245
A MULTIGRID ACCELERATED HIGH-ORDER COMPACT
FRACTIONAL-STEP METHOD FOR UNSTEADY INCOMPRESSIBLE
VISCOUS FLOWS
Omer San 1,* & Kursat Kara2
1
Detpartment of Engineering Science and Mechanics, Virginia Polytechnic Institute and State University, Norris Hall, Room 227-A, Blacksburg, VA 24061, USA.
2
Department of Aerospace Engineering, Khalifa University of Science, Technology & Research, P.O.Box 127788, Abu Dhabi, UAE.
*
Email: [email protected] ABSTRACT
The objective of this study is the development of an efficient high-order compact scheme for unsteady incompressible viscous flows. The scheme is constructed on a staggered Cartesian grid system in order to avoid spurious oscillations in the pressure field. Navier-Stokes equations are advanced in time with the second order Adams-Bashford method without considering the pressure terms in the predictor step, the velocity field is then corrected such that discrete mass continuity equations satisfied through pressure Poisson equation. Since the efficiency of the fractional step method depends on the Poisson solver, a V-cycle multigrid acceleration with compact Mehrstellen discretization based iterative method is implemented in the pressure Poisson equation to enhance the computational efficiency. The efficiency and accuracy of iterative Poisson solvers (pseudo-time, Jacobi, Gauss-Seidel) are also tested within the multigrid framework. The method is then validated by the simulations of the Taylor-Green vortex decaying problem. Results show that the fractional-step compact scheme with multigrid acceleration has high resolving efficiency that drastically reduces computational time and high-order accuracy making the method applicable for simulation of incompressible viscous flows.
Keywords:Incompressible flow, High-order methods, Compact schemes, Fractional-step procedure, Staggered grid, V-cycle multigrid acceleration
1. INTRODUCTION
Computational study of incompressible flow problems in both basic research and engineering applications has been performed for long times. Incompressible flow is an approximation of flow where flow speed is insignificant compared to the speed of sound [1]. Since the numerical stability of the density-based numerical algorithms (i.e., full Navier-Stokes algorithms) depends on the speed of sound, the time step is restricted with this high velocity even if
we have low speed flows (i.e. numerical stability criterion is in the form of
a u
x t
| |
). There are mainly two
different approaches for solving viscous incompressible flow problems. The first is based on still compressible flow formulations where momentum and continuity equations are coupled through the use of density which is called "density-based preconditioned" approach. The typical idea is to use the pseudo speed of sound to precondition system such that time integration is performed in physical time, and pseudo compressibility time is used to precondition the system and obtain the solution at each time level; see e.g., [2, 3, 4]. Incompressibility is recovered as a limiting case of this formulation. The other alternative way to model low speed flows by using incompressible flow assumption by changing the character of governing equations from hyperbolic to parabolic. This is based on satisfying the incompressibility directly through the pressure as a mapping parameter to satisfy this condition. This class of methods is generally called as the "pressure-based" methods; see e.g., [5, 6, 7, 8]. For a given velocity field, the pressure can be calculated without knowing history. The pressure equation is elliptic in character. At each time step (or iterations for steady flows) a pressure Poisson equation has to be solved to obtain the pressure field. Most of this type of algorithms are decoupled such that momentum equations are solved separately, and pressure equation is solved to satisfy the mass continuity equation [1].
246
sometimes called as predictor-corrector, or time-splitting, or projection methods. The common implementation of this framework is done in two steps: The first step is to solve for intermediate auxiliary velocity field using the momentum equation, in which the pressure gradient term can be computed from the pressure in previous step or can be excluded entirely. In the next step, the pressure is computed, which can map the intermediate velocity on the divergence-free velocity field by satisfying the discrete mass continuity equations to the current step. Fractional-step methods can be used together with different space discretizations such as finite difference, finite element, and spectral methods with various order of space and time accuracy [11].
Computational algorithms developed in the past were mainly designed for solving large scale fluid dynamics problems with the second-order space accuracy. Recently, people have been paying more attention to numerical simulation of complex flows with multiscale structures such as turbulent flows. Simulation of turbulent or other convection dominated unsteady flows using direct numerical simulation or large eddy simulation (LES) requires a numerical method that properly resolves all the multi-structured flow scales. There are two ways to improve the resolution of the method. One of them is to refine the grid and the other is to construct a high order accurate scheme. Since high-order accurate computational methods are both desirable and preferred, compact finite difference methods feature high-order accuracy with smaller stencils and easier implicit application of boundary conditions, and have been employed as an alternative to spectral methods in simulation of turbulence with their flexibility [12, 13, 14, 15].
The advantage of the finite difference compact methods is to interpolate the variables without taking integration by parts to keep order of accuracy. Zhang et al. introduced the point/node based compact finite difference scheme on staggered grids with the classical fractional-step method [13]. In the point/node-based method, all quantities appeared in a specific governing equation were defined on the same selected nodes and interpolated by unknowns on staggered or collocated grids by presenting all relevant interpolations. The system was solved using fully explicit second-order accurate time advancing scheme, where pressure Poisson equation was solved by a pseudo-time marching procedure. As with other pressure based methods, the efficiency of the fractional step method depends on the Poisson solver. A multigrid acceleration, which is physically consistent with the elliptic field is one possible avenue to enhance the computational efficiency.
