Notas para o Curso de C´
alculo Vetorial
Dayse Haime Pastore
Sum´
ario
1 Fun¸c˜oes Vetoriais 5
1.1 Introdu¸c˜ao . . . 5
1.2 Gradiente, Divergente e Rotacional . . . 7
1.3 Exerc´ıcios . . . 10
2 Integrais de Superf´ıcies e Divergˆencia 13 2.1 O vetor normal unit´ario . . . 13
2.2 Defini¸c˜ao de Superf´ıcie Integr´aveis . . . 16
2.3 Calculando integrais de Superf´ıcies . . . 18
2.4 A Divergˆencia . . . 25
2.5 A divergˆencia em coordenadas cil´ındricas e esf´ericas . . . 26
2.6 O Teorema da Divergˆencia . . . 27
2.7 Exerc´ıcios . . . 31
3 Integral de Linha e o Rotacional 35 3.1 Trabalho e Integral de Linha . . . 35
3.2 Integral de Linha Envolvendo Campo Vetorial . . . 37
3.3 O Rotacional . . . 41
3.4 O Rotacional em Coordenadas Cil´ındricas e Esf´ericas . . . 45
3.5 O Teorema de Stokes . . . 48
3.6 Exerc´ıcios . . . 52
Cap´ıtulo 1
Fun¸c˜
oes Vetoriais
1.1
Introdu¸c˜
ao
Um exemplo muito importante de campo vetorial s˜ao os campos el´etricos estudados em eletricidade.
Vamos come¸car revendo o que ´e uma fun¸c˜ao. Uma fun¸c˜ao de uma vari´avel, geralmente escrita como y = f(x), ´e uma regra que associa dois n´umeros x e y, onde x pertence a um dom´ınio ey a um contra-dom´ınio. Exemplo, se y=f(x) =x2−2, ent˜ao calculamos y como sendo a raiz quadrada de xsubtraida de 2. Assim, se x= 3,
y = 32−2 = 7.
Fun¸c˜oes de mais de uma vari´avel podem ser vistas como regras para associar conjuntos de n´umeros. Exemplo, uma fun¸c˜ao de trˆes vari´aveis, w = f(x, y, z) associa um valor a w
referente a x, y e z. Um exemplo no plano cartesiano ´e a fun¸c˜ao, T(x, y, z) que mede a temperatura de uma sala no ponto (x, y, z). Um outro exemplo de fun¸c˜ao vetorial ´e a que associa a um ponto (x, y, z) do espa¸co a velocidade do flu´ıdo.
Defini¸c˜ao 1 Em trˆes dimens˜oes, um fun¸c˜ao ´e dita escalar, ou um campo escalar, se associa um ponto (x, y, z) a um escalar T = f(x, y, z). E ´e dita vetorial, ou um campo vetorial, se associa ao ponto (x, y, z) um vetor w=f(x, y, z).
Assim a fun¸c˜ao que mede a temperatura ´e uma fun¸c˜ao escalar, e a fun¸c˜ao que mede a velocidade de um flu´ıdo ´e uma fun¸c˜ao vetorial.
Em geral, uma fun¸c˜ao vetorialF(x, y, z) especifica amagnitudee adire¸c˜ao de cada ponto em uma regi˜ao do espa¸co.
A figura 1.1 mostra uma fun¸c˜ao vetorial como uma cole¸c˜ao de setas, uma para cada ponto (x, y, z). A dire¸c˜ao de cada seta em qualquer ponto ´e a dire¸c˜ao especifica dada pela fun¸c˜ao vetorial, o seu comprimento ´e proporcional a magnitude da fun¸c˜ao. Uma fun¸c˜ao vetorial pode ser representada atrav´es de suas componentes, como na figura 1.2. Seja i, j e k os vetores unit´arios ao longo dos eixos x, y ez, respectivamente, temos
F(x, y, z) = iFx(x, y, z) +jFy(x, y, z) +kFz(x, y, z).
Figura 1.1: exemplo
Figura 1.2: exemplo
As trˆes quantidades Fx,Fy eFz, todas fun¸c˜oes escalares de x,yez, s˜ao as trˆes componentes
cartesianas1 da fun¸c˜ao vetorial F(x, y, z).
Um exemplo de fun¸c˜ao vetorial (em duas dimens˜oes para simplificar) ´e
F(x, y) = ix+jy,
ilustrada na figura 1.3. Neste exemplo, a posi¸c˜ao dos vetores s˜ao representados pelas setas, vemos que elas est˜ao na posi¸c˜ao radial (isto ´e, na dire¸c˜ao de uma linha passando pela origem) e tem como comprimento sua distˆancia da origem. Um segundo exemplo,
G(x, y) = p−iy+jx
x2+y2
1
1.2. GRADIENTE, DIVERGENTE E ROTACIONAL 7
Figura 1.3: exemplo
´e mostrado na figura 1.4. Verificamos que para essa fun¸c˜ao vetorial todas as setas est˜ao na
Figura 1.4: exemplo
dire¸c˜ao tangente (isto ´e, cada uma ´e tangente a um c´ırculo centrado na origem) e todos tem o mesmo comprimento.
1.2
Gradiente, Divergente e Rotacional
Seja F um campo escalar no espa¸co, se suas derivadas parciais existem ent˜ao elas formam as componentes do vetor gradF, o gradiente da fun¸c˜ao escalar F. Assim,
gradF =∇F =i∂F
∂x +j ∂F
∂y +k ∂F
Exemplo 1
F(x, y, z) = x2y−z2
gradF =∇F =i∂F
∂x +j ∂F
∂y +k ∂F
∂z =i2x y+jx
2
−k2z.
A componente do gradiente em uma dada dire¸c˜ao representa a taxa de varia¸c˜ao de F
nessa dire¸c˜ao.
Propriedades do Gradiente
1. grad (F +G) = gradF + gradG
2. grad (F G) =F gradG+GgradF
3. cgradF =cgradF
Vamos provar a propriedade 2, as demais s˜ao deixadas como exerc´ıcio. Prova:
grad (F G) = i∂F G
∂x +j ∂F G
∂y +k
∂F G ∂z
= i(∂F
∂x G+F ∂G
∂x) +j( ∂F
∂y G+F ∂G
∂y) +k( ∂F
∂z G+F ∂G
∂z)
= (i∂F
∂x +j ∂F
∂y +k ∂F
∂z)G+F (i ∂G
∂x +j ∂G
∂y +k ∂G
∂z )
= GgradF +F gradG
Dado um campo vetorialV no espa¸co. Temos trˆes fun¸c˜oes escalaresVx, Vy e Vz. Se essas
trˆes fun¸c˜oes possu´ırem derivadas parciais primeira, a partir delas, constr´oi-se o escalar divV, a divergˆencia de V, ou o divergente deV
divv =∇ ·V = ∂Vx
∂x + ∂Vy ∂y + ∂Vz ∂z . Exemplo 2
V =ix2−jx y+kx y z
divV =∇ ·V = ∂V
∂x + ∂V
∂y + ∂V
∂z = 2x−x+x y=x+x y.
Na dinˆamica dos flu´ıdos, a divergˆencia surge como uma medida da taxa de diminui¸c˜ao da densidade num ponto. Mais precisamente, seja U = U(x, y, z) o vetor velocidade do movimento de um flu´ıdo e indiquemos por ρ = ρ(x, y, z, t) a densidade. Ent˜ao V = ρ U ´e um vetor cuja a divergˆencia satisfaz `a equa¸c˜ao
divV =−∂ρ
∂t,
1.2. GRADIENTE, DIVERGENTE E ROTACIONAL 9
Propriedades da Divergˆ
encia
1. div (U+V) = divU+ divV
2. div (F V) =F divV + gradF ·V
onde F ´e um campo escalar e V ´e um campo vetorial. Vamos deixar a prova destas propriedade como exerc´ıcio.
O rotacional de um campo vetorial com derivadas parciais primeiras e dado pelo campo vetorial abaixo:
rotV =i
∂Vz ∂y − ∂Vy ∂z +j ∂Vx ∂z − ∂Vz ∂x +k ∂Vy ∂x − ∂Vx ∂y ou ainda,
rotV =∇ ×V =
i j k
∂/∂x ∂/∂y ∂/∂z
Vx Vy Vz
O rotacional ´e importante na an´alise de campos de velocidades na mecˆanica dos flu´ıdos e na an´alise de campos de for¸cas eletromagn´eticos. Podemos interpretar o rotacional como uma medida de movimento angular de um flu´ıdo, e a condi¸c˜ao rotV = 0 para o campo de velocidades V caracteriza os chamados fluxos irrotacionais.
Propriedades do Rotacional
1. rot (U +V) = rotU+ rotV
2. rot (F V) = FrotV + gradF ×V
onde F ´e um campo escalar e V ´e um campo vetorial. Vamos deixar a prova destas propriedade como exerc´ıcio.
Combina¸c˜
oes de Opera¸c˜
oes
Quando se examinam as combina¸c˜oes poss´ıveis entre rot, div e grad chega-se a uma longa lista de identidades. Algumas da quais vamos considerar.
Rotacional de um gradiente
rot gradF = 0
∇ ×(∇F) = 0 Divergˆencia de um rotacional
div rotV = 0
∇ ·(∇ ×V) = 0 Divergˆencia de um gradiente
div gradF = ∂ 2F
∂x2 +
∂2F
∂y2 +
∂2F
Uma fun¸c˜ao F (que tem derivadas parciais segunda cont´ınuas) tal que div gradF = 0 ´e chamada harmˆonica. A equa¸c˜ao
∂2F
∂x2 +
∂2F
∂y2 +
∂2F
∂z2 = 0,
satisfeita por F, ´e chamada equa¸c˜ao de Laplace. Rotacional de um rotacional
rot rotU = grad divU −(i∇2Ux+j∇2Uy+k∇2Uz)
Se definirmos o Laplaciano de um vetor U como sendo o vetor,
∇2U =i∇2Ux+j∇2Uy+k∇2Uz
ent˜ao
rot rotU = grad divU − ∇2U
e dessa forma,
grad divU = rot rotU +∇2U
1.3
Exerc´ıcios
1. Esbou¸car os seguintes campos vetoriais:
a) iy+jx; b) (i+j)/sqrt2;
c) ix−jy; d) iy;
e) jx;
f) i(x2−y2)2+j2xy; g) i(x−y) +j(x+y); h) −iy+jx+k.
