
∀
i,
∀
m
β
ii
′
m
∈ {
0
,
1
}
,
∀
i,
∀
i
′
> i,
∀
m
(2.1) A função objetivo é minimizar o makespan somado ao atraso ponderado. Apesar de
onsiderar dois objetivos (makespan e atraso), ela é onsiderada mono objetivo, pois
apenas soma os valores dos dois objetivos. No aso deste trabalho, preferiu-se essa
abordagem porque elagarante sempreaexistêniade umasoluçãoviável, emontraste
om umaabordagemem queasdatas deentrega nãopoderiamservioladas.
(2.2) Impõeque ada tarefadeve ser proessada por exatamente umamáquina.
(2.3) Calula o makespan. Ele deve ser maior ou igual ao tempo de iníio de ada tarefa
i
adiionado ao tempo deproessamento de
i
namáquinam
ondei
é proessada.(2.4) O iníiodo proessamento da tarefa
i
adiionado ao tempo de proessamento namá-quina
m
ondei
éproessadadevesermenor ouigualàsuadatade entregad
i
aresidade umpossívelatraso
ρ
i
.(2.5) Impõequeoproessamento datarefa
i
′
poderáomeçarsomenteapósoproessamento
datarefa
i
eotempodepreparaçãodei
parai
′
,seambasforemproessadasnamáquina
m
(α
im
=
α
i
′
m
= 1
) ei
′
forproessadaapós
i
na máquinam
(β
ii
′
m
= 1
).(2.6) Impõe o reíproo, que o proessamento da tarefa
i
poderá omeçar somente apóso proessamento da tarefa
i
′
e o tempo de preparação de
i
′
para
i
, se ambas foremproessadasna máquina
m
(α
im
=
α
i
′
m
= 1
) ei
′
nãofor proessadaapós
i
na máquinaOmodeloaindaseriaválido seasrestrições(2.5 )e (2.6 )fossemsubstituídaspelas
Restri-ções(2.5)
∀
i
6
=
i
′
eadiionando
β
ii
′
m
= 1
−
β
i
′
im
,masessanovaformulaçãoexigiriaduasvezeso número devariáveis
β
. Com aformulação atual,β
ii
′
m
existeapenassei < i
′
,diminuindoo
número devariáveis
β
pelametade emantendoo número derestrições.2.2 Modelo Baseado no Trabalho de Wagner
Enquanto o primeiro modelo utiliza
α
para disretizar a aloaçãode tarefasem máquinas,osegundo modelo adiiona maisinformação a essasvariáveis, utilizando-as para disretizar as
posiçõesnaseqüênia de proessamento. Eletem asseguintesvariáveis de deisão:
•
t
(l)
m
: tempo deiníio doproessamento dal
atarefa na máquina
m
;•
α
(l)
im
:(
1
se atarefai
for proessadapelamáquinam
nal
aposição,
0
aso ontrário;•
δ
m
(l)
: tempo depreparação neessárioentre asl
ae
(
l
+ 1)
aposiçõesna máquina
m
;•
ρ
i
: atrasoda tarefai
;•
Z
: makespan.Aformulação matemátiaé dada edesrita abaixo:
min
Z
+
X
i
∈
N
(
ρ
i
·
w
i
)
!
(2.7)
X
m
∈
M
|
N
|
X
l=1
α
(l)
im
= 1
,
∀
i
(2.8)X
i
∈
N
α
(l)
im
≤
1
,
∀
m, l
= 1
, . . . ,
|
N
|
(2.9)X
i
∈
N
α
(l)
im
≤
X
i
∈
N
α
(l
im
−
1)
,
∀
m, l
= 2
, . . . ,
|
N
|
(2.10)Z
≥
t
(l)
m
+
X
i
∈
N
α
(l)
im
·
p
im
,
∀
m, l
= 1
, . . . ,
|
N
|
(2.11)ρ
i
≥
t
(l)
m
+
p
im
−
d
i
−
1
−
α
(l)
im
·
G,
∀
m,
∀
i, l
= 1
, . . . ,
|
N
|
(2.12)t
(1)
m
= 0
,
∀
m
(2.13)δ
(l
m
−
1)
≥
s
ii
′
m
−
2
−
α
(l
im
−
1)
−
α
(l)
i
′
m
·
G,
∀
m,
∀
i,
∀
i
′
6
=
i, l
= 2
, . . . ,
|
N
|
(2.14)t
(l)
m
≥
t
m
(l
−
1)
+
δ
m
(l
−
1)
+
X
i
∈
N
α
(l
im
−
1)
·
p
im
,
∀
m, l
= 2
, . . . ,
|
N
|
(2.15)(2.7) A função objetivo é similar à do primeiro modelo: minimizar o makespan somado ao
atraso ponderado.