The multigrid framework is among the most efficient iterative methods to solve linear systems arising from discretized elliptic differential equations like the pressure Poisson equation. It solves the error correction sub-problem on coarser grids and interpolates the error correction solution back to fine grids. An important aspect of multigrid method is that the coarse grid solution can be approximated by recursively using the multigrid idea. Thus, the method requires a series of different problems to be solved on a hierarchy of grids with different mesh sizes. One of the efficient multigrid methods is V-cycle that is the process that goes from finest grid down to the coarsest grid and back from the coarsest up to the finest. Considerable amount of computational time can be saved by doing major computational work on the coarser grids. For more details on multigrid, readers are referred to Wesseling [16, 17] and other recent studies on solving higher order Poisson equations with multigrid methods [18, 19, 20].
In this study, the point/node-based high-order compact fractional-step finite difference method introduced by Zhang
et al. [13] are coupled with the V-cycle multigrid acceleration for pressure Poisson equation for simulation of unsteady incompressible flow. The efficiency of explicit high-order compact scheme and efficient Mehrstellen -based V-cycle multigrid acceleration for the Poisson equation are combined together to obtain fast and accurate numerical method for high resolution desiring flows. The paper is organized as follows: The mathematical formulation of problem with derivation of the fractional-step procedure and implementation issues combined with compact interpolations are given in Section 2. Several iterative solution methods for pressure Poisson equations in the multigrid framework are explained and numerically tested in Section 3. The scheme introduced in this study are validated in Section 4 by simulating Taylor-Green vortex decaying benchmark problem for unsteady incompressible Navier-Stokes equations. The efficiency and accuracy of the method is also provided in this section which confirm their theoretical accuracy properties. Final conclusions and some comments about effectiveness of this scheme are drawn in section 5.
2. MATHEMATICAL MODEL
The governing equations describing incompressible flow in dimensionless conservative form with index notation are
i j j
i
i j
j i i
f x x
u Re x
p x
u u t u
2
1
= (1)
0 =
j j
x u
247
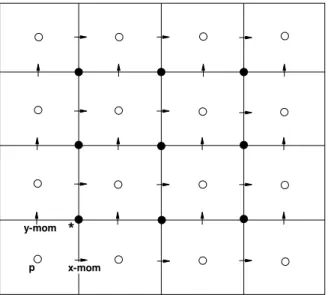
where Re is the Reynolds number, ui and fi are the velocity and body force components in the ith direction, respectively, and p is the pressure. The staggered grid system is used to eliminate well-known pressure-velocity coupling issues which is shown in Figure 1.
*
x-mom y-mom
p
Figure 1. The schematics for two-dimensional staggered grid arrangement.. The x-component of the velocity, y-component of velocity, and pressure are defined on x-mom points, y-mom points, and p point, respectively. The
values at temporary * points are used when nonlinear terms are computed.
2.1. Fractional-step Method
In advancing the momentum equations, pressure can be neglected during the predictor step. For other variants of fractional-step procedure, see [6, 7, 8]. Therefore the intermediate velocities can be computed by integrating the momentum equations as
t H u
u i
n t
n t n i
i
1
=
~ (3)
where Hi is the combination of convection, viscous diffusion and body force terms:
i j j
i
j j i
i f
x x
u Re x
u u
H
1 2
= (4)
With a second-order accuracy, the time integration can be performed with Adams-Bashforth scheme as
) 2 1 2 3 2
1 2
3 )
(
2 1 ) (
2 3 (
= 1
1 2 2
1
1
ni n i j j
n i
j j
n i
j n j i
j n j i i
n t
n
t x x f f
u Re x x
u Re x
u u
x u u t
t
H (5)
Next, at the end of the time step the velocities should be corrected according to
t x
p u u
i i n
i
1=~
(6)
248 0
= 1
i n i
x u
(7)
By substituting Eq. (6) to discretized continuity Eq. (7), the pressure Poisson equation becomes
i i
i
i x
u t x x
p
1 ~
= 2
(8)
Finally, the fractional step algorithm can be summarized as
1. Compute intermediate velocities
) 2 1 2 3 2
1 2
3 )
(
2 1 ) (
2 3 ( =
~ 2 2 1 1
1
n
i n i j j
n i
j j
n i
j n j i
j n j i n
i
i f f
x x
u Re x x
u Re x
u u
x u u t
u
u (9)
2. Solve pressure Poisson equations in order to correct velocity field such that the continuity equation is satisfied
i i
i
i x
u t x x
p
1 ~
= 2
(10)
3. Correct the intermediate velocities
t x
p u u
i i n
i
1=~
(11)
2.1. Compact Interpolations
The basic idea of compact finite difference is rather simple. The first and second order spatial derivatives of a variable in the governing equations can be obtained from its value implicitly. The conventional method of deriving compact difference schemes using a truncated Taylor series and determining the coefficients of the interpolations based on the desired accuracy is straightforward and given by Lele [12] for uniform grid spacing and Shukla et al.[21] for nonuniform grid spacing. For any scalar pointwise value of u, the derivatives of u is obtained by solving a tridiagonal matrix system using the well-known Thomas algorithm. For example, the first derivatives can be given at internal nodes as follows:
h u u b h
u u a u u
u 'i i i i i
' i ' i
4 2
= 1 1 2 2
1
1
(12)
which gives rise to a -family of tridiagonal schemes with ( 2) 3 2
=
a , and (4 1)
3 1
=
b . Here, =0 leads
to the explicit non-compact fourth-order scheme for the first derivative. A classical compact fourt-order scheme, which is also known as Pade scheme, is obtained by =1/4. The truncation error in the Eq. (12) is
(5) 4 1) (3 5!