2. Esbou¸car as curvas ou superf´ıcie de n´ıvel:
a) f =xy;
b) f =x2+y2−z2.
3. Determinar gradfpara os campos escalares do exerc´ıcio anterior e tra¸car alguns vetores correspondentes.
1.3. EXERC´ICIOS 11
5. Dado o campo vetorial v = 2xi +yj − 3zk,verificar que divv = 0. Achar todos os vetores u tais que rotu = v.[Sugest˜ao: Observar inicialmente que, em virtude de div(f u) = fdivu+ gradf ·u, todas as solu¸c˜oes da equa¸c˜ao rotu = v s˜ao dadas por
Cap´ıtulo 2
Integrais de Superf´ıcies e Divergˆ
encia
2.1
O vetor normal unit´
ario
A palavra normal nesse contexto deve ser linda como, perpendicular. Assim, um vetor n
normal ao planoxy ´e um vetor paralelo ao planoz (figura 2.1). Enquanto um vetor normal
Figura 2.1: exemplo
`a esfera est´a na dire¸c˜ao radial (figura 2.2). A defini¸c˜ao precisa de um vetor normal a uma
Figura 2.2: exemplo
superf´ıcie, como mostra a figura 2.3. Considere uma superf´ıcie arbitr´aria S construa dois vetores n˜ao colineares u e v tangentes a S passando por um ponto p. Um vetor n que ´e perpendicular ao mesmo tempo aos vetores u e v por defini¸c˜ao ´e normal `a superf´ıcie S
no ponto p. Agora, sabemos que o vetor que resulta do produto vetorial entre u e v ´e perpendicular a ambos. Assim podemos escrever n=u×v. Para tornar esse vetorunit´ario
Figura 2.3: exemplo
(isto ´e, ter comprimento igual a 1) ´e muito simples: basta dividi-lo por seu comprimento. Dessa forma,
n= u×v
|u×v|
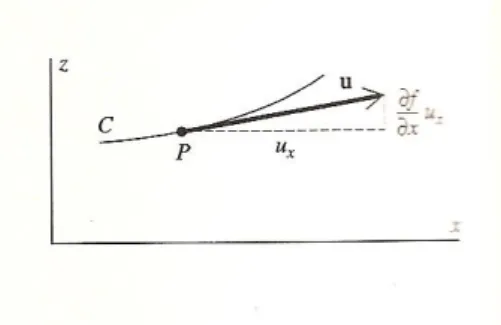
´e umvetor normal unit´ario`a superf´ıcieS no pontoP. Vamos encontrar uma express˜ao para n. Considere a superf´ıcieSdada pela equa¸c˜aoz =f(x, y), figura 2.4. Assim, como sugerimos antes, vamos come¸car encontrando dois vetoresv eu. Para isso construa um plano paralelo
Figura 2.4: exemplo
ao plano-xy passando por P em S, como na figura 2.4. Este plano intersecta a superf´ıcie S
em uma curva C. Constru´ımos o vetor u tangente aC em P que tenha a componente x de comprimento arbitr´ario. A componente z deu ´e (∂f /∂x)ux; nesta express˜ao usamos o fato
da inclina¸c˜ao de user a mesma, por constru¸c˜ao da superf´ıcie S na dire¸c˜ao x, ver figura 2.5. Assim
2.1. O VETOR NORMAL UNIT ´ARIO 15
u=iux+k
∂f ∂x
ux =
i+k
∂f ∂x
ux
Para encontrar o vetorv, passaremos um outro plano no pontoP emS, por´em neste caso o plano ser´a paralelo ao plano-yz (figura 2.6) Este intersecta S em uma curva C′, e o vetor
Figura 2.6: exemplo
v ser´a constru´ıdo tangente a curva C′ em P com componente y de comprimento arbitr´ario
vy. Temos
v=juy +k
∂f ∂y
uy =
j+k
∂f ∂y
uy.
Vamos calcular agora o produto vetorial entre u e v. O resultado,
u×v=
−i
∂f ∂x
−j
∂f ∂y
+k
uxvy
´e um vetor que ´e normal a superf´ıcieS no pontoP, se dividirmos ele por sua norma teremos:
n= u×v
|u×v| =
−i ∂f∂x
−j∂f∂y+k
r
1 + ∂f∂x2
+∂f∂y2
. (2.1)
Este ´e o vetor normal unit´ario a uma superf´ıcie z =f(x, y) no ponto (x, y, z) da superf´ıcie. Note que esse vetor independe do valor das quantidadesux e vy.
Exemplo 3
Um primeiro exemplo trivial ´e: Qual o vetor normal unit´ario ao plano-xy? Claro que a resposta ´e k. Vejamos como variamos usando a equa¸c˜ao 2.1. A equa¸c˜ao do plano-xy´e:
z =f(x, y) = 0,
Obviamente,
∂f /∂x= 0 e ∂f /∂y = 0.
Substitu´ındo na equa¸c˜ao 2.1 temos n=k/√1 =k.
Um segundo exemplo, considere a esfera de raio 1 centrada na origem, figura 2.2, A semi-esfera superior ´e dada por
Assim,
∂f ∂x =−
x
z e
∂f ∂y =−
y z
Usando a equa¸c˜ao 2.1
n= i
x z +j
y z +k
q
x2
z2 +
y2
z2 + 1
= pix+jy+kz
x2+y2+z2 =ix+jy+kz,
Como estamos usando a esfera unit´aria temos quex2+y2+z2 = 1. Assim, como j´a tinhamos afirmado,n´e um vetor na dire¸c˜ao radial com norma 1. Observe quen·n=x2+y2+z2 = 1. Agora que temos os vetores normais a nossa disposi¸c˜ao podemos passar para a pr´oxima quest˜ao, superf´ıcies integrais.
2.2
Defini¸c˜
ao de Superf´ıcie Integr´
aveis
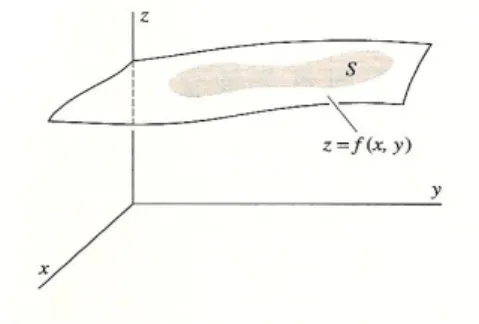
Sejaz =f(x, y) a equa¸c˜ao de uma superf´ıcie. Cosidere uma parcela limitada dessa superf´ıcie. que chamaremos deS (ver figura 2.7) Nosso primeiro passo na formula¸c˜ao da defini¸c˜ao dessa
Figura 2.7: exemplo
integral de superf´ıcie ´e aproximar S por um poliedro que consisti de N faces planas cada uma tangente a S em um ponto. A figura 2.8 mostra essa aproxima¸c˜ao polinomial para um octante da esfera. Concentre sua aten¸c˜ao em uma de suas faces planas, digamos a l
-Figura 2.8: exemplo
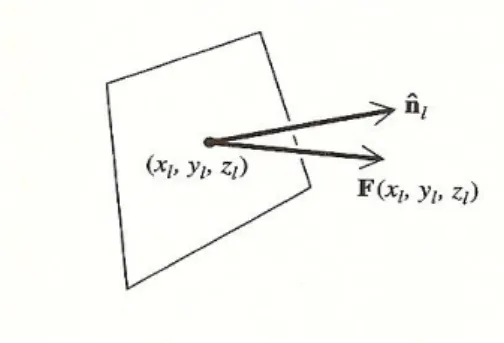
´esima face (figura 2.9). Denote a ´area dessa face por ∆Sl e seja (xl, yl, zl) as coordenadas do
2.2. DEFINIC¸ ˜AO DE SUPERF´ICIE INTEGR ´AVEIS 17
Figura 2.9: exemplo
produto com nl, o vetor normal unit´ario para al-´esima face. O resultado,F(xl, yl, zl)·nl, ´e
multiplicado pela ´area ∆Sl da face, temos
F(xl, yl, zl)·nl∆Sl
Repita esse processo para todas as N faces da aproxima¸c˜ao polinomial. Ent˜ao fa¸ca a soma de todas asN faces.
N
X
l=1
F(xl, yl, zl)·nl∆Sl.
A superf´ıcie integral
Z Z
S
F·ndS ´e definida como o limite desta soma no n´umero de faces,
N, quando o n´umero de faces se aproxima de infinito a ´area de cada uma dessas faces se aproxima de zero. Assim,
Z Z
S
F·ndS = lim
N→∞
cada ∆Sl→0
N
X
l=1
F(xl, yl, zl)·nl∆Sl.
Muitas vezes encontramos integrais de superf´ıcies que s˜ao um pouco mais simples. Essas integrais s˜ao da forma
Z Z
S
G(x, y, z)dS,
onde o integrando G(x, y, z) ´e uma fun¸c˜ao escalar.
Agora aproximamosSnovamente por um poliedro, formamos os produtosG(xl, yl, zl)∆Sl,
somamos todas as faces, e ent˜ao passamos o limite:
Z Z
S
G(x, y, z)dS= lim
N→∞
cada ∆Sl→0
N
X
l=1
G(xl, yl, zl)·∆Sl.
Um exemplo de integral de superf´ıcie simples ´e
Z Z
S
dS.