(2.8) Cada tarefaé proessadaemexatamente umamáquinaem umaposição.
(2.9) Há nomáximo uma tarefaemada posição deada máquina.
(2.10) Devehaverumatarefanaposição
l
−
1
sehouveroutranaposiçãol
namesmamáquinapara
l
≥
2
.(2.11) Omakespanémaiorouigualaotempodeiníiodoproessamentodastarefasemada
posição emada máquina somadoao tempode proessamento datarefa namáquina.
(2.12) Otempodeiníiodoproessamentodatarefana
l
aposiçãonamáquina
m
adiionadoaotempodeproessamentodatarefadevesermenorouigualàdatadeentregadatarefa
adiionada de umpossívelatraso
ρ
i
.(2.13) Otempodoiníiodoproessamentodetodasastarefasdasprimeirasposiçõeséigual
a zero.
(2.14) O tempo de preparação entre as
(
l
−
1)
ae
l
aposições na máquina
m
é maior ouigual ao tempo de preparação neessárioda tarefa
i
parai
′
namáquina
m
sei
ei
′
são
proessadas por
m
nas(
l
−
1)
ae
l
aposições respetivamente.
(2.15) Otempo de iníiodo proessamento para a tarefa na
l
aposição é maior ou igual ao
tempo de iníio do proessamento da tarefa da posição anterior somado ao tempo de
preparação neessárioentreas
(
l
−
1)
ae
l
aposiçõesdamáquina
m
aluladoem(2.14 ),e o tempo de proessamento da tarefana
(
l
−
1)
aposição.
Ao utilizar um valor inteiro
G
muito grande para transformar o modelo em um modelolinear,asrestriçõesontendoaonstante
G
dãolimitesinferioresfraosdurantearesoluçãoseassoiadasavariáveisinteirasoubinárias,assimomononossomodelo. Issoaonteeporque,
durantearesolução, osolverrelaxaasvariáveisbinárias,permitindoqueelasassumamvalores
nãointeiros. Noprimeiro modelo, nasRestrições(2.3-2.6 ),se
0
< α
im
<
1
,o valorresultanteno lado direito será fortemente negativo, não inueniando o limite inferior da variável do
ladoesquerdo. Assim, olimiteinferior dafunção objetivo tambémserá frao.
No segundo modelo, apenas as Restrições (2.12) e (2.14 ) utilizam
G
, fazendo om queapenas
δ
(l)
m
eρ
i
tenham limitesinferiores fraos. Grande parte do valorda função objetivo édadopelomakespan,queéemgrandepartedadopelotempodeproessamentodeadatarefa.
Como a parte do modelo quealula esses dados
P
α
(l
im
−
1)
·
p
im
não possuia onstante
G
assoiada avariáveis binárias ouinteiras, o limiteinferior nãoé prejudiado.
Valeapena destaarquenestetrabalho onsideramosqueada máquinatemumnúmero
de posições igual ao número de tarefas. Embora o aso em que a solução ótima ontenha
Apesardeo segundomodelo terumnúmero devariáveisbemmaior queoprimeiro, eleé
umaformulaçãomaisforteomumlimiteinferiormaisjustodurantearesolução. Éesperado
que ele sejamais rápido pararesolverproblemas omnúmerosde tarefas maiores, quandoo
tempo deiníio deproessamento (
t
i
out
(l)
Algoritmo Branh-and-Bound
Um Branh-and-Bound (B&B) é uma estratégia espeía de enumeração da árvore de
so-luções. Em um B&B, há três proedimentos prinipais: iniialização, branhing e bounding.