4
u h
. Therefore, a sixth-order tridiagonal scheme is also obtained by choosing =1/3. The compact
interpolations used in this study for computing the spatial derivatives for prediction and correction steps, Eq. (9) and Eq. (11), are given in the Appendix for completeness. In order to speed-up the simulation, we are introducing the compact Mehrstellen-based iterative solution procedure for pressure Poisson equation, Eq. (10), with the fourth-order accuracy. The procedure is explained in the following section within the multigrid framework.
3. MULTIGRID ACCELERATION FOR POISSON EQUATION
249
Poisson equation need to be solved accurately by taking quite longer CPU time than the outer time integration procedure.
3.1. The Fourth-order Compact Discretization Scheme for the Poisson Equation
The Poisson equation given in Equation (10) can be written in the form of £p=S, where the £ operator is the
discrete Laplacian i i x x 2 =
£ , and
i i x u t S ~ 1 =
. For simplicity, the two-dimensional Poisson equation is
S y p x p = 2 2 2 2 (13)
Then, the general fourth order compact discretization scheme with nine point stencil can be written as [19] ) (8 2 = ) ( ) ( ) ( 1 , 1 , 1, 1, , 2 1 1, 1 1, 1 1, 1 1, 1 , 1 , 1, 1, , j i j i j i j i j i j i j i j i j i j i j i j i j i j i S S S S S x p p p p d p p c p p b ap
(14)
where the coefficients in Equation (14) are a=10(12), b=52, c=521, and d=(12)/2. Here is the mesh aspect ratio =x/y. For =1 the scheme is well known and is sometimes called Mehrstellen. The sparse linear system formed by Eq. (14) at all interior grid points has nine nonzero diagonals. It is usually advantageous to solve such sparse linear systems using a point iterative method with multigrid acceleration. For example, Point-Jacobi(PJ) or Gauss-Seidel (GS) relaxation schemes. The GS relaxation scheme for system described by Eq. (14) is
)] ( ) ( ) ( ) (8 2 [ 1 = 1 1, 1 1, 1 1, 1 1, 1 , 1 , 1, 1, 1 , 1 , 1, 1, , 2 , j i j i j i j i j i j i j i j i j i j i j i j i j i j i p p p p d p p c p p b S S S S S x a p (15)
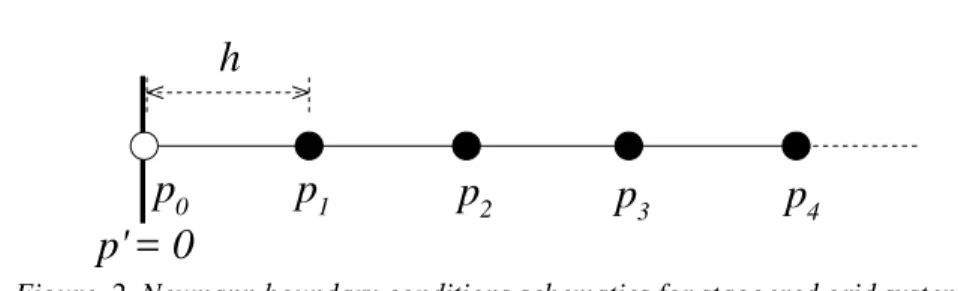
where we use new values as soon as we get them. Different from GS, PJ iteration takes all the values from previous iterations. The behaviour of all these point based iterative method in the multigrid framework will be also tested in this study. Since Mehrstellen type of discretization has compact form of stencils, Drichlet type of boundary conditions can be directly introduced. For the Neumann type of boundary conditions again forth order accurate representation for staggered grid configuration shown in Figure 2 can be computed from interior points according to
) 22 111 225 (229 93 1
= 1 2 3 4
0 p p p p
p (16)
p
4p' = 0
p
0p
1p
2p
3h
Figure 2. Neumann boundary conditions schematics for staggered grid system.
Alternatively, we can use pseudo-time marching iterative relaxation procedure as Zhang et al.[13] implemented in their computations by using compact interpolation. In there, the pseudo-time marching procedure is given as:
) £ ( = 1 S p p
250
where £p can be computed from compact interpolations. The main disadvantage of this pseudo-time iterations is numerical stability restriction due to the changing character of partial differential equations from elliptic to parabolic to obtain steady state solution. The stability criterion for pseudo-time step is given as
2 1 1
1
2
2
x y (18)
The comparisons of pseudo-time iterative scheme and Mehrstellen based relaxation schemes will be shown later.