2.3
Calculando integrais de Superf´ıcies
Agora que j´a definimos a integral de uma superf´ıcie, vamos desenvolver m´etodos para calcula-las Por simplicidade come¸caremos calculando integrais de superf´ıcie onde o integrando ´e uma fun¸c˜ao escalar. Para calcular a integral
Z Z
S
G(x, y, z)dS
considere a parte S da superf´ıcie z = f(x, y) (figura 2.10) Nossa estrat´egia ser´a relacionar
Figura 2.10: exemplo
∆Slcom a ´area ∆Rlda sua proje¸c˜ao no plano-xy, como mostra a figura 2.11 Relacionar ∆Sla
Figura 2.11: exemplo
∆Rl n˜ao ´e dif´ıcil, se lembramos que (como na ´area de superf´ıcies planas) pode-se aproximar
com qualquer grau de exatid˜ao desejado por um grupo de retˆangulos, como mostrado na figura 2.12. Por essa raz˜ao s´o iremos encontrar a rela¸c˜ao entre a ´area de um retˆangulo e sua proje¸c˜ao no plano-xy. Assim, considere um retˆangulo orientado de forma que dois dos seus lados seja paralelos ao plano-xy(figura 2.13). Se chamarmos o comprimento desses lado dea, claramente o comprimento das suas proje¸c˜oes no plano-xy´ea. Por´em o outro par de lados, de comprimento b, tem proje¸c˜oes de comprimentob′, e em geralb eb′ n˜ao s˜ao iguais. Assim
para relacionarmos a ´area do triˆangulo ab coma ´area de sua proje¸c˜ao ab′, basta expressar b
em termos de b′. Isto ´e f´acil de fazer, se considerarmos o ˆanguloθ mostrado na figura 2.13,
temos que b= cosb′θ, e assim
2.3. CALCULANDO INTEGRAIS DE SUPERF´ICIES 19
Figura 2.12: exemplo
Figura 2.13: exemplo
Se n denota o vetor normal unit´ario para o retˆangulo, ent˜ao temos que cosθ = n·k, onde k´e sempre o vetor normal unit´ario que representa a dire¸c˜ao positiva z. Dessa forma,
ab= ab
′
n·k.
Assim cada ´areaδSl pode ser aproximada por esses retˆangulos, isto ´e,
δSl =
δRl
nl·k ,
onde o vetornl ´e o normal unit´ario a l-´esima face da superf´ıcie.
Assim a defini¸c˜ao de integral de superf´ıcie fica
Z Z
S
G(x, y, z)dS = lim
N→∞
cada ∆Rl→0
N
X
l=1
G(xl, yl, zl)
∆Rl
n·k,
onde substitu´ımos o ‘cada ∆Sl’ por ‘cada ∆Rl’ muito mais apropriado e conveniente.
Escre-veremos a integral da superf´ıcieS como uma integral sobre R. De fato,
lim
N→∞
cada ∆Rl→0
N
X
l=1
G(xl, yl, zl)
∆Rl
n·k =
Z Z
R
G(x, y, z)
n(x, y, z)·kdxdy,
vari´avel z em fun¸c˜ao de x e y. Por esse motivo teremos que olhar para a representa¸c˜ao da superf´ıcie z =f(x, y). E assim, tiramos a dependˆencia de z da integral anterior,
Z Z
R
G[x, y, f(x, y)]
n[x, y, f(x, y)]·kdxdy,
Nessa express˜ao a ´unica dificuldade que nos resta ´e calcular n(x, y, f(x, y))·k , para isso basta lembramos da express˜ao 2.1 para o vetor normal unit´ario de uma superf´ıcie. Dessa forma, encontramos,
n(x, y, f(x, y))·k= r 1
1 + ∂f∂x2
+∂f∂y2
que nos leva a express˜ao:
Z Z
S
G(x, y, z)dS =
Z Z
R
G[x, y, f(x, y)]·
s
1 +
∂f ∂x
2
+
∂f ∂y
2
dxdy.
Note que essa ´ultima integral est´a definida em uma regi˜ao do plano-xy, e s´o cont´em express˜oes facilmente calcul´aveis.
Exemplo 4
Calcule a integral de superf´ıcie
Z Z
S
(x+z)dS
onde S ´e a parte do plano x+y+z = 1 que pertence ao primeiro octante, ver figura 2.14
Figura 2.14: exemplo
A proje¸c˜ao de S no plano-xy ´e o triˆangulo R mostrada na figura. A equa¸c˜ao de S pode ser escrita como:
z =f(x, y) = 1−x−y
o que nos d´a,
∂f ∂x =
∂f
∂y =−1 e
s
1 +
∂f ∂x
2
+
∂f ∂y
2
2.3. CALCULANDO INTEGRAIS DE SUPERF´ICIES 21
Assim,
Z Z
S
(x+z)dS =√3
Z Z
R
(x+z)dxdy=√3
Z Z
R
(x+ 1−x−y)dxdy =√3
Z Z
R
(1−y)dxdy,
onde usamos que z = 1−x−y.
√
3
Z Z
R
(1−y)dxdy =√3
Z 1
0
Z 1−y
0
(1−y)dxdy=√3
Z 1
0
(1−y)x|1−y
0 dy=
√
3
Z 1
0
(1−y)2dy=√3(y−1) 3 3 | 1 0 = 1 √ 3 Exemplo 5
Calcule a integral de superf´ıcie
Z Z
S
z2dS
onde S ´e a parte da esfera de raio 1 que pertence ao primeiro octante, ver figura 2.15 A
Figura 2.15: exemplo
proje¸c˜ao deS no plano-xy´e o quarto de circuloRmostrada na figura. A equa¸c˜ao de S pode ser escrita como x2+y2+z2 = 1 ou
z =f(x, y) =p1−x2−y2.
Assim temos que:
∂f ∂x =−
x
z e
∂f ∂z =−
y z, assim, s 1 + ∂f ∂x 2 + ∂f ∂y 2 = s 1 + x2 z2 2 + y2 z2 2 = 1 z p
x2+y2+z2 = 1
z,
onde usamos que, em v´arios passos, x2+y2 +z2 = 1. Assim,
Z Z
S
z2dS =
Z Z
R
z21
zdxdy =
Z Z R zdxdy = Z Z R p
Para resolver essa equa¸c˜ao usaremos coordenadas polares x=rcosθ ey =rsenθ,
Z Z
R
p
1−x2−y2dxdy =
Z π2
0
Z 1
0
r√1−r2drdθ=
Z π2
0 − 1 3(1−r
2)3 2|1
0dθ =
Z π2
0 1 3dθ =
π
6.
At´e o momento, tratamos de superf´ıcieSdescritas pela formaz =f(x, y). Nessa situa¸c˜ao ´e conveniente resolver a integral sobre o plano-xy. Agora se a superf´ıcie ´e convenientemente escrita na formay=g(x, z) como mostra a figura 2.16. Analogamente ao feito anteriormente
Figura 2.16: exemplo
chegamos a integral de superf´ıcie:
Z Z
S
G(x, y, z)dS =
Z Z
R
G[x, g(x, y), z]·
s
1 +
∂g ∂x
2
+
∂g ∂z
2
dxdz.
onde R ´e uma regi˜ao do plano-xz.
Similarmente, se temos uma superf´ıcie descrita na forma x=h(y, z) como na figura 2.17 usamos
Figura 2.17: exemplo
Z Z
S
G(x, y, z)dS =
Z Z
R
G[h(y, z), y, z]·
s
1 +
∂h ∂y
2
+
∂h ∂z
2
dydz,
onde agora R ´e uma regi˜ao do plano-yz.
2.3. CALCULANDO INTEGRAIS DE SUPERF´ICIES 23
Vamos voltar ao nosso problema inicial, que era calcular o valor da integral de superf´ıcie sobre um campo vetorial,
Z Z
S
F·ndS,
onde trocamos o campo escalar G(x, y, z) porF·n . Pelo que j´a feito at´e agora,
Z Z
S
F·ndS =
Z Z
R
F·n
s
1 +
∂f ∂x
2
+
∂f ∂z
2
dxdy.
Novamente usando a express˜ao 2.1 para o vetor normal unit´ario n e que F = (Fx, Fy, Fz),
temos que
F·n= −Fx[x, y, f(x, y)]
∂f
∂x−Fy[x, y, f(x, y)] ∂f
∂y +Fz[x, y, f(x, y)]
q
1 + ∂f∂x2
+ ∂f∂z2
Z Z
S
F·ndS =
Z Z
R
−Fx[x, y, f(x, y)]
∂f
∂x −Fy[x, y, f(x, y)] ∂f
∂y +Fz[x, y, f(x, y)]
dxdy.
Onde lembramos que podemos fazer formulas an´alogas para superf´ıcies dadas pory=g(x, z) e x=h(y, z).
Exemplo 6
Calcule a integral RR
SF·ndS, ondeF(x, y, z) =iz−jy+kx e S ´e a parte do plano,
x+ 2y+ 2z = 2
limitado pelas coordenadas planas, isto ´e, o triˆangulo inclinado que mostra a figura 2.18. Assim temos,
Figura 2.18: exemplo
z =f(x, y) = 1−x 2 −y,
∂f ∂x =−
1 2 e
∂f
∂y =−1.
Que nos d´a,
Fx =z= 1−
x
Substituindo na ultima formula temos:
Z Z
S
F·ndS =
Z Z
R
h
−1−x 2 −y
i
(−1
2) +y(−1) +x
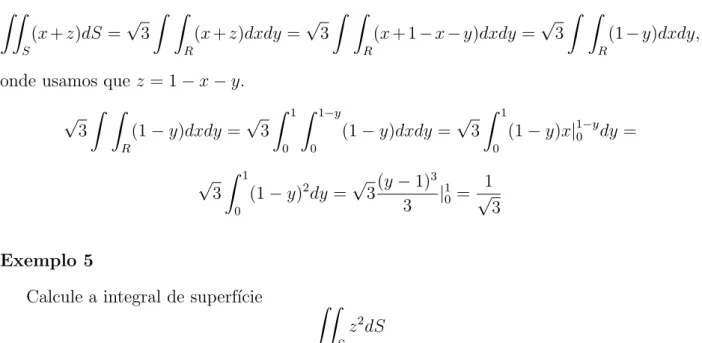
dxdy = Z Z R 3x 4 − 3y 2 + 1 2 dxdy.