Durante a iniialização, uma rápida heurístia é utilizada para enontrar uma boa solução
iniial que servirádelimitesuperior (
LS
)no iníio doalgoritmo.Branhing divideo problema emsub-problemas menores. Cadasub-problema representa
uma solução parial e é representado por um nó na árvore de soluções. Uma estratégia
de busa deve estar assoiada ao proedimento de branhing para deidir qual nó deve ser
expandido aseguir. Olimite superior ajuda apodar nósda árvore debusa quetiverem um
limiteinferior(
LI
)maiorqueolimitesuperiorenontradoatéomomento (numproblemadeAlgoritmo 3.1: UmBranh-and-Boundgenério
Proedimento:BranhAndBound()
Sol
←
SoluçãoIniial(); 1LS
←
ValorDaSolução(Sol
); 2LI
←
LimiteInferior(); 3Branh(
primeiroN o
); 4retorna
Sol
; 5Proedimento:Branh(
no
) seSoluçãoCompleta(no
) então 6Sol
←
no
; 7LS
←
ValorDaSolução(Sol
); 8se
LS
=
LI
então 9 TerminaProedimento(); 10 m se 11 retorna; 12 m se 13para todo
n
∈
FilhosDe(no
)faça 14seBound(
n
)< LS
então 15Branh(
n
); 16m se 17
minimização).
O proedimento de bounding alula o limite inferior de ada nó para deidir quais nós
devem ser podados e quais devem ser expandidos. A estrutura básia de um
Branh-and-Bound genério é mostrada no Algoritmo 3.1 . Nas seções seguintes, os três proedimentos
sãopersonalizados paraesteproblema de seqüeniamento e desritosemmaiores detalhes.
3.1 Iniialização om GRASP
Durante a iniialização, uma solução iniial ompleta é enontrada para servir de limite
superior. Qualquer nó na árvore de enumeração om um limite inferior maior que o
li-mite superior pode ser podado. Neste trabalho, um algoritmo baseado na metaheurístia
GRASP [Resendee Feo (1995 )℄ é utilizado para enontrar essa primeira solução. GRASP
é uma metaheurístia de multi-iníio para problemas ombinatórios [ResendeeFeo (1995 );
Dahs etal. (1996 )℄, e é omposta por duas fases: a onstrução de uma solução aleatória
viável e uma busa loal. Essas duas fases são repetidas em ada iteração. Uma desrição
estádisponível noalgoritmo3.2 .
Iniialmente,éonstruídoumvetoromastarefasordenadas pelaregradamenordatade
entrega (earliest due date - EDD). Durante a fasede onstrução, o algoritmo re-ordena esse
vetordeforma aleatória,seguindo umafunção deprobabilidade espeía. Neste trabalho,a
funçãoutilizadaé
f
(
x
)
∼
1
x
,ondef
(
x
)
representa aprobabilidade deax
atarefaseresolhida
omopróxima. Aada passodare-ordenação, umanova tarefaéesolhida dalistadetarefas
queainda não fazem parteda nova ordenação. Aprobabilidade de umatarefa espeía ser
esolhidaé proporionala
1
x
,ondex
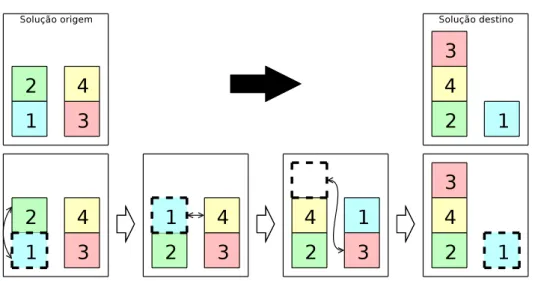
é aposição atualda tarefa nalista.Após a re-ordenação, ada tarefa é aloada a uma máquina apaz de proessá-la. Para
Algoritmo 3.2: Bloo prinipaldo B&Be algoritmo de iniialização(GRASP)
Proedimento:BranhAndBound()
Sol
←
GRASP(iteracoes
); 1Branh1(
1
); 2retorna
Sol
; 3Proedimento:GRASP(
iteracoes
)tars
←
Ordena(N
); 4para
i
←
1
atéiteracoes
faça 5tarsAleatorias
←
ReOrdena(tars
); 6solucaoLocal
←
ConstróiSolução(tarsAleatorias
); 7BusaLoal(
solucaoLocal
); 8PathRelinking(
solucaoLocal
); 9seValorDaSolução(
Sol
)>
ValorDaSolução(solucaoLocal
) então 10Sol
←
solucaoLocal
; 11m se 12
m para 13
isso, umafunção gulosa aloaada uma naordem resultanteà máquinaapazde terminá-la
primeiro. Umexemplo éexibido na Figura3.1.