3.2. V-cycle Multigrid Method
In order to solve Poisson equation effectively, the V-cycle multigrid procedure is constructed with standard mesh coarsening strategy (the coarser grid mesh size is double that of the finer grid). This methods is an effective algorithm to accelerate the convergence for relaxation methods [16, 17]. The method effectively reduces the error of longer wavelength than the grid interval. In this framework, we need to transfer residual from the fine grid to the coarse grid. The residual r=S£p for the Mehrstellen type of compact discretization can be computed as [19]
)] ( ) ( ) ( [ 6 1 ) (8 12 1 = 1 1, 1 1, 1 1, 1 1, 1 , 1 , 1, 1, , 2 1 , 1 , 1, 1, , , j i j i j i j i j i j i j i j i j i j i j i j i j i j i j i p p p p d p p c p p b ap x S S S S S r (19)
The transfer action is done by restriction operators, denoted by Ih2h, i.e., Ih2hrh =r2h. For two dimensional domain, the simplest restriction operator is direct injection. The coarse grid points take the fine grid point values directly as
h j i h j i r
r 2,2 2
, = (20)
Another common restriction operator is defined as half weighting by
) 4 (
8 1
= 2,2 1 2,2 1 2 1,2 2 1,2 2,2
2
,hj hi j hi j hi j hi j hi j
i r r r r r
r (21)
Alternatively, the most accurate restriction operator is the full weighting averaging which is given as
] 4 ) 2( [ 16 1
= 2 1,2 1 2 1,2 1 2 1,2 1 2 1,2 1 2,2 1 2,2 1 2 1,2 2 1,2 2,2
2 , h j i h j i h j i h j i h j i h j i h j i h j i h j i h j
i r r r r r r r r r
r (22)
Among those restriction operators the latter one is more appropriate for high-order simulations [19]. The transformation from the coarse grid to fine is also given by bilinear prolongation operator, I2hh, as [17]
) ( 4 1 = ) ( 2 1 = ) ( 2 1 = = 2 1 1, 2 1 , 2 1, 2 , 1 1,2 2 2 1 , 2 , 1 ,2 2 2 1, 2 , 1,2 2 2 , ,2 2 h j i h j i h j i h j i h j i h j i h j i h j i h j i h j i h j i h j i h j i u u u u u u u u u u u u u (23)
251
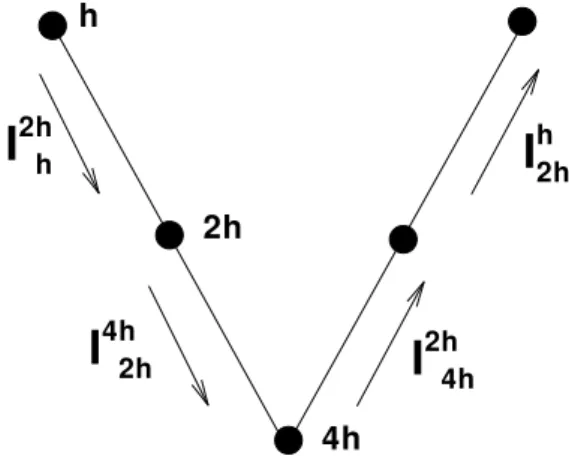
methods. The V-Cycle multigrid algorithm does one correction on each level. Since computations on coarse levels are relatively cheap, such actions may pay for the incurred costs. In the V-Cycle algorithm physical boundary values are only required for the finest grid, they are also zero on the coarser grids. And the initial guesses are zero for all coarser grids. The V-cycle multigrid algorithm for (n=3) level grid shown in Figure 3 is summarized as:
1. Relax 1 times on £huh = fh with initial guess uhk 2. Compute restriction f2h=r2h=Ih2h(fh£huh) 3. Relax 1 times on £2hu2h= f2h with initial guess zero 4. Compute restriction f4h=r4h=I24hh(f2h£2hu2h)
5. Solve exactly on £4hu4h= f4h with initial guess zero; 6. Correct by prolongation 2 = 2 42 ( 4h £4h 4h)
h h h
h u I f u
u
7. Relax 2 times on £2hu2h= f2h with initial guess u2h 8. Correct by prolongation uh=uhI2hh(f2h£2hu2h) 9. Relax 2 times on £huhk1= fh with initial guess uh
h
I
4h2h4h
2h
I
2hhI
h2h
I
2h4hFigure 3: Three level (n=3) V-cycle multigrid hierarchy
The number of presmoothing (1) and postsmoothing (2) numbers may depend on considered problem. More relaxation on each level lead to faster convergence with higher cost. In this study, n level V-cycle algorithm with two relaxation sweeps on each level is considered (1=2 =1). In order to characterize of computational cost we
can define a work unit (WU) which shows the cost of performing one relaxation sweep on the finest grid. Therefore, the equivalent total fine grid work units can be computed as:
2 2
2 1
1
= 2
) (
=
nn
i
k
WU (24)
where k is the outer iteration number.