A regi˜ao R ´e mostrada na figura 2.19
Figura 2.19: exemplo
Z Z R 3x 4 − 3y 2 + 1 2 dxdy= Z 1 0
Z 2(1−y)
0 3x 4 − 3y 2 + 1 2
dxdy= 1 2
Exemplo 7
Calcule a integral RR
SF· ndS, onde F(x, y, z) = ixz +kz
2 e S ´e a parte da esfera pertencente ao primeiro octante (ver figura 2.15), ent˜ao
z =f(x, y) =p1−x2−y2, e assim como j´a vimos antes,
∂f ∂x =−
x
z e
∂f ∂y =−
y z.
Que nos d´a,
Z Z
S
F·ndS =
Z Z
R
h
−xz−x z
+z2idxdy
=
Z Z
R
x2+ 1−x2−y2
dxdy=
Z Z
R
1−y2
dxdy = Z Z R dxdy− Z Z R
y2dxdy,
onde a regi˜ao R ´e mostrada na figura 2.15. Note que a primeira integral representa a ´area de um quarto do c´ırculo de raio 1, que ´e igual a π4. Vamos aplicar coordenadas polares para resolver a outra integral,
Z Z
R
y2dxdy=
Z π2
0
Z 1
0
r2sen2θrdrdθ =
Z π2
0
sen2θdθ
Z 1
0
r3dr= π 16
Assim,
Z Z
S
F·ndS = π 4 −
π
16 = 3π
2.4. A DIVERG ˆENCIA 25
2.4
A Divergˆ
encia
Considere a integral de superf´ıcie sobre o campo vetorial qualquerF:
Z Z
S
F·ndS.
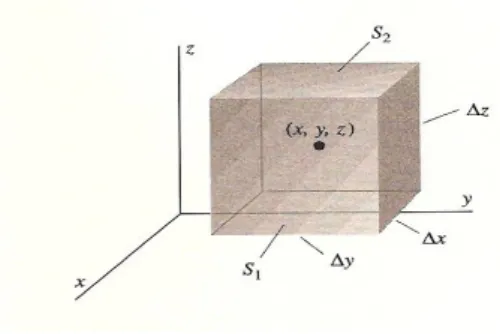
Vamos tentar encontrar uma rela¸c˜ao entre a integral de um campo e a divergˆencia desse campo. Assim, considere um cubo com lados ∆x, ∆y e ∆z paralelos aos eixos coordenados, figura 2.20. Suponha que o ponto central do cubo tenha coordenadas (x, y, z). Calculemos
Figura 2.20: exemplo
a integral de superf´ıcie de F sobre a superf´ıcie do cubo. Essa integral pode ser dividida em 6 termos, onde cada uma ser´a uma face do cubo. Vamos come¸car considerando a face S1, indicada na figura 2.20, assim
Z Z
S1
F·ndS.
O vetor normal unit´ario dessa face ´e claramente o vetor i. Temos assim que F·i =Fx, e a
integral correspondente,
Z Z
S1
Fx(x, y, z)dS.
Suponha que esse cubo ´e tal pequeno quando necess´ario (eventualmente, faremos sua ´area tender a zero). Consequentemente, calculamos est´a integral aproximando o valor deFx pelo
seu valor no centro da face S1 e multiplicaremos pela ´area dessa face1. As coordenadas do centro de S1 s˜ao (x+ ∆x/2, y, z). Assim,
Z Z
S1
Fx(x, y, z)dS ≈Fx
x+∆x 2 , y, z
∆y∆z.
O mesmo procedimento pode ser aplicado a faceS2, por´em o vetor normal unit´ario para essa face ´e−i e o ponto central da face ser´a (x−∆x/2, y, z), assim,
Z Z
S2
F·ndS =−
Z Z
S2
Fx(x, y, z)dS ≈ −Fx
x− ∆x
2 , y, z
∆y∆z.
1
Existe um teorema do valor m´edio, que diz que a integral deFxsobreS1´e igual a ´area deS1multiplicada
pela fun¸c˜ao calculada em algum ponto de S1. Desde que S1 seja suficientemente pequena o ponto onde
dever´ıamos calcularFx e o ponto central do cubo estar˜ao suficientemente pr´oximos, al´em disso, faremos a
´
Somando a contribui¸c˜ao dessas duas faces, temos que
Z Z
S1+S2
F·ndS ≈
Fx
x+ ∆x 2 , y, z
−Fx
x− ∆x
2 , y, z
∆y∆z
= Fx x+ ∆x
2 , y, z
−Fx x− ∆2x, y, z
∆x ∆x∆y∆z.
Considerando que ∆V = ∆x∆y∆z, o volume do cubo, temos que
1 ∆V
Z Z
S1+S2
F·ndS ≈ Fx x+
∆x
2 , y, z
−Fx x− ∆2x, y, z
∆x
Agora fa¸ca esse limite quando o valor de ∆V se aproxima de zero. Claramente quando o volume de ∆V tende a zero2, a mesma coisa acontece para cada lado do cubo. Assim do lado direito da equa¸c˜ao temos que lim∆x→0 no lugar de lim∆V→0, e finalmente
lim ∆V→0
1 ∆V
Z Z
S1+S2
F·ndS = lim ∆x→0
Fx x+∆2x, y, z
−Fx x− ∆2x, y, z
∆x =
∂Fx
∂x
em (x, y, z). Essa ´ultima igualdade segue da defini¸c˜ao de derivadas parciais. N˜ao deve ser nenhuma surpresa que os outros dois pares de faces do cubo contribuem com ∂Fy/∂y e
∂Fz/∂z. Assim,
lim ∆V→0
1 ∆V
Z Z
S
F·ndS = ∂Fx
∂x + ∂Fy
∂y + ∂Fz
∂z .
O limite do lado esquerdo da ´ultima equa¸c˜ao ´e a divergˆencia de F. Assim demostramos, o que j´a hav´ıamos definido,
divF= ∂Fx
∂x + ∂Fy
∂y + ∂Fz
∂z .
2.5
A divergˆ
encia em coordenadas cil´ındricas e esf´
ericas
Agora ao inv´es de usarmos as coordenadas cartesianas para o calculo do da divergˆencia usaremos outro sistema de coordenadas. Come¸caremos usando o sistema de coordenadas cil´ındricas. Neste sistema o campo vetorial Ftem trˆes componentes que chamaremos deFr,
Fθ eFz, ver figura 2.21 Para obtermos a divergˆencia deFem coordenadas cil´ındricas, vamos
considerar ‘cubo cil´ındrico’ como mostra a figura 2.22 com volume ∆V =r∆r∆θ∆z e centro no ponto (r, θ, z)3. O fluxo de Fna face 1 ´e
Z Z
S1
F·ndS =
Z Z
S1
FrdS ≈Fr
r+ ∆r
2 , θ, z r+ ∆r
2
∆θ∆z,
j´a na face 2,
Z Z
S2
F·ndS =−
Z Z
S2
FrdS ≈ −Fr
r− ∆r
2 , θ, z r− ∆r
2
∆θ∆z,
2
Note que a proposta ´e calcularmos esse mesmo limite em todas as faces do cubo.
3
Note que em coordenadas cartesianas 2.20 cada face do cubo tem ´e dada por uma equa¸c˜ao da forma,
2.6. O TEOREMA DA DIVERG ˆENCIA 27
Figura 2.21: exemplo
Figura 2.22: exemplo
Como fizemos no cubo, vamos somar as duas faces e dividir o resultado pelo seu volume,
Z Z
S1+S2
F·ndS ≈ 1 r∆r
r+ ∆r 2
Fr
r+ ∆r 2 , θ, z
−
r−∆r
2
Fr
r− ∆r
2 , θ, z
,
quando mandamos o limite de ∆r (consequentemente o de ∆V) para zero, temos
1
r ∂
∂r(rFr).
Fazendo o mesmo procedimentos para as outras 4 faces temos que a divergˆencia em coorde-nadas cil´ındricas ´e:
divF= 1
r ∂
∂r(rFr) +
1
r ∂Fθ
∂θ + ∂Fz
∂z . (2.2)
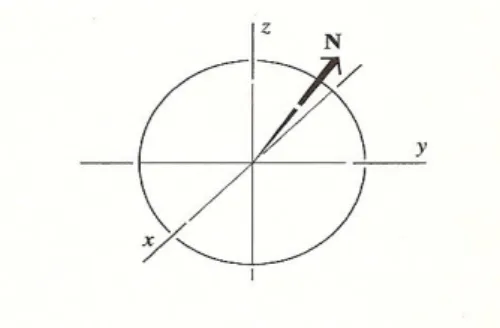
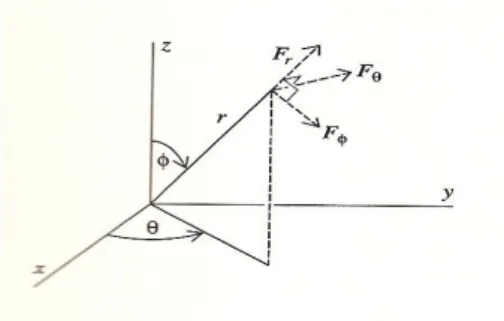
Em coordenadas esf´ericas as componentes deFs˜aoFr,FθeFφ(ver figura 2.23), procedendo
como no caso anterior temos que a divergˆencia em coordenadas esf´erica ´e dada pela express˜ao,
divF= 1
r2
∂ ∂r(r
2F
r) +
1
rsenφ ∂
∂φ(senφFφ) +
1
rsenφ ∂Fθ
∂θ . (2.3)
2.6
O Teorema da Divergˆ
encia
Figura 2.23: exemplo
N˜ao daremos uma prova formal e rigorosa desse teorema, tal prova pode ser encontrada em um livro de calculo mais avan¸cado.