Abusaloaltroatodososparesdetarefasaloadosamáquinasdiferentes. Seumatroa
melhora o valor da solução, a nova solução é armazenada e a antiga é abandonada. Nada é
feito aso ontrário. Umexemplo é mostrado na Figura 3.2. Foram feitostestes om várias
estratégiasdebusas,tantobusasmaisrestritasomomaisvariadas. Emboraessaestratégia
seja omputaionalmente pesada, ela foi a que enontrou melhores soluções em uma mesma
quantidade detempo.
Path-relinking éumaténiautilizadaomoestratégiadebusaemváriasheurístias[Glover
(1996 , 2000 ); Glovere Laguna (1997 )℄, inluindo emonjunto om GRASP [Laguna eMartí
(1999 )℄. Glovere Kohenberger (2003 ) apresentamduasestratégias prinipais:
•
PR omoumaferramenta paramelhorara solução enontrada peloGRASP.•
PR omoumaestratégia paraintensiar abusaloal.Oalgoritmoesolheduassoluçõeseanalisaoaminhodesoluçõesentreelas. Esseaminho
é feito através de movimentos de tarefas. Para ada movimento, a solução enontrada é
analisada.
Nestetrabalho, PRfuniona omoumaestratégiaparaintensiar abusa loal. Mesmo
assim, há várias formas de se implementar a ténia. GlovereKohenberger (2003 ) itam
algumas:
•
Uso periódiode PR.•
Uso dePR emduasdireçõespossíveis,isto é,da solução 1à solução 2 ede 2a 1.•
Uso dePR emapenas umadireção.•
Uso dePR trunado. Istoé,fazera análisede apenaspartedo aminho.Oalgoritmo de PRdeste trabalho funiona daseguinteforma:
1. O onjunto das ino melhores soluções é mantido (as ino melhores soluções, neste
trabalho).
Figura 3.2: Seqüênia depassosda busaloal omastroasanalisadas em destaque
2. Cada vez que PR é usado, uma solução é esolhida aleatoriamente deste onjunto e
todas as soluções no aminho entre a solução enontrada pela busa loal e a solução
seleionada doonjunto sãoanalisadas.
3. Se umasolução melhor forenontrada, ela éadiionada ao onjunto.
As transformações feitas por PR são detalhadas no Algoritmo 3.3 e um exemplo om 2
máquinase 4 tarefasé mostrado naFigura 3.3.
3.2 O Proedimento de Branhing
Oproedimento debranhing onstróia árvoredeenumeração. Eleé divididoemduasfases.
Naprimeira,astarefassãoaloadasàsmáquinas,masaseqüêniadeproduçãonãoédenida.
Aseqüênia de produção emada máquinaserá deididaapenasna segundafase.
A primeira fasede branhing omeçaordenando astarefasutilizando a regra deEDD. A
funçãoPróximaMáquina(
tar
)retornaasmáquinas seguindoa ordememqueadamáquinaéapazde proessara tarefa
tar
. Cada vez que uma tarefa é aloada, um novo nó na árvoreAlgoritmo 3.3: Pseudo-ódigo paraoPath-relinking implementado
Proedimento:PathRelinking(
solOrig
)solDest
←
SoluçãoAleatória(poolDeM elhoresSolucoes
); 1para
m
←
1
aténumeroDeM aquinas
faça 2para ada posição
l
oupada na máquinam
desolDest
faça 3se
(
solOrig.posicao
[
m
][
l
]
6
=
solDest.posicao
[
m
][
l
])
então 4seexiste uma tarefa em
solOrig.posicao
[
m
][
l
]
então 5Troa astarefas
solOrig.posicao
[
m
][
l
]
omsolDest.posicao
[
m
][
l
]
em 6solOrig
;senão 7
Retira atarefa
solDest.posicao
[
m
][
l
]
daposição emqueela estiverem 8solOrig
e oloa naposiçãol
damáquinam
emsolOrig
;m se 9
m se 10
Figura3.3: Seqüêniade passosdePR omasposiçõesanalisadas emdestaque
de enumeração é riado. Aprimeira faseé desrita no Algoritmo3.4 , e umexemplo de uma
árvorede enumeraçãoparialpara
2
máquinas e6
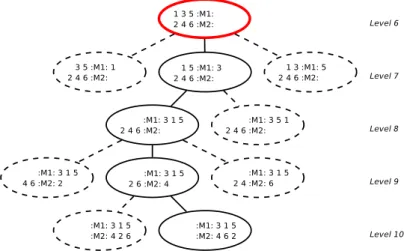
tarefasé dadona Figura3.4 .A segunda fase deide a seqüênia de produção em ada máquina. A ordem é deidida
para uma máquina de ada vez. Em ada máquina, a primeira tarefa a ser proessada é
esolhida, depois a segunda, até que não haja mais tarefas aloadas àquela máquina. A
função PróximaTarefaNaMáquina(
m
) retorna ada tarefa na máquinam
seguindo a regrada EDD. Cada vez que umatarefa éseqüeniada emumaposição de produção espeía na
máquina, um novo nó na árvore de enumeração é riado. Esta fase é desrita no Algoritmo
3.5, e a Figura3.5 mostra o exemplo da árvore de enumeração parial ontinuando o nó em
destaque naFigura 3.4 .