3.3. Numerical Experiments for Poisson Equation
Here numerical experiments are conducted to solve a two-dimensional Poisson Equation (13) on the unit square domain [0,1][0,1]. The source term S and the boundary conditions are prescribed to satisfy the exact solution
)) (2 ) (2 ( 4
1 = ) ,
(x y 2 cos x cos y
p
(25)
252
reduced to the specified tiny number, i.e., 10-8. The root mean square shows measure of averaged L2 norm of the difference between numerical and exact solution as:
2 , , 1 = 1 =
) (
1 | | =
| | ij iexactj
j N
j i N
i j i
p p N
N
p
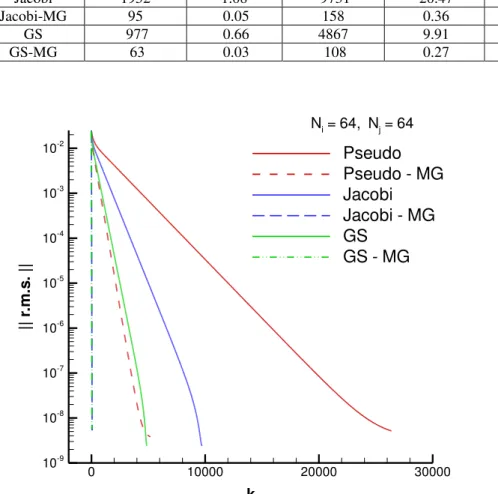
(26)First we compare the efficiency of the iterative methods with and without multigrid acceleration. Table 1 compares the number of work units (WU) and the CPU time in seconds for these methods with three different finest grid resolutions. We see that the relaxation schemes with Mehrstellen type of compact discretization is quite faster the pseudo-type iteration even if we use maximum allowable . We can also see another disadvantage of pseudo-time iteration that the multigrid framework does not suitable for this type of iteration. However, when the multigrid method is implemented with Mehrstellen based relaxation schemes, the Poisson equations can be solved more than 100 times faster. It is apparent that the multigrid method is effective for the improvement of the convergence efficiency of these schemes(i.e., PJ and GS). Moreover, comparisons between pseudo-time and GS-MG shows that the acceleration rate in term of CPU time is improved 770 times for N=64 and this speed-up is increasing with higher grid resolutions.
Table 1. Efficiency data for the high-order pressure Poisson iterative methods
N
=
32
N
=
64
N
=
128
Method
WU
CPU[
s
]
WU
CPU[
s
]
WU
CPU[
s
]
Pseudo 10935 9.78 41541 144.27 157636 3204.42
Pseudo-MG 6337 4.59 20986 66.33 72680 1731.24
Jacobi 1952 1.08 9731 20.47 46600 570.87
Jacobi-MG 95 0.05 158 0.36 245 3.76
GS 977 0.66 4867 9.91 23301 217.98
GS-MG 63 0.03 108 0.27 170 2.18
k
||
r.
m
.s
.
||
0 10000 20000 30000
10-9
10-8 10-7 10-6 10-5 10-4 10-3
10-2
Pseudo
Pseudo - MG
Jacobi
Jacobi - MG
GS
GS - MG
Ni= 64, Nj= 64
253
The convergence history for N=64 is shown in Figure 4 in order to get more accurate insight of convergence rate. It is again apparent that MG method is very efficient for relaxation schemes. Pseudo-time iteration hits machine zero earlier. Someone can think that in the numerical simulation of Navier-Stokes equation, usually previous time step values for pressure are used as initial guess for current step. However if we look the acceleration rate for the schemes, in the linear relaxation regime, in order to reduce average norm of | |p| | to just one order (i.e., from 104 to 105), we need 3822 iteration with pseudo-time marching method, just 5 iterations with GS-MG methods. When the multigird method with a Mehrstellen based relaxation scheme is used, the convergence rate increases order of 1000 times compared with that of the pseudo-type of iterative method. Another issue is the order of accuracy which can be tested by the following formula
(1/2) ) | | | | / | | (| |
= 2
, 2
ln p p
ln
n NN N N (27)
Table 2 shows the accuracy data and order of discretization n. Results verify that the fourth order accuracy for the relaxation schemes. Although, pseudo-schemes has the order of accuracy of almost 6, the results in Table 2 show also that the solution computed from Mehrstellen based relaxation schemes is much more accurate than that of the pseudo-time marching algorithm.