Considere um superf´ıcie fechada. Subdivida o volume V delimitado por S em N sub-volumes, isso ´e mostrado na figura 2.24(desenhamos um cubo por conveniˆencia). Come¸caremos
Figura 2.24: exemplo
a prova afirmando que o fluxo de um campo vetorialF(x, y, z) sobre a superf´ıcieS ´e igual a soma dos fluxos de todas as superf´ıcies de cada sub-volume:
Z Z
S
F·ndS =
N
X
l=1
Z Z
Sl
F·ndS. (2.4)
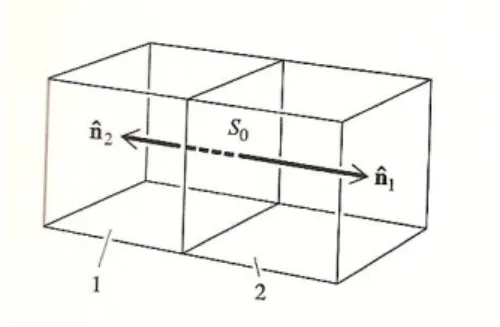
Agora Sl´e a superf´ıcie fechada que tem sub-volume ∆Vl. Para estabelecermos a equa¸c˜ao
2.4, considere 2 sub-volumes adjacentes (ver figura 2.25). Seja S0 a face em comum a essas duas superf´ıcies. Claramente o fluxo nos dois sub-volumes tˆem suas contribui¸c˜oes na face
S0, ou seja, temos
Z Z
S0
F·n1dS e Z Z
S0
F·n2dS,
onde n1 ´e o vetor normal unit´ario a face S0, na conven¸c˜ao usual, nos pontos do sub-volume
1. J´a n2 ´e o vetor normal unit´ario as pontos do sub-volume 2. Claramente,n1=-n2.
Dessa forma, todos as faces comuns a dois sub-volumes iram se cancelar na soma da equa¸c˜ao 2.4, pois
Z Z
S0
F·n1dS+ Z Z
S0
F·n2dS = Z Z
S0
F·n1dS− Z Z
S0
2.6. O TEOREMA DA DIVERG ˆENCIA 29
Figura 2.25: exemplo
Como vimos todos esses termos s˜ao cancelados na equa¸c˜ao 2.4, ou seja eles n˜ao contribuem na soma. De fato, isso acontece para qualquer dois sub-volume adjacentes. Mais toda superf´ıcie dos sub-volumes, salvo as que pertencem a superf´ıcie original, s˜ao adjacentes a alguma outra superf´ıcie de um outro sub-volume. Assim os ´unicos termos que n˜ao se cancelam na equa¸c˜ao 2.4 s˜ao os que pertencem a superf´ıcie S. O que valida a equa¸c˜ao 2.4.
Agora re-escreva a equa¸c˜ao 2.4 na seguinte forma curiosa:
Z Z
S
F·ndS =
N
X
l=1
1 ∆Vl
Z Z
Sl
F·ndS
∆Vl. (2.5)
Claramente, isto n˜ao altera nada desde que n´os apenas multiplicamos o termo dividido da soma por ∆Vl, o sub-volume fechado pela superf´ıcie Sl. N´os agora podemos particionar o
volume original V em um n´umero grande de sub-volumes cada vez menores. Em outras palavras, n´os passamos o limite na soma da Equa¸c˜ao 2.5 com o n´umero de sub-divis˜oes tendendo a infinito e cada ∆Vl tendendo para zero. N´os reconhecemos que o limite da
quantidade nos cubos da Equa¸c˜ao 2.5 ´e, por defini¸c˜ao (∇ ·F)l, que ´e, a divergˆencia de F
calculada em um ponto de ∆Vl que ´e pequeno. Assim, para cada ∆Vl realmente pequeno,
temos da Equa¸c˜ao 2.5 que
Z Z
S
F·ndS =
N
X
l=1
(∇ ·F) ∆Vl. (2.6)
No limite, essa soma, por defini¸c˜ao ´e a integral tripla de ∇ ·F sobre o volume fechado por
S:
lim
N→∞
cada ∆Vl→0
N
X
l=1
(∇ ·F) ∆Vl ≡
Z Z Z
V ∇ ·
FdV.
Juntando a ´ultima equa¸c˜ao com a equa¸c˜ao 2.4, encontramos o resultado desejado:
Z Z
S
F·ndS =
Z Z Z
V ∇ ·
FdV. (2.7)
a maior raz˜ao da prova dada n˜ao ser considerada rigorosa ´e que a integral tripla ´e definida como o limite de uma soma da forma:
N
X
l=1
g(xl, yl, zl)∆Vl,
onde a fun¸c˜ao g ´e bem definida. Na equa¸c˜ao 2.5, entretanto, o quantidade que multiplica o elemento de volume ∆Vl em cada termo da soma n˜ao ´e uma fun¸c˜ao bem definida neste
sentido. Isto ´e, como ∆Vl tende a zero a quantidade nos cubos muda; pode ser identificada
como a divergˆencia de F somente no limite. Felizmente, um estudo rigoroso mostra que a Equa¸c˜ao 2.7 ´e valida se F (que ´e, Fx, Fy e Fz) ´e continua e diferenci´avel, e suas primeiras
derivadas s˜ao continuas emV e em S.
Figura 2.26: exemplo
Vamos agora ilustrar o teorema da divergˆencia. Para isso vamos resolver um exemplo simples. Seja F(x, y, z) = ix+jy+kz e escolha para S a superf´ıcie da figura 2.26, que ´e a semi-esfera de raio 1 e a regi˜ao R do plano xy ´e limitada pelo circulo unit´ario. Neste hemisf´erio temos que n=ix+jy+kz, assimF·n=x2+y2+z2 = 1. Neste hemisf´erio,
Z Z
F·ndS =
Z Z
dS = 2π,
onde a ´ultima igualdade segue do fato que a integral ´e meramente a ´area do hemisf´erio unit´ario. Na regi˜ao R temos que n=−k com issoF·n=−z,
Z Z
F·ndS =−
Z Z
z dx dy= 0,
pois z = 0 em toda regi˜ao R. Dessa forma, n˜ao existe contribui¸c˜ao da regi˜ao circular R na integral de superf´ıcie e
Z Z
S
F·ndS = 2π.
Por outro lado, trivialmente calculamos o ∇ ·F= 3. Segue que
Z Z Z
V ∇ ·
FdV = 3
Z Z Z
V
dV = 32π 3 = 2π
2.7. EXERC´ICIOS 31
2.7
Exerc´ıcios
1. Encontre o vetor normal unit´ario nos seguintes casos:
a) z= 2−x−y; b) z= (x2+y2)1/2;
c) z= (1−x2)1/2; d) z=x2+y2;
e) z= (1−x2/a2−y2/a2)1/2.
2. a) Mostre que o vetor normal unit´ario para o plano
ax+by+cz=d
´e dado por
n=± ia+jb+kc (a2+b2+c2)1/2
b) Explique geometricamente por que o vetor normal n˜ao depende da constante d.
3. Calcule a integral de superf´ıcie RR
SG(x, y, z)dS
a) G(x, y, z) = z, onde S ´e a parte do plano x+y+z = 1 no primeiro octante;
b) G(x, y, z) = 1
1 + 4(x2+y2), onde S ´e a parte do paraboloide z = x
2 +y2 entre
z= 0 e z = 1;
c) G(x, y, z) = (1−x2−y2)3/2, onde S ´e o hemisf´erio z = (1−x2−y2)1/2.
4. Calcule a integral de superf´ıcie
Z Z
S
F·ndS
a) F(x, y, z) =ix−kz, ondeS´e a parte do planox+y+ 2z = 2 no primeiro octante; b) F(x, y, z) =ix+jy+kz, onde S ´e o hemisf´erio z = (1−x2−y2)1/2;
c) F(x, y, z) =jy+k, ondeS ´e a parte do paraboloidez = 1−x2−y2 no plano-xy.
5. `As vezes as integrais de superf´ıcie podem ser calculadas sem usar os procedimentos
esbo¸cados no texto. Calcule
Z Z
S
F·ndS para cada item abaixo. Pense um pouco e evite muito trabalho!
Figura 2.27: exerc´ıcio
Figura 2.28: exerc´ıcio
b) F= (ix+jy) ln(x2+y2), onde S ´e o cilindro (incluindo o fundo e o topo) de raio
R e alturah, como mostra a figura 2.28;
c) F = (ix+jy+kz)e−x2+y2+z2, onde S ´e a esfera de raio R centrada na origem,
como mostra a figura 2.29;
Figura 2.29: exerc´ıcio
d) F=iE(x), onde E(x) ´e um fun¸c˜ao escalar qualquer que s´o depende dex. E S ´e o cubo de ladob, como mostra a figura 2.30.
2.7. EXERC´ICIOS 33
Figura 2.30: exerc´ıcio
vetores unit´arios em coordenadas cil´ındricas. Mostre que
i = ercosθ−eθsenθ,
j = ersenθ−eθcosθ,
k = ez.
b) Escreva a fun¸c˜ao (−ixy+jx2)/(x2+y2), onde (x, y) 6= (0,0), em coordenadas cil´ındricas e calcule sua divergˆencia utilizando a equa¸c˜ao 2.2.
7. a) Sejam i, j e k os vetores unit´arios em coordenadas cartesianas e er, eθ, e eφ os
vetores unit´arios em coordenadas esf´ericas. Mostre que
i = ersenφcosθ+eφcosφcosθ−eθsenθ,
j = ersenφsenθ+eφcosφsenθ+eθcosθ,
k = ercosθ−eφsenφ.