Paraevitar aenumeraçãoompleta daárvorede enumeração, umproedimento de
boun-ding éutilizadoparaenontrarumlimiteinferiorparaadanó. Paraumertonó
i
,seolimiteinferior Bound(
i
) for piorque olimitesuperior, onó é podado. Oproedimento de boundingFigura3.5: Segunda fasede branhing
limitessuperior e inferior.
3.3 O Proedimento de Bounding
Oproedimento de bounding é provavelmente o maisimportante emum branh-and-bound.
Umlimiteinferiorpreisopermiteao algoritmopodarumgrandenúmerodenós, eliminando
muitoproessamento desneessário. Seja:
LI
k
: Olimite inferior do makespan.
LI
t
: Olimiteinferiordo atraso ponderado.
LI
kf
: Olimite inferiordo makespan onsiderandoostemposde todasastarefas.LI
m
ka1
: Olimiteinferiordomakespan onsiderandoumamáquinaespeíaduranteaprimeirafase debranhing.
Algoritmo 3.4: Primeira fasede branhing
Proedimento:Branh1(
i
)seTodasAsTarefasEstãoAloadas() então 1
Branh2(
1
,
1
); 2retorna; 3
m se 4
tar
←
N
[
i
]
; 5para ada
m
←
PróximaMáquina(tar
) faça 6AloaTarefa(
tar, m
); 7seBound(
solucaoAtual
)<
ValorDaSolução(Sol
) então 8Branh1(
i
+ 1
); 9m se 10
N
u
: Oonjunto de tarefasnão-aloadas.
N
m
a
: Oonjunto de tarefasaloadasà máquinam
.S
a
m
: Oonjunto depares de tarefas{
ii
′
}
pertenentes ao onjunto detarefas
N
a
m
.u
: Omenortempode preparaçãoonsiderando todososparesdetarefasemtodasasmáqui-nas.
Oproedimentodeboundingdestetrabalhoébaseadonaestratégiadereduçãodedomínio,
retirada daárea deProgramação por Restrições[Lustig ePuget (2001 )℄.
Neste trabalho, o proedimento de bounding alula separadamente os valores de
LI
k
e
LI
t
emada nó. Paraalular
LI
k
na primeira fase debranhing, o proedimento onsidera
duasformas, utilizando apenasomaiorvalor dentre elas,omo mostraaEquação (3.2).
LI
k
é formalmente denido nasEquações (3.2-3.3 ). Na Equação (3.4),LI
kf
é dado pela
soma dosmenorestemposde proessamento de todasastarefasnão-aloadase ostemposde
proessamento dastarefasaloadas ao menortempode preparação multipliado por
n
,onden
é o número de tempos de preparação neessários para todas as máquinas (neste aso, onúmero de tarefassubtraído do número de máquinas).