Table 2. Accuracy data for the high-order pressure Poisson iterative methods
Method
16 =
N
| | | |p
32 =
N
| | | |p
64 =
N
| | | |p
128 =
N
| |
| |p ( )
32,16 n
O O(n64,32) O(n128,64)
Pseudo 1.15E-05 1.94E-07 3.53E-09 6.51E-10 5.89 5.78 2.45
Jacobi 6.51E-07 3.89E-08 2.39E-09 1.48E-10 4.07 4.02 4.01
GS 7.11E-07 3.96E-08 2.40E-09 1.48E-10 4.17 4.05 4.02
4. NUMERICAL EXPERIMENTS FOR 2D NAVIER-STOKES EQUATION
In this section, the non-dimensional unsteady incompressible Navier-Stokes equations are solved on a two-dimensional square domain for the Taylor-Green vortex decaying problem. In fluid dynamics, the Taylor-Green vortex is a two-dimensional, unsteady flow of a decaying vortex, which has the exact closed form solution of incompressible Navier-Stokes equations in Cartesian coordinates. The exact solution of this vortex flow in
[0,1]
[0,1] domain is given by
) ( ) ( ) ( = ) , ,
(x y t sin x cos y Ft
u (28)
) ( ) ( ) ( = ) , ,
(x y t cos x sin y F t
v (29)
where F(t)=exp(2t2/Re) denotes the strength of the vortex, decreasing in time due to viscous dissipation. The pressure field p can be obtained by substituting the velocity solutions in the momentum equations and is given by
)] (2 ) (2 [ 4
) ( = ) , , (
2
y cos x cos t F t y x
p (30)
This problem can be solved using periodic boundary conditions or using no-slip boundary conditions for velocities and Neumann boundary conditions for pressure. The Reynolds number is set to Re=10 and the final non-dimensional time is t=1. The grid system used in the computation includes NiNj =88, 1616, 3232 , and
64
64 , whereNi, andNjrepresents the number of cells forxandydirections. The variation of velocity component
254
acceleration parameter which is the ratio of total CPU times with respect to Poisson solvers. In the simulations the termination criteria for the pressure Poisson equation is set for averaged L2 norm of residual | |S£p| |108. Since the fractional-step algorithm depends on the pressure Poisson equation, as shown from the Table 3, the pseudo-time iterations is not efficient in this framework. The results demonstrate that the fractional-step compact Navier-Stokes solver with Gauss-Seidel multigrid (GS-MG) acceleration is 218 times faster than that of with pseudo-time method for N=6464 grid, and increasing with increasing grid resolution. It shows that for large scale problem, the GS-MG method with compact finite difference fractional step procedure becomes very efficient algorithm to solve incompressible flows.
Table 3: Efficiency comparisons for different grid numbers
Grid sytem CPU time [s] Speed-up
i
N x Nj Pseudo(t1) GS(t2) GS-MG(t3) 1/2=t1/t2 1/3=t1/t3
8
8 0.77 0.14 0.11 5.42 7.03
16
16 35.59 4.67 2.13 7.61 16.71
32
32 1695.20 217.89 25.23 7.78 67.10
64
64 46159.53 5872.71 211.45 7.86 218.30
The accuracy of methods are also shown Table 4. The root mean square values for u are computed according to Eq. (26). The order of accuracy can also be tested using one of the variables, say u velocity component, according to Eq. (27). The results presented here indicate that the same accuracy can be get by using multigrid accelerated framework. In terms of accuracy and the effective order of accuracy there is no difference between with and without multigrid acceleration in the Poisson equation. However, in terms of computational efficiency, multigrid acceleration speed up the simulation drastically, because of fast Poisson solution of O(N) instead of O(N2) without multigrid acceleration. The results also demonstrate that the effective order of accuracy agree with the theoretical order of accuracy. The simulations here are performed with using the time step t=0.0001. Since the scheme is
) ( t2
O , it is expected to get less values(i.e., 3.56 for O(n64,32) ) for bigger grid resolution due to the decreasing spatial error.
Table 4: The effective accuracy and order of accuracy test
Method | |u| |88 | |u| |1616 | |u| |3232 | |u| |6464 O(n16,8) O(n32,16) O(n64,32) Pseudo 6.77E-04 2.03E-05 7.90E-07 6.57E-08 5.0607 4.6823 3.5883
GS 6.63E-04 1.99E-05 7.69E-07 6.48E-08 5.0561 4.6966 3.5695
GS-MG 6.63E-04 1.99E-05 7.69E-07 6.48E-08 5.0561 4.6966 3.5695
255 y
u
0 0.2 0.4 0.6 0.8 1
-0.5 0 0.5
8 x 8 16 x 16 32 x 32 Exact
x
v
0 0.2 0.4 0.6 0.8 1
-0.5 0 0.5
8 x 8 16 x 16 32 x 32 Exact
Figure 5. Comparison of velocity components with exact solution for Re=10 at t=1; (a) u component of velocity along x=1/2 , (b) v component of velocity along y=1/2.
p
0.3 0.25 0.2 0.15 0.1 0.05 0 -0.05 -0.1 -0.15 -0.2 -0.25 -0.3
Figure 6. Pressure contours and velocity streamlines forRe=10 at t=1.
5. CONCLUSIONS
256
procedure with and without multigrid acceleration is also analyzed in order to get an idea of true comparison between them. In those cases the efficiency ratios for 64x64 grid resolution are 1:27, respectively. It is also important to notice that those relative efficiencies keep increasing with higher resolutions. Therefore, the present method can be used as an efficient high-order accurate solver of incompressible flow problems.
6. REFERENCES
[1]. Kwak D., Kiris C., Kim C.S., Computational challenges of viscous incompressible flows. Computers and Fluids 2005; 34:283--299.
[2]. Chorin, A.J., A numerical method for solving incompressible viscous flow problems. Journal of Computational Physics 1967; 2:12--26.
[3]. Soh, WY and Goodrich, J.W., Unsteady solution of incompressible Navier-Stokes equations. Journal of Computational Physics 1988; 79:113--134.
[4]. Mateescu, D. and Paidoussis, MP and Belanger, F., A time-integration method using artificial compressibility for unsteady viscous flows. Journal of Sound and Vibration 1994; 177:197--205.
[5]. Chorin, A.J., Numerical solution of the Navier-Stokes equations. Mathematics of Computation 1968; 22:745--762. [6]. Kim, J. and Moin, P., Application of a fractional-step method to incompressible Navier-Stokes equations. Journal of
Computational Physics 1985; 59:308--323.