[Sugest˜ao: ´E mais f´acil expressar er, eθ, e eφ em termos de i, j e k e a seguir
resolve algebricamente para i, j e k. Para fazer isto, use primeiramente que er = r/r = (ix +jy + kz)/r. Depois, resolva geometricamente, mostre que
eθ =−isenθ+jcosθ. Finalmente, calcule eφ =eθ×er ]
b) Escreva a fun¸c˜ao ix+jy+kz, em coordenadas esf´ericas e calcule sua divergˆencia utilizando a equa¸c˜ao 2.3.
8. Verifique o teorema da divergˆencia
Z Z
S
F·ndS =
Z Z Z
V ∇ ·
FdV
para os seguintes casos:
a) F=ix+jy+kz, ondeS s˜ao os quadrados de lado b, mostrados a figura 2.30; b) F= err+ezz), r = ix+jy e S ´e um quarto do cilindro (de raio R e altura h),
como mostra a figura 2.31;
c) F=err2, r=ix+jy+kz, ondeS ´e a esfera de raioR centrada na origem, como
Figura 2.31: exerc´ıcio
9. a) Use o teorema da divergˆencia para mostrar que
1 3
Z Z
S
n·rdS =V,
onde S ´e fechada que limita uma regi˜ao de volume V, n ´e um vetor unit´ario normal a superf´ıcie S, er=ix+jy+kz.
b) Use a express˜ao dada no item a) para encontrar o volume de: i) um paralelep´ıpedo de lados a, b ec.
ii) um cone circular com altura h e base de raio R. [Sugest˜ao: O calculo ´e simples com o cone orientado como mostra a figura 2.32].
Figura 2.32: exerc´ıcio
Cap´ıtulo 3
Integral de Linha e o Rotacional
3.1
Trabalho e Integral de Linha
A propriedade dos campos eletrost´aticos que n´os come¸caremos agora a discutir est´a intima-mente ligada com a pergunta do trabalho e da energia. Vocˆe se lembra da defini¸c˜ao elementar de trabalho, for¸ca vezes distˆancia. Assim, em uma dimens˜ao, se a for¸caF(x) atua de x=a
para x=b, o trabalho ´e dado, por defini¸c˜ao,
Z b
a
F(x)dx.
Para podermos falar de uma situa¸c˜ao mais geral, devemos introduzir o conceito de integral de linha.
Figura 3.1: exemplo
Suponha que tenhamos uma curva em trˆes dimens˜oes (figura 3.1) e suponha que essa curva seja direcionada. Isso significa que colocamos uma seta sobre a curva e definimos esse sentido como o positivo. Seja s um comprimento de arco ao longo da curva medido de algum ponto arbitr´ario nela com s = s1 em um ponto P1 e s = s2 em P2. Suponha que tenhamos uma fun¸c˜ao f(x, y, z) definida sobre essa curva, C. Subdivida a curva C entreP1 e P2 em N peda¸cos arbitr´arios. A figura 3.1 mostra um exemplo com 4 subdivis˜oes. Em seguida, junte os pontos sucessivos da subdivis˜ao por segmentos de reta, diga que l-´esimo, tem comprimento ∆Sl. Agora, calcule o valor de f(x, y, z) em (xl, yl, zl), qualquer ponto na
l-´esima subdivis˜ao da curva, e fa¸ca o produtof(x, y, z) ∆Sl. Feito isso para cada um dos N
segmentos de C, fa¸ca a soma
N
X
l=1
f(x, y, z) ∆Sl.
Por defini¸c˜ao, a integral de linha de f(x, y, z) ao longo da curva C ´e o limite dessa soma quando o numero de subdivis˜oesN se aproxima do infinito fazendo o o comprimento de cada arco se aproximar a zero:
Z
C
f(x, y, z)ds= lim
N→∞
cada ∆Sl→0
N
X
l=1
f(x, y, z) ∆Sl.
Para calcular a linha integral, precisamos saber o caminho de C. Geralmente a maneira mais conveniente de especificar este caminho ´e usar s para parametriza-lo via comprimento de arco. Assim, escrevemos x = x(s), y = y(s) e z = z(s). Neste caso, a integral de linha se reduz a:
Z
C
f(x, y, z)ds =
Z s2
s1
f(x(s), y(s), z(s))ds.
Vamos ver um exemplo, por simplicidade trabalharemos em duas dimens˜oes, calcule
Z
C
(x+y)ds,
onde C ´e a linha reta que sai da origem at´e a coordenada (1,1), ver figura 3.2. Se (x, y)
Figura 3.2: exemplo
s˜ao a coordenada de qualquer pontoP em C e se s ´e a medida do seu comprimento de arco desde a origem, ent˜ao x=s/√2 e y=s/√2. Dessa forma, x+y= 2s/√2 = √2s. Assim,
Z
C
(x+y)ds =√2
Z √2
0
s ds=√2.
Vamos integrar agora a mesma fun¸c˜ao x+y de (0,0) para (1,1) considerando as subdi-vis˜oes mostradas na figura 3.3. Temos que separar a integral em duas partes, ao longo de
C1, e ao longo de C2. Em C1 temos x=s ey= 0. Assim, x+y =s, e
Z
C1
(x+y)ds =
Z 1
0
3.2. INTEGRAL DE LINHA ENVOLVENDO CAMPO VETORIAL 37
Figura 3.3: exemplo
Ao longo de C2,x= 1 e y =s, note que o comprimento de arco desse segmento ´e medido a partir do ponto (1,0). Segue que,
Z
C2
(x+y)ds=
Z 1
0
(1 +s)ds= 3 2.
Somando os dois resultados temos que,
Z
C
(x+y)ds=
Z
C1
(x+y)ds+
Z
C2
(x+y)ds= 1 2+
3 2 = 2.
A li¸c˜ao a ser aprendida ´e esta: o valor de uma integral pode (geralmente) depender do caminho de integra¸c˜ao.
3.2
Integral de Linha Envolvendo Campo Vetorial
Embora a discuss˜ao precedente nos diga o que ´e uma integral de linha, o tipo de integral de linha que n´os devemos tratar aqui tem uma caracter´ıstica que ainda n˜ao foi mencionada. N´os introduzimos as integrais de linha atrav´es do conceito de trabalho. Trabalho, no sentido mais elementar, ´e o deslocamento da for¸ca no tempo. Essa elabora¸c˜ao torna-se mais clara quando reconhecemos que for¸ca e deslocamento s˜ao vetores.
Assim, considere uma parti¸c˜ao da curva C em trˆes dimens˜oes (figura 3.4). Vamos supor
que sob a a¸c˜ao de uma for¸ca um objeto se move neste caminho des1 para s2. Em qualquer ponto P da curva designaremos f(x, y, z) como a a¸c˜ao dessa for¸ca. A componente de f que exerce o trabalho ´e, por defini¸c˜ao, simplesmente a que atua ao longo da curva, isto ´e, a componente tangencial. Sejat o vetor unit´ario que ´e tangente a curva no ponto P 1. Ent˜ao o trabalho realizado pela for¸ca em mover o objeto de s1 para s2 ao longo da curva C ´e
T =
Z
C
f(x, y, z)·tds,
onde se compreende, naturalmente, que a integra¸c˜ao come¸ca ems=s1 e termina ems =s2. A nova caracter´ıstica desta integral ´e que o integrando ´e o produto escalar de duas fun¸c˜oes vetoriais. Para avaliarmos essa integral devemos saber encontrar t, e ´e esse o problema que tentaremos resolver agora.
Considere um curva arbitr´aria C (ver figura 3.5) parametrizada pelo comprimento de arco. Em algum ponto s na curva temos que x =x(s), y = y(s) e z =z(s). Em um outro
Figura 3.5: exemplo
pontos+ ∆s temosx+ ∆x=x(s+ ∆s),y+ ∆y=y(s+ ∆s) ez+ ∆z =z(s+ ∆s). Assim, o segmento de reta que une os dois pontos na curva direcionada do primeiro ao segundo ´e o vetor ∆r=i∆x+j∆y+k∆z, onde
∆x = x(s+ ∆s)−x(s),
∆y = y(s+ ∆s)−y(s),
∆z = z(s+ ∆s)−z(s).
Se dividirmos esse vetor por ∆s, temos
∆r ∆s =i
∆x
∆s +j
∆y
∆s +k
∆z
∆s
Tomando o limite quando ∆s se aproxima de zero, temos
idx
ds +j dy ds +k
dz ds
1t
3.2. INTEGRAL DE LINHA ENVOLVENDO CAMPO VETORIAL 39
afirmamos que esse limite ´e o campo t. Para come¸car, ´e claro que quando ∆s →0, o vetor ∆rtangˆencia a curva s. Al´em disso, no limite ∆s →0, vemos que|∆r→∆s|. Portanto, no limite a norma deste vetor ´e 1. Segue que
t=idx
ds +j dy ds +k
dz ds
Se retornarmos agora a express˜ao do trabalho T e usarmos a formula de t, encontramos
T =
Z
C
f(x, y, z)·tds =
Z
C
f(x, y, z)·
idx
ds +j dy ds +k
dz ds ds = Z C
(fxdx+fydy+fzdz).
Esta ´e uma express˜ao formal; frequentemente, para realizar a integra¸c˜ao, ´e ´util restaurar o
ds como ilustra o exemplo a seguir. Considere
f(x, y, z) = iy−jx
e a curva mostrada na figura 3.6. Para calcular R
C(f ·t)ds neste caso, divida a curvaC em
trˆes partes, C1,C2 eC3 como mostramos. Considerando fz = 0, temos
Figura 3.6: exemplo
Z
C
f ·tds =
Z
C
fxdx+fydy =
Z
C
y dx−x dy
Agora, em C1, y = 0 e dy = 0, assim C1 n˜ao contribui na integral. Similarmente, em C3 temos x = 0 e dx = 0, o que d´a resultado igual a zero. Assim, a ´unica contribui¸c˜ao para a integral sobre C e a parte emC2. Restaurando o ds, temos
Z
C
ydx ds −x
dy ds
ds.