LI
ka1
m
é dado pela soma dostemposde proessamento de adatarefa aloada àmáquina
m
aosn
menorestemposdepreparação,onde
n
éomenornúmerodetemposdepreparaçãoneessárioàmáquinam
(ouseja,onúmerode tarefasaloadas a
m
menos um).LI
=
LI
k
+
LI
t
(3.1)LI
k
= max
max
m
∈
M
LI
m
ka
, LI
kf
(3.2)
Algoritmo 3.5: Segunda fasede branhing
Proedimento:Branh2(
i, m
) seSoluçãoEstáCompleta()então 1Sol
←
solucaoAtual
; 2retorna; 3
m se 4
seOrdemEstáDeididaNaMáquina(
m
) então 5Branh2(
1
, m
+ 1
); 6retorna; 7
m se 8
para
tar
←
PróximaTarefaNaMáquina(m
)faça 9AloaTarefaÀPosição(
tar, m, i
); 10seBound(
solucaoAtual
)<
ValorDaSolução(Sol
) então 11Branh2(
i
+ 1
, m
); 12LI
m
ka1
=
X
i
∈
N
a
m
(
p
im
) +
X
{
ii
′
}∈
S
a
m
(
s
ii
′
m
)
(3.3)LI
kf
=
X
i
∈
N
u
min
m
∈
M
(
p
im
) +
X
m
∈
M
X
i
∈
N
a
m
p
im
+
n
·
u
(3.4)|
M
|
Durante a segunda fase de branhing não existem tarefas não-aloadas. Portanto, as
Equações(3.5 -3.6 )sãoutilizadas paraalular
LI
k
. Seja:
LI
m
ka2
: Olimiteinferiordomakespan onsiderandoumamáquinaespeíaduranteasegundafase debranhing.
N
as
m
: Oonjunto de tarefasnamáquinam
seqüeniadasemumaposição espeía.S
as
m
: Oonjunto de temposde preparação usados pelas tarefasemN
as
m
.N
m
au
: Oonjunto detarefasna máquinam
queainda nãoforam seqüeniadas.S
m
au
: O onjunto dosn
menores tempos de preparação entre as tarefas emN
au
m
e a tarefana última posição seqüeniada de
m
, onden
é o número de tempos de preparaçãoneessários para astarefasem
N
au
m
.LI
m
ka2
é dadopelasoma domakespanparial(onsiderandoapenasasposiçõesjáseqüen-iadas) aos tempos de proessamento das tarefas não-seqüeniadas e osmenores tempos de
preparaçãoentreelas. Issoéaluladosomandoostemposdeprodução dastarefasaloadasà
máquina
m
,aostemposde preparação utilizadospelas tarefasjáseqüeniadase aosmenorestempos de preparação das tarefas não aloadas. Isto é feito para ada máquina, e o maior
valor enontradofornee
LI
k
.
LI
k
= max
m
∈
M
LI
m
ka2
(3.5)LI
m
ka2
=
X
i
∈
N
a
m
(
p
im
) +
X
{
ii
′
}∈
S
as
m
(
s
ii
′
m
) +
X
{
ii
′
m
}∈
S
au
m
(
s
ii
′
m
)
(3.6)Olimiteinferiorparaoatraso ponderado (
LI
t
)é aluladode formasimilara
LI
k
. Eleé
dadode aordoom asEquações(3.7-3.12 ). Seja:
LI
tu
: Olimiteinferior do atrasoponderadoonsiderando apenasastarefasnão-aloadas.