[7]. Brown, D.L. and Cortez, R. and Minion, M.L., Accurate projection methods for the incompressible Navier-Stokes equations. Journal of Computational Physics 2001; 168:464--499.
[8]. Guermond, JL and Minev, P. and Shen, J., An overview of projection methods for incompressible flows. Computer Methods in Applied Mechanics and Engineering 2006; 195:6011--6045.
[9]. Hafez M., Numerical Simulation of Incompressible Flows. World Scientific, 2002.
[10]. Harlow F.H., Welch J.E., Numerical calculation of time-dependent viscous incompressible flow with free surface. Phys Fluids 1965; 8(12):2182--9.
[11]. Blasco J., Codina R., Huerta A., A fractional-step method for the incompressible Navier-Stokes Equations related to predictor-corrector algorithm. International Journal for Numerical Methods in Fluids 1998; 28:1391--1419.
[12]. Lele S.K., Compact finite difference schemes with spectral-like resolution. Journal of Computational Physics 1992; 103:16--42.
[13]. Zhang K.K.Q., Shotorban B., Minkowyczand W.J., Mashayek F., A compact fnite difference method on staggered grid for Navier-Stokes flows. International Journal for Numerical Methods in Fluids 2006; 52:867--881.
[14]. Knikker R., Study of a staggered fourth-order compact scheme for unsteady incompressible viscous flows. International Journal for Numerical Methods in Fluids 2009; 59:1063--1092.
[15]. Ferreira V.G., Kurokawa F.A., Queiroz R.A.B., Kaibara M.K., Oishi C.M., Cuminato J.A., Castelo A., Tomé M.F., McKee S., Assessment of a high-order finite difference upwind scheme for the simulation of convection?diffusion problems. International Journal for Numerical Methods in Fluids 2009; 60:1--26.
[16]. Wesseling P., An Introduction to Multigrid Methods. Wiley: Chichester, 1992.
[17]. Moin, P., Fundamentals of Engineering Numerical Analysis. Cambridge University Press, 2001.
[18]. Gupta, M.M. and Kouatchou, J. and Zhang, J., Comparison of Second-and Fourth-Order Discretizations for Multigrid Poisson Solvers. Journal of Computational Physics 1997; 132:226--232.
[19]. Wang Y., Zhang J., Sixth order compact scheme combined with multigrid method and extrapolation technique for 2D poisson equation. Journal of Computational Physics 2009; 228:137--146.
[20]. Sakurai K., Aoki T., Lee W.H., Kato K. Poisson equation solver with fourt-order accuracy by using interpolated differential operator scheme., Computers and Mathematics with Applications 2002; 43:621--630.
[21]. Shukla R. K., Zhong X., Derivation of high-order compact finite difference schemes for non-uniform grid using polynomial interpolation. Journal of Computational Physics 2005; 204:404--429.
[22]. Botella O., Peyret R., Benchmark spectral results on the lid-driven cavity flow. Computers and Fluids 1998; 27:421--433.
7. APPENDIX: COMPACT INTERPOLATIONS
7.1. Interpolations from staggered to collocated points for the zeroth-order derivatives:
i+2 N-1
1 2 i-1 i i+1
N
N+1
N
0
0 1 i-1 i i+1 N-1
Figure 7. Interpolations from staggered to collocated points for the zeroth order derivatives
257
( )
2 2 1 2 3
= 1 0 2 4
1
0 O h
(31)
( )
2 10
1 2 2 3 = 10
3 10
3 1 1 2 6
1
1 O h
i i i
i i
i
i
(32)
( )
2 2 1 2 3
= 1 1 4
1 O h
N N N N
N
(33)
There is no need to specify boundary conditions by constructing the interpolations from staggered grid to the collocated grids.