Mas (1−x)/s= cos 450 = 1/√2 e (1−x)/s= sen 450 = 1/√2 (figura 3.7). Assim,
x= 1− √s
2 ⇒
dx ds =−
1
√
2
y= √s 2 ⇒ dy ds = 1 √ 2
Figura 3.7: exemplo
Dessa forma, a integral ´e
Z √
2
0
s
√
2
−√1
2
−
1− √s 2
1
√
2
ds=−√1 2
Z √
2
0
ds =−1.
Um segundo exemplo de integral de linha envolvendo fun¸c˜oes vetoriais, seja
f(x, y, z) =ix2−jxy,
e tome C o quarto de circulo de raio R orientado como mostra a figura 3.8. Ent˜ao temos
Figura 3.8: exemplo
Z
C
f ·tds=
Z
C
x2dx−xy dy.
Considerando x=Rcosθ,y =Rsenθ, encontramos esta integral como
Z π/2
0
[R2cos2θ(−Rsenθ)−R2senθcosθ(Rcosθ)]dθ=−2R3
Z π/2
0
3.3. O ROTACIONAL 41
3.3
O Rotacional
Se n´os ´e dado uma fun¸c˜ao vetorial F(x, y, z) e perguntado, “ Poderia ser esse um campo eletrost´atico?”, podemos, a principio, responder. Se
I
F·tds6= 0
sobre uma curva ent˜aoF n˜ao pode ser um campo eletrost´atico. Se
I
F·tds= 0
sobre qualquer curva fechada, ent˜ao F pode (mas n˜ao tem que ser) ser um campo ele-trost´atico. Claramente, este crit´erio n˜ao ´e f´acil de aplicar, pois devemos saber que a cir-cula¸c˜ao de F´e zero sobre todos os caminhos poss´ıveis.
Vamos tentar encontrar um crit´erio mais ´util. Considere a circula¸c˜ao de F em um retˆangulo pequeno paralelo ao planoxy, com lados ∆x e ∆ye com o ponto central (x, y, z), ver figura 3.9 Como ´e mostrado na figura 3.9, faremos a integra¸c˜ao no sentido anti-hor´ario de que olha de cima do plano xy. Vamos quebrar essa integral de linha em quatro par-tes: CB (parte inferior), CR (lado direito), CL (lado direito) e CT (parte superior). Essa
Figura 3.9: exemplo
retˆangulo ´e pequeno (eventualmente no limite faremos ele tender a zero), n´os aproximare-mos a integral sobre cada segmento por F·t avaliado no centro do segmento, multiplicado pelo comprimento do segmento2.
Consideraremos CB primeiro, temos que
Z
CB
F·tds =
Z
CB
Fxdx∼=Fx
x, y− ∆y
2 , z
∆x. (3.1)
EmCT encontramos,
Z
CT
F·tds =
Z
CT
Fxdx∼=−Fx
x, y+∆y 2 , z
∆x. (3.2)
2
O sinal negativo aqui se refere ao fato que
Z
CT
Fxdx=
Z
CT
Fx
dx ds ds
e dx/ds=−1 emCT. Somando as equa¸c˜oes 3.1 e 3.2 temos,
Z
CT+CB
F·tds ∼= −
Fx
x, y+∆y 2 , z
∆x−Fx
x, y− ∆y
2 , z
∆x ∼ = − Fx
x, y+ ∆y 2 , z
−Fx
x, y−∆y
2 , z
∆y ∆x∆y.
Claramente ∆x∆y´e a ´area de ∆S do retˆangulo. Assim,
1 ∆S
Z
CT+CB
F·tds∼=−
Fx
x, y+∆y 2 , z
−Fx
x, y− ∆y
2 , z
∆y . (3.3)
Exatamente a mesma an´alise se aplica ao lado esquerdo e direito do retˆangulo (CLeCR)
resultando em
1 ∆S
Z
CL+CR
F·tds ∼=
Fy
x+ ∆x 2 , y, z
−Fy
x− ∆x
2 , y, z
∆x . (3.4)
Fazendo a soma da equa¸c˜oes 3.3 e 3.4 e tomando o limite quando ∆S se fecha sobre o ponto (x, y.z) (neste caso, ∆x e ∆y→0 ao mesmo tempo), encontramos
lim ∆S→0 sobre (x,y,z)
1 ∆S
Z
F·tds= ∂Fy
∂x − ∂Fx
∂y ,
onde estamos considerando a circula¸c˜ao em torno do retˆangulo pequeno. Vocˆe pode querer se perguntar sobre a generalidade e a unicidade deste resultado pois ele ´e obtido usando uma curva especial para a integra¸c˜ao: primeiro, um retˆangulo, e segundo, ele ´e paralelo ao plano
xy. Se a curva n˜ao for um retˆangulo, mas uma curva plana da forma arbitr´aria, n˜ao afetaria nosso resultado (exerc´ıcios 1 e 12). Mas nosso resultado definitivamente depende em especial da orienta¸c˜ao da curva na integra¸c˜ao. A escolha da orienta¸c˜ao A escolha da orienta¸c˜ao feita acima sugere claramente duas outras, que s˜ao mostradas na figura 3.10 junto com o resultado do c´alculo, para cada uma de
lim ∆S→0
sobre (x,y,z) 1 ∆S
Z
F·tds.
3.3. O ROTACIONAL 43
Figura 3.10: exemplo
Figura 3.11: exemplo
sempre a esquerda, como mostra a figura 3.11. Ent˜ao escolha o vetor normal de modo que ele aponte para “acima” no sentido mostrado na figura 3.11. Esta conven¸c˜ao ´e chamada da regra da m˜ao direita, para que se a m˜ao direita ´e orientada de modo que os dedos ondulem no sentido em que a curva ´e seguida, o polegar, estendido, aponte no sentido do vetor normal (figura 3.11). Usando a regra da m˜ao direita, temos o seguinte:
calculando lim ∆S→0
I
F·t ds ∆S
para uma curva `a qual o normal ´ei, temos ∂Fz
∂y − ∂Fy
∂z ,
para uma curva `a qual o normal ´ej, temos ∂Fx
∂z − ∂Fz
∂x ,
para uma curva `a qual o normal ´ek, temos ∂Fy
∂x − ∂Fx
∂y ,
(3.5)
Dizemos que essas trˆes quantidades s˜ao as coordenadas cartesianas do vetor. Daremos o nome a este vetor de o “rotacional de F”, que escreveremos como rotF. Assim, temos que
rotF=,i
∂Fz
∂y − ∂Fy
∂z
+j
∂Fx
∂z − ∂Fz
∂x
+k
∂Fy
∂x − ∂Fx
∂y
Esta express˜ao ´e frequentemente ´e dada como a defini¸c˜ao do rotacional, mas n´os preferi-mos consider´a-la meramente como o forma do rotacional em coordenadas cartesianas. N´os definiremos o rotacional como o limite da circula¸c˜ao quando a ´area tende a zero. Mas
preci-samente, seja
Z
Cn
F·tds a circula¸c˜ao de F sobre uma curva com normal n como mostra a
figura 3.12. Ent˜ao por defini¸c˜ao
Figura 3.12: exemplo
n·rotF= lim ∆S→0 sobre (x,y,z)
1 ∆S
I
F·tds.
Tomandon sucessivamente igual ai, jek, temos de volta o resultado dado na Equa¸c˜ao 3.6. Esse limite, em geral, tem valores diferentes para pontos (x, y, z) diferentes, o rotacional de F´e a fun¸c˜ao vetorial da posi¸c˜ao 3. Embora em nosso trabalho supomos sempre que a ´area delimitada pela curva de integra¸c˜ao ´e plana, isto, necessariamente n˜ao precisa acontecer. Desde que o rotacional seja definido em termos de um limite no qual a superf´ıcie fechada se aproxime de zero para qualquer ponto, no estagio final desse processo de limite a superf´ıcie fechada ´e infinitessimalmente pr´oxima do plano, e todas as considera¸c˜oes feitas se aplicam.
A express˜ao 3.6 dada para o rotF em coordenadas cartesianas ´e quase imposs´ıvel de ser lembrada, por sorte existe uma forma mais f´acil de memoriza-la. Se expandirmos o determinante de
i j k
∂/∂x ∂/∂y ∂/∂z
Fx Fy Fy
e se certos “produtos” s˜ao interpretados como derivadas parciais (por exemplo, (∂/∂x)Fy =
∂Fy/∂x), o resultado ´e idˆentico ao dado na express˜ao 3.64. Assim, a ang´ustia de recordar a
f´ormula de rotFem coordenadas cartesianas pode ser substitu´ıda pela dor de recordar como expandir o determinante trˆes por trˆes. A vontade do cliente.
3
A palavrarota¸c˜ao(abreviada “rot”) j´a foi usada para o que n´os chamamos agora de rotacional. Embora esse terno tenha deixado de ser usado a muito tempo: Se rotF= 0, a fun¸c˜aoF´e dita irrotacional.
4
3.4. O ROTACIONAL EM COORDENADAS CIL´INDRICAS E ESF ´ERICAS 45
Um exemplo de calculo do rotacional, considere a fun¸c˜ao vetorial
F(x, y, z) = ixz+jyz−ky2.
Temos,
rotF=
i j k
∂/∂x ∂/∂y ∂/∂z
xy yz −y2
=i(−2y−y) +j(x−0) +k(0−0) =−3iy+jx.
Vocˆe pode ter observado que o operador rotacional pode ser escrito em termos da nota¸c˜ao com delta que introduzimos anteriormente. Vocˆe mesmo pode verificar que
rotF=∇ ×F,
que ´e lida “delta versos F”. A partir de agora usaremos∇ ×F para indicar o rotacional.