LI
m
ta
: O limite inferior do atraso ponderado onsiderando apenas as tarefasaloadas àmá-quina
m
.t
i
: Otempo de iníiodo proessamento da tarefai
noseqüeniamento atual.t
′
i
: Omenor tempo de iníioparaatarefai
omo sei
fossea próximaseqüeniada.LI
ta
m
édadoonsiderandoqueastarefassãoproessadasseguindoumaordemnão-deresentede datade entrega, utilizando o tempo de proessamento omo ritério de desempate, e um
tempo de preparação xoentre ada tarefa. Estetempo de preparação é igual ao menor
en-ontradoentreastarefasnão-seqüeniadasdamáquina
m
,eéutilizadoparaalularotempode iníio
t
′′
i
deaordo omessa seqüênia. Seja:LI
t
=
LI
tu
+
X
m
∈
M
LI
m
ta
(3.7)LI
tu
=
X
i
∈
N
u
w
i
·
max
min
m
∈
M
(
p
im
)
−
d
i
,
0
(3.8)
LI
m
ta
=
LI
m
ta1
+ max
LI
m
ta2
, LI
m
ta3
,
(3.9)onde
LI
ta1
m
representa a penalidade de atraso para as tarefas seqüeniadas et
i
é o tempode iníio do proessamento da tarefa
i
. Olimite inferior para as tarefasnão-seqüeniadas éalulado de duas formas diferentes (
LI
ta2
m
eLI
ta3
m
), e apenas o maior valor é onsiderado.LI
m
ta2
onsideraquetodasastarefaspodemserproessadasna próximaposiçãodisponível,et
′
i
é o menor tempo de iníio paraa tarefai
.LI
ta3
m
onsidera queas tarefassãoproessadasseguindoumaordemnão-deresentededatadeentrega,utilizandootempodeproessamento
omoritério dedesempate, eumtempodepreparação xoentreada tarefa. Estetempode
preparação éigual aomenorenontradoentreastarefasnão-seqüeniadas damáquina
m
,eéutilizado paraalular otempo deiníio
t
′′
i
de aordoomessa seqüênia.LI
m
ta1
=
X
i
∈
N
as
m
[
w
i
·
max (
t
i
+
p
im
−
d
i
,
0)]
(3.10)LI
m
ta2
=
X
i
∈
N
au
m
w
i
·
max
t
′
i
+
p
im
−
d
i
,
0
(3.11)LI
m
ta3
=
min
i
∈
N
au
m
(
w
i
)
·
X
i
∈
N
a
m
max
t
′′
i
+
p
im
−
d
i
,
0
(3.12)É importante destaar algumas diferenças entre estasvariáveis duranteas primeira e
se-gundafasesdebranhing. Naprimeirafase,
t
′
i
ésemprezero,omonãohátarefasseqüeniadasem qualquerposição. Nasegunda fase,
N
u
ésemprevazio, poisada tarefa jáestáaloadaa
alguma máquina. Portanto,
LI
tu
é sempre zero. No entanto, na primeira fase
LI
tu
é maior
que zero apenas quando o menor tempo de proessamento de alguma tarefa for maior que
a suadata de entrega. Pequenas variações no limite inferior de uma solução parial podem
signiar grandes quantidadesde nóspodados. Portanto,essa equação é mantida.
Comosepodepereber, nestetrabalhotodososlimitesinferiorespodemseraluladosde
Algoritmo 3.6: B&BDiotmio
Proedimento:BranhAndBound()
Sol
←
SoluçãoIniial(); 1LI
←
Bound(primeiroN o
); 2LS
←
LI
+ (
ValorDaSolução(Sol
)−
LI
)
·
d
; 3enquantoExisteSoluçãoInteiraEntreLIeLS()faça 4
Branh(
primeiroN o
); 5LI
←
LS
; 6LS
←
LI
+ (
ValorDaSolução(Sol
)−
LI
)
·
d
; 7m enquanto 8
retorna
Sol
; 9Proedimento:Branh(
no
) seSoluçãoCompleta(no
) então 10Sol
←
no
; 11LS
←
LI
+ (
ValorDaSolução(Sol
)−
LI
)
·
d
; 12retorna; 13
m se 14
para todo
n
∈
FilhosDe(no
)faça 15seBound(
n
)< LS
então 16Branh(
n
); 17m se 18
m para todo 19
3.4 Branh-and-Bound Diotmio
Além do B&Bnormal, foi riada umavariação diotmia. Num algoritmo diotmio
lás-sio, ao enontrar uma solução melhor que o limite superior atual, o novo limite superior é
dadopor
LS
=
LI
+
ValorDaMelhorSolução()2
,
em vez de ser dado diretamente pelo valor da nova solução. Ao terminar a busa, o limite
inferioréatualizado omovalordolimitesuperior,olimitesuperioréatualizadoomovalor
dafórmulaaimaparaonovolimiteinferior,eabusaéreiniiadapartindodaúltimasolução
enontrada. Isso érepetido atéque nãoexistammais soluções inteirasentre
LI
eLS
.No diotmio desenvolvido, esse oneito foi estendido. Em vez de o limite superior
sempre ser a média do limite inferior e do valor da melhor solução atual, é utilizado um
parâmetro
d
entre 0 e 1 para identiar à qual distânia o novoLS
está deLI
. O limitesuperioré então dado por
LS
=
LI
+ (
ValorDaMelhorSolução()−
LI
)
·
d.
Limitar abusaaumlimite superiormenorquea melhorsolução enontrada podetrazer
entre
LI
eLS
. Sed
= 0
,
5
, a versão desenvolvida se torna idêntia à lássia, e sed
= 1
,oB&Bdeixadeserdiotmio. UmB&Bdiotmiogenérioestádesritoemmaioresdetalhes
Testes e Resultados
Resultados são apresentados omparando as soluções enontradas pelo B&B desenvolvido
om assoluções enontradas por ambosos modelos quando resolvidos pelo CPLEX 9.0 1
na
seção 4.3. Testes om o B&B resolvendo instânias das várias lasses desritas na seção 4.1
são mostrados nas seções seguintes. As lasses de instânias utilizadas neste trabalho estão
denidas na seção4.1 .
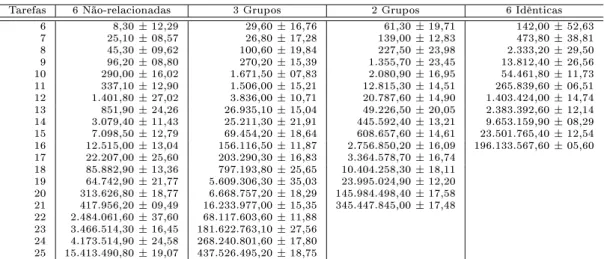
Para apresentação dos resultados dos testes, é utilizada uma média trunada onheida
omointer-quartis[WikimediaFoundation(2005 )℄,quedesarta50%dosvaloresenontrados.
Como há 20 instâniasde ada tamanhoemada lasse, os5 menorese os5maiores valores
enontrados sãodesartados de adaamostra. A médiatrunada nãoé tãosensívelavalores
muito fora da média omo é a média aritmétia, mas utiliza mais informação da amostra.
Além disso,o desviopadrãoéapresentadoemformadeporentagem, aluladopelafórmula
σ
=
100
x
·
v
u
u
t
1
N
·
N
X
i=1
(
x
i
−
x
)
2
%
,
onde
x
i
representa o valor medido para a instâniai
, ex
representa a média aritmétia detodosos
x
i
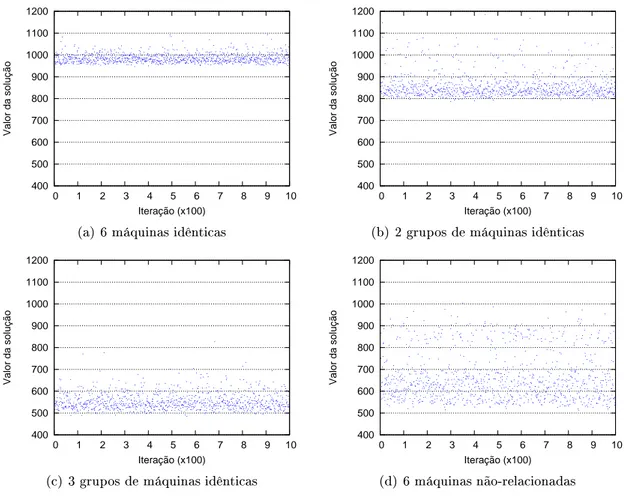
.Durante os testes, busa-se variar o número de tarefas de apenas uma tarefa de uma
instânia para outra. No entanto, um problema om
n
tarefas não é sempre mais fáil deresolverqueumom
n
+ 1
tarefas. Dependendodonúmero demáquinasede omoastarefasestão nelas distribuídas, o último pode ser bem mais fáil de resolver que o primeiro. Nos
gráos apresentados, pode-se veriaralgumas perturbações dessetipo.
O número de iterações do GRASP foi xado em 1.000 para alular o limite superior,
a não ser quando for espeiado o ontrário, e todos os gráos são mostrados em forma
logarítmia. Para ostestes do B&B, o tempo máximo de resolução foi xo em 7200s (duas
horas). Os resultados são apresentados até o número de tarefas em que o B&B onseguiu
resolver, deforma quepelomenos 15 instâniasdeada onjunto de 20 nãoultrapassaram o
1
CPLEXSoftware: UmotimizadorparaproblemaslinearesdesenvolvidopelaILOG.Maisinformaçõesno