7.2. Interpolations from collocated to staggered points for the zeroth-order derivatives:
i+1 N-1
0 1 i-2 i-1 i
N+1
b
N
b
0 1 2 i-1 i i+1 N-1 N
Figure 8. Interpolations from collocated to staggered points for the zeroth-order derivatives
Similarly, schematics for the interpolations from collocated grid to staggered grid points for function itself is shown in Figure 8. The corresponding tridiagonal system with including the boundary values is established as
( )
2 2 1 2 3
= 0 1 4
1
0 O h
b
(34)
( )
2 10
1 2 2 3 = 10
3 10
3 1 2 1 6
1
1 O h
i i i i i
i
i
(35)
( )
2 2 1 2 3
= 1 1 4
1 Oh
N N N N
N
(36)
7.3. Interpolations from staggered to collocated points for the first-order derivatives:
i+2 N-1
1 2 i-1 i i+1
'N
N+1
N
0
'0 '1 'i-1 'i 'i+1 'N-1
Figure 9. Interpolations from staggered to collocated points for the first-order derivatives
Schematics for the interpolations from staggered grid to collocated grid points for the first-order derivatives is shown in Figure 9. The corresponding tridiagonal system becomes
0 1 = 1 0 2 1 O(h3)
h h
'
'
(37)
( )
3 62 17 62
63 = 62
9 62
9 1 2 1 6
1
1 Oh
h h
i i i
i '
i ' i '
i
(38)
1 = 1 1 O(h3)
h h
N N N N '
N '
N
(39)
7.4. Interpolations from collocated to staggered points for the first-order derivatives:
i+1 N-1
0 1 i-2 i-1 i
'N+1
b
N
b
'0 '1 '2 'i-1 'i 'i+1 'N-1 'N
258
Similarly, schematics for the interpolations from from collocated to staggered points for the first-order derivatives is shown in Figure 10. The corresponding tridiagonal system becomes
0 1 = 0 1 0 O(h3)
h h b ' ' (40) ( ) 3 62 17 62 63 = 62 9 62
9 1 1 2 6
1
1 Oh
h h i i i i ' i ' i ' i (41)
1= 1 1 O(h3)
h h N N N N ' N ' N (42)
7.5. Interpolations from collocated to collocated points for the first-order derivatives:
i+2 N-1
0 1 i-2 i-1 i N b
b
'0 '1 'i-1 'i 'i+1 'N-1 'N
i+1
Figure 11. Interpolations from collocated to collocated points points for the first-order derivatives
Similarly, schematics for the interpolations from collocated to collocated points for the first-order derivatives is shown in Figure 11. The corresponding tridiagonal system becomes
( ) 3 2 1 2 3
= 1 0 2 4
1
0 O h
h h
b '
'
(43)
( ) 4 9 1 2 9 14 = 3 1 3
1 1 1 2 2 6
1
1 O h
h h i i i i ' i ' i ' i
(44)
( ) 3 2 1 2 3
= 1 2 4
1 O h
h h N b N N ' N ' N
(45)
7.6. Interpolations from collocated to collocated points for the second-order derivatives:
i+2 N-1
0 1 i-2 i-1 i N b
b
"0 "1 "i-1 "i "i+1 "N-1 "N
i+1
Figure 12. Interpolations from collocated to collocated points for the second-order derivatives
Schematics for the interpolations from staggered to staggered points for the second-order derivatives is shown in Figure 12. The corresponding tridiagonal system becomes
= 2 2 ( 3)
2 2 1 0 2 1 0 1
0 O h
h h b ' ' ' '
(46)
2 ( )
5 6 = 10 1 10 1 4 2 1 1 1
1 O h
h i i i ' ' i ' ' i ' ' i
(47)
( ) 4 2 11 3 2 11 12 = 11 2 11 2 6 2 2 2 2 1 1 1
1 O h
h h i i i i i i '' i ' ' i '' i (48) ) ( 2 2 = 3 2 2 1 2 1
1 Oh
h h N N N N N b ' ' N ' ' N (49)
7.7. Interpolations from staggered to staggered points for the second-order derivatives:
i+2 N-1
0 1 i-2 i-1 i N b
b '' 0 '' i-1 '' i '' i+1 '' N-1 '' 1 '' N i+1 h/2 h
259
Similarly, schematics for the interpolations from staggered to staggered points for the second-order derivatives is shown in Figure 13. The corresponding tridiagonal system becomes
( ) 23 12 23 36 = 23 11 3 2 1 2 2 0 1 1
0 O h
h h ' ' ' ' (50)
2 ( )
5 6 = 10 1 10 1 4 2 1 1 1
1 O h
h i i i ' ' i ' ' i ' ' i
(51)
( ) 4 2 11 3 2 11 12 = 11 2 11 2 6 2 2 2 2 1 1 1
1 O h
h h i i i i i i ' ' i ' ' i ' ' i (52) ) ( 23 12 23 36 = 23 11 3 2 1 2 1
1 Oh
h h N N N N ' ' N ' ' N (53)
7.8. Interpolations from collocated to staggered points for the second-order derivatives:
i+1 N-1
0 1 i-2 i-1 i
"N+1
b
N
b
"0 "1 "2 "i-1 "i "i+1 "N-1 "N
Figure 14. Interpolations from collocated to staggered points for the second-order derivatives
Similarly, schematics for the interpolations from collocated to staggered points for the second-order derivatives is shown in Figure 14. The corresponding tridiagonal system becomes
0 1 =2 220 1 O(h2)
h b ' ' ' ' (54)
2 ( )
7 6 2 7 6 = 14 5 14 5 4 2 1 1 2 1 2 1
1 O h
h h i i i i i i ' ' i ' ' i ' ' i (55)
1=2 2 2 1 O(h2)
h N N b ' ' N ' ' N (56)
7.9. Interpolations from staggered to collocated points for the second-order derivatives:
i+2 N-1
1 2 i-1 i i+1
"N
N+1
N
0
"0 "1 "i-1 "i "i+1 "N-1
Figure 15. Interpolations from staggered to collocated points for the second-order derivatives
Similarly, schematics for the interpolations from staggered to collocated points for the second-order derivatives is shown in Figure 15. The corresponding tridiagonal system becomes
=2 2 ( 2)
2 2 1 0 1
0 O h
h ' ' ' ' (57)
2 ( )
7 6 2 7 6 = 14 5 14 5 4 2 2 1 2 1 1 1
1 O h
h h i i i i i i ' ' i ' ' i ' ' i (58)
=2 2 ( 2)
2
1 1
1 O h
h N N N ' ' N ' ' N