3.4
O Rotacional em Coordenadas Cil´ındricas e Esf´
ericas
Para obtermos a forma do∇ ×Fem outro sistema de coordenadas procederemos da mesma maneira que fizemos para coordenadas cil´ındricas, meramente usaremos a curva para inte-gra¸c˜ao apropriada. Como um exemplo, usaremos o caminho mostrado na figura 3.14 isso nos dar´a a componentez do∇ ×Fem coordenadas cil´ındricas5. Note que o tra¸co da curva est´a em concordˆancia com a regra da m˜ao direita dada na outra se¸c˜ao. Vendo a curva de acima (como n´os fazemos na figura 3.14), a integral de linha deF(r, θ, z)·t ao longo do segmento
Figura 3.13: exemplo
do caminho marcado 1 ´e
Z
C1
F·tds ≃Fr
r, θ− ∆θ
2 , z
∆r,
5
Analogamente a forma cartesiana de ∇ ×F, cada curva de integra¸c˜ao (ver figuras 3.9 e 3.10) tem a
enquanto oo longo do segmento 3 temos
Z
C3
F·tds ≃ −Fr
r, θ+ ∆θ 2 , z
∆r.
A ´area limitada pela curva ´er∆r∆θ, e
1 ∆S
Z
C1+C3
F·tds≃ − ∆r r∆r∆θ
Fr
r, θ+ ∆θ 2 , z
−Fr
r, θ− ∆θ
2 , z
.
No limite quando ∆r e ∆θ tendem a zero, isto ´e
−1r∂θFr
avaliado no ponto (r, θ, z).
Ao longo do segmento 2 encontramos
Z
C2
F·tds ≃Fθ
r+∆r
2 , θ, z r+ ∆r
2
∆θ,
e ao longo do segmento 4
Z
C4
F·tds≃ −Fθ
r− ∆r
2 , θ, z r− ∆r 2 ∆θ. Assim, 1 ∆S Z
C2+C4
F·tds≃ − ∆θ r∆r∆θ
r+ ∆r 2
Fθ
r+∆r 2 , θ, z
−
r− ∆r
2
Fθ
r−∆r
2 , θ, z
.
No limite temos (1/r)(∂/∂r)(rFθ) avaliado em (r, θ, z). Dessa forma,
(∇ ×F)z ≡ lim
∆S→0
I
C
F·tds= 1
r ∂
∂r(rFθ)−
1
r ∂Fr
∂θ .
Para encontrar as componentes r e θ de ∇ ×F os caminhos s˜ao mostrados na figura 3.14, respectivamente. Deixaremos como exerc´ıcio a obten¸c˜ao dessas duas componentes.
Para completar as trˆes componentes do ∇ ×Fem coordenadas cil´ındricas s˜ao dadas por:
(∇ ×F)r =
1 r ∂Fz ∂θ − ∂Fθ ∂z ,
(∇ ×F)θ =
∂Fr
∂z − ∂Fr
∂r ,
(∇ ×F)z =
1
r ∂
∂r(rFθ)−
1
r ∂Fr
∂θ .
Vamos calcular um exemplo de rotacional em coordenadas cil´ındricas, considere a fun¸c˜ao
3.4. O ROTACIONAL EM COORDENADAS CIL´INDRICAS E ESF ´ERICAS 47
Figura 3.14: exemplo
ent˜ao
(∇ ×F)r =
1
r ∂ ∂θ(r
3)
−∂z∂ (rz2cosθ) =−2rzcosθ,
(∇ ×F)θ =
∂ ∂z(r
2z)
− ∂r∂ (r3) =−2r2,
(∇ ×F)z =
1
r ∂ ∂r(r
2z2cosθ)−1
r ∂ ∂θ(r
2z) = 2z2cosθ,
portanto
∇ ×F=−2errzcosθ−2eθr2+ 2ezz2cosθ.
As trˆes componentes do rotFem coordenadas esf´ericas s˜ao as seguintes:
(∇ ×F)r =
1
rsenφ ∂
∂φ(senφFθ)−
1
rsenφ ∂Fφ
∂θ ,
(∇ ×F)φ =
1
rsenφ ∂Fr
∂θ −
1
r ∂
∂r(rFθ),
(∇ ×F)θ =
1
r ∂
∂r(rFφ)−
1
r ∂Fr
∂φ.
Vamos calcular um exemplo de rotacional em coordenadas esf´ericas, considere a fun¸c˜ao
F(r, θ, φ) = er
rθ +
eφ
r +
eθ
rcosφ
ent˜ao
(∇ ×F)r =
1
rsenφ ∂ ∂φ
senφ 1 rcosφ
− rsen1 φ ·0 = sec 2φ
r2senφ,
(∇ ×F)φ =
1
rsenφ ∂ ∂θ 1 rθ
−1r∂r∂ (cosφ) =− 1
r2θ2senφ,
(∇ ×F)θ =
1
r ∂ ∂r(1)−
1 r ∂ ∂φ 1 rθ
Assim
∇ ×F= sec 2φ
r2senφer− 1
r2θ2senφeφ.
3.5
O Teorema de Stokes
Nos concentraremos a partir de agora em um famoso teorema. Este teorema, que tem o nome do matem´atico Stokes, relaciona uma integral de linha em torno de um caminho fechado a uma integral da superf´ıcie sobre o que ´e chamado uma “superf´ıcie cobrindo” o caminho, assim a primeira coisa a fazermos ´e definir este termo. Suponha que tenhamos uma curva fechada C, como mostra a figura 3.15, e imagine que ela ´e feita de fio. Agora suponha que
Figura 3.15: exemplo
n´os anexamos uma membrana el´astica ao fio como indicado na figura 3.16. Essa membrana
Figura 3.16: exemplo
´e uma “superf´ıcie cobertura” da curva C. Qualquer outra superf´ıcie que possa ser formada esticando a membrana ´e uma “superf´ıcie cobrindo”; um exemplo ´e mostrado na figura 3.17. A figura 3.18 mostra quatro diferentes superf´ıcies cobertura de um caminho plano: (a) a
Figura 3.17: exemplo
3.5. O TEOREMA DE STOKES 49
Figura 3.18: exemplo
Ap´os essas notas pr´evias, vocˆe n˜ao ser´a surpreendido ao n´os ver come¸car o teorema de Stokes considerando uma curva fechada C e uma superf´ıcie cobertura S (ver figura 3.19) Como temos feito anteriormente, aproxime essa superf´ıcie cobertura por poliedros de N
Figura 3.19: exemplo
faces, onde cada um ´e tangente a S em apenas um ponto (ver figura 3.20). Note que com
Figura 3.20: exemplo
isso automaticamente criamos uma poligonal (marcada com P na figura 3.20) que ´e uma aproxima¸c˜ao para a curva C. Seja F(x, y, z) uma fun¸c˜ao vetorial bem comportada definida em toda a regi˜ao do espa¸co ocupada pela curva C e pela superf´ıcie coberturaS. Considere a circula¸c˜ao de F em torno deCl, o bordo da l-´esima face do poliedro:
I
Cl
F·tds.
Se n´os fazemos isto para cada um das faces do poliedro e ent˜ao adicionamos juntas todas as circula¸c˜oes, afirmamos que esta soma ser´a igual `a circula¸c˜ao de Fem torno da poligonal P:
N
X
l=1
I
Cl
F·tds=
I
P
Isto n˜ao ´e dif´ıcil de ser provado. Considere duas faces adjacentes como mostra a figura 3.21.
A circula¸c˜ao em torno da face do lado esquerdo inclui o segmento AB, que ´e
Z B
A
F·tds.
Figura 3.21: exemplo
Mas o segmento AB´e comum a ambas as faces, e contribui tamb´em para circula¸c˜ao da face do lado direito que ´e
Z A
B
F·tds =−
Z B
A
F·tds.
Note que o segmento AB tem uma dire¸c˜ao na face a esquerda, e a dire¸c˜ao contr´aria na face a direita. Dessa forma, quando olharmos a contribui¸c˜ao do segmento AB na circula¸c˜ao de F observamos que
Z B
A
F·tds+
Z A
B
F·tds= 0.
Dessa forma, se torna claro que qualquer segmento comum a duas faces adjacentes n˜ao con-tribui na soma da equa¸c˜ao 3.7 porque tais segmentos sempre vem em pares que se cancelam. Mas todos os segmentos s˜ao comuns a pares de faces adjacentes exceto aqueles, somados juntos, que constituem a poligonalP. Isso estabelece a equa¸c˜ao 3.7.
Agora vamos fazer uma an´alise muito similar a feita no caso do teorema da divergˆencia. Escreva
I
P
F·tds =
n
X
l=1
I
Cl
F·tds=
N
X
l=1
1 ∆Sl
I
Cl
F·tds
∆Sl, (3.8)
onde ∆Sl ´e a ´area da l-´esima face. O valor entre parˆentese, ´e aproximadamente, igual a
nl·(∇ ×F)l onde nl ´e o vetor normal unit´ario positivo em cada l-´esima face e (∇ ×F)l ´e
o rotacional da fun¸c˜ao vetorial F avaliada no ponto da l-´esima face que ´e tangente a S. Dizemos “aproximadamente” porque ´e na realidade o limite quando ∆Sl tende para zero
na express˜ao entre parˆentese na equa¸c˜ao 3.8, que ´e identificada com nl·(∇ ×F)l. Ignorando
essa falta de rigor, escrevemos
lim
N→∞
cada ∆Sl→0
N
X
l=1
1 ∆Sl
I
Cl
F·tds
∆Sl = lim N→∞
cada ∆Sl→0
N
X
l=1
nl·(∇ ×F)l∆Sl
=
Z Z
S
n·(∇ ×F)dS.
(3.9)
Desde que a curva C seja o limite da poligonal P, temos
lim
N→∞
cada ∆Sl→0
I
P
F·tds =
I